
Depth Control of an Oil Bladder Type Deep-Sea AUV Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control


Abstract
:1. Introduction
2. Dynamic Models
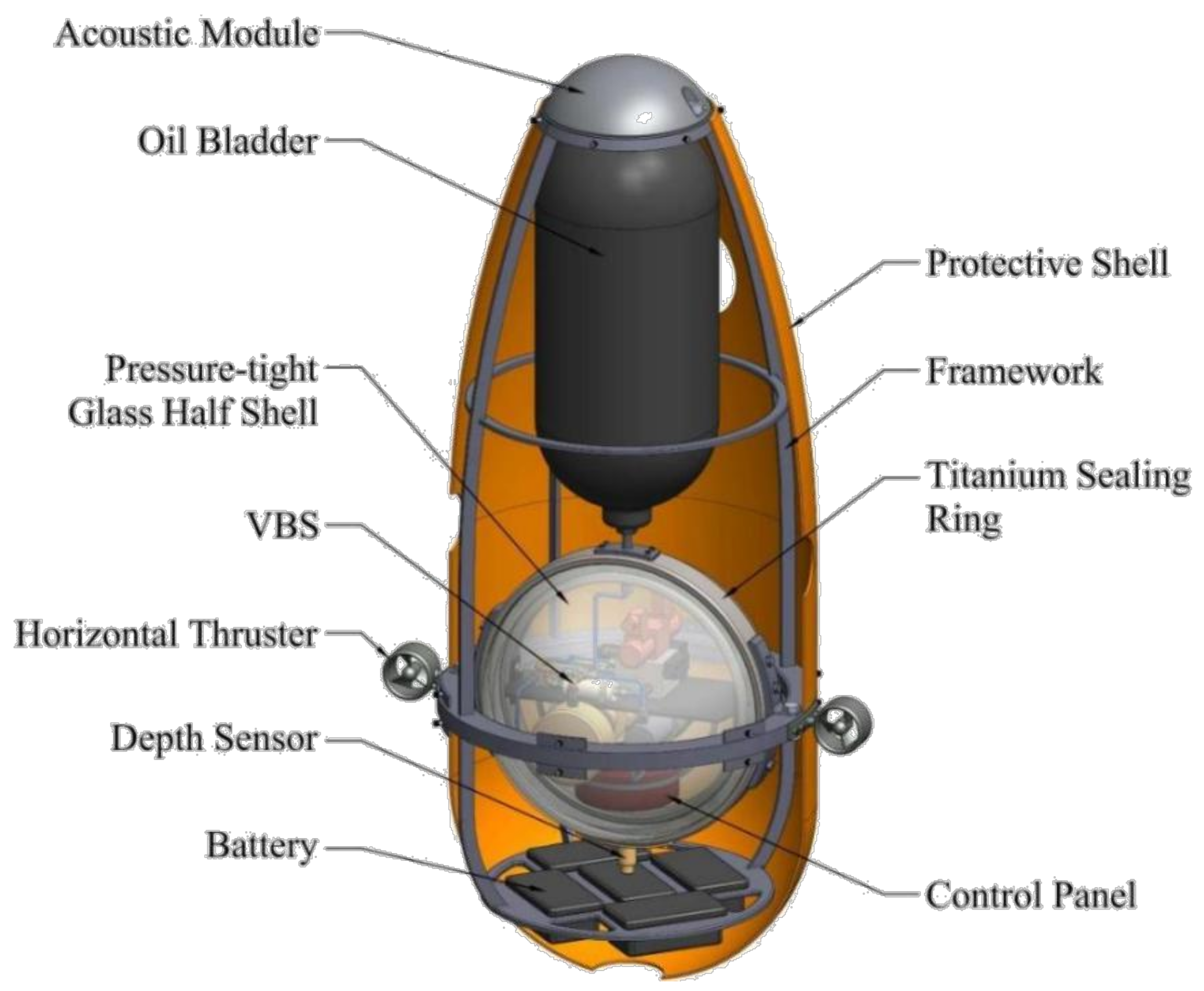
2.1. System Description
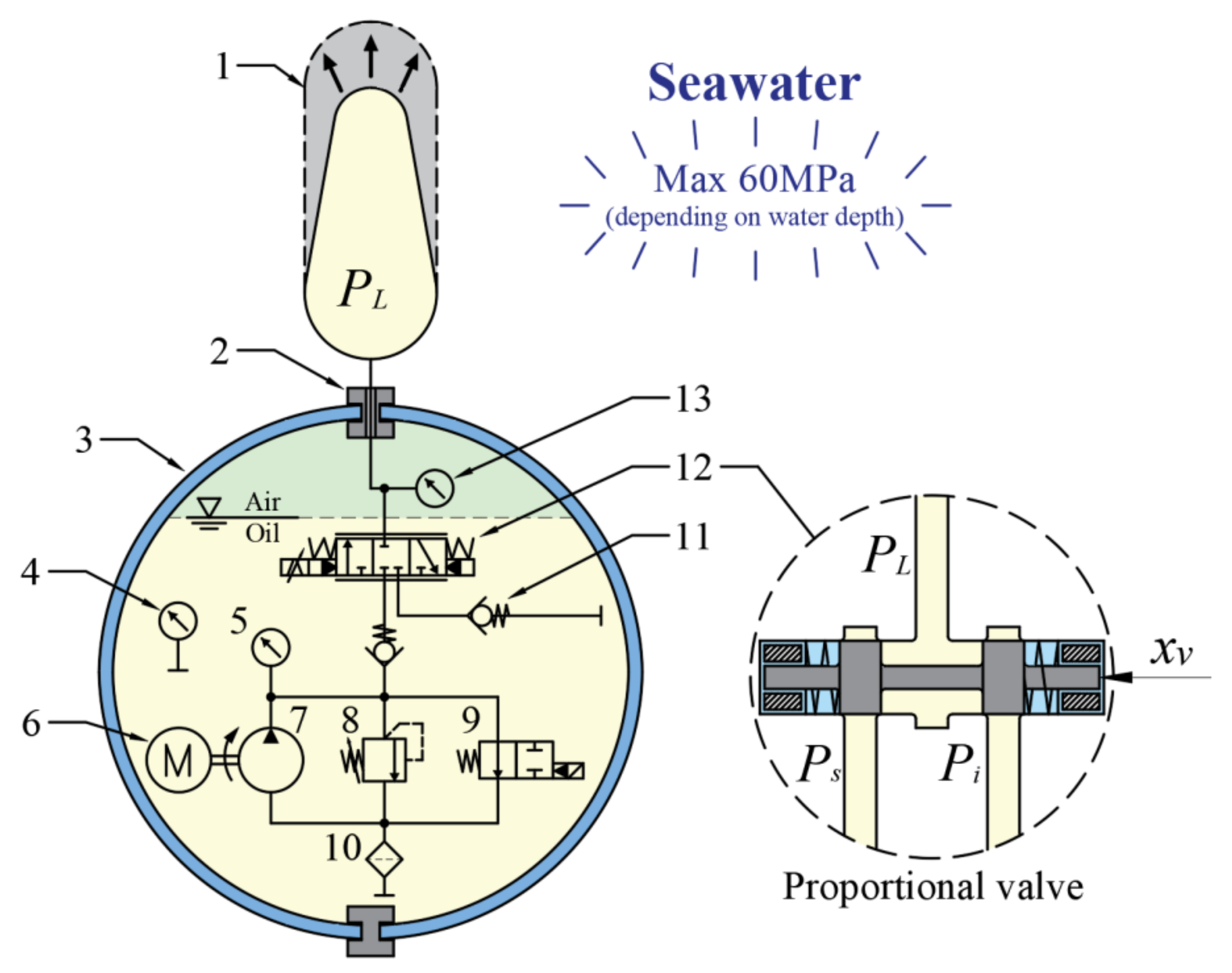
2.2. Hydraulic VBS
2.3. AUV Dynamic Model
2.3.1. Assumptions
- The motion of the AUV in surge, sway, roll, pitch, and yaw directions was neglected;
- The oil bladder was filled with about 20 L (half of the total volume) of oil to balance gravity. The AUV had neutral buoyancy;
- The origin of the body-fixed coordinate of the AUV was located at its center of gravity, which is also the ball center of the glass shell.
