Abstract
We define the operation of Petrie duality for maps, describing its general properties both geometrically and algebraically. We give a number of examples and applications, including the construction of a pair of regular maps, one orientable of genus 17, the other non-orientable of genus 52, which embed the 40-vertex cage of valency 6 and girth 5 discovered independently by Robertson and Anstee. We prove that this map (discovered by Evans) and its Petrie dual are the only regular embeddings of this graph, together with a similar result for a graph of order 40, valency 6 and girth 3 with the same automorphism group.
MSC classifications:
05C10; 05E18; 20B25
1. Introduction
Anyone who has studied the theory of maps on surfaces, or that of polytopes, will be familiar with the classical duality operation D, which transposes the roles of vertices and faces. It leaves the underlying surface of a map invariant, preserving such properties as orientability, genus and boundary components, so it is very useful when studying maps on a given surface. It also preserves the automorphism group of a map, so it is even more useful when studying the most symmetric maps: these are the regular maps, those maps for which the automorphism group acts transitively (and hence regularly) on flags.
This duality operation is less useful when one studies the regular embeddings of a given graph, or family of graphs, since it may (and often does) change the graph embedded by a map. In this situation, there is a more useful but slightly less well-known duality operation, called the Petrie duality P, which has the advantage of preserving the embedded graph. The aim of this note is to define this operation, to describe a little of its history and its general properties, and to show its effectiveness by using it to study some regular graphs which have arisen in a purely graph-theoretic context, namely that of cages.
The cage of valency 6 and girth 5, that is, the smallest graph with these parameters, was described by Robertson in his thesis [1], and was subsequently independently discovered by Anstee [2], Evans [3], and O’Keefe and Wong [4]. This graph, which has 40 vertices, has been further studied by Klin, Muzychuk and Ziv-Av [5], and by Wong [6], the latter giving a proof of its uniqueness. Following [5] we will call this the Anstee–Robertson graph, and denote it by .
Evans [3] showed that can be embedded in an orientable surface as a map with pentagonal faces. Our aim here is to show that this map , which we will call the Evans map, is a regular map of genus 17, a double covering of the regular map of genus 9 described by Coxeter and Moser in Section 8.6 and Table 8 of [7]; we will also describe the Petrie dual of , a regular embedding of with octagonal faces on a non-orientable surface of genus 52. We will prove in Theorem 2 that these are the only regular maps which embed this graph, together with a similar result (Corollary 3) for another graph of order 40 and valency 6 (but girth 3) which has the same automorphism group as . We will also consider various quotients of and , showing that they are isomorphic to various maps which have already appeared in the literature.
2. The Petrie Dual of a Map
One can think of a map as a road-map, with edges representing roads, and vertices representing roundabouts. One can then travel around each face by starting a journey along one edge, and consistently turning first left at each vertex. Even if the surface is non-orientable, one can carry a local orientation along the edges, so that “first left” is always well-defined. Replacing “first left” with “first right” gives the other face incident with the initial edge (in some cases these two faces may coincide).
Suppose that instead we decide to turn alternately first left and first right, following a zigzag path through the map. In a finite map, such a path must eventually close up, giving what is called a Petrie polygon. (Coxeter [8] named these polygons after his lifelong friend, the geometer John Flinders Petrie (1907–1972), who was the son of the great Egyptologist Sir William Flinders Petrie.) As in the case of faces, each edge is in general contained in two Petrie polygons, depending on whether one starts by turning left or right, but again there are examples in which the two polygons coincide.
The Petrie dual of a map is the map formed by retaining the vertices and edges of , but removing its faces, and replacing them with new faces bounded by the Petrie polygons of . Thus the embedded graph is unchanged, but the surface may be totally different.
For example, if we regard the tetrahedron as a map on the sphere, with four triangular faces, then its Petrie polygons have length 4: one is indicated with thick red lines in the map on the left of Figure 1. Then is a map on the real projective plane, with three quadrilateral faces. It is, in fact, the antipodal quotient of the cube, as shown on the right in Figure 1, where antipodal points on the boundary of the disk, shown as a broken line, are identified. Note that in both cases the embedded graph is the complete graph , and the automorphism group of the map is isomorphic to , acting naturally on the four vertices.
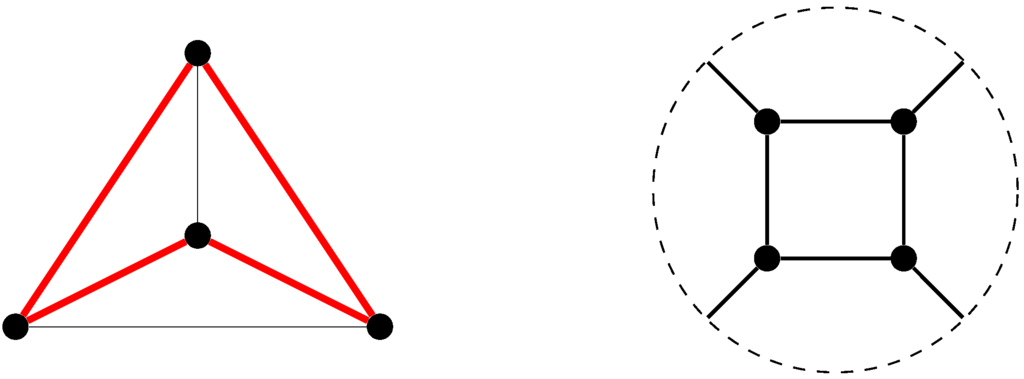
Figure 1.
The tetrahedron, with a Petrie polygon, and its Petrie dual.
If we regard the cube as a map on the sphere, then its Petrie polygons, such as that indicated with thick red lines in Figure 2, have length 6. The six quadrilateral faces of are replaced in with four hexagonal faces; this map is shown on the right in Figure 2, where opposite sides of the outer hexagon are identified to form a torus, so that there are just two vertices at the corners. Again, the graph ( in this case) and the automorphism group ) are unchanged.
