
Fault Detection for Interval Type-2 T-S Fuzzy Networked Systems via Event-Triggered Control



Abstract
:1. Introduction
- (1)
- A new FD fuzzy filter is designed by using IT2 T-S fuzzy model for generating a residual signal, which means that the designed FD filter premise variable could be different from NNSs.
- (2)
- A fault residual system is established by integrating the IT2 fuzzy theory, external disturbance, event-triggered scheme, time delays and parameter uncertainty.
- (3)
- The stability conditions and the existence conditions of the FD filter are derived by the form of linear matrix inequalities, as a result of the Lyapunov–Krasovskii generalized function method providing the basis. Matrix decoupling implements the transformation of the filter existence conditions with stability analysis.
2. Problem Formulation
2.1. IT2 T-S Nonlinear Networked Systems
2.2. Event-Triggered FD Filter
2.3. Fault Residual System (FRS)
- (1)
- When , the FRS (15) is considered to be asymptotically stable.
- (2)
- Under the condition of zero initial, contents , where bring about performance level.
2.4. FD Mechanism
- (1)
- ;
- (2)
- (3)
- .
3. Main Conclusion
3.1. Stability Analysis
3.2. Fault Diagnosis Filter Design
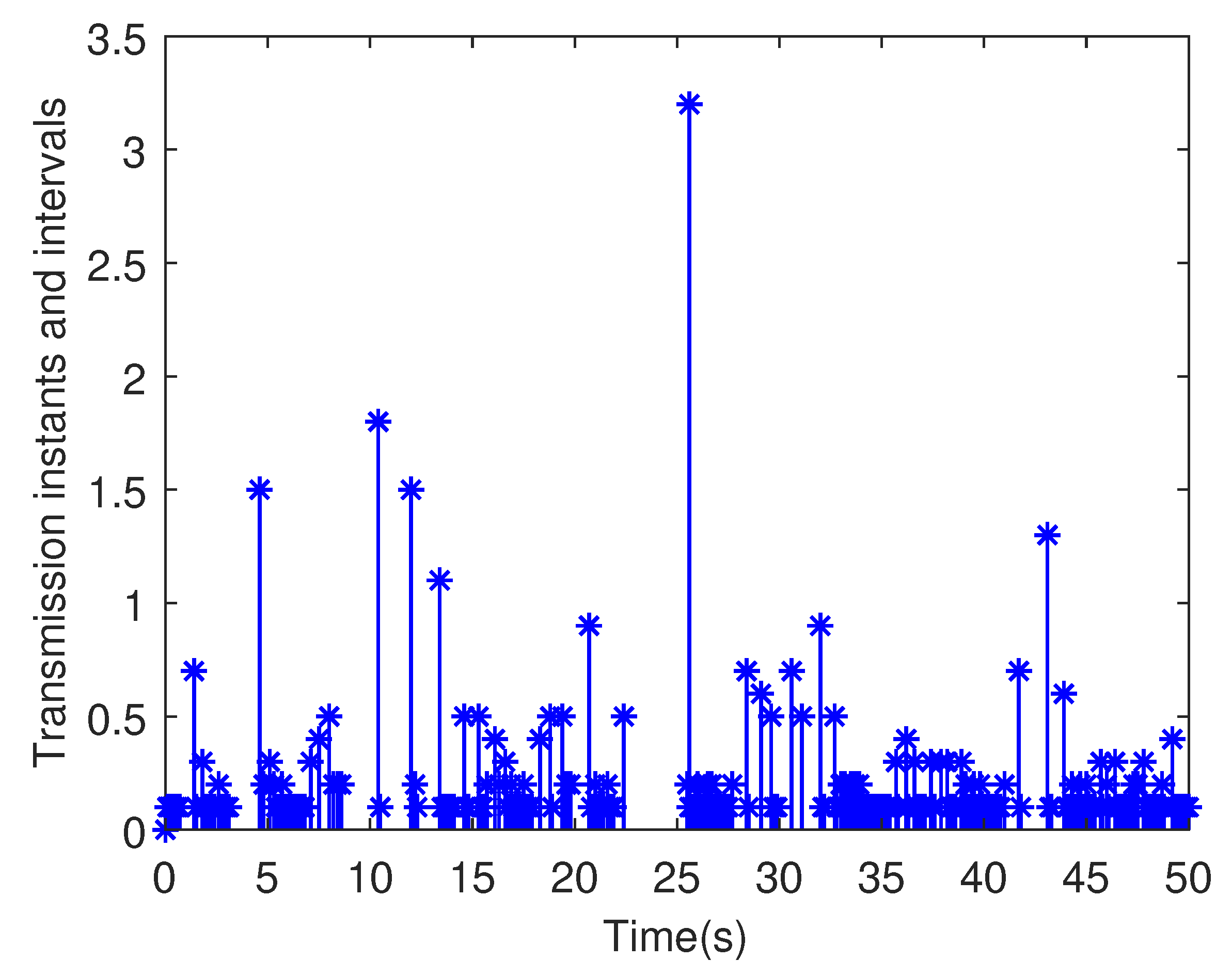
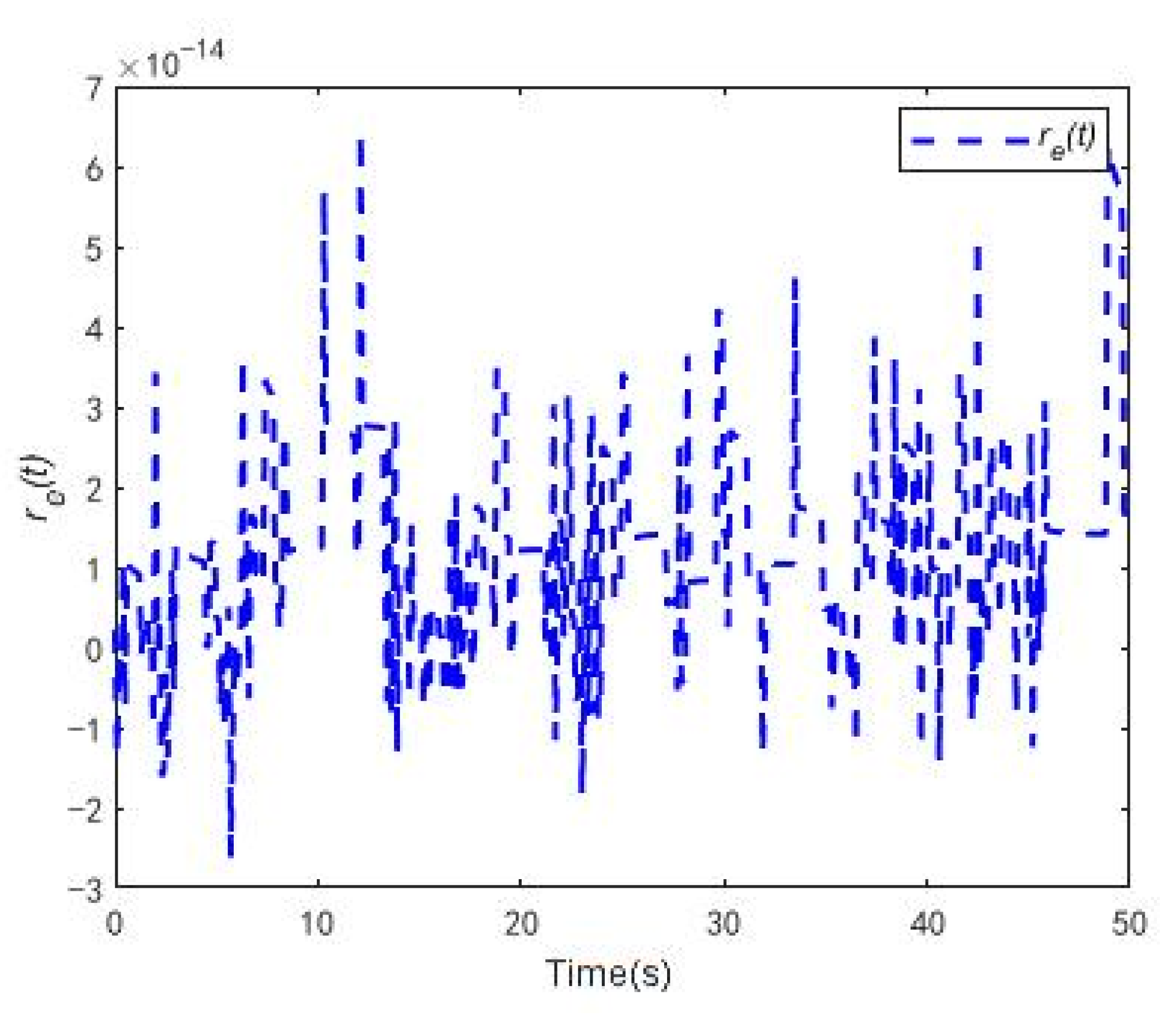
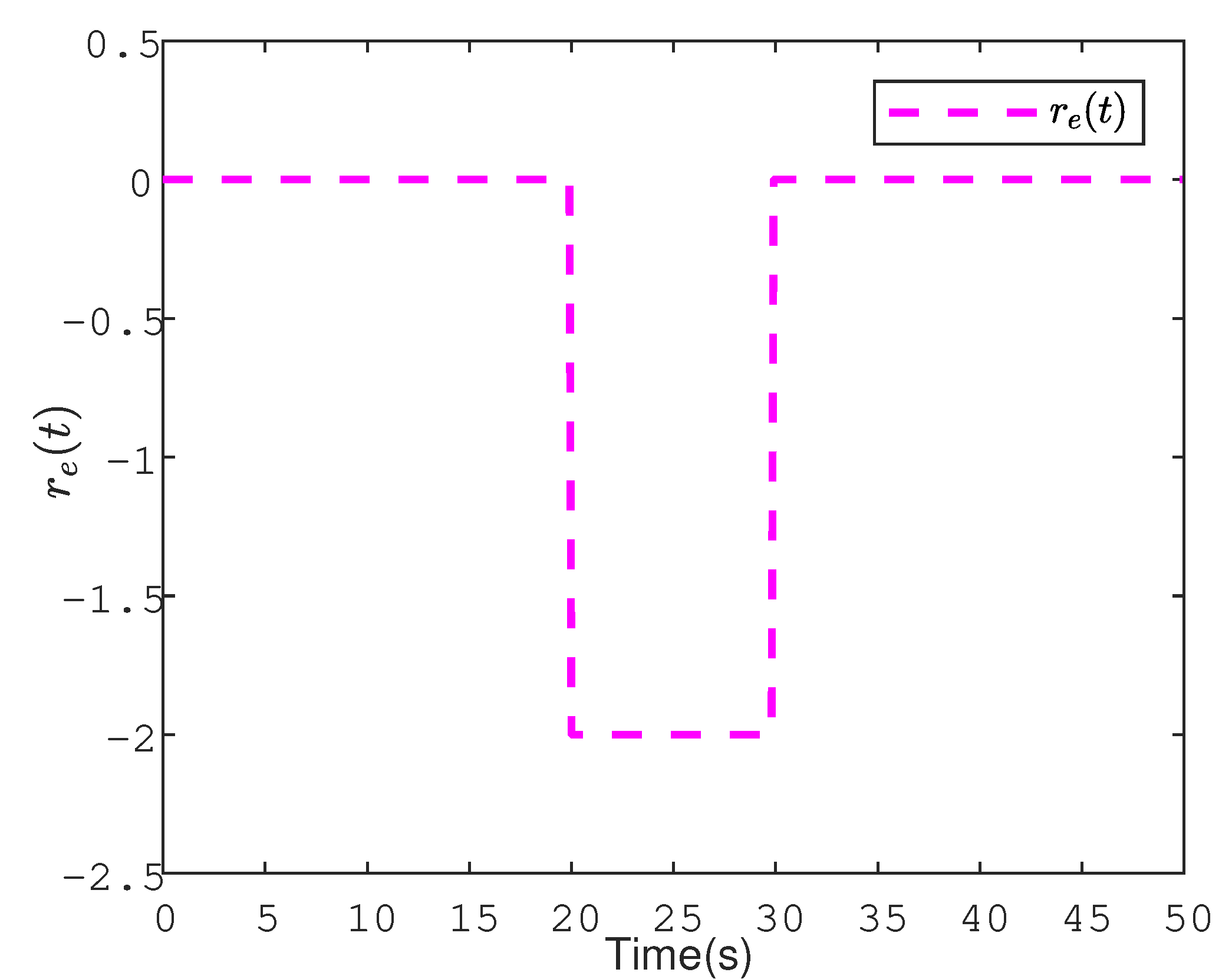
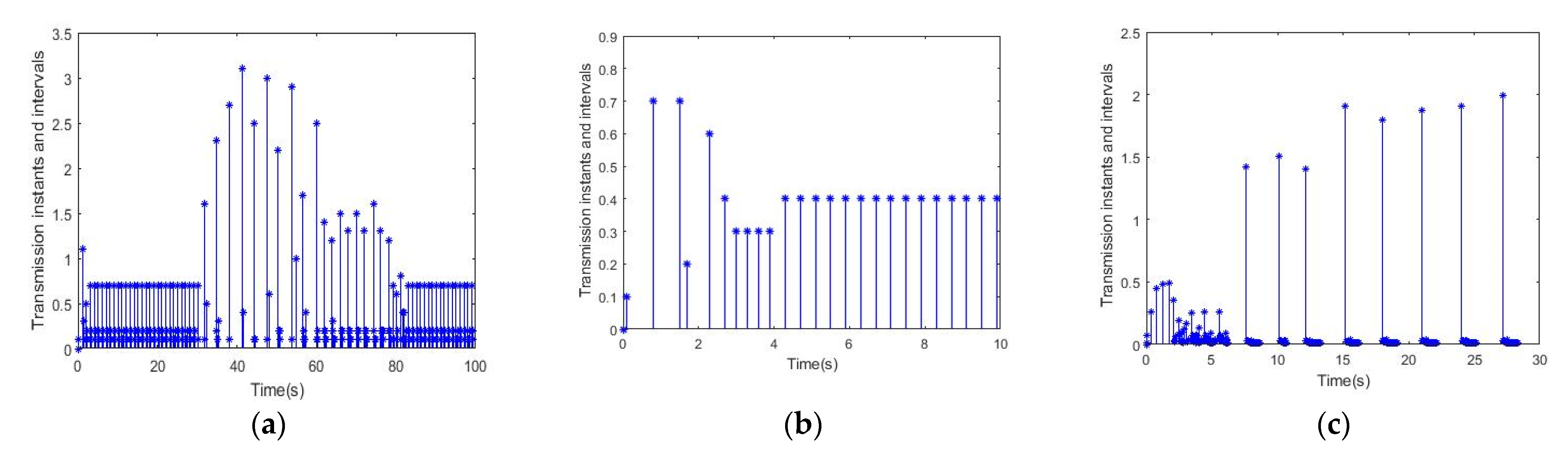
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Han, Q.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked Control Systems, A Survey of Trends and Techniques. IEEE/CAA J. Autom. Sinica 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, D. H∞ Fault Detection for Delta Operator Systems with Random Two-Channels Packet Losses and Limited Communication. IEEE Access 2019, 7, 94448–94459. [Google Scholar] [CrossRef]
