1. Introduction
There have been many experiments that show that the mechanical behavior of materials at small scales is different from their behavior at macro scales (e.g., Poncharal et al. [
1] and Salvetat et al. [
2]). Correspondingly, this requires a continuum mechanics theory that accounts for size effects and reduces to classical continuum mechanics when the size effect is negligible. In order to have a length scale in such a theory, couple stresses with moments
inevitably appear along with force stresses
in a complete theory of continuum mechanics. As a result, the force stress tensor
is not symmetric as is the case in classical theory. Voigt [
3] was the first to postulate the existence of couple stresses in continuum mechanics. Later, Cosserat and Cosserat [
4] developed the original mathematical model for couple stress continuum mechanics. Mindlin and Tiersten [
5] and Koiter [
6] developed an initial version of couple stress theory, which uses the four foundational mechanical quantities (i.e., force, displacement, couple, rotation) that are compatible with linear and angular momentum principles in continuum mechanics. Subsequently, Stokes [
7] brought this formulation into fluid mechanics to model the size dependency effect in fluids. However, this original couple stress theory suffers from some fundamental inconsistencies, which are mainly:
The indeterminacy in the spherical part of the couple stress moment tensor ;
The inconsistency in boundary conditions, as the normal component of couple traction moment vector appears in the formulation;
The appearance of the body couple moment in the relation for the force stress tensor.
The appearance of the indeterminacy of the spherical part of the couple stress moment tensor is troublesome in most cases, especially those with torsional deformation. Surprisingly, Koiter [
6] and Stokes [
7] make the claim that without any loss of generality, the indeterminate spherical part may be taken as equal to zero to make the couple stress tensor deviatoric. However, a deviatoric couple stress theory, where
, is a non-physical theory and still suffers from ill-posed boundary conditions. Surprisingly, in this deviatoric theory, a uniaxial torsional deformation with a distribution of uniform normal couple stress becomes impossible. Based on physical grounds, if one can exert torsional couple stresses
,
, and
on some element of the body, these three components must be independent of each other. However, the mathematical deviatoric condition
contradicts this physical fact. Enforcing this condition is as absurd as enforcing the mathematical constraint
on the force stress tensor in classical continuum mechanics theory. The three components
,
, and
acting on any element of the body are generally independent of each other. More discussion on the original couple stress theory can be found in [
8].
Eringen [
9] realized this indeterminacy as a major mathematical problem in the Mindlin, Tiersten, and Koiter couple stress theory. As a result, he called this theory the indeterminate couple stress theory. It is obvious that to have a consistent couple stress theory, it is necessary to resolve the inconsistencies, especially the criticism of Eringen [
9] about the indeterminacy of the couple stress moment tensor.
More recently, Hadjesfandiari and Dargush [
10] have demonstrated the subtle skew-symmetric character of the couple stress moment tensor
and the impossibility of an independent body couple distribution in the continuum. This has been achieved by examining kinematics, well-posed boundary conditions, and the virtual work principle. Elements of establishing this character are based on the work by Mindlin and Tiersten [
5] and Koiter [
6], which established the impossibility of normal couple traction (surface couple traction with normal moment) in a continuum. It is remarkable to note that the well-posed form of boundary conditions imposes the skew-symmetric character of the couple stress moment tensor (Hadjesfandiari and Dargush [
10] and Hadjesfandiari et al. [
11]. Interestingly, this development shows that there is an interrelationship between the consistent mechanical boundary conditions and the determinacy of the couple stress moment tensor: resolving one resolves the other.
This theory has already provided a fundamental basis for the development of size-dependent theories in many multi-physics disciplines, such as size-dependent piezoelectricity (i.e., flexoelectricity) [
12] and size-dependent thermoelasticity [
13]. Remarkably, this theory has recently demonstrated its self-consistency by resolving fundamental issues in the existing continuous defect theory, which has resulted in consistent continuous defect theory [
14]. In this theory, the dislocation density tensor is skew-symmetric analogous to the mean curvature tensor and can be represented by a vector. Interestingly, this development also establishes the dualism between geometry and statics of consistent continuous defect theory.
This determinate couple stress theory has enjoyed an increasing number of applications in many branches of mechanics. Jensen and Revell [
15] used the theory in the vertex model of cellular monolayers. This theory has been successfully employed to analyze micro/nano-beam, -plate, and -shell structures [
16,
17,
18,
19,
20,
21,
22]. The size effect in elastic waves based on this theory has been studied by [
23,
24,
25,
26]. Fundamental solutions in the framework of this consistent couple stress theory have also been developed [
27,
28]. There have been some computational mechanics developments, such as finite element and boundary element methods, based on this theory [
27,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38]. Furthermore, this consistent couple stress theory has been successfully used to investigate the state of stresses in nano-/micro-contact mechanics [
39,
40].
Although the discovery of the skew-symmetric character of the couple stress moment tensor
resolves the quest for the consistent continuum mechanics (Hadjesfandiari and Dargush [
10]; Hadjesfandiari et al. [
11]), its form of establishment seems very intriguing. One might ask why it is necessary to use the concept of work and kinematics and specify the independent degrees of freedom as well as their conjugate generalized forces, or if there exists any other method to establish this statement. Moreover, this method of proof does not specify the mechanism of action of couple tractions and couple stresses. Experience shows that there are usually a few different methods to prove a lemma. Here, it is demonstrated that this is the case, and the skew-symmetric character of the couple stress moment tensor
is established by a different fundamental method, which does not depend on using the work concept and kinematics. This character is systematically established by examining the concepts of moment and couple and the fundamental governing equations. Remarkably, this new fundamental method of proof is more complete because it reveals the mechanism of action of couple traction as a double layer of shear force tractions.
First, it is shown that representing the moment of a force using a vector in mechanics, although quite convenient, has been very misleading. This is because it usually gives the impression that a moment is a vector exerted to a point (moment center) like a concentrated force. However, the vector moment of a force is a pseudo-vector without any real vectorial character. Interestingly, the moment of a force is a skew-symmetric second-order true tensor. Because working with a skew-symmetric moment tensor is awkward in practice, its dual pseudo-vector has become standard. Remarkably, this vectorial representation of moment also simplifies the governing equations in mechanics.
However, using this misperception has been more misleading for a couple. As it is known, the moment of a couple remains the same for all points and directly appears in the governing equations of motion or equilibrium. It is only in rigid body mechanics that the effect of a couple is completely represented by its moment vector because the state of stresses and deformation are not considered. Note that replacing this couple by a different equipollent couple does not change the state of equilibrium or motion of the rigid body. Therefore, in rigid body mechanics, a couple is considered equivalent to its moment, which is also treated as a free vector. However, when one studies the deformation and internal stresses in continuum mechanics, the couple moment is not a free vector and cannot completely describe its effect. This is also the case for a concentrated couple, where the line of action of its opposite parallel concentrated forces are approaching each other. To specify the effect of a concentrated couple in continuum mechanics, either its constituent opposite parallel forces or its moment and the line of action of these parallel forces must be specified. As will be shown, the incomplete representation of a general couple by its pseudo-vector moment is the main reason for the indeterminacy of the couple stress tensor in the original couple stress theory. In this original theory, it was assumed that the general distributions of body couples and couple stresses can exist and can be completely represented by their moment densities without any restriction. This can be attributed to the fact that in the governing equations of equilibrium or motion of the continuum, boundary conditions, and constitutive relations, only the moment of the body couple, moment of the couple tractions, and moment of the couple stresses appear without specifying the line of action of any couple density forces. However, this results in the non-uniqueness of the state of stresses and deformation in the continuum, which has shown itself in the indeterminacy of the couple stress tensor in Mindlin–Tiersten–Koiter couple stress theory. Nevertheless, the physical state of stress and deformation in the continuum is unique and determinate. Obviously, this contradiction enforces some restrictions on the form of distribution of body couples, couple tractions, and couple stresses so that their effect is completely described by their moment densities without requiring the specification of the line of action of opposite parallel constituent couple forces. In this paper, the uniqueness of interactions in the continuum is used to establish that:
An independent distribution of body couples does not exist;
A distribution of surface twisting couple tractions (with a normal moment) does not exist on any arbitrary surface;
A distribution of surface bending couple tractions (with a tangential moment) can exist;
The surface bending couple traction is a double layer of shear force tractions;
The pseudo-moment tensor of couple stresses is skew-symmetric and has a true vectorial character.
This development shows more fundamentally why arbitrary surface and body couple distributions cannot be completely represented by their moment densities in a consistent couple stress theory. Importantly, this development also reveals the character of tangential bending couple traction as a double layer of shear force tractions. Interestingly, this is the tensorial analogy of a double layer in electrostatics, where a single tangential shear force traction distribution is analogous to a single layer of electric charge.
The remainder of the paper is organized as follows.
Section 2 provides an overview of some important aspects of mechanics. This includes the review of forces and their moments, the governing equations of motion for a system of particles, and the equipollent system of forces.
Section 3 briefly presents the concepts of a couple and its moment, a concentrated couple, and the reduction of a system of forces to an equipollent system of one force and one couple. It is seen that in rigid body mechanics, and to some extent in the strength of materials and structural mechanics, equipollent systems of forces are equivalent.
Section 4 considers the state of loading in continuum mechanics by reviewing the body force, body couple, surface force traction, and couple traction.
Section 5 provides the governing equations in continuum mechanics by introducing force and couple stresses. In this section, the uniqueness of interactions in continuum mechanics is discussed. Afterwards, by using this uniqueness or determinacy character, the impossibility of a distribution of a body couple and a distribution of a surface twisting couple traction is established in
Section 6. From this, the mechanism of action of the couple traction as a double layer of shear force tractions and the skew-symmetric character of a couple stress moment tensor in continuum mechanics are established. Finally, a summary and some general conclusions are presented in
Section 7.
2. Preliminaries
Let us consider the three dimensional orthogonal right-handed (positive) coordinate system as the reference frame with unit base vectors , , and . This is the coordinate system used to represent the components of fundamental vectors, tensors, and vector and tensor equations.
2.1. Forces and Their Moments
Point forces acting on individual particles and bodies are concentrated forces. This means that a force vector is characterized by its magnitude, point of application, and its direction.
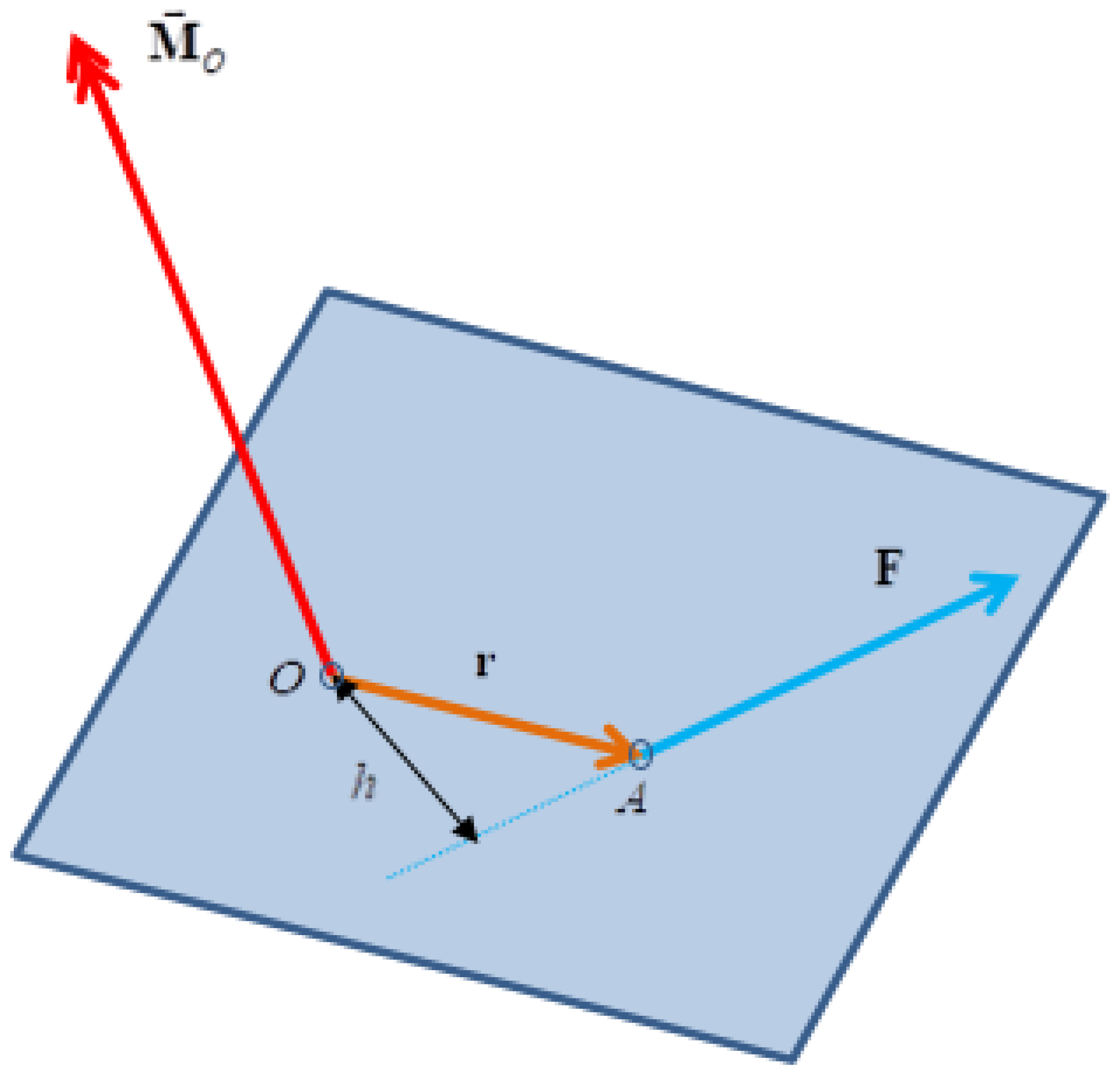
Consider the force
acting at point
A with the position vector
relative to fixed point
O, as shown in
Figure 1.