2.3.2. Mathematical Model
3. Controller Design
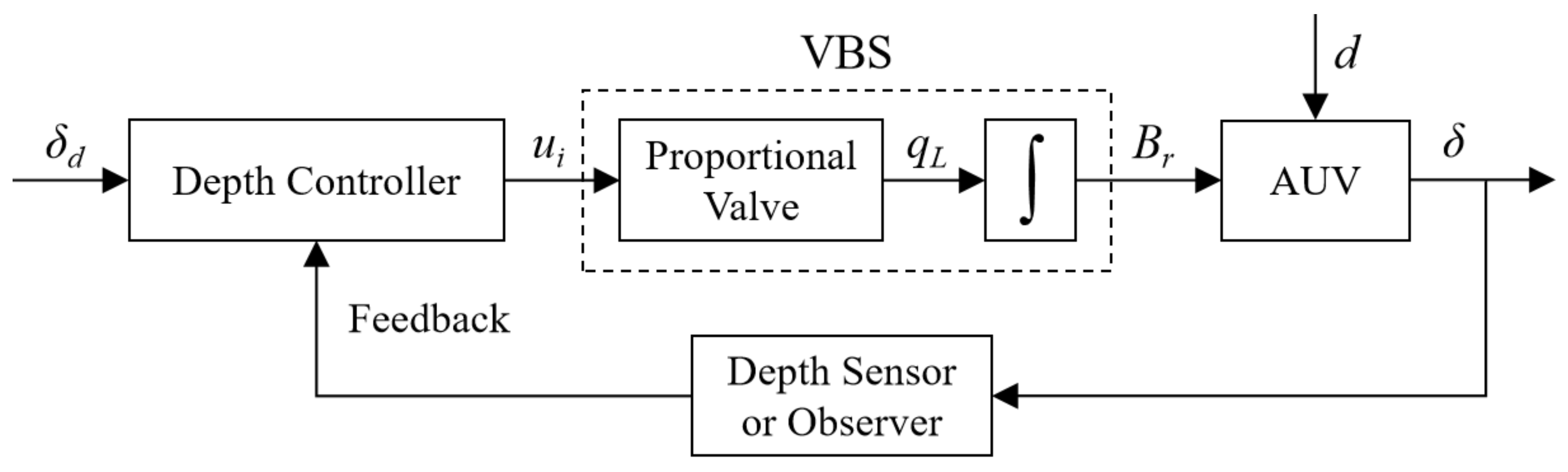
3.1. Depth Control Principle
3.2. PID Controller
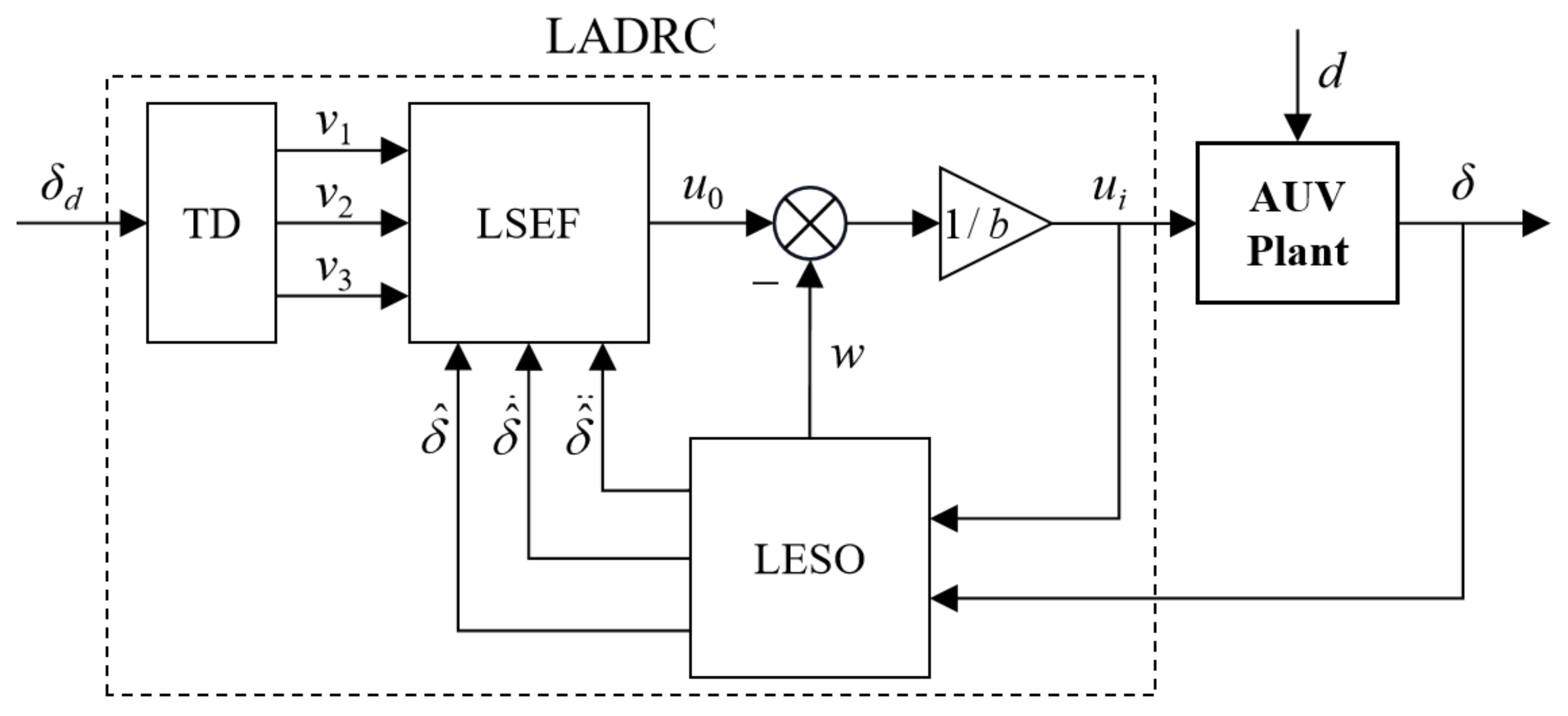
3.3. Linear Active Disturbance Rejection Controller (LADRC)
3.3.1. Tracking Differentiator (TD)
3.3.2. Linear Extended State Observer (LESO)
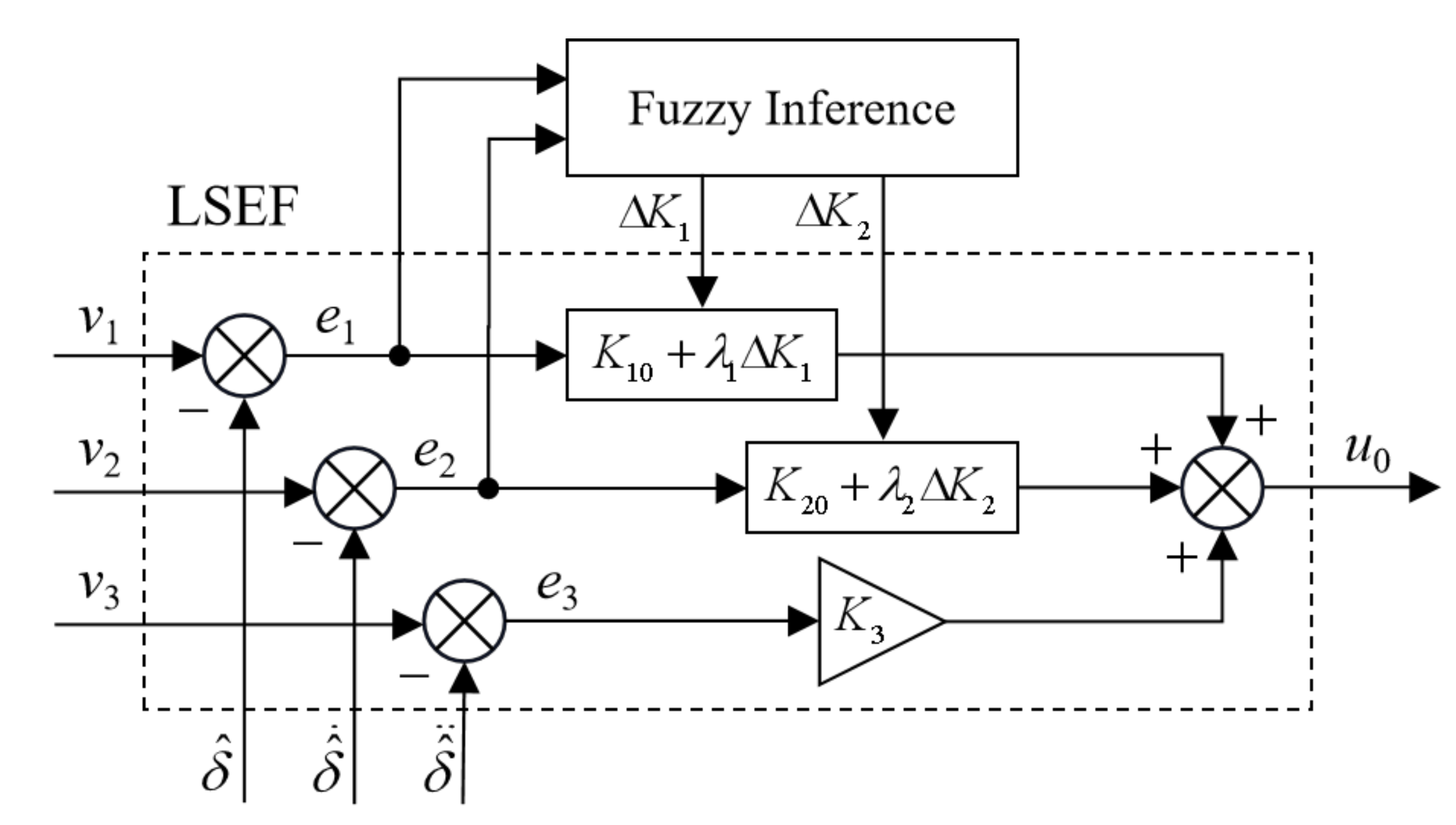
3.3.3. Linear State Error Feedback (LSEF) Control Law
3.4. Fuzzy LADRC Controller (F-LADRC)
- Converts the input values e1 and e2 to the fuzzy subsets by membership functions;
- Returns the output fuzzy subsets according to the fuzzy rules;
- Converts the output fuzzy subsets to output values ΔK1 and ΔK2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ΔK1/ΔK2 | e2 | ||||||
|---|---|---|---|---|---|---|---|
| e1 | NB | NM | NS | ZO | PS | PM | PB |
| NB | NB/PS | NB/NS | NM/NB | NM/NB | NS/NB | NS/NM | ZO/PS |
| NM | NB/PS | NB/NS | NM/NB | NS/NM | NS/NM | ZO/NS | PS/ZO |
| NS | NM/ZO | NM/NS | NM/NM | NS/NM | ZO/NS | PS/NS | PM/ZO |
| ZO | NM/ZO | NM/NS | NS/NS | ZO/NS | PS/NS | PM/NS | PM/ZO |
| PS | NM/ZO | NS/ZO | ZO/ZO | PS/ZO | PM/ZO | PM/ZO | PM/ZO |
| PM | NS/PB | ZO/NS | PS/PS | PS/PS | PM/PM | PB/PM | PB/PB |
| PB | ZO/PB | PS/PM | PS/PM | PM/PM | PM/PS | PB/PS | PB/PB |
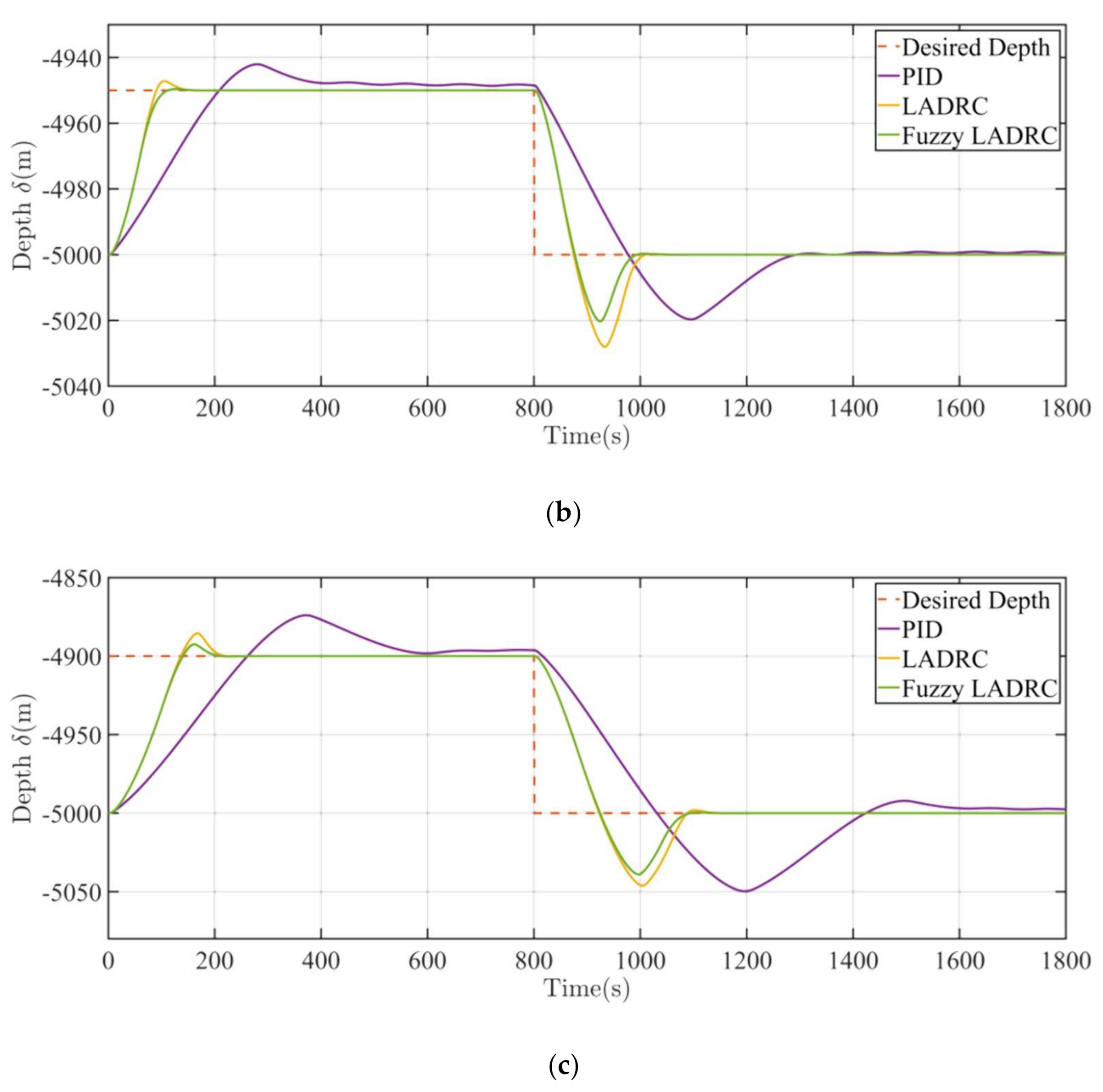
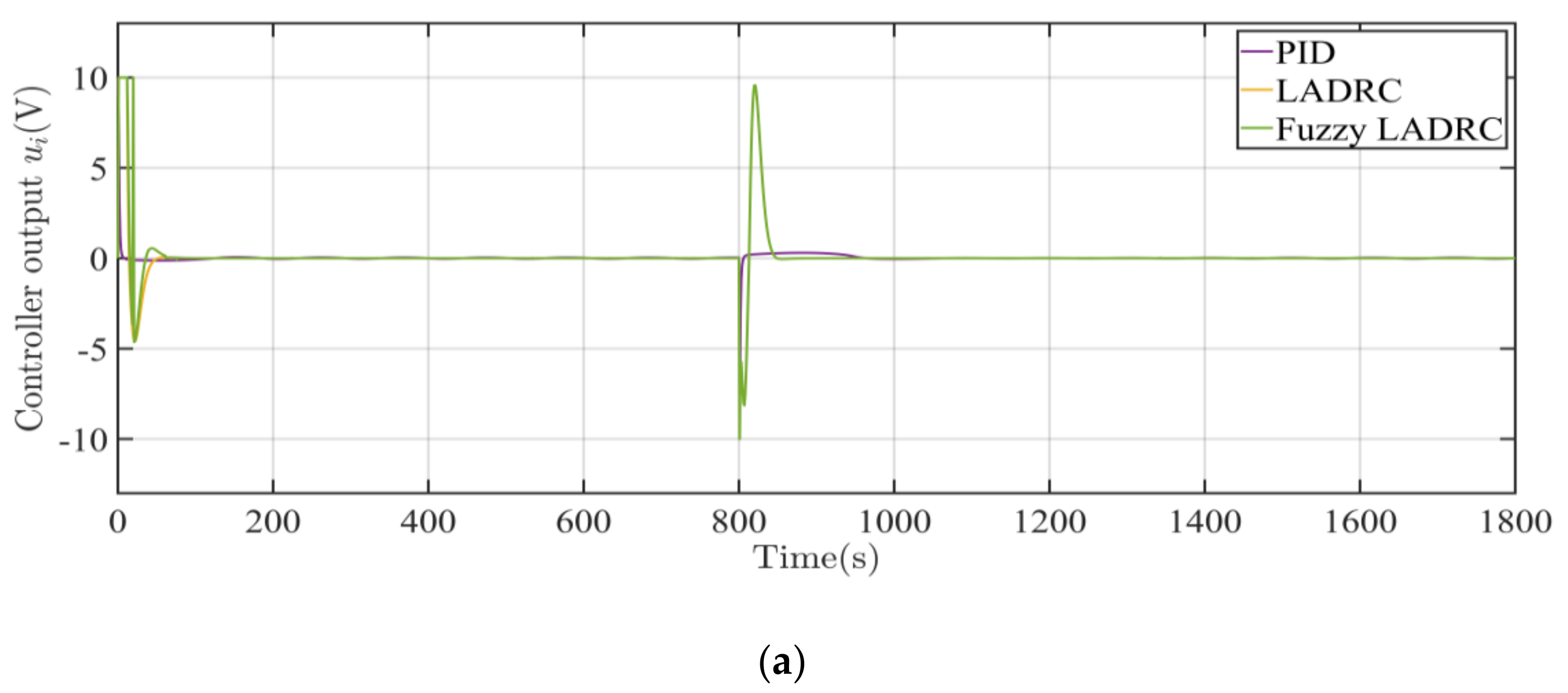
4. Simulation Results and Analysis
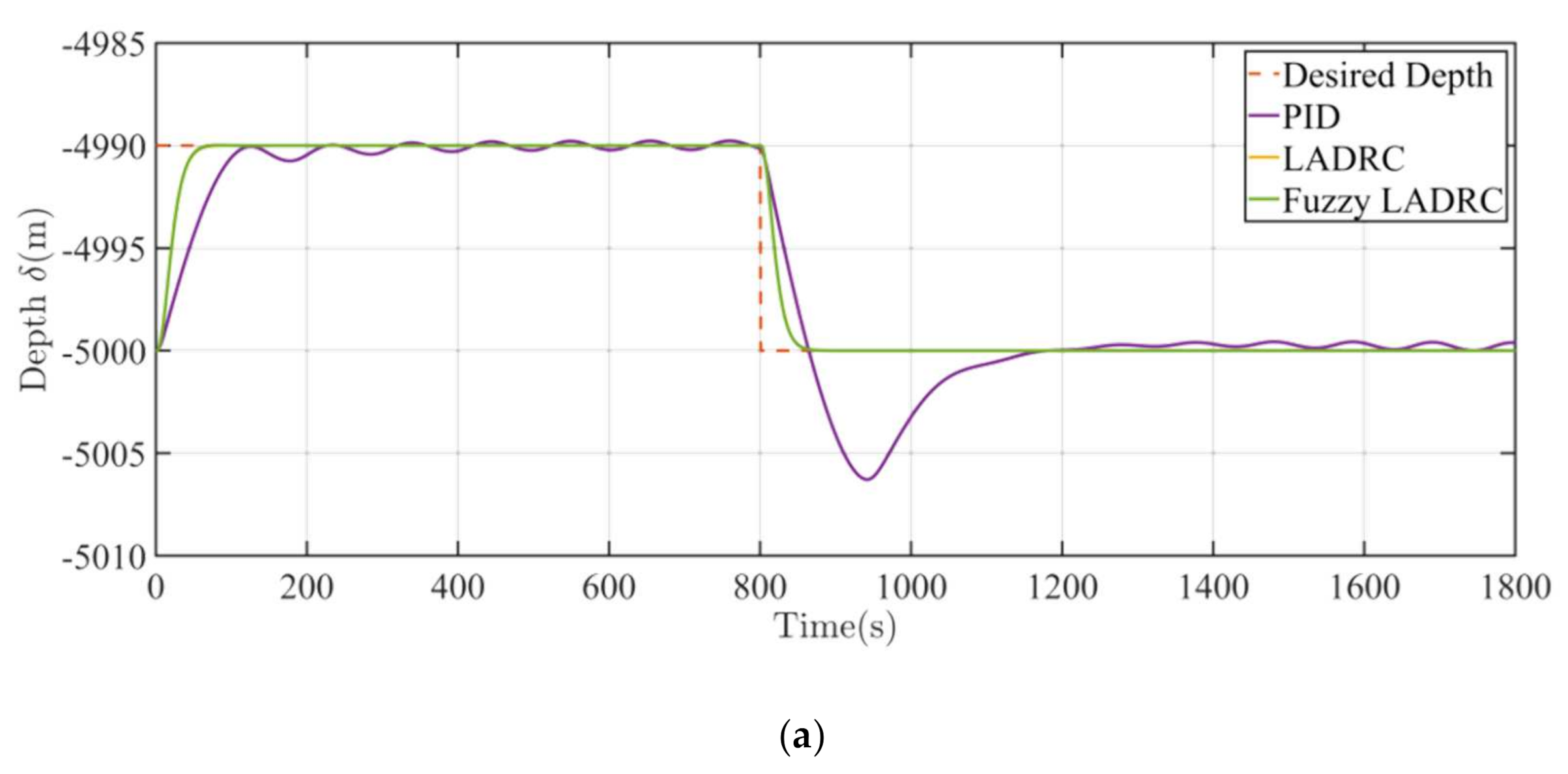
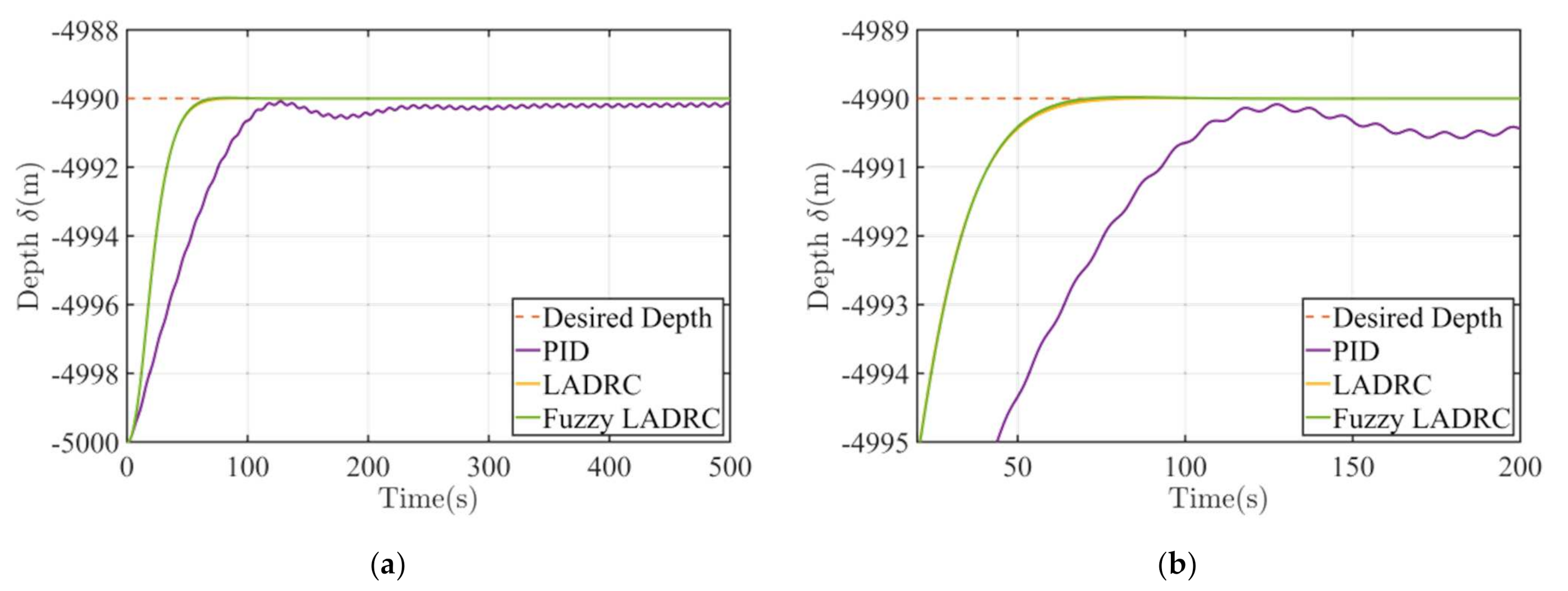
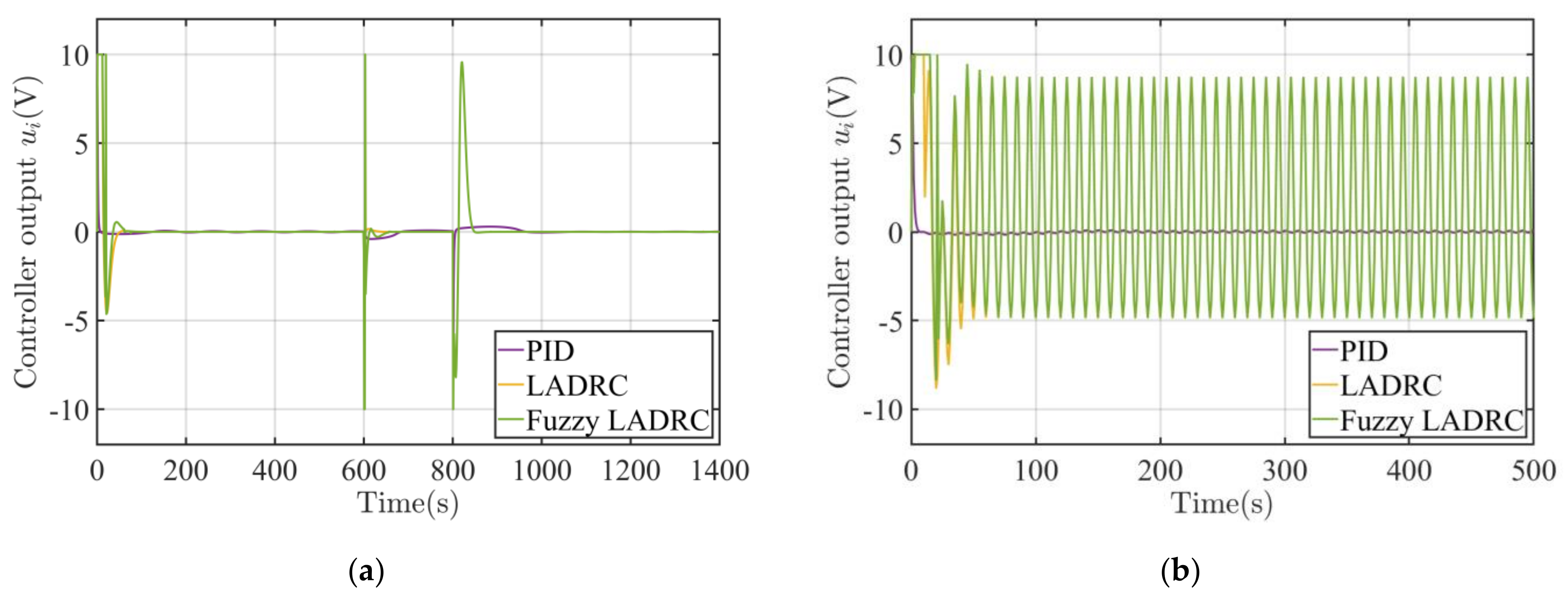
4.1. Without Disturbance
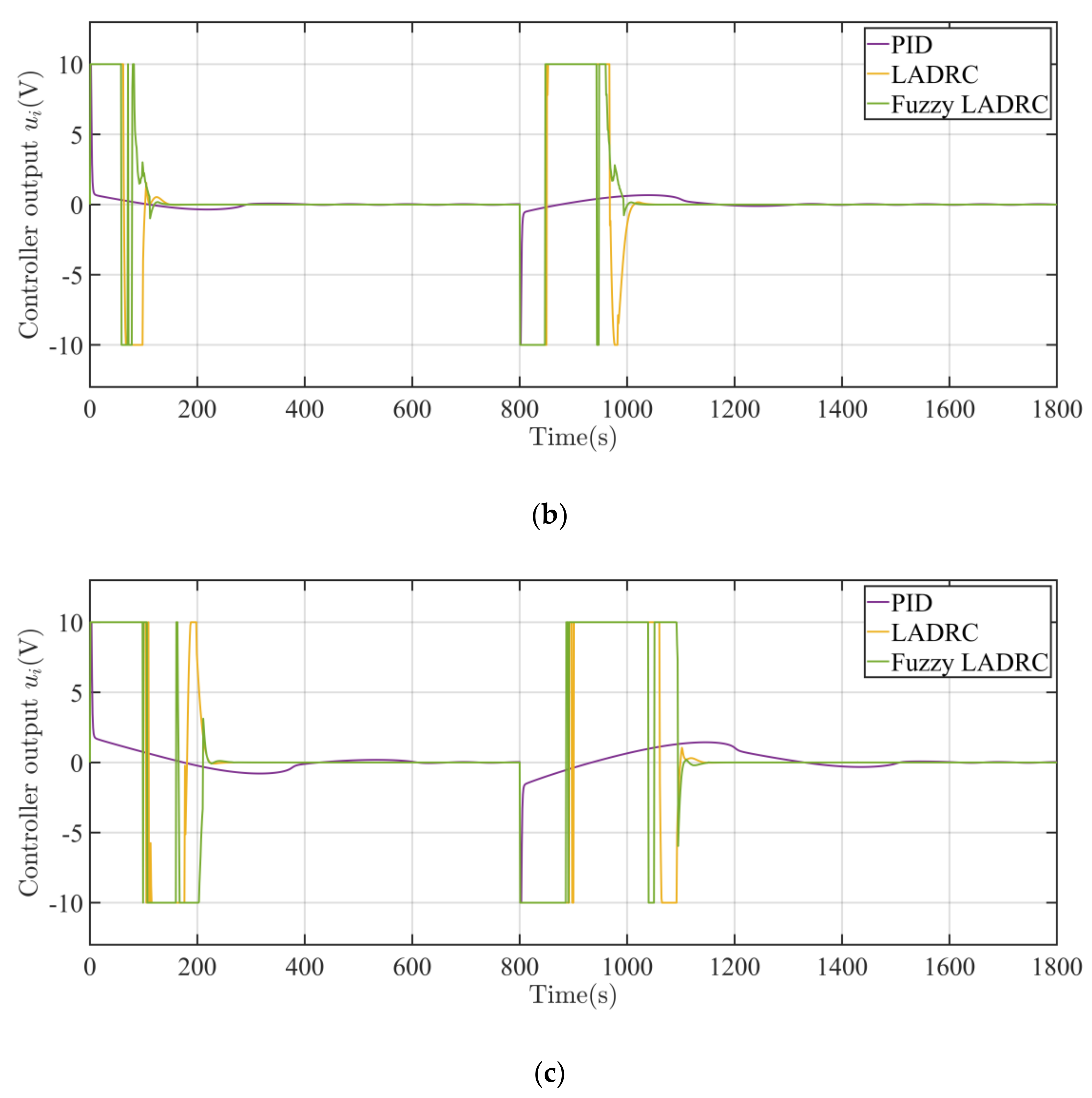
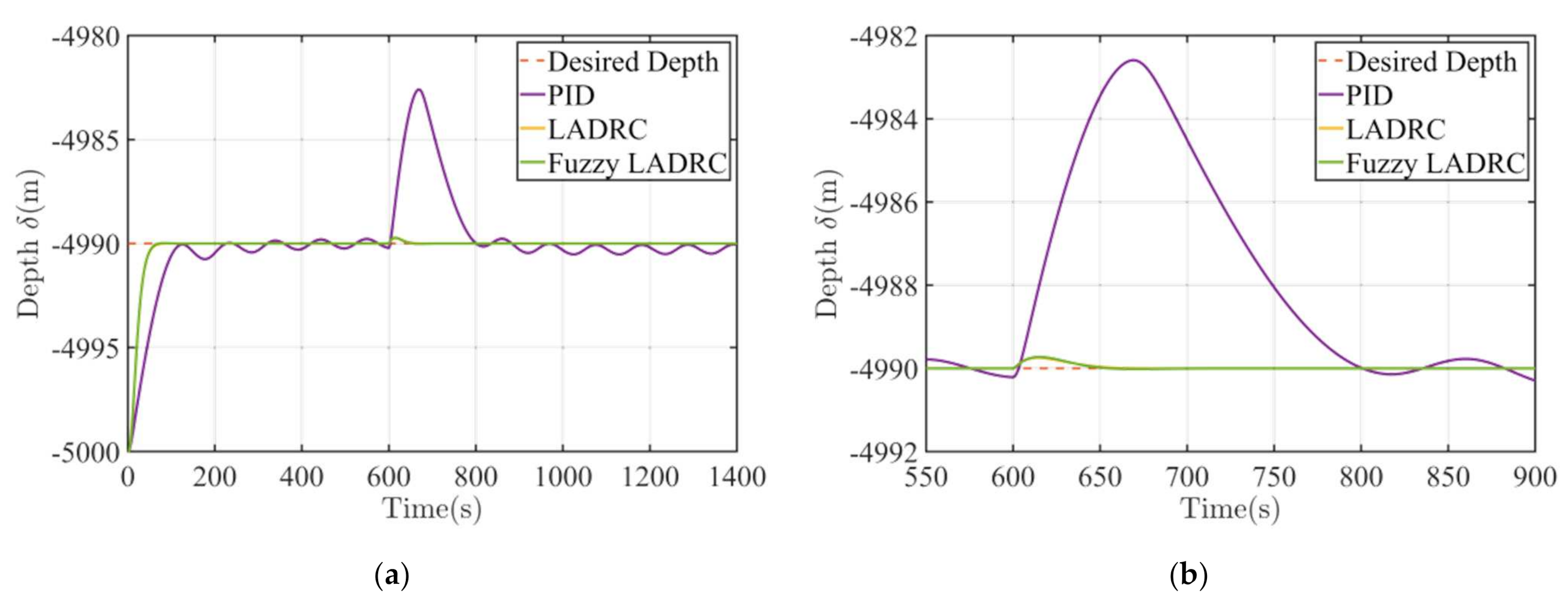
4.2. With Disturbance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Howell, S.M.; Stone, W.C.; Craft, K.; German, C.; Murray, A.; Rhoden, A.; Arrigo, K. Ocean Worlds Exploration and the Search for Life. arXiv 2020, arXiv:2006.15803. [Google Scholar] [CrossRef]
- Auzende, J.M.; Bideau, D.; Bonatti, E.; Cannat, M.; Honnorez, J.; Lagabrielle, Y.; Malavieille, J.; Mamaloukas-Frangoulis, V.; Mével, C. The MAR-Vema Fracture Zone intersection surveyed by deep submersible Nautile. Terra Nova 1990, 2, 68–73. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Lv, X.; Cao, W.; Sun, C.; Lu, J.; Wang, C.; Lu, B.; Yang, J. Watermass properties and deep currents in the northern Yap Trench observed by the Submersible Jiaolong system. Deep Sea Res. Part I Oceanogr. Res. Pap. 2018, 139, 27–42. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Almeida, J.; Bayat, M.; Cardeira, B.; Cunha, R.; Häusler, A.; Maurya, P.; Oliveira, A.; Pascoal, A.; Pereira, A.; et al. Cooperative control of multiple marine vehicles theoretical challenges and practical issues. IFAC Proc. Vol. 2019, 42, 412–417. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Anderlini, E.; Wang, S.; Ma, S.; Ding, Z. Ocean Explorations Using Autonomy: Technologies, Strategies and Applications. In Offshore Robotics; Springer: Singapore, 2022; pp. 35–58. [Google Scholar] [CrossRef]
- Gafurov, S.A.; Klochkov, E.V. Autonomous unmanned underwater vehicles development tendencies. Procedia Eng. 2015, 106, 141–148. [Google Scholar] [CrossRef] [Green Version]
- Nolet, G. MERMAID seismometry in the oceans: Resolving the detail of geodynamic processes. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 17–22 April 2016. [Google Scholar]
- Hussain, N.A.A.; Arshad, M.R.; Mohd-Mokhtar, R. Underwater glider modelling and analysis for net buoyancy, depth and pitch angle control. Ocean. Eng. 2011, 38, 1782–1791. [Google Scholar] [CrossRef]
- Jensen, H.F. Variable Buoyancy System Metric. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2009. [Google Scholar]
- Rigaud, V.; Nicolas-Meunier, B. From manned to autonomous and hybrid underwater systems. In Proceedings of the 2015 IEEE Underwater Technology, Chennai, India, 23–25 February 2015; IEEE: Piscataway, NJ, USA, 2010; pp. 1–10. [Google Scholar] [CrossRef]
- Rona, P.A. Deep-diving manned research submersibles. Mar. Technol. Soc. J. 1999, 33, 13–25. [Google Scholar] [CrossRef]
- Schneider, W.E. Alvins oil-seawater hydraulics overcomes 6000-psi backpressure. Hydraul. Pneum. 1975, 28, 61–63. [Google Scholar]
- Nanba, N.; Morihana, H.; Nakamura, E.; Watanabe, N. Development of deep submergence research vehicle “SHINKAI 6500”. Tech. Rev. Mitsubishi Heavy Ind. Ltd. 1990, 27, 157–168. [Google Scholar]
- Komuku, T.; Matsumoto, K.; Imai, Y.; Sakurai, T.; Ito, K. 1000 Dives by the Shinkai 6500 in 18 Years. In Proceedings of the 2007 Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 21–27. [Google Scholar] [CrossRef]
