
Extended Kalman Filter-Enhanced LQR for Balance Control of Wheeled Bipedal Robots



Abstract
1. Introduction
- To address the limitation that conventional wheeled and legged robots cannot simultaneously achieve terrain adaptability and high mobility, a wheeled bipedal robot is designed by integrating the advantages of both locomotion modes. For the standing and walking balance control problem, an LQR-based balance control algorithm is developed based on the robot’s dynamic model. Considering the presence of various noise sources during motion and aiming to reduce controller complexity, the EKF is incorporated to smooth the LQR control torque. Accordingly, a KLQR balance control algorithm combining EKF and LQR is proposed, where the EKF is applied to the LQR-generated control torque rather than to the system state, in order to enhances the smoothness and robustness of the robot’s motion.
- An experimental platform is established, consisting of the wheeled bipedal robot, an IMU sensing system, and an industrial PC with a real-time operating system. Comparative experiments with different filtering algorithms demonstrate that the integrated the EKF effectively suppresses spikes in the control torque. Furthermore, experimental results verify that the proposed KLQR balance control algorithm mitigates steady-state oscillations, improves robustness, and maintains excellent performance during walking and turning maneuvers at various speeds.
2. LQR Balance Control Algorithm for Wheeled Bipedal Robots Based on the Dynamic Model
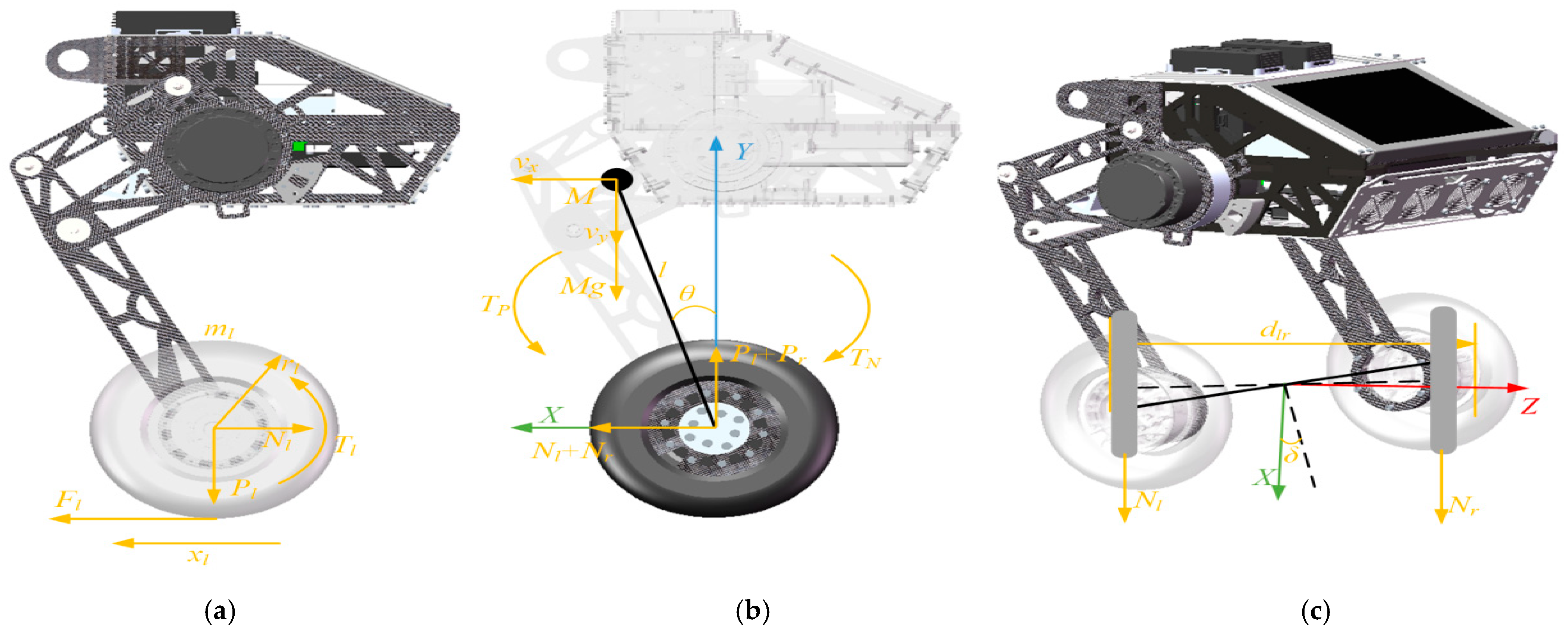
2.1. Dynamic Model Based on Newtonian Mechanics
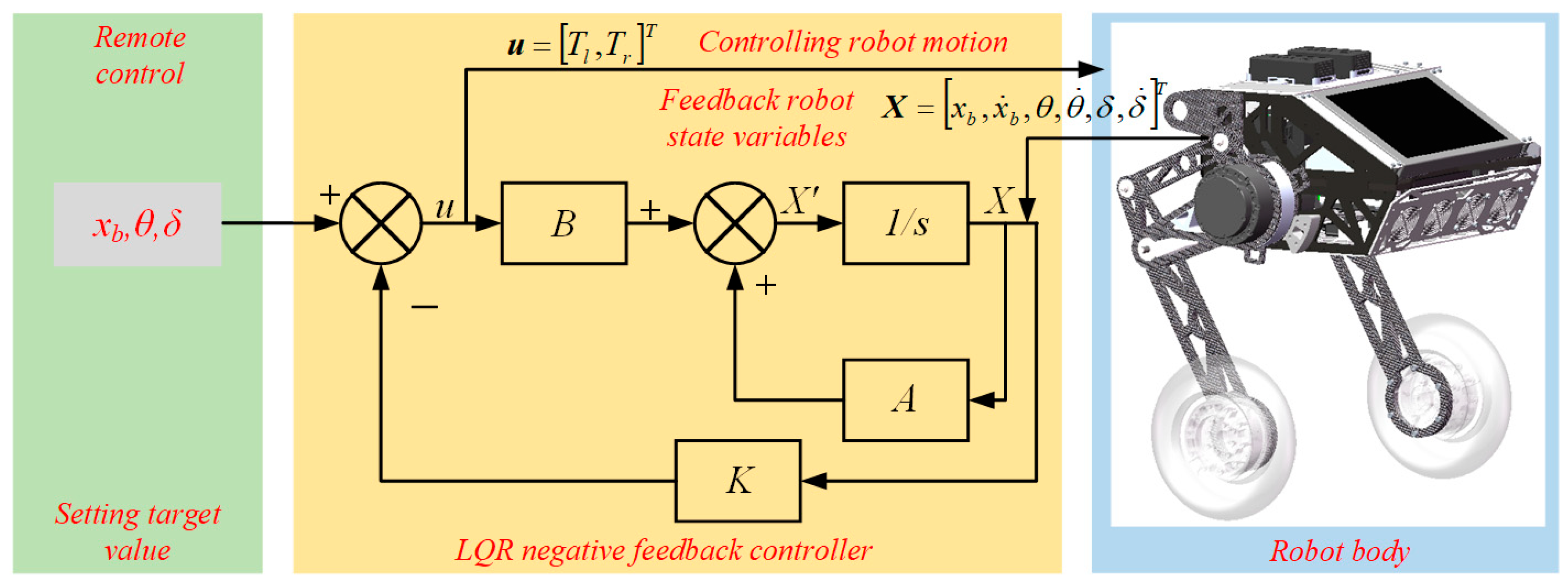