Although it is possible to define the dyadic product
(
) as a general moment, it turns out that the skew-symmetric part of this tensor plays an important role in mechanics. Therefore, the tensorial moment of the force
at
about the point
O, called the moment center, is defined as
where
In terms of components, this skew-symmetric moment tensor can be written as
As this tensor is specified by three independent components, it looks more convenient to represent it by its dual pseudo-vector or axial vector
(
Figure 1), where
Here,
is the Levi-Civita alternating symbol. Interestingly, the dual relations are
where
It should be noted that the moment vector
, defined by the vector product (cross-product)
, is perpendicular to the plane containing point
O and force vector
. The magnitude of this moment vector is
, where
is the perpendicular distance of point
O to the line of action of force
. By definition, the pseudo-vector (axial vector)
is attributed to the point
O, as shown in
Figure 1. Note that the moment vector
has been presented as double-headed arrows. It should also be mentioned that the moment of the force vector
can be considered about many arbitrary points simultaneously. It is obvious that the vector moment
is not applied at the point
O physically; it is only the force
, which acts at the point
A, not its moment. Although the representation of moment of a force by a pseudo-vector has been very convenient in practice, it has created some troubles in the progress of continuum mechanics. This will be illustrated in detail in subsequent sections.
As the second-order moment tensor
is skew-symmetric, it is singular. This means its determinant vanishes:
As a result, the tensor
has a zero eigenvalue. Interestingly, the eigenvector corresponding to this zero eigenvalue is in the direction of the pseudo-vector
; thus,
The skew-symmetric tensor or its more popular dual moment vector , which is also preferred in this paper, are very important from a physical point of view. This will be reviewed next, where governing equations of a system of particles are presented.
2.2. Fundamental Governing Equations of Motion for a System of Particles
Consider the motion of a particle with mass
under the influence of the resultant force
. The location of the particle in space at time
is specified by the position vector
. The velocity and acceleration vectors are defined as
and
, respectively. The governing equations of motion of the particle are given by Newton’s second law as
where the vector
is called an effective force. Therefore, the vector Equation (10), which is also called the force equation, states that the resultant force
acting on the particle equals the effective force
.
Now, consider a system of particles interacting with each other. This system can represent a continuous body with infinite particles. The Equation (10) can be considered for each particle. Note that the resultant force
for each particle can be decomposed as
Here, is the external resultant force, whereas represents the internal resultant force on the particle exerted by other particles in the system.
By adding the force and moment equations about point
O for all individual particles in the system, one obtains
Note that the total force
and the total moment
are a combination of the external and internal forces and moments, respectively, where
However, due to Newton’s third law of action and reaction, the effect of internal forces and moments disappear, that is
and
(Goldstein [
41], Beer and Johnston [
42], and Shames [
43]). Therefore, the force and moment equations for the system of particles become
These equations state that the resultant external force and the resultant external moments are equal to the total effective force and effective moment , respectively. Interestingly, this result shows that Newton’s third law of action and reaction is the reason for defining the moment of a force by (4) so that the effect of internal moments disappears for a system of particles. Therefore, it is realized that although defining higher moments of forces and momentum is possible, they do not have fundamental significance from a physical point of view. For example, defining the dyadic product () and its symmetric part () as general moments does not result in governing equations, because the effect of these moments for internal forces does not vanish for a system of particles. However, it is noted that the state of stresses and governing equations in distortion gradient theory and strain gradient theory are based on defining moments as and , respectively. Surprisingly, in the development of modified couple stress theory, a new non-physical equilibrium equation based on the higher moment has been introduced. If adding new moment equations were possible, there would not have been any indeterminate structure! It is only the skew-symmetric part of the tensor () defined in (1) that plays a fundamental role in mechanics. It is seen that not paying attention to the fundamental concepts of mechanics in standard texts has been the main reason for confusion in continuum mechanics and for the creation of so many theories, such as indeterminate couple stress theory, modified couple stress theory, micropolar theory, various gradient theories, and micromorphic theories.
Therefore, it is very important to note that the two vectorial Equations (16) and (17) are the only possible equations for the system of particles, in which the internal forces and internal moments are cancelled based on Newton’s third law of action and reaction. This is the reason why these equations are considered as fundamental governing equations for system of particles or a continuum body. These governing Equations (16) and (17) can be used to describe the motion of bodies in integral form. This will be discussed in
Section 3. However, note that the governing Equations (16) and (17) are not enough to describe the motion of a system of particles or a deformable body. To study these systems, it is necessary to consider the individual particle or an infinitesimal element of matter, which means applying Newton’s second law (10) to individual particles or applying the governing Equations (16) and (17) to all infinitesimal elements of matter for a continuum.
Also note that the moment equation regarding any other arbitrary point can be written as a linear combination of the force and moment Equations (16) and (17). Therefore, the governing moment equation about point
is not a new independent governing equation.
By introducing the concept of total linear momentum
and total angular momentum
for the system of particles as
the force and moment Equations (16) and (17) can be expressed as
The total linear momentum
and effective forces
can be simplified by the introduction of the center of mass [
41,
42,
43].
When the resultant external forces vanish, i.e.,
in the force governing Equation (21), the total linear momentum of the system
is conserved. If the external moment about point
O is zero, i.e.,
in the moment governing Equation (22), the total angular momentum
is conserved about point
O. Note that based on Noether’s theorem (Noether [
44]), conservation laws are the result of the symmetry properties of nature. In mechanics, the conservation laws of linear and angular momentum are the result of the translational and rotational symmetry of space, respectively.
2.3. Equipollent System of Forces
If two systems of forces have the same resultant force
and the same resultant moment
about an arbitrary point
O, they are called equipollent [
42]. Interestingly, the system of internal forces is equipollent to zero (
= 0 and
). However, this does not mean the internal forces have no effect on the state of motion of individual particles or elements of matter.
Remarkably, Equations (16) and (17) express the fact that the systems of external forces and effective forces are equipollent. This means these systems have the same resultant and same resultant moment about any point.
The governing Equations (16) and (17) show that if the system of external forces is replaced with an equipollent force system in their left-hand sides, their right-hand sides do not change. This means the system of effective forces changes to a new equipollent system of effective forces. However, note that the internal forces, and condition of equilibrium, and motion of individual particles can change in this replacement. Therefore, the systems of equipollent forces acting on a deformable body are not equivalent because they create different states of stress and deformation.
3. The Concept of Couples in Mechanics
In this section, the important concept of couples in mechanics is introduced, and their character in continuum mechanics is investigated. The effect of a couple cannot be completely represented by its moment vector in continuum mechanics, especially when the deformation and internal stresses in continuum mechanics are studied.
3.1. Couples and Their Moments
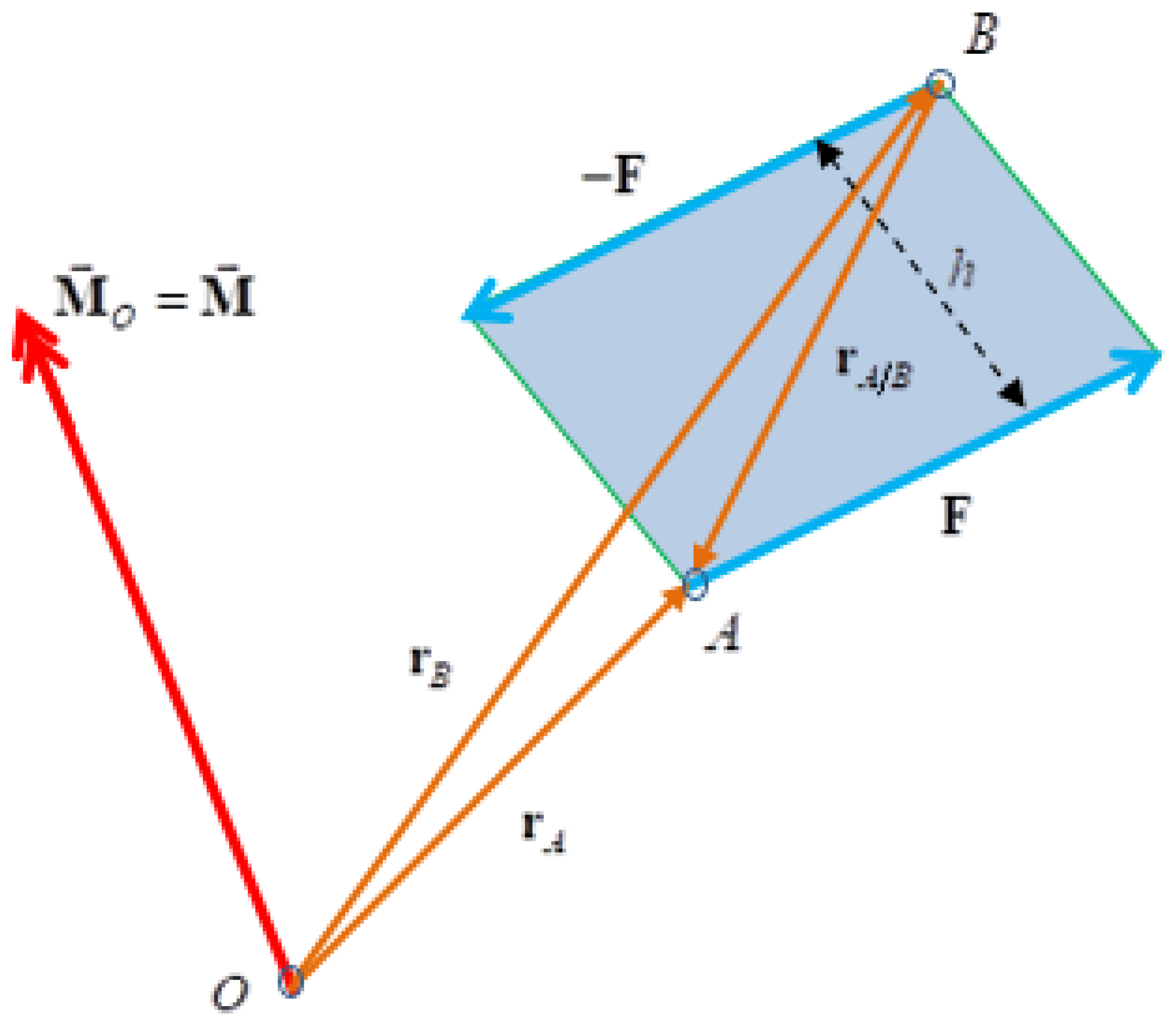
The system of two parallel forces
and
, which have the same magnitude but opposite direction, form a couple (
Figure 2). Let us denote the position vectors of the points of application of
and
with
and
, respectively. The sum of the moment of forces
about any arbitrary point
is the same
where
is the vector joining the position vectors
and
. The constant vector
is called the moment of the couple, which is perpendicular to the plane of the two forces. Note that the magnitude of this constant moment
is
, where
is the perpendicular distance of the line of action of forces (
Figure 2).
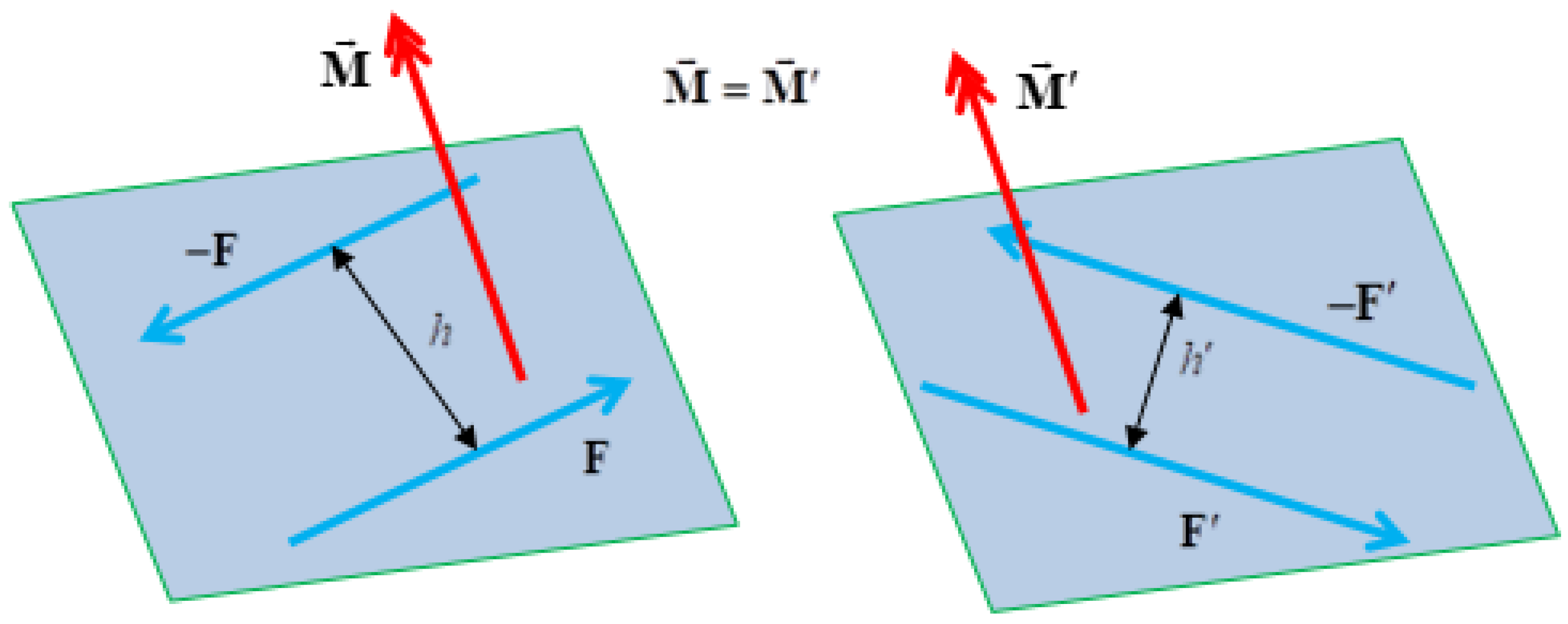
Note that there are an infinite set of equipollent couples with the vector moment
. For example, the system of couple forces
and
is equipollent to the system of couple forces
and
with the same moment
(
Figure 3). However, these equipollent couples are not equivalent because they create different states of stress and deformation in the body.
