
A Cooperative MHE-Based Distributed Model Predictive Control for Voltage Regulation of Low-Voltage Distribution Networks


Abstract
1. Introduction
- A distributed control scheme is implemented in the low-voltage distribution network (LVDN) without relying on the system structure and topology information. This approach effectively exploits the symmetries of distributed generators. Given the challenging communication conditions and complex, often ill-defined structures in LVDNs, this utilization of DG symmetries is of great significance. Compared with traditional methods that demand comprehensive system information, the proposed distributed control scheme offers a more practical and adaptable solution for LVDN control;
- The feedback linearization theory is employed to simplify the high-order and nonlinear DG model. Through this approach, the order of the model is reduced, and the input–output relationship is decoupled. This simplification greatly facilitates the design of the secondary controller. In the context of voltage control in LVDNs, the application of feedback linearization provides a more efficient means of handling the complex DG model, enhancing the manageability of the control system design process;
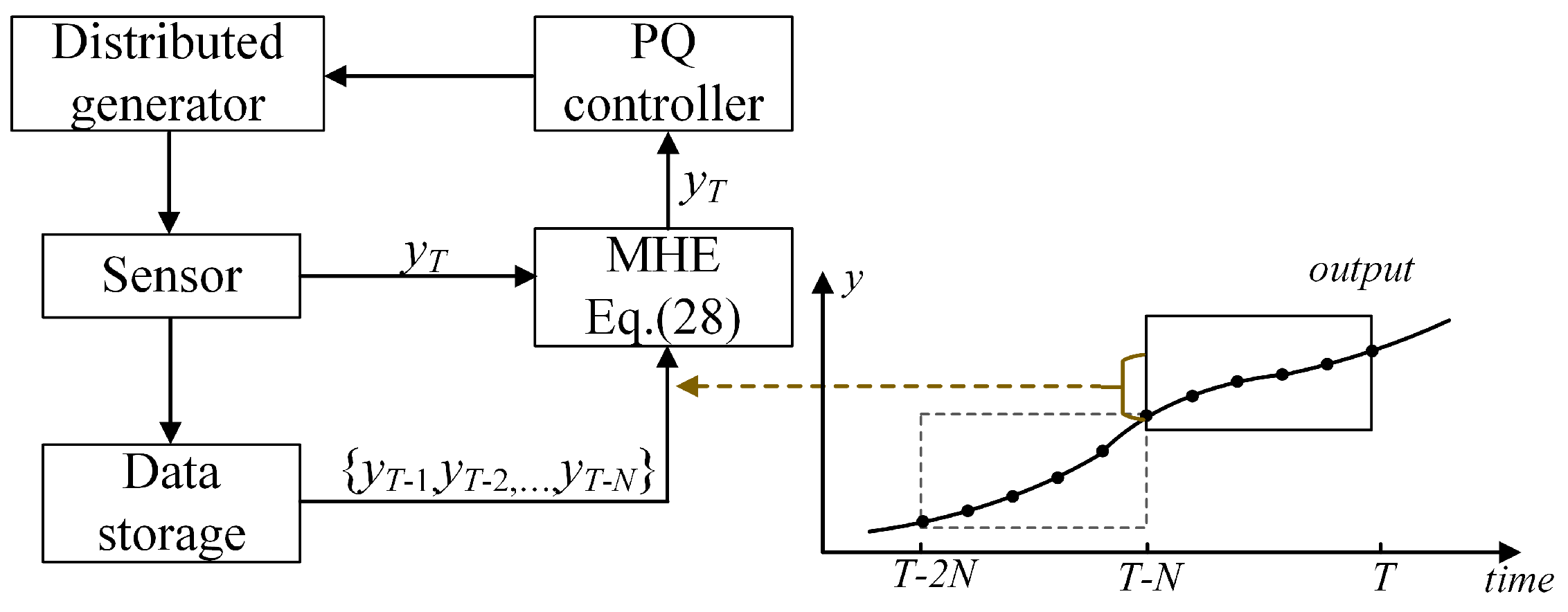
- A moving horizon estimator is proposed to estimate the internal deficient state variables. By estimating these variables, the dynamic response of voltage control is improved, and the measurement limitations in low-voltage distribution networks are compensated. In particular, after the feedback linearization reduces the model order, some state variables may become unmeasurable. MHE effectively addresses this issue. It can handle the nonlinear characteristics of the model, thereby enhancing the accuracy and reliability of state variable estimation. This represents a significant advancement over traditional estimation methods, contributing to more effective voltage control in LVDNs;
- Considering the inevitable time delay in the communication link, a cooperative moving horizon estimator-based distributed model predictive control (MPC) is proposed. This control method enhances the coordination among different DGs and improves the robustness of the low-voltage distribution network. In the secondary control, it adjusts the control signal to account for the time delay, thereby improving the performance of conventional control methods under poor communication conditions. The proposed cooperative MHE-based distributed MPC provides a more reliable and efficient control strategy for LVDNs in the face of communication challenges.
