
Self-Coupling PID Control with Adaptive Transition Function for Enhanced Electronic Throttle Position Tracking


Abstract
1. Introduction
2. Electronic Throttle Model
3. Design of Electronic Throttle Controller
4. Analysis of Stability and Disturbance Rejection of System
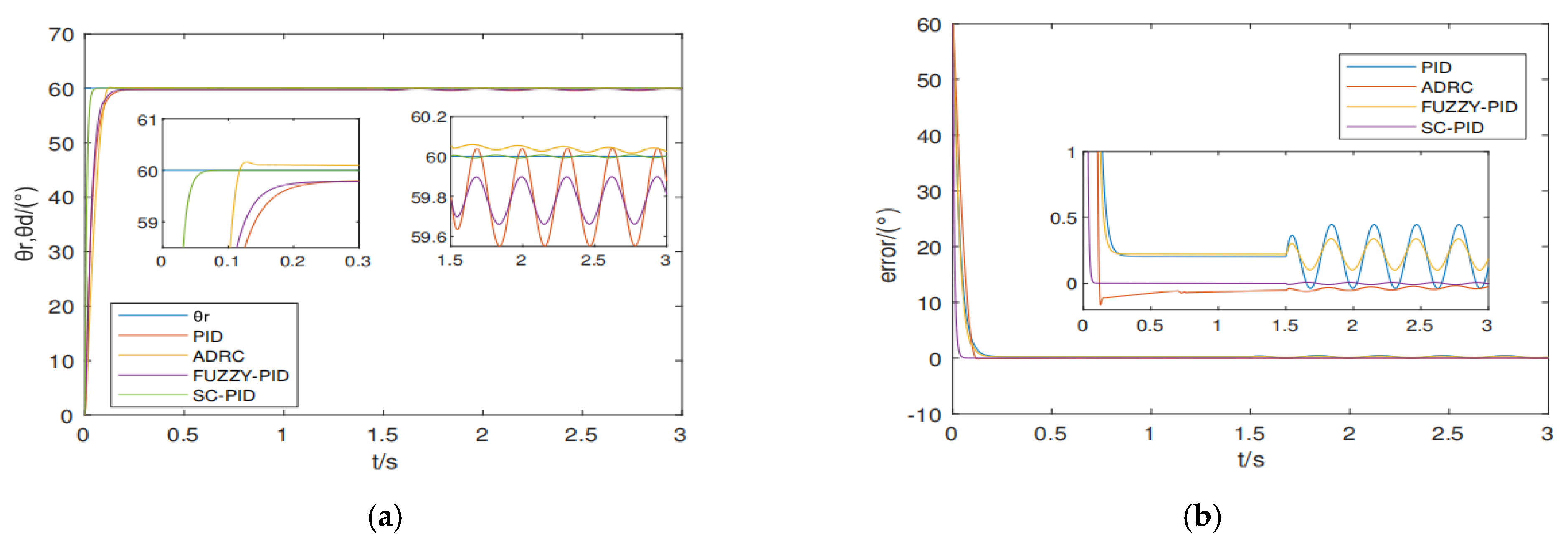
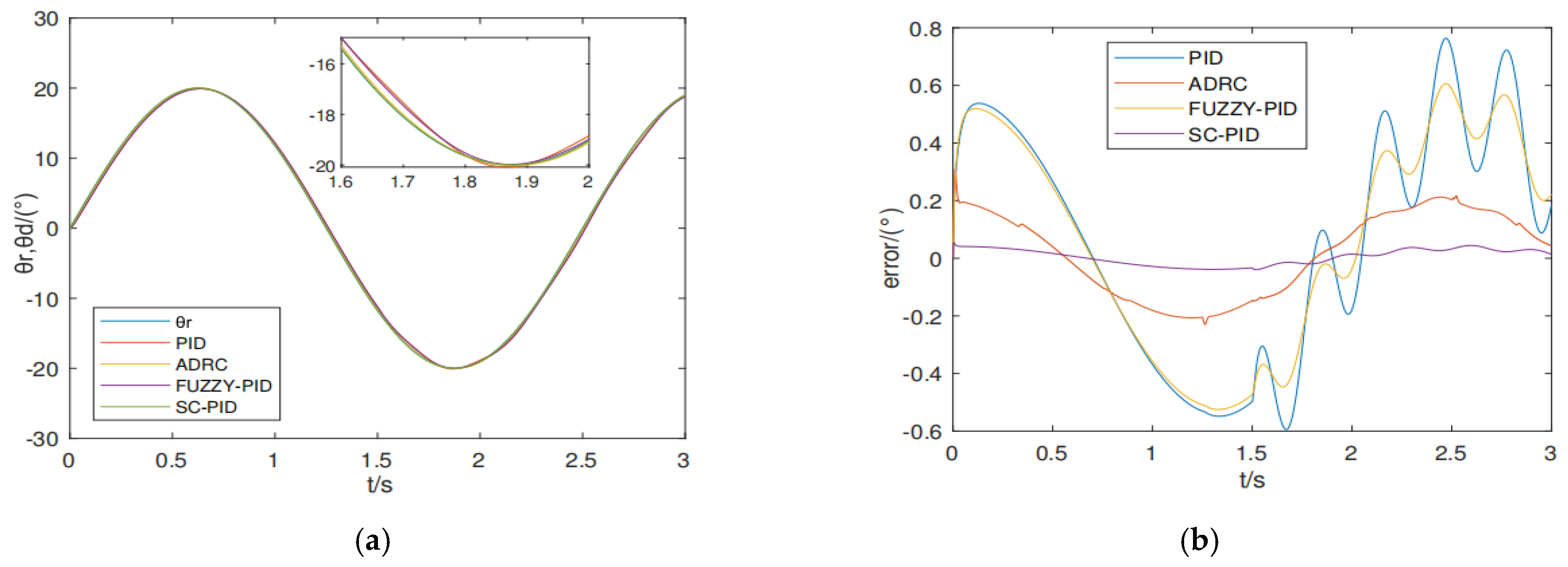
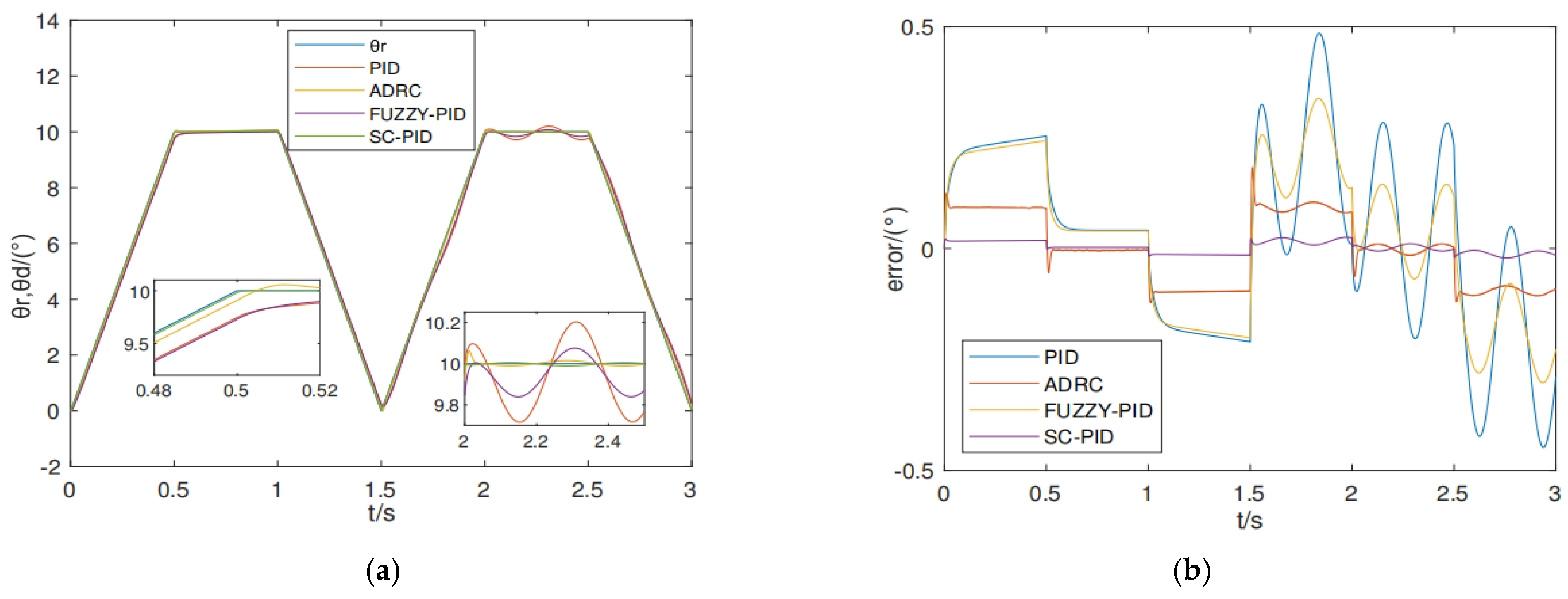
5. Comparative Simulation Experiments of Conventional PID, Active Disturbance Rejection, Fuzzy PID, and the Proposed Control Strategy
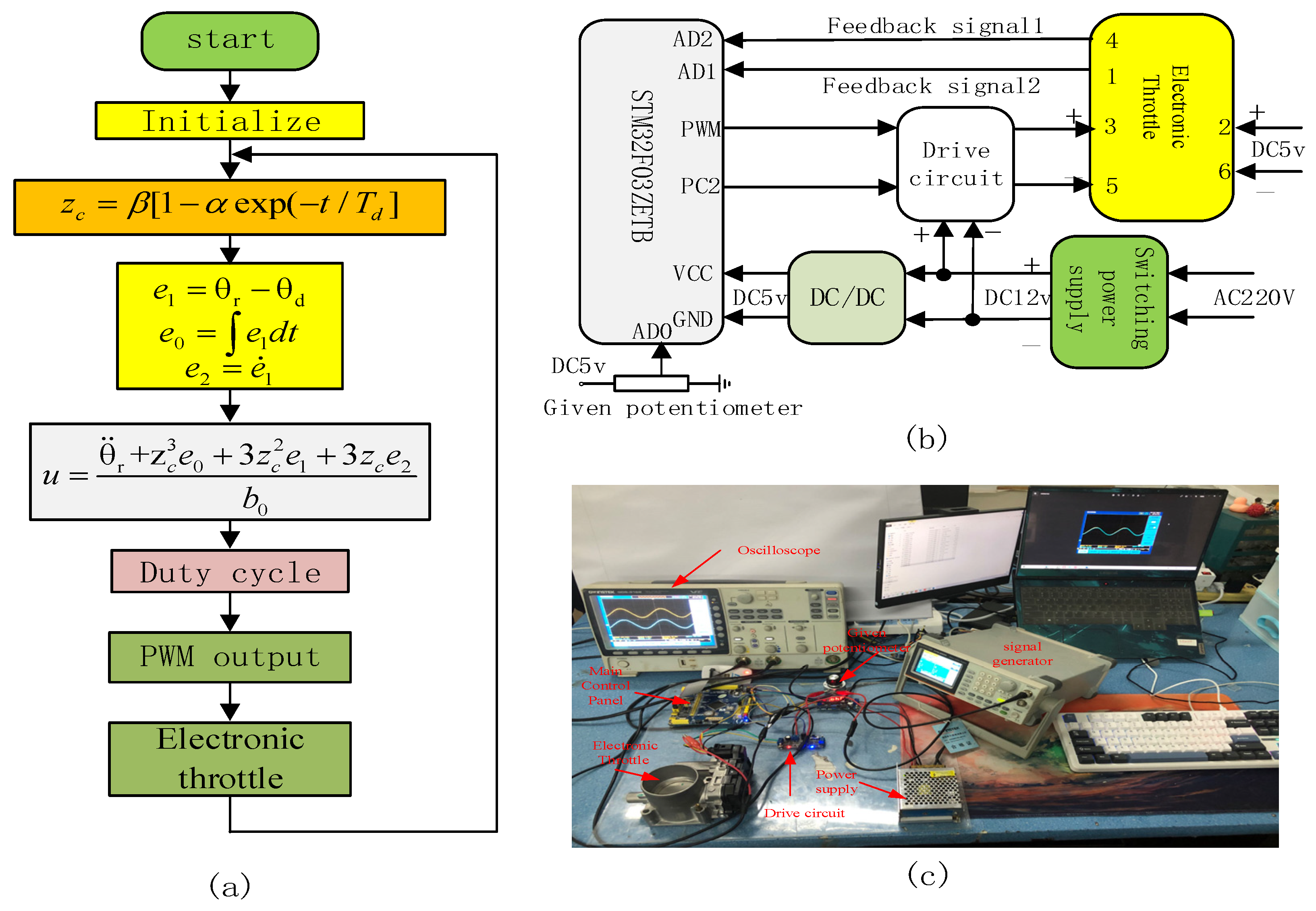
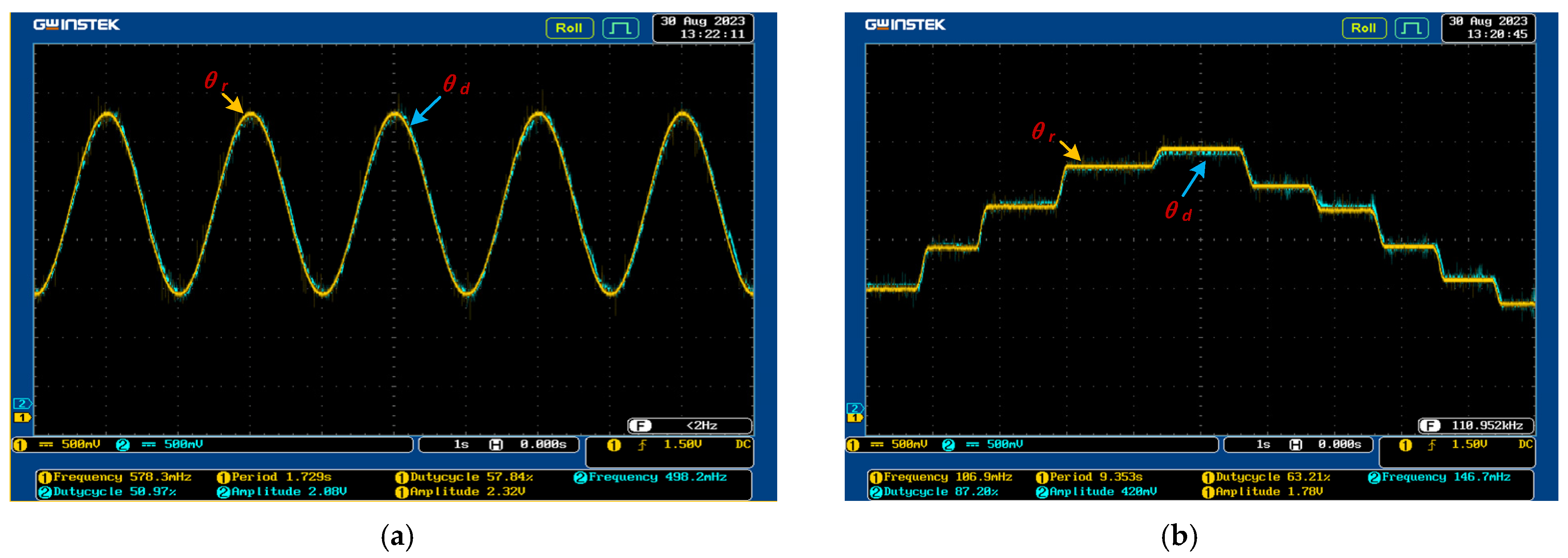
6. Prototype Experiment
7. Conclusions
- (1)
- The self-coupling PID control law enables the throttle valve opening to track the target signal quickly, accurately, and without overshoot. It also exhibits good robustness.
- (2)
- The adoption of the adaptive transition function effectively addresses the trade-off between speed and overshoot. The self-coupling PID control method is easier to tune compared to conventional PID, fuzzy PID, and ADRC.
- (3)
- By transforming the closed-loop control system of a nonlinear uncertain system into an error dynamic system under comprehensive disturbance excitation, and analyzing the system performance using pulse