Based on the definition, the pseudo-vector moment can be attributed to any arbitrary point. However, this has given the impression that couple is the vector moment acting on the body. This incorrect notion seems to have been more convincing for a concentrated couple, as will be discussed next.
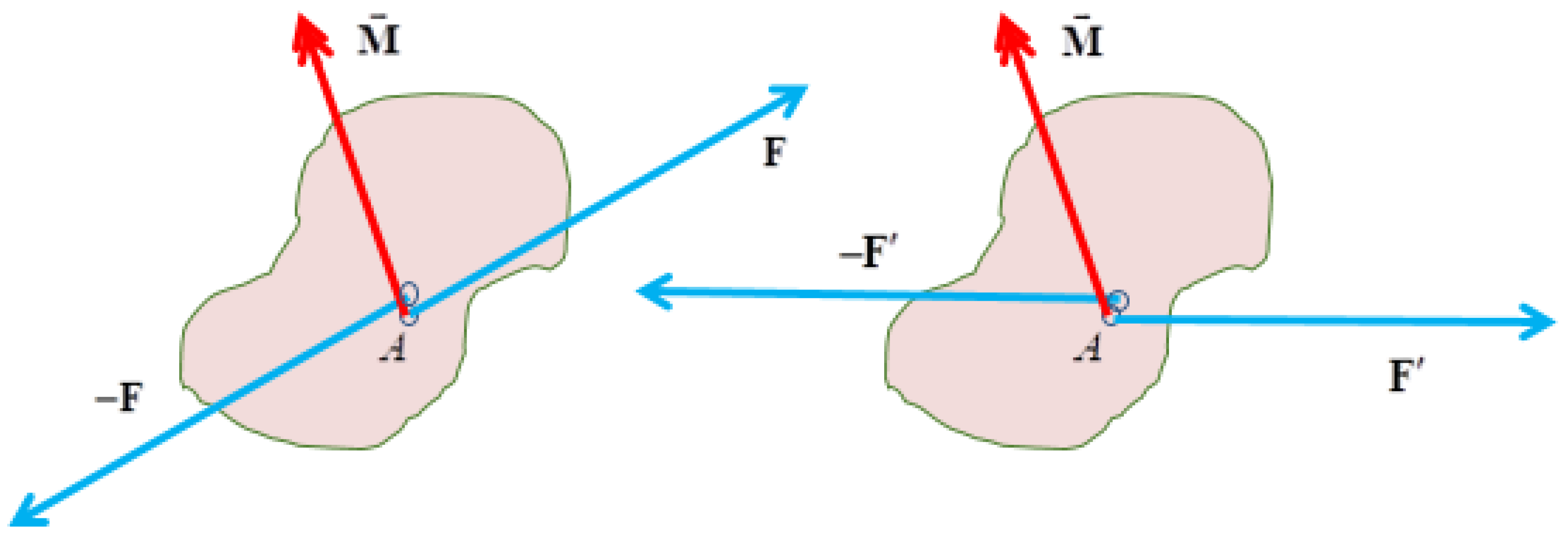
3.2. Concentrated Couples
In couple stress theory, the concept of a concentrated couple plays a fundamental role. A concentrated couple with moment
acting at point
A can be considered as the limit of system of parallel forces
and
when
B approaches
A, such that the moment vector
remains constant (
Figure 4). This means that the perpendicular distance
approaches zero, whereas
(the magnitude of
) approaches infinity, such that
Although the moment of concentrated couple
can still be attributed to any arbitrary point, it is usually attributed to the limiting point at
A (
Figure 5). However, this has been very misleading because:
It has given the false notion that the moment vector is a real vector exerted to the point A, analogous to application of a force to a point;
It has given the false impression that the couple moment vector by itself completely describes the effect of a concentrated couple at A.
However, it is only the forces
and
that are acting on the body, not the moment vector
. Note that if
had been defined based on a left-hand rule in (23), its direction would have been opposite. Furthermore, the effect of the concentrated couple with moment
acting at point
A is not completely specified by the moment
. The vector
does not uniquely specify the force system
and
at
A. Note that there are countless sets of infinitely long parallel concentrated forces at point
A with the same moment
. For example, the concentrated couple with moment
acting at
A can be the result of either the equipollent concentrated couples with concentrated forces
and
or concentrated forces
and
in
Figure 6. However, the deformation and state of stresses in the body are different, even for these two equipollent concentrated couples. Interestingly, if the material is isotropic and infinitely extended, the deformation and state of stresses from the effect of couple with concentrated forces
and
can be obtained by rotating the deformation and state of stresses from the effect of a couple with concentrated forces
and
with the same angle of rotation of
to
(
Figure 6).
The specification of concentrated couple moment at point A specifies the plane of parallel couple forces and , not their directions. This clearly shows that the effect of a concentrated couple cannot be completely defined by the moment vector at point A.
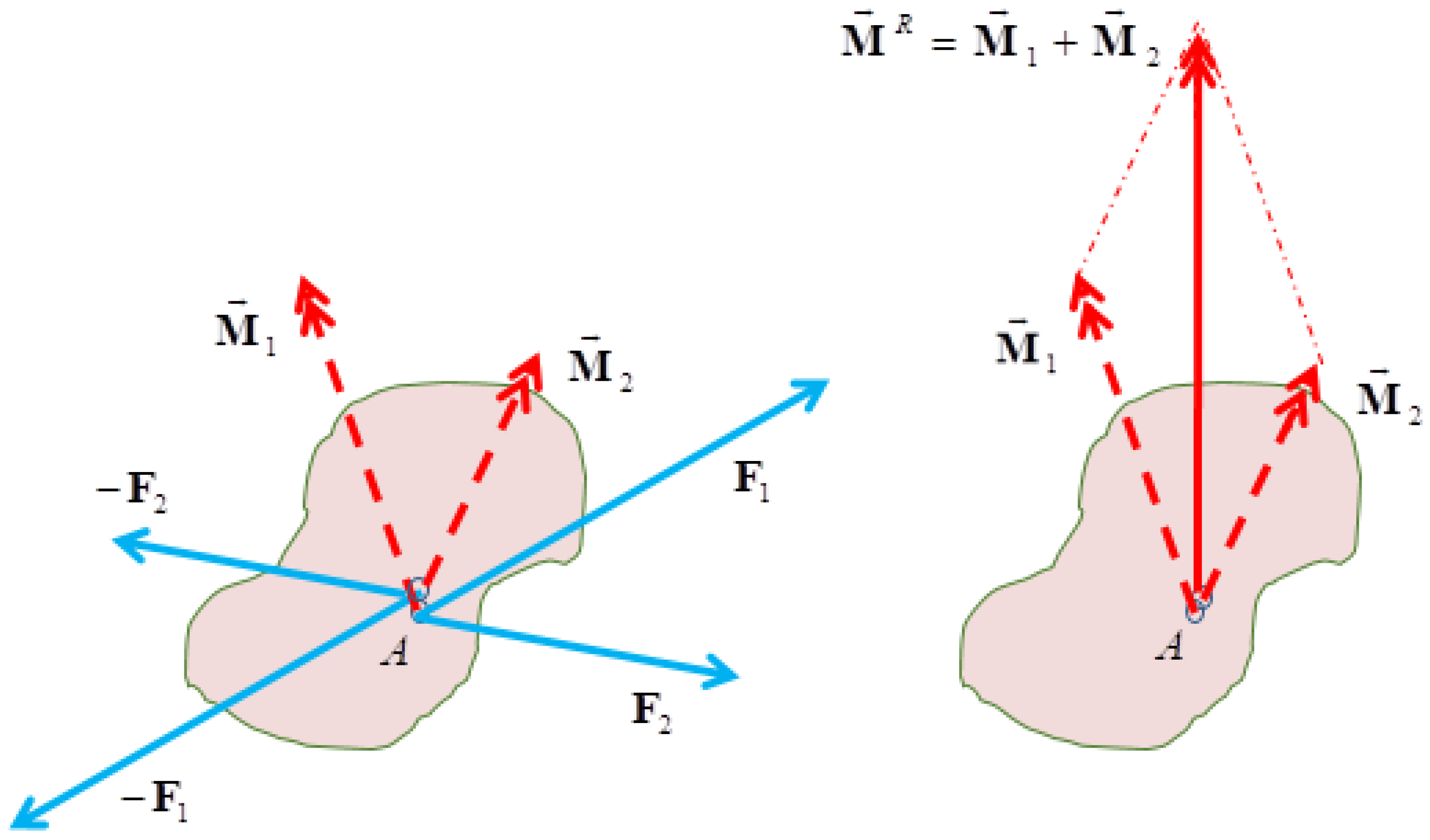
Furthermore, the effect of a system of concentrated couples applied at point
A cannot be replaced by a single resultant couple. For example, two concentrated couples with couple moments
and
acting at a point cannot be generally replaced with a couple with resultant moment couple
in
Figure 7. This means that the parallelogram law for the addition of the moment of concentrated couples is not generally valid for concentrated couples. Interestingly, the resultant of concentrated couples with moments
and
represents a concentrated quadrupole, not a concentrated couple (or dipole).
It is only when the concentrated forces of couples act on the same points A and B before limiting process that the parallelogram law can be used for forces and couple moments. As a result, the system of two couples and can be replaced by a resultant couple moment of . However, the moments , , and cannot completely describe the effect of these couples. Interestingly, the inverse is true, that is, a given concentrated couple with moment at point A can be decomposed to some components by using the parallelogram law if the corresponding forces follow the parallelogram law.
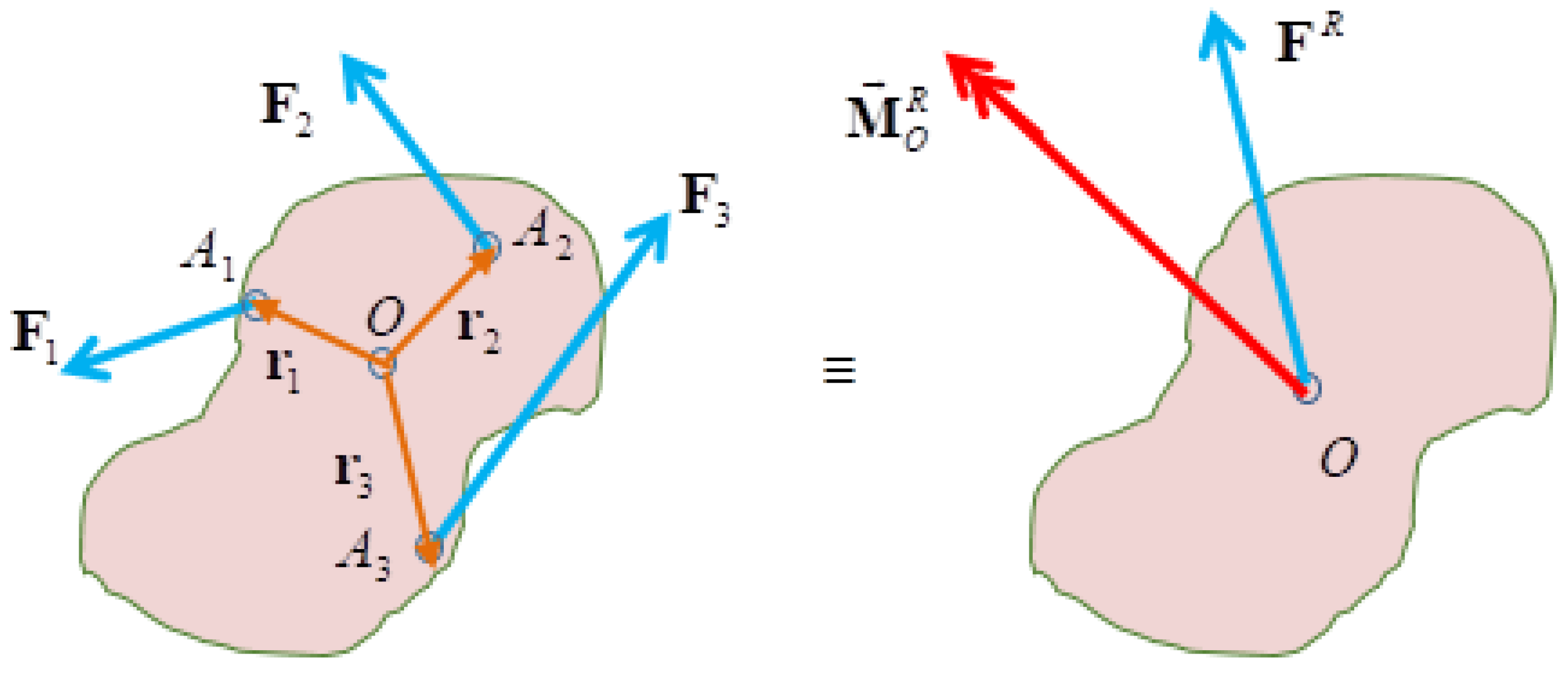
3.3. System of Forces Equipollent to a System of One Force and One Couple
The introduction of a couple shows that a system of forces acting on a body is equipollent to a system of one resultant force
and one resultant couple with moment
at point
O [
42], where
Figure 8 shows that the reduction of the system of forces
,
, and
acting on a body has been replaced with an equipollent system of one resultant force
and one resultant couple with moment
at point
O.
However, the effect of this new simple equipollent system is not generally equivalent to the original system of forces because it creates a different state of stress and deformation. As discussed previously, equipollent systems have different effects on the internal interactions and deformation of the body.
