

Algorithm to Find and Analyze All Configurations of Four-Bar Linkages with Different Geometric Loci Degenerate Forms

Abstract
1. Introduction
2. Kinematic Analysis: Velocity and Acceleration Poles
3. Collineation Axis
4. Kinematic Analysis: Geometric Loci
5. Numerical Examples
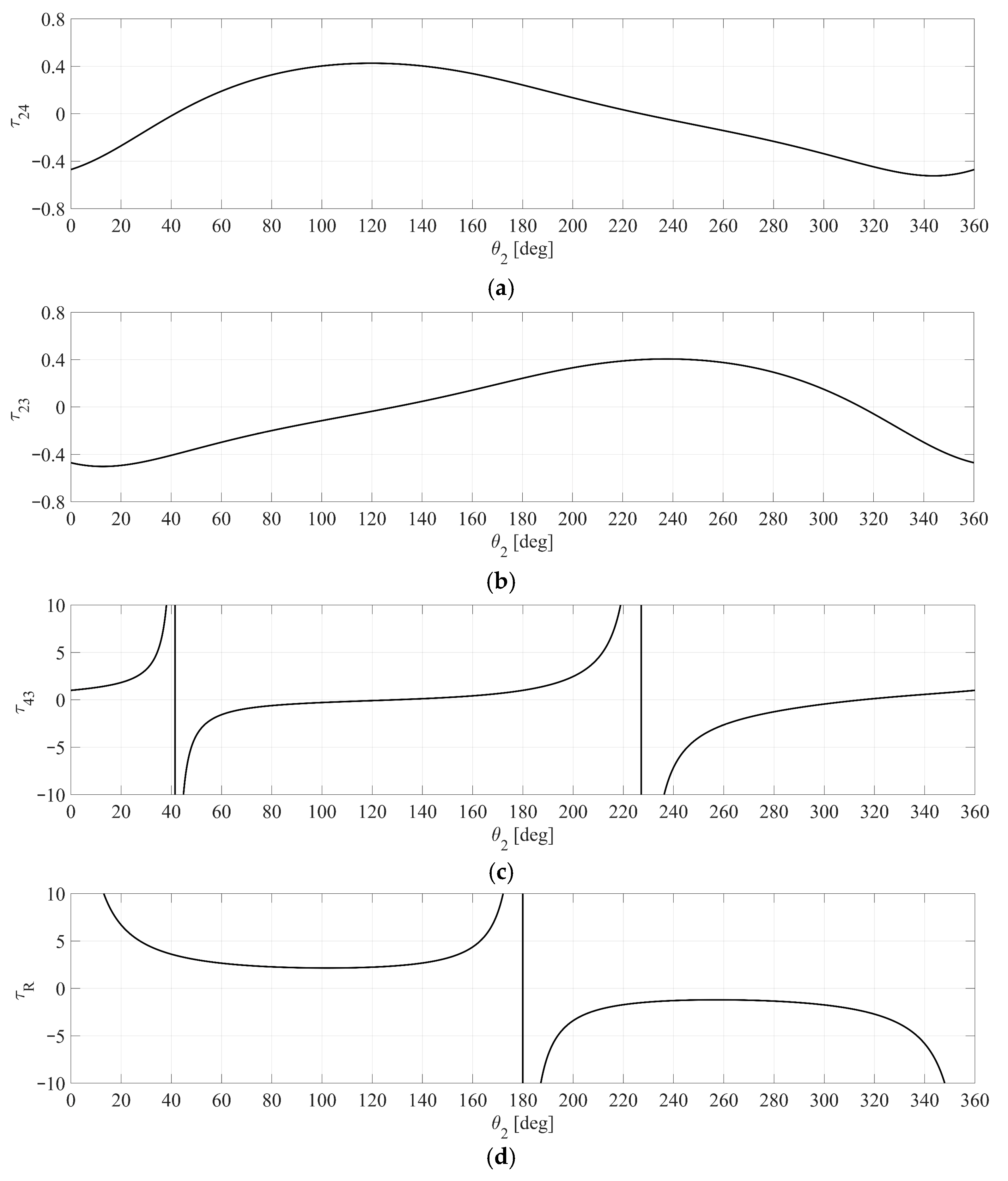
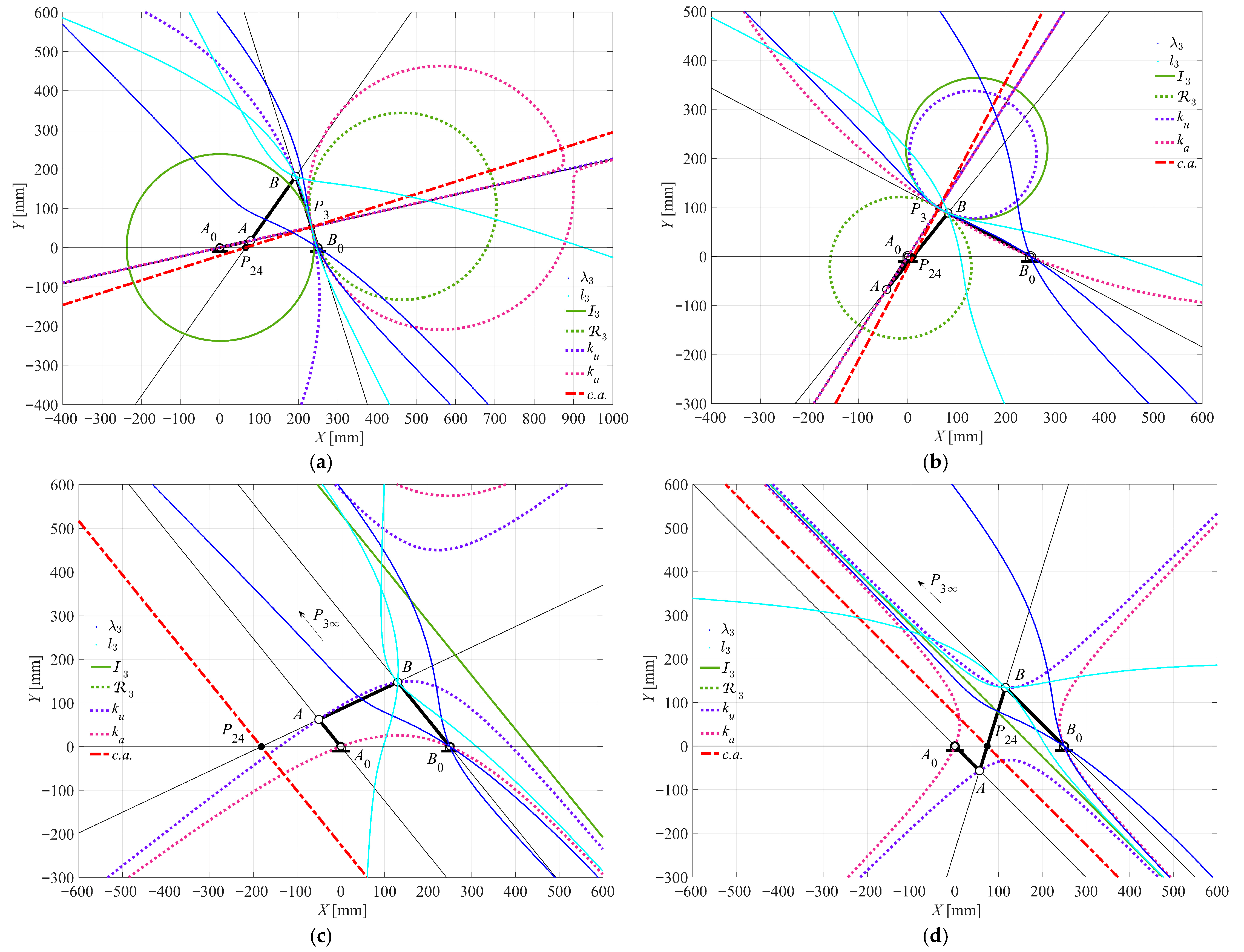