- Liu, Y.; Arunkumar, A.; Sakthivel, R.; Nithya, V.; Alsaadi, F. Finite-time Event-Triggered Non-fragile control and Fault Detection for Switched Networked Systems with Random Packet Losses. J. Frankl. Inst. 2019, 357, 11394–11420. [Google Scholar] [CrossRef]
- Han, C.; Song, D.; Ran, G.; Yu, J. Event-Triggered Mixed Non-Fragile and Measurement Quantization Filtering Design for Interval Type-2 Fuzzy Systems. IEEE Access 2020, 9, 1533–1545. [Google Scholar] [CrossRef]
- Wang, X.; Fei, Z.; Wang, Z.; Yu, J. Zonotopic fault detection observer design for discrete-time systems with adaptively adjusted event-triggered mechanism. IET Control Theory Appl. 2020, 14, 96–104. [Google Scholar] [CrossRef]
- Ju, Y.; Tian, X.; Liu, H.; Ma, L. Fault detection of networked dynamical systems, a survey of trends and techniques. Int. J. Syst. Sci. 2021, 52, 3390–3409. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.; Alippi, C.; Huang, B.; Liu, D. Explainable Intelligent Fault Diagnosis for Nonlinear Dynamic Systems: From Unsupervised to Supervised Learning. TechRxiv 2022. [Google Scholar] [CrossRef]
- Sun, S.; Li, T.; Pang, Y.; Hua, X. Multiple delay-dependent event-triggered finite-time H∞ filtering for uncertain networked random systems against state and input constraints. Appl. Math. Comput. 2022, 415, 126711. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, H.; Huang, M. Neural network-based event-triggered fault detection of discrete-time nonlinear uncertain systems. J. Frankl. Inst. 2020, 357, 4887–4900. [Google Scholar] [CrossRef]
- Liu, M.; Yu, J.; Sun, Y.; Li, J. Adaptive event-triggered fault detection for Markovian jump systems with network time-delays. Trans. Inst. Meas. Control 2021, 43, 2934–2947. [Google Scholar] [CrossRef]
- Lu, Z.; Ran, G.; Xu, F.; Lu, J. Novel mixed-triggered filter design for interval type-2 fuzzy nonlinear Markovian jump systems with randomly occurring packet dropouts. Nonlinear Dyn. 2019, 97, 1525–1540. [Google Scholar] [CrossRef]