2.2. LQR Balance Control Algorithm Based on the Dynamic Model
3. Data Smoothing Using Extended Kalman Filter
3.1. Principle of Data Smoothing with Extended Kalman Filter
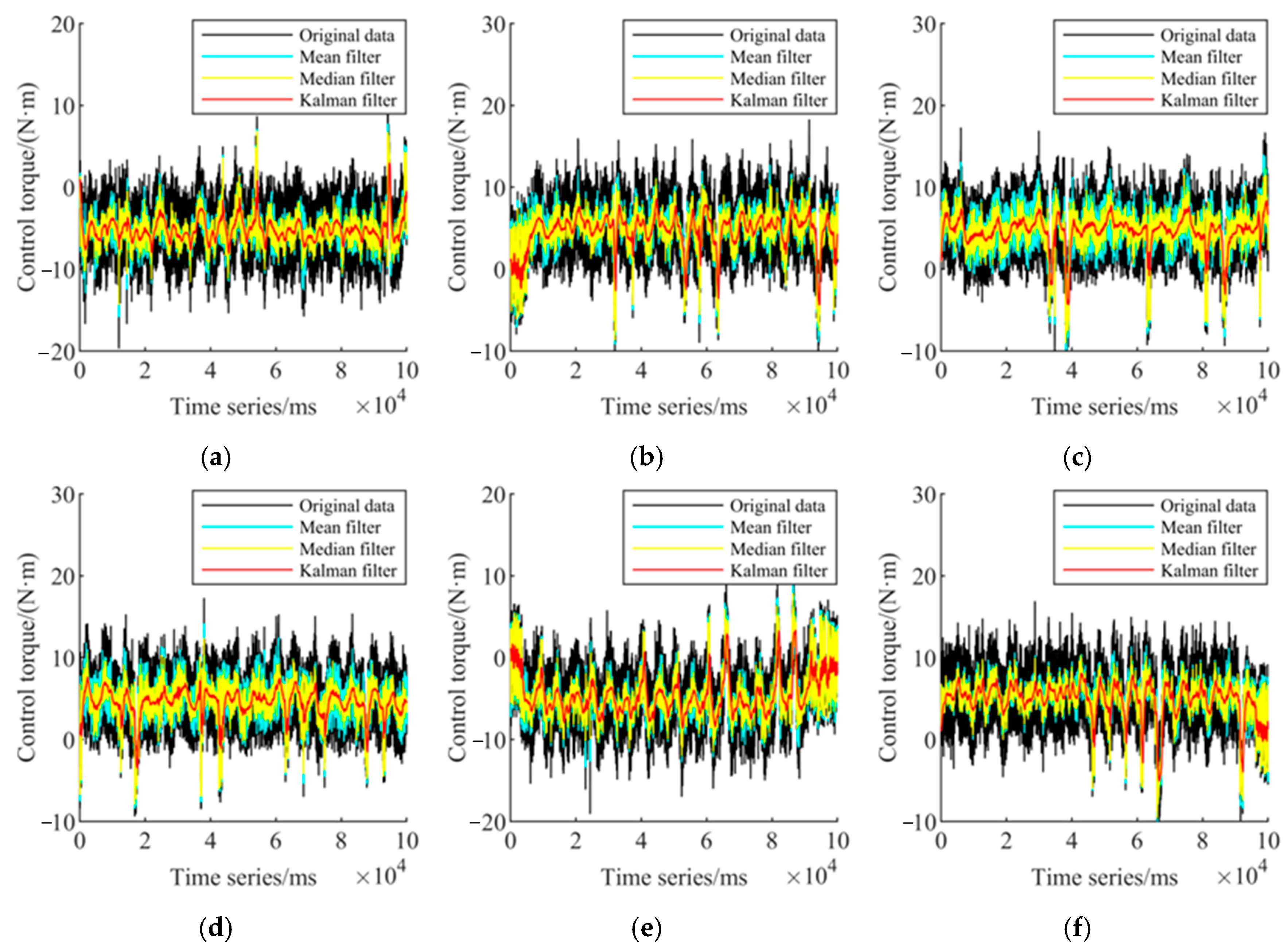
3.2. Performance Evaluation and Analysis of the Extended Kalman Filter
4. Experiments and Result Analysis
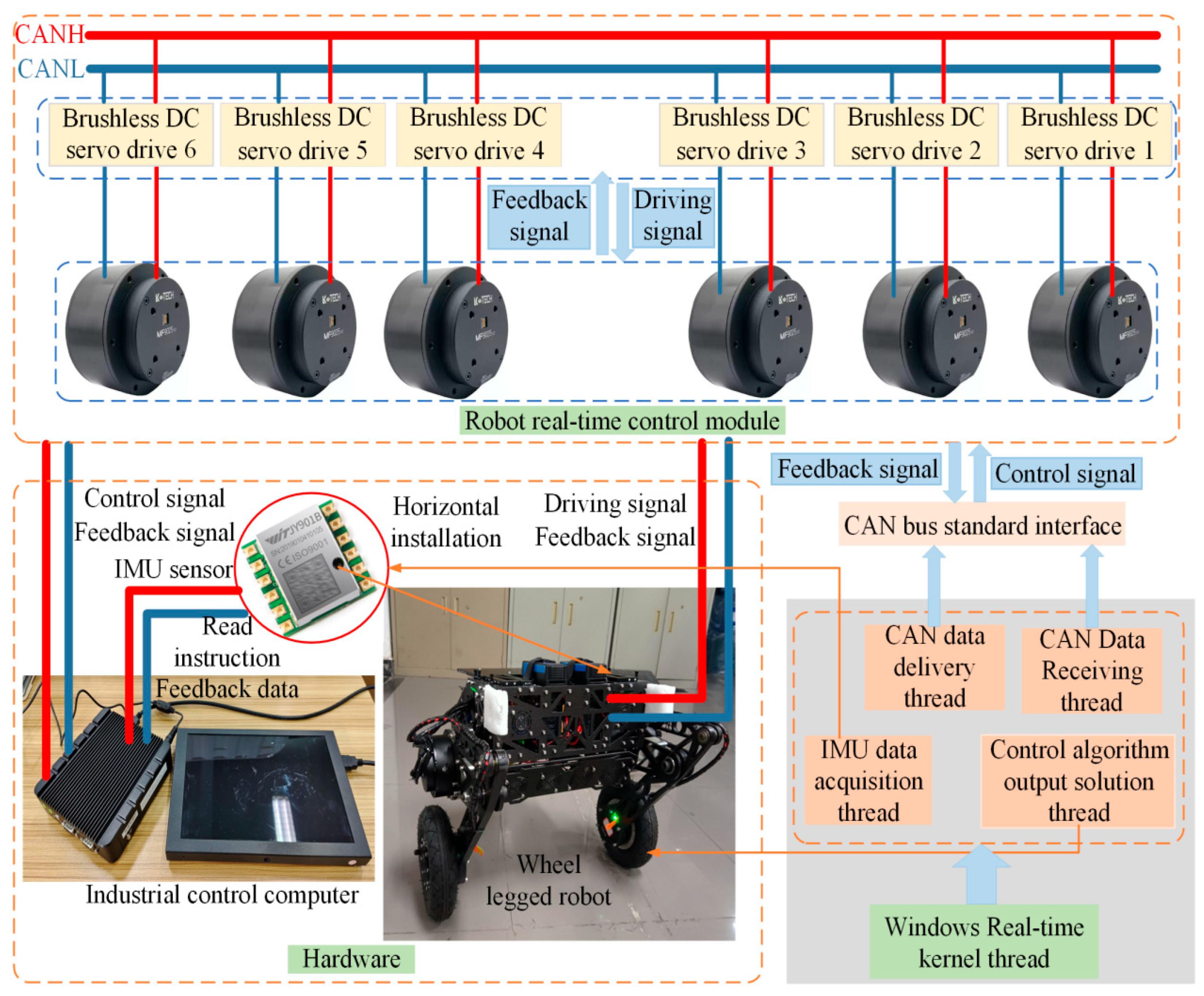
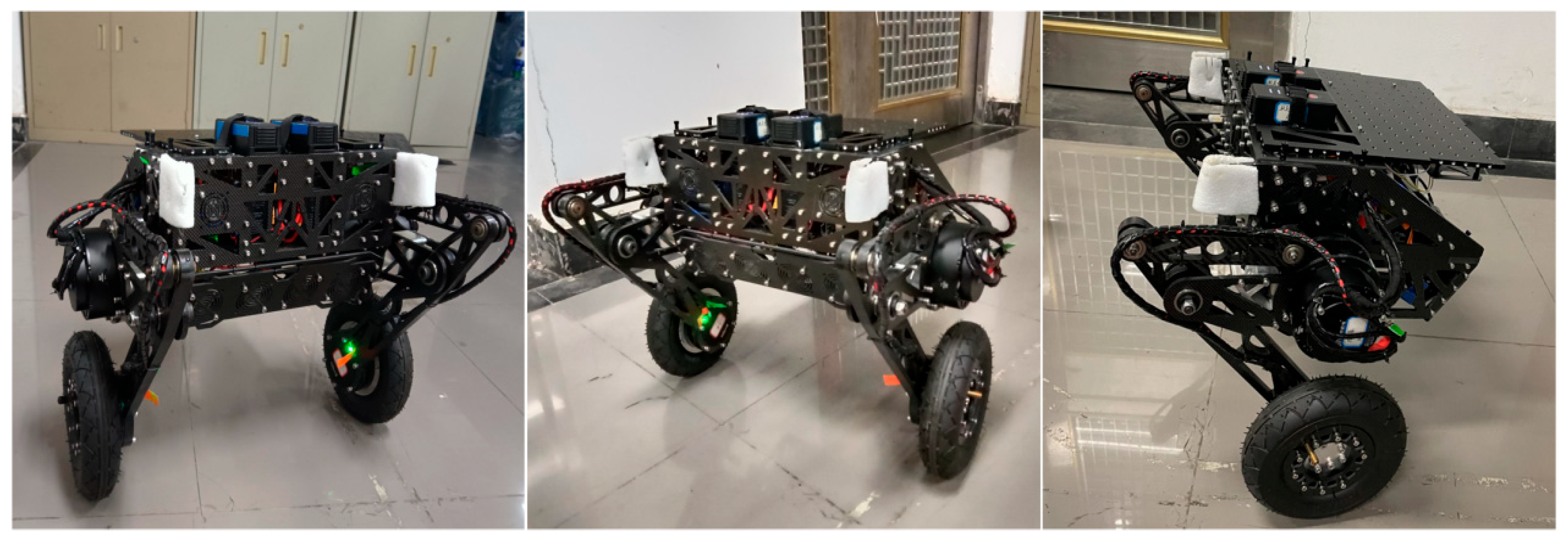
4.1. Balance Control Experiment Platform for the Wheeled Bipedal Robot
4.2. Static Balance Control Experiment and Result Analysis
- Experiment 1
- 2.
