1. Introduction
Fractional differential equations (FDEs) generalize classical differential equations by allowing derivatives of non-integer order, offering a robust framework for describing complex systems with memory and hereditary characteristics. The foundations of fractional calculus date back to the 17th century, notably through correspondence between Gottfried Wilhelm Leibniz and Guillaume de L’Hôpital, where the idea of non-integer-order derivatives was first discussed. Since then, the theory has been systematically advanced by prominent mathematicians including Joseph Liouville, Bernhard Riemann, Hermann Weyl, and Marcel Riesz.
In contemporary research, fractional calculus has emerged as a powerful tool in diverse fields of science and engineering. Its ability to model nonlocal and history-dependent behaviors makes FDEs especially effective in capturing the dynamics of systems characterized by anomalous diffusion and long-range temporal dependencies. As a result, they have been successfully applied to problems in physics, biology, control theory, economics, and engineering; see [
1,
2,
3,
4,
5].
Research on FDEs parallels the theory of classical ordinary differential equations (ODEs), focusing on three fundamental problems: the existence of solutions, the uniqueness of solutions, and stability analysis. These questions constitute the core of the well-posedness problem, ensuring mathematical rigor in modeling.
The existence of solutions to FDEs is a foundational aspect that guarantees the mathematical viability of these models. Researchers have employed various techniques—such as fixed point theory—to establish both the existence and uniqueness of solutions under specific conditions. For instance, recent studies have shown that classical mathematical methods can effectively address the challenges posed by fractional derivatives, thereby enhancing our understanding of these equations; see the monographs [
6,
7].
In addition to existence results, the stability of solutions is another crucial area of investigation. Various stability concepts have been developed, each suited to different types of perturbations and modeling scenarios. In the context of FDEs, notions such as Lyapunov stability, asymptotic stability, Mittag–Leffler stability, and Ulam stability are commonly used, as they play a vital role in assessing how small perturbations in the initial conditions or parameters of FDEs affect the behavior of solutions over time.
Recently, researchers have shown great interest in Ulam-type stability concepts such as Ulam–Hyers stability, Ulam–Hyers–Rassias stability, and their generalizations; see [
8,
9,
10,
11,
12] and the references cited therein. These stability frameworks not only provide insight into the robustness of solutions but also facilitate the development of numerical methods for solving fractional differential equations.
Overall, the exploration of existence and stability in fractional differential equations represents a rich field of research that bridges theoretical mathematics with practical applications. As researchers continue to uncover new results and methodologies, the implications for modeling real-world systems become increasingly profound, underscoring the importance of this area within the broader context of fractional calculus.
Various types of fractional derivatives have been introduced, among which the Riemann–Liouville fractional derivative and the Caputo fractional derivative are the most widely used. The Hilfer fractional derivative was introduced by Rudolf Hilfer in 1996. This derivative is notable for its two-parameter family, which generalizes both the Caputo and Riemann–Liouville fractional derivatives. The Hilfer derivative allows for interpolation between these two well-known definitions of fractional derivatives, providing greater flexibility in applications. It has spurred extensive research on Hilfer-type FDEs, as exemplified below:
Furati et al. [
13] investigated the existence of solutions for Hilfer fractional differential equations with fractional integral initial conditions, given by
where
is the Hilfer fractional derivative of order
, type
,
is the Riemann–Liouville fractional integral of order
, and
is a given function. They proved the existence and uniqueness of global solutions in the space of weighted continuous functions. The stability of the solution for a weighted Cauchy-type problem is also analyzed.
Dhaigude et al. [
14] studied the existence and uniqueness of solutions for Hilfer fractional differential equations involving Hilfer fractional derivatives with fractional integral initial conditions, given by
where
is the Hilfer fractional derivative of order
and type
;
is the Riemann–Liouville fractional integral of order
, with
; and
is a given function.
In 2018, Vivek et al. [
15] studied the existence, uniqueness, and stability of solutions for an implicit differential equation with a nonlocal condition involving the Hilfer fractional derivative, given by
where
is the Hilfer fractional derivative with
and
and
is a given continuous function. The operator
denotes the left-sided Riemann–Liouville fractional integral of order
. The coefficients
are real constants, and the points
for
are fixed such that
.
Motivated by the ongoing research on Hilfer fractional differential problems, this paper establishes the
existence,
uniqueness, and
stability of solutions in weighted function spaces for a class of
nonlinear implicit Hilfer FDEs:
subject to the initial conditions
where
denotes the Hilfer fractional derivative of order
and type
. The operator
, where
is the standard derivative of integer order
and
denotes the Riemann–Liouville fractional integral of order
, with
. Here,
is a given function.