- Weidman, T. Comments on “Fuzzy-Model-Based Quantized Guaranteed Cost Control of Nonlinear Networked Systems”. IEEE Trans. Fuzzy Syst. 2018, 26, 1086–1088. [Google Scholar] [CrossRef]
- Guo, X.; Fan, X.; Wang, J.; Park, J. Event-triggered Switching-type Fault Detection and Isolation for Fuzzy Control Systems under DoS Attacks. IEEE Trans. Fuzzy Syst. 2020, 29, 3401–3414. [Google Scholar] [CrossRef]
- Liu, X.; Su, X.; Shi, P.; Nguang, S.; Shen, C. Fault detection filtering for nonlinear switched systems via event-triggered communication approach. Automatica 2019, 101, 365–376. [Google Scholar] [CrossRef]
- Qi, J.; Li, Y. Hybrid-triggered fault detection filter design for networked Takagi–Sugeno fuzzy systems subject to persistent heavy noise disturbance. Int. J. Adapt. Control Signal Process. 2021, 35, 1062–1082. [Google Scholar] [CrossRef]
- Yi, X.; Li, G.; Liu, Y.; Fang, F. Event-triggered H∞ filtering for nonlinear networked control systems via T-S fuzzy model approach. Neurocomoputing 2021, 448, 344–352. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, K.; Su, X.; Xue, F.; Shi, P. Event-Triggered Fuzzy Filtering for Networked Systems with Application to Sensor Fault Detection. IEEE Trans. Fuzzy Syst. 2021, 29, 1409–1422. [Google Scholar] [CrossRef]
- Ran, G.; Liu, J.; Li, C.; Chen, L.; Li, D. Event-Based Finite-Time Consensus Control of Second-Order Delayed Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 276–280. [Google Scholar] [CrossRef]
- Wan, X.; Han, T.; An, J.; Wu, M. Fault Diagnosis for Networked Switched Systems, An Improved Dynamic Event-Based Scheme. IEEE Trans. Cybern. 2021, 1–12. [Google Scholar] [CrossRef]
