The Development of Key Technologies in Applications of Vessels Connected to the Internet



Abstract
:1. Introduction
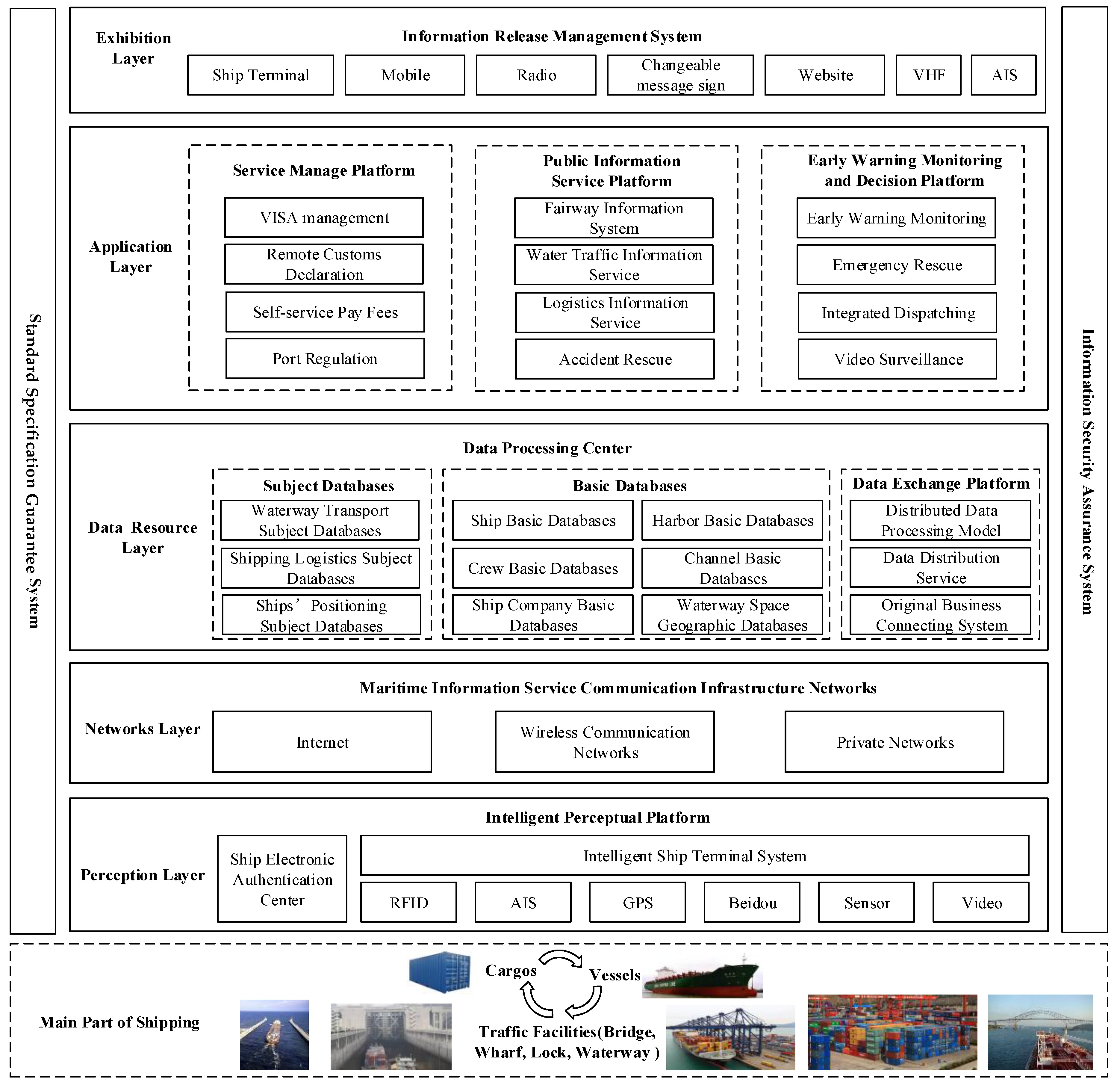
2. Internet of Vessels Architecture
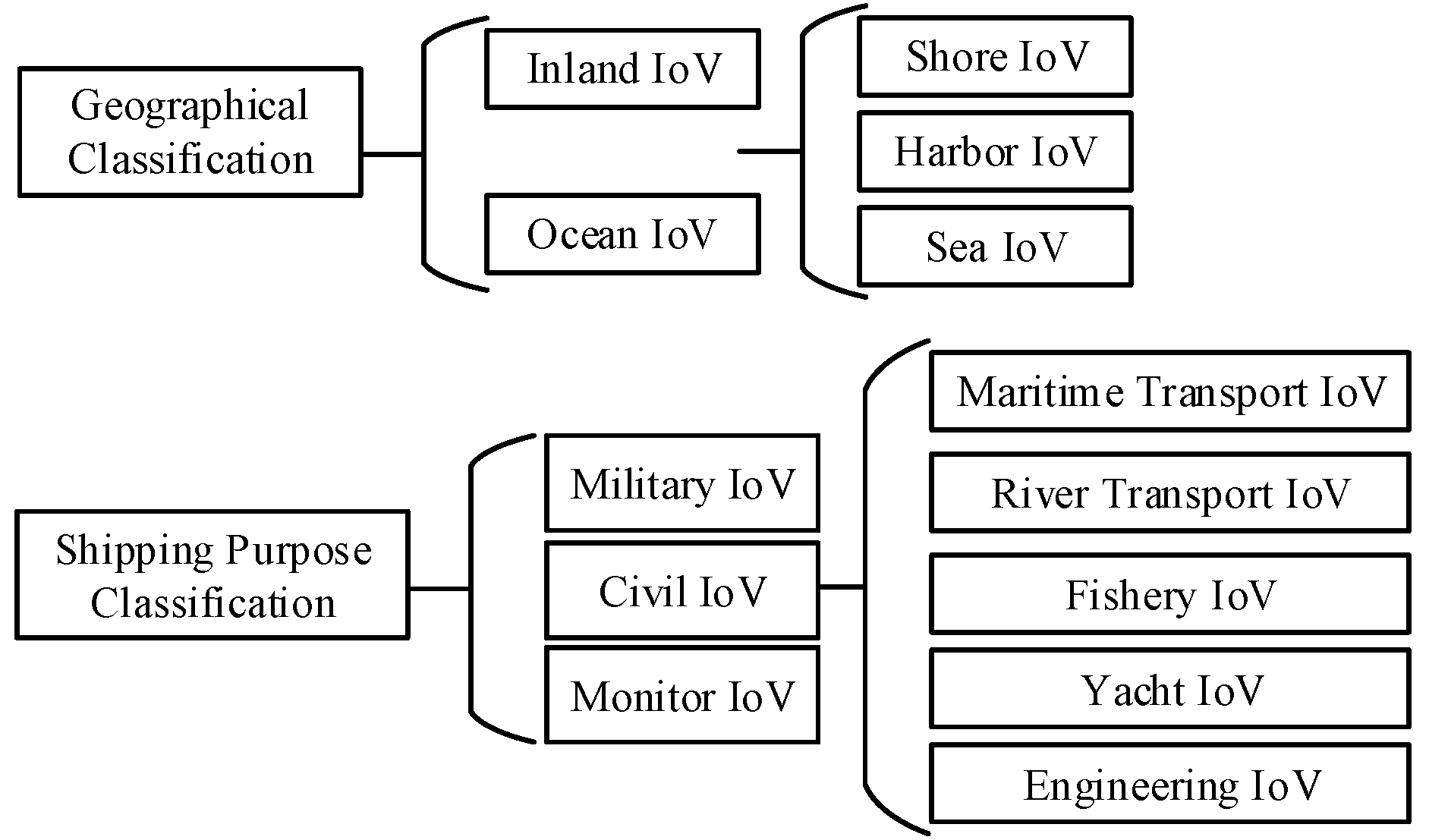
2.1. The Classification of the IoV
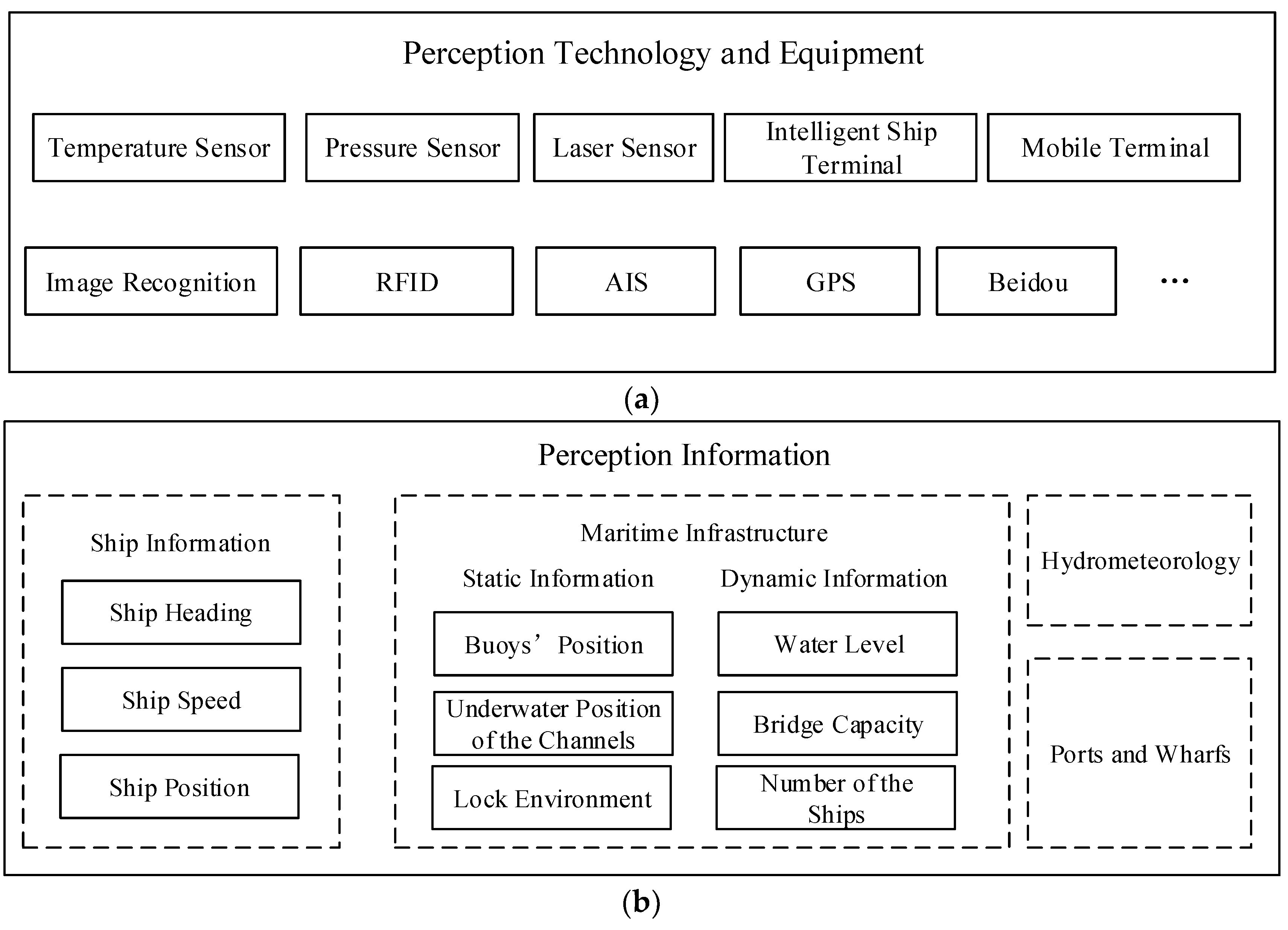
2.2. The Technical Architecture of the Perception Layer
2.3. The Technical Architecture of the Networks Layer
2.3.1. Self-assembling Networks of the IoV with Ad Hoc Technology
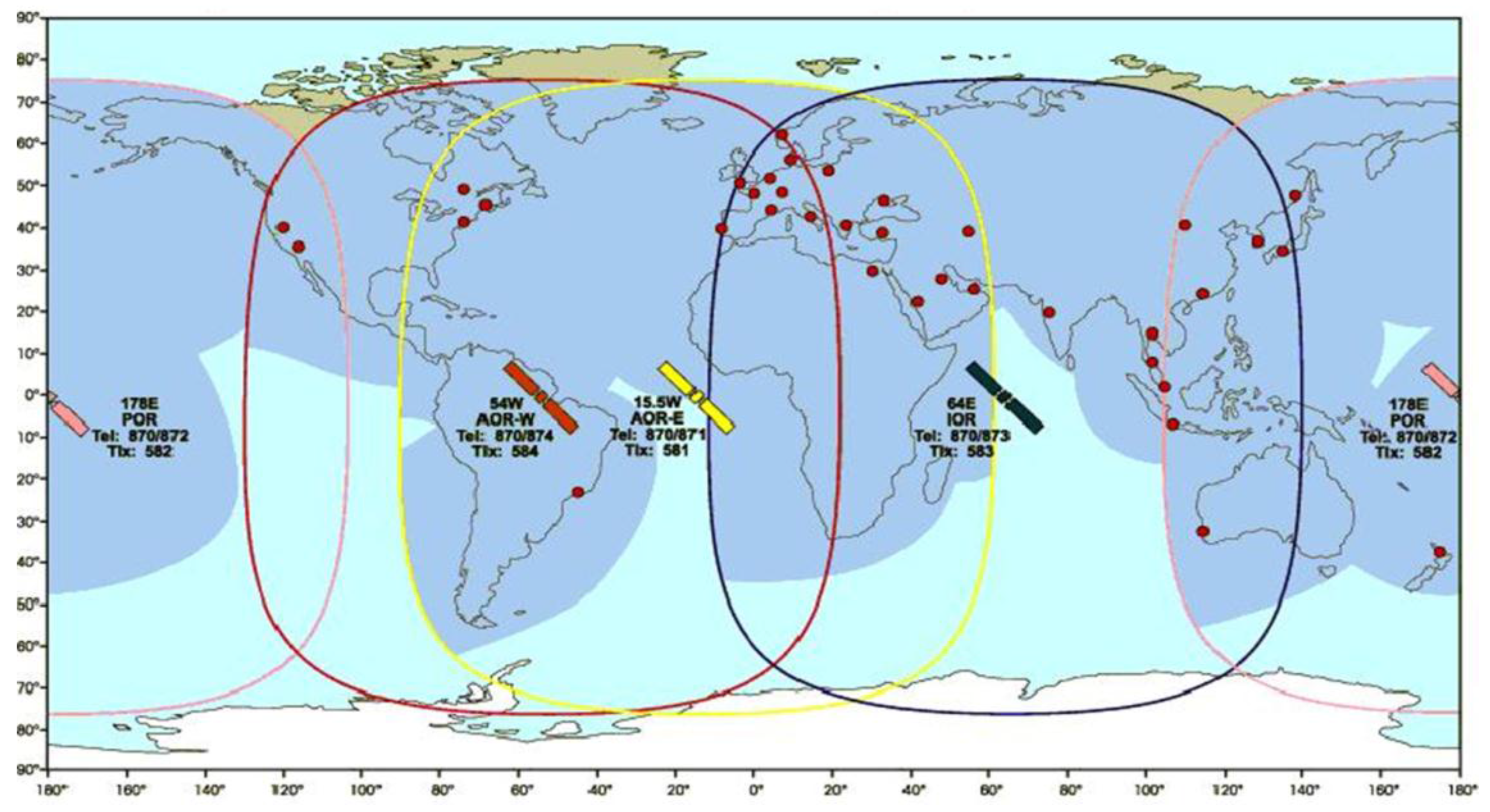
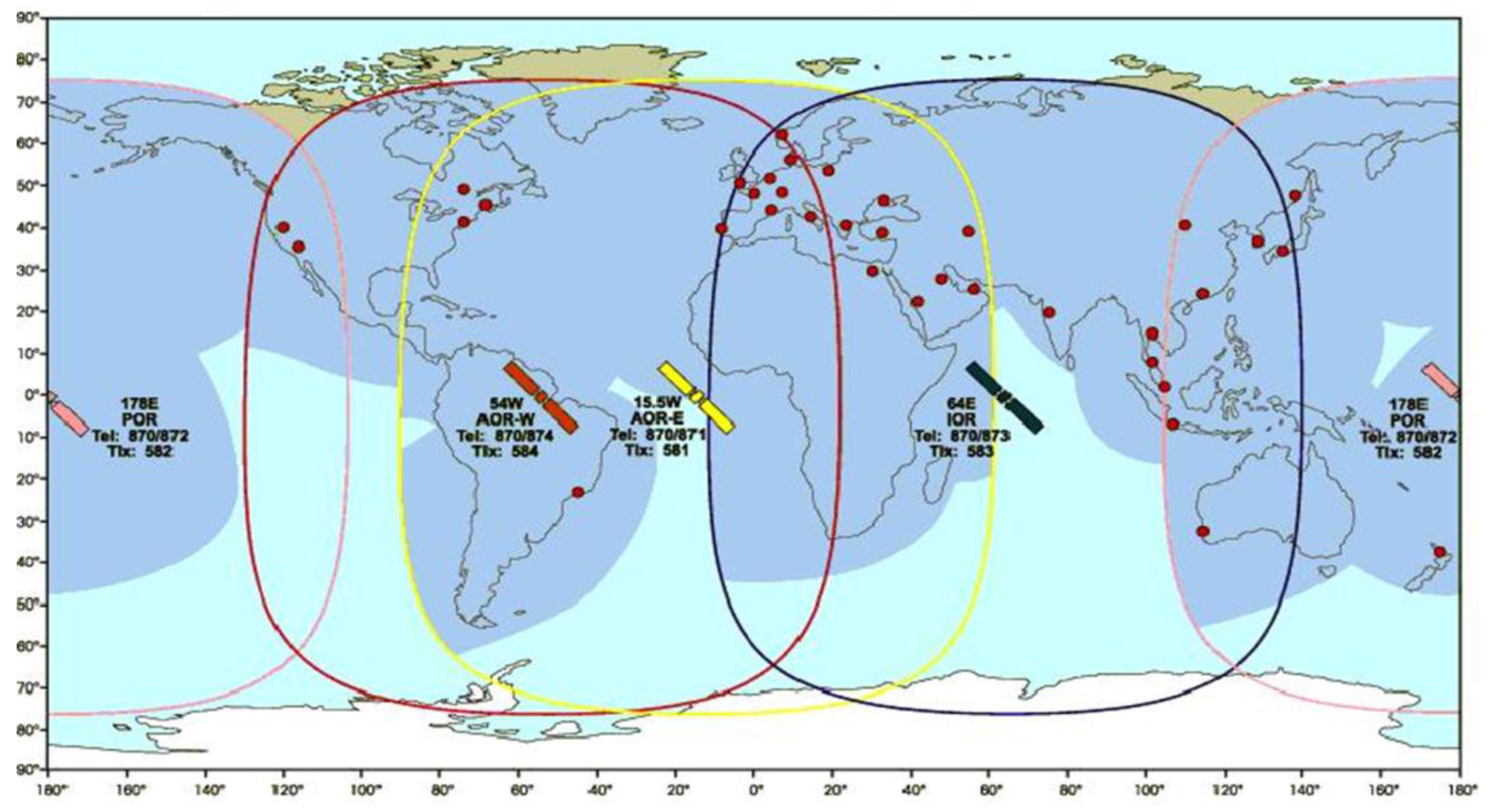
2.3.2. Satellite Centric Mode Networks
2.3.3. Base Station Networks
2.3.4. Opportunistic Networks
2.3.5. Underwater Acoustic Communication Networks
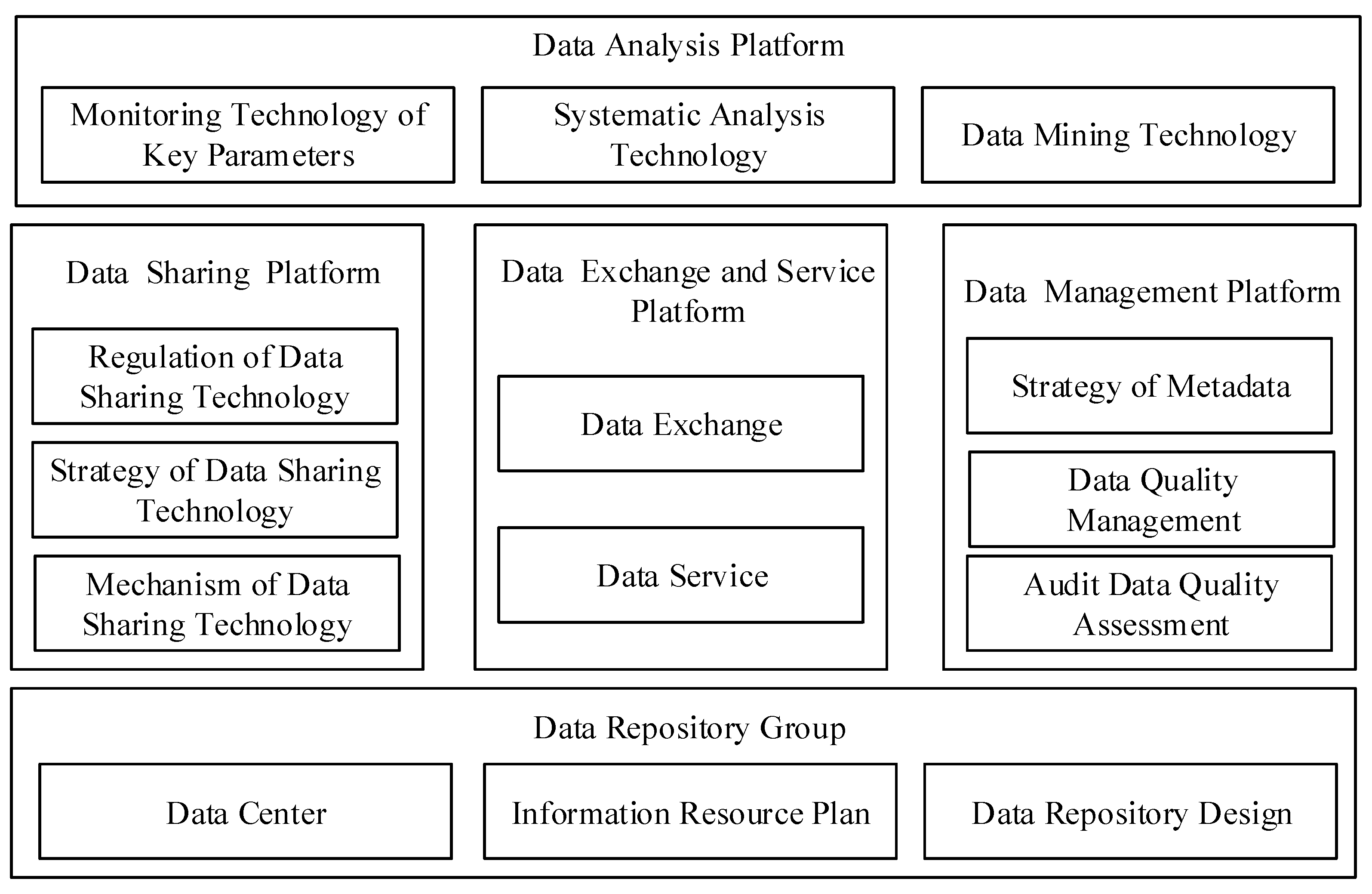
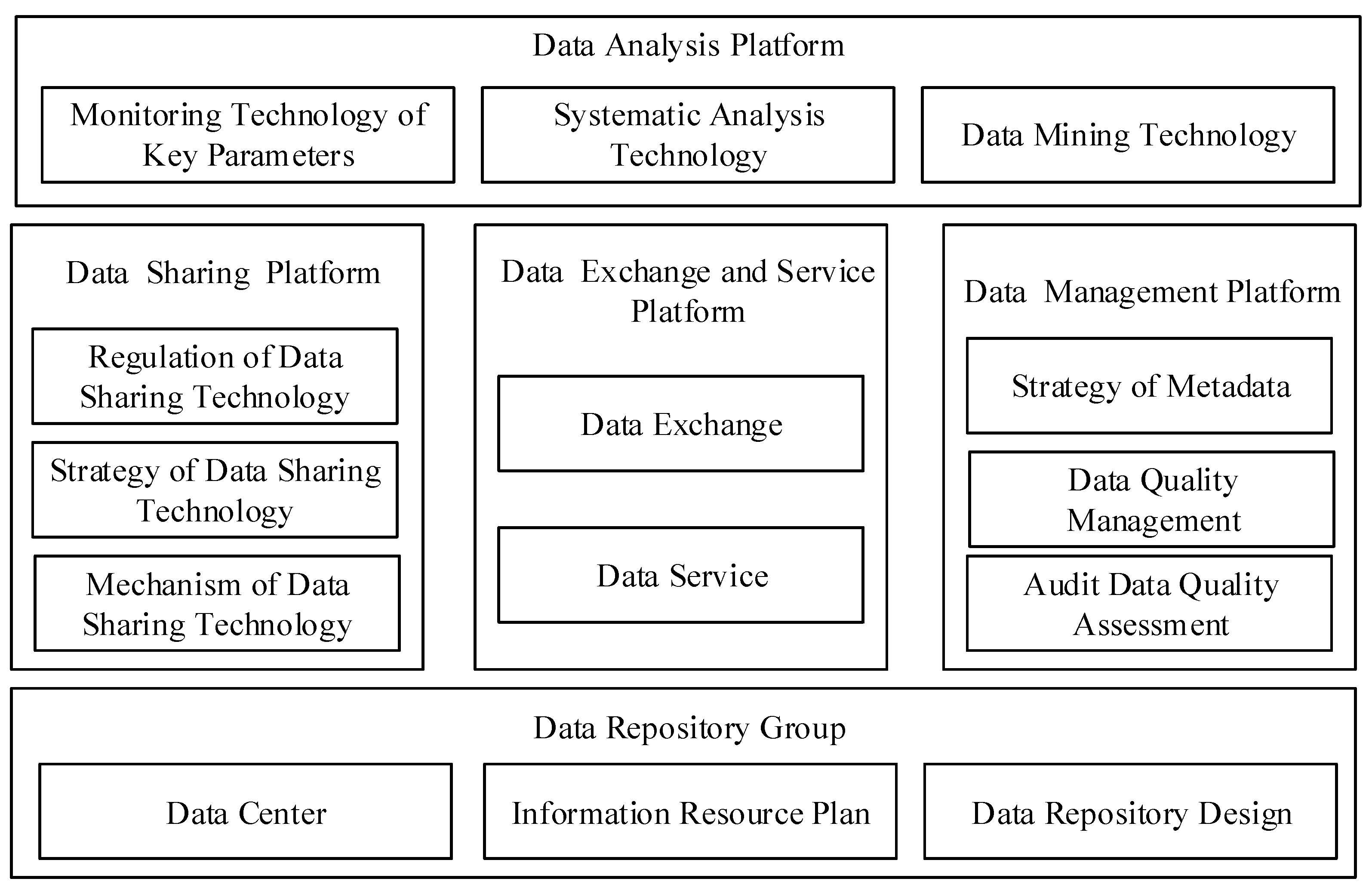
2.4. The Technical Architecture of the Data Resource Layer
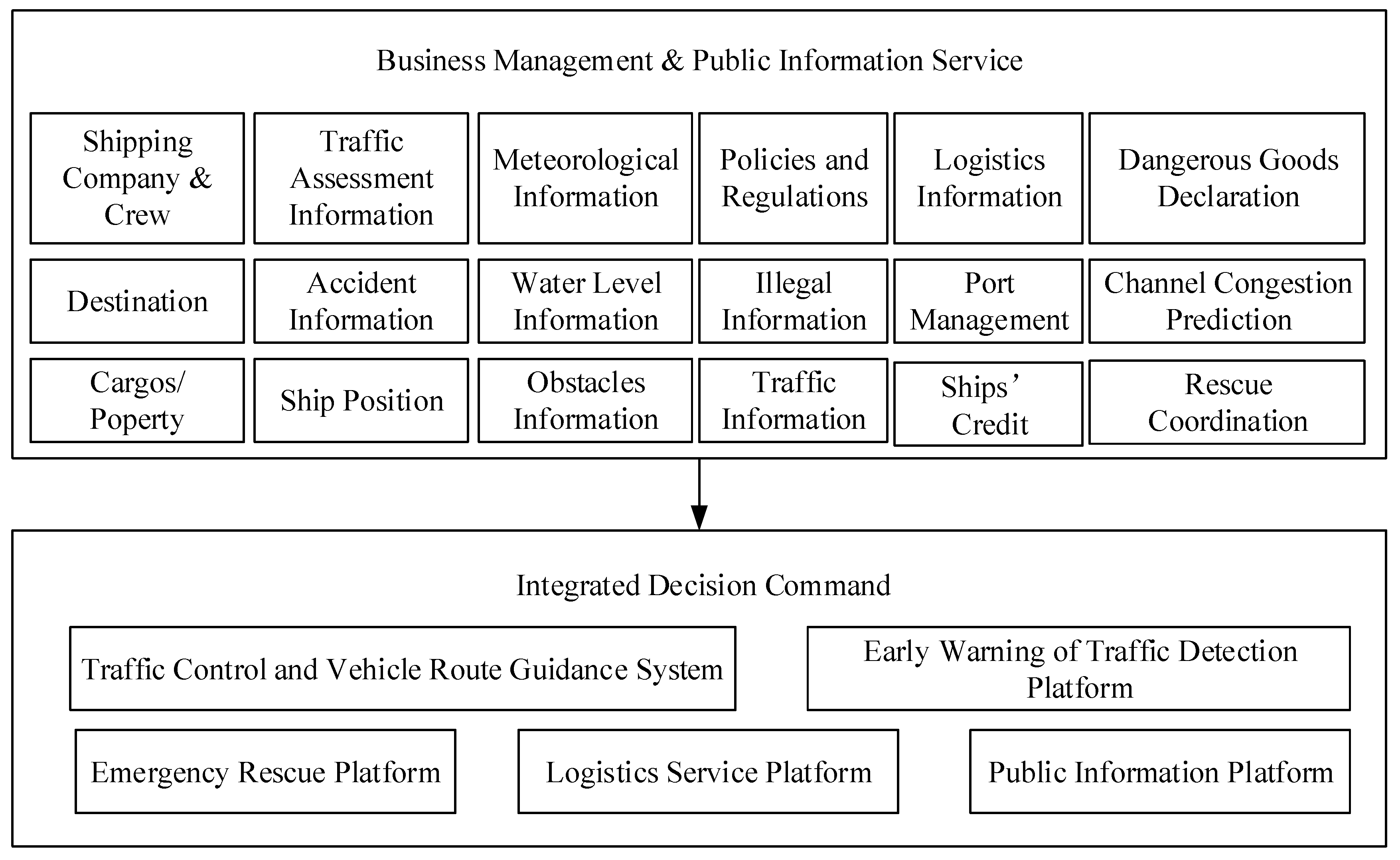
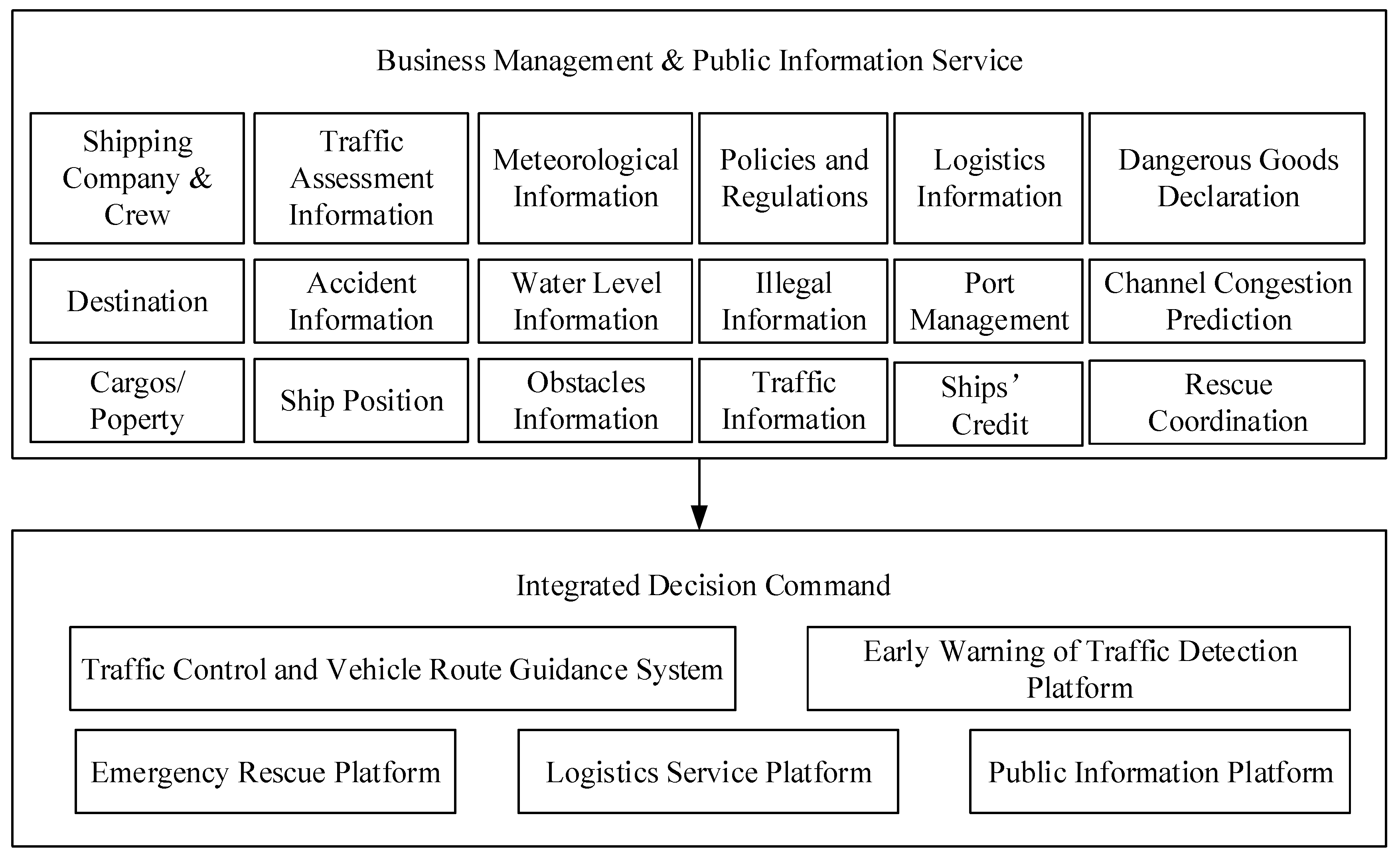
2.5. The Technical Architecture of the Application Layer
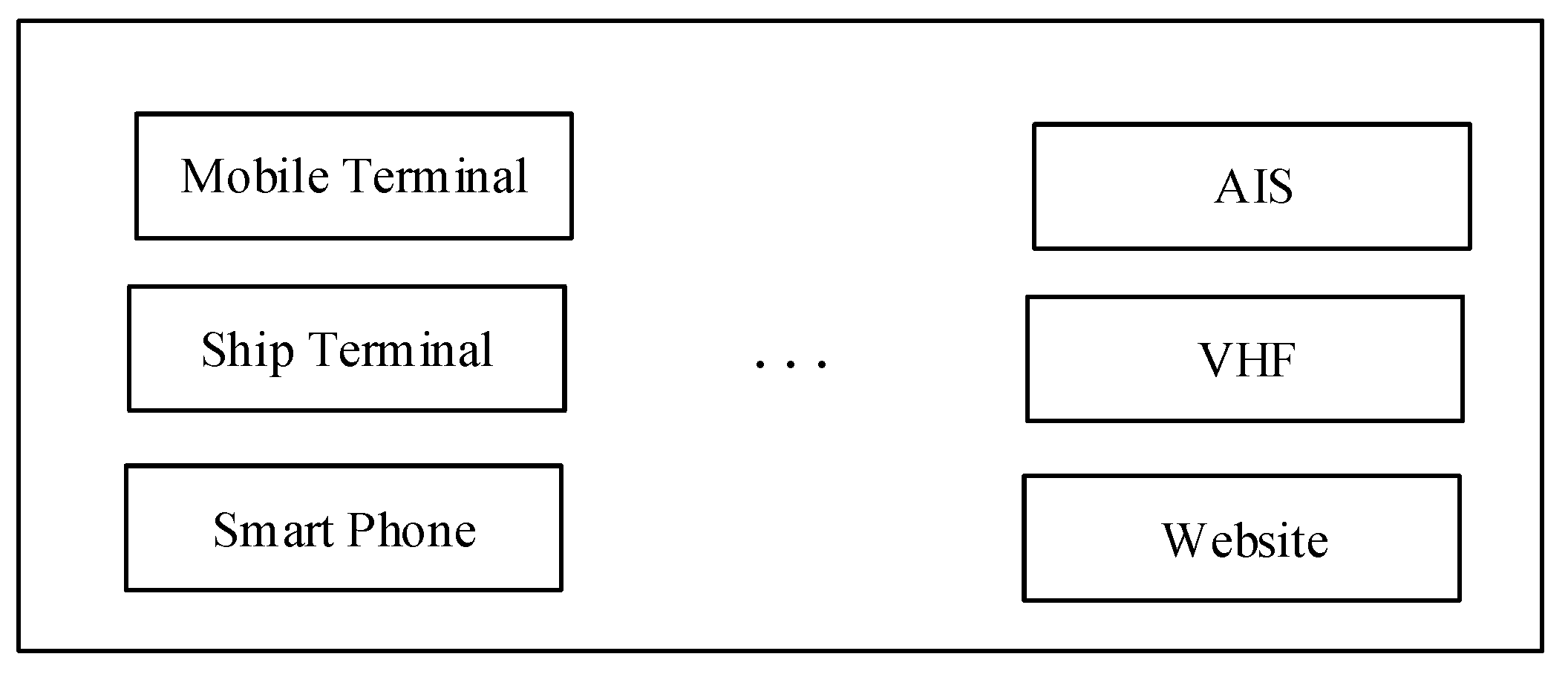