2. Grid-Connected Low-Voltage Distribution Network
2.1. Distributed Structure
2.2. Communication Delay
2.3. Voltage Sensitivity with Respect to Power Injection
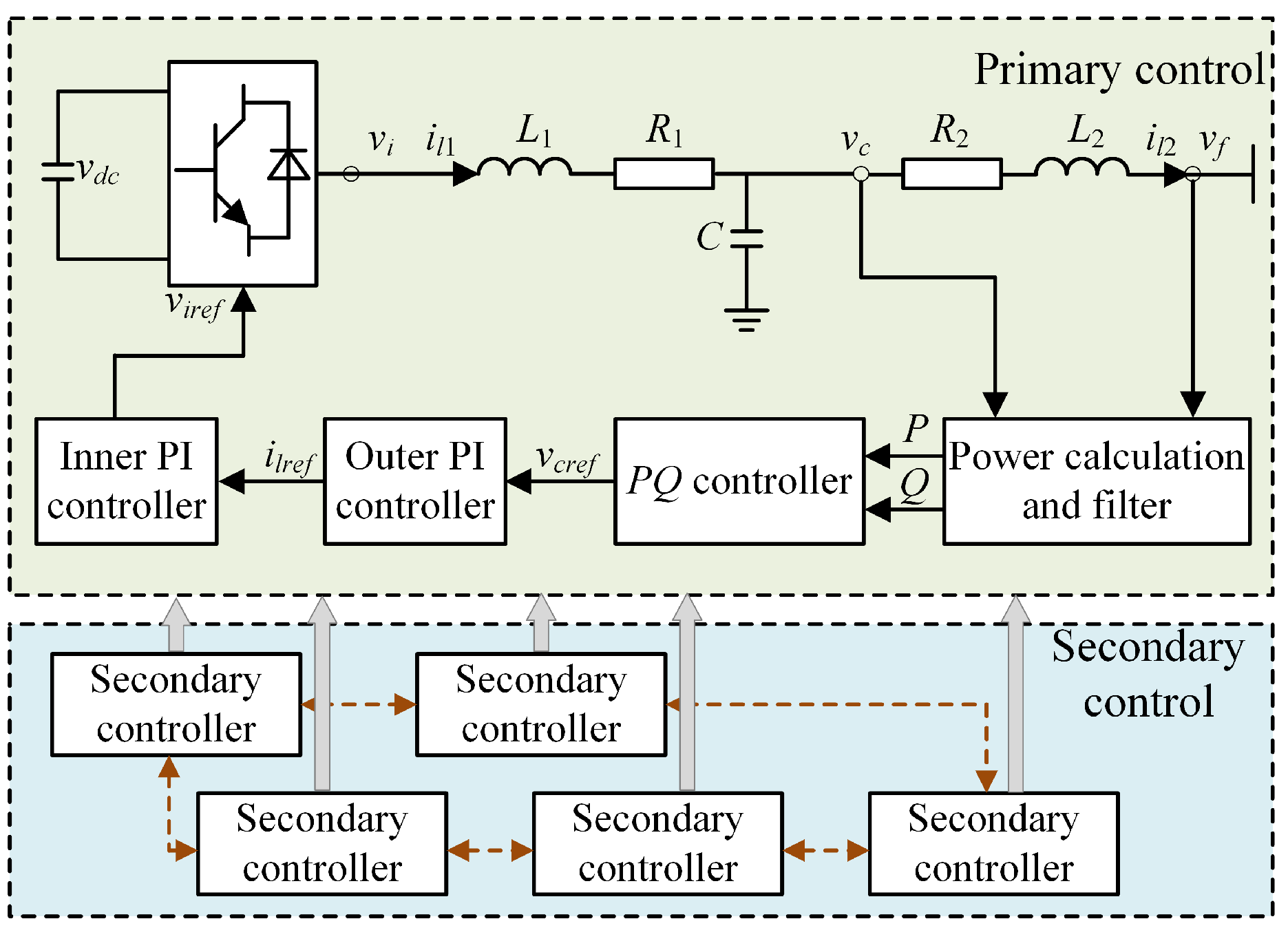
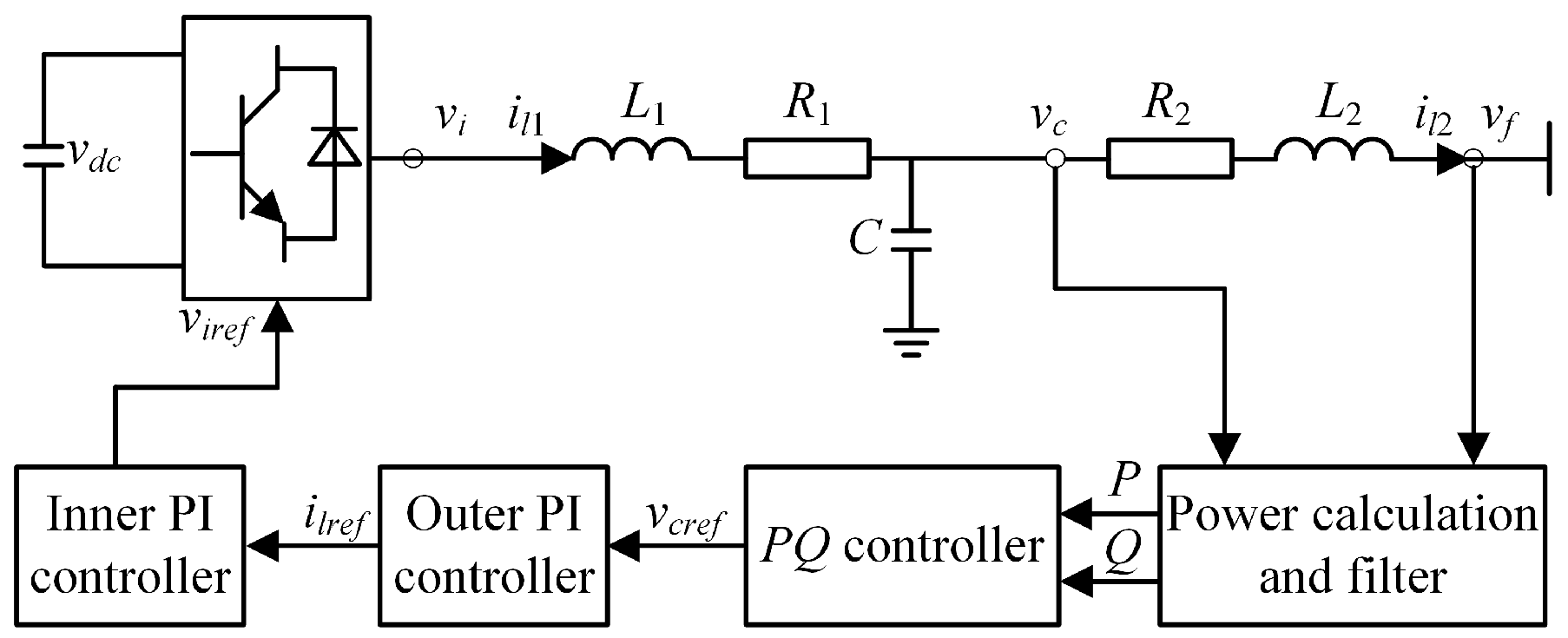
3. Control System of Distributed Generators
3.1. Power and Current Control Systems
3.2. Primary Control with Symmetries
3.3. Secondary Control
4. Prediction-Based Secondary Control for Voltage Regulation
4.1. Feedback Linearization Theory
4.2. Moving Horizon Estimation
4.3. A Cooperative MHE-Based Distributed MPC
5. Case Studies
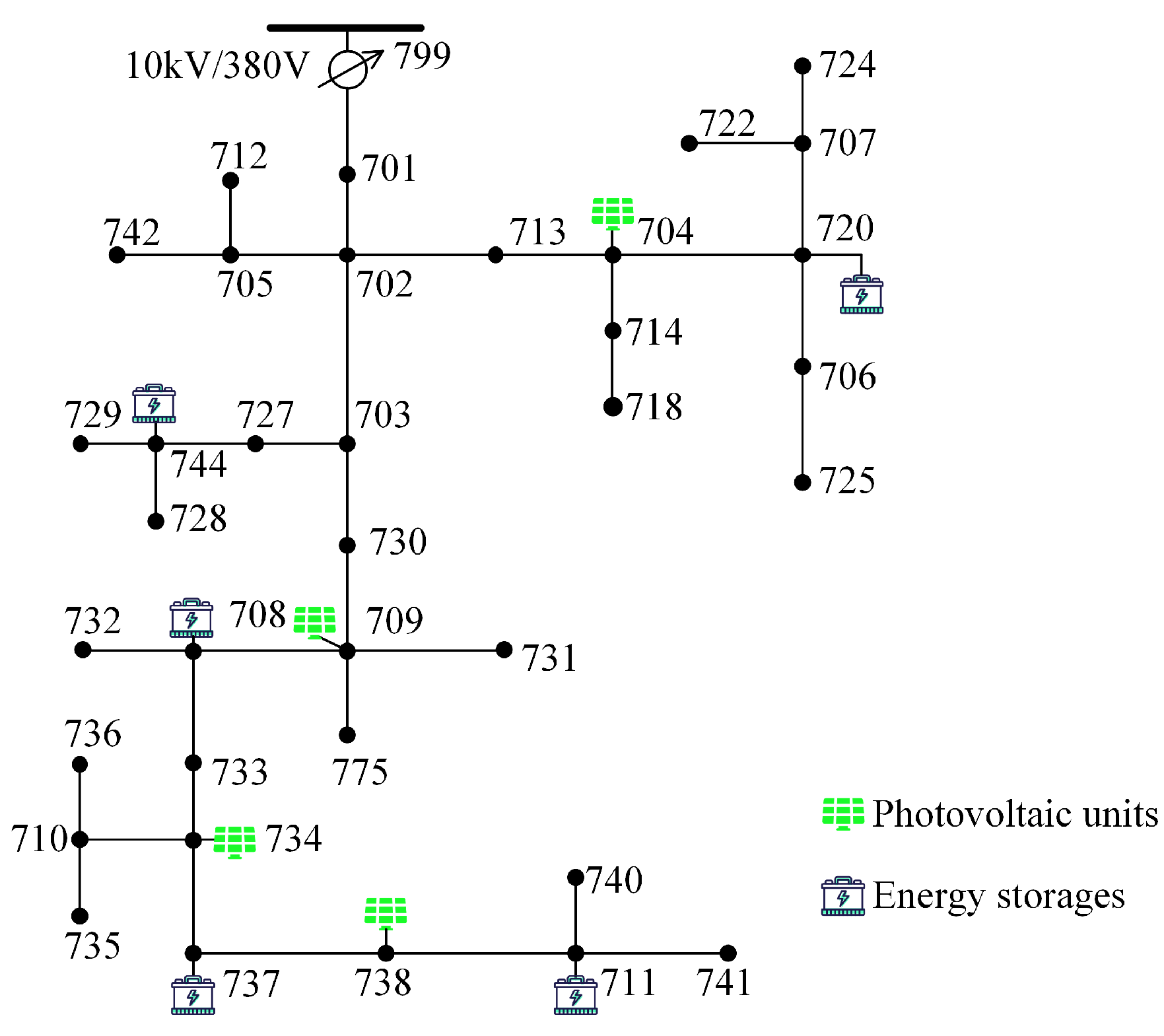
5.1. Simulation Configuration
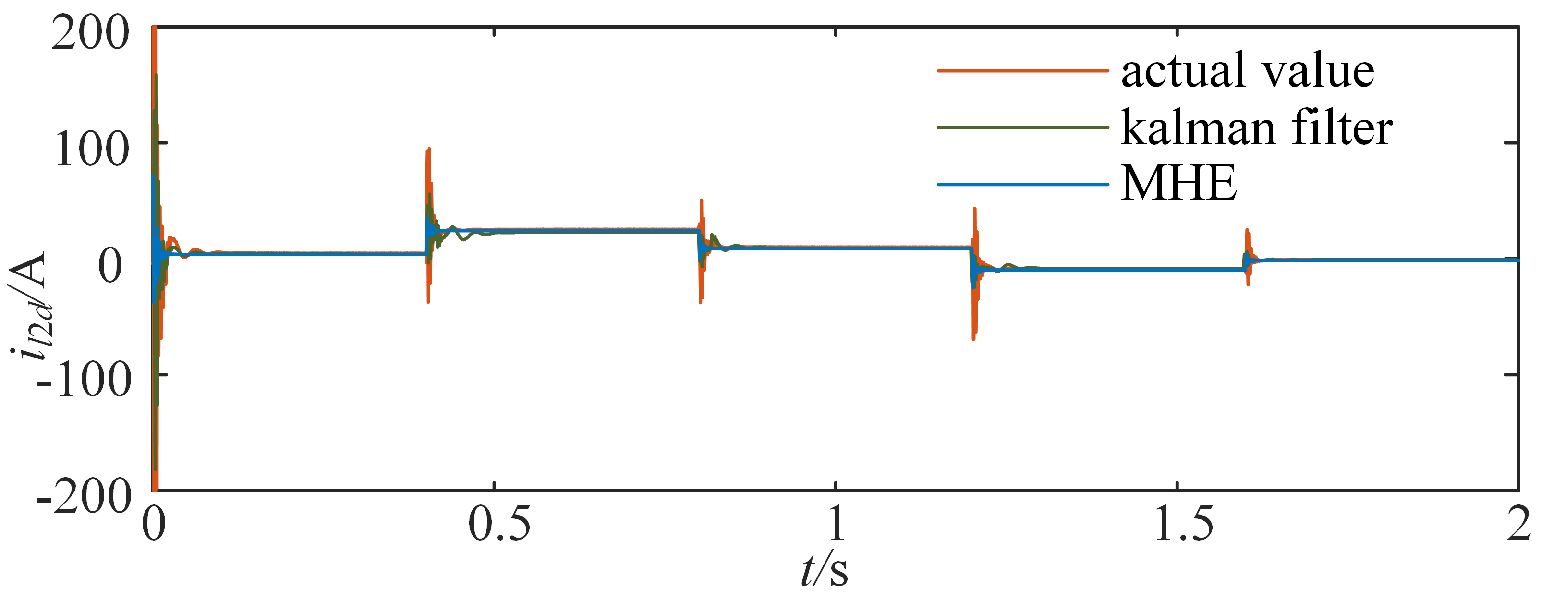
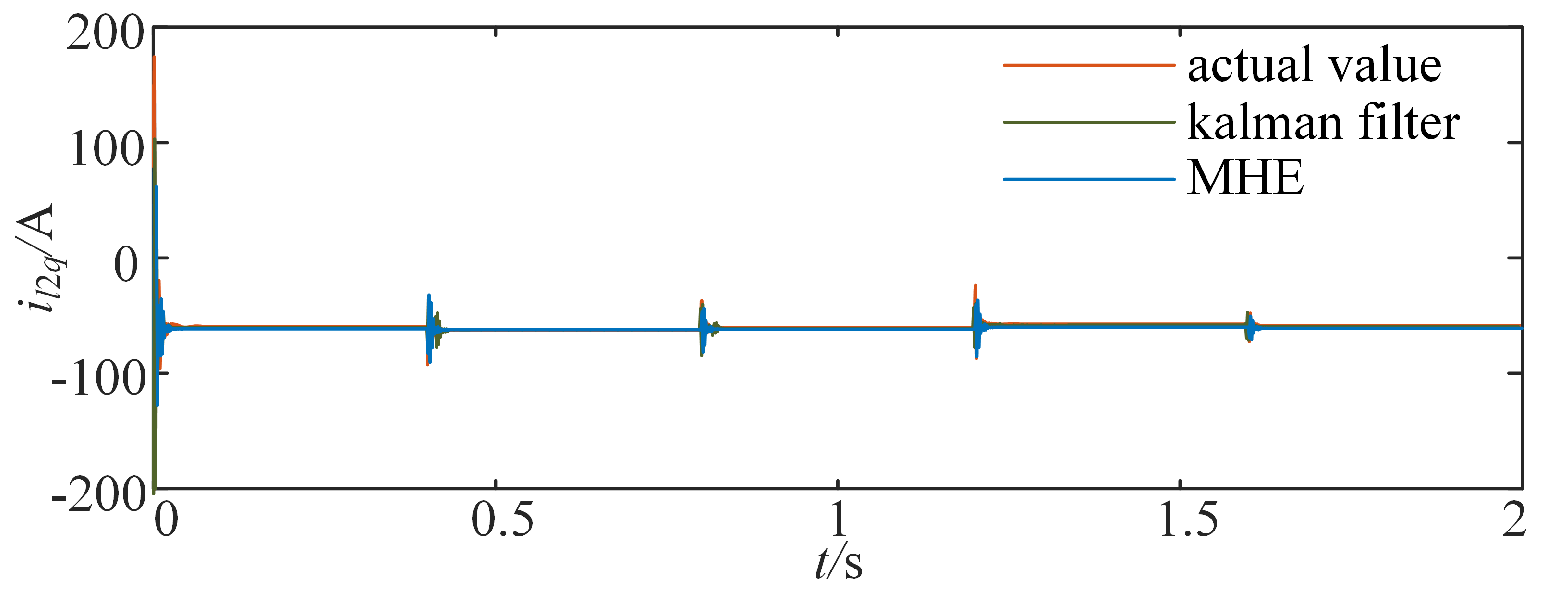
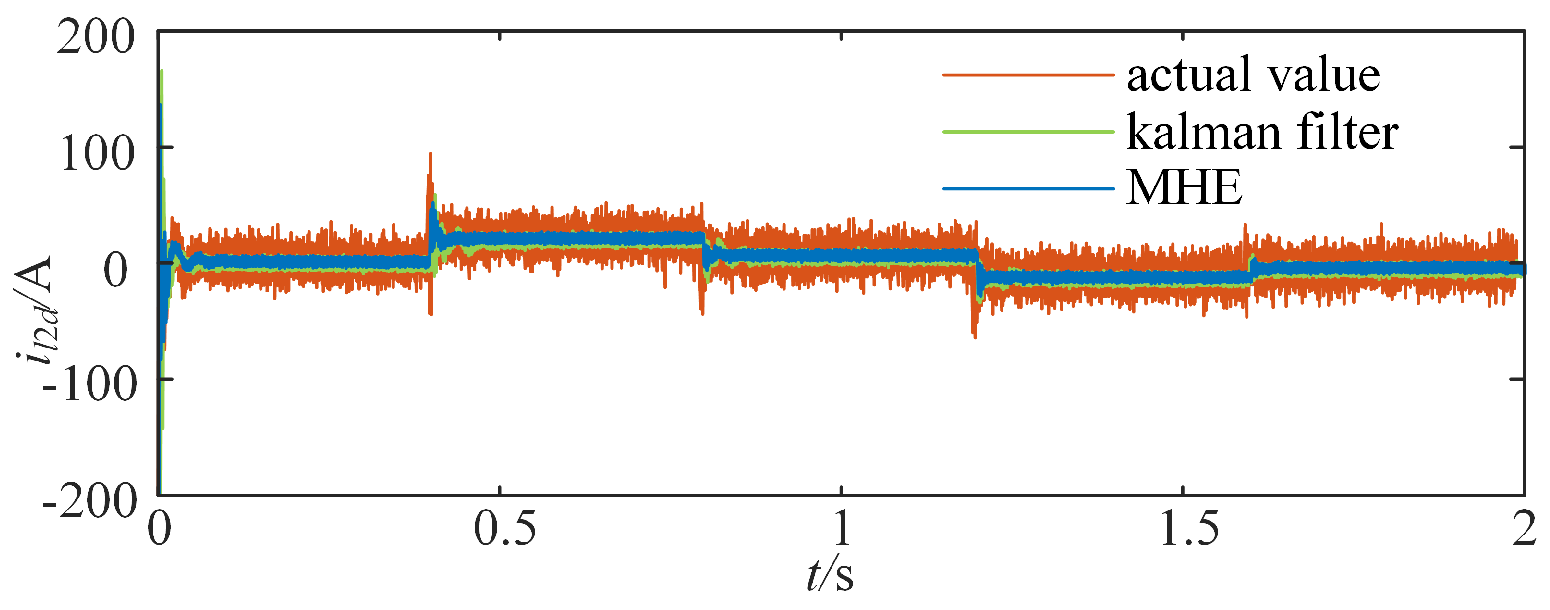
5.2. Robustness of Control Against Parameter Perturbation and Measurement Noise
5.3. Voltage Control with MHE-Based MPC
5.4. Voltage Control with Cooperative MHE-Based MPC Considering Time Delay
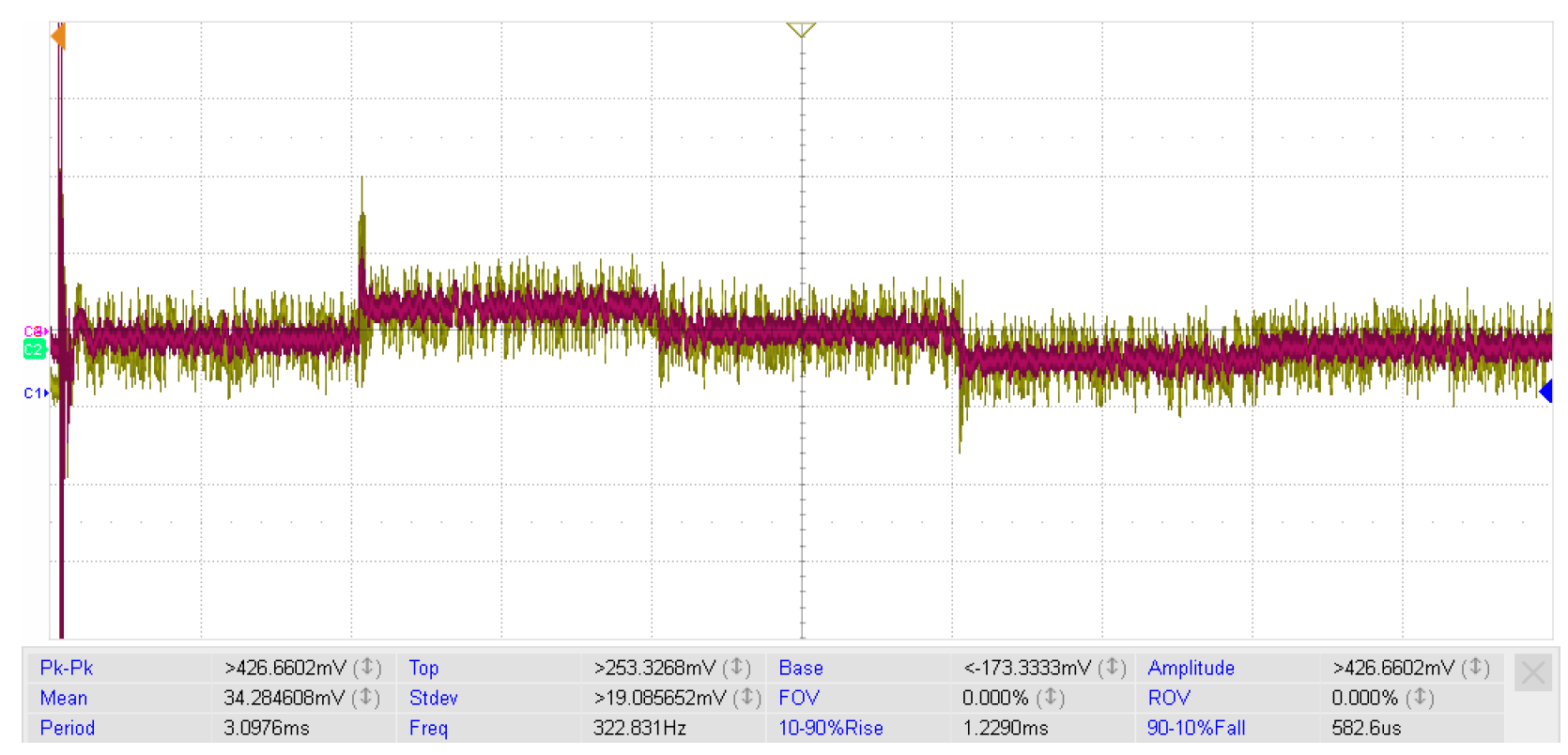
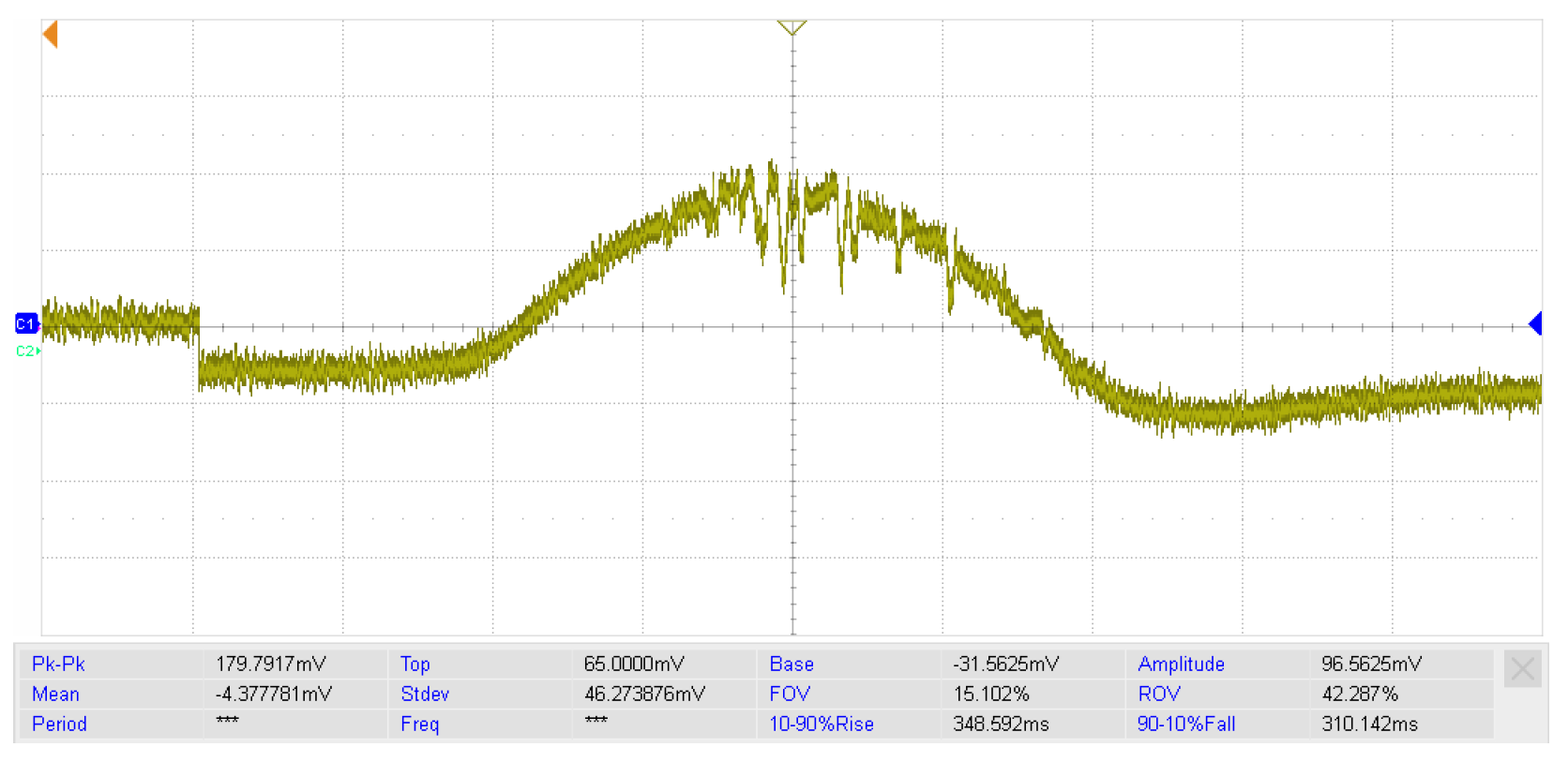
5.5. Experimental Tests
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Ufa, R.; Malkova, Y.Y.; Rudnik, V.; Andreev, M.; Borisov, V. A review on distributed generation impacts on electric power system. Int. J. Hydrogen Energy 2022, 47, 20347–20361. [Google Scholar] [CrossRef]
- Al Sumarmad, K.A.; Sulaiman, N.; Wahab, N.I.A.; Hizam, H. Energy management and voltage control in microgrids using artificial neural networks, PID, and fuzzy logic controllers. Energies 2022, 15, 303. [Google Scholar] [CrossRef]