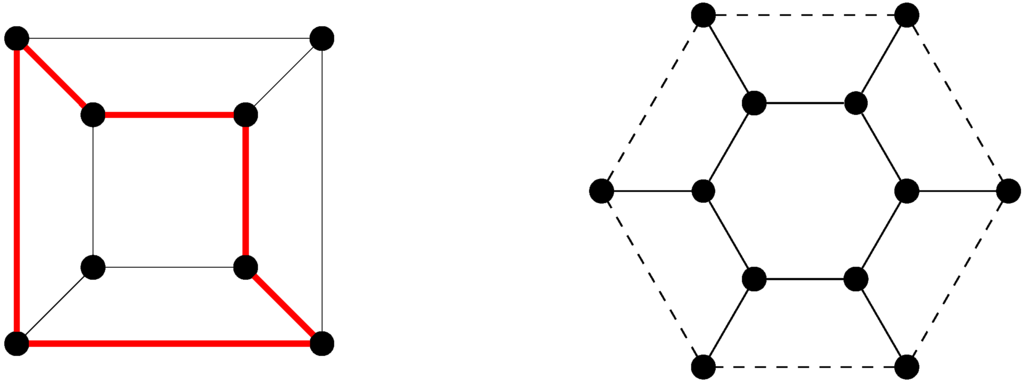
Figure 2.
The cube, with a Petrie polygon, and its Petrie dual.
The difference between the Euler characteristics of a map and its Petrie dual can be arbitrarily large. For example, let be the regular map on the sphere with two vertices joined by n edges, so that there are n digonal faces. If n is odd there is a single Petrie polygon; since has two vertices, n edges and one face, it has characteristic and genus ; in fact, it can be formed by orientably identifying opposite sides of a -gon (see Figure 3 for the case ).
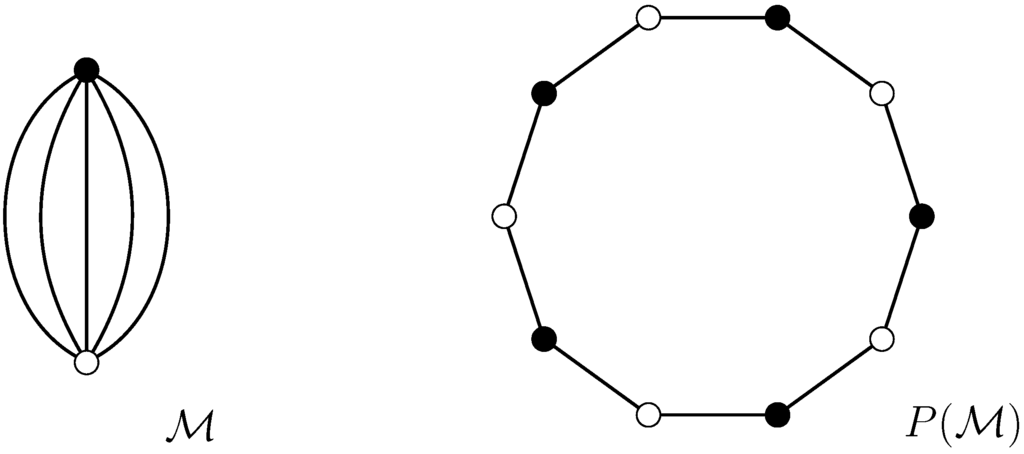
Figure 3.
A planar map and its Petrie dual.
This means that Petrie duality can be very useful in creating maps of large genus from those of smaller genus, while preserving the embedded graph and the symmetry properties of the maps. For example, James [9] showed that the complete graph has a regular embedding in a non-orientable surface if and only if or 6. There are three obvious examples on the real projective plane, namely the antipodal quotients of the spherical embeddings of a circuit of length 6, the cube (see Figure 1), and the icosahedron. There is, however, a fourth example, the self-dual map N5.3 in Conder’s list of regular maps [10], which is much harder to describe or to visualise since it has genus 5. It is perhaps most easily constructed as the Petrie dual of the last of these three maps, or alternatively as the antipodal quotient of the great dodecahedron (R5.6 in [10], see Section 6.2 in [8]), an orientable map of genus 4 with 12 vertices of valency 5 and 12 pentagonal faces.
3. The Group of Map Operations
Clearly the classical vertex-face duality D and the Petrie duality P are operations of order 2, so they satisfy
where I denotes the identity operation on maps. One might hope that the dual of the Petrie dual of a map is the same as the Petrie dual of its dual, but in fact the operations D and P do not commute: Wilson [11], building on earlier work of Coxeter in Section 8.6 of [7] and in [12], showed that they satisfy
so they generate a group Ω of operations isomorphic to the symmetric group . (See the slightly later paper [13] by Lins for a similar idea.) For example, by applying different operations in this group to the cube we obtain six non-isomorphic maps: there are two each on the sphere and the torus (the maps in Figure 2 and their duals), and a dual pair on a non-orientable surface of genus 4, corresponding to entry N4.2 in [10].
In addition to D and P there is a third involution in Ω, the operation , giving another duality for maps. Wilson called this the “opposite” operation, since it acts by cutting the faces of a map apart along the edges, and then rejoining adjacent faces with the opposite identifications of their common edges. This preserves the set of faces of a map, but transposes vertices and Petrie polygons, so it generally changes both the surface and the embedded graph. Similarly, there are two triality operations on maps, namely the elements and of order 3 in Ω.
The group Ω thus acts as the symmetric group , permuting the three sets consisting of the vertices, faces and Petrie polygons of each map. Only the sets of edges and of flags, together with the automorphism group, remain invariant. This suggests a symmetry between these three features of a map, giving them equal status. This is partially recognised in the notation introduced by Coxeter to indicate the extended type of a map: the abbreviated notation indicates that all faces are p-gons and all vertices have valency q, while the subscript r, indicating that the Petrie polygons all have length r, admits them as at least a junior member of the family.
For each subgroup , one can find examples of maps which are invariant only under the operations in , so that they lie in an orbit of length : this is easy when or 2, and not difficult for , as in the recent papers by Cunningham [14] and by Richter, Širáň and Wang [15] (the simplest example in this case is the embedding of a circuit of length 2 in the sphere), but it is quite hard when is the subgroup of order 3 generated by the triality operations, so that . Indeed, Wilson originally thought that no such maps could exist. He eventually produced an example in [11], and this was generalised to three infinite families by Poulton and the first author in [16], but none of the constructions is straightforward. According to Conder [17], Wilson’s example, a non-orientable map N72.9 of type and genus 72, with automorphism group , is the smallest such map, while the smallest orientable example has genus 193 and type , with an automorphism group of order 2048.
