1. Introduction
This paper sets out to examine a system of parabolic Laplacian equations within the unit ball
with
provided that
s is a real number and
,
serves as a positive normalization constant, the value of which is determined by
n and
s. Meanwhile,
indicates the Cauchy Principal value.
For the integral to be well-defined in (
1), we stipulate that
, where the function
u also satisfies
Unlike local differential operators, the fractional Laplacian is nonlocal, integrating global information to define its value at a point. This nonlocality has made it a cornerstone in modeling nonlocal phenomena, sparking widespread research interest in fractional Laplacian equations [
1,
2,
3,
4,
5,
6,
7]. The inherent nonlocality of the fractional Laplacian presents a formidable barrier to its study. To overcome these difficulties, the moving plane method has turned out to be a key way for looking into the qualitative features of solutions to equations with nonlocal operators. For further references, see [
8,
9,
10].
In our paper, we use the direct moving plane method to investigate the radial symmetry and monotonic characteristics of solutions of parabolic Laplacian systems. A. D. Alexandrov originally put forward the renowned moving plane method to prove the Soap Bubble Theorem as mentioned in [
11]. From the moment it was initially proposed, the moving plane method has undergone significant refinements and extensions by various mathematicians, among whom Serrin’s work in 1971 [
12] stands as a notable milestone. Later on, a direct moving plane method was developed by Chen et al. [
10]; researchers used it in many applications, such as deriving monotonic, one-dimensional symmetric solutions of equations and systems involving fractional Laplacian operators [
13,
14,
15,
16].
Liu (2025) [
7] employed the direct moving plane method to prove the radial symmetric and monotonic solutions of parabolic fractional Laplacian equations; we generalize those results on fractional parabolic systems. In this system, the parabolic Laplacian operator related to
u is related to the function related to
v, and the parabolic Laplacian operator related to
v is related to the function related to
u, which has increased the complexity of the system; more contents related with fractional parabolic systems and constraint conditions on fractional parabolic systems can be seen in [
17]. We aim to prove that the solutions of the fractional parabolic equations in this system are radial symmetric and monotone. We adopt the setting in [
7], where
u only converges almost everywhere; this setting is an alternative or innovation to the method of setting a bound for
u and making sure that
u is uniformly convergent. Based on the underlying logic of maximum regularity in [
18], we indirectly regulate the fractional Laplacian operator based on convergent conditions of
u and
v, thus managing the eigenvalue of fractional Laplacian operator to ensure the existence of solutions. Next, we use the direct moving plane method to prove this kind of fractional parabolic system, thanks to the radial symmetric and monotonic solutions.
2. Main Results
For this kind of parabolic Laplacian system which is interrelated, our goal was to prove the following significant theorems:
Theorem 1. Let be a unit ball. Let and suppose that are positive bounded classical solutions ofand assume that satisfy the following assumptions: (M1) is non-decreasing in , and is non-decreasing in .
(M2) f and g are characterized by uniform Lipschitz continuity with regard to the variables u and v, i.e.:Then, the functions and exhibit radial symmetry with respect to the origin and demonstrate a monotone decreasing behavior as they move away from the origin. Remark 1. The notation and signify that converges almost everywhere to and converges almost everywhere to for . In our specific context, within a measure space where , there exist sequences of functions and along with functions u and v, such that for any , there exists a set with . For all , we have and . This implies that and converge to u and v at all points except those in a set of measure zero. The rationale behind imposing this condition will be elaborated upon in Section 3. Theorem 1, which was cited in [
19], has been enhanced compared to its counterpart in [
19]. The enhancement involved the addition of convergent conditions on the variables
u and
v, making the theorem more comprehensive.
To streamline the notation, we shall henceforth represent
as
U,
as
V,
as
, and
as
to prove the subsequent Theorem; Theorem 2 is cited in [
19].