- Experiment 2
- 3.
- Experiment 3
4.3. Walking and Turning Balance Control Experiments and Result Analysis
- 1.
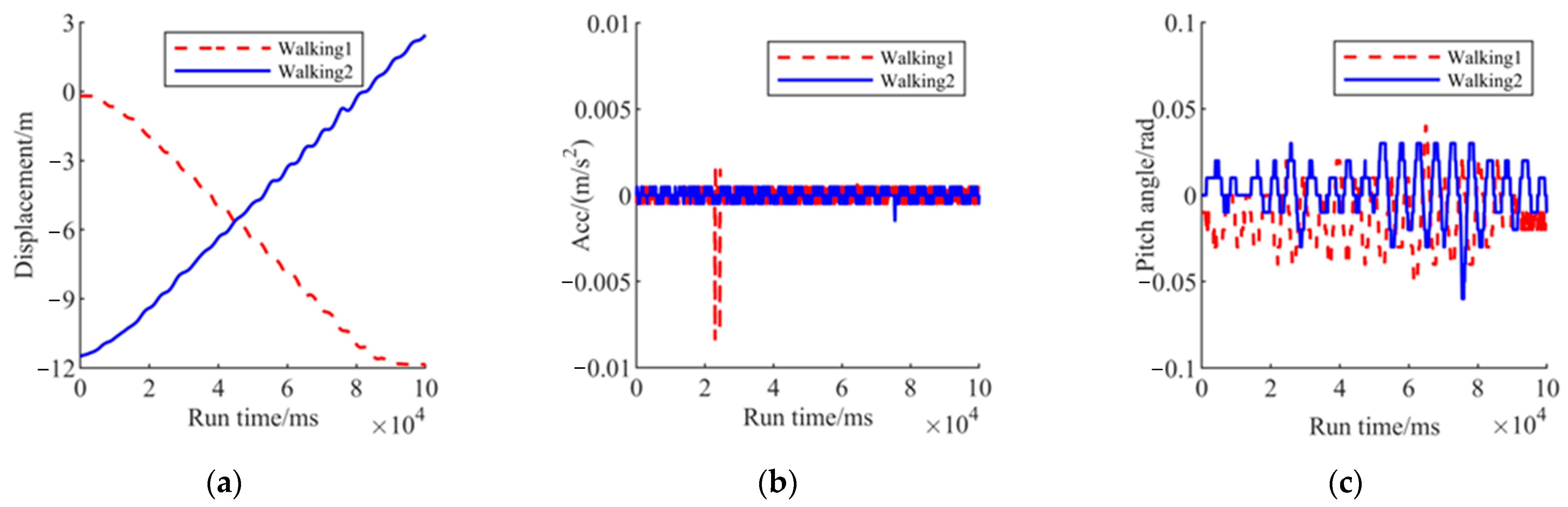
- Uniform Linear Walking Balance Experiments
- 2.
- Turning Balance Experiments
4.4. Comparison with Existing Methods
5. Conclusions
- 1.
- To overcome the trade-off between terrain adaptability and mobility in traditional wheeled and legged robots, a wheeled bipedal robot was developed by leveraging the complementary strengths of legged and wheeled mechanisms. Based on the robot’s dynamic model, an LQR balance control algorithm was constructed to achieve stable balance during in-place standing and walking. Considering the influence of measurement noise and to reduce controller complexity, the EKF was incorporated to smooth the LQR control torque. The resulting KLQR algorithm significantly enhances both the smoothness and robustness of the robot’s motion.