Despite this character, the concept of an equipollent system of one resultant force and one resultant couple with moment still plays an important role in mechanics. For example, for investigating the condition of equilibrium or motion of rigid bodies or for determining the deformation of beams, plates, and shells in the structural mechanics and elementary strength of materials, the reduction of forces to an equipollent system of one force and one couple is very useful. This will be discussed in the following sections.
3.4. Equipollent System of Forces in Rigid Body Mechanics
The motion of a rigid body is specified by the motion of one point describing its translation and rotation about this point. Interestingly, the force and moment governing equations
are enough to describe the motion of a rigid body [
41,
42,
43], where each scalar equation of (27) and (28) describes the motion corresponding to a degree of freedom of the rigid body. Consequently, an equipollent system of external forces creates the same condition of equilibrium or motion for a rigid body. This means that although the internal forces might not remain the same, the motion of individual particles remain the same. Therefore, in rigid body mechanics, systems of equipollent forces are considered equivalent.
Note, however, that the effective forces
and
are usually simplified for a rigid body by introducing the center of mass and the moment of inertia tensor [
41,
42,
43].
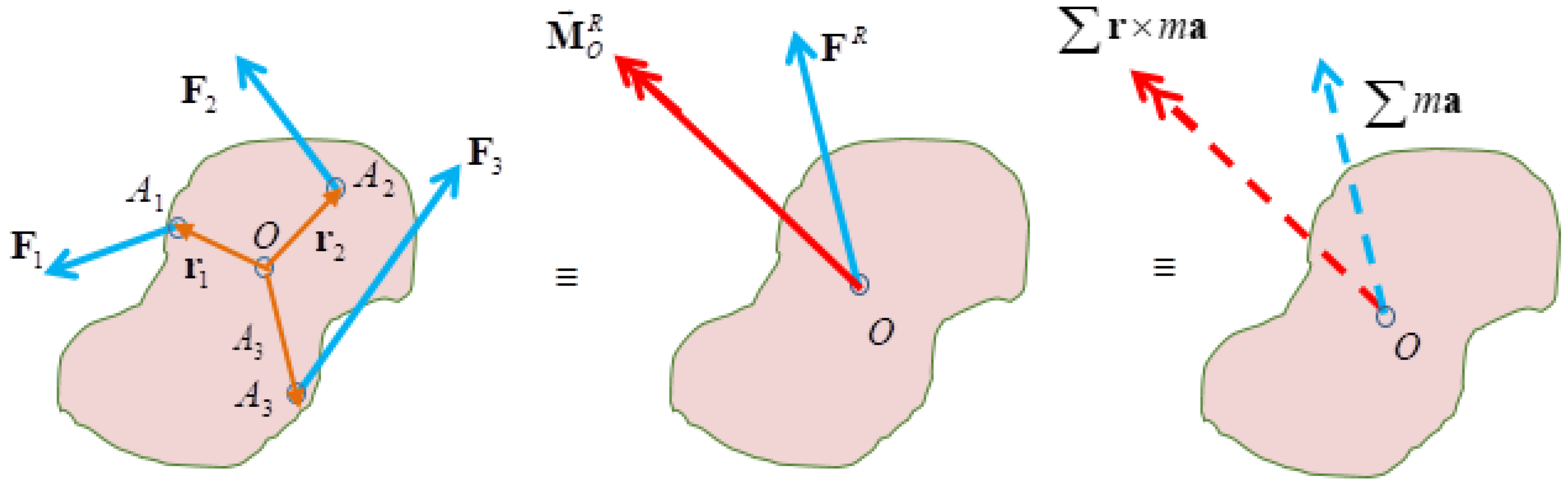
Figure 9 shows that the reduction of the system of forces
,
, and
acting on a rigid body has been replaced with an equivalent (equipollent) system of one resultant force
and one resultant couple
at point
O, which in turn is equivalent to a system of effective force
and couple with moment
.
Interestingly, in the mechanics of rigid bodies, very important results are obtained as follows.
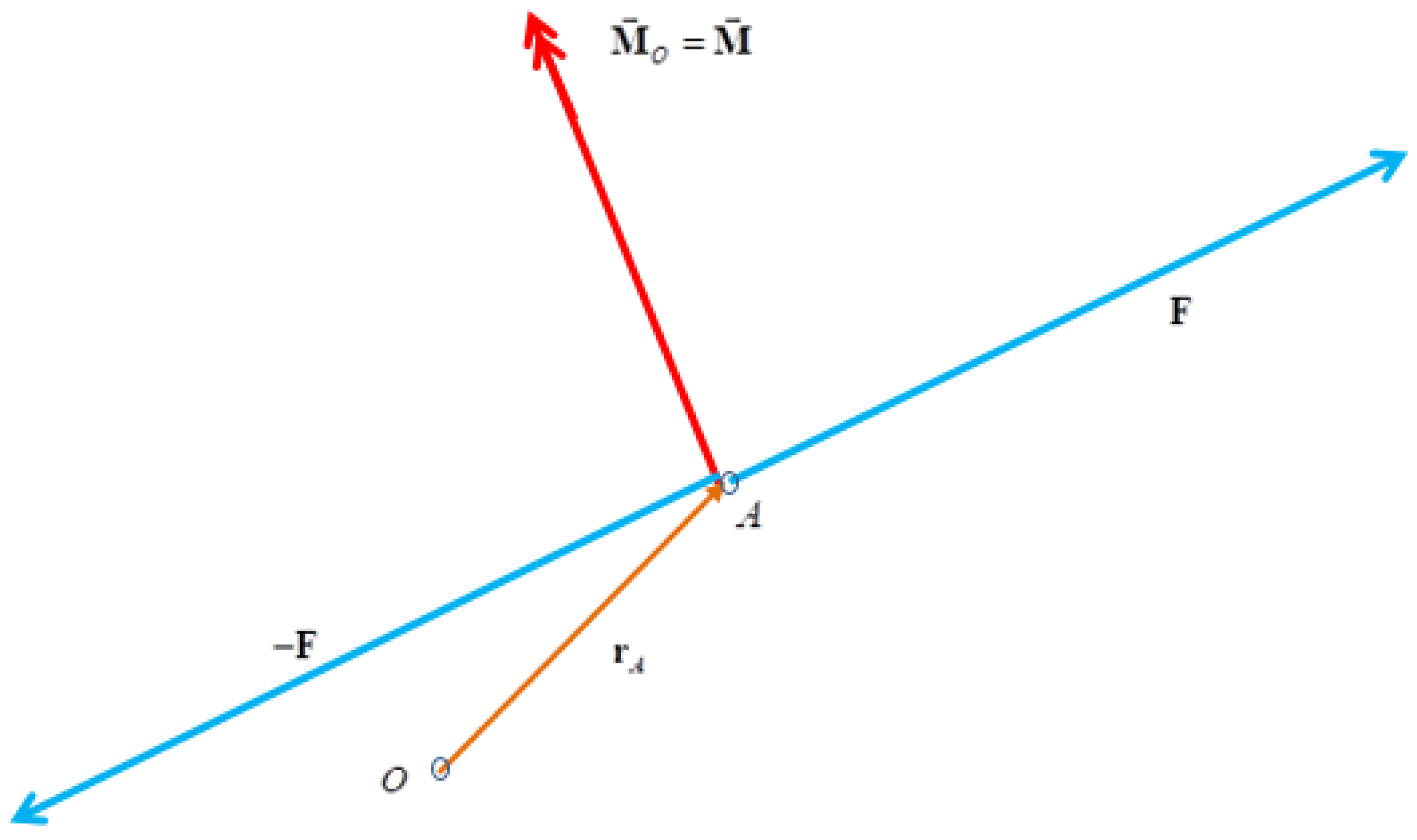
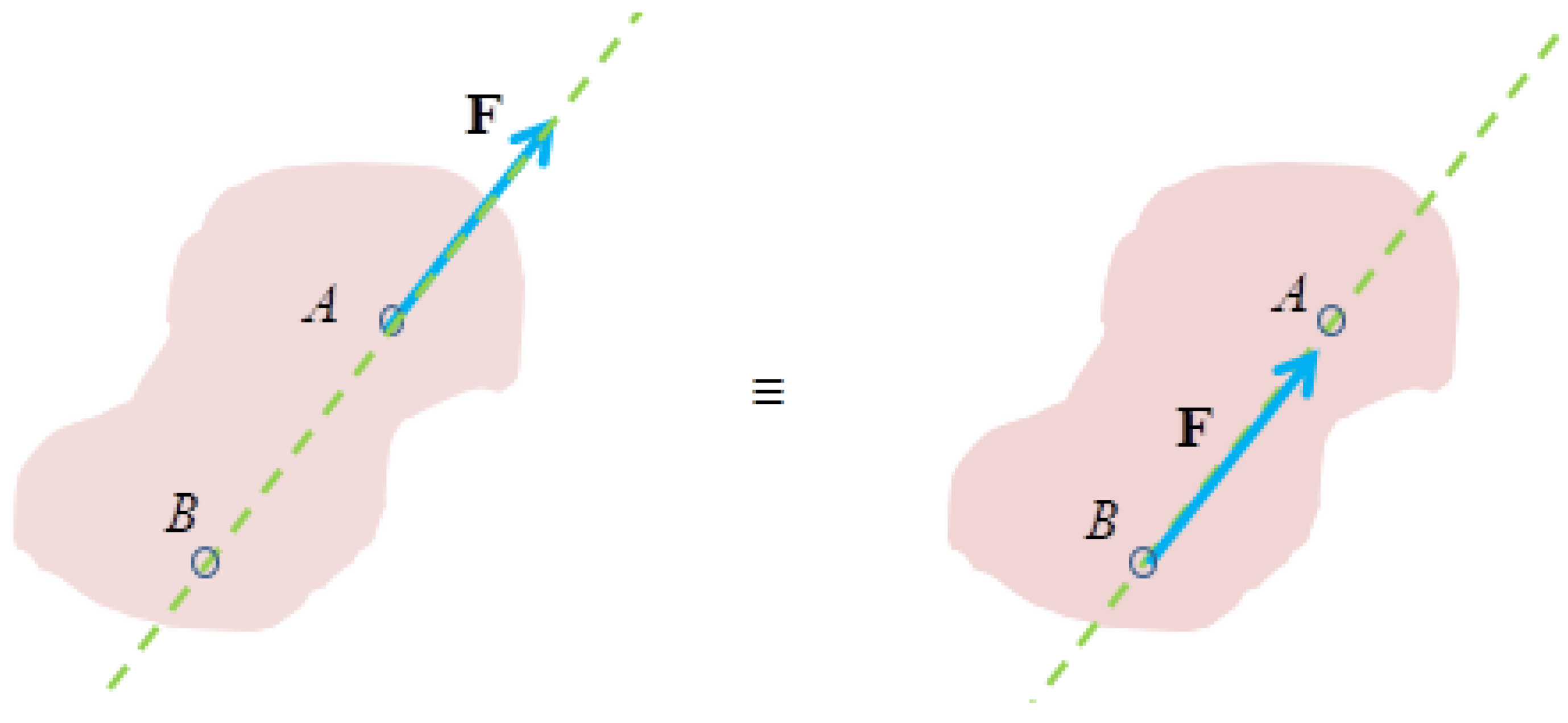
3.4.1. Sliding Force (Transmissibility Principle)
By sliding an external force vector
along its line of action, the state of equilibrium or motion of a rigid body does not change. In other words, in rigid body mechanics, the forces with the same magnitude and line of action are not only equipollent but also equivalent. This is called the principle of transmissibility for rigid bodies, which states that the action of a force
on a rigid body may be transmitted along its line of action, as shown in
Figure 10.
However, the transmissibility principle is not valid when considering the state of internal stresses and deformation, where forces are concentrated and cannot be transmitted on their line of action.
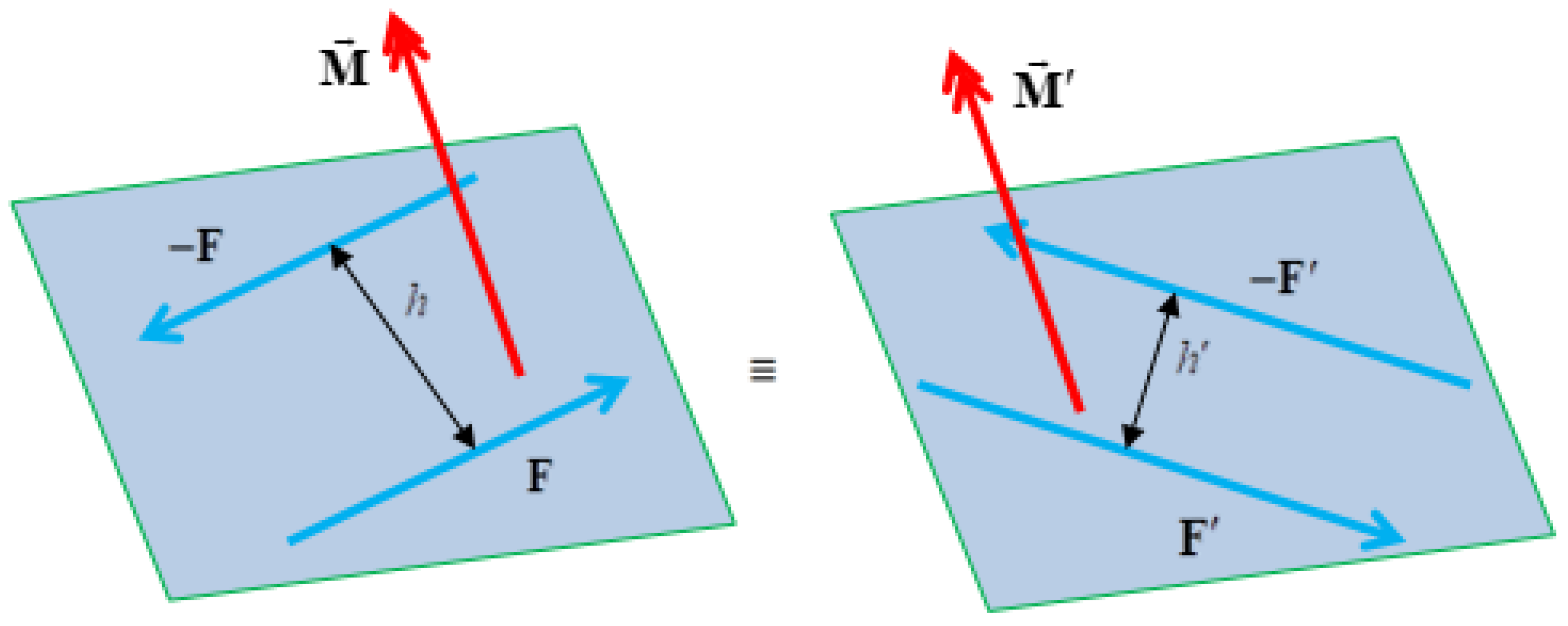
3.4.2. Freedom of Couples
Note that replacing a couple with an equipollent couple does not change the state of equilibrium or motion of a rigid body. This means in rigid body mechanics, equipollent couples are equivalent [
42,
43]. For example, the couple of forces
and
can be replaced by the equipollent couple of forces
and
, as shown in
Figure 11. As a result, in rigid body mechanics, two couples are equivalent if they have the same moment
, regardless of whether they act in the same plane or in parallel planes [
42,
43].