- Aslam, M.; Ullah, R.; Dai, X.; Sheng, A. Event-triggered scheme for fault detection and isolation of non-linear system with time-varying delay. IET Control Theory Appl. 2020, 14, 2429–2438. [Google Scholar] [CrossRef]
- Chen, Z.; Bao, Y.; Ma, Q.; Zhang, Z. Event-Based Control for Networked T-S Fuzzy Systems via Auxiliary Random Series Approach. IEEE Trans. Cybern. 2020, 50, 2166–2175. [Google Scholar] [CrossRef]
- Ran, G.; Liu, J.; Li, C.; Lam, H.; Li, D.; Chen, H. Fuzzy Model Based Asynchronous Fault Detection for Markov Jump Systems with Partially Unknown Transition Probabilities, An Adaptive Event-Triggered Approach. IEEE Trans. Fuzzy Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Li, R.; Yang, Y. Event-triggered fault detection for nonlinear descriptor networked control systems. J. Frankl. Inst. 2021, 358, 8715–8735. [Google Scholar] [CrossRef]
- Huang, C.; Shen, B.; Zou, L.; Shen, Y. Event-Triggering State and Fault Estimation for a Class of Nonlinear Systems Subject to Sensor Saturations. Sensors 2021, 21, 1242. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, B.; Zhang, Y.; Li, Y.; Zhang, Z. Event-triggered fault detection for T-S fuzzy systems subject to data losses. International. J. Syst. Sci. 2020, 51, 1162–1173. [Google Scholar] [CrossRef]
- Liu, Q.; Long, Y.; Ju, H.; Li, T. Neural network-based event-triggered fault detection for nonlinear Markov jump system with frequency specifications. Nonlinear Dyn. 2021, 103, 1–17. [Google Scholar] [CrossRef]
- Mishra, S.K.; Jha, A.V.; Verma, V.K.; Appasani, B.; Abdelaziz, A.Y.; Bizon, N. An Optimized Triggering Algorithm for Event-Triggered Control of Networked Control Systems. Mathematics 2021, 9, 1262. [Google Scholar] [CrossRef]
- Ning, Z.; Wang, T.; Song, X.; Yu, J. Fault detection of nonlinear stochastic systems via a dynamic event-triggered strategy. Signal Processing 2019, 167, 107283. [Google Scholar] [CrossRef]