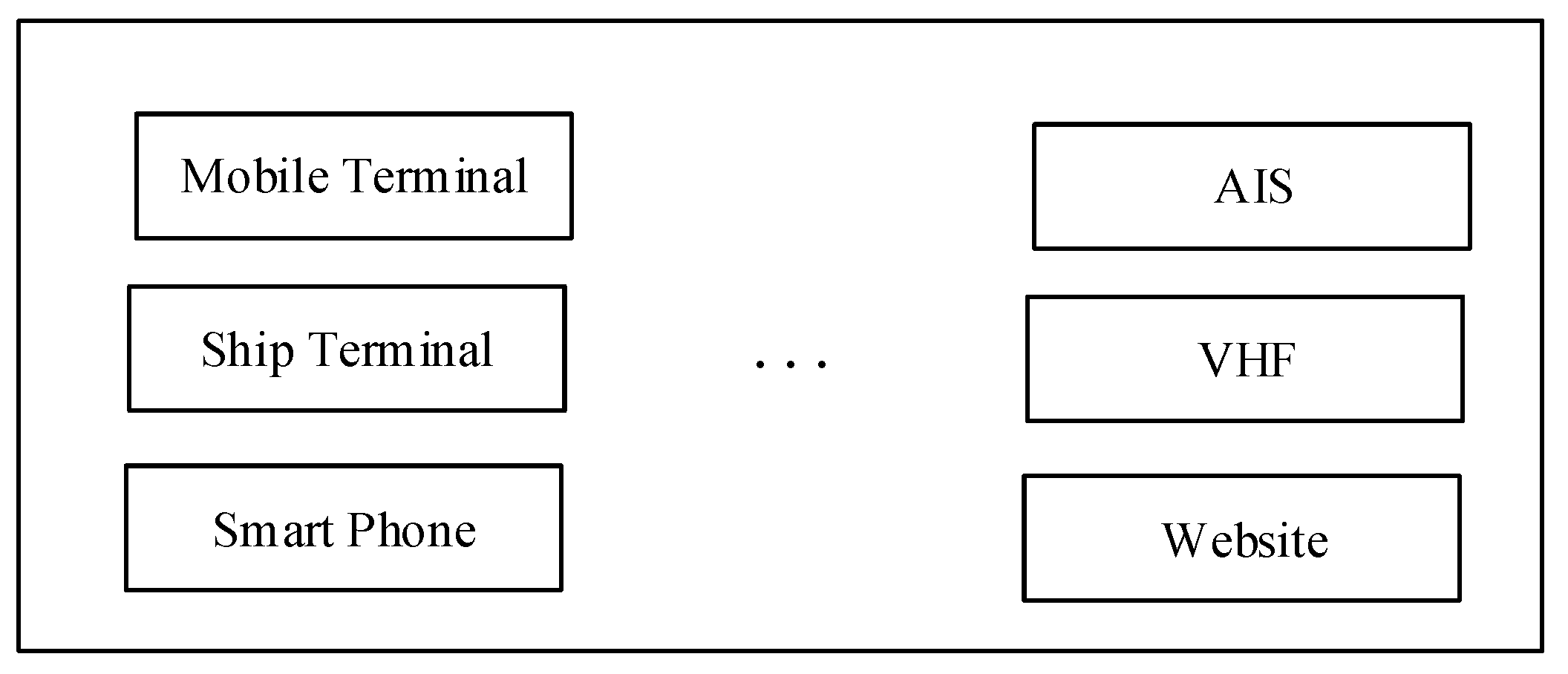
2.6. The Technical Architecture of the Exhibition Layer
3. Characteristics of the Internet of Vessels
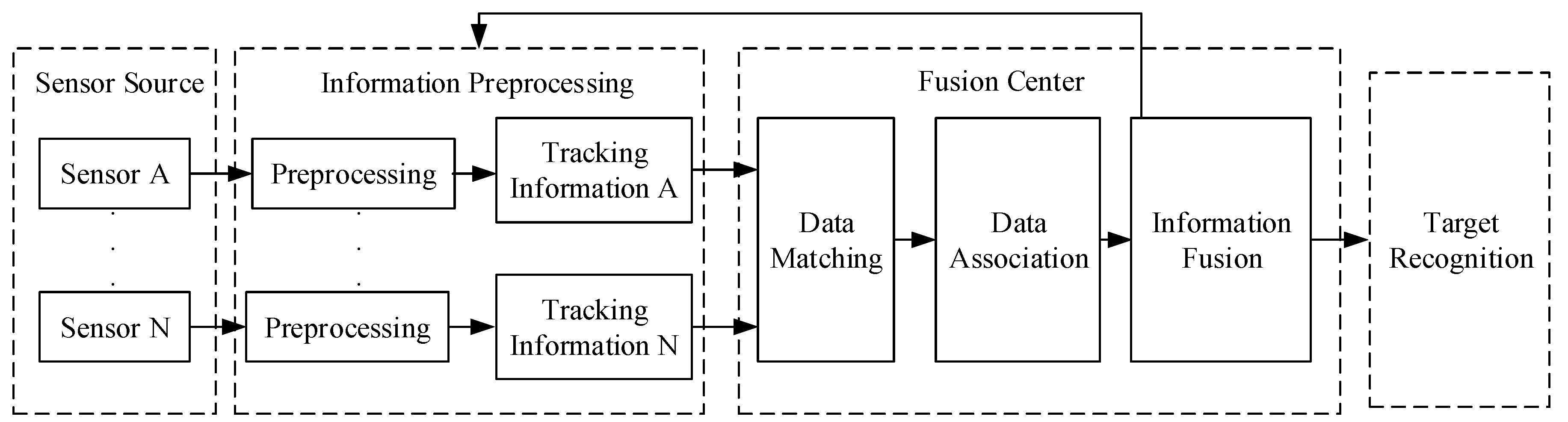
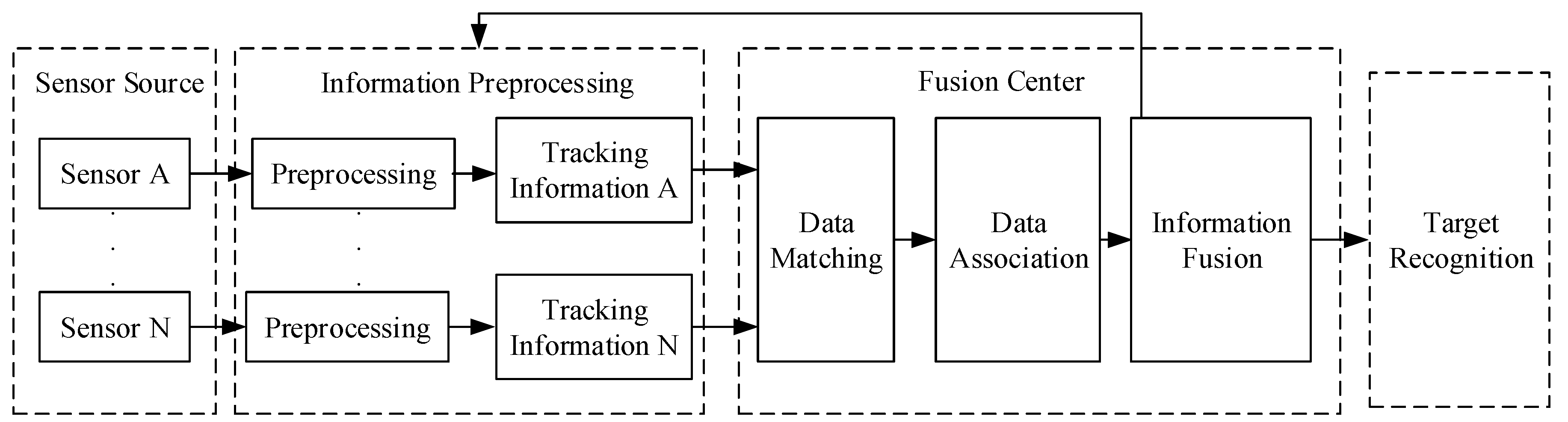
3.1. Information Processing and Information Fusion
3.2. Data Analysis Methods
- (1)
- The deep learning approach usually uses the artificial neural network method. Based on the multi-layered framework, this method could analyze and express the data. Taking advantage of data volume from the big data platform, it can use a more complicated model to represent the data effectively. Now this method is widely applied in the prediction of ship operation [54], collision warning [55] and risk analysis [56]. Zhao [54] took the turning performance of a single screw ship as an example to establish a mathematical model based on the artificial neural network. As was known, when the ship conditions (loading, oil consumption, speed, trim angles and heel angles) and the environment (wind, waves, water flow, offshore voyage) changed, the characteristics of ship operation would change at the same time. Based on the big data from the IoV system, the artificial neural network was trained to meet the predicted requirement for the ship’s operation. According to the experiment with the real ship, the reliability of this method was verified. Lu [55] established a kind of collision risk evaluating model by the neural network. Due to the big data analysis, the collision risk model obtained good results and could provide a reference for increasing the safety of the ship.
- (2)
- The knowledge calculation method extracts valuable knowledge from the big data platform to construct searchable and computable knowledge bases that include knowledge base construction, integration of multiple knowledge and knowledge update. The integration of multi-knowledge considers the sharing and reusing of knowledge and improves the real time and effectiveness of the data. This method is widely applied in the VTS [57], ship navigation [58] and decisions regarding energy consumption for ships [59]. Zbigniew [60] developed a kind of information system supporting navigational decision making. Information was acquired in the information acquisition mode and then the situation analysis would calculate and process the data. With the results of the knowledge calculation, the system made a good choice and took action to help the ship avoid collision. Mladineo [61] studied a multi-criteria analysis-based decision support system developed for the management of incidents in maritime traffic. The decision support system organized a variety of information data related to emergency management—spatial data, radar data, weather data and GIS data—for the administrator, in a comprehensible and user-friendly way. It used the preference ranking organization method for enrichment evaluations (PROMETHEE) for treating the multi-criteria problem. A case on the east coast of the Adriatic Sea was studied to indicate that this method was more understandable and effective.
- (3)
- The visualization method, according to the interactive information display and high dimensional dynamic information, can make a decision in real time. Taking advantage of the visualization method, the ships’ traffic flow model is built to master the state of the ship traffic flow, to display the degree of channel crowding in a visualization, to assess the security risks and to give early warning of the security information [62]. Based on the big data, Robin [54] described the advantage of the description and illustration being used to present the information. With the description and illustration, the decision maker could be provided with the most essential and salient aspect of a given analysis quickly. Similarly, when this method was used in the IoV system, the administrators would judge the case in a direct way, and make a quick response for alarm and emergency. Meanwhile, it was also a good way to alleviate the traffic in the inland rivers or in the ports.
