
The Design and Control of a Footplate-Based Gait Robo-Assisted System for Lower Limb Actuator



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
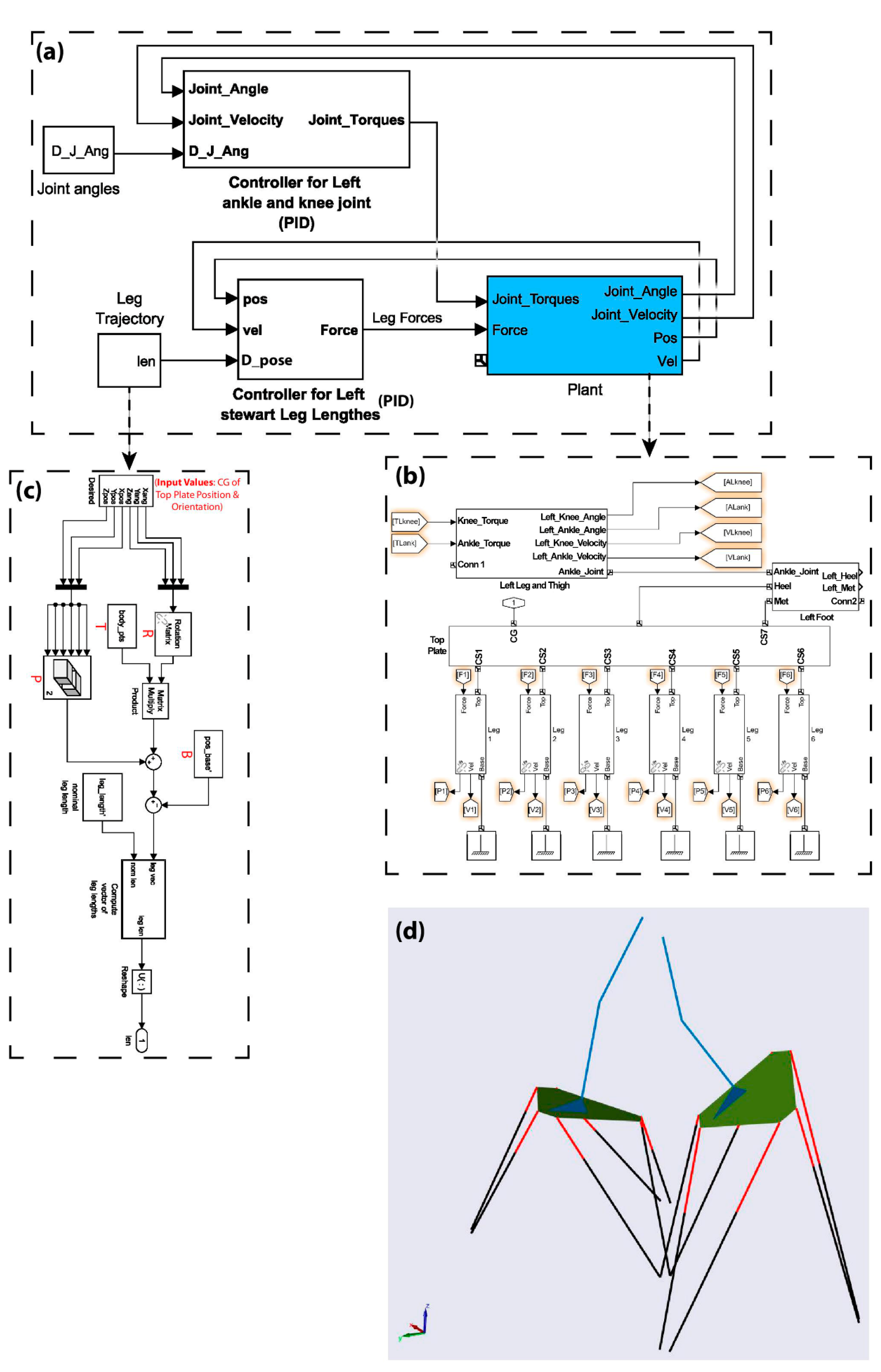
2.1. Mechanical Model of the System
2.2. Control Model of the System
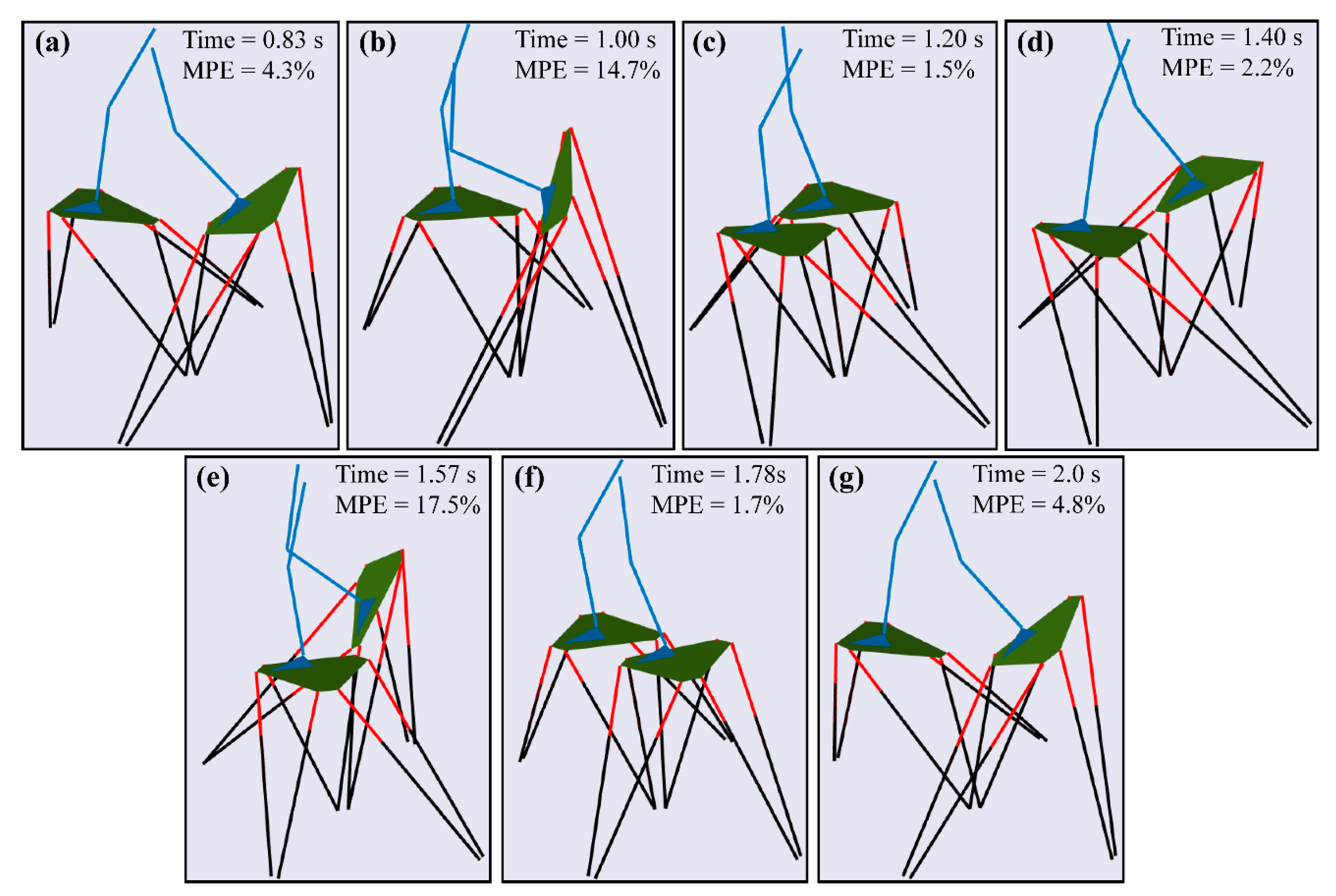
2.3. Implementation of Gait Intervention in the System
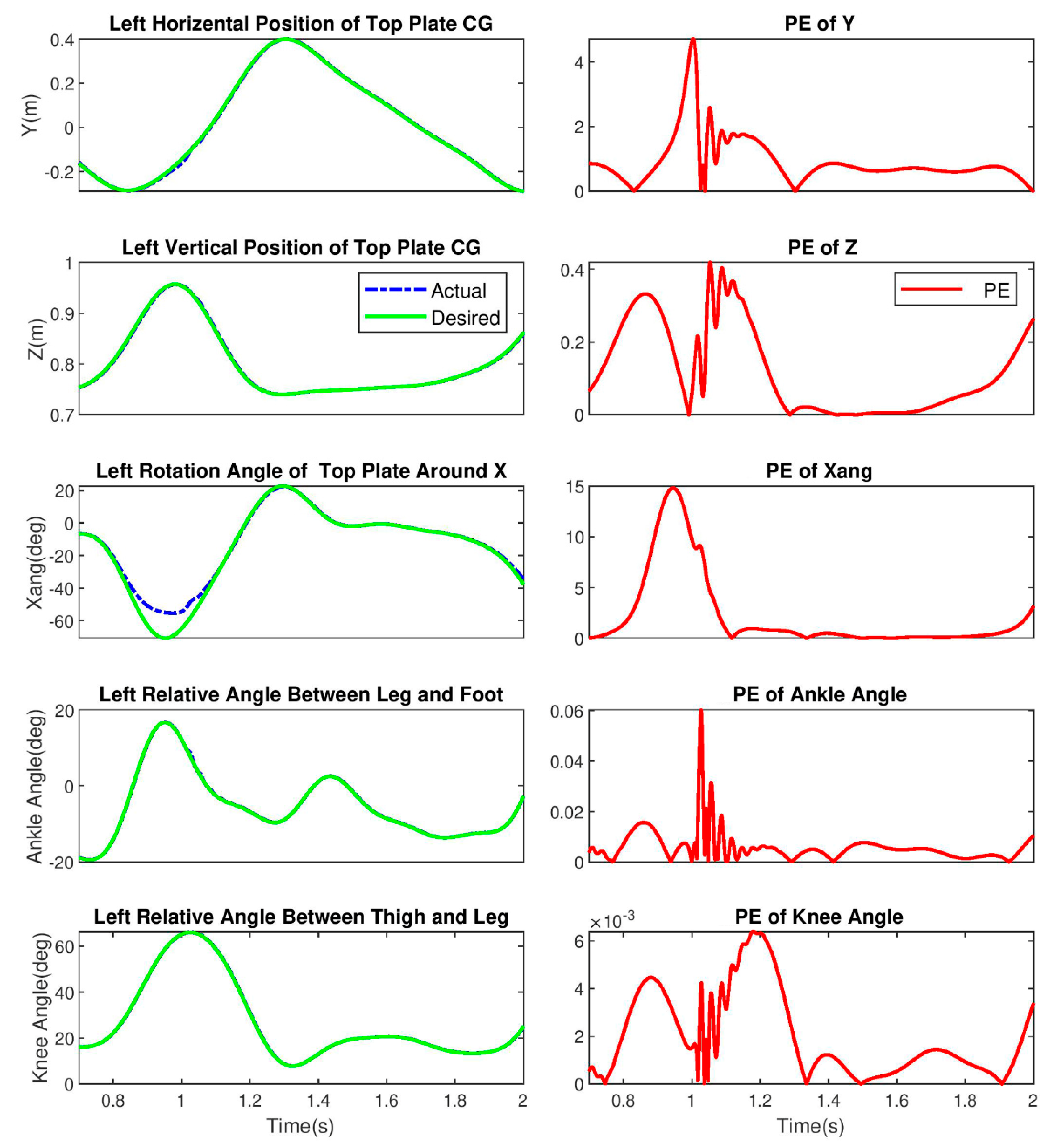
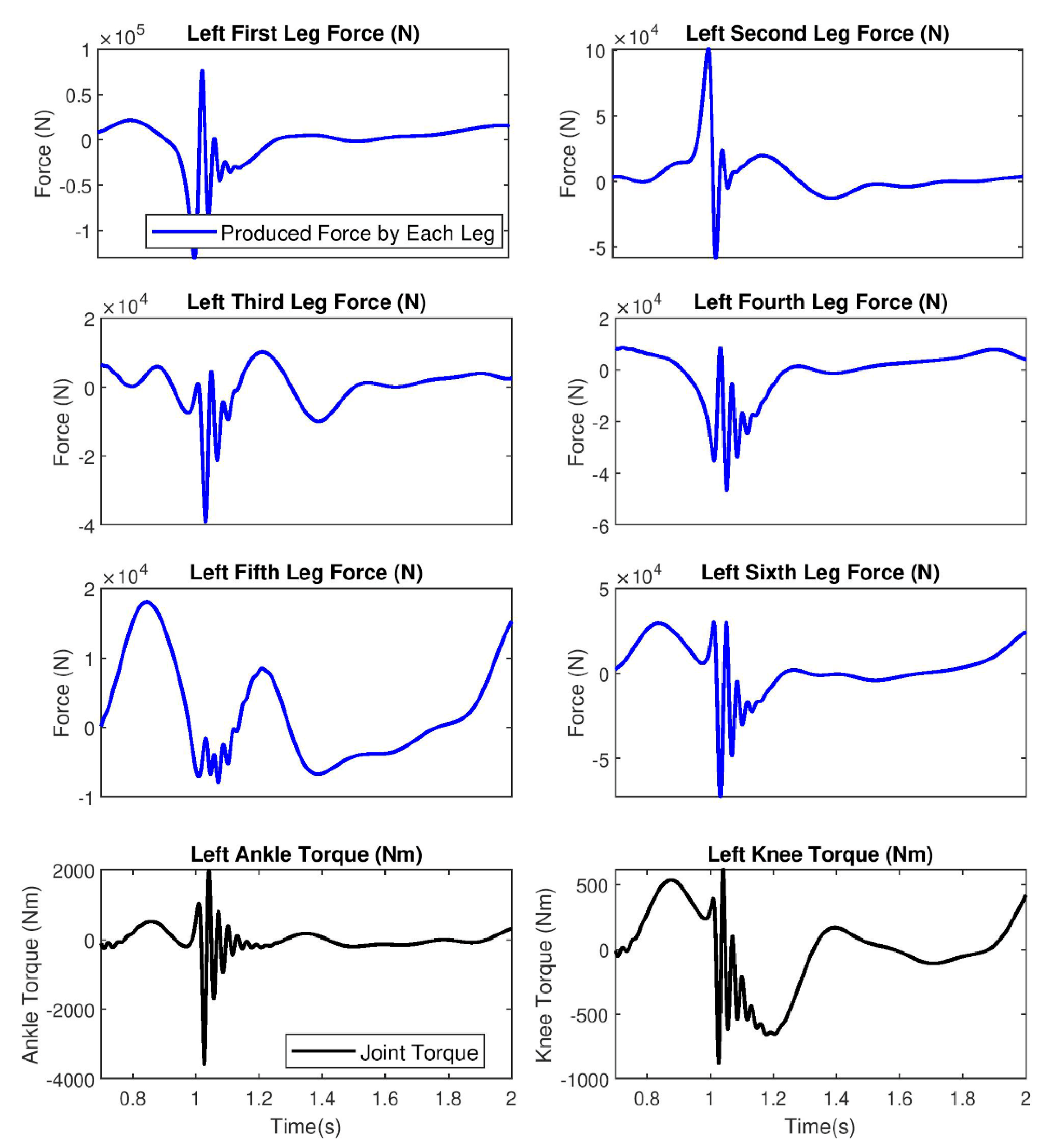
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Doherty, D.L. Stroke/head Injury: A Guide to Functional Outcomes in Physical Therapy Management; Lippincott Williams & Wilkins (LWW): Philadelphia, PA, USA, 1988. [Google Scholar]
- Lubkin, I.M.; Larsen, P.D. Chronic Illness: Impact and Interventions; Jones & Bartlett Learning: Burlington, MA, USA, 2006. [Google Scholar]
- Kubo, K.; Miyoshi, T.; Kanai, A.; Terashima, K. Gait rehabilitation device in central nervous system disease: A review. J. Robot. 2011, 2011, 348207. [Google Scholar] [CrossRef] [Green Version]
- Lawrence, E.S.; Coshall, C.; Dundas, R.; Stewart, J.; Rudd, A.G.; Howard, R.; Wolfe, C.D. Estimates of the prevalence of acute stroke impairments and disability in a multiethnic population. Stroke 2001, 32, 1279–1284. [Google Scholar] [CrossRef] [Green Version]
- Mekki, M.; Delgado, A.D.; Fry, A.; Putrino, D.; Huang, V. Robotic rehabilitation and spinal cord injury: A narrative review. Neurotherapeutics 2018, 15, 604–617. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morone, G.; Paolucci, S.; Cherubini, A.; De Angelis, D.; Venturiero, V.; Coiro, P.; Iosa, M. Robot-assisted gait training for stroke patients: Current state of the art and perspectives of robotics. Neuropsychiatr. Dis. Treat. 