In the next section we will introduce a group-theoretic description of maps on surfaces, which we will then use to explain this group of operations, together with its analogues in other geometric and combinatorial categories.
4. Maps and Permutations
Let be any map. For simplicity, let us assume that the underlying surface is without boundary. (Here, this is no great loss of generality, since maps with non-empty boundary are rarely highly symmetric.) Let Φ be the set of flags of , where and f are a mutually incident vertex, edge and face. For each and each , there is one other flag sharing the same j-dimensional components as for each . Let us define to be the permutation of Φ transposing all such pairs . Figure 4 shows how these three permutations and act on a typical flag .
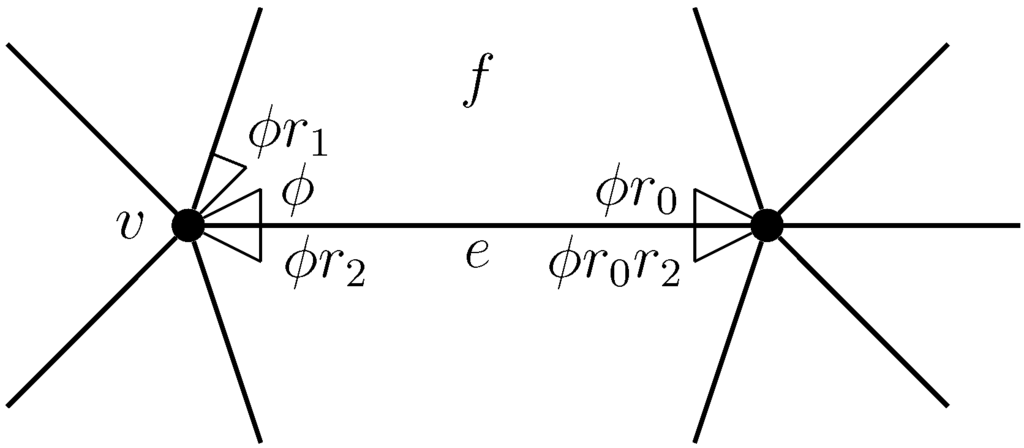
Figure 4.
The permutations acting on a flag .
Let us define the monodromy group of to be the subgroup
of the symmetric group on Φ generated by the permutations and . By their construction, these permutations satisfy
so let us define Γ to be the abstract group with presentation (in terms of generators and relations)
Then there is an epimorphism , that is, a permutation representation of Γ on Φ, given by
Conversely, given any (not necessarily transitive) permutation representation of Γ on a set Φ, one can construct a map by taking the vertices, edges and faces to correspond to the orbits on Φ of the subgroups , and , mutually incident when these orbits have non-empty intersection. More specifically, one can construct the barycentric subdivision of by taking a set of triangles in bijective correspondence with Φ, each with edges labelled and 2, and joining two triangles along their edges labelled i whenever transposes the corresponding elements of Φ; the embedded graph is the union of all the edges labelled 2 in .
The connected components of this map correspond to the orbits of G on Φ, so we will assume that is connected, or equivalently that Γ acts transitively on Φ. In this case the stabilisers of flags form a conjugacy class of subgroups , called the map subgroups corresponding to . These all have index in Γ, so finite maps correspond to subgroups of finite index in Γ. Oriented maps without boundary correspond to map subgroups contained in the even subgroup of index 2 in Γ, consisting of the words of even length in the generators .
The automorphism group of can be regarded as the group of all permutations of the flags commuting with and , or equivalently as the centraliser
of G in . A simple argument then shows that
where N denotes “normaliser”, and is the subgroup of G fixing a flag . We say that the map is regular if A acts transitively on Φ. Since the centraliser of a transitive group must act semi-regularly (that is, fixed-point freely), another simple argument shows that this is equivalent to G being a regular permutation group, in which case M is a normal subgroup of Γ and
This allows us to identify G and A as abstract groups, though as permutation groups on Φ they are distinct, and can be regarded as the right and left regular representations of the same group.
It is clear from its presentation that Γ decomposes as a free product
where and denote a cyclic group of order 2 and a Klein four-group . This decomposition allows various techniques from combinatorial group theory (see [18,19]) to be applied to maps, as in [20] for example.
The elements and of Γ induce rotations of flags around their incident faces and vertices, so if a map has type we have . When studying maps of a given type one can therefore add the relations
to the presentation of Γ, giving the extended triangle group
which plays the role of Γ for this category of maps. Within this category, the oriented maps without boundary are those whose map subgroups M are contained in the ordinary triangle group
the subgroup of index 2 in consisting of the words of even length in the generators .
5. Operations and Automorphisms
The faces of a map correspond to the orbits of the dihedral subgroup of Γ on Φ, with the boundary circuit of each face obtained by starting with an incident flag and alternately applying the permutations and . Similarly, the Petrie polygons of correspond to the orbits of the dihedral subgroup of Γ, now obtained by starting with an incident flag and alternately applying and . To put this another way, if corresponds to a conjugacy class of subgroups M of Γ, then the Petrie dual corresponds to the conjugacy class consisting of their images under the automorphism
of Γ transposing and . In a similar way the duality operation D corresponds to the automorphism
of Γ, transposing and , while the group Ω generated by D and P corresponds to the automorphism group of the Klein four-group , permuting the three involutions and and inducing a group of automorphisms of Γ isomorphic to .
In [20], Thornton and the first author used the free product structure of Γ to show that is the semidirect product of the inner automorphism group , isomorphic to Γ, and this group Σ. Since inner automorphisms leave conjugacy classes of map subgroups, and hence their associated maps, invariant, we have an induced action of the outer automorphism group
This gives a group-theoretic interpretation of the six operations on the category of all maps, and also explains why there are no others.
With this machinery available, it is easy to construct regular maps which are invariant under P: take any normal subgroup N of Γ, corresponding to some regular map , and define to be the map corresponding to the normal subgroup . This is the smallest map covering both and . For example, the icosahedron is a regular map of type , so is a regular map of type with the same automorphism group (it is the dual of the non-orientable map N14.3 of genus 14 in [10]), and a straightforward calculation shows that the resulting self-Petrie-dual map is an orientable regular map of type and genus 961 with automorphism group .