- Qiu, Z. Design and research on a variable ballast system for deep-sea manned submersibles. J. Mar. Sci. Appl. 2008, 7, 255–260. [Google Scholar] [CrossRef]
- Cui, W. An overview of submersible research and development in China. J. Mar. Sci. Appl. 2018, 17, 459–470. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, D.; Li, D.; Zhao, X. Seawater hydraulic buoyancy adjusting system for large-depth submersible. Chin. Hydraul. Pneum. 2014, 38, 1–10. (In Chinese) [Google Scholar] [CrossRef]
- Liu, F.; Cui, W.; Li, X. China’s first deep manned submersible, JIAOLONG. Sci. China Earth Sci. 2010, 53, 1407–1410. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, Y.; Han, M.; Wu, D.; Li, D. Improving the performance of an AUV hovering system by introducing low-cost flow rate control into water hydraulic variable ballast system. Ocean. Eng. 2016, 125, 155–169. [Google Scholar] [CrossRef]
- Choyekh, M.; Kato, N.; Yamaguchi, Y.; Dewantara, R.; Senga, H.; Chiba, H.; Yoshie, M.; Tanaka, T.; Kobayashi, E. Depth Control of AUV Using a Buoyancy Control Device. In Mechatronics and Robotics Engineering for Advanced and Intelligent Manufacturing; Springer: Cham, Switzerland, 2017; pp. 431–444. [Google Scholar] [CrossRef]
- Xu, J.A.; Zhang, M.J. A variable buoyancy system for long cruising range AUV. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; IEEE: Piscataway, NJ, USA, 2010; Volume 2, pp. 585–588. [Google Scholar] [CrossRef]
- Busquets-Mataix, J.; Busquets-Mataix, J.V.; Busquets-Mataix, D. Combined gas-fluid buoyancy system for improved attitude and maneuverability control for application in underwater gliders. IFAC-PapersOnLine 2015, 48, 281–287. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Cagnetti, M. A high accuracy buoyancy system control for an underwater glider. In Proceedings of the 2018 IEEE International Workshop on Metrology for the Sea, Learning to Measure Sea Health Parameters (MetroSea), Bari, Italy, 8–10 October 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 257–261. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Cagnetti, M. High accuracy buoyancy for underwater gliders: The uncertainty in the depth control. Sensors 2019, 19, 1831. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Asakawa, K.; Watari, K.; Ohuchi, H.; Nakamura, M.; Hyakudome, T.; Ishihara, Y. Buoyancy engine developed for underwater gliders. Adv. Robot. 2016, 30, 41–49. [Google Scholar] [CrossRef]