- 2.
- To validate the effectiveness of the proposed KLQR algorithm in reducing noise impact and improving stability, an experimental platform was built using the wheeled bipedal robot, an IMU sensing system, and an industrial PC with a real-time control module. Comparative filtering experiments demonstrated that the integrated EKF effectively suppresses torque spikes. In-place balance tests showed that the KLQR algorithm reduces oscillations by approximately threefold compared with the baseline LQR controller, thereby improving convergence and robustness. Additionally, six experiments involving uniform-speed linear walking and turning at various velocities confirmed that the KLQR algorithm ensures stable locomotion with minimal fluctuation, without noticeable walking deviation or abrupt acceleration and deceleration.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Y.; Chai, X.; Gao, F.; Qi, C.K. Obstacle avoidance and motion planning scheme for a hexapod robot Octopus-III. Robot. Auton. Syst. 2018, 103, 199–212. [Google Scholar] [CrossRef]
- Shi, Q.; Gao, J.; Wang, S.; Quan, X.; Jia, G.; Huang, Q.; Fukuda, T. Development of a Small-Sized Quadruped Robotic Rat Capable of Multimodal Motions. IEEE Trans. Robot. 2022, 38, 3027–3043. [Google Scholar] [CrossRef]
- Du, W.; Fnadi, M.; Benamar, F. Rolling based locomotion on rough terrain for a wheeled quadruped using centroidal dynamics. Mech. Mach. Theory 2020, 153, 103984. [Google Scholar] [CrossRef]
- Kim, K.; Spieler, P.; Lupu, E.S.; Ramezani, A.; Chung, S.J. A bipedal walking robot that can fly, slackline, and skateboard. Sci. Robot. 2021, 6, eabf8136. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Wang, W.; Li, Y.; Zhang, Q. Design and Implementation of a Two-Wheel and Hopping Robot with a Linkage Mechanism. IEEE Access 2018, 6, 42422–42430. [Google Scholar] [CrossRef]
- Zhu, M.; Zhang, T.; Zou, Y. Imitation-constrained evolutionary learning for multi-locomotion skill of bipedal wheeled robots in unstructured terrains. Eng. Appl. Artif. Intell. 2025, 106, 112079. [Google Scholar] [CrossRef]
- Yang, J.; Wu, Q.; Li, S.; Ye, Y.; Luo, C. Integrated Modeling and Control Optimization of Biped Wheel-Legged Robot. IEEE Robot. Autom. Lett. 2025, 10, 1465–1472. [Google Scholar] [CrossRef]
- Miki, T.; Lee, J.; Hwangbo, J.; Wellhausen, L.; Koltun, V.; Hutter, M. Learning robust perceptive locomotion for quadrupedal robots in the wild. Sci. Robot. 2022, 7, eabk2822. [Google Scholar] [CrossRef] [PubMed]
- Nygaard, T.F.; Martin, C.P.; Torresen, J.; Glette, K.; Howard, D. Real-world embodied AI through a morphologically adaptive quadruped robot. Nat. Mach. Intell. 2021, 3, 410–419. [Google Scholar] [CrossRef]
- Klemm, V.; Morra, A.; Salzmann, C.; Tschopp, F.; Bodie, K.; Gulich, L.; Küng, N.; Mannhart, D.; Pfister, C.; Vierneisel, M.; et al. Ascento: A Two-Wheeled Jumping Robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Zhang, H.; Mohamad Nor, N. Control strategies for two-wheeled self-balancing robotic systems: A comprehensive review. Robotics 2025, 14, 101. [Google Scholar] [CrossRef]
- Klemm, V.; Morra, A.; Gulich, L.; Mannhart, D.; Rohr, D.; Kamel, M.; Siegwart, R. LQR-assisted whole-body control of a wheeled bipedal robot with kinematic loops. IEEE Robot. Autom. Lett. 2020, 5, 3745–3752. [Google Scholar] [CrossRef]
- Raza, F.; Owaki, D.; Hayashibe, M. Modeling and Control of a Hybrid Wheeled Legged Robot: Disturbance Analysis. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020. [Google Scholar]