Similarly, by taking M to be intersection of the images of N under all six automorphisms in Σ we obtain an Ω-invariant orientable regular map of type and genus 187201 with automorphism group , the smallest covering of the icosahedron such that . There are six distinct images of N, each of the form for unique normal subgroups A and B of Γ with quotients and ; there are three distinct subgroups A and three distinct subgroups B which arise, each set permuted by Σ as , but the images of N correspond to an orbit of Σ of length 6 on the nine ordered pairs , giving six non-isomorphic images of under Ω. The three subgroups A and the three subgroups B intersect in normal subgroups with quotients and respectively, so this calculation, which has been confirmed with the aid of GAP [21], explains why has automorphism group and not, as one might expect, . See [14] for generalisations to polyhedra.
As shown by the first author in [22], there are many other categories in which geometric or combinatorial objects can be identified with the permutation representations of a particular group Δ, so that acts as a group of operations. For maps of a given valency k, for example, the permutations satisfy , so we can add the relation to the presentation for Γ, giving the extended triangle group . In this case, if then , with the generator of induced by π, corresponding to the Petrie operation on k-valent maps. The case , for cubic maps, is of particular interest, since the corresponding group Δ is the extended modular group , with ; the non-identity outer automorphism was discovered by Dyer [23], correcting an error in [24]. Uludaǧ and Ayral [25] give a wide range of applications and manifestations of this outer automorphism, ranging from number theory to dynamical systems.
In contrast with these finite groups of operations, James [26] has shown that for the categories of hypermaps and of oriented hypermaps, where Δ is a free product or a free group , the groups of operations are infinite, isomorphic to and respectively. Maps can also be generalised to abstract polytopes of higher rank n, with the role of Δ played by the string Coxeter group
of rank n with Schläfli symbol . James [27] has shown that for polytopes of each rank , the group of operations is isomorphic to the dihedral group of order 8, generated by involutions D and P corresponding to automorphisms
and
In the rest of this paper we will focus on the regular maps which embed a particular graph, the Anstee–Robertson graph, together with their regular quotients, showing how Petrie duality can be used to understand them.
6. The Graph and Its Group G
It is easy to see that a graph of valency 6 and girth 5 must have at least 37 vertices. In fact the smallest such graph, the -cage first discovered by Robertson [1], has order 40. There are various constructions of this graph. Here we will use one based on [5] which is particularly useful for studying the automorphism group of the graph.
Let denote the 2-dimensional vector space over the field of order 5, and let T be the set of unordered triples which span and satisfy . These conditions imply that each , so . The natural action of on induces a faithful action of this group on T. This action is transitive, since each triple in T is an image of the standard triple
The stabiliser of ω in is a subgroup , permuting the three vectors .
There is a unique subgroup of index 2 in , consisting of the elements with non-zero square determinant. (Here “H” stands for “half”.) This group K contains the group
of scalar matrices as a cyclic central subgroup of order 4, with quotient group
The six matrices in S have determinant , so , and hence K has two orbits on T, each of size . The orbit containing ω consists of those triples such that is a square for one (equivalently each) pair . (Here denotes the matrix formed by using the coordinates of and with respect to the standard basis as its rows.)
Lemma 1.
The stabiliser of ω in K fixes four elements of V, and has six orbits of length 6 on the remaining elements of V.
Proof.
The orbits of S on V must have lengths dividing . Those of length 1 are the four sets where ; such triples all lie in V since . (This shows that the actions of K on its orbits V and are inequivalent, since they have different conjugacy classes of point-stabilisers; these actions differ by an outer automorphism of K, induced by conjugation in .)
A non-trivial orbit of S has length 2 if and only if it contains a triple fixed by the matrix of order 3, i.e. of the form where (to avoid triples fixed by S); such a triple is in V if and only if is a non-zero square. By inspection of , there are no such orbits.
Similarly, a non-trivial orbit of S has length 3 if and only if it contains a triple fixed by the matrix of order 2, with ; such a triple is in V if and only if is a non-zero square. Again, there are no such orbits.
Any other orbits of S must have length 6, so there are four orbits of length 1, and six of length 6. ☐
The fixed points of S are the triples for , and the orbits of length 6 are represented by the following triples :
These give ten orbitals (K-orbits on ) for K, with . The corresponding orbital graphs , with vertex set V and arc set , have valency 1 or 6 as or . (See [5] for background on orbital graphs.) We will concentrate on the graph ; this graph is undirected, corresponding to a self-paired orbital , since the involution
transposes ω and its neighbour
By listing the neighbours of the vertices ω and τ, one can check that these two adjacent vertices have no common neighbours; since K acts transitively on the edges of it follows that this graph is triangle-free. Similarly, no neighbour of ω has a common neighbour with τ, other than ω, so there are no cycles of length 4 in . However, the matrix
of order 5 sends ω to τ, giving a pentagon, i.e., a cycle of length 5 in . Thus has girth 5, so having 40 vertices it must be the unique cage of girth 5 and valency 6 (see [6]). Following [5] we will call the Anstee–Robertson graph. It is shown in Figure 5 as a Hamiltonian graph, with a pentagon (appearing here as a pentagram) drawn in thick red lines.