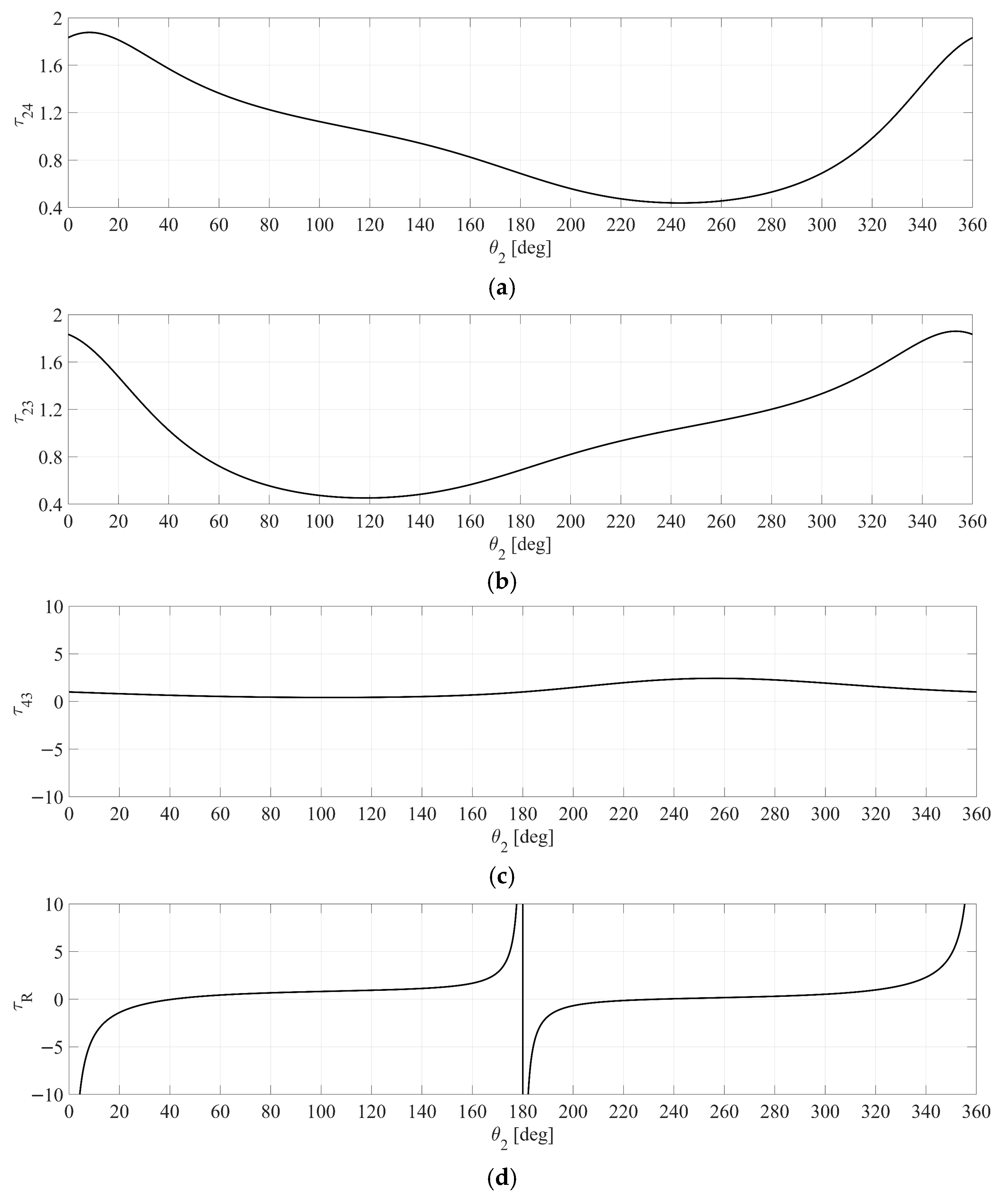
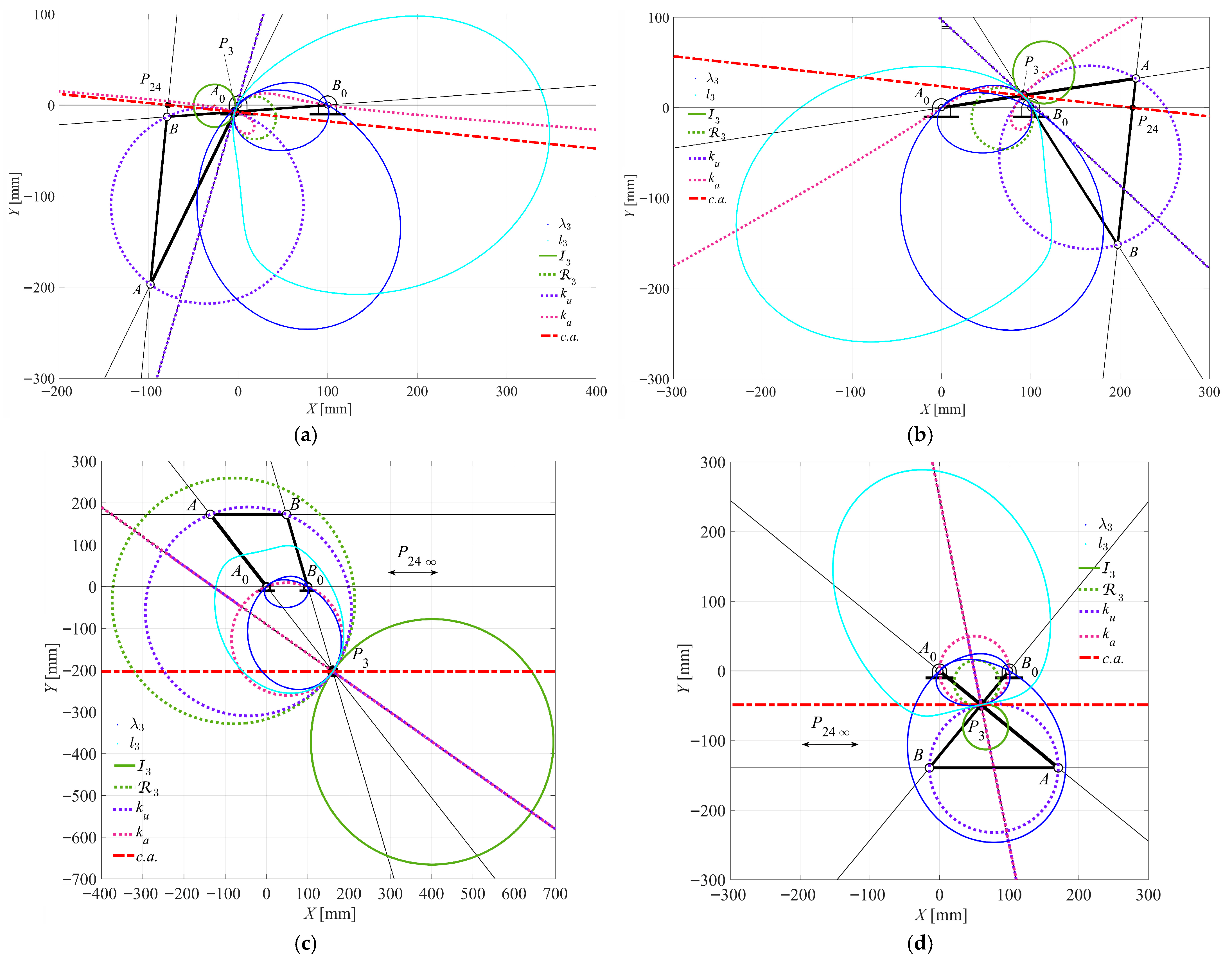
- The minimum τ24MIN = −0.5236 occurs at θ2 = 343.7667°. At this point, the c.a. is orthogonal to the coupler link AB. The ku curve degenerates into a ϕ-curve: a circle through points A, B, and P3, and a line coinciding with the tangent t3 to the I3 at P3, as seen in Figure 9a.