Theorem 2. (Narrow region principle on a parabolic cylinder). Let be a bounded region in , such that for λ sufficiently close to , is a bounded narrow region. For , assume that , , and , are lower semi-continuous on . If , are bounded from below in and are Lipschitz continuous, andwe haveand When comparing the proof of the Maximum principle in [
7] with the proof of the narrow region principle in this paper, there are similarities in their approaches. In [
20], Wu proved that the Maximum principle can apply to domains such as Stripes, Annulus, and Archimedean spirals, among others. Consequently, we can adapt this approach to extend the narrow region principle to annular or more general radial domains.
In
Section 3, we introduce the basic method of moving planes. Within
Section 4, we prove the regularity of parabolic fractional equations and parabolic fractional systems; furthermore, we show that if
f is merely Hölder continuous, how it would fit in the maximal regularity. In
Section 5, we provide proofs for Theorem 2. Subsequently, in
Section 6, we offer proofs for Theorem 1, which enables us to establish the radial symmetry and monotonicity of solutions for fractional parabolic systems. We firmly believe that the concepts and methodologies introduced herein can be readily applied to explore a wide range of nonlocal problems encompassing more complex operators and nonlinearities.
3. Basic Set-Up
In the endeavor to prove Theorem 1, we will construct a well-organized framework to execute the moving planes method for nonlocal problems.
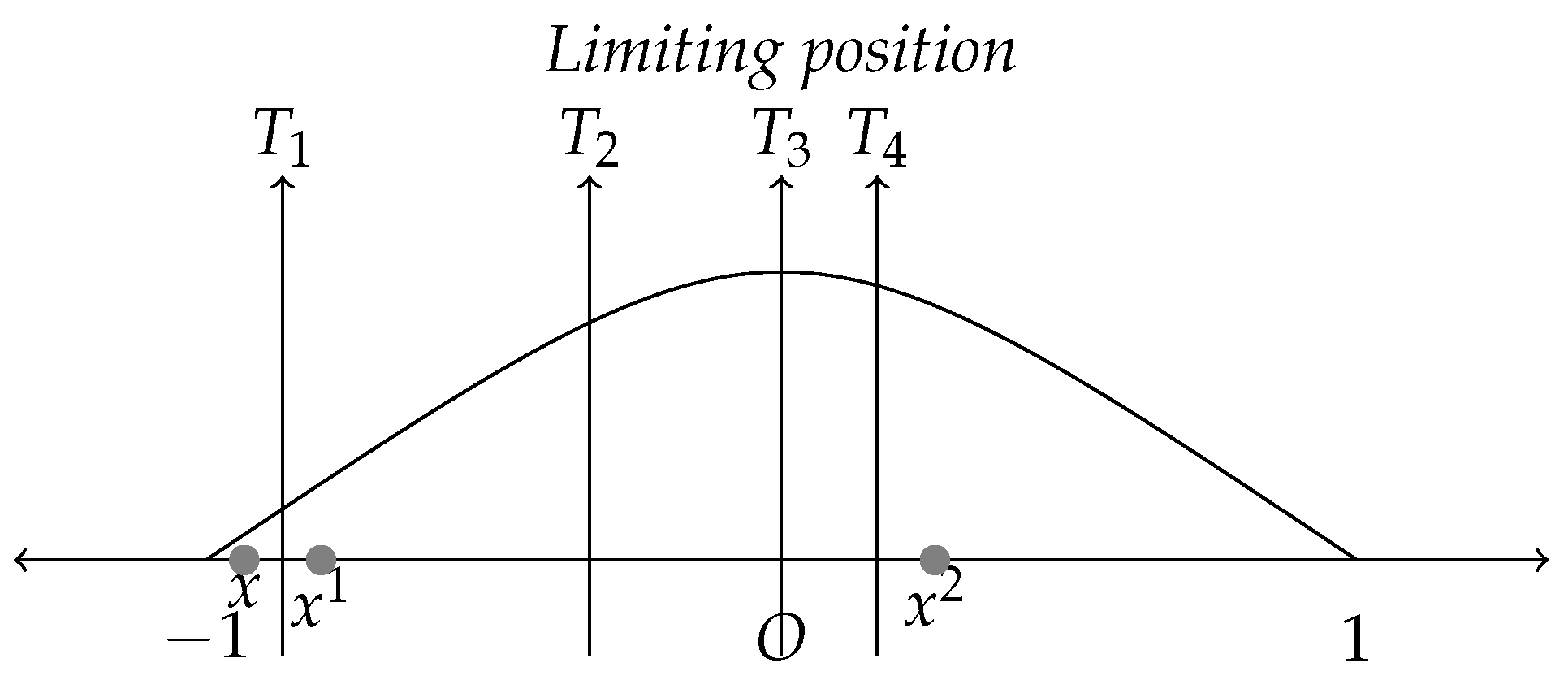
We first consider one simple example on a bounded domain in one-dimensional Euclidean space
. Assume that
u is a positive solution of an equation defined in a symmetric domain
and it equals 0 on the boundary. In addition, the equation is symmetric with respect to
; one can refer to
Figure 1 for a visual representation.