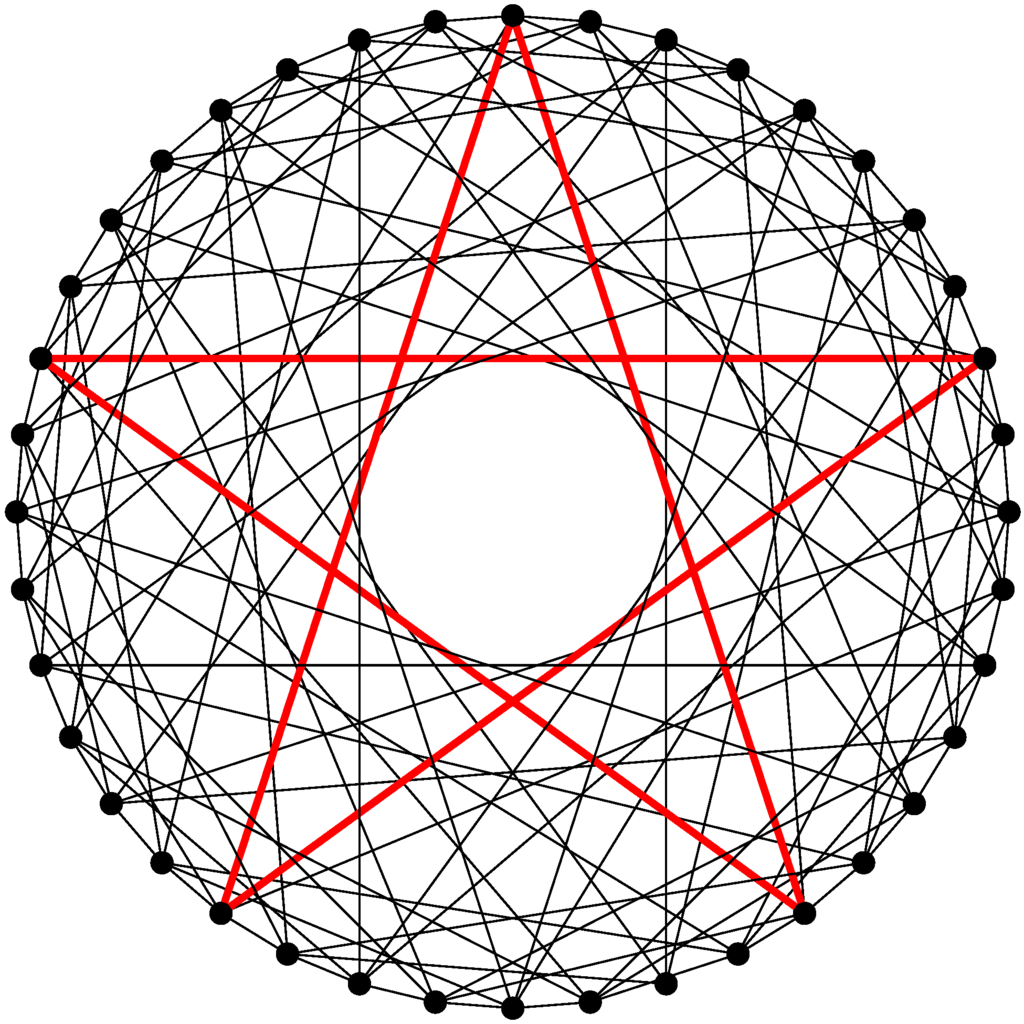
Figure 5.
The Anstee-Robertson graph .
The action of Z partitions the triples in V into ten blocks of size 4, forming a system of imprimitivity for K. Identifying vertices within each block gives a quotient graph of order 10 and valency 6, with acting arc-transitively on it. Now , so the action of on vertices of can be identified with the unique transitive action of of degree 10, namely on unordered pairs from , showing that is isomorphic to the line graph of . The full automorphism group of is isomorphic to , and as shown by Anstee [2] (by treating the adjacency matrix of as a block matrix) the elements of all lift back to automorphisms of . This shows that the automorphism group
of has order , and is an extension of a normal subgroup by , with K, an extension of Z by , as a subgroup of index 2. However, Anstee’s assertion that G is a direct product of Z and is incorrect (see [5]): the extension does not split.
(In a slightly different but related context, K is described in [28] as a central product of Z and , amalgamating central subgroups Y of order 2. It arises as the automorphism group of a locally icosahedral graph on V formed by merging the orbitals and of K in Section 9.5 of [5].)
As a permutation group on V, G has rank 7, with suborbits of lengths and 12; in particular, the orbitals and are merged in G, as are and , whereas and are unmerged.
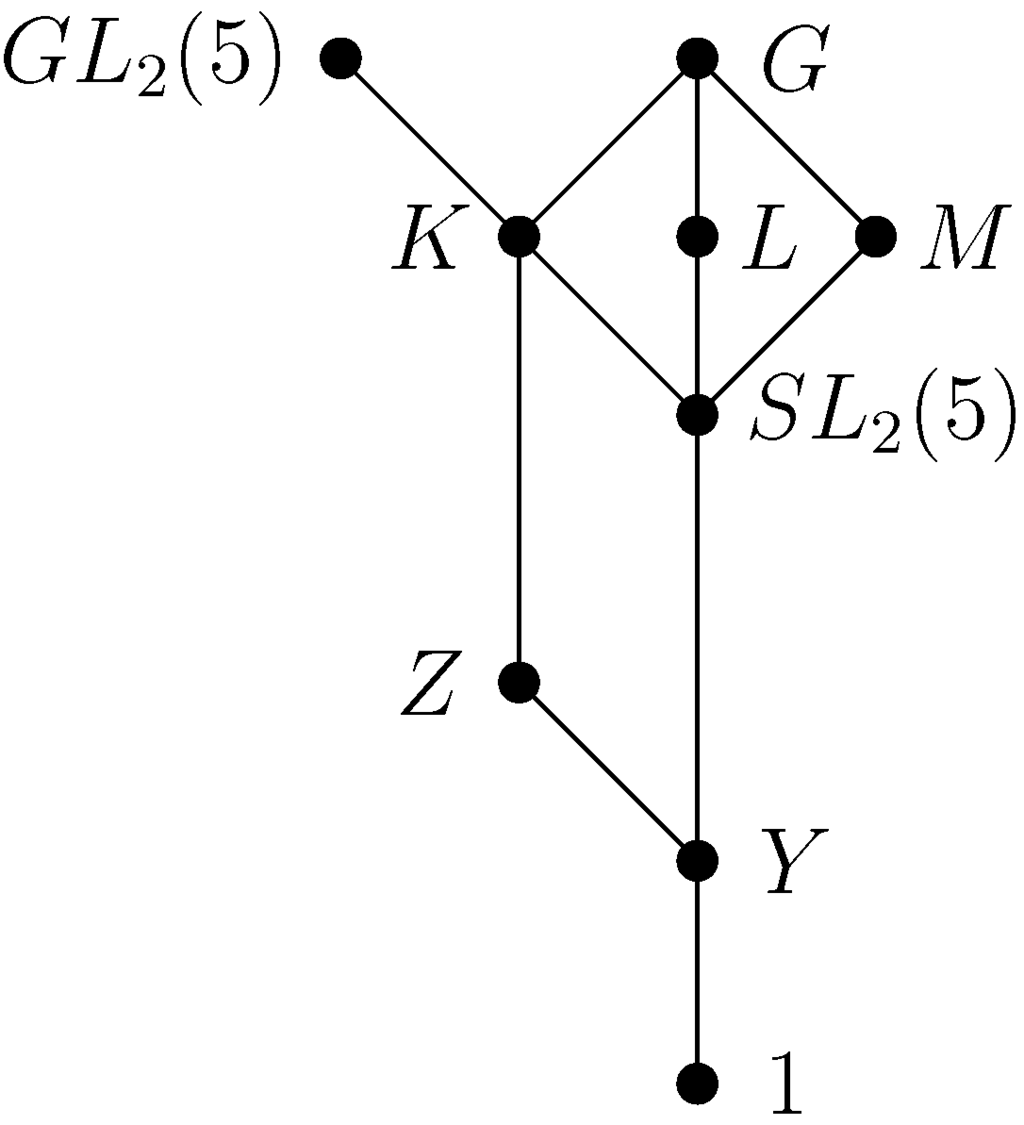
Figure 6.