2017, 13, 1303. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, W.; Liu, Q.; Zhou, Z.; Ai, Q.; Sheng, B.; Xie, S.S. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics 2015, 31, 132–145. [Google Scholar] [CrossRef]
- Takeuchi, N.; Izumi, S.-I. Rehabilitation with poststroke motor recovery: A review with a focus on neural plasticity. Stroke Res. Treat. 2013, 2013, 128641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bragoni, M.; Broccoli, M.; Iosa, M.; Morone, G.; De Angelis, D.; Venturiero, V.; Coiro, P.; Pratesi, L.; Mezzetti, G.; Fusco, A. Influence of psychologic features on rehabilitation outcomes in patients with subacute stroke trained with robotic-aided walking therapy. Am. J. Phys. Med. Rehabil. 2013, 92, e16–e25. [Google Scholar] [CrossRef] [PubMed]
- Belda-Lois, J.-M.; Mena-del Horno, S.; Bermejo-Bosch, I.; Moreno, J.C.; Pons, J.L.; Farina, D.; Iosa, M.; Molinari, M.; Tamburella, F.; Ramos, A. Rehabilitation of gait after stroke: A review towards a top-down approach. J. Neuroeng. Rehabil. 2011, 8, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-limb robotic rehabilitation: Literature review and challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef]
- Koceska, N.; Koceski, S. Robot devices for gait rehabilitation. Int. J. Comput. Appl. 2013, 62, 1–8. [Google Scholar]
- Rastegarpanah, A.; Saadat, M.; Borboni, A.; Stolkin, R. Application of a parallel robot in lower limb rehabilitation: A brief capability study. In Proceedings of the 2016 International Conference on Robotics and Automation for Humanitarian Applications (RAHA), Amritapuri, India, 18–20 December 2016; pp. 1–6. [Google Scholar]