- The maximum τ24MAX = 0.4258 occurs at θ2 = 119.8000°. Similarly to the minimum, the c.a. is orthogonal to the coupler link AB, and the ku curve degenerates into a ϕ-curve, as reported in Figure 9b.
- The τ24 becomes zero at input angles θ2 = 41.5333° and θ2 = 227.1667°. In these cases, where the mechanism is in a dead-point configuration, the c.a. is aligned with the coupler link AB. The ka curve degenerates into a ϕ-curve: a circle passing through P3 (coinciding with B) and A0 (coinciding with P24), along with a straight line coincident with the tangent t3 to the I3 at P3, as shown in Figure 9c,d.
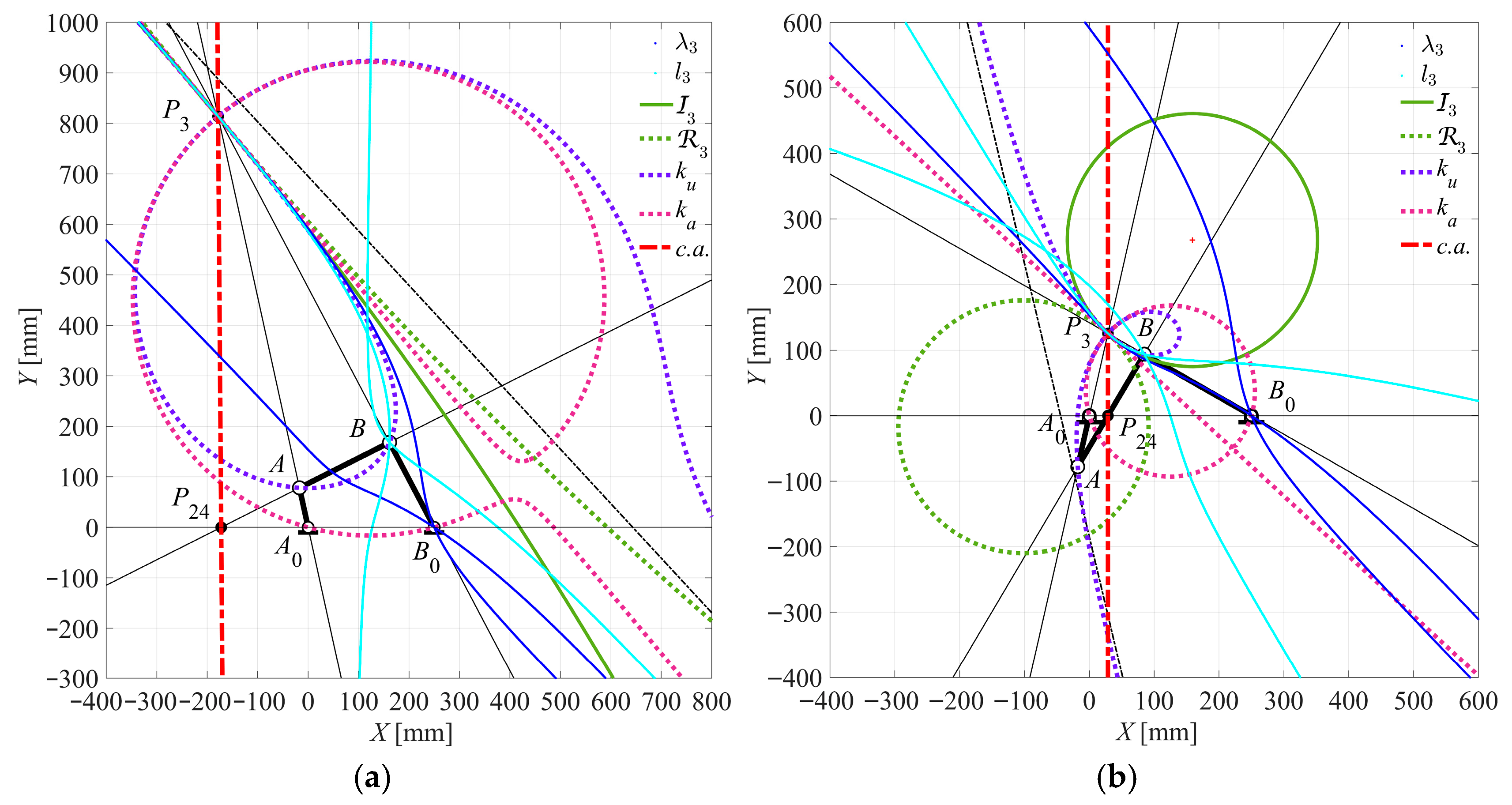
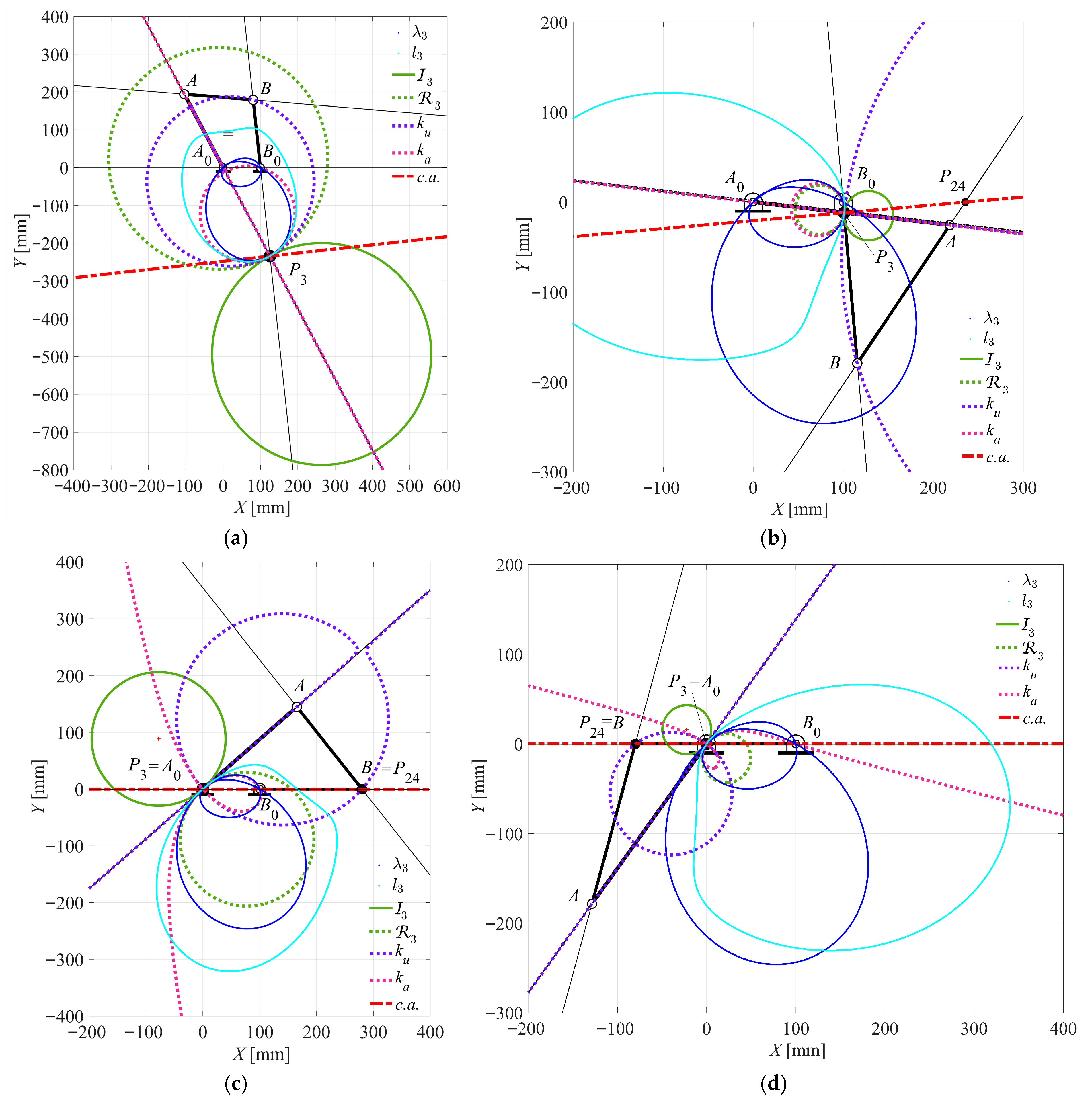