We employ fixed-point theorems to establish the existence and uniqueness of solutions while developing a generalized Gronwall inequality with singular kernels to investigate both continuous dependence on initial data and stability properties—particularly Ulam–Hyers stability and its variants. Concrete examples are presented to demonstrate the applicability of these theoretical results.
The class of nonlinear implicit Hilfer FDEs with
general fractional order, considered in this paper, has broad applicability in modeling complex dynamical systems with memory and hereditary properties. Such equations naturally arise in physical and engineering systems where the current state depends not only on the present input but also on a nonlinear relationship involving the fractional derivative of the unknown function. A representative application can be found in viscoelastic materials, where the stress–strain relationship incorporates both time-fractional behavior and implicit constitutive laws. The implicit nature of the general fractional-order Equation (
1) enables the modeling of feedback mechanisms or damping forces that depend on both the state and its rate of change, expressed through the Hilfer derivative.
Additionally, such implicit Hilfer FDEs are relevant in systems biology, anomalous transport processes in porous media, and fractional electrical circuits with memory-dependent components. In each of these cases, ensuring the existence, uniqueness, and stability of solutions is essential for the mathematical soundness and predictive power of the model. The results established in this paper—framed in weighted function spaces—provide a theoretical foundation for the analysis and simulation of such real-world systems.
The importance of weighted function spaces lies in their ability to capture the singular behavior often exhibited by solutions of fractional differential equations, particularly near boundary points. These spaces enable finer control over regularity and integrability properties, which is essential when working with fractional operators that involve singular kernels or nonlocal effects. As such, they are indispensable tools in establishing well-posedness and stability results in the fractional calculus framework.
The remainder of this paper is organized as follows.
Section 2 introduces fundamental definitions, notations, and preliminary results, including the generalized Hilfer fractional derivative and the relevant solution spaces.
Section 3 presents our main theoretical contributions, featuring a novel integral inequality with singular kernels.
Section 4 establishes existence and uniqueness results for solutions. In
Section 5, we investigate Ulam–Hyers-type stability concepts, encompassing classical, generalized, Rassias, and generalized Rassias stability.
Section 6 examines continuous dependence on initial data, while
Section 7 provides illustrative examples demonstrating the applicability of our theoretical framework.
Section 8 discusses the broader implications of our results, and
Section 9 concludes the paper with final remarks.
2. Preliminaries
2.1. Definitions and Lemmas
In this section, we present fundamental definitions and lemmas. Let
, and let
denote the space of Lebesgue integrable functions, and
the space of continuous functions on
. For
and
, we define the following weighted spaces of continuous functions:
which means
may have a singularity at
, controlled by
and
where
, with norms
and
These spaces satisfy the following properties:
, , and
and for
Fractional calculus extends traditional integration and differentiation to non-integer orders, with foundational work by Riemann and Liouville in the 19th century.
Definition 1 (Riemann–Liouville fractional integral [
2]).
For a function , the left-sided Riemann–Liouville fractional integral of order is defined as where Γ
is the Gamma function defined by When , this integral coincides with the n-fold iterated integral. The following lemmas describe mapping properties of .
Lemma 1 ([
2]).
For , maps into . Lemma 2 ([
2]).
For and , if , then is bounded from into . Lemma 3 ([
2]).
For and , if , then is bounded from into . Remark 1. From Lemmas 2 and 3, if and , then is bounded from into .
The semigroup property of the fractional integration is given by
Lemma 4 ([
2]).
Let , and . Then for all . Lemma 5 ([
13]).
Let and . Then Below, we formalize the Riemann–Liouville derivative for functions in a Lebesgue space.
Definition 2 (Riemann–Liouville fractional derivative [
2]).
For a function , the left-sided Riemann–Liouville fractional derivative of order is defined as The following lemma provides a sufficient condition for the existence of the Riemann–Liouville fractional derivative.
Lemma 6 ([
2]).
Let and . If , then the Riemann–Liouville fractional derivative exists on . For power functions, we have the following properties:
Lemma 7 ([
2]).
For , , and :- (i)
- (ii)
- (iii)
The following lemma shows that fractional differentiation is the left-inverse operation to fractional integration:
Lemma 8 ([
2]).
Let , , and . Then for any . We derive composition relations between fractional differentiation and integration operators:
Lemma 9 ([
2]).
Let , , and . Then for any . The composition of fractional integration with fractional differentiation is given by
Lemma 10 ([
2]).