excitation response, a new approach is proposed for nonlinear control, which is easy to understand and provides a new avenue for nonlinear control exploration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chang, Y. Model-based analysis and tuning of electronic throttle controller. In 2004 Society of Automotive Engineers World Congress; SAE International: Detroit, MI, USA, 2004. [Google Scholar]
- Chen, H.; Hu, Y.F.; Guo, H.Z. Electronic throttle control based on Backstepping method. Control Theory Appl. 2011, 28, 491–496. [Google Scholar]
- Hashimoto, E.; Tetsuya, I.; Yasut, Y. High reliability electronic throttle system design. In 2003 Society of Automotive Engineers World Congress; SAE International: Detroit, MI, USA, 2003. [Google Scholar]
- Sun, Z.T.; Jiao, X.H.; Xue, J.Q. Prescribed performance control Based on PSO identification and disturbance observer for automotive electronic throttle system with actuator constraint. J. Control Eng. Appl. Inform. 2020, 22, 24–31. [Google Scholar]
- Yuan, X.F.; Wang, Y.N. A novel electronic throttle valve controller based on approximate model method. IEEE Trans. Ind. Electron. 2009, 56, 883–890. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z.; Jin, X.; Huang, Y.; Kong, H.; Yu, M.; Ping, Z.; Sun, Z. Adaptive integral terminal sliding mode control for automobile electronic throttle via an uncertainty observer and experimental validation. IEEE Trans. Veh. Technol. 2018, 67, 8129–8143. [Google Scholar] [CrossRef]
- Wang, D.; Liu, S.; He, Y.; Shen, J. Barrier Lapunov Function based adaptive back-stepping control for electronic throttle control system. Mathematics 2021, 9, 326. [Google Scholar] [CrossRef]
- Jia, D.M.; Zhang, H. Electronic Throttle Control Based on Model-following Variable Structure Algorithm. Electr. Drive 2021, 51, 58–64. [Google Scholar]
- Zhang, B.J.; Chen, Z.; Tian, Y.; Zhang, N.; Wang, M. Optimal Preview position control for automotive electronic throttle. Nongye Jixie Xuebao 2017, 48, 349–354. [Google Scholar]
- Chen, F.X.; Liu, L.; Zhang, T. Control of electronic throttle based on active disturbance rejection control of technique. China Sci. Pap. 2014, 9, 1188–1191. [Google Scholar]
- He, Y.; Liu, X.; Wang, D.; Yuan, C.; Shen, J. Adaptive constrained control for automotive electronic throttle control system with experimental analysis. at-Automatisierungstechnik 2022, 70, 192–204. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H. Robust tracking control for vehicle electronic throttle using adaptive dynamic sliding mode and extended state observer. Mech. Syst. Signal Process. 2020, 135, 106375. [Google Scholar] [CrossRef]