- Mayr, A.; Kofler, M.; Quirbach, E.; Matzak, H.; Fröhlich, K.; Saltuari, L. Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehabil. Neural Repair 2007, 21, 307–314. [Google Scholar] [CrossRef] [PubMed]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef]
- Pérez Vidal, A.F.; Rumbo Morales, J.Y.; Ortiz Torres, G.; Sorcia Vázquez, F.d.J.; Cruz Rojas, A.; Brizuela Mendoza, J.A.; Rodríguez Cerda, J.C. Soft exoskeletons: Development, requirements, and challenges of the last decade. Actuators 2021, 10, 166. [Google Scholar] [CrossRef]
- Duschau-Wicke, A.; Caprez, A.; Riener, R. Patient-cooperative control increases active participation of individuals with SCI during robot-aided gait training. J. Neuroeng. Rehabil. 2010, 7, 43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kazerooni, H.; Steger, R.; Huang, L. Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX). Int. J. Robot. Res. 2006, 25, 561–573. [Google Scholar] [CrossRef]
- Veneman, J.F.; Kruidhof, R.; Hekman, E.E.; Ekkelenkamp, R.; Van Asseldonk, E.H.; Van Der Kooij, H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Girone, M.; Burdea, G.; Bouzit, M.; Popescu, V.; Deutsch, J.E. A Stewart platform-based system for ankle telerehabilitation. Auton. Robot. 2001, 10, 203–212. [Google Scholar] [CrossRef]
- Schmidt, H.; Krüger, J.; Hesse, S. HapticWalker—Haptic foot device for gait rehabilitation. In Human Haptic Perception: Basics and Applications; Springer: Berlin, Germany, 2008; pp. 501–511. [Google Scholar]