- Chen, N.; Du, Z.; Du, W. Optimal Regulation Strategy of Distribution Network with Photovoltaic-Powered Charging Stations Under Multiple Uncertainties: A Bi-Level Stochastic Optimization Approach. Electronics 2024, 13, 4600. [Google Scholar] [CrossRef]
- Gallegos, J.; Arévalo, P.; Montaleza, C.; Jurado, F. Sustainable electrification—Advances and challenges in electrical-distribution networks: A review. Sustainability 2024, 16, 698. [Google Scholar] [CrossRef]
- Le, J.; Qi, G.; Liao, X.; Zhao, L.; Jin, R. Research on voltage and power control strategy of distribution network. Int. J. Electron. 2024, 111, 204–222. [Google Scholar] [CrossRef]
- Mumtahina, U.; Alahakoon, S.; Wolfs, P. A Day-Ahead Optimal Battery Scheduling Considering the Grid Stability of Distribution Feeders. Energies 2025, 18, 1067. [Google Scholar] [CrossRef]
- Diahovchenko, I.; Morva, G.; Chuprun, A.; Keane, A. Comparison of voltage rise mitigation strategies for distribution networks with high photovoltaic penetration. Renew. Sustain. Energy Rev. 2025, 212, 115399. [Google Scholar] [CrossRef]
- Guo, Y.; Fu, Y.; Li, J.; Chen, J. Optimizing Reactive Compensation for Enhanced Voltage Stability in Renewable-Integrated Stochastic Distribution Networks. Processes 2025, 13, 303. [Google Scholar] [CrossRef]