Let
and
. In one dimension, the moving plane reduces to a point:
Let
be the region to the left of
in
, and
be the reflection of
x about
.
We compare
and
. For simplicity, set
. We may expect that when
is sufficiently close to
, we have
Then, we move the plane
T continuously to the right as long as inequality (
6) holds until its limiting position and prove that
u must be symmetric about the limiting plane. From the
Figure 1, when the plane
T is moved to the
position, inequality (
6) is still valid; hence, we can keep moving it. The
position is the limiting one, because after passing it, say at the
position, (
6) is violated.
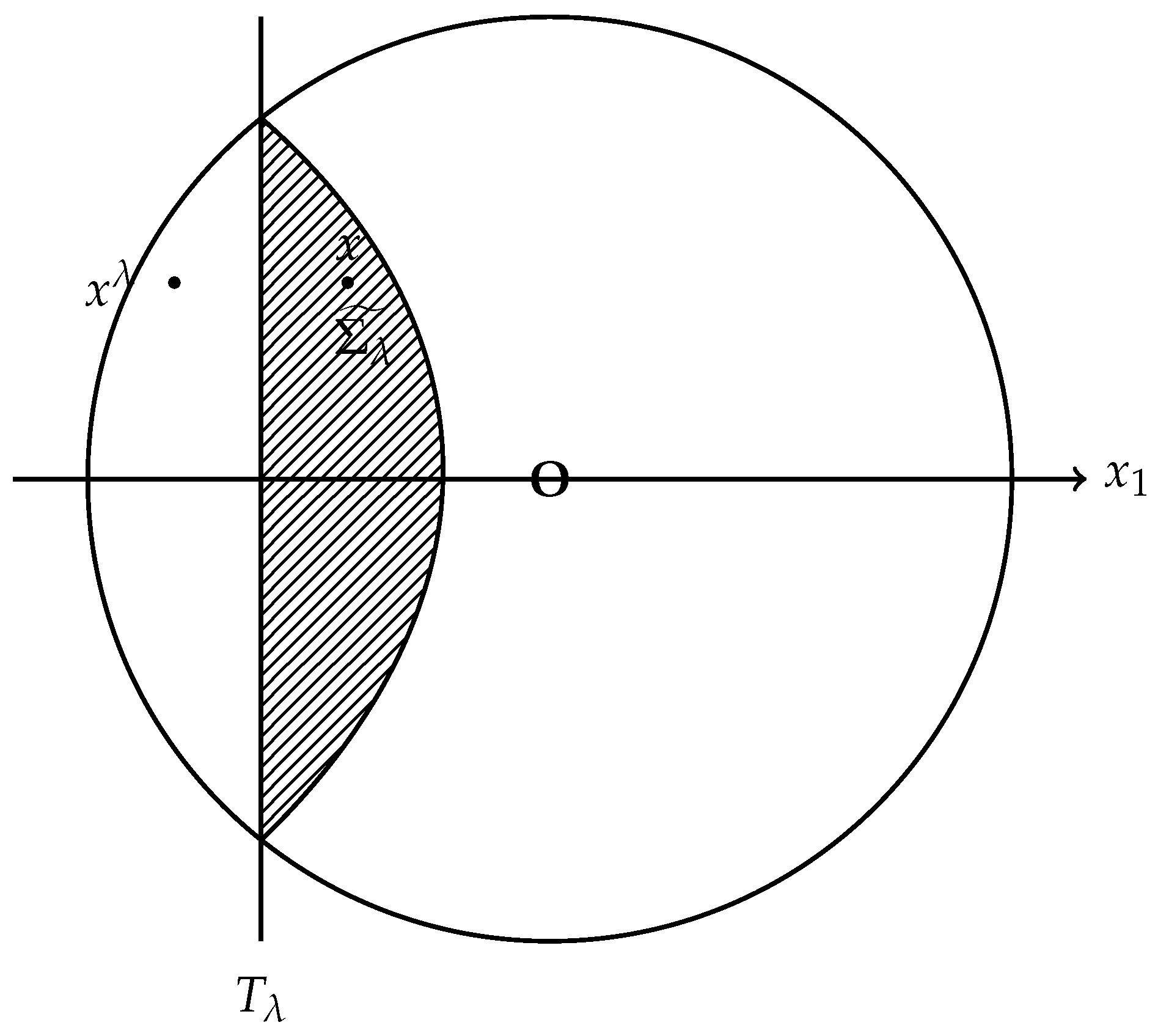
We can generalize this method to higher-dimensional symmetric domain, say
. Given an arbitrary real number
let
be the defined moving planes, and
be the domain situated to the left of the plane, and
be the result of reflecting
x over the plane
is the reflection of
about the plane
; see
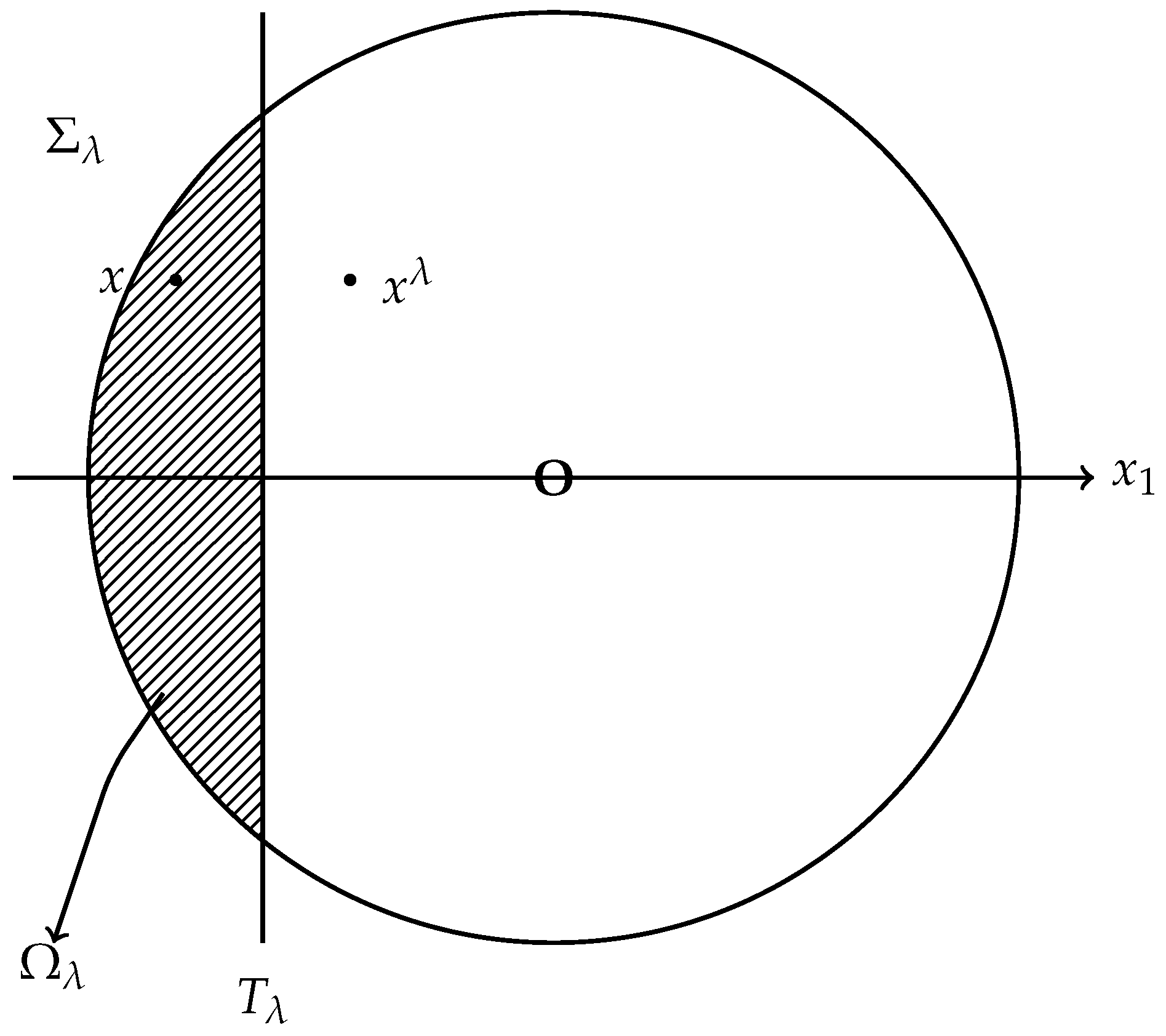
Figure 2. Since in our research
outside
, therefore,
only reflects the intersection part of
and
, and
be the intersection of
and
. One can refer to
Figure 3 for a visual representation.
Let
and
be positive solutions to Equation (
2). We conduct a comparison between the values of