If , , , , and , then for any . The Caputo derivative, introduced by Michele Caputo in 1967, modifies the Riemann–Liouville definition for more practical applications:
Definition 3 (Caputo fractional derivative [
2]).
For a function , the left-sided Caputo fractional derivative of order is defined as 2.2. Generalized Cauchy Problem
In this section, we formulate the Cauchy-type problem (
1) and (
2), introduce the concept of a generalized derivative, and define the corresponding solution spaces.
A generalization of both Riemann–Liouville and Caputo derivatives was introduced by R. Hilfer:
Definition 4 (Hilfer fractional derivative [
16]).
Let and . For a function , the left-sided Hilfer fractional derivative of order α and type β is defined as where , . Remark 2. The following follows from Definition 4.
- 1.
The Hilfer fractional derivative can be written as - 2.
The Hilfer derivative interpolates between Riemann–Liouville and Caputo derivatives: - 3.
For , the parameters and satisfy the following properties:
- 3.1
γ is a convex combination:
- 3.2
strictly when
- 3.3
- 3.4
We introduce the weighted function subspace:
of
where
is Riemann–Liouville fractional derivatives of order
with norms
When the order , the following lemma provides a sufficient condition for the existence of the Hilfer fractional derivative.
Lemma 11. Let , , , and . If , then the Hilfer fractional derivative exists and belongs to the weighted space .
Proof. Let
. Then
. By Remark 1, we obtain that
This completes the proof. □
The following lemmas are a direct consequence of the semigroup property in Lemma 4.
Lemma 12. Let , , and . If , thenand Proof. From Lemma 4 and Definition 4, we have
Similarly, by Definition 2 and Lemma 4, we obtain
Hence, the proof is complete. □
Lemma 13. Let , , , and . If and , then exists in and Proof. Since
, we have
Given that
and
, it follows from Remark 2, 3.3 and 3.4 that
and
respectively. Applying Definition 4, Lemma 4, Definition 2, and Lemma 10, we obtain
Since
, Lemma 5 implies
, which completes the proof. □
2.3. Fixed-Point Theorems and Ulam Stability Definitions
We will employ the following classical fixed-point theorems in Banach spaces to establish the existence and uniqueness of solutions for our nonlinear implicit Hilfer fractional differential problem.
Theorem 1 (Schaefer’s fixed-point theorem [
17]).
Let X be a Banach space and be completely continuous (i.e., is continuous and maps bounded sets to relatively compact sets). Consider the set Then either is unbounded, or has at least one fixed point. Theorem 2 (Banach’s fixed-point theorem [
18]).
Let X be a Banach space, a nonempty closed subset, and a contraction mapping (i.e., there exists such that for all ). Then has a unique fixed point in D. In this paper, we also investigate the stability of solutions to the Cauchy-type problem (
1) and (
2), with particular emphasis on the continuity of solutions under small perturbations to the differential equation, while maintaining the initial conditions. In other words, we examine the stability of the fractional differential Equation (
1) in the sense of Ulam. Specifically, we consider and analyze four distinct notions of Ulam-type stability: Ulam–Hyers stability, generalized Ulam–Hyers stability, Ulam–Hyers–Rassias stability, and generalized Ulam–Hyers–Rassias stability.
Let
, parameter
, with
and
. We consider the Hilfer fractional differential equation (
1) along with the following inequalities:
The four types of Ulam stability for the fractional differential Equation (
1) are given by the following definition.
Definition 5 (Ulam–Hyers-stable [
8]).
Equation (1) is Ulam–Hyers-stable (UH-stable) if there exists a constant such that for each and for each solution of inequality (3), there exists a solution of Equation (1) satisfying Definition 6 (Generalized Ulam–Hyers-stable [
8]).
Equation (1) is generalized Ulam–Hyers-stable (GUH-stable) if there exists a continuous function with such that for each solution of inequality (3), there exists a solution of Equation (1) satisfying Definition 7 (Ulam–Hyers–Rassias-stable [
8]).
Equation (1) is Ulam–Hyers–Rassias-stable (UHR-stable) with respect to if there exists a constant such that for each and for each solution of inequality (4), there exists a solution of Equation (1) satisfying Definition 8 (Generalized Ulam–Hyers–Rassias-stable [
8]).
Equation (1) is generalized Ulam–Hyers–Rassias-stable (GUHR-stable) with respect to if there exists a constant such that for each solution of inequality (5), there exists a solution of Equation (1) with Remark 3. The following implications hold: (i) Definition 5 ⇒ Definition 6; (ii) Definition 7⇒ Definition 8; (iii) Definition 7⇒ Definition 5.