- Zhou, H.; Fu, J.; Liu, C.; Zeng, Z.; Yu, C.; Yao, B.; Lian, L. Dynamic modeling and endurance enhancement analysis of deep-sea gliders with a hybrid buoyancy regulating system. Ocean. Eng. 2020, 217, 108146. [Google Scholar] [CrossRef]
- Inoue, T.; Shibuya, K.; Nagano, A. Underwater robot with a buoyancy control system based on the spermaceti oil hypothesis development of the depth control system. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1102–1107. [Google Scholar] [CrossRef]
- Hou, J.; Zou, W.; Li, Z.; Gong, Y.; Burnashev, V.; Ning, D. Development and Experiments of an Electrothermal Driven Deep-Sea Buoyancy Control Module. Micromachines 2020, 11, 1017. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, Y.; Wu, Y.; Wu, G.; Liu, X.; Huang, H. Depth Control of Floating Ocean Seismograph Based on Variable Buoyancy System. In Proceedings of the OCEANS 2018 MTS/IEEE, Charleston, SC, USA, 22–25 October 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Conte, G. Remotely operated vehicle depth control. Control Eng. Pract. 2003, 11, 453–459. [Google Scholar] [CrossRef]
- Bessa, W.M.; Dutra, M.S.; Kreuzer, E. Depth control of remotely operated underwater vehicles using an adaptive fuzzy sliding mode controller. Robot. Auton. Syst. 2008, 56, 670–677. [Google Scholar] [CrossRef]
- Skjong, S.; Pedersen, E. Model-based control designs for offshore hydraulic winch systems. Ocean. Eng. 2016, 121, 224–238. [Google Scholar] [CrossRef]
- Medvedev, A.V.; Kostenko, V.V.; Tolstonogov, A.Y. Depth control methods of variable buoyancy AUV. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, Korea, 21–24 February 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Bi, A.; Feng, Z. Hierarchical Control of Underwater Vehicle Variable Ballast Systems. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 3911–3914. [Google Scholar] [CrossRef]
- Kan, L.; Zhang, Y.; Fan, H.; Yang, W.; Chen, Z. MATLAB-based simulation of buoyancy-driven underwater glider motion. J. Ocean. Univ. China 2008, 7, 113–118. [Google Scholar] [CrossRef]