and those of
, where
is defined as
. Similarly, we perform a comparison of the values of
with those of
, with
being equal to
; let
The core aspect of the proof lies in demonstrating that
This establishes an initial condition for initiating the movement of the plane. Subsequently, in the second phase, we displace the plane towards the right, continuing this process as long as inequality (
7) remains valid, until it reaches its limiting position. This is performed to demonstrate that the functions
u and
v exhibit symmetry with respect to the limiting plane. Typically, the narrow region principle is employed to establish the validity of inequality (
7), given that
and
are characterized as anti-symmetric functions:
In high-dimensional spaces, if we only aim to prove properties of solutions in specific directions, any symmetric domain can be used, as long as the equation is symmetric with respect to this domain. For example, this applies to the semi-major axis, semi-intermediate axis, and semi-minor axis of an ellipsoid. However, if we need to prove the radial symmetry of solutions in any arbitrary direction
, then a unit ball must be used.
4. Regularity and Maximal Regularity of Solutions of Fractional Parabolic Systems
We rely on the following theorem of Liu (2025) [
7] to establish the existence of solutions of parabolic fractional equations.
Theorem 3 (Liu, 2025, p. 3 [
7]).
Let be a unit ball. Let , assuming that is a positive bounded classical solution ofwhere f is Lipschitz continuous; then, the solution of (8) satisfies the - maximal regularity estimate:for any . Since , and is dense in . In (
9),
consists of functions
, such that the following norm is finite:
which does not assume time-weighted norms as shown in [
21]. The exponential stability result is derived from the analyticity of the semigroup, not from explicit weighting.
We can generalize Theorem 3 if
is only Hölder continuous. A function
is Hölder continuous if there exist constants
and
, such that for all
A larger
implies stronger continuity for
f.
is a Sobolev space where
s can be a non-integer. For
, the Sobolev embedding theorem states that
can be continuously embedded into Hölder continuous function spaces.
Theorem 4 (Sobolev embedding theorem). If , then embeds continuously into , where k is the largest integer satisfying , . denotes the space of functions that are k-times continuously differentiable, with k-th derivatives being α-Hölder continuous. If s is not an integer and , then embeds into , where .