- Kumar, A.; Kukker, A. Reinforcement learning-based intelligent energy management system for electric vehicle. In Intelligent Control for Modern Transportation Systems; CRC Press: Boca Raton, FL, USA, 2023; pp. 153–166. [Google Scholar]
- Kukker, A.; Sharma, R. Genetic Algorithm-Optimized Fuzzy Lyapunov Reinforcement Learning for Nonlinear Systems. Arab. J. Sci. Eng. 2020, 45, 1629–1638. [Google Scholar] [CrossRef]
- Kukker, A.; Sharma, R. Stochastic Genetic Algorithm-Assisted Fuzzy Q-Learning for Robotic Manipulators. Arab. J. Sci. Eng. 2021, 46, 9527–9539. [Google Scholar] [CrossRef]
- Zeng, Z.Z.; Liu, W.J. Self-coupling PID Controllers. Actor Antomatica Sin. 2021, 47, 404–422. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit | Parameters | Value | Unit |
|---|---|---|---|---|---|
| 0.016 | 4 × 10−4 | ||||
| 1.6 × 10−6 | 0.0247 | ||||
| 0.0048 | 2.8 | ||||
| 0.0349 | 1.15 × 10−3 | ||||
| 16.95 | 0.016 |
| Property Index | PID | FUZZY-PID | ADRC | SC-PID |
|---|---|---|---|---|
| Adjusting time (s) | 0.2 | 0.2 | 0.12 | 0.06 |
| Maximum error under disturbance (°) | 0.45 | 0.34 | 0.054 | 0.009 |
| Property Index | PID | FUZZY-PID | ADRC | SC-PID |