- The minimum τ23MIN = −0.5022 and the maximum τ23MAX = 0.4059 occur at θ2 = 12.7333° and θ2 = 237.4333°, respectively. The c.a. becomes orthogonal to the coupler link B0B. Specifically, these ϕ-curves are composed of the following: a circle passing through points P3 and B0; another circle passing through points B and P3; a straight line, which is orthogonal to the tangent t3 to the I3 at P3, passing through points A0 and A, respectively, as shown in Figure 10a,b.
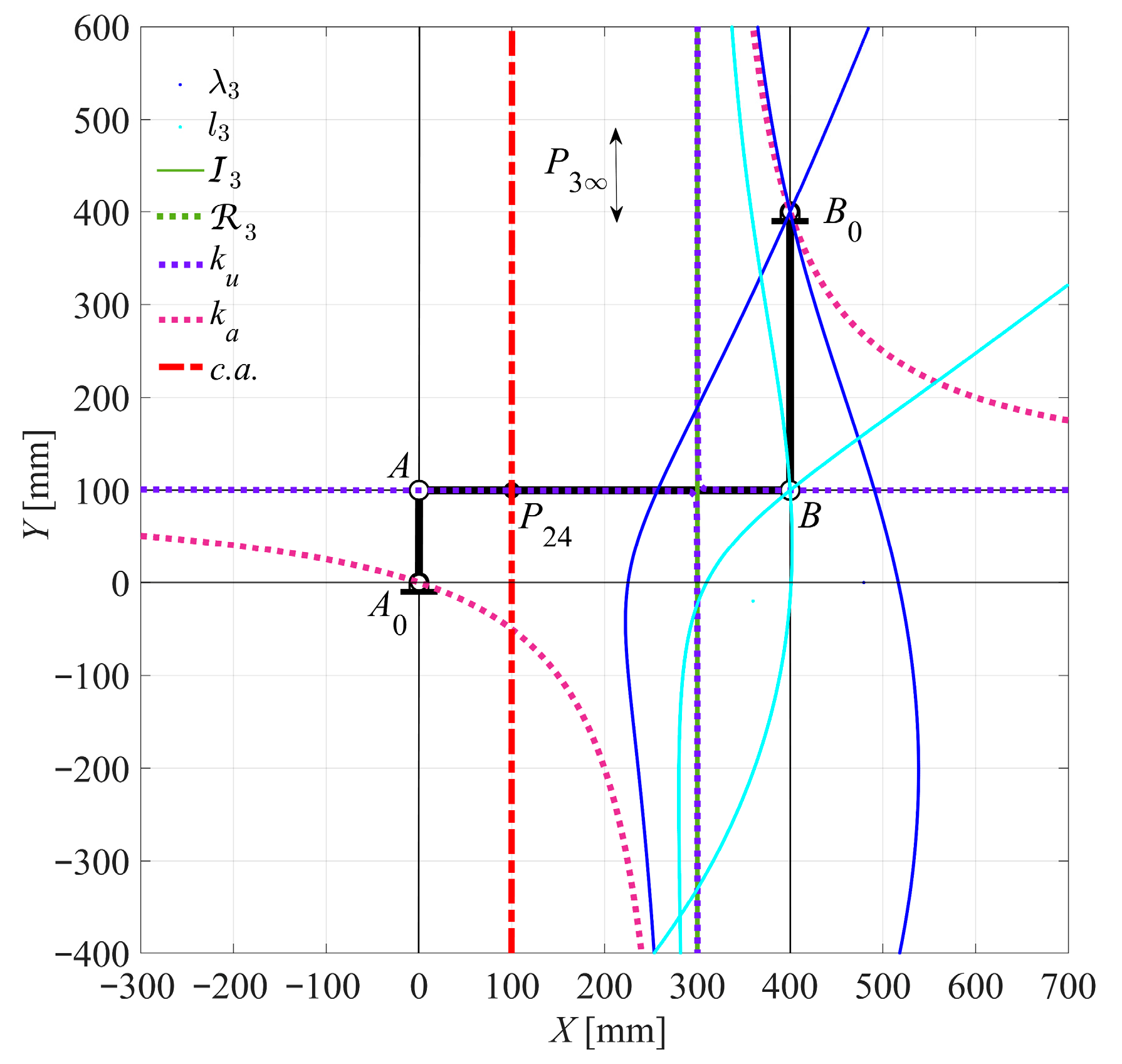
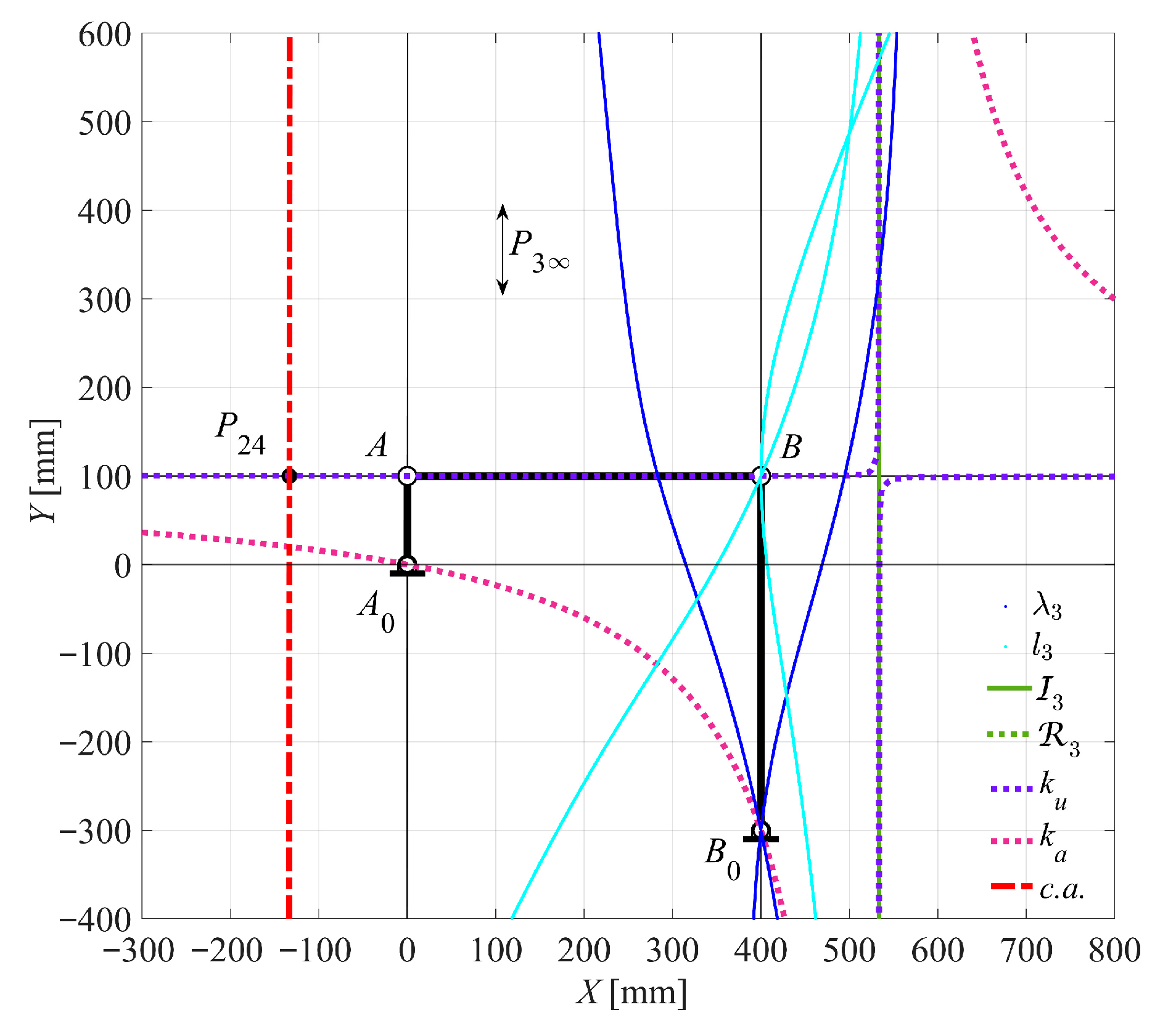
- The τ23 equals 0 occurs at θ2 = 128.9667° and θ2 = 314.9667°. The c.a. becomes parallel to both the input link A0A and the output link B0B, with P3 tending to