Remark 4. A function is a solution of inequality (3) if and only if there exists a function such that andSimilar observations apply to inequalities (4) and (5). The key differences among these stability concepts lie in the nature of perturbations considered and the level of generality in their associated conditions. Ulam–Hyers (UH) stability focuses on basic robustness to small perturbations around exact solutions. Ulam–Hyers–Rassias (UHR) stability extends this framework by allowing more flexible perturbations through the inclusion of additional parameters. Generalized Ulam–Hyers (GUH) stability broadens UH stability to accommodate a wider class of fractional differential equations and more complex perturbations. Generalized Ulam–Hyers–Rassias (GUHR) stability further combines this generalization with parameterized perturbations, offering a comprehensive analytical framework that integrates the strengths of both GUH and UHR stability.
Each stability concept provides distinct insights into the behavior of solutions under varying conditions. The appropriate notion depends on the specific features of the problem at hand, particularly the type of perturbation and the nature of the differential equation. These stability frameworks are especially significant in the context of fractional differential equations, where they play a crucial role in assessing the reliability of mathematical models.
5. Ulam Stability Results
Finally, we examine four distinct types of Ulam stability for the nonlinear implicit Hilfer fractional differential Equation (
1).
Theorem 6. Assume that holds. If , where Λ is defined in (24), then Equation (1) is UH-stable, and hence GUH-stable. Proof. Let
and
be a function that satisfies the inequality (
3):
By Remark 4, there is
such that
and
where
Taking the Riemann–Liouville fractional integral of order α in Equation (
31), we obtain, for
,
for some
. Taking into account that
, we multiply both sides of the above equation by
. From this it follows that
for any
. We consider a solution
to the Cauchy problem:
By Lemma 17, we have Equation (
15):
where
Using
and Equation (
32), for
, we have
To apply Corollary 1, we require the assumption
and
. From Remark 2, 3.2, given that
,
, this assumption always holds for
but not necessarily for
. For this reason, we will divide our analysis into two cases.
Case I: or with .
By
, we have inequality (
29):
Then the inequality (
34) implies
Let
. The above inequality becomes
Because
, by virtue of Corollary 1, it implies that
Denote
Because the function
is continuous on any positive interval
, there exists a constant
such that
, for any
. Hence, the fractional differential Equation (
1) is Ulam–Hyers-stable.
By
, there exist nonnegative constants
with
such that
for any
. Then we can always choose three positive constants
with
such that
for any
. From this we have
Thus for any
, we have
or equivalently,
Then the inequality (
34) for
implies
for
. Let
. The above inequality becomes
Because
, by virtue of Theorem 3, it implies that
Denote
Because the function
is continuous on any positive interval
, there exists a constant
such that
, for any
. Hence, the fractional differential Equation (
1) is Ulam–Hyers-stable.
Case II.2: .
For this case, when , we can always choose three positive constants with such that
From this we have
Thus for any
, we have
or equivalently,
Then the inequality (
34) for
implies
Let
. The above inequality becomes
for
. Because
, by virtue of Theorem 3, it implies that
Now, we define
where
are positive constants such that
,
and
Therefore, for this case,
is piecewise continuous on
, and there is a constant
such that
, for any
. Hence, the fractional differential Equation (
1) is Ulam–Hyers-stable.
Moreover, for Case I and Case II, it is generalized Ulam–Hyers-stable, as , for any with , . This completes the proof. □
Theorem 7. Assume that and hold. If where Λ is defined in (24), then Equation (1) is UHR-stable, and hence GUHR-stable with respect to σ. Proof. Let
and
be a function that satisfies the inequality (
4):
By Remark 4, there is
such that
and satisfies (
31). Following a similar approach to the proof of Theorem 6, we obtain, for
,
for some
. Using
, it follows that
for any
. Let us denote by
a solution of the Cauchy problem (
33). By Lemma 17, we have Equation (
15). Using
and Equation (
38), for
, we have
Similarly, to prove the result in Theorem 6, we apply Corollary 1, which requires the assumption and . Given that for , this assumption always holds for but not necessarily for . For this reason, we divide our analysis into two cases, as in the proof of Theorem 6.