- Wang, S.; Cui, L.L.; Zhang, J.F.; Lai, J.; Zhang, D.; Chen, K.; Zheng, Y.; Zhang, Z.; Jiang, Z.P. Balance Control of a Novel Wheel-legged Robot: Design and Experiments. In Proceedings of the IEEE International Conference on and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Zhang, J.; Li, Z.; Wang, S.; Dai, Y.; Zhang, R.; Lai, J.; Hu, J.; Gao, W.; Tang, J.; Zheng, Y. Adaptive optimal output regulation for wheel-legged robot Ollie: A data-driven approach. Front. Neurorobotics 2023, 16, 1102259. [Google Scholar] [CrossRef]
- Cao, H.X.; Lu, B.; Liu, H.W.; Liu, R.; Guo, X. Modeling and MPC-based balance control for a wheeled bipedal robot. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 420–425. [Google Scholar]
- Kim, S.-K.; Ahn, C.K.; Agarwal, R.K. Observer-Based Proportional-Type Controller for Two-Wheeled Mobile Robots via Simple Coordinate Transformation Technique. IEEE Trans. Veh. Technol. 2021, 70, 11458–11468. [Google Scholar] [CrossRef]
- Qian, Q.W.; Wu, J.F.; Wang, Z. Dynamic balance control of two-wheeled self-balancing pendulum robot based on adaptive machine learning. Int. J. Wavelets Multiresolution Inf. Process. 2020, 18, 1941002. [Google Scholar] [CrossRef]
- Xin, Y.X.; Chai, H.; Li, Y.B.; Rong, X.; Li, B.; Li, Y. Speed and Acceleration Control for a Two Wheel-Leg Robot Based on Distributed Dynamic Model and Whole-Body Control. IEEE Access 2019, 7, 180630–180639. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, Z.; Han, L.; Chen, X.; Qiu, X.; Huang, Q. Compliant Motion Control of Wheel-Legged Humanoid Robot on Rough Terrains. IEEE/ASME Trans. Mechatron. 2024, 29, 1949–1959. [Google Scholar] [CrossRef]
- Feng, X.; Liu, S.; Yuan, Q.; Xiao, J.; Zhao, D. Research on wheel-legged robot based on LQR and ADRC. Sci. Rep. 2023, 13, 15122. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Z.; Lu, C. Design and Control of a Wheeled Bipedal Robot Based on Hybrid Linear Quadratic Regulator and Proportional-Derivative Control. Sensors 2025, 25, 5398. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Xin, Y.; Rong, X.W.; Li, Y. Whole-body Motion Planning and Control for Underactuated Wheeled-bipdal Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO), Sanya, China, 27–31 December 2021. [Google Scholar]
- Li, X.; Zhou, H.T.; Feng, H.B.; Zhang, S.; Fu, Y. Design and Experiments of a Novel Hydraulic Wheel-legged Robot (WLR). In Proceedings of the 25th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Cui, L.L.; Wang, S.; Zhang, J.F.; Zhang, D.; Lai, J.; Zheng, Y.; Zhang, Z.; Jiang, Z.P. Learning-Based Balance Control of Wheel-Legged Robots. IEEE Robot. Autom. Lett. 2021, 6, 7667–7674. [Google Scholar] [CrossRef]
- Xin, Y.X.; Rong, X.; Li, Y.B.; Li, B.; Chai, H. Movements and Balance Control of a Wheel-Leg Robot Based on Uncertainty and Disturbance Estimation Method. IEEE Access 2019, 7, 133265–133273. [Google Scholar] [CrossRef]
- Khan, J.; Lee, E.; Kim, K. Optimizing the Performance of Kalman Filter and Alpha-Beta Filter Algorithms through Neural Network. In Proceedings of the 2023 9th International Conference on Control, Decision and Information Technologies (CoDIT), Rome, Italy, 3–6 July 2023; pp. 2187–2192. [Google Scholar]
- Baklouti, S.; Rezgui, T.; Chaouch, A.; Chaker, A.; Mefteh, S.; Sahbani, A.; Bennour, S. IMU Based Serial Manipulator Joint Angle Monitoring: Comparison of Complementary and Double Stage Kalman Filter Data Fusion. In International Conference Design and Modeling of Mechanical Systems; Walha, L., Jarraya, A., Djemal, F., Chouchane, M., Aifaoui, N., Chaari, F., Abdennadher, M., Benamara, A., Haddar, M., Eds.; Lecture Notes in Mechanical Engineering; Springer: Cham, Switzerland, 2023. [Google Scholar]