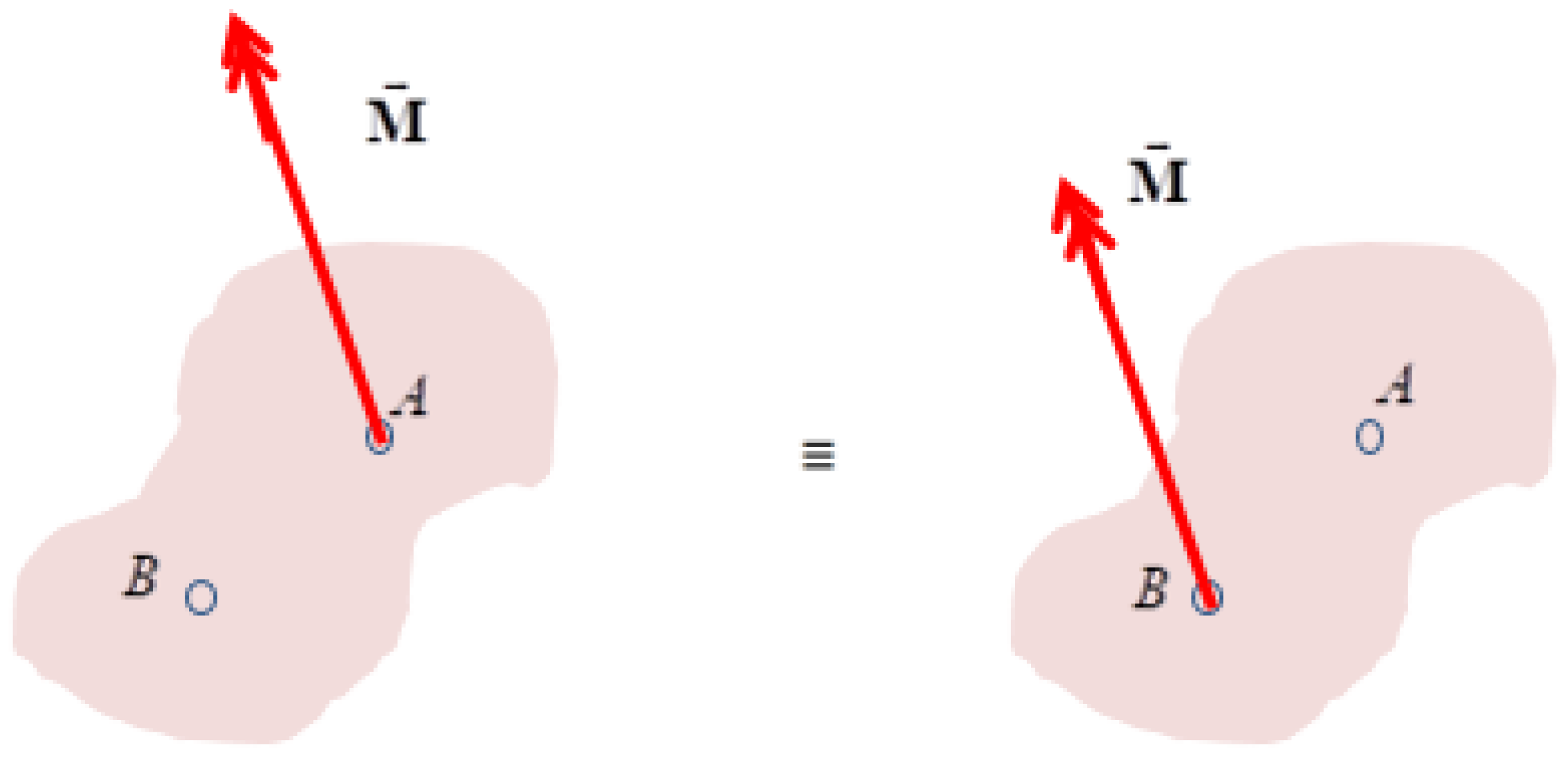
Also, notice that the effect of two couples with moments and can be replaced by a couple with a moment equal to the sum . This result suggests that a couple can be completely represented by its moment in rigid body mechanics.
Accordingly, in rigid body mechanics, the effect of couple forces
and
can be completely represented by its pseudo-vector moment
applied to any arbitrary point. Therefore, the couple is usually denoted with its moment
instead of the term “couple with moment
”. Therefore, one can simply use “couple
”. Note that only for a rigid body can a couple be represented by its free moment vector
and be attributed to any arbitrary point without affecting the condition of equilibrium or motion of the rigid body, as shown in
Figure 12.
Couple freedom is not valid when considering the state of internal stresses and deformation. In this case, a couple cannot be completely represented by its moment.
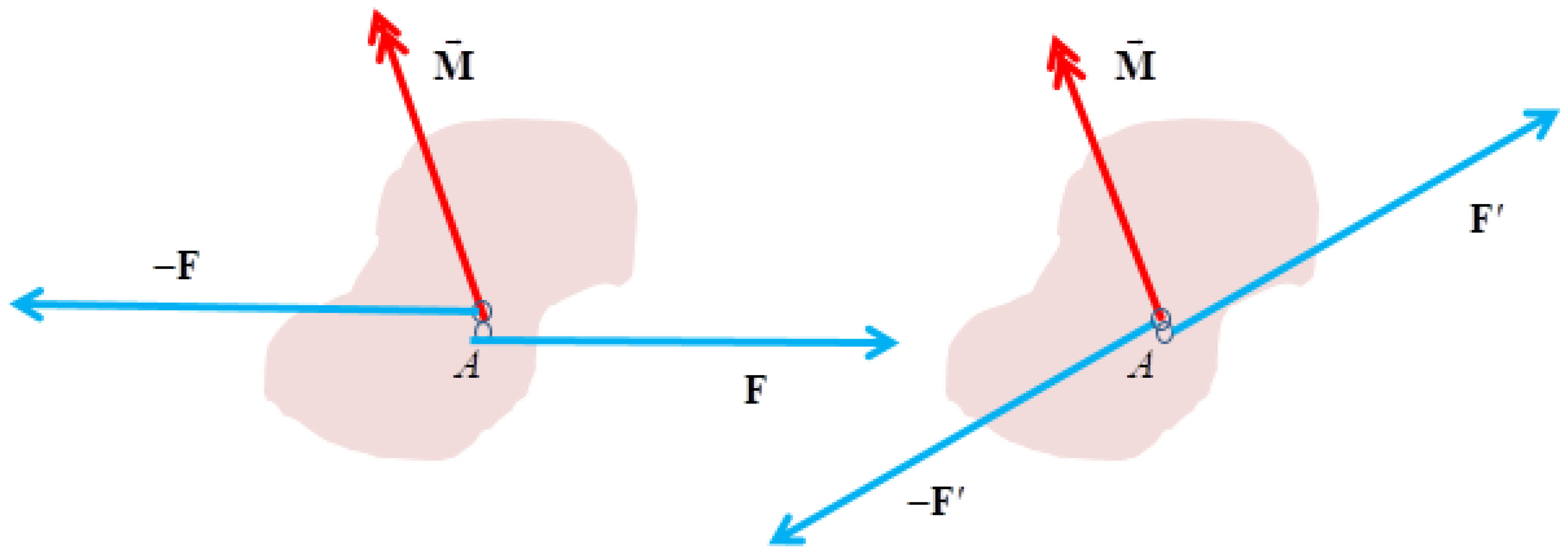
3.5. Equipollent System of Forces in Continuum Mechanics and the Strength of Material
In continuum mechanics, where the state of internal forces and deformation are studied, the equipollent systems of forces are not equivalent. This means the system of forces
,
, and
acting on a deformable body, shown in
Figure 9, cannot be replaced with an equipollent system of one resultant force
and one resultant couple
at point
O. Therefore, forces are not sliding (transmissible) vectors, and couples cannot be completely represented by their moments as free vectors. This is more essential for concentrated couples. There are infinite sets of concentrated couples at point
A with the same moment
.
Figure 13 shows two of these equipollent concentrated couples, one with concentrated forces
and
and the other with concentrated forces
and
. The deformation and state of stresses associated with these two equipollent concentrated couples are different.
Consequently, even a concentrated couple cannot be completely represented by its moment as a free vector. Unfortunately, representing a couple by its corresponding pseudo-vector moment has carelessly created some fundamental misunderstanding in the development of couple stress continuum mechanics. It seems this is the result of the confusion of continuum mechanics with the structural mechanics and strength of material, which is explained as follows.
Although equipollent systems of forces are not equivalent, it turns out that the state of stresses and deformation are approximately the same for some elastostatic cases. This is the result of Saint-Venant’s principle in elastostatics, which states that the deformation and state of stresses for static equipollent system of forces are approximately the same for parts of continuum far away from loading points. Saint-Venant’s principle allows us to replace boundary loadings by an equipollent system of forces to find analytical solutions far away from loadings. This principle is generally used in the semi-inverse method to solve elasticity problems, such as extension, pure bending, torsion and flexure of elastic bars (Sadd, [
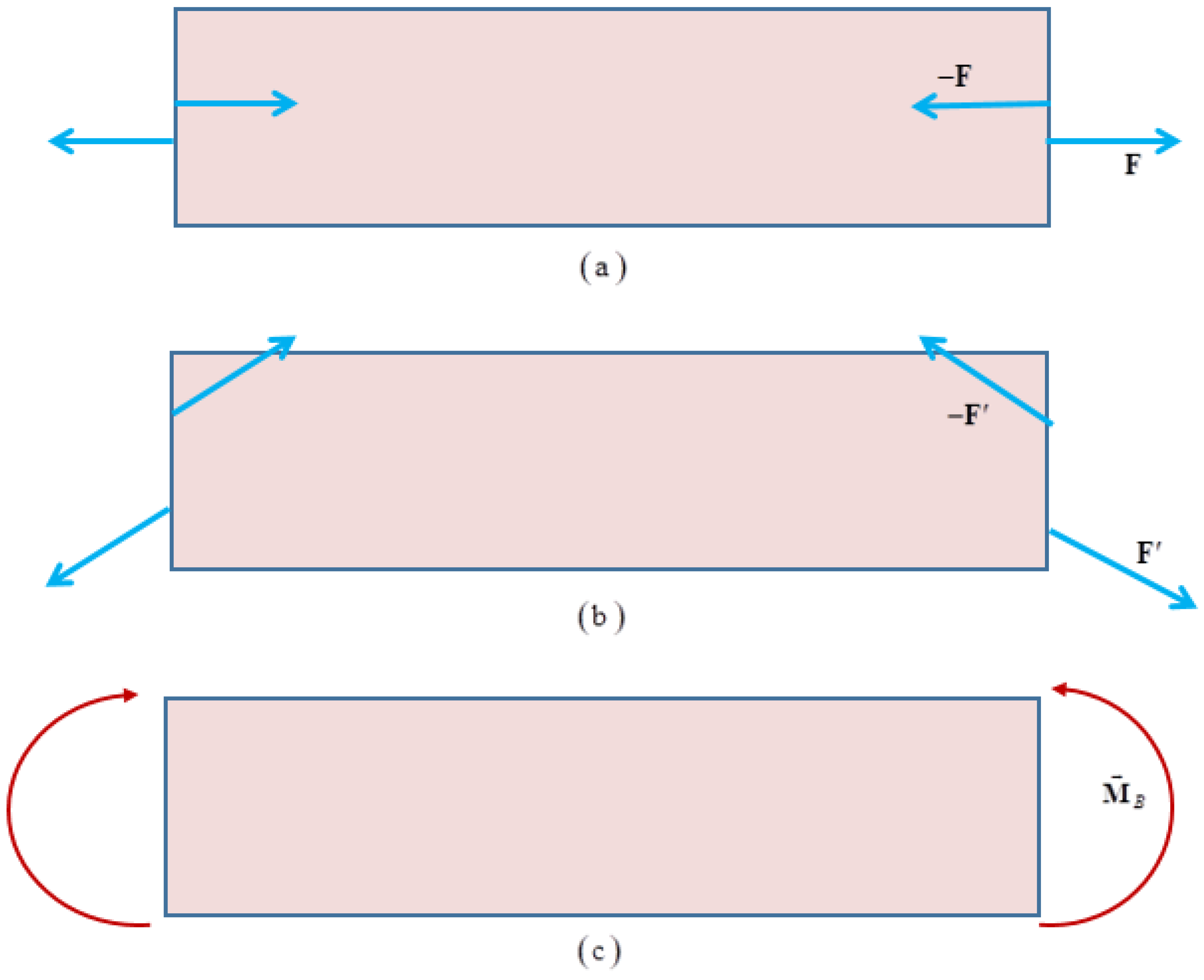
45]). It turns out that Saint-Venant’s principle is an important part of the strength of materials, such as beam, plate, and shell bending, where the loading on boundary cross-sections is replaced by the equipollent loading that the far-field deformation predicts. For example, the equipollent couples (
,
) and (
,
) on the end cross-sections of the beam create almost the same deformation and stresses far away from these ends. Therefore, their loadings are represented by their moment
at the ends of the beam, as shown in
Figure 14.