- Moon, J.H.; Jee, S.C.; Lee, H.J. Output-feedback control of underwater gliders by buoyancy and pitching moment control: Feedback linearization approach. International Journal of Control. Autom. Syst. 2016, 14, 255–262. [Google Scholar] [CrossRef]
- DeBitetto, P.A. Fuzzy logic for depth control of unmanned undersea vehicles. IEEE J. Ocean. Eng. 1995, 20, 242–248. [Google Scholar] [CrossRef]
- Li, H.M.; Wang, X.B.; Song, S.B.; Li, H. Vehicle control strategies analysis based on PID and fuzzy logic control. Procedia Eng. 2016, 137, 234–243. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Zhang, C.; Ding, W.; Zhu, X.; Sun, G.; Wang, H. Design of the Depth Controller for a Floating Ocean Seismograph. J. Mar. Sci. Eng. 2020, 8, 166. [Google Scholar] [CrossRef] [Green Version]
- Shine, S.; Xiong, H.; Fu, J. Active disturbance rejection control for AUV pitch angle. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2018; IEEE: Piscataway, NJ, USA, 2016; pp. 411–415. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, H.; Li, Y. Depth Control of AUV Using Sliding Mode Active Disturbance Rejection Control. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 300–305. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, M.T. Design of a non-singular adaptive integral-type finite time tracking control for nonlinear systems with external disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.-H.; Thanh, H.L.N.N.; Huynh, T.-T.; Van, M.; Hoang, Q.-D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Vu, M.T.; Thanh, H.L.N.N.; Huynh, T.-T.; Thang, Q.; Duc, T.; Hoang, Q.-D.; Le, T.-H. Station-keeping control of a hovering over-actuated autonomous underwater vehicle under ocean current effects and model uncertainties in horizontal plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B. Precision motion control of a servomotor-pump direct-drive electrohydraulic system with a nonlinear pump flow mapping. IEEE Trans. Ind. Electron. 2019, 67, 8638–8648. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B.; Lyu, L.; Li, C. Accurate Motion Control of a Direct-drive Hydraulic System with an Adaptive Nonlinear Pump Flow Compensation. IEEE/ASME Trans. Mechatron. 2020, 26, 2593–2603. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Development of pump and valves combined hydraulic system for both high tracking precision and high energy efficiency. IEEE Trans. Ind. Electron. 2018, 66, 7189–7198. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Advanced valves and pump coordinated hydraulic control design to simultaneously achieve high accuracy and high efficiency. IEEE Trans. Control Syst. Technol. 2020, 29, 236–248. [Google Scholar] [CrossRef]