infinity. Under this condition, both the ka and ku curves degenerate into equilateral hyperbola (or ) ( - curves). In particular, the ka curve passes through points A0, B0, and P3 (at infinity), while the ku curve passes through points A, B, and P3. Additionally, each branch of these curves is tangent to the I3, as shown in Figure 10c,d.
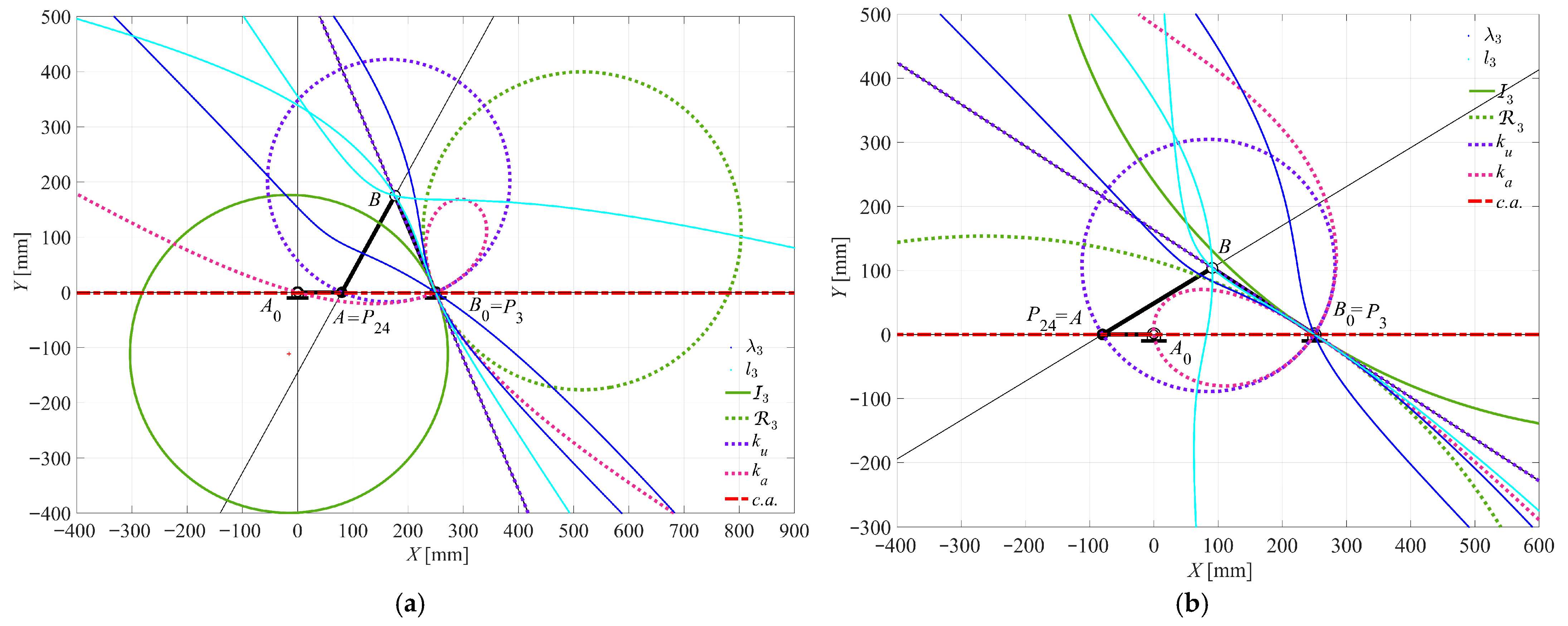
- The τ43 equals 1 at θ2 = 0° and θ2 = 180°. The c.a. aligns with the fixed link A0B0. P24 coincides with point A, and P3 coincides with point B0. The ku curve degenerates into a ϕ-curve (a circle through P3 and A0, and a line coincident to t3 to the I3 at point P3, while also passing through A), as shown in Figure 11a,b.