The solution
u in the maximal regularity (
9) often belongs to a space like
which is a Sobolev-type space with mixed derivatives. For
f to be in
, we do not necessarily need Hölder continuity in time, but we consider
f to be Hölder continuous in space. Specifically, if
, then
f can be embedded into
for
, where
n is the spatial dimension, provided that
for the embedding into Hölder spaces is held. Our goal is to show that
f being Hölder continuous implies that
u is in
, and then use embedding to control
u in
. To prove that
u belongs to
when
f is Hölder continuous, we would typically use the fact that the heat equation with Hölder continuous
f has a solution
u that is smooth in time and space by parabolic regularity theory (see this part in [
22]). Then,
u satisfies the maximal regularity estimate in terms of
-type norms.
Then, we use the Hölder continuity of f to bound the -norm of u in terms of the Hölder norm of f. Here is a sketch of how to bound :
First, we multiply
by
u and integrate over
:
then,
This gives a basic energy estimate for
.
For higher-order derivatives, we differentiate the PDE with respect to
x to get estimates on
,
, …, and use energy estimates for
to bound
, and similarly for higher derivatives. Then, we use interpolation inequalities to relate
to lower-order norms; for example, if
s is an integer, then
We bound each term using the energy estimates and the Hölder continuity of
f. For non-integer
s, we use fractional Sobolev norms and interpolation (e.g., the Gagliardo–Nirenberg inequality).
Combining these steps, we can derive a bound of the form:
where
C depends on
, and the domain
. The exact value of
s depends on the regularity of
f and the parabolic operator. For
, we can typically bound
u in
for
s up to
.
When considering the case where
are different and
, the original assumptions
and
on
f and
g (non-decreasing property and uniform Lipschitz continuity) are still fundamental for guaranteeing the symmetry of the solutions
u and
v with respect to the origin. The fractional Laplacian
has the following Fourier transform representation:
where
F is the Fourier transform. As
,
for all
. So, the equation
approaches
as
. Then, we have the following system:
with certain initial conditions and homogeneous boundary conditions. Now, we would like to show the regularity of the system (
10).
4.1. Weak Formulation
Let
. Multiply the first equation
by
and integrate over
for
:
using integration by parts with respect to
s, we derive
For a test function
, we multiply the second equation
by
and integrate over
, using the fact that
outside
:
By integration by parts with respect to
s and using the properties of the fractional Laplacian:
for appropriate functions
v and
(see the proof of this equation in [
23]), we have
4.2. Energy Estimates
Multiply the first equation
by
u and integrate over
:
we derive
Through the Cauchy–Schwarz inequality and Young’s inequality, since
because
f is Lipschitz continuous, we have
Let
, then
Multiply the second equation
by
v and integrate over
:
through the non-negativity of the fractional Dirichlet form and Lipschitz continuity of
g, we derive
Let
and
; summing the two inequalities, we have
Let
. Then
by Gronwall’s inequality, if
, then
. This shows that
and
.
4.3. Higher-Order Regularity
Differentiate the first equation with respect to
t:
multiply this equation by
and integrate over
. Using the Cauchy–Schwarz inequality, the fact that
and the Lipschitz continuity of
, we have
. Since
and
, and also
, we can use elliptic-type estimates (in the time-dependent sense) to show
. Differentiate the second equation with respect to
t:
multiply this equation by
and integrate over
. Using the properties of the fractional Laplacian, the Cauchy–Schwarz inequality, and the Lipschitz continuity of
, we can show that
. By using the fact that
and the regularity results for the fractional heat equation, we can show that
. In conclusion, for the initial values
and
, and if
are Lipschitz continuous, then the weak solution
of the parabolic system satisfies
and
Also, the minimal regularity conditions on
should be
and
In the reference [
18], Liu (2024) offered a succinct elucidation of the foundational logic and principles that underpin the existence of maximal regularity for both parabolic and hyperbolic differential equations. By relying on this source, we can conclude that a necessary condition for the existence of maximal regularity in parabolic differential equations is that the eigenvalues of the operator corresponding to the spatial variables must be strictly less than 1. In the expression (
9), we note that as
approaches infinity and
, the norm
can be bounded above by 1. Nevertheless, when
is not large enough or
, in order to guarantee that the eigenvalues of the nonlocal fractional Laplacian operator stay below 1, we enforce the requirement
as shown in Theorem 1. Convergence condition is used to regulate the growth of
and
.