- Sun, W.; Zhang, L.; Lv, Q.; Liu, Z.; Li, W.; Li, Q. Dynamic collaborative optimization of end-to-end delay and power consumption in wireless sensor networks for smart distribution grids. Comput. Commun. 2023, 202, 87–96. [Google Scholar]
- Du, Y.; Lu, X.; Tang, W. Accurate Distributed Secondary Control for DC Microgrids Considering Communication Delays: A Surplus Consensus-Based Approach. IEEE Trans. Smart Grid 2022, 13, 1709–1719. [Google Scholar]
- Srinivas, V.L.; Wu, J. Topology and Parameter Identification of Distribution Network using Smart Meter and μPMU Measurements. IEEE Trans. Instrum. Meas. 2022, 71, 9004114. [Google Scholar]
- Zhang, J.; Wang, Y.; Weng, Y.; Zhang, N. Topology identification and line parameter estimation for non-PMU distribution network: A numerical method. IEEE Trans. Smart Grid 2020, 11, 4440–4453. [Google Scholar]
- Matijašević Pilski, T.; Capuder, T.; Havelka, J. Identifying distribution network line parameters and voltage angles by utilizing physical knowledge: A neural network approach. Sustain. Energy Grids Netw. 2025, 41, 101606. [Google Scholar]
- Zhang, T.; Wang, X.; Parisio, A. A corrective control framework for mitigating voltage fluctuations and congestion in distribution networks with high renewable energy penetration. Int. J. Electr. Power Energy Syst. 2025, 165, 110508. [Google Scholar]
- Souri, S.; Shourkaei, H.M.; Soleymani, S.; Mozafari, B. Flexible reactive power management using PV inverter overrating capabilities and fixed capacitor. Electr. Power Syst. Res. 2022, 209, 107927. [Google Scholar]