We then define the functions
,
, and
as in (
35), (
36), and (
37), respectively. Therefore, in each case, there exists a constant
such that
for any
. Hence, the fractional differential Equation (
1) is Ulam–Hyers–Rassias-stable with respect to σ. Moreover, it is generalized Ulam–Hyers–Rassias-stable with respect to σ; if we take
, then
, for any
. The assertion is proven. □
Remark 7. From the proof of Theorems 6 and 7, the constants , , and the function in Ulam stability definitions 5–8 are defined as follows:wherewith the functionswhere K and M are defined by hypothesis , and , , , , , are positive constants satisfying , , and 8. Discussion
Although this research investigates well-posedness for Cauchy-type problems involving nonlinear implicit Hilfer fractional differential equations with general order in weighted spaces—thereby extending previous work to a broader framework—certain limitations remain. Specifically, while our current analysis employs Schaefer’s and Banach’s fixed-point theorems for their robust guarantees, these approaches restrict the class of admissible FDE problems (requiring f to satisfy conditions and ). Nevertheless, the scope of fractional differential equation analysis can be further extended to more general classes by examining solution existence and uniqueness through alternative fixed-point frameworks. Below we present several powerful alternatives with their respective advantages:
Krasnoselskii fixed-point theorem;
Darbo fixed-point theorem;
Leray–Schauder fixed-point theorem;
Sadovskii fixed-point theorem;
Boyd–Wong fixed-point theorem.
Regarding initial/boundary conditions, this research focuses exclusively on initial value problems. However, the results can be extended to accommodate more general boundary conditions, including non-local or dynamic conditions.