- Deutsch, J.E.; Latonio, J.; Burdea, G.C.; Boian, R. Post-stroke rehabilitation with the Rutgers Ankle System: A case study. Presence 2001, 10, 416–430. [Google Scholar] [CrossRef]
- Hesse, S.; Uhlenbrock, D. A mechanized gait trainer for restoration of gait. J. Rehabil. Res. Dev. 2000, 37, 701–708. [Google Scholar]
- Cheng, P.-Y.; Lai, P.-Y. Comparison of exoskeleton robots and end-effector robots on training methods and gait biomechanics. In Proceedings of the International Conference on Intelligent Robotics and Applications, Kuala, Lumpur, 5–7 November 2013; pp. 258–266. [Google Scholar]
- Bo, A.P.L.; Casas, L.; Cucho-Padin, G.; Hayashibe, M.; Elias, D. Control Strategies for Gait Tele-Rehabilitation System Based on Parallel Robotics. Appl. Sci. 2021, 11, 11095. [Google Scholar] [CrossRef]
- de Sousa, A.C.C.; Bó, A.P. Simulation studies on hybrid neuroprosthesis control strategies for gait at low speeds. Biomed. Signal Process. Control 2021, 70, 102970. [Google Scholar] [CrossRef]
- Schmidt, H.; Hesse, S.; Bernhardt, R.; Krüger, J. HapticWalker—A novel haptic foot device. ACM Trans. Appl. Percept. 2005, 2, 166–180. [Google Scholar] [CrossRef]
- Jezernik, S.; Colombo, G.; Keller, T.; Frueh, H.; Morari, M. Robotic orthosis lokomat: A rehabilitation and research tool. Neuromodulation 2003, 6, 108–115. [Google Scholar] [CrossRef]
- Hesse, S.; Uhlenbrock, D.; Werner, C.; Bardeleben, A. A mechanized gait trainer for restoring gait in nonambulatory subjects. Arch. Phys. Med. Rehabil. 2000, 81, 1158–1161. [Google Scholar] [CrossRef] [PubMed]