- Xu, X.; Wang, Q.; Liao, J.; Chi, Y.; Huang, T.; Zhou, N.; Zhou, Y.; Zhang, X. Static voltage stability margin evaluation for a DC distribution network with DC electric springs. Int. J. Electr. Power Energy Syst. 2025, 165, 110503. [Google Scholar]
- alwez, M.A.; Jasni, J.; MohdRadzi, M.A.; Azis, N. Adaptive reactive power control for voltage rise mitigation on distribution network with high photovoltaic penetration. Renew. Sustain. Energy Rev. 2025, 207, 114948. [Google Scholar]
- Mahmoodi, S.; Tarimoradi, H. A Novel Partitioning Approach in Active Distribution Networks for Voltage Sag Mitigation. IEEE Access 2024, 12, 149206–149220. [Google Scholar]
- Rhannouch, Y.; Saadaoui, A.; Gaga, A. Analysis of the impacts of electric vehicle chargers on a medium voltage distribution network in Casablanca City. e-Prime-Adv. Electr. Eng. Electron. Energy 2025, 11, 100879. [Google Scholar]
- Louis, A.; Ledwich, G.; Mishra, Y.; Walker, G. PQ-Based Local Voltage Regulation for Highly Resistive Radial Distribution Networks. IEEE Trans. Power Syst. 2023, 38, 4240–4251. [Google Scholar]
- Ge, P.; Chen, B.; Teng, F. Cyber-Resilient Self-Triggered Distributed Control of Networked Microgrids Against Multi-Layer DoS Attacks. IEEE Trans. Smart Grid 2023, 14, 3114–3124. [Google Scholar]
- Yao, W.; Wang, Y.; Xu, Y.; Deng, C.; Wu, Q. Distributed weight-average-prediction control and stability analysis for an islanded microgrid with communication time delay. IEEE Trans. Power Syst. 2021, 37, 330–342. [Google Scholar] [CrossRef]