- Hoerner, S.F. Fluid Dynamic Drag, Practical Information on Aerodynamic Drag and Hydrodynamic Resistance. In Hoerner Fluid Dynamics; Published by the Author: Midland Park, NJ, USA, 1965; p. 455. [Google Scholar]
- Huang, K.L.; Pang, Y.J.; Su, Y.M.; Zhu, J. Research on linearity hydrodynamic coefficients calculation method of submergible vehicle. J. Ship Mech. 2008, 5, 697–703. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Piscataway, NJ, USA, 2006; Volume 6, pp. 4989–4996. [Google Scholar]
- Qi, X.; Li, J.; Xia, Y.; Gao, Z. On the robust stability of active disturbance rejection control for SISO systems. Circuits Syst. Signal Process. 2017, 36, 65–81. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique—The Technique for Estimating and Compensating the Uncertainties; National Defense Industry Press: Beijing, China, 2008; pp. 197–270. [Google Scholar]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Yoo, D.; Yau, S.S.T.; Gao, Z. On convergence of the linear extended state observer. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; IEEE: Piscataway, NJ, USA, 2009; pp. 1645–1650. [Google Scholar] [CrossRef]
| Types | Adjust Method | Adjust Speed | Complexity | Accuracy |
|---|---|---|---|---|
| Mass discarding | Mass | High | Simple | - |
| Water ballast | Mass | Normal | High | Low |
| Oil bladder | Volume | Low | Normal | High |
| Parameters | Unit | Value |
|---|---|---|
| Max. depth | m | 6000 |
| Max. pressure | MPa | 60 |
| Buoyancy range | kg | ±20 |
| Oil bladder volume | L | 40 |
| Parameters | Numeric Values | Physical Significance |
|---|---|---|
| m | 80 kg | Net weight of AUV |
| r | 0.5 m | Spherical shell radius |
| Ps | 60 MPa | Set pressure of relief valve |
| Pi0 | 0.1 MPa | Initial air pressure |
| Vi0 | 30 L | Initial air volume |
| n | 1.4 | Adiabatic exponent of air |
| Cd | 0.61 | Orifice flow coefficient of proportional valve |
| ω | 3.14 mm2 | Throttle area gradient of proportional valve |