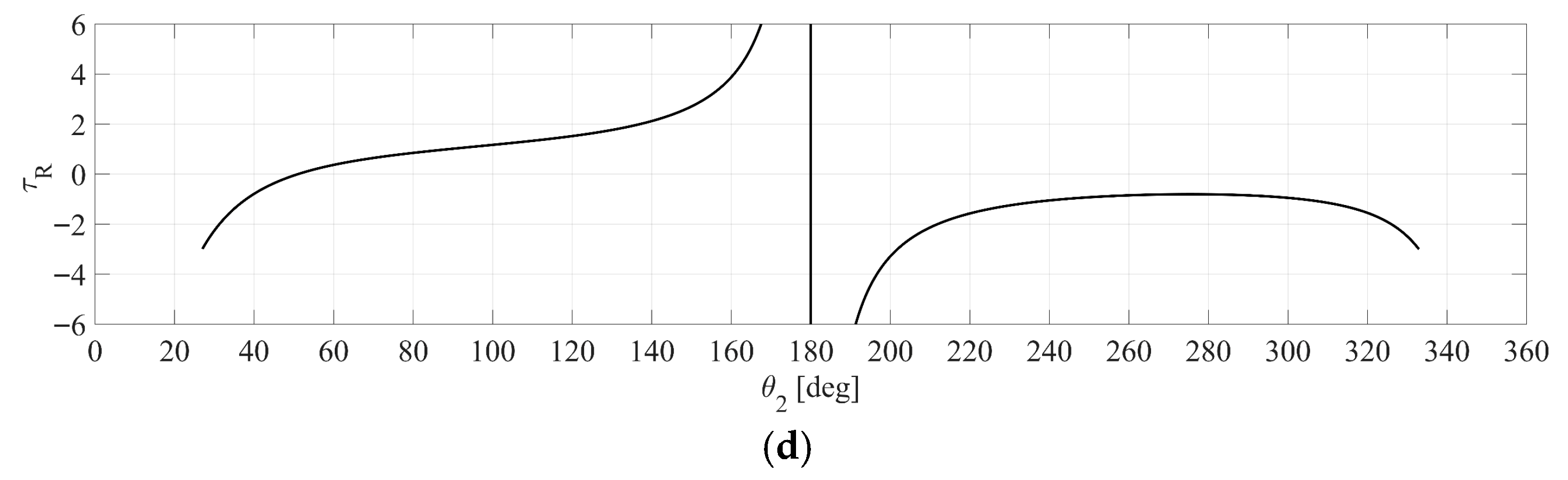
- The minimum τRMINREL = 2.5150 and maximum τRMAXREL = −1.2017 relative values occur at θ2 = 102.3667° and θ2 = 257.1000°, respectively. The c.a. becomes orthogonal to the fixed link A0B0. The ka curve degenerates into a ϕ-curve (a circle passing through points P3, A0, and B0, as well as a straight line (coincident to the tangent t3 to I3 at point P3), as shown in Figure 12a,b.
- The τ24 becomes 1 at input angles θ2 = 128.3667° and θ2 = 320.8333°. The c.a. becomes parallel to both the coupler link AB and fixed link A0B0. Under this condition, both the ka and ku curves degenerate into ϕ-curves, which are composed of the following: a circle passing through points P3, A0, and B0; another circle passing through points A, B, and P3; a straight line that is orthogonal to the tangent t3 to the I3 at point P3, as illustrated in Figure 16c,d.
- The τ23 equals 1 occurs at θ2 = 41.2667° and θ2 = 234.2333°. In these cases, where the mechanism is in a dead-point configuration, the c.a. is in-line with the coupler link AB. The ku curve degenerates into a ϕ-curve, which is a circle passing through points P3 (coinciding with A0) and B (coinciding with P24). Additionally, there is a straight line that is coincident to the tangent t3 to the I3 at point P3, as shown in Figure 17c,d.
- The minimum τ43MIN = 0.4207 and the maximum τ43MAX = 2.4292 at θ2 = 104.1000° and θ2 = 256.7333°, respectively. At these points, where the mechanism is in a dead-point configuration, the c.a. becomes orthogonal to the fixed link A0A. Both the ka and ku curves degenerates into a ϕ-curve, which is specifically defined by the following: a circle that passes through points P3 and A0; another circle that passes through points P3 and A; a straight line that passes through points P3 and B; a straight line that passes through points and P3 and B0. The latter two lines are also coincident to the tangent t3 to the circle I3 at point P3, as shown in Figure 18a,b.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| c.a. | collineation axis |
| h | the distance of a generic point P that has a stationary curvature from P3 |
| hA | the distance of a point A that has a stationary curvature from P3 |
| hB | the distance of a point B that has a stationary curvature from P3 |
| I3 | inflection circle of coupler link 3 |
| ka | centering-point curve or centers of cubic of stationary curvature |
| ku | circling-point curve or cubic of stationary curvature |
| l3 | moving centrode of coupler link 3 |
| M | the motion invariant |
| N | the motion invariant |
| N3 | the y-axis of the canonical reference frame |
| OXY | the fixed frame |
| O3x3y3 | the moving frame |
| P3T3N3 | canonical reference frame |
| P3 | instant center of rotation (ICR) of the coupler link 3 |
| P24 | relative ICR of the output link 4 with respect to the input link 2 |
| 3 | return circle of coupler link 3 |
| r1 | the length of the fixed link A0B0, expressed in [mm] |
| r2 | the length of the input link A0A, expressed in [mm] |
| r3 | the length of the coupler link AB, expressed in [mm] |
| r4 | the length of the output link B0B, expressed in [mm] |
| ri (for i = 1, …, 4) | position vector for link i |
| T3 | the x-axis of the canonical reference frame, that is tangent to both centrodes l3 and λ3, |
| T | homogeneous transformation matrix |
| α-curve | (strophoids) circular cubic curves with a node where the tangents are orthogonal |
| αi (i = 1, 2, 3, 4) | the magnitude of the angular acceleration of link i, expressed in [rad/s2] |
| αi (i = 1, 2, 3, 4) | the angular acceleration vector of link i, expressed as [0 0 αi] |
| β | the oriented angle between the X-axis and T3 |
| δ | the diameter of the inflection circle I3. |
| θi (i = 1, 2, 3, 4) | the counterclockwise angle between the position vector ri and a reference axis X, measured in radians [rad]. |
| λ3 | fixed centrode of coupler link 3 |
| τ23 | angular velocity ratio between the coupler link 3 and the input link 2, (adjacent to the frame), [dimensionless] |
| τ24 | angular velocity ratio between the input link 2 and the output link 4, (adjacent to the frame), [dimensionless] |
| τ43 | angular velocity ratio between the coupler link 3 and the frame-adjacent link 4, [dimensionless] |
| τR | relative angular velocity ratios between the coupler link and each of the frame-adjacent links, specifically, ω32 and ω34, [dimensionless] |
| ϕ-curve | a special case of a strophoid that degenerates into a circle and a straight line |
| φi (i = 1, 2, 3, 4) | the magnitude of the angular jerk of link i, expressed in [rad/s3] |
| φi (i = 1, 2, 3, 4) | the angular jerk vector of link i, expressed as [0 0 φi] |
| ψi (i = 1, 2, 3, 4) | the magnitude of the angular snap of link i, expressed in [rad/s4] |
| ψi (i = 1, 2, 3, 4) | the angular snap vector of link i, expressed as [0 0 ψi] |
| ωi (i = 1, 2, 3, 4) | the magnitude of the angular velocity of link i, expressed in [rad/s]. |
| ωi (i = 1, 2, 3, 4) | the angular velocity vector of link i, expressed as [0 0 ωi] |
| Ψ | the angle made between the N3-axis with the oriented segment P3P of generic point P |
| ΨA | the angle made between the N3-axis with the oriented segment P3A |
| ΨB | the angle made between the N3-axis with the oriented segment P3B |
| ) ( - curve (equilateral hyperbola) | a special case of a strophoid that degenerates into an equilateral hyperbola and the line at infinity. |
References
- Freudenstein, F. On the Maximum and Minimum Velocities and the Accelerations in Four-Link Mechanisms. Trans. Am. Soc. Mech. Eng. 1956, 78, 779–785. [Google Scholar] [CrossRef]
- Wu, L.-I.; Wu, S.-H. A note on Freudenstein’s theorem. Mech. Mach. Theory 1998, 33, 139–149. [Google Scholar] [CrossRef]
- Goessner, S. Vectorial Proof of the Freudenstein Theorem. 2019. Available online: https://www.researchgate.net/publication/336262310_Vectorial_Proof_of_the_Freudenstein_Theorem (accessed on 9 July 2025).