5. Narrow Region Principle in Systems of Parabolic Laplacian Equations
We present a detailed proof for Theorem 2. Subsequently, in the following sections, we leverage Theorem 2 to contribute a comprehensive proof for Theorem 1.
In the event that Equation
fails to be valid, then the lower semi-continuity of
on
guarantees that there is at least one
, such that
Given that
serves as the minimum point, it follows that
Moreover, by further analyzing condition (
3), it can be inferred that the point
lies within the interior of
. Subsequently, we proceed as follows
where
d denotes the distance function. If
If
Combining (
3), (
12), (
13) and (
14), we deduce
Therefore, we have
This indicates that there is at least one pair
belonging to
, satisfying
The point
is defined as the minimum point of the function
V over the domain
. This means that for all
, we have
. In the context of calculus of variations or optimization, a necessary condition for a function to attain a local minimum at a point is that the first-order partial derivatives of the function with respect to its variables vanish at that point. This is a fundamental result from the theory of critical points and can be derived from the Taylor series expansion of the function around the minimum point. Applying this necessary condition to our function
V, we conclude that the partial derivatives of
V with respect to
x and
t must be zero at
, so that
for convenience, we denote
following the same argument with (
12), we are able to infer that
From (
15), we derive
Combine (
3) and (
16), we have
we derive
Provided that
is in a sufficiently small neighborhood of
,
d would be remarkably small,
and
so we derive
The aforementioned contradiction serves as evidence that Equations (
4) and (
5) necessarily hold. Up to this point, we have successfully demonstrated the validity of Theorem 2.
6. Key Steps in Proving Theorem 1
Step 1:
Initiate the motion of the plane, starting from a position close to the left endpoint of and proceeding along the axis, ensuring that the origin is not attained during this movement,
so that
We infer the following from Equation (
2) and
,
; by Mean value theorem,
and
satisfies
where
p is the exponent in the homogeneity assumption. As indicated by the conditions in Theorem 1,
are non-decreasing,
are positive.
and
are positive and bounded, since
lies between
and
,
is also bounded,
lies between
and
,
is also bounded. Therefore,
,
are bounded below by some positive constant. Combining these,
are bounded below. Since
are Lipschitz continuous, they grow at most linearly,
are bounded above; therefore,
are bounded above. Given these considerations,
are bounded and positive.
We initially demonstrate that when
is sufficiently near to
, the following holds:
Let
,
be
U and
V in Theorem 2; we deduce
Since
are bounded and positive, based on Theorem 2, we arrive at the conclusion that when
is narrow and
is sufficiently near to
,
Let
from (
18) and (
19), we derive the following:
where we take
and
,
and
are still bounded and positive. For convenience, we denote
by
, and
by
in the following.
Now, we begin to prove (
20). Suppose otherwise, if the inequality
fails to hold, then
must be negative at some point. Consequently, there exists
and
, satisfying
If
,
. If
,
. By combining with Equation (
23), we deduce
from (
12), we also have
in the case where
width
, we subsequently deduce
and
therefore, we must have
This entails the existence of a point
, satisfying
so as to
Following the same argument with (
12), we can derive that
we derive
If
is sufficiently near to
,
d is expected to be remarkably small,
combining (
25)–(
27), we derive
since this amounts to a contradiction, we can conclude that
so as to
Suppose
is the minimum point such that
from (
28), we have
we take the partial derivative to the right side of (
29) with respect to
t and derive
since
Let
,
resulting in (
30) approaches to 0 with
, so that
is also a minimum point with
; combining this with (
28), we have
is bounded from below. Substitute (
32) back to (
21); it is easy to deduce
Consequently, provided that
is narrow, the validity of equation (
20) is established.