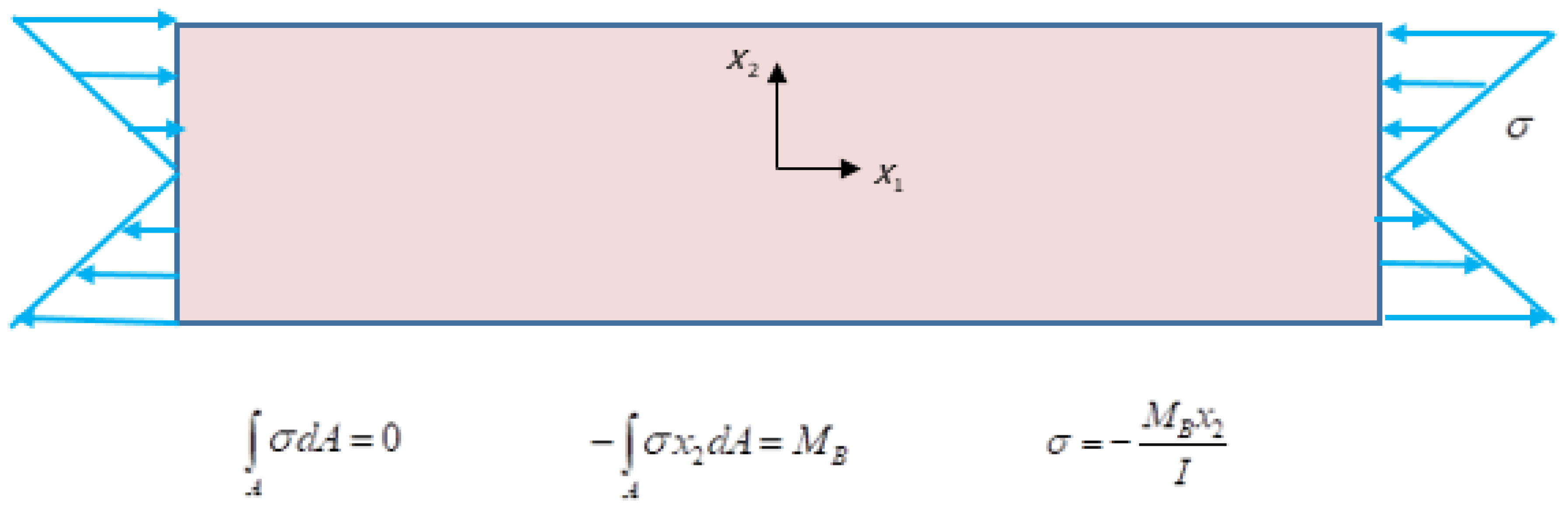
In the elementary strength of materials, the couple
is replaced with the triangular normal force stress distribution predicted by beam theory, as shown in
Figure 15. Based on Saint-Venant’s principle, the deflection and stresses from beam and plate theories are accurate enough when they are far away from the loaded regions. However, at the vicinity of loading regions, such as those shown in
Figure 14, these elementary strength of materials results are not accurate and can even be misleading. Importantly, this fundamental fact must be considered in the development of couple stress continuum mechanics.
6. Fundamental Character of Body Couple, Couple Traction, and Couple Stresses in Continuum
Now the consistent form of body couple, couple traction, and couple stress based on the determinacy of interactions in the continuum is established, such that their effect is completely described by their moments , , and , respectively, without requiring the specification of the line of action of their constituent opposite parallel couple forces.
6.1. Body Couple Distribution Does Not Exist in Continuum Mechanics
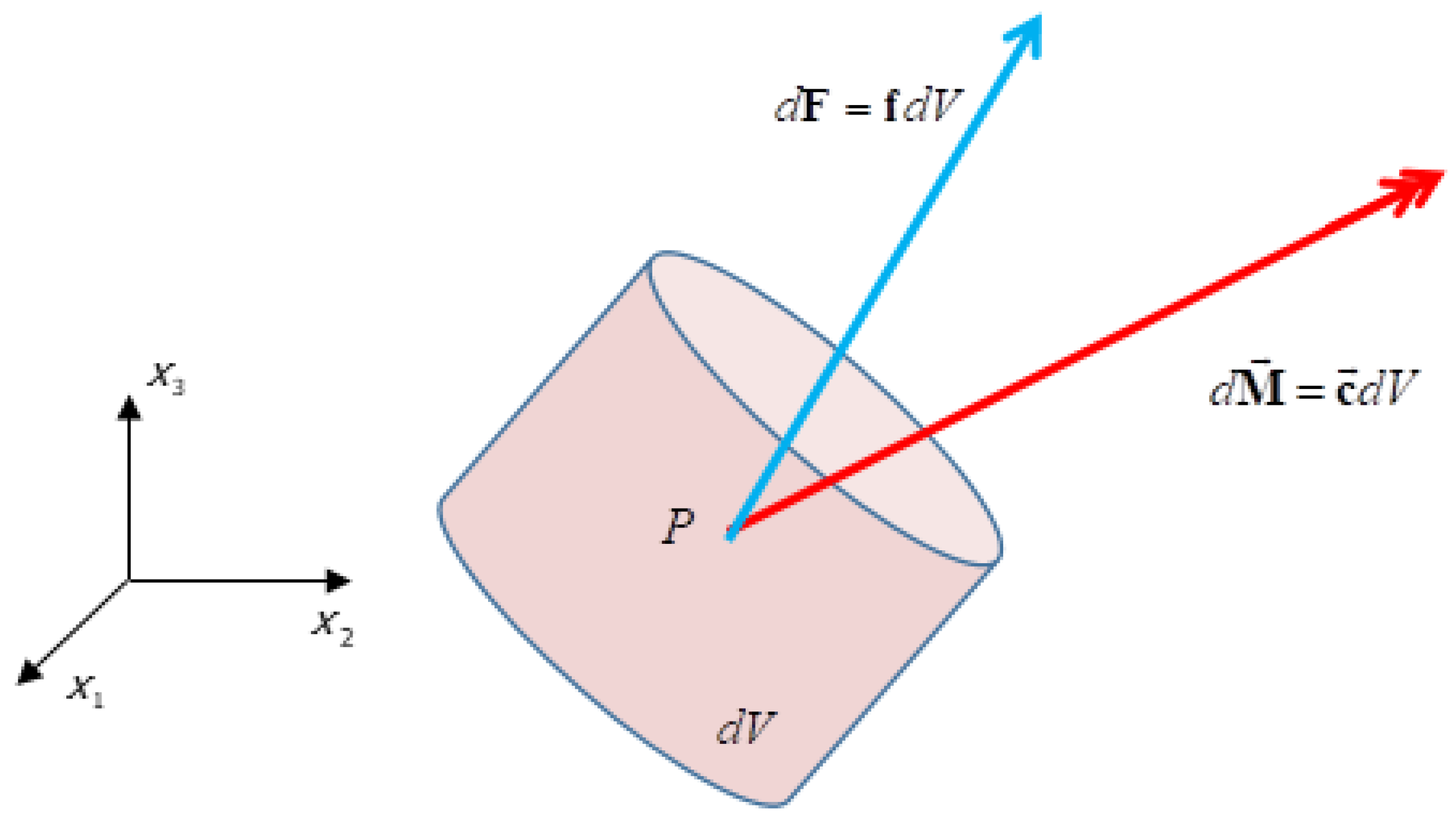
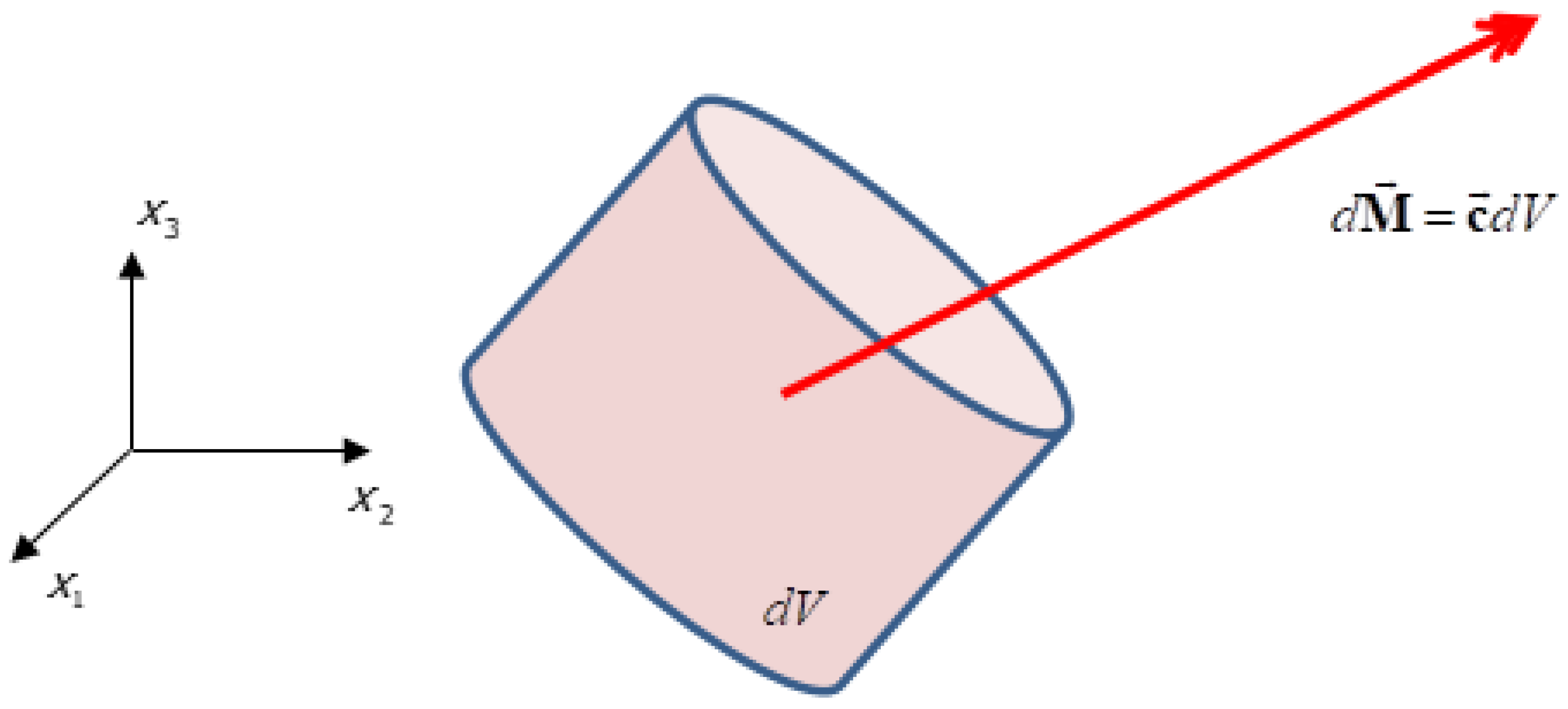
Note that the pseudo-vector moment
does not completely describe the effect of an external body couple in the volume
(
Figure 24).
One needs to know the line of action of couple forces
and
creating this couple. However, the system of couple forces
and
is not unique. The couple can be represented by forces
and
in
in an infinite number of ways, where
. Here,
is the relative perpendicular distance between the line of action of forces
and
. For example, this system of couple tangential forces
and
can be arbitrarily chosen as either of the systems in
Figure 25. However, these system of equipollent couples create different states of stresses and deformation. Therefore, the couple with moment
can never be completely represented by its moment. This contradicts the uniqueness of interactions in the continuum. This contradiction indicates that the volume couple with moment
cannot exist, which results in
. Therefore, a body couple distribution does not exist in continuum mechanics.