- Hayes, M.J.D.; Rotzoll, M.; Iraei, A.E.; Nichol, A.; Bucciol, Q. Algebraic Differential Kinematics of Planar 4R Linkages. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2021; pp. 1060–1065. [Google Scholar]
- Dijksman, E.A.; Smals, A.T.J.S. Symmetrical coupler curves approximating a straight-line (degenerate case). In Proceedings of the First International Applied Mechanical Systems Design Conference (IAMSDC-1), Nashville, TN, USA, 11–14 June 1989; pp. P33.17–P33.31. [Google Scholar]
- Chiang, C.H. Simplified graphical acceleration analysis of four-bar linkages. J. Mech. 1970, 5, 549–562. [Google Scholar] [CrossRef]
- Dijksman, E.A. Jerk-free Geneva wheel driving. J. Mech. 1966, 1, 235–283. [Google Scholar] [CrossRef]
- Claussen, U.; Dizioǧlu, B. The special cases of the circling-point curve and centering-point curve for the general four-bar linkage. J. Mech. 1966, 1, 145–154. [Google Scholar] [CrossRef]
- Wu, L.; Cai, J.; Dai, J.S. Analyzing Higher-Order Curvature of Four-Bar Linkages with Derivatives of Screws. Machines 2024, 12, 576. [Google Scholar] [CrossRef]
- Eddie Baker, J. Screw system algebra applied to special linkage configurations. Mech. Mach. Theory 1980, 15, 255–265. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. Singularity analysis of closed-loop kinematic chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
- Kimbrell, J.E.; Hunt, K.H. Coupler point-paths and line-envelopes of 4-bar linkages in asymptotic configurations. Mech. Mach. Theory 1981, 16, 311–320. [Google Scholar] [CrossRef]
- Chase, T.R.; Mirth, J.A. Circuits and Branches of Single-Degree-of-Freedom Planar Linkages. J. Mech. Des. 1993, 115, 223–230. [Google Scholar] [CrossRef]
- Chung, W.-Y. Double configurations of five-link Assur kinematic chain and stationary configurations of Stephenson six-bar. Mech. Mach. Theory 2007, 42, 1653–1662. [Google Scholar] [CrossRef]
- Pennock, G.R.; Kamthe, G.M. Study of Dead-Centre Positions of Single-Degree-of-Freedom Planar Linkages Using Assur Kinematic Chains. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2006, 220, 1057–1074. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Wang, L.T. On the dead-centre position analysis of Stephenson six-link linkages. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2006, 220, 1393–1404. [Google Scholar] [CrossRef]
- Yan, H.-S.; Wu, L.-I. The stationary configurations of planar six-bar kinematic chains. Mech. Mach. Theory 1988, 23, 287–293. [Google Scholar] [CrossRef]
- Yan, H.-S.; Wu, L.-L. On the Dead-Center Positions of Planar Linkage Mechanisms. J. Mech. Transm. Autom. Des. 1989, 111, 40–46. [Google Scholar] [CrossRef]
- Veldkamp, G.R. The instantaneous motion of a line in a t-position. Mech. Mach. Theory 1983, 18, 439–444. [Google Scholar] [CrossRef]
- Figliolini, G.; Lanni, C.; Tomassi, L. Synthesis and Analysis of Stephenson III Six-Bar Motion Generators With an Instantaneous Stop Link. J. Mech. Robot. 2024, 17, 044510. [Google Scholar] [CrossRef]
- Figliolini, G.; Lanni, C.; Tomassi, L. First- and Second-Order Centrodes of Both Coupler Links of Stephenson III Six-Bar Mechanisms. Machines 2025, 13, 93. [Google Scholar] [CrossRef]
- Figliolini, G.; Pennestrì, E. Synthesis of Quasi-Constant Transmission Ratio Planar Linkages. J. Mech. Des. 2015, 137, 102301. [Google Scholar] [CrossRef]
- Figliolini, G.; Lanni, C.; Tomassi, L.; Ortiz, J. Eight-Bar Elbow Joint Exoskeleton Mechanism. Robotics 2024, 13, 125. [Google Scholar] [CrossRef]
- Lanni, C.; Figliolini, G.; Tomassi, L. Higher-Order Centrodes and Bresse’s Circles of Slider-Crank Mechanisms. In Proceedings of the ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 20–23 August 2023. [Google Scholar]
- Stachel, H. Strophoids, a family of cubic curves with remarkable properties. J. Ind. Des. Eng. Graph. 2015, 10, 65–72. [Google Scholar]
- Dijksman, E.A. Motion Geometry of Mechanisms; Cambridge University Press: Cambridge, UK, 1976. [Google Scholar]
- Hunt, K.H. Kinematic Geometry of Mechanisms; Clarendon Press: Oxford, UK, 1978. [Google Scholar]
- Cera, M.; Pennestri, E. Engineering Kinematics: Curvature Theory of Plane Motion; Amazon Digital Services LLC—Kdp: Seattle, WA, USA, 2023. [Google Scholar]
- Lakshminarayana, K. On the Carter-Hall circle and its application. J. Mech. 1971, 6, 517–532. [Google Scholar] [CrossRef]
- Dijksman, E.A. Coordination of Coupler-Point Positions and Crank Rotations in Connection with Roberts’ Configuration. J. Eng. Ind. 1969, 91, 55–65. [Google Scholar] [CrossRef]
- Chiang, C.H. Kinematics and Design of Planar Mechanisms; Krieger Publishing Company: Malabar, FL, USA, 2000. [Google Scholar]
- Hartenberg, R.S.; Denavit, J. Kinematic Synthesis of Linkages; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Hirschhorn, J. Kinematics and Dynamics of Plane Mechanisms; McGraw-Hill: New York, NY, USA, 1962. [Google Scholar]
- Hain, K. Applied Kinematics; McGraw-Hill: New York, NY, USA, 1967. [Google Scholar]
- Li, J.; Hu, Y.; Yang, S.X. A Novel Knowledge-Based Genetic Algorithm for Robot Path Planning in Complex Environments. IEEE Trans. Evol. Comput. 2025, 29, 375–389. [Google Scholar] [CrossRef]