- Lu, X.; Lai, J. Communication constraints for distributed secondary control of heterogenous microgrids: A survey. IEEE Trans. Ind. Appl. 2021, 57, 5636–5648. [Google Scholar] [CrossRef]
- Yang, T.; He, Y.; Liu, G.P. Distributed Voltage Restoration of AC Microgrids Under Communication Delays: A Predictive Control Perspective. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 2614–2624. [Google Scholar] [CrossRef]
- Ahumada, C.; Cárdenas, R.; Saez, D.; Guerrero, J.M. Secondary control strategies for frequency restoration in islanded microgrids with consideration of communication delays. IEEE Trans. Smart Grid 2015, 7, 1430–1441. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.; Yan, J.; Cheng, P. Research on multi-time scale Volt/VAR optimization in active distribution networks based on NSDBO and MPC approach. Electr. Power Syst. Res. 2025, 238, 111141. [Google Scholar] [CrossRef]
- Lv, Y.; Dou, X.; Bu, Q.; Xu, X.; Lv, P.; Zhang, C.; Qi, Z. Tube-based MPC of hierarchical distribution network for voltage regulation considering uncertainties of renewable energy. Electr. Power Syst. Res. 2023, 214, 108875. [Google Scholar] [CrossRef]
- Souto, L.; Parisio, A.; Taylor, P.C. MPC-based framework incorporating pre-disaster and post-disaster actions and transportation network constraints for weather-resilient power distribution networks. Appl. Energy 2024, 362, 123013. [Google Scholar] [CrossRef]