- Xie, X.; Li, S.; Xu, B. Fault detection filter design for interval type-2 fuzzy systems under a novel adaptive event-triggering mechanism. Int. J. Syst. Sci. 2019, 50, 2510–2528. [Google Scholar] [CrossRef]
- Yang, H.; Wang, X.; Park, J. Sampled-Data-Based Dissipative Stabilization of IT-2 TSFSs Via Fuzzy Adaptive Event-Triggered Protocol. IEEE Trans. Cybern. 2021, 8, 1–10. [Google Scholar] [CrossRef]
- Guo, X.; Fan, X.; Ahn, C. Adaptive Event-Triggered Fault Detection for Interval Type-2 T-S Fuzzy Systems with Sensor Saturation. IEEE Trans. Fuzzy Syst. 2021, 29, 2310–2321. [Google Scholar] [CrossRef]
- Xie, X.; Li, S.; Xu, B. Adaptive event-triggered H∞ fuzzy filtering for interval type-2 T-S fuzzy-model-based networked control systems with asynchronously and imperfectly matched membership functions. J. Frankl. Inst.-Eng. Appl. Math. 2019, 356, 11760–11791. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, G. Event-Driven Fault Detection for Discrete-Time Interval Type-2 Fuzzy Systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 4959–4968. [Google Scholar] [CrossRef]
- Ran, G.; Li, C.; Lam, H.; Li, D.; Han, C. Event-Based Dissipative Control of Interval Type-2 Fuzzy Markov Jump Systems Under Sensor Saturation and Actuator Nonlinearity. IEEE Trans. Fuzzy Syst. 2022, 30, 714–727. [Google Scholar] [CrossRef]
- Rong, N.; Wang, Z. Event-Based Impulsive Control of IT2 T-S Fuzzy Interconnected System Under Deception Attacks. Int. J. Fuzzy Syst. 2021, 29, 1615–1628. [Google Scholar] [CrossRef]
- Ran, G.; Liu, J.; Li, D.; Zhang, Y.; Huang, Y. An Event-Triggered H∞ Filter for Interval Type-2 T–S Fuzzy Nonlinear Networked Systems with Parameter Uncertainties and Delays. Int. J. Fuzzy Syst. 2021, 23, 2144–2156. [Google Scholar] [CrossRef]
- Li, H.; Wu, L.; Lam, H.K.; Gao, Y. Analysis and Synthesis for Interval Type-2 Fuzzy-Model-Based Systems; Springer: Singapore, 2016. [Google Scholar]