| ρoil | 860 kg/m3 | Oil density |
| ki | 5 × 10−5 m/V | Proportional coefficient of the valve |
| CD | 0.4 | Flow coefficient of AUV in heave direction |
| Controller Type | Control Parameters |
|---|---|
| PID | KP = 0.0022, KI = 1 × 10−5, KD = 2.1 |
| LADRC | b = 0.003747, r = 0.14, ωo = 50, K1 = 120, K2 = 2500, K3 = 20,000 |
| Fuzzy LADRC | μ1 = 0.08, μ2 = 10, λ1 = 10, λ2 = 2000 K10 = 120, K20 = 2500, K30 = 20,000 |
| Controller | Target Distance (m) | Rise Time (s) | 5% Settling Time (s) | Steady-State Error (m) | Max. Overshoot (%) |
|---|---|---|---|---|---|
| PID | 10 | 91 | 198 | −0.01 (Average) | 2.2 |
| 50 | 185 | 384 | −1.6 (Average) | 15.86 | |
| 100 | 236 | 537 | −3.6 (Average) | 26.01 | |
| LADRC | 10 | 41 | 48 | 0 | 0 |
| 50 | 80.5 | 85 | 0 | 5.62 | |
| 100 | 124 | 193 | 0 | 14.62 | |
| F-LADRC | 10 | 40 | 47.5 | 0 | 0 |
| 50 | 86 | 94 | 0 | 0.74 | |
| 100 | 125.5 | 176 | 0 | 7.53 |
| Controller | Rise Time (s) | 5% Settling Time (s) | Average Steady-State Error (m) | Max. Overshoot (%) |
|---|---|---|---|---|
| PID | 94 | 194 | 0.19 | 0 |
| LADRC | 42.5 | 49 | 0 | 0 |
| F-LADRC | 42 | 48 | 0 | 0.2 |
| Controller | Rise Time (s) | 5% Settling Time (s) | Steady-State Error (m) | Max. Overshoot (%) |
|---|---|---|---|---|
| PID | +3 | +103 | +0.2 | –2.2 |
| LADRC | +1.5 | +1 | 0 | 0 |
| F-LADRC | +2 | –0.5 | 0 | +0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Hou, J.; Ning, D.; Gong, Y. Depth Control of an Oil Bladder Type Deep-Sea AUV Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Machines 2022, 10, 163. https://doi.org/10.3390/machines10030163
Zhang F, Hou J, Ning D, Gong Y. Depth Control of an Oil Bladder Type Deep-Sea AUV Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Machines. 2022; 10(3):163. https://doi.org/10.3390/machines10030163
Chicago/Turabian StyleZhang, Fengrui, Jiaoyi Hou, Dayong Ning, and Yongjun Gong. 2022. "Depth Control of an Oil Bladder Type Deep-Sea AUV Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control" Machines 10, no. 3: 163. https://doi.org/10.3390/machines10030163
APA StyleZhang, F., Hou, J., Ning, D., & Gong, Y. (2022). Depth Control of an Oil Bladder Type Deep-Sea AUV Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Machines, 10(3), 163. https://doi.org/10.3390/machines10030163