4. Applications and Benefits of the IoV
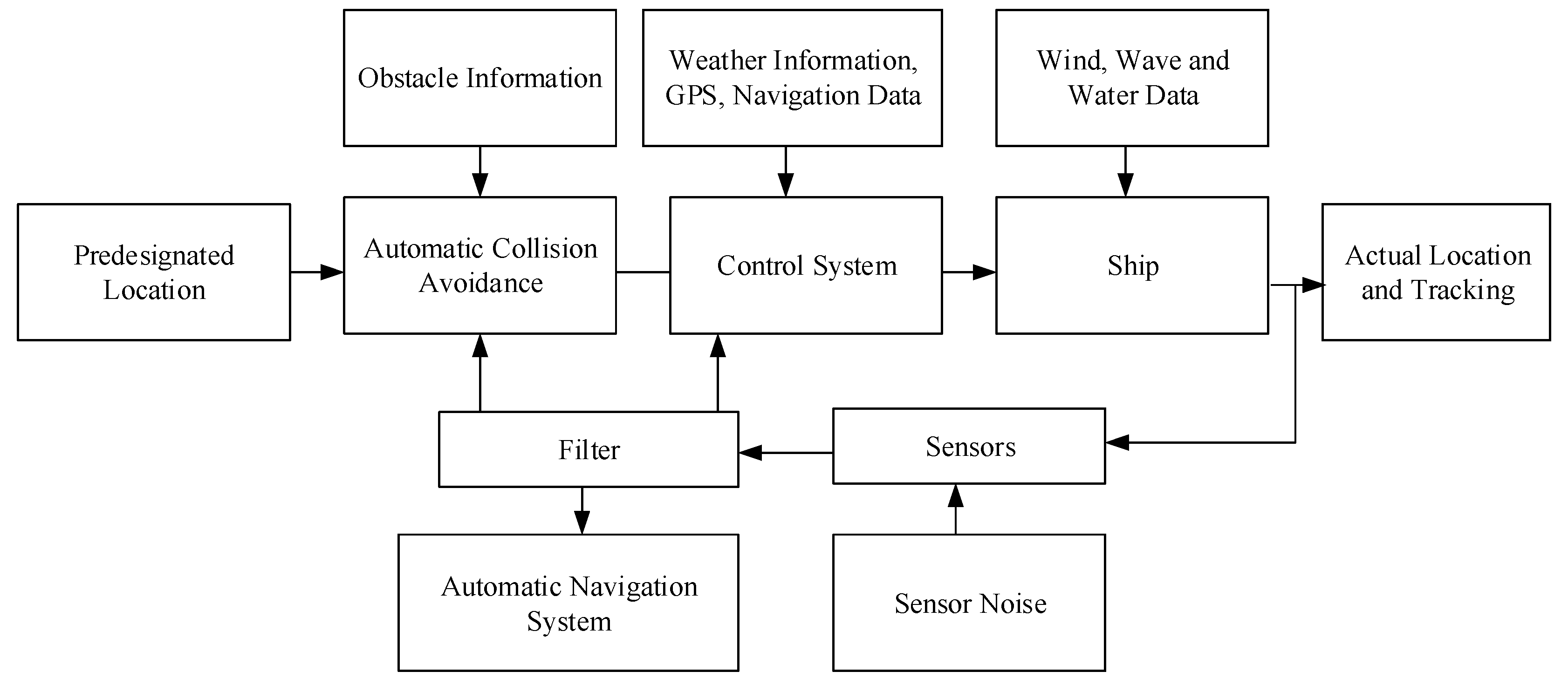
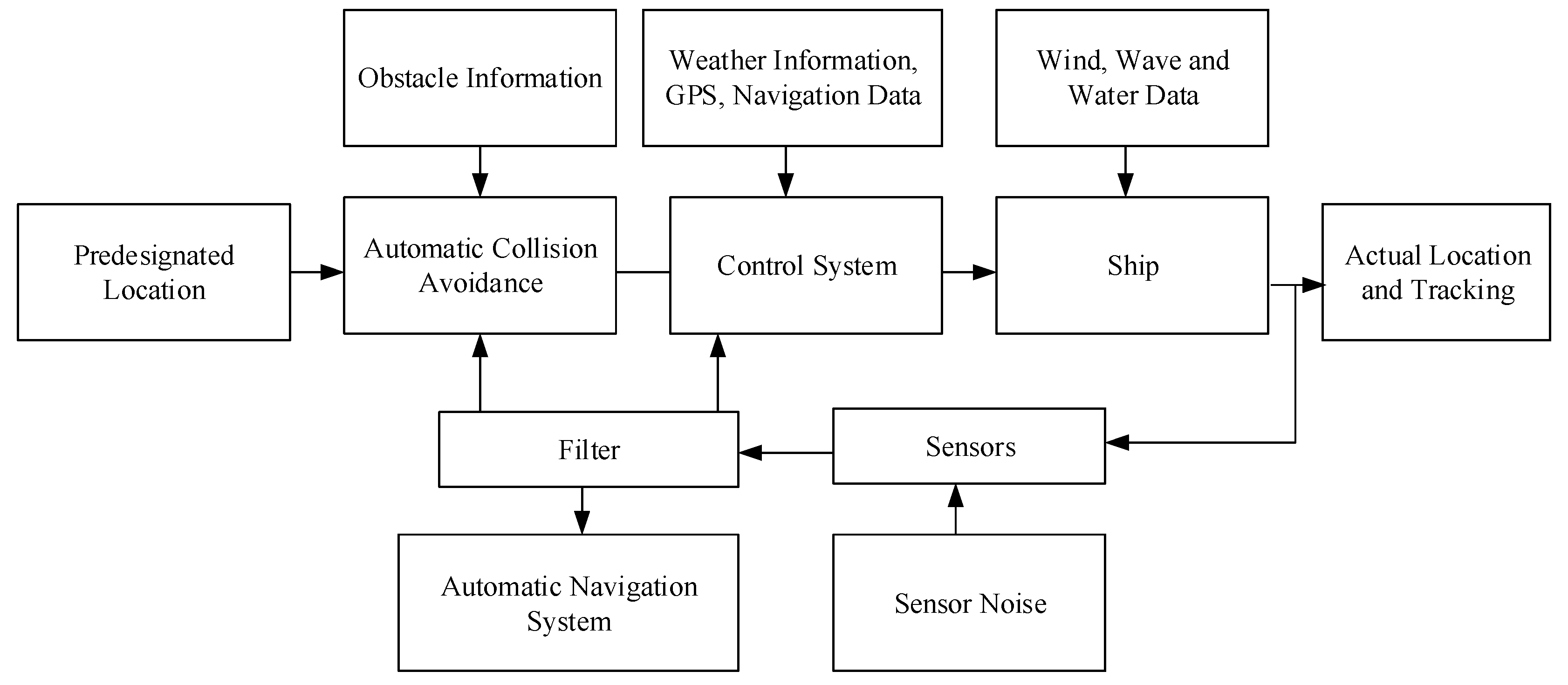
4.1. Intelligent Navigation of Ships
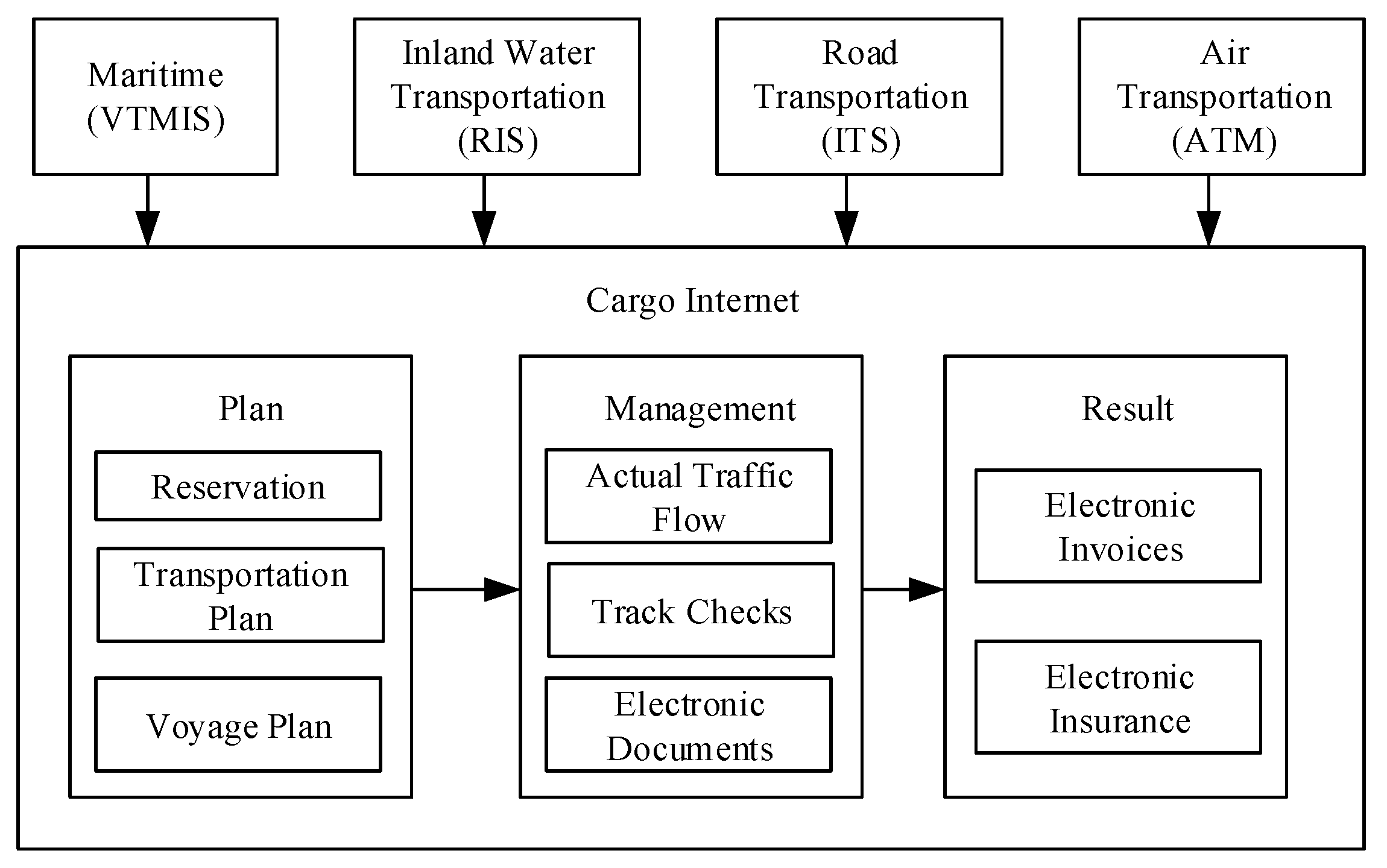
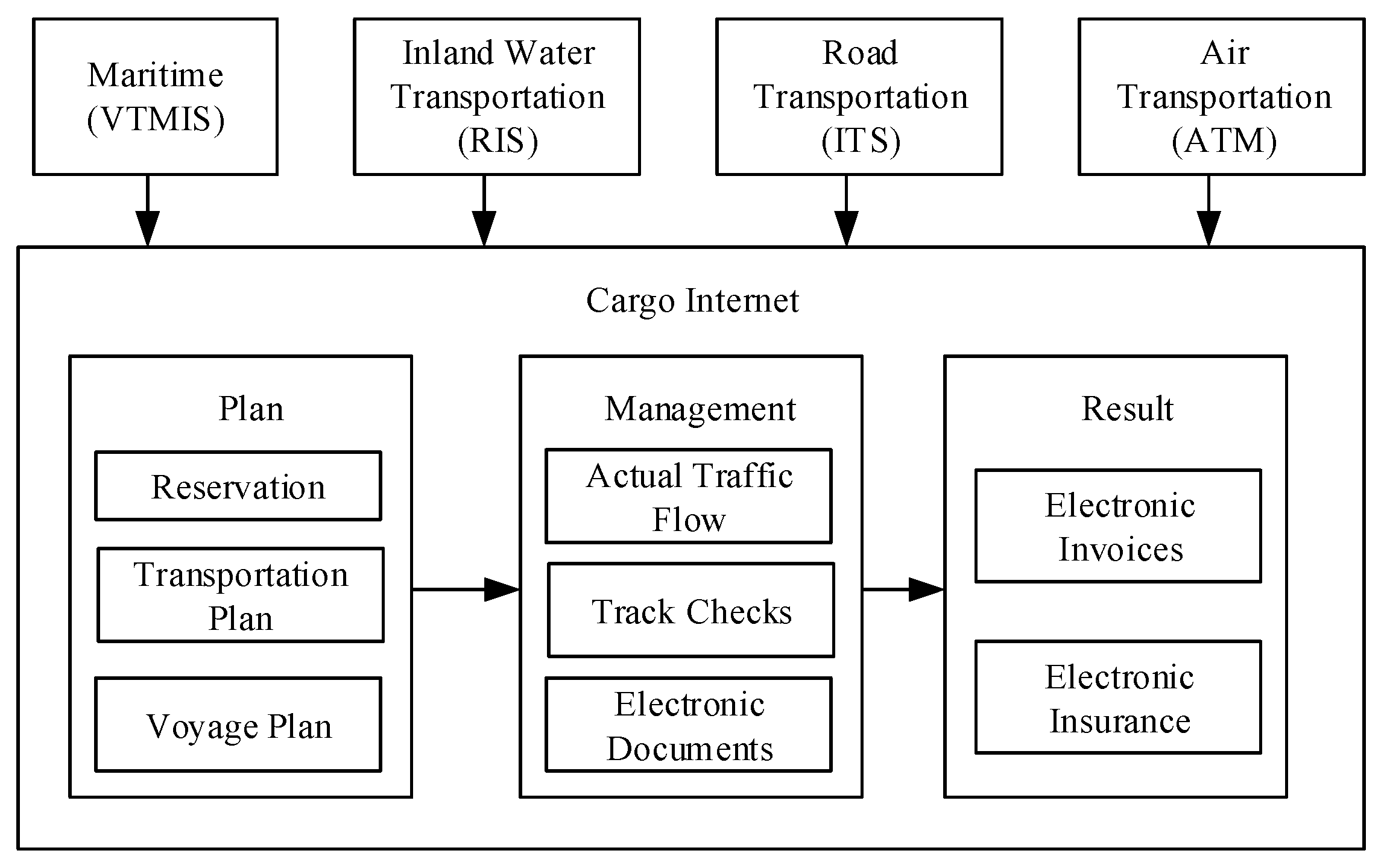
4.2. Intelligent Management and Service of Vessels
4.3. Traffic Flow Prediction
5. Challenges and Prospects
5.1. Challenges of the IoV System
5.1.1. Safety Mechanism
5.1.2. The Limit of Transmission for the Waterway Traffic Information
- (1)
- (2)
- (3)
- When the ships sail in different regions, the information will be transferred across these regions. If the business systems in these regions do not support each other, it is a barrier for the information sharing and information efficiency.