While our current manuscript focuses on theoretical results, numerical implementations would significantly enhance the understanding of our findings. Several effective numerical methods exist for solving implicit fractional differential equations, each suited to different problem types:
Reformulation as Fractional Differential-Algebraic Equations (F-DAEs);
Predictor-Corrector Methods for Fractional Differential Equations (FDEs);
Implicit Fractional Linear Multistep Methods (FLMMs);
Spectral and Collocation Methods;
Adomian Decomposition Method (for analytical approximations);
Adams–Bashforth–Moulton (ABM) Method for implicit FDEs;
Spectral methods (particularly suitable for specific problem classes).
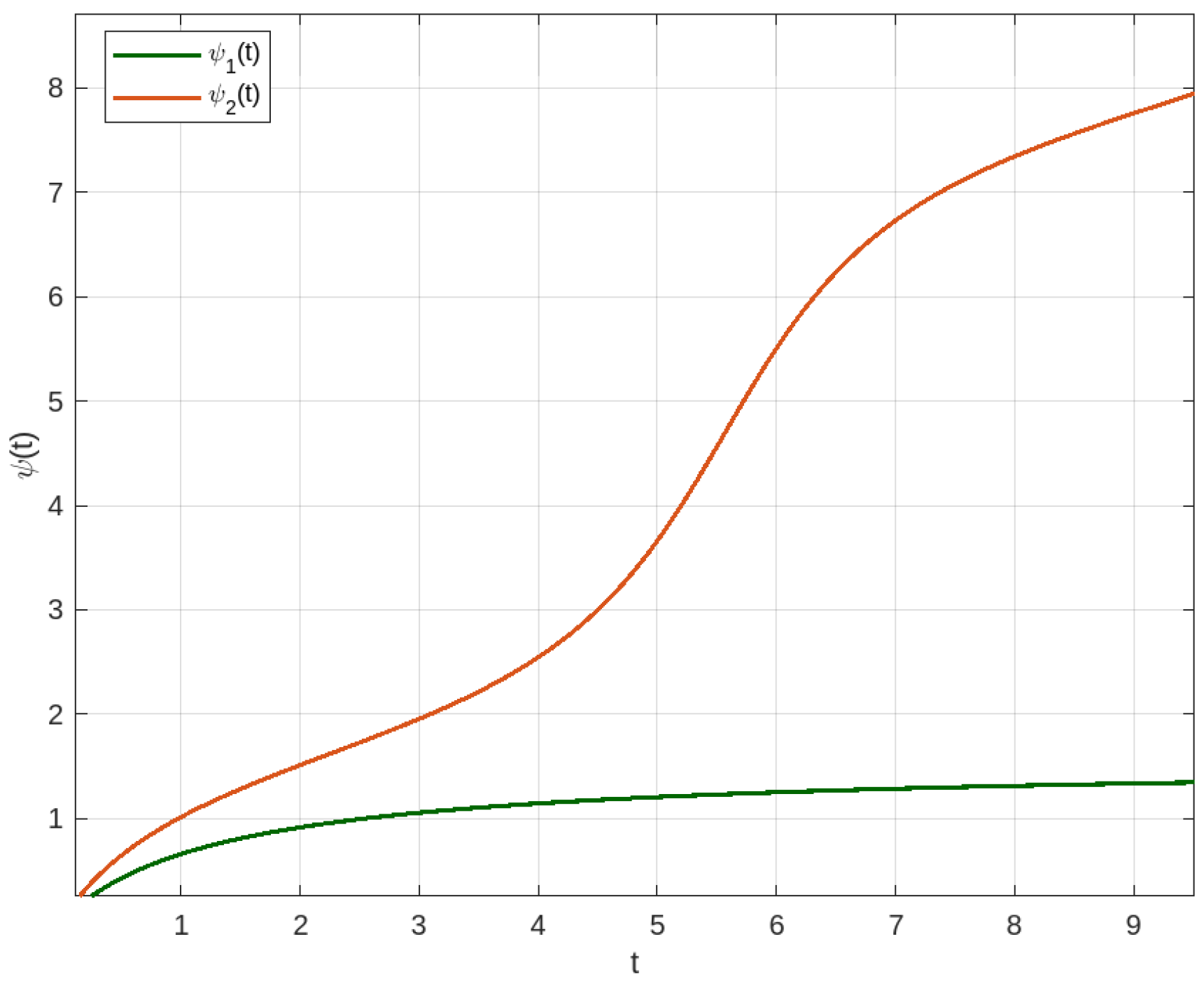