The lattice of normal subgroups of G and .
Since , there are three subgroups and M of index 2 in G containing . The lattice of normal subgroups of G and of is shown in Figure 6, with : short edges denote index 2 inclusions, long edges denote index 60 inclusions, with quotient group .
In order to understand the structure of G, it is important to note that although this group is closely related to , they are not isomorphic. For instance, has centre , but this group is inverted in G, so that the centre of G is the subgroup Y of order 2 in Z. Similarly, both and G are extensions of K by , but G is a split extension whereas is not, since there are no involutions in . (There are more details of the structure of G, based on the construction of the regular maps, at the end of the next section.)
The graph is a Cayley graph, as shown in Propositions 9.2 and 9.11 of [5], although its quotient is well known not to have this property: the six subgroups of isomorphic to lift back to subgroups of order 80 in G, the normalisers of its six Sylow 5-subgroups; their intersections with L and with M form two conjugacy classes of six subgroups
acting regularly on the vertices of . These are non-split double covers of with common intersection .
7. Construction of the Maps
There is a single conjugacy class of elements of order 5 in G, consisting of the 24 non-identity matrices in with trace 2. A simple matrix argument shows that there are two such matrices sending ω to its neighbour τ: the matrix B given earlier, together with
This means that the edge of is contained in two pentagons, and . By the transitivity of G on arcs, the same applies to each ordered pair of neighbours in . There are 240 such pairs, so each of the 24 elements of order 5 acts in this way on such pairs of neighbours; these lie in pentagons, forming an orbit under Z. Each of the twelve mutually inverse pairs of elements of order 5 in G thus yields 4 pentagons, so we obtain pentagons in , each invariant under a Sylow 5-subgroup of G. We call these the useful pentagons: one of them is shown using thick red lines in Figure 5. Any other pentagon in must have a stabiliser in G of order dividing 2, and hence must lie in an orbit of G of length 240 or 480. (In fact, GAP shows there are 528 pentagons in , the rest of them forming two G-orbits of length 240.)
The neighbours of ω in the pentagon are the vertices
These are transposed by the involution
so this pentagon is invariant under a dihedral subgroup of K of order 10, and by the arc-transitivity of K the same applies to every useful pentagon (such a subgroup is clearly visible for the red pentagon in Figure 5). The useful pentagons therefore form two orbits of size under K. The dihedral subgroup must also be the stabiliser in G of the pentagon , for if this stabiliser were larger then a non-identity element of G would fix this pentagon, whereas the stabiliser in G of ω fixes only one other vertex. It follows that this pentagon lies in an orbit of G of size , so G acts transitively on the useful pentagons.
Following Evans [3] we now embed in a 2-dimensional complex by attaching a pentagonal face to each useful pentagon. We need to show that is a surface. Since each edge of is contained in two useful pentagons, and is therefore incident with two faces, it is sufficient to check that a neighbourhood of each vertex is a disc. By listing the useful pentagons containing a particular vertex v (either by hand as in [3] or by using GAP) one can verify that the faces incident with v form a cycle of length 6 around v, so that a small open neighbourhood of v in is homeomorphic to a disc. The transitivity of G on vertices implies that the same is true for every vertex, so is a surface (rather than a pseudo-surface, as would be the case if the faces around v formed more than one cycle). This embedding of in is a map , which we will call the Evans map. It is a uniform map of type , meaning that the faces are all pentagons and the vertices all have valency 6. This map is illustrated by Evans in Figure 10 of [3].
Any automorphism of is also an automorphism of the embedded graph , so we have . On the other hand, since the faces of are bounded by the useful pentagons, which form a set invariant under automorphisms of , we have . Thus
Since has 120 edges, it has flags , where and f denote an incident vertex, edge and face. In any map, these are permuted semi-regularly by the automorphism group; in this case, since , this action is transitive, so is a regular map (reflexible in the terminology of [7]).
This implies that G is isomorphic to the monodromy group of , so it is generated by automorphisms of , each changing the i-dimensional component of a particular flag while preserving the others. These correspond to the monodromy generators introduced in Section 4 (but now acting as automorphisms by left rather than right multiplication on G), so they satisfy
where
and
(In fact, one can take , and here, so that , with .) The Euler characteristic of is
so is either orientable of genus 17 or non-orientable of genus 34. As shown by Evans [3] one can assign consistent orientations to the useful pentagons, so that is orientable. (Alternatively, one can use GAP to show that G has a subgroup of index 2, the image of , with each , or equivalently that the Cayley graph for G with respect to these generators is bipartite; then is the group of orientation-preserving automorphisms of . In fact, Conder’s list of regular maps [10] shows that there is no non-orientable regular map of genus 34 and type , giving a third proof.)
Inspection of Conder’s list [10] shows that must be the map R17.16, the only orientable regular map of genus 17 and type . This map has Petrie length 8, so the Petrie dual is a map of type . As explained earlier, this is another regular map, also embedding the Anstee-Robertson graph , with . It has Euler characteristic
so inspection of [10] shows that it must be the vertex-face dual of one of the two non-orientable regular maps N52.3 and N52.4 of genus 52 and type . These have Petrie lengths 10 and 5 respectively, and since the Petrie polygons of correspond to the faces of , it follows that is the dual of N52.4 (we will return to N52.3 and its dual later). The entry for N52.4 in [10] includes the comment “mV = 2”, meaning that each pair of adjacent vertices have two edges in common; equivalently, each pair of adjacent faces of , or of adjacent Petrie polygons of , also share two common edges.