5.2. Prospects of the IoV System
6. Conclusions
- (1)
- Exchange ability of data fusion of heterogeneous networks in water transport,
- (2)
- Intelligent ship management and service techniques,
- (3)
- Intelligent control techniques for real-time practical usage,
- (4)
- Cross-regional information integration and resource management in IoV,
- (5)
- Information security protection for large scale ship network communication systems,
- (6)
- The application of new generation wireless communication technology.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Qin, W.M.; Wang, X.F. A survey on netting with Internet of Vessels. Navig. China 2015, 38, 1–4. [Google Scholar]
- Liu, C.G.; Chu, X.M.; Xie, S.; Yan, X.P. Review and prospect of ship intelligent. Ship Eng. 2016, 38, 77–84. [Google Scholar]
- Preece, A.; Decker, S. Intelligent web services. IEEE Intell. Syst. 2002, 17, 15–17. [Google Scholar] [CrossRef]
- Oberheim, C.; Heinz, M.; Steinhuber, L.; Blesenkemper, J. Status of RIS in Germany part 1: New information systems for inland navigation in Germany. In Proceedings of the 30th PIANC-AIPCN Congress 2002, Sydney, Australia, 22–26 September 2002; pp. 1957–1966. [Google Scholar]
- Vallant, J.; Hofmann-Wellenhof, B. River information services. Elektrotechnik Informationstechnik 2008, 125, 239–243. [Google Scholar] [CrossRef]
- Zhou, J.H.; Zhang, F.J.; Gong, Y.P.; Zhang, Y. Data exchange research and thinking of the Europe inland river shipping integrated information service system. China Water Trans. 2011, 11, 83–85. [Google Scholar]
- Racetin, I. Croatian river information services. In Proceedings of the International Cartographic Conference, Santiago, Chile, 15–21 November 2009. [Google Scholar]
- Svetlana, M.; Milan, M.; Ivan, S. European policy for the promotion of inland waterway transport: A case study of the Danube River. Afr. J. Bus. Manag. 2012, 6, 2498–2507. [Google Scholar]
- Luo, B.C.; Xie, Y.L. An overview of the Europe inland river shipping integrated information service system. Ship Manag. 2007, 29, 37–39. [Google Scholar]
- European Communities. White Paper European Transport Policy for 2010: Time to Decide; Office for Official Publications of the European Communities: Luxembourg, 2001; ISBN 9789289403412. [Google Scholar]
- Kazimierski, W.; Wawrzyniak, N. Exchange of navigational information between VTS and RIS for inland shipping usere needs. In Proceedings of the 14th International Conference on Transport Systems Telematics, Katowice, Poland, 22–25 October 2014. [Google Scholar]
- Dong, Y.H.; Sun, W.; Dong, L.H.; Zhang, C.L. On construction of Internet of Ships. Prot. Waterw. Eng. 2012, 469, 145–149. [Google Scholar]
- Dai, M. The Key Technologies Research of Vessels Connected to Internet Information Perception and Interaction in Yangtze River Delta. Ph.D. Thesis, Chang’an University, Xi’an, China, 2016. [Google Scholar]
- Wang, T.C.; Xie, Y.Z.; Yan, H. Research of multi sensor information fusion technology based ono extension neural network. Math. Model. Eng. Probl. 2016, 3, 129–134. [Google Scholar] [CrossRef]
- Yang, L. Research on fusion technology of fuzzy system and neural network. In Proceedings of the 5th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2017), Beijing, China, 25–26 March 2017. [Google Scholar] [CrossRef]
- Xiang, M.; Wang, T.T.; Luo, Z.Y.; Cai, L.Q.; Huang, J.J.; Hou, X.Z. Design of test platform for electricity information collection system based on multi-network fusion technology. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013. [Google Scholar] [CrossRef]
- Bai, K. Reseasrch on Internet of Ships RFID Data Process. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2013. [Google Scholar]
- Zhou, L.D.; Haas, Z.J. Securing ad hoc networks. IEEE Netw. 1999, 13, 24–30. [Google Scholar] [CrossRef]
- Arun Kunmar, B.R.; Reddy, L.C.; Hiremath, P.S. Performance comparison of wireless mobile ad-hoc network routing protocols. Int. J. Comput. Sci. Netw. Secur. 2008, 8, 337–343. [Google Scholar]
- Huang, Y. A Terminal Display System of Maritime Communication Based on Ad Hoc Network. Master’s Thesis, Dalian Maritime University, Dalian, China, 2010. [Google Scholar]
- Zhou, J.Y. The application on ad hoc network in ship communication terminal system. Ship Sci. Technol. 2016, 38, 103–105. [Google Scholar]
- Chen, H.Y. Investigation on TORA Routing Protocol in Ad Hoc Networks and Its Improvement. Master’s Thesis, Hubei University, Wuhan, China, 2013. [Google Scholar]
- Frank, K.; Stefan, S.; Andreas, K.; Alfred, G.; Michael, W. Securing ad hoc routing protocols. In Proceedings of the EUROMICRO Conference, Rennes, France, 31 August–3 September 2004; p. 519. [Google Scholar]
- Joytom. Available online: http://www.joytom.cpooo.com/news/17201.html (accessed on 6 July 2009).
- Yang, Y.X. Progress, contribution and challenges of Compass/Beidou Satellite Navigation System. Acta Geod. Cartogr. Sin. 2010, 39, 1–6. [Google Scholar]
- Hu, G.; Ma, X.; Fan, Q.Y. The applications of Compass Navigation Satellite System to marine fishing industry. Fish. Mod. 2010, 37, 60–62. [Google Scholar]
- Osseiran, A.; Boccardi, F.; Braaun, V. Scenarios for 5G mobile and wireless communications: The vision of the METIS project. IEEE Comput. Mag. 2014, 52, 26–35. [Google Scholar] [CrossRef]
- Wu, J.; Chen, Y.B.; Zhong, B.; Zhou, G. Design of ship’s data transmission device based on GPRS network. Mar. Electron. Eng. 2015, 35, 55–59. [Google Scholar]
- Xu, Y.M. The Research and Design of Remote Monitoring System of a Boat Equipment Data Based on 3G Technology. Master’s Thesis, Dalian Maritime University, Dalian, China, 2013. [Google Scholar]
- Tang, X.Y. Application of 4G communication technology in ship navigation information system. Ship Sci. Technol. 2014, 36, 148–151. [Google Scholar]
- Waleed, E.; Alagan, A.; Muhammad, A.L. Internet of Things (IoT) in 5G wireless communications. IEEE Access 2016, 4, 10310–10314. [Google Scholar] [CrossRef]
- Pelusi, L.; Passarella, A.; Conti, M. Opportunistic networking: Data forwarding in disconnected mobile ad hoc networks. IEEE Comput. Mag. 2006, 44, 131–141. [Google Scholar] [CrossRef]
- Liu, C.H.; Xue, F. Network coding for two-way relaying: Rate region, sum rate and opportunistic scheduling. In Proceedings of the IEEE International Conference on Communications, Beijing, China, 19–23 May 2008. [Google Scholar]
- Zhang, Z.; Greiner, A.; Taktak, S. A reconfigurable routing algorithm for a fault-tolerant 2D-Mesh Network-on-Chip. In Proceedings of the IEEE 45th ACM/IEEE Design Automation Conference, Anaheim, CA, USA, 8–13 June 2008. [Google Scholar]
- Chen, W.; Letaief, K.B.; Cao, Z. Opportunistic network coding for wireless networks. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007. [Google Scholar]
- Fall, K.; Farrell, S. DTN: An architectural retrospective. IEEE J. Sel. Areas Commun. 2008, 26, 828–836. [Google Scholar] [CrossRef]
- Scott, K.; Burleigh, S. Bundle Protocol Specification. Available online: http://tools.ietf.org/html/rfc5050S (accessed on 21 May 2016).