- Hornby, T.G.; Campbell, D.D.; Kahn, J.H.; Demott, T.; Moore, J.L.; Roth, H.R. Enhanced gait-related improvements after therapist- versus robotic-assisted locomotor training in subjects with chronic stroke: A randomized controlled study. Stroke 2008, 39, 1786–1792. [Google Scholar] [CrossRef]
- Kim, J.; Park, H.-S.; Damiano, D.L. An interactive treadmill under a novel control scheme for simulating overground walking by reducing anomalous force. IEEE/ASME Trans. Mechatron. 2014, 20, 1491–1496. [Google Scholar] [CrossRef]
- Hernandez, E.; Warhmund, C.; Lamoureux, K.; Lee, E.; Sanchez, I.; Matthews, W.; Jafari, A. A novel treadmill that can bilaterally adjust the vertical surface stiffness. IEEE/ASME Trans. Mechatron. 2018, 23, 2338–2346. [Google Scholar] [CrossRef]
- Fichter, E.F. A Stewart platform-based manipulator: General theory and practical construction. Int. J. Robot. Res. 1986, 5, 157–182. [Google Scholar] [CrossRef]
- Chang, S.; Kim, J.; Kim, I.; Borm, J.H.; Lee, C.; Park, J.O. KIST teleoperation system for humanoid robot. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), Kyongju, Korea, 17–21 October 1999; pp. 1198–1203. [Google Scholar]
- Sefrioui, J.; Gosselin, C.M. On the quadratic nature of the singularity curves of planar three-degree-of-freedom parallel manipulators. Mech. Mach. Theory 1995, 30, 533–551. [Google Scholar] [CrossRef]
- Smith, N.; Wendlandt, J. Creating a Stewart Platform Model Using SimMechanics. MATLAB Dig. 2002, 10, 11–21. [Google Scholar]
- Muramatsu, N.; Akiyama, H. Japan: Super-aging society preparing for the future. Gerontologist 2011, 51, 425–432. [Google Scholar] [CrossRef] [PubMed]