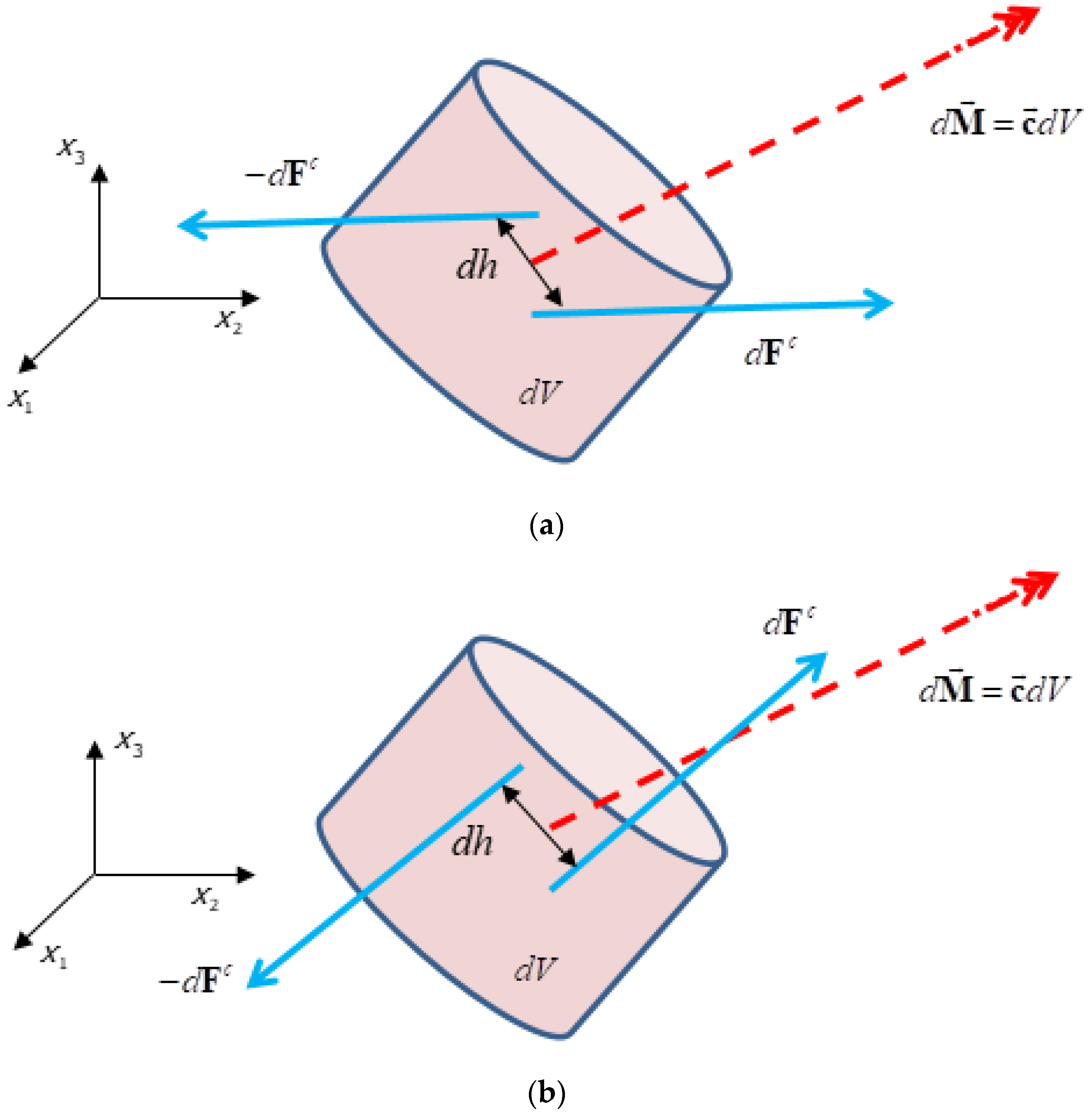
Interestingly, the distributed volume couples have been observed in liquid crystals and magnetic fluids. Therefore, one might claim the possibility of a distribution of body couples with a specified piecewise continuous distribution of external couple forces
and
creating the moment
in the volume
. However, by using the reduction method, it can be always shown that this body couple can be replaced with an equivalent body force and a surface force traction. This means the supposed body couple distribution with moment density
is not distinguishable from a body force
in continuum mechanics, and its effect is simply equivalent to a system of body force and surface force traction. Interestingly, the volume polarization density and volume magnetization density distributions in electrodynamics have some similarity to a body couple. It should be noted that these vector densities are also transformed to a volume charge density and surface charge density for electric polarization and a volume current density and surface current density for magnetization, respectively (Griffiths [
47]).
6.2. Fundamental Character of the Couple Traction
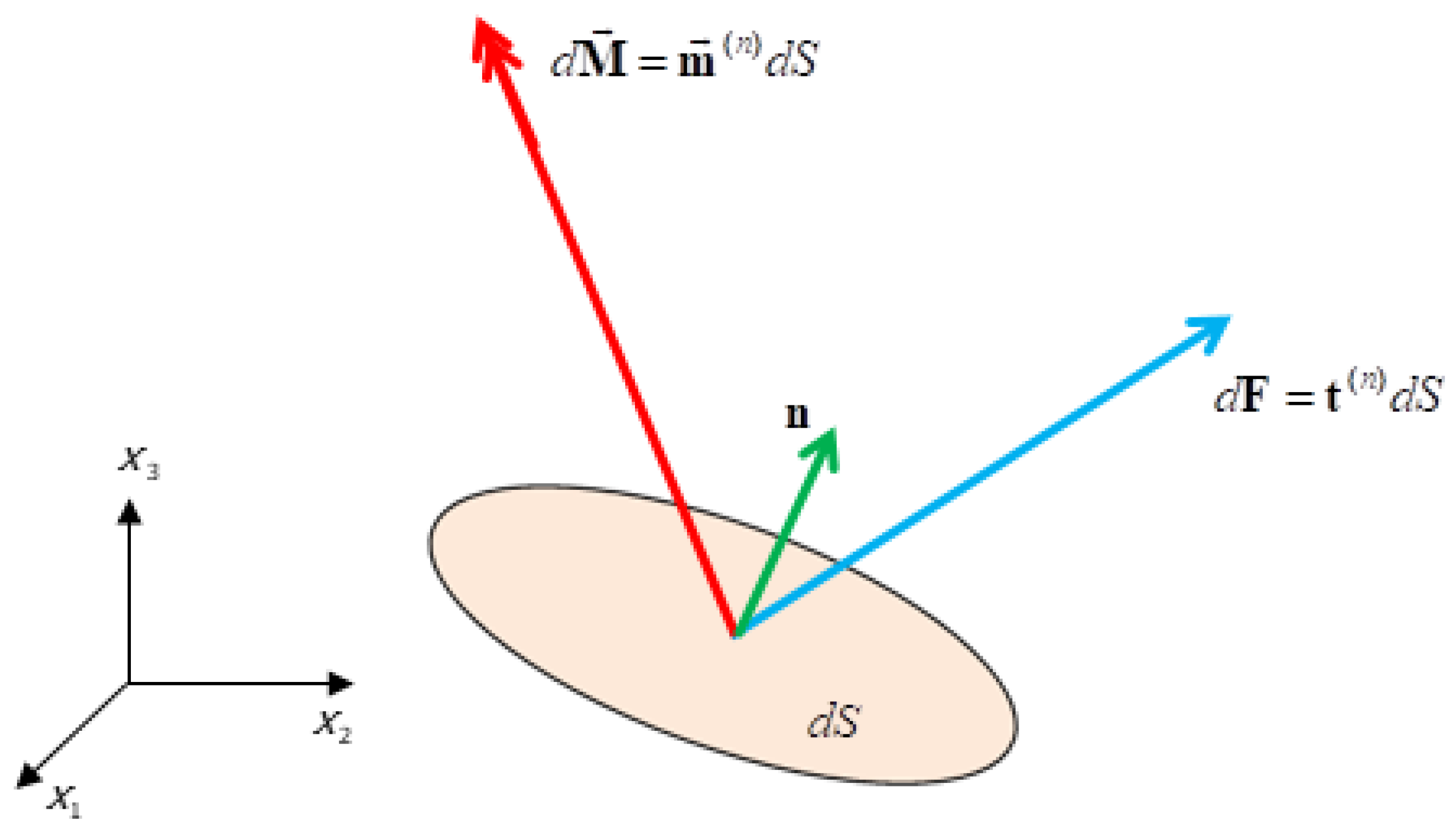
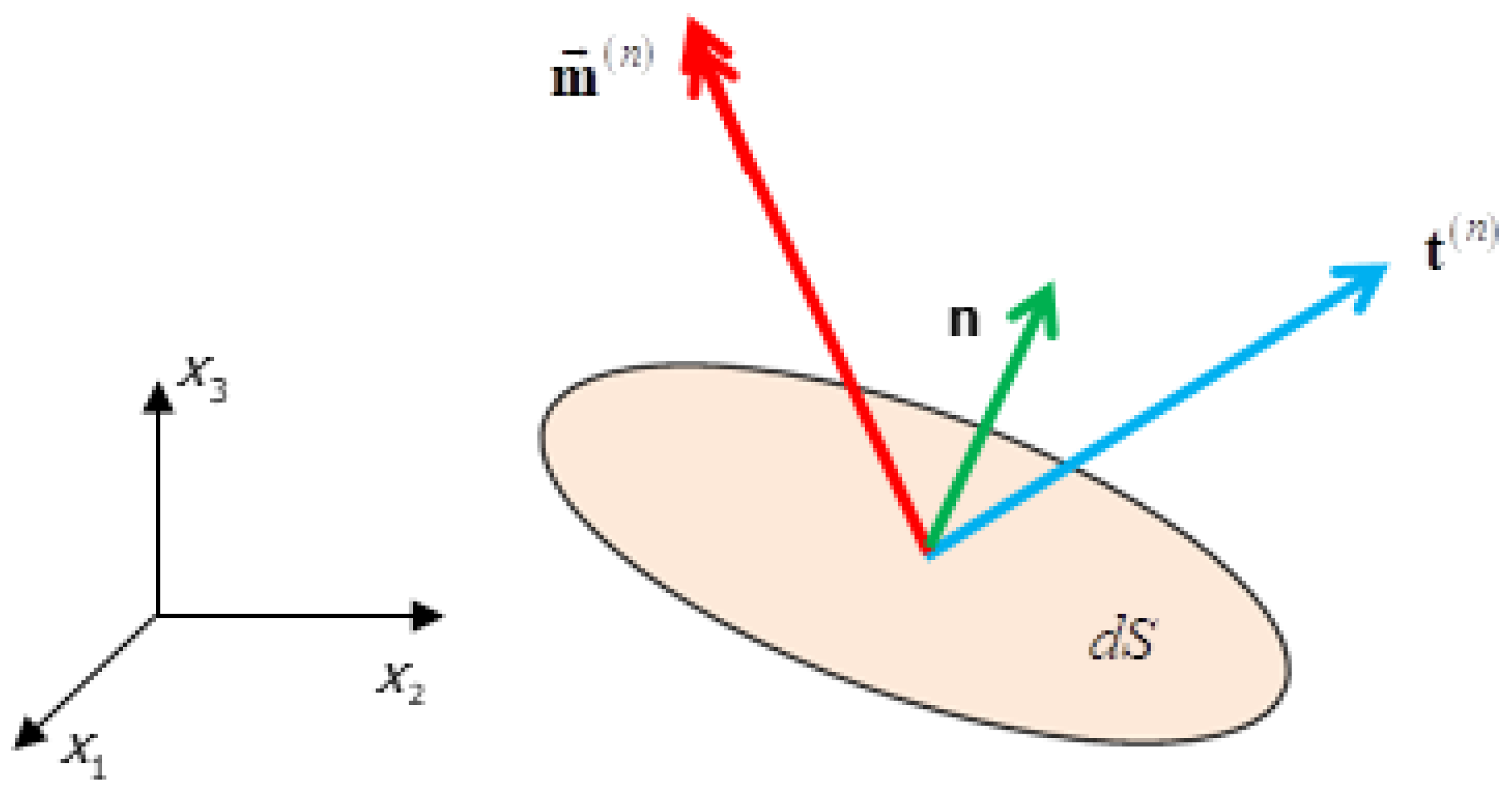
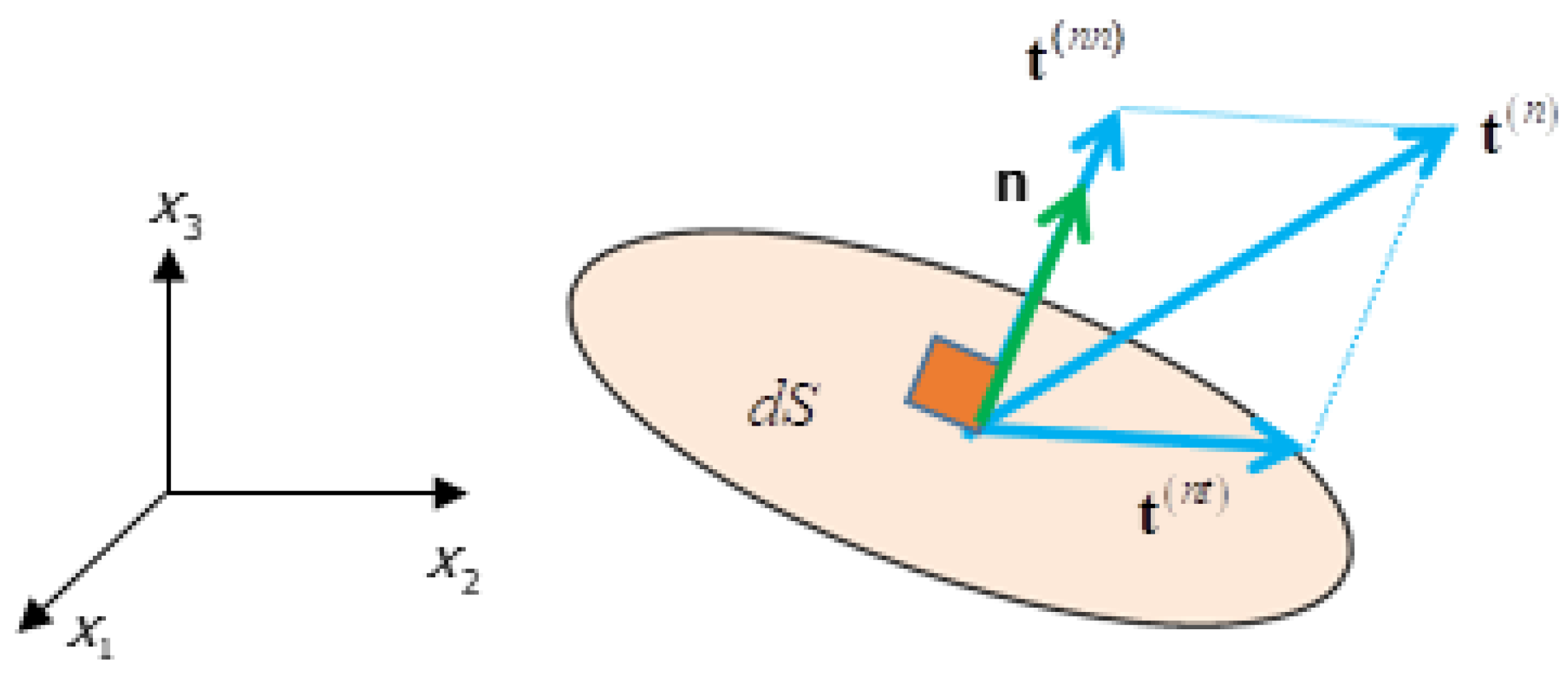
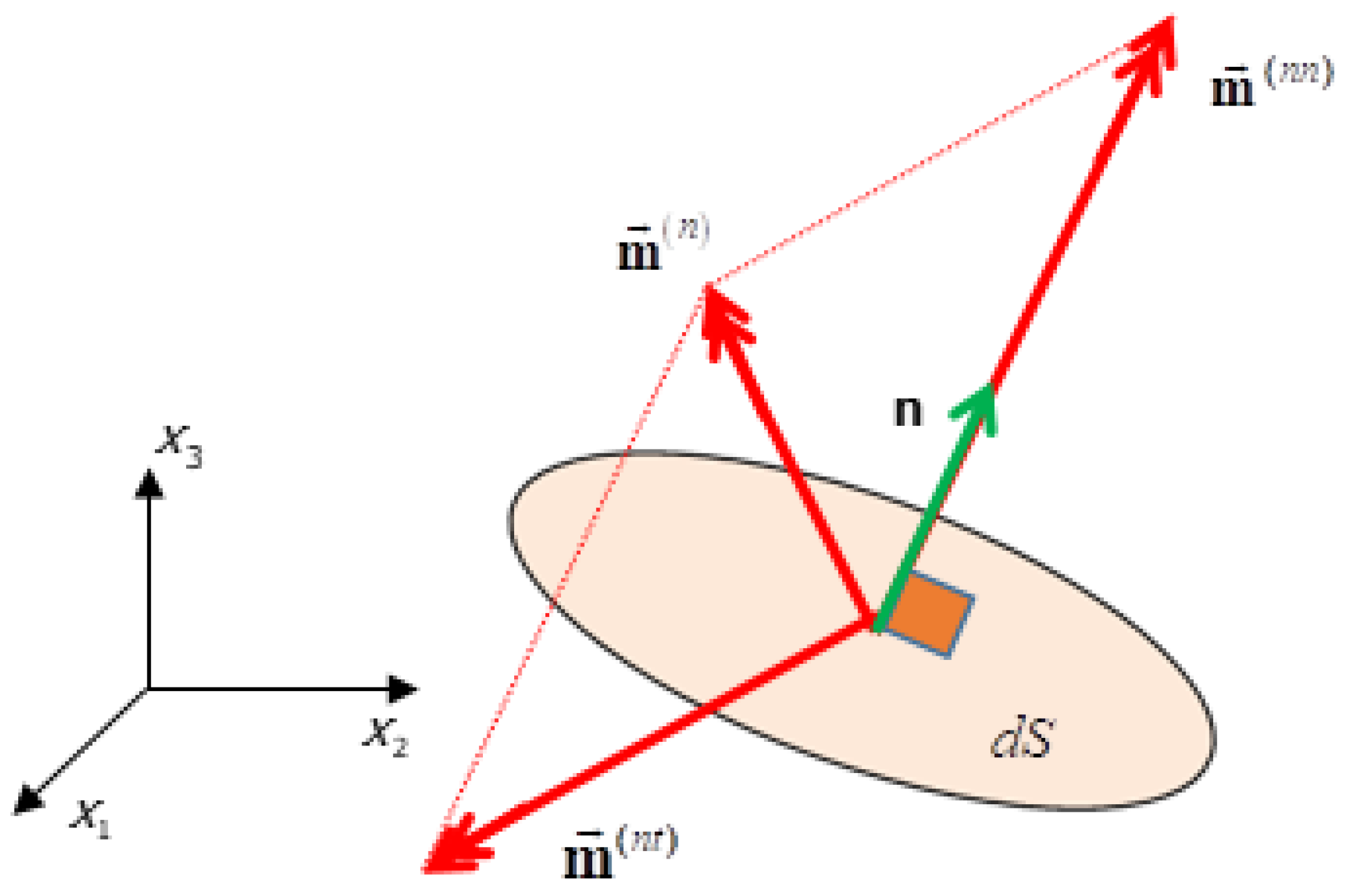
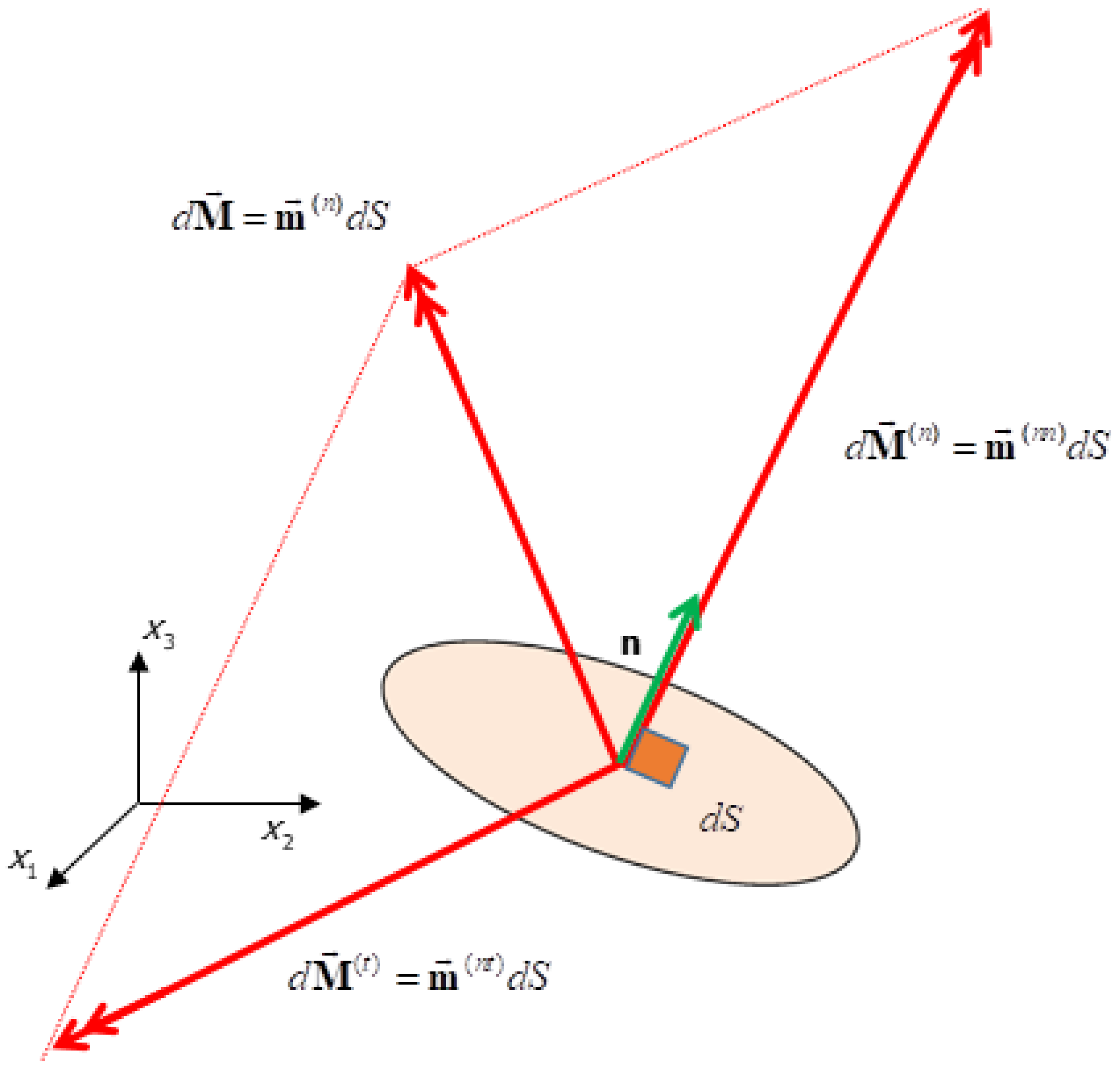
Based on the uniqueness of interactions in the continuum, the couple traction with moment must be in such a form that its effect on a surface element of any arbitrary surface is completely described by its pseudo-vector moment . Interestingly, this requirement does not impose the condition inside the body. Instead, it imposes some restriction on the form of couple traction and its moment as follows.
For more insight, let us decompose the moment vector
into its normal and tangential components on the surface element
as
where
These components have been shown in
Figure 26.
Note that the normal moment is the moment of the couple component that causes twisting or torsion on the surface element , whereas the tangential moment is the moment of the couple component that causes bending.
It also seems instructive if the distribution of the tangential shear force traction vector is considered as a single layer. This is the vectorial analogy to a single layer of electric charge in electrostatics.