In addition to K, there are two other subgroups of index 2 in G, denoted by L and M in [5], of ranks 9 and 11 on V; any two of these intersect in . The stabiliser of ω, a cyclic group of order 6, has the following orbits on V: , an orbit of length 6 consisting of the neighbours of ω, five orbits of length 6 consisting of the vertices at distance 2 from ω, and orbits of length 1 and 2 on the three vertices at distance 3 from ω. Thus has rank 9 on Ω, so one can identify this subgroup with L, rather than M.
If H denotes either L or M then and , the unique subgroup of order 2 in Z, so . Thus H is a double cover of . This cannot be a direct product, for if it were then would have a subgroup of index 2, whereas it is perfect. Thus H must be isomorphic to one of the two nontrivial double covers of . Now has a unique involution (generating the centre), whereas has non-central involutions. The half-turn lies in L and the reflection lies in M: neither can be in K since and . It follows that each . Thus G is a product of and amalgamating a common subgroup of index 2 in each.
Our investigations lead to the following uniqueness theorem:
Theorem 2.
The only regular maps embedding the Anstee-Robertson graph are the orientable Evans map of type and its Petrie dual, the non-orientable map of type . In Conder’s lists these are the maps R17.16 and the dual of N52.4.
Proof.
Since has automorphism group G of order twice the number of arcs, any regular map which embeds must also have automorphism group G. Now the 6-valent regular maps with automorphism group G correspond to the orbits of on generating triples of G satisfying
A search with GAP shows that there are four such orbits: for one pair of orbits the elements and have orders 5 and 8 or vice versa, so these orbits correspond to the maps and of types and . For the other two orbits these elements have orders 10 and 8 or vice versa, giving a Petrie dual pair of maps and of types and . However, the graph embedded by and is not isomorphic to , since reconstructing it from the corresponding generators shows that has girth 3 rather than 5. □
This graph is, in fact, the graph corresponding to the orbital for G defined earlier. (The notation commemorates a splendid performance of Verdi’s Macbeth, seen by one of the authors while writing this paper.) By inspection of [10], the maps and are the duals of the orientable map R29.12 and the non-orientable map N52.3. As an immediate corollary to the above proof, we have the following:
Corollary 3.
The only regular maps embedding the graph are the dual of the orientable map R29.12, of type , and its Petrie dual of type , the dual of the non-orientable map N52.3.
Remark
The four orbits on generating triples discussed above all have length : the inner automorphism group has order 240, and the outer automorphism group is a Klein four-group.
8. Quotient Maps
In this section we will describe the quotient maps of and by the groups Y and Z. Since these are normal subgroups of G, the corresponding quotient maps are all regular.
Let Y denote the unique subgroup of order 2 in Z. Then Y is a characteristic subgroup of Z, and Z is normal in G, so Y is a normal (in fact central) subgroup of G. The central involution generating Y is a half-turn around the centres of the Petrie polygons of , or equivalently around the face-centres of , transposing pairs of edges separating common pairs of Petrie polygons or faces. In fact Y is the kernel of the action of G on the Petrie polygons of , or equivalently the faces of . The quotient maps and are regular maps with automorphism groups of order 240 isomorphic to
while and are regular maps with automorphism groups of order 120 isomorphic to
We will now describe these maps, showing that some of them are well-known objects.
Since Y has trivial intersections with the stabilisers in G of the vertices, edges and faces of , the covering is unbranched, so has the same type as and has Euler characteristic . Since Y is contained in the commutator subgroup of G it preserves the orientation of , so is orientable, of genus 9. Inspection of [10] shows that it is R9.16, with Petrie length 4 (the map R9.15, with the same genus and type, is excluded since its Petrie length 10 does not divide that of ). In Table 8 of [7] it is shown that the regular map , the largest map of type with Petrie length 4, has an automorphism group of order 240; all other regular maps with this type and Petrie length are quotients of it, so comparing orders gives . (One can construct by applying Wilson’s “opposite” operation (see Section 3) to the median map of the great dodecahedron, a map of type and genus 4.)
Now must be the Petrie dual of , that is, the largest regular map of type with Petrie length 5. This is non-orientable, of genus 12, isomorphic to N12.1 in [10]. The covering is branched at the face-centres because for each face f of .
Since Z contains Y the maps and are quotients of and , obtained by factoring out the central subgroups in their automorphism groups . The coverings and are both unbranched, so and have Euler characteristic and . Inspection of [10] shows that is the non-orientable map N10.6 of genus 10 and type (one of the dodecahedra considered by Brahana and Coble in [29], see Section 8.6 of [7]), while is its Petrie dual, the non-orientable map N7.1 of genus 7 and type . These are the two regular embeddings of the line graph of , see Theorem 10 (c) of [30]. In fact, by Corollary 11 of [30], the only regular embeddings of line graphs of complete graphs are these, together with the dihedron and its Petrie dual (the antipodal quotient of the dihedron ) for , and the octahedron and its Petrie dual (a non-orientable map of type and genus 4, the dual of N4.2 in [10]) for .
9. Maps and Triangle Groups
As explained in Section 4, maps on surfaces can be interpreted in terms of subgroups of triangle groups, so here we will briefly outline how this applies to the maps constructed earlier. As a regular map of type , corresponds to a normal subgroup of the extended triangle group , with
Since is orientable, M is contained in the even subgroup of Δ, the ordinary triangle group . Now the abelianisations and of Δ and G are isomorphic (both are Klein four-groups), so M is contained in the commutator subgroup of Δ. This is the ordinary triangle group , and the normal inclusion of M in (a subgroup of index 2 in Δ) corresponds to a regular hypermap of type and genus 17 on (a dual of RPH17.7 in [10]). The Walsh bipartite map [31] of , a map of type with a 2-colouring of its vertices, is just the dual map of . This shows that is 2-face colourable, giving a partition of the 48 useful pentagons into two sets of 24. The quotient maps and correspond to normal subgroups of Δ containing M with index 2 and 4 respectively, with quotient groups isomorphic to and . Since Y and Z have trivial intersections with the stabilisers of vertices, edges and faces in G, these coverings are unbranched, and the quotient maps have the same type as . However, the element of order 8 has order 4 modulo Y and Z, so the Petrie length 8 of is reduced to 4 for and .