- Bai, Y.; Yan, B.; Zhou, C.; Su, T.; Jin, X. State of art on state estimation: Kalman filter driven by machine learning. Annu. Rev. Control. 2023, 56, 100909. [Google Scholar] [CrossRef]
- Sun, F.; Yu, Z.; Yang, H. A design for two-wheeled self-balancing robot based on Kalman filter and LQR. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 612–616. [Google Scholar]
- Laddach, K.; Łangowski, R.; Zubowicz, T. Estimation of the angular position of a two-wheeled balancing robot using a real IMU with selected filters. Bull. Pol. Acadamy Sci. Tech. Sci. 2022, 70, 1–16. [Google Scholar] [CrossRef]
- Srichandan, A.; Dhingra, J.; Hota, M.K. An Improved Q-learning Approach with Kalman Filter for Self-balancing Robot Using OpenAI. J. Control. Autom. Electr. Syst. 2021, 32, 1521–1530. [Google Scholar] [CrossRef]
- Choudhry, O.A.; Wasim, M.; Ali, A.; Choudhry, M.A.; Iqbal, J. Modelling and robust controller design for an underactuated self-balancing robot with uncertain parameter estimation. PLoS ONE 2023, 18, e0285495. [Google Scholar] [CrossRef] [PubMed]
- Herrera, M.; Benítez, D.S.; Aguirre, O.; Camacho, O. Experimental Validation of Fuzzy-Optimal Control for a Two-Wheeled Inverted Pendulum. In Proceedings of the 2023 IEEE Seventh Ecuador Technical Chapters Meeting (ECTM), Ambato, Ecuador, 10–13 October 2023; pp. 1–6. [Google Scholar]
- Irfan, S.; Zhao, L.; Ullah, S.; Mehmood, A.; Fasih Uddin Butt, M. Control strategies for inverted pendulum: A comparative analysis of linear, nonlinear, and artificial intelligence approaches. PLoS ONE 2024, 19, e0298093. [Google Scholar] [CrossRef]
- Cui, Z.; Dai, J.; Sun, J.; Li, D.; Wang, L.; Wang, K. Hybrid Methods Using Neural Network and Kalman Filter for the State of Charge Estimation of Lithium-Ion Battery. Math. Probl. Eng. 2022, 2022, 9616124. [Google Scholar] [CrossRef]
- Zhang, A.; Zhou, R.; Zhang, T.; Zheng, J.; Chen, S. Balance Control Method for Bipedal Wheel-Legged Robots Based on Friction Feedforward Linear Quadratic Regulator. Sensors 2025, 25, 1056. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Li, D.; Zou, Y. A robust balance controller of a two-wheeled legged robot based on adaptive neuro-fuzzy inference system. J. Braz. Soc. Mech. Sci. Eng. 2025, 47, 665. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameters | Value |
|---|---|
| m | 0.895 kg |
| M | 10.914 kg |
| 257.18 mm | |
| 102.5 mm | |
| 0.0031 kg × | |
| 0.3998 kg × | |
| 0.5277 kg × |
| Motor Name | Motor Model | Gear Rate | Max Torque (Nm) | Max Velocity (r/min) |
|---|---|---|---|---|
| Hip motor | HT8115-J9 | 9:1 | 75 | 57 |
| Knee motor | HT8115-J9 | 9:1 | 75 | 57 |
| Hub motor | MF9025v2 | 4.9 | 496 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.
Share and Cite
Zhou, R.; Guan, Y.; Zhang, T.; Chen, S.; Zheng, J.; Zhou, X. Extended Kalman Filter-Enhanced LQR for Balance Control of Wheeled Bipedal Robots. Machines 2026, 14, 77. https://doi.org/10.3390/machines14010077
Zhou R, Guan Y, Zhang T, Chen S, Zheng J, Zhou X. Extended Kalman Filter-Enhanced LQR for Balance Control of Wheeled Bipedal Robots. Machines. 2026; 14(1):77. https://doi.org/10.3390/machines14010077
Chicago/Turabian StyleZhou, Renyi, Yisheng Guan, Tie Zhang, Shouyan Chen, Jingfu Zheng, and Xingyu Zhou. 2026. "Extended Kalman Filter-Enhanced LQR for Balance Control of Wheeled Bipedal Robots" Machines 14, no. 1: 77. https://doi.org/10.3390/machines14010077
APA StyleZhou, R., Guan, Y., Zhang, T., Chen, S., Zheng, J., & Zhou, X. (2026). Extended Kalman Filter-Enhanced LQR for Balance Control of Wheeled Bipedal Robots. Machines, 14(1), 77. https://doi.org/10.3390/machines14010077