- Sheta, A.N.; Sedhom, B.E.; Pal, A.; Moursi, M.S.E.; Eladl, A.A. Machine-Learning-Based Adaptive Settings of Directional Overcurrent Relays With Double-Inverse Characteristics for Stable Operation of Microgrids. IEEE Trans. Ind. Inform. 2025, 21, 584–593. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case of Study | r1 (A0B0) [mm] | r2 (A0A) [mm] | r3 (AB) [mm] | r4 (B0B) [mm] | Figures |
|---|---|---|---|---|---|
| Case 1: Crank-rocker | 250 | 80 | 200 | 190 | Figure 8, Figure 9, Figure 10, Figure 11 and Figure 12 |
| Case 2: Crank-rocker | 400 | 100 | 400 | 300 | Figure 13 |
| Case 3: Crank-rocker | 400 | 100 | 400 | 400 | Figure 14 |
| Case 4: Double-crank | 100 | 220 | 185 | 180 | Figure 15, Figure 16, Figure 17 and Figure 18 |
| Case 5: Double-rocker | 350 | 280 | 180 | 400 | Figure 19, Figure 20, Figure 21 and Figure 22 |
| Case 6: Triple-rocker | 100 | 110 | 200 | 150 | Figure 23, Figure 24, Figure 25 and Figure 26 |
| Values | θ2 [°] | ku | ka | Conditions | Figure | ||
|---|---|---|---|---|---|---|---|
| τ24MIN | −0.5236 | 343.7667 | ϕ-curve | α-curve | c.a. ⊥ AB | Figure 9b | |
| τ24MAX | 0.4258 | 119.8000 | ϕ-curve | α-curve | c.a. ⊥ AB | Figure 9a | |
| τ24 | 0 | 41.5333 | α-curve | ϕ-curve | c.a. in-line AB | P3 ≡ B, P24 ≡ A0 | Figure 9c |
| τ24 | 0 | 227.1667 | α-curve | ϕ-curve | c.a. in-line AB | P3 ≡ B, P24 ≡ A0 | Figure 9d |
| τ23MIN | −0.5022 | 12.7333 | ϕ-curve | ϕ-curve | c.a. ⊥ B0B | Figure 10a | |
| τ23MAX | 0.4059 | 237.4333 | ϕ-curve | ϕ-curve | c.a. ⊥ B0B | Figure 10b | |
| τ23 | 0 | 128.9667 | ) ( - curve | ) ( - curve | c.a. || A0A || B0B | P3→∞ | Figure 10c |
| τ23 | 0 | 314.9667 | ) ( - curve | ) ( - curve | c.a. || A0A || B0B | P3→∞ | Figure 10d |
| τ43 | 1 | 0 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ B0, P24 ≡ A | Figure 11a |
| τ43 | 1 | 180.0000 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ B0, P24 ≡ A | Figure 11b |
| τRMINREL | 2.5150 | 102.3667 | α-curve | ϕ-curve | c.a. ⊥ A0B0 | Figure 12a | |
| τRMAXREL | −1.2017 | 257.1000 | α-curve | ϕ-curve | c.a. ⊥ A0B0 | Figure 12b | |
| Values | θ2 [°] | ku | ka | Conditions | Figure | ||
|---|---|---|---|---|---|---|---|
| τ24MIN | 0.4390 | 243.5667 | ϕ-curve | α-curve | c.a. ⊥ AB | Figure 16a | |
| τ24MAX | 1.8771 | 8.4667 | ϕ-curve | α-curve | c.a. ⊥ AB | Figure 16b | |
| τ24 | 1 | 128.3667 | ϕ-curve | ϕ-curve | c.a. || A0B0 || AB | P24→∞ | Figure 16c |
| τ24 | 1 | 320.8333 | ϕ-curve | ϕ-curve | c.a. || A0B0 || AB | P24→∞ | Figure 16d |
| τ23MIN | 0.4528 | 118.1667 | ϕ-curve | ϕ-curve | c.a. ⊥ B0B | Figure 17a | |
| τ23MAX | 1.8600 | 353.3333 | ϕ-curve | ϕ-curve | c.a. ⊥ B0B | Figure 17b | |
| τ23 | 1 | 41.2667 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ A0, P24 ≡ B | Figure 17c |
| τ23 | 1 | 234.2333 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ A0, P24 ≡ B | Figure 17d |
| τ43MIN | 0.4207 | 104.1000 | ϕ-curve | ϕ-curve | c.a. ⊥ A0A | Figure 18a | |
| τ43MAX | 2.4292 | 256.7333 | ϕ-curve | ϕ-curve | c.a. ⊥ A0A | Figure 18b | |
| τ43 | 1 | 0 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ B0, P24 ≡ A | Figure 18c |
| τ43 | 1 | 180.0000 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ B0, P24 ≡ A | Figure 18d |
| Values | θ2 [°] | ku | ka | Conditions | Figure | ||
|---|---|---|---|---|---|---|---|
| τ24 | 0 | 57.2667 | α-curve | ϕ-curve | c.a. in-line AB | P3 ≡ B, P24 ≡ A0 | Figure 20a |
| τ24 | 1 | 123.6000 | ϕ-curve | ϕ-curve | c.a. || A0B0 || AB | P24→∞ | Figure 20b |
| τ23MAX | −0.6733 | 103.1000 | ϕ-curve | ϕ-curve | c.a. ⊥ B0B | Figure 21 | |
| τ43MAXREL | −0.8487 | 112.4333 | ϕ-curve | ϕ-curve | c.a. ⊥ A0A | Figure 22 | |
| Values | θ2 [°] | ku | ka | Conditions | Figure | ||
|---|---|---|---|---|---|---|---|
| τ24 | 0 | 284.1333 | α-curve | ϕ-curve | c.a. in-line A0A | P3 ≡ B, P24 ≡ A0, | Figure 24a |
| τ24 | 1 | 88.9667 | ϕ-curve | ϕ-curve | c.a. || A0B0 || AB | P24→∞ | Figure 24b |
| τ23 | 0 | 316.3000 | ) ( - curve | ) ( - curve | c.a. || A0A || B0B | P3→∞ | Figure 25a |
| τ23 | 1 | 51.0000 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ A0, P24 ≡ B | Figure 25b |
| τ43 | 1 | 180.0000 | ϕ-curve | α-curve | c.a. in-line A0B0 | P3 ≡ B0, P24 ≡ A | Figure 26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Figliolini, G.; Lanni, C.; Tomassi, L. Algorithm to Find and Analyze All Configurations of Four-Bar Linkages with Different Geometric Loci Degenerate Forms. Symmetry 2025, 17, 1171. https://doi.org/10.3390/sym17081171
Figliolini G, Lanni C, Tomassi L. Algorithm to Find and Analyze All Configurations of Four-Bar Linkages with Different Geometric Loci Degenerate Forms. Symmetry. 2025; 17(8):1171. https://doi.org/10.3390/sym17081171
Chicago/Turabian StyleFigliolini, Giorgio, Chiara Lanni, and Luciano Tomassi. 2025. "Algorithm to Find and Analyze All Configurations of Four-Bar Linkages with Different Geometric Loci Degenerate Forms" Symmetry 17, no. 8: 1171. https://doi.org/10.3390/sym17081171
APA StyleFigliolini, G., Lanni, C., & Tomassi, L. (2025). Algorithm to Find and Analyze All Configurations of Four-Bar Linkages with Different Geometric Loci Degenerate Forms. Symmetry, 17(8), 1171. https://doi.org/10.3390/sym17081171