There is a parallel description of the sequence of maps and coverings in terms of normal subgroups of the extended triangle group , with the same quotient groups as above. The only significant differences are that these three maps are non-orientable, so that the corresponding normal subgroups are not contained in , and that the first covering is branched over the faces, so that the type of the maps changes from to .
Acknowledgments
We are very grateful to Misha Klin for suggesting the study of the maps associated with the Anstee–Robertson graph, and for his characteristic generosity with advice and encouragement. We also thank Marston Conder and Jozef Širáň for very useful advice about maps and cages, and the referees for their very helpful comments. We are grateful for support from the project Mobility-enhancing research, science and education at the Matej Bel University, ITMS code: 26110230082, under the Operational Program Education cofinanced by the European Social Fund.
Author Contributions
The text was written by both authors. Gareth Jones drew the diagrams, and Matan Ziv-Av carried out the GAP computations.
Conflicts of Interest
The authors declare no conflict of interest.
References and Notes
- Robertson, N. Graphs Minimal under Girth, Valency and Connectivity Constraints. Ph.D. Thesis, University of Waterloo, Ontario, Canada, 1969. [Google Scholar]
- Anstee, R.P. An analogue of group divisible designs for Moore graphs. J. Combin. Theory Ser. B 1981, 30, 11–20. [Google Scholar] [CrossRef]
- Evans, C.W. Net structure and cages. Discret. Math. 1979, 27, 193–204. [Google Scholar] [CrossRef]
- O’Keefe, M.; Wong, P.K. A smallest graph of girth 5 and valency 6. J. Combin. Theory Ser. B 1979, 26, 145–149. [Google Scholar] [CrossRef]
- Klin, M.; Muzychuk, M.; Ziv-Av, M. Higmanian rank-5 association schemes on 40 points. Mich. Math. J. 2009, 58, 255–284. [Google Scholar]
- Wong, P.K. On the uniqueness of the smallest graph of girth 5 and valency 6. J. Graph Theory 1979, 3, 407–409. [Google Scholar] [CrossRef]
- Coxeter, H.S.M.; Moser, W.O.J. Generators and Relations for Discrete Groups, 4th ed.; Springer-Verlag: Berlin, Germany, 1980. [Google Scholar]
- Coxeter, H.S.M. Regular Polytopes, 3rd ed.; Dover Publications: New York, NY, USA, 1973. [Google Scholar]
- James, L.D. Imbeddings of the complete graph. Ars Combin. 1983, 16, 57–72. [Google Scholar]
- Conder, M.D.E. Regular maps and hypermaps of Euler characteristic −1 to −200. J. Combin. Theory Ser. B 2009, 99, 455–459. [Google Scholar] Associated lists of computational data available at http:// www.math.auckland.ac.nz/conder/hypermaps.html.
- Wilson, S.E. Operators over regular maps. Pac. J. Math. 1979, 81, 559–568. [Google Scholar] [CrossRef]
- Coxeter, H.S.M. The abstract groups Gm,n,p. Trans. Amer. Math. Soc. 1939, 45, 73–150. [Google Scholar]
- Lins, S. Graph-encoded maps. J. Combin. Theory Ser. B 1982, 32, 171–181. [Google Scholar] [CrossRef]
- Cunningham, G. Self-dual, self-Petrie covers of regular polyhedra. Symmetry 2012, 4, 208–218. [Google Scholar] [CrossRef]
- Richter, R.B.; Širáň, J.; Wang, Y. Self-dual and self-Petrie-dual regular maps. J. Graph Theory 2012, 69, 152–159. [Google Scholar] [CrossRef]
- Jones, G.A.; Poulton, A. Maps admitting trialities but not dualities. Eur. J. Combin. 2010, 31, 1805–1818. [Google Scholar] [CrossRef]
- Conder, M.D.E.; The University of Auckland, Auckland, NZ. Private communication by email, 9 September 2009.
- Lyndon, R.C.; Schupp, P.E. Combinatorial Group Theory; Springer-Verlag: Berlin, Germany, 1977. [Google Scholar]
- Magnus, W.; Karrass, A.; Solitar, D. Combinatorial Group Theory; Dover Publications: New York, NY, USA, 1976. [Google Scholar]
- Jones, G.A.; Thornton, J.S. Operations on maps, and outer automorphisms. J. Combin. Theory Ser. B 1983, 35, 93–103. [Google Scholar] [CrossRef]
- Metadata: GAP—Groups, Algorithms and Programming, version 4.7.8; The GAP Group— Mathematical Institute: St. Andrews, UK, 2015.
- Jones, G.A. Combinatorial categories and permutation groups. 2013. arXiv:1309.6119. arXiv.org e-Print archive. Available online: http://arxiv.org/abs/1309.6119 (accessed on 16 December 2015).
- Dyer, J.L. Automorphism sequences of integer unimodular groups. Ill. J. Math. 1978, 22, 1–30. [Google Scholar]
- Hua, L.K.; Reiner, I. Automorphisms of the projective unimodular group. Trans. Amer. Math. Soc. 1952, 72, 467–473. [Google Scholar] [CrossRef]
- Uludaǧ, A.M.; Ayral, H. Jimm, a fundamental involution. 2015. arXiv:1501.03787. arXiv.org e-Print archive. Available online: http://arxiv.org/abs/1501.03787 (accessed on 16 December 2015).
- James, L.D. Operations on hypermaps, and outer automorphisms. Eur. J. Combin. 1988, 9, 551–560. [Google Scholar] [CrossRef]
- James, L.D. Complexes and Coxeter groups—Operations and outer automorphisms. J. Algebra 1988, 113, 339–345. [Google Scholar] [CrossRef]
- Blokhuis, A.; Brouwer, A.E.; Buset, D.; Cohen, A.M. The locally icosahedral graphs. In Finite Geometries (Winnipeg, Man., 1984); Dekker: New York, NY, USA, 1985; pp. 19–22. [Google Scholar]
- Brahana, H.R.; Coble, A.P. Maps on the twelve countries with five sides with a group of order 120 containing an icosahedral subgroup. Amer. J. Math. 1926, 48, 1–20. [Google Scholar] [CrossRef]
- Jones, G.A. Automorphisms and regular embeddings of merged Johnson graphs. Eur. J. Combin. 2005, 26, 417–435. [Google Scholar] [CrossRef]
- Walsh, T.R.S. Hypermaps versus bipartite maps. J. Combin. Theory Ser. B 1975, 18, 155–163. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).