- Zhou, J.; Cao, J.; Chen, J.; Hu, A.; Zhang, J.; Hu, M. Dynamic Event-Triggered Predictive Control for Interval Type-2 Fuzzy Systems with Imperfect Premise Matching. Entropy 2021, 23, 1452. [Google Scholar] [CrossRef]
- Ren, J.; Sun, J.; Fu, J. Finite-time event-triggered sliding mode control for one-sided Lipschitz nonlinear systems with uncertainties. Nonlinear Dyn. 2021, 103, 865–882. [Google Scholar] [CrossRef]
- Lam, H.; Seneviratne, L. Stability analysis of interval type-2 fuzzy-model-based control systems. IEEE Trans. Syst. Man Cybern. B Cybern. 2008, 38, 617–628. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Petersen, I.R. A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 1987, 8, 351–357. [Google Scholar] [CrossRef]
- Park, P.G.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 1:235–238. [Google Scholar] [CrossRef]
- He, Z. Research on Fault Detection Methods of Networked Control Systems with Mixed Delays; Northeast Petroleum University: Daqing, China, 2020; pp. 42–47. [Google Scholar]
- Gu, Z.; Yue, D.; Park, J.H.; Xie, X. Memory-Event-Triggered Fault Detection of Networked IT2 T-S Fuzzy Systems. IEEE Trans. Cybern. 2022, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Li, H.; Zhou, Q. Fault detection for interval type-2 fuzzy systems with sensor nonlinearities. Neurocomputing 2014, 145, 488–494. [Google Scholar] [CrossRef]
- Huang, S.; Yang, G. Fault Tolerant Controller Design for T–S Fuzzy Systems with Time-Varying Delay and Actuator Faults: A K-Step Fault-Estimation Approach. IEEE Trans. Fuzzy Syst. 2014, 22, 1526–1540. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Explanatory Notes |
|---|---|
| FD | fault diagnosis |
| IT2 | interval type-2 |
| T-S | Takagi–Sugeno |
| NNSs | nonlinear networked systems |