- Rahmati, S.M.A.; Rostami, M.; Karimi, A. A novel optimization framework to improve the computational cost of muscle activation prediction for a neuromusculoskeletal system. Neural Comput. 2019, 31, 574–595. [Google Scholar] [CrossRef] [PubMed]
- Tanev, T.K. Kinematics of a hybrid (parallel–serial) robot manipulator. Mech. Mach. Theory 2000, 35, 1183–1196. [Google Scholar] [CrossRef]
- Chu, A.M.; Nguyen, C.D.; Vu, M.H.; Duong, X.B.; Nguyen, T.A.; Le, C.H. Kinematic and Dynamic Modelling for a Class of Hybrid Robots Composed of m Local Closed-Loop Linkages Appended to an n-Link Serial Manipulator. Appl. Sci. 2020, 10, 2567. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, O.; Khalil, W. Inverse and direct dynamic models of hybrid robots. Mech. Mach. Theory 2010, 45, 627–640. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahmati, S.M.; Karimi, A. The Design and Control of a Footplate-Based Gait Robo-Assisted System for Lower Limb Actuator. Machines 2022, 10, 546. https://doi.org/10.3390/machines10070546
Rahmati SM, Karimi A. The Design and Control of a Footplate-Based Gait Robo-Assisted System for Lower Limb Actuator. Machines. 2022; 10(7):546. https://doi.org/10.3390/machines10070546
Chicago/Turabian StyleRahmati, Seyed Mohammadali, and Alireza Karimi. 2022. "The Design and Control of a Footplate-Based Gait Robo-Assisted System for Lower Limb Actuator" Machines 10, no. 7: 546. https://doi.org/10.3390/machines10070546
APA StyleRahmati, S. M., & Karimi, A. (2022). The Design and Control of a Footplate-Based Gait Robo-Assisted System for Lower Limb Actuator. Machines, 10(7), 546. https://doi.org/10.3390/machines10070546