Step 2:
The inequality (20) serves as an initial basis. Starting from this basis, we can proceed with the transition of the plane. We will continuously shift the plane to the right until it reaches its limiting position, provided that inequality (20) remains valid. Define
we shall establish the result that
.
Alternatively, in the case where
, we shall demonstrate that
is capable of being translated further to the right, and consequently, we will obtain
Assume that
; we first aim to prove
Assume, for the sake of contradiction, that the inequality
does not hold. In this case, there must exist a point
satisfying
. Given that, as demonstrated in step 1,
within the region
, the point
constitutes a minimum point. Consequently, the partial derivative
equals zero; following the same computation with (
12), we derive
on the other hand, following from (
18), we have
this implies
we arrive at a contradiction because the plane
fails to reach the origin. Once
is on the curved part
, then its reflection point
is in the interior of the ball—see
Figure 4—hence,
, which contradicts (
35). Therefore,
in (
33) is proved. The proof for
in (
33) follows the same procedure.
However, since for all
,
,
, we proceed to establish
and
, which are bounded away from zero:
Assume that the condition is not satisfied. In this case, there exists a sequence belonging to for which converges to 0 as k tends to infinity. By applying the Bolzano–Weierstrass theorem, without any loss of generality, we can extract a subsequence of the sequence (for the sake of simplicity, we continue to use the notation for this subsequence) such that the subsequence converges to a point .
Assume that
and this sequence converges to 0 for a certain sequence
in
. Given that the sequence
possesses a certain compactness characteristic, this compactness is a consequence of the Arzelà–Ascoli theorem. In particular, if the sequence
is bounded within an appropriate fractional Sobolev space, then it converges locally uniformly in the Hölder space
for any
. Consequently, the sequence
converges locally uniformly to
, and we can conclude that
. Consequently,
we also have
(
37) and (
38) forces
by a Strong Maximum Principle proved in the Lemma 4 in [
7], it is necessary to conclude that
,
. Thus,
converges to 0 uniformly in
. The proof for
in (
36) follows the same procedure.
According to the regularity theory pertaining to parabolic equations as presented in reference [
24], we are able to ensure the existence of an equation with the following form
which could converge to the form
With the aim of obtaining a contradiction when
k is sufficiently large, let
which converges to 0 uniformly.
Let
here,
represents a cut-off function with the property that the absolute value of its derivative;
is bounded above by a constant
c, i.e.,
The function
reaches its minimum value at a certain point, denoted as
within the domain
. This fact entails that
Combining (
43) and (
44), it also implies
and
Combining (
42) and (
43), it is easy to deduce
thus
Since we have
where
, this situation constitutes a contradiction. Consequently, the assertion (
36) has been proven.
Given that
and
are continuously dependent on
, it follows that there exist positive real numbers
and
with
, such that for every
belonging to the open interval
, the following holds:
We now proceed to apply the narrow region principle (Theorem 2). In the context of our problem, the relevant narrow region is defined as follows:
by narrow region principle (Theorem 2), we derive
By integrating the results of (
46) and (
47), we can draw the conclusion that for every
within the open interval
, the following holds:
this result is in direct contradiction to the established definition of
. Consequently, it is necessary that
and
Analogously, it is feasible to move the plane
in the left-ward direction starting from
and subsequently demonstrate that
Combining (
48) and (
49), we have shown that
and
With this, the procedure for step 2 is concluded.
Up to this point, we have established the symmetry of u and v with respect to the plane . Given that the orientation of the -axis can be selected in an arbitrary manner, we have, in essence, demonstrated the radial symmetry of u and v about the origin.
Given that
for all
, and for every
, assume there exists a point
which serves as the minimum point. Based on the preceding analysis, on the one hand,
on the other hand,
this forces
this leads to a contradiction. We conclude that
u is monotonically decreasing in origin. This is the same routine for
v. Until now, we have only proved Theorem 1.



{kind=link}
{kind=link}
{kind=link}
{kind=link}