| FRS | Fault Residual System |
| LMIs | Linear matrix inequalities |
| ZOH | Zero-order hold |
| n-dimensional Euclidean space | |
| The inverse of matrix | |
| Transpose of matrix | |
| Negative (semi-negative)-definite matrix | |
| Positive (semi-positive)-definite matrix | |
| Diagonal matrix of and | |
| Symmetric term in the matrix | |
| Euclidean norm | |
| The space of square summable infinite vector sequences |
| The Upper Membership Function | The Lower Membership Function |
|---|---|
| System Parameters | Fault Signal | Trigger Mechanism | Comparison of Trigger Rate | Comparison of Detection Time | ||
|---|---|---|---|---|---|---|
| (Triggering Times) | ||||||
| Exp a [44] | cycle trigger | 100% | 23.9% | 0.5 s | 0.3 s | |
| (1000) | (239) | |||||
| Exp b [45] | adaptive Trigger | 31% | 26% | 0.19 s | 0.13 s | |
| (31) | (26) | |||||
| Exp c [47] | cycle trigger | 100% | 26.3% | * | 0.6 s | |
| 3000 | 789 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Zhang, C.; Xu, F.; Wang, Z.; Wang, L. Fault Detection for Interval Type-2 T-S Fuzzy Networked Systems via Event-Triggered Control. Machines 2022, 10, 347. https://doi.org/10.3390/machines10050347
Lu Z, Zhang C, Xu F, Wang Z, Wang L. Fault Detection for Interval Type-2 T-S Fuzzy Networked Systems via Event-Triggered Control. Machines. 2022; 10(5):347. https://doi.org/10.3390/machines10050347
Chicago/Turabian StyleLu, Zhongda, Chunda Zhang, Fengxia Xu, Zifei Wang, and Lijing Wang. 2022. "Fault Detection for Interval Type-2 T-S Fuzzy Networked Systems via Event-Triggered Control" Machines 10, no. 5: 347. https://doi.org/10.3390/machines10050347
APA StyleLu, Z., Zhang, C., Xu, F., Wang, Z., & Wang, L. (2022). Fault Detection for Interval Type-2 T-S Fuzzy Networked Systems via Event-Triggered Control. Machines, 10(5), 347. https://doi.org/10.3390/machines10050347