|---|---|---|---|---|
| Tracking error without disturbance (°) | 0.5 | 0.5 | 0.2 | 0.03 |
| Maximum error under disturbance (°) | 0.7 | 0.6 | 0.2 | 0.044 |
| Property Index | PID | FUZZY-PID | ADRC | SC-PID |
|---|---|---|---|---|
| Tracking error without disturbance (°) | 0.25 | 0.24 | 0.11 | 0.017 |
| Maximum error under disturbance (°) | 0.47 | 0.33 | 0.17 | 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Liu, P.; Cheng, Y. Self-Coupling PID Control with Adaptive Transition Function for Enhanced Electronic Throttle Position Tracking. Symmetry 2025, 17, 673. https://doi.org/10.3390/sym17050673
Liu C, Liu P, Cheng Y. Self-Coupling PID Control with Adaptive Transition Function for Enhanced Electronic Throttle Position Tracking. Symmetry. 2025; 17(5):673. https://doi.org/10.3390/sym17050673
Chicago/Turabian StyleLiu, Cheng, Peilin Liu, and Yanming Cheng. 2025. "Self-Coupling PID Control with Adaptive Transition Function for Enhanced Electronic Throttle Position Tracking" Symmetry 17, no. 5: 673. https://doi.org/10.3390/sym17050673
APA StyleLiu, C., Liu, P., & Cheng, Y. (2025). Self-Coupling PID Control with Adaptive Transition Function for Enhanced Electronic Throttle Position Tracking. Symmetry, 17(5), 673. https://doi.org/10.3390/sym17050673