- Song, G.; Wu, Q.; Tan, J.; Jiao, W.; Chen, J. Stochastic MPC based double-time-scale voltage regulation for unbalanced distribution networks with distributed generators. Int. J. Electr. Power Energy Syst. 2024, 155, 109687. [Google Scholar]
- Stanojev, O.; Markovic, U.; Aristidou, P.; Hug, G.; Callaway, D.S.; Vrettos, E. MPC-based fast frequency control of voltage source converters in low-inertia power systems. IEEE Trans. Power Syst. 2020, 37, 3209–3220. [Google Scholar]
- Ademola-Idowu, A.; Zhang, B. Frequency stability using MPC-based inverter power control in low-inertia power systems. IEEE Trans. Power Syst. 2020, 36, 1628–1637. [Google Scholar]
- Maharjan, S.; Khambadkone, A.M.; Peng, J.C.H. Robust constrained model predictive voltage control in active distribution networks. IEEE Trans. Sustain. Energy 2020, 12, 400–411. [Google Scholar]
- Zhang, S.; Chen, S.; Gu, W.; Lu, S.; Chung, C.Y. Dynamic optimal energy flow of integrated electricity and gas systems in continuous space. Appl. Energy 2024, 375, 124052. [Google Scholar]
- Zhang, S.; Pan, G.; Li, B.; Gu, W.; Fu, J.; Sun, Y. Multi-Timescale Security Evaluation and Regulation of Integrated Electricity and Heating System. IEEE Trans. Smart Grid 2025, 16, 1088–1099. [Google Scholar] [CrossRef]
- Isidori, A. Nonlinear Control Systems; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Khazaei, J.; Tu, Z.; Asrari, A.; Liu, W. Feedback linearization control of converters with LCL filter for weak AC grid integration. IEEE Trans. Power Syst. 2021, 36, 3740–3750. [Google Scholar]