- Meranim, D.; Berni, A.; Potter, J.; Martins, R. An underwater convergence layer for disruption tolerant networking. In Proceedings of the Baltic Conference on Future Internet Communications (BCFIC 2011), Riga, Latvia, 16–18 February 2011. [Google Scholar]
- Berger, C.R.; Zhou, S.; Preisig, J.C. Sparse channel estimation for multicarrier underwater acoustic communication: From subspace methods to compressed sensing. IEEE Trans. Signal Process. 2009, 58, 1708–1721. [Google Scholar] [CrossRef]
- Hu, Y.X.; Ma, X.N.; Zheng, L.J. Research of data management in IOT. Internet Things Technol. 2014, 4, 79–82. [Google Scholar]
- Dai, M.; Duan, J.; Qian, S. Research on the overall technical framework of the ship networking system in the Yangtze River Delta. In Proceedings of the 2017 2nd International Conference on Information Technology and Management Engineering (ITME 2017), Beijing, China, 15–16 January 2017. [Google Scholar]
- Stietencron, M.V.; Rostad, C.C.; Henriksen, B.; Thoben, K.D. Utilising the Internet of Things for the management of through-life engineering services on marine auxiliaries. In Proceedings of the 5th International Conference on Through-Life Engineering Services, Cranfield, UK, 1–2 November 2016. [Google Scholar]
- Gubbi, J.; Buyya, R.; Marusic, S. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Guo, M.; Wei, F. Research on key technologies of information fusion based on the marine network. Ship Sci. Technol. 2016, 38, 103–105. [Google Scholar]
- Wang, F.; Hu, L.; Zhou, J. A semantics-based approach to multi-source heterogeneous information fusion in the internet of things. Soft Comput. 2017, 21, 2005–2013. [Google Scholar] [CrossRef]
- Yang, X.B.; Zhang, W.Q.; Wu, X.R.; Zhu, L.; Zheng, X. A heterogeneous ship formation network selection algorithm based on service level and load balance. In Proceedings of the 2015 International Conference on Communications, Signal Processing, and Systems, Chengdu, China, 23–24 October 2015. [Google Scholar]
- Lv, Z. Multi-Source Information Fusion Technology and Its Application. Master’s Thesis, North China Electric Power University, Beijing, China, 2011. [Google Scholar]
- Yu, J. Research on the Key Technology of VTS and AIS Information Fusion in the Internet of Inland Ships. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2013. [Google Scholar]
- Wang, T.T. Research on Fusion Algorithm of AIS and Radar Dynamic Data. Master’s Thesis, Dalian Maritime University, Dalian, China, 2012. [Google Scholar]
- Borkowski, P. The ship movement trajectory prediction algorithm using navigational data fusion. Sensors 2017, 17, 1432. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, Y.; Song, S.Q. Use of Internet of Things for ship management of inland rivers. In Proceedings of the 2013 Second International Conference on Transportation Information and Safety, Wuhan, China, 29 June–2 July 2013. [Google Scholar]
- Lazarowska, A. Ship’s trajectory planning for collision avoidance at sea based on ant colony optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, M.; Liao, X.F. Big data applications: A survey. J. Comput. Res. Dev. 2013, 50, 216–233. [Google Scholar]
- Zhao, X.J.; Xiong, W.H. Ship maneuverability prediction based on modified BP neural network. J. SSSRI 2006, 29, 48–51. [Google Scholar]
- Lu, Z.Y. Gnetic neural network algorithm in the application of determining collision risk. Ship Sci. Technol. 2016, 38, 85–87. [Google Scholar]
- Alyami, H.; Yang, Z.L.; Riahi, R.; Bonsall, S.; Wang, J. Advanced uncertainty modelling for container port risk analysis. Accid. Anal. Prev. 2016. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.D. The Application of Multi-Source Information Fusion Technology in VTS. Master’s Thesis, Dalian Maritime University, Dalian, China, 2014. [Google Scholar]
- Wang, P. The Technology Research of Ship Integrated Navigation Multi-Source Information Fusion. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2014. [Google Scholar]
- Xia, R.F.; Wan, L.J. Decision support system of ship energy consumption based on knowledge fusion. Ship Eng. 2014, 36, 166–169. [Google Scholar]
- Zbigniew, P.; Piotr, W.; Piotr, B. Decision support in collision situations at sea. J. Navig. 2016, 70, 447–464. [Google Scholar]
- Mladineo, N.; Mladineo, M.; Knezic, S. Web MCA-based decision support system for incident situations in maritime traffic: Case study of Adriatic Sea. J. Navig. 2017, 70, 1–23. [Google Scholar] [CrossRef]
- Hogarth, R.M.; Soyer, E. Using simulated experience to make sense of big data. MIT Sloan Manag. Rev. 2015, 56, 49–54. [Google Scholar]
- Kawaguchi, A.; Inaishi, M.; Kondo, H.; Kondo, M. Towards the development of intelligent navigation support systems for group shipping and global marine traffic control. IET Intell. Transp. Syst. 2009, 3, 257–267. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Guedes Soares, C. Autonomous guidance and navigation based on the COLREGs rules and regulations of collision avoidance. In Proceedings of the Advanced Ship Design for Pollution Prevention, Split, Croatia, 23–24 November 2009; pp. 205–216. [Google Scholar]
- Kao, S.L.; Lee, K.T.; Chang, K.Y. A fuzzy logic method for collision avoidance in Vessel Traffic Service. J. Navig. 2007, 60, 17–31. [Google Scholar] [CrossRef]
- Wen, C.H.; Hsu, P.Y.; Wang, C.Y.; Wu, T.L. Identifying Smuggling Vessels with Artificial Neural Network and Logistics Regression in Criminal Intelligence Using Vessels Smuggling Case Data; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wijaya, W.M.; Nakamura, Y. Predicting ship behavior navigating through heavily trafficked fairways by analyzing AIS data on apache HBase. In Proceedings of the IEEE 2013 First International Symposium on Computing and Networking, Matsuyama, Japan, 4–6 December 2013. [Google Scholar]
- Yan, X.P.; Liu, C.G. Review and prospect for intelligent waterway transportation system. CAAI Trans. Intell. Syst. 2016, 11, 807–817. [Google Scholar]
- Schilk, G.; Seemann, L. Use of its technologies for multimodal transport operations—River information services (RIS) transport logistics services. Procedia Soc. Behav. Sci. 2012, 48, 622–631. [Google Scholar] [CrossRef]
- Li, M.W.; Han, D.F.; Wang, W.L. Vessel traffic flow forecasting by RSVR with chaotic cloud simulated annealing genetic algorithm and KPCA. Neuralcompting 2015, 157, 243–255. [Google Scholar] [CrossRef]
- Liu, J.X.; Zhang, T.; Liu, W. Research on combination forecasting method for ship traffic flow. Navig. China 2009, 32, 80–84. [Google Scholar]
- Xu, W.X.; Chu, X.M.; Chen, X.Q. Methods of generating vessels for traffic flow simulation of bridge areas waterway. J. Syst. Simul. 2014, 26, 1644–1651. [Google Scholar]
- Suo, H.; Wan, J.F. Security in the Internet of Things: A review. In Proceedings of the IEEE 2012 International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012. [Google Scholar]
- Li, S.C.; Tryfonas, T.; Li, H.L. The Internet of Things: A security point of view. Internet Res. 2016, 26, 337–359. [Google Scholar] [CrossRef]
- Zhou, S.L. The Coverage Control Schemes for Maritime Sensor Networks Based on Nodes Cooperative Scheduling. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2014. [Google Scholar]
- Yin, Y.; Gong, Y.; Geng, X.F. Research on the safety protection technology of larger ship-shore communication. Electron. Tech. Softw. Eng. 2014, 10, 98–99. [Google Scholar]
- Dai, M.; Zhong, N. The technical analysis and thinking of network fusion in the IoV communication for the inland river in China. Transp. Constr. Manag. 2012, 7, 96–97. [Google Scholar]
- Ye, N.; Wang, Z.-Q.; Lin, Q.; Wang, R.-C. A Method for Driving Route Predictions Based on Hidden Markov Model. Math. Probl. Eng. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Prinsloo, J. Accurate Vehicle Location System Using RFID, an Internet of Things Approach. Sensors 2016, 16, 825. [Google Scholar] [CrossRef] [PubMed]
- Ye, N.; Wang, Z.-Q.; Zhang, Y.-Y.; Wang, R.-C. A Method of Vehicle Route Prediction Based on Social Network Analysis. J. Sens. 2015, 15, 1–10. [Google Scholar] [CrossRef]
- Jin, X.; Shao, J.; Zhang, X.; An, W.; Malekian, R. Modeling of nonlinear system based on deep learning framework. Nonlinear Dyn. 2016, 84, 1327–1340. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perceiving Object | Perceiving Contents | Perceiving Object | Perceiving Contents |
|---|---|---|---|
| Channels | Water-level Information | Ship Locks | Open Time of Locks |
| Real-time Meteorological Information | Cargos Information | ||
| Regional Geographic Information | Traffic Conditions | ||
| Channel Obstruction | Time Span Arriving Sites | ||
| River and Canal Status | Estimated Time of Departure | ||
| Auxiliary Facilities Status | Estimated Time of Arrival | ||
| Channel Congestion Information | Short-term Planning of Locks | ||
| Emergency Accident Information | Long-term Planning of Ships | ||
| Ports | Docking Information | Intersections | Direction of Channels |
| Ships’ Waiting Spot | Inland Riverway Service Center | Type of Service | |
| Cargos Information | Number of Service Center | ||
| Dock Operation Status | Marine Service Station | Position of Service Station | |
| Port Congestion Information | Queuing Number of Ships | ||
| Estimated Time of Arrival | Refuse Collection Point | Position of Service Station | |
| Traffic Information | Queuing Number of Ships | ||
| Ships | Position Information | Bridges | Capacity Information |
| Speed Information | Cargos Information | ||
| Certification Information | Estimated Time of Arrival | ||
| Payment Information | Estimated Time of Departure | ||
| Illegal Traffic Information | Traffic Information | ||
| Visa Information for Destination | Short-term Planning of Locks | ||
| Loading Information | Long-term Planning of Ships | ||
| Draft Information | Short-term Planning of Bridges | ||
| Owner of Vessels Information | Long-term Planning of Bridges | ||
| Owner of Cargos Information | Open Time of Bridges |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Z.; Liu, F.; Li, Z.; Malekian, R.; Xie, Y. The Development of Key Technologies in Applications of Vessels Connected to the Internet. Symmetry 2017, 9, 211. https://doi.org/10.3390/sym9100211
Tian Z, Liu F, Li Z, Malekian R, Xie Y. The Development of Key Technologies in Applications of Vessels Connected to the Internet. Symmetry. 2017; 9(10):211. https://doi.org/10.3390/sym9100211
Chicago/Turabian StyleTian, Zhe, Fushun Liu, Zhixiong Li, Reza Malekian, and Yingchun Xie. 2017. "The Development of Key Technologies in Applications of Vessels Connected to the Internet" Symmetry 9, no. 10: 211. https://doi.org/10.3390/sym9100211
APA StyleTian, Z., Liu, F., Li, Z., Malekian, R., & Xie, Y. (2017). The Development of Key Technologies in Applications of Vessels Connected to the Internet. Symmetry, 9(10), 211. https://doi.org/10.3390/sym9100211