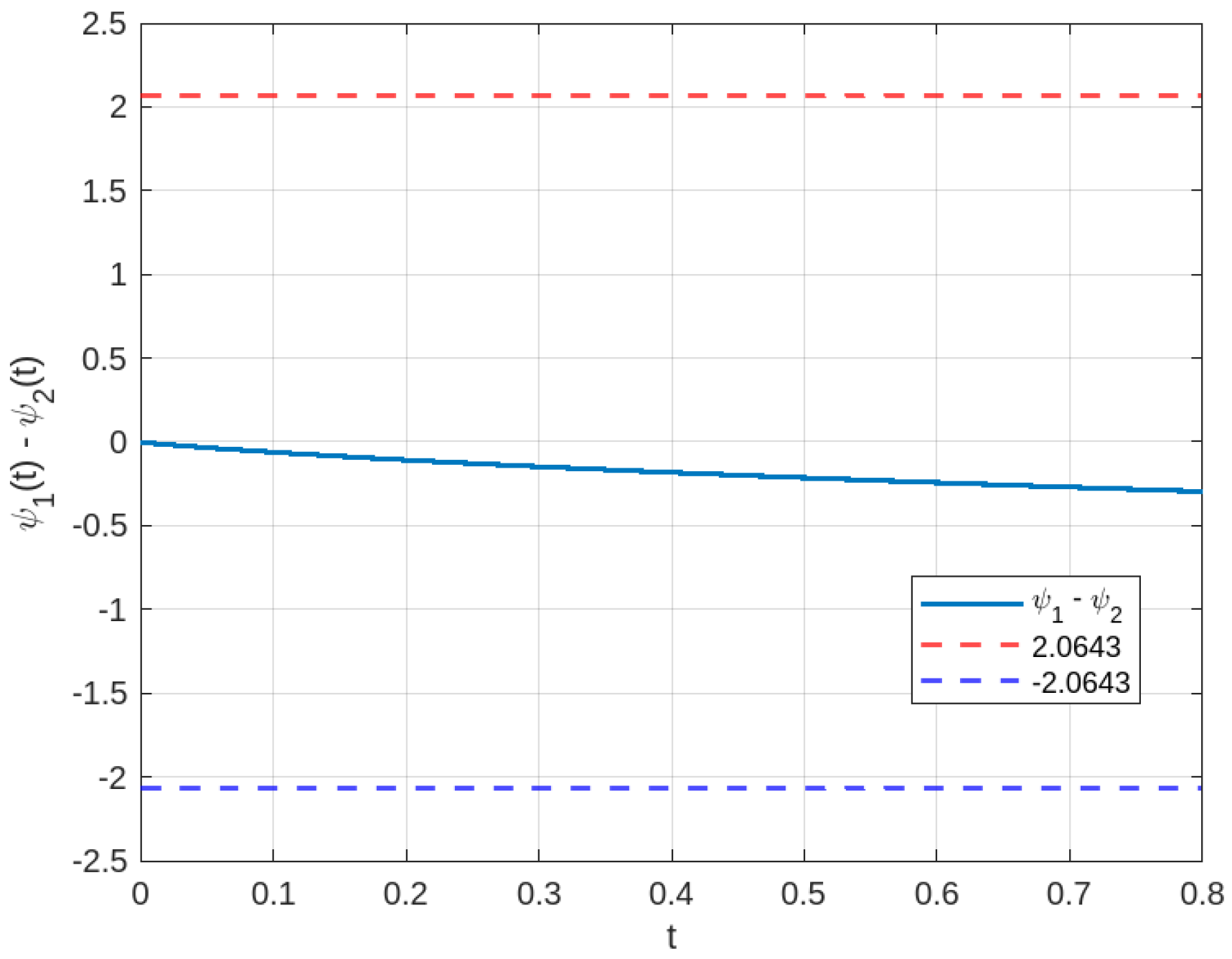
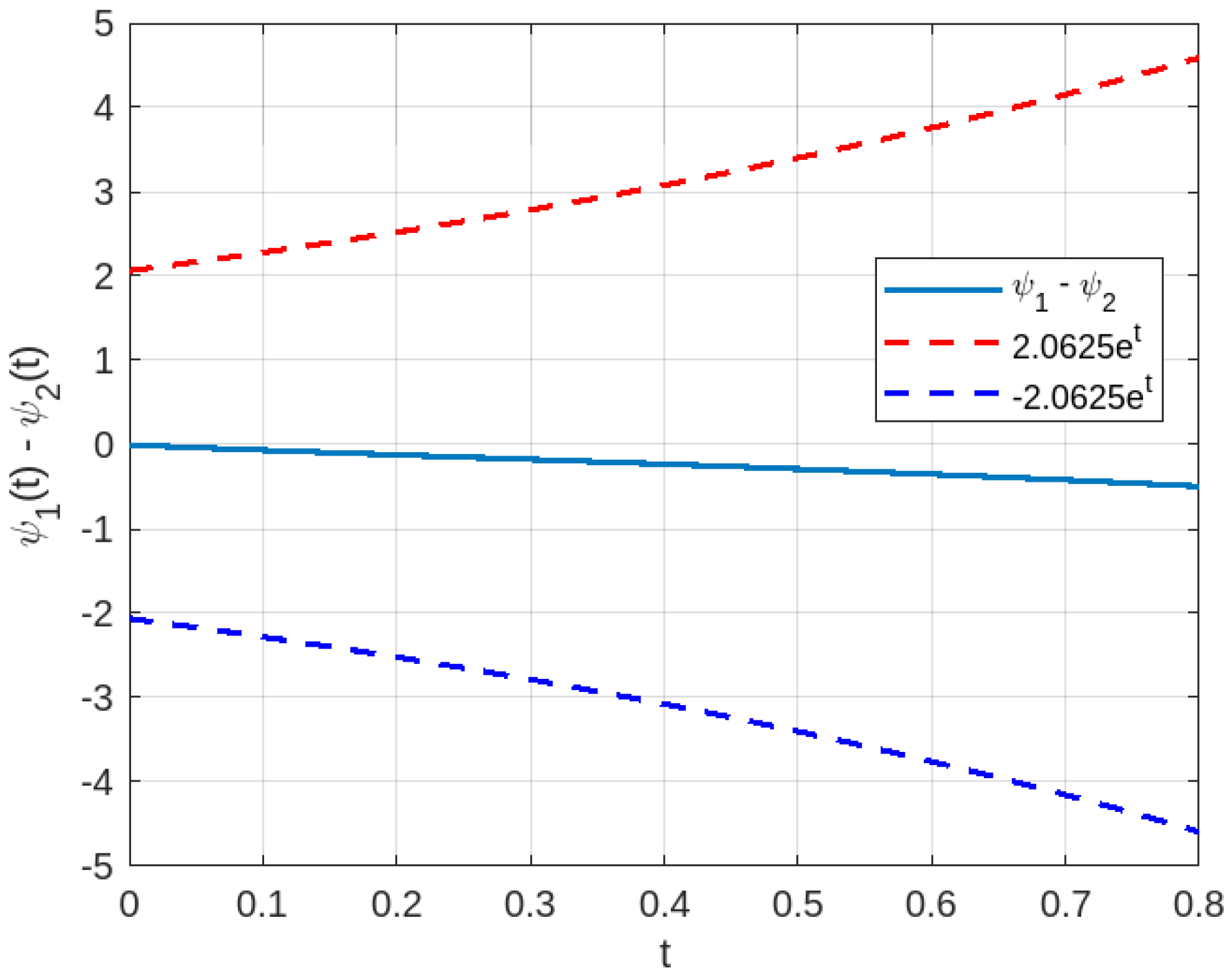
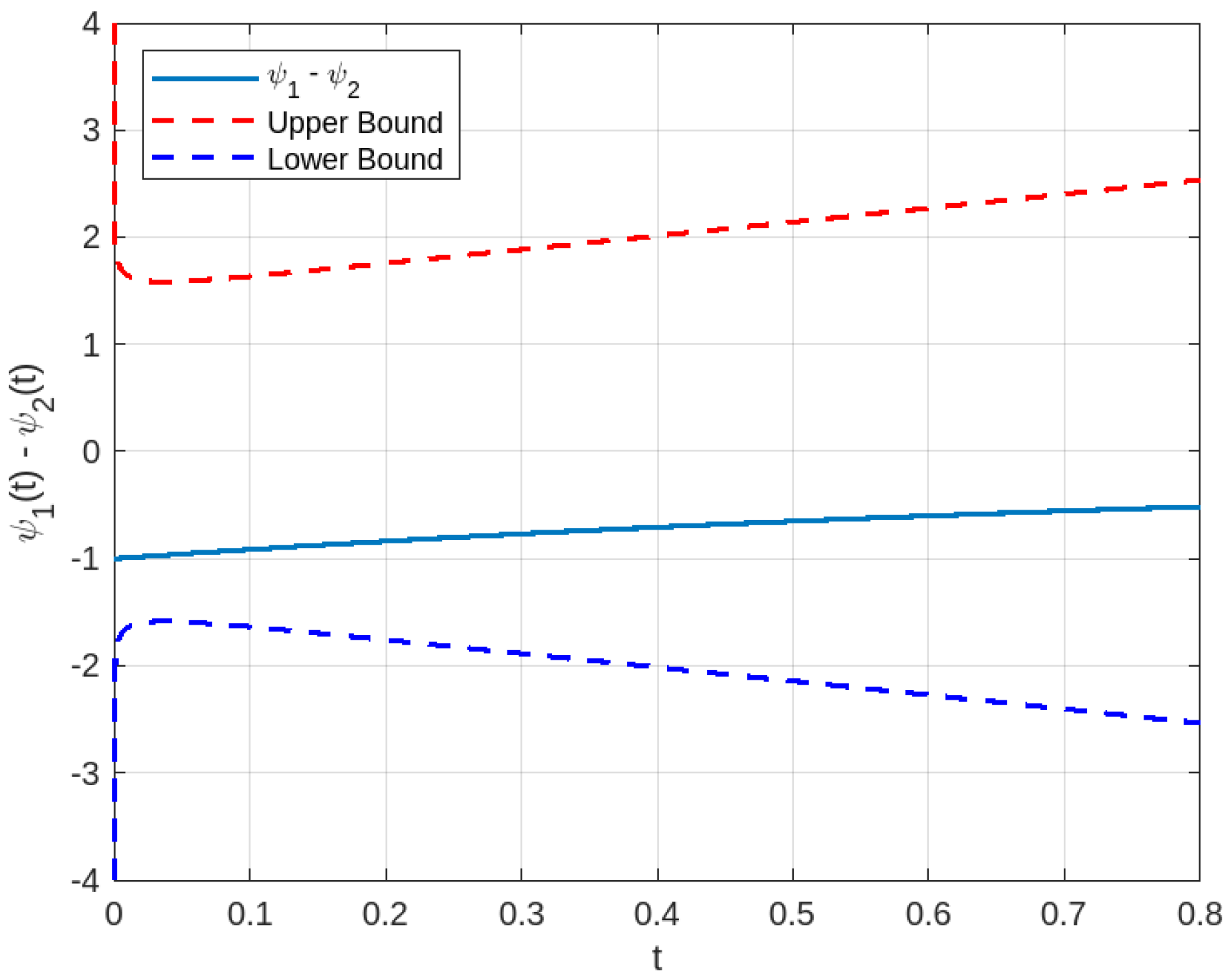
For the numerical simulations in Example 3, we employed the Adams–Bashforth–Moulton method in MATLAB R2025a to generate solution graphs and validate our theoretical results. This method was chosen for its optimal balance between computational efficiency and accuracy in solving implicit fractional differential equations.
In this study, we generalize Gronwall’s inequality as a key tool for analyzing stability and continuous dependence in constant-order fractional differential equations. Furthermore, we demonstrate the potential to extend this work to variable-order fractional problems by developing a generalized Gronwall-type inequality for variable-order fractional derivatives.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}