- Raković, S.V.; Levine, W.S. Handbook of Model Predictive Control; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Capacity | Location | Parameter | Capacity | Location |
|---|---|---|---|---|---|
| ES1 | 500 kW | 711 | PV1 | 1 MW | 738 |
| ES2 | 500 kW | 720 | PV2 | 1 MW | 734 |
| ES3 | 600 kW | 744 | PV3 | 1 MW | 704 |
| ES4 | 600 kW | 737 | PV4 | 1 MW | 709 |
| ES5 | 600 kW | 708 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Y.; Dou, X.; Zhang, K.; Zhang, Y. A Cooperative MHE-Based Distributed Model Predictive Control for Voltage Regulation of Low-Voltage Distribution Networks. Symmetry 2025, 17, 513. https://doi.org/10.3390/sym17040513
Lv Y, Dou X, Zhang K, Zhang Y. A Cooperative MHE-Based Distributed Model Predictive Control for Voltage Regulation of Low-Voltage Distribution Networks. Symmetry. 2025; 17(4):513. https://doi.org/10.3390/sym17040513
Chicago/Turabian StyleLv, Yongqing, Xiaobo Dou, Kexin Zhang, and Yi Zhang. 2025. "A Cooperative MHE-Based Distributed Model Predictive Control for Voltage Regulation of Low-Voltage Distribution Networks" Symmetry 17, no. 4: 513. https://doi.org/10.3390/sym17040513
APA StyleLv, Y., Dou, X., Zhang, K., & Zhang, Y. (2025). A Cooperative MHE-Based Distributed Model Predictive Control for Voltage Regulation of Low-Voltage Distribution Networks. Symmetry, 17(4), 513. https://doi.org/10.3390/sym17040513