Next, the character of normal and tangential couple traction components with moments and , respectively, are investigated.
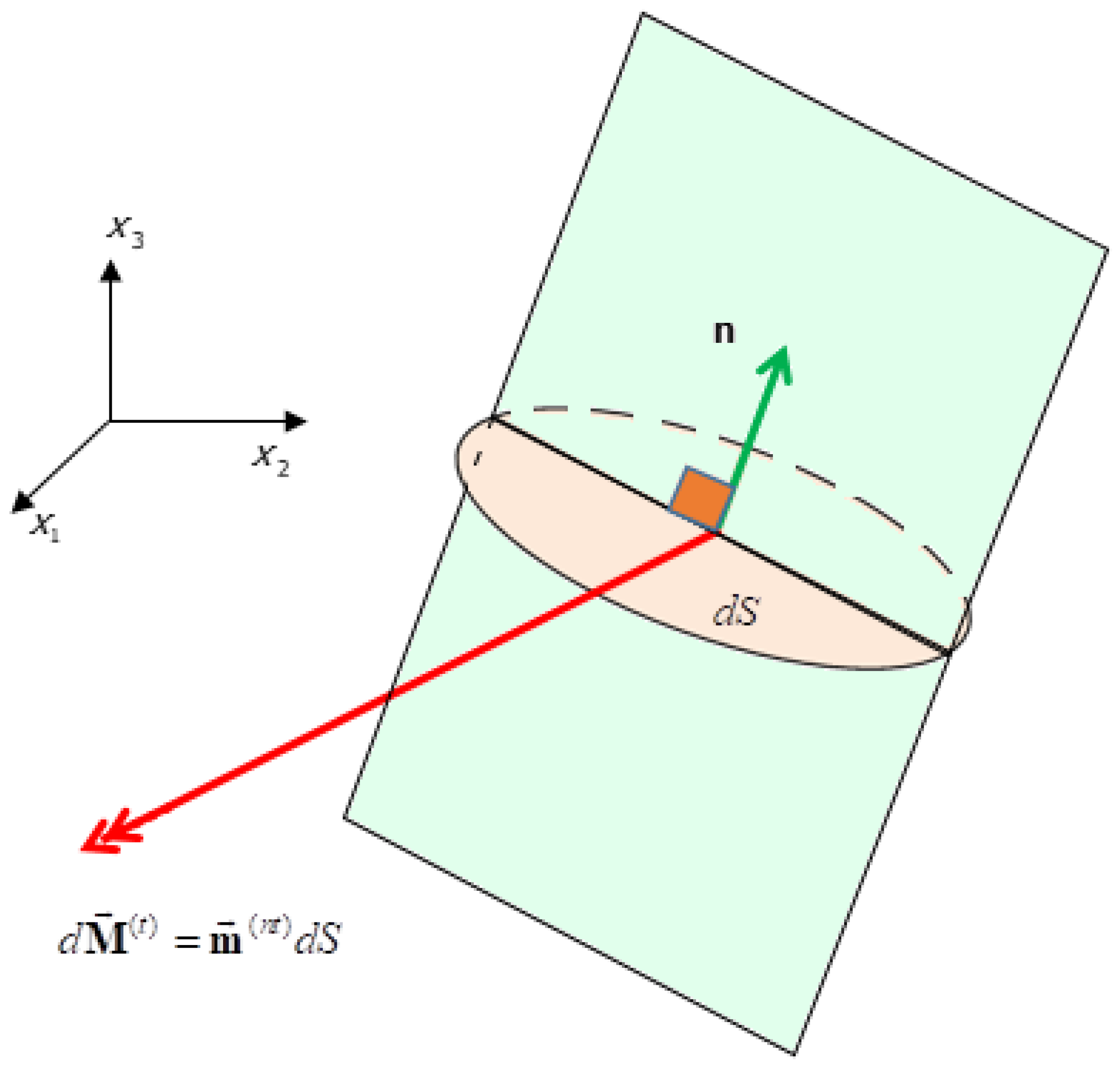
6.2.1. Twisting Couple Traction Does Not Exist in Continuum Mechanics
The possible surface twisting couple traction with normal moment
, as shown in
Figure 27, creates torsion on the surface element
.
Theorem 1. A twisting couple traction with a normal moment vanishes on any surface in the continuum; that is, .
Proof. If the surface twisting couple with moment
exists on the surface element
of any surface
, it represents a system of couple tangential forces
and
on the surface creating twisting. However, this system of couple tangential forces
and
is not unique for a given
. Note that the twisting couple with moment
can be represented by tangential forces
and
on
in infinite number of ways. For example, this system of couple tangential forces
and
can be arbitrarily chosen as either of the equipollent systems in
Figure 28. Therefore, the normal couple with moment
cannot be completely represented by its moment
. This contradicts the uniqueness of interactions in the continuum where the effect of a normal couple can be completely represented by its moment
. This contradiction shows that the surface normal twisting couple with moment
cannot exist in a continuum, which results in
. This means that a continuum does not support a normal twisting couple traction on any surface. □
Although it has been rigorously established that a twisting couple traction does not exist on any surface in continuum mechanics, one might claim the possibility of a distribution of twisting couple traction with a specified piecewise continuous distribution of external couple forces
and
creating the normal moment
on the surface element
of the physical bounding surface
. It can be shown that this twisting surface couple traction always can be replaced with an equivalent shear force and some line force on the physical surface [
6]. Therefore, the possible distribution of normal twisting couple traction with moment
on the physical bounding surface
is not distinguishable from a shear force distribution in continuum mechanics. However, there is no need for such a replacement on an arbitrary surface
inside the bulk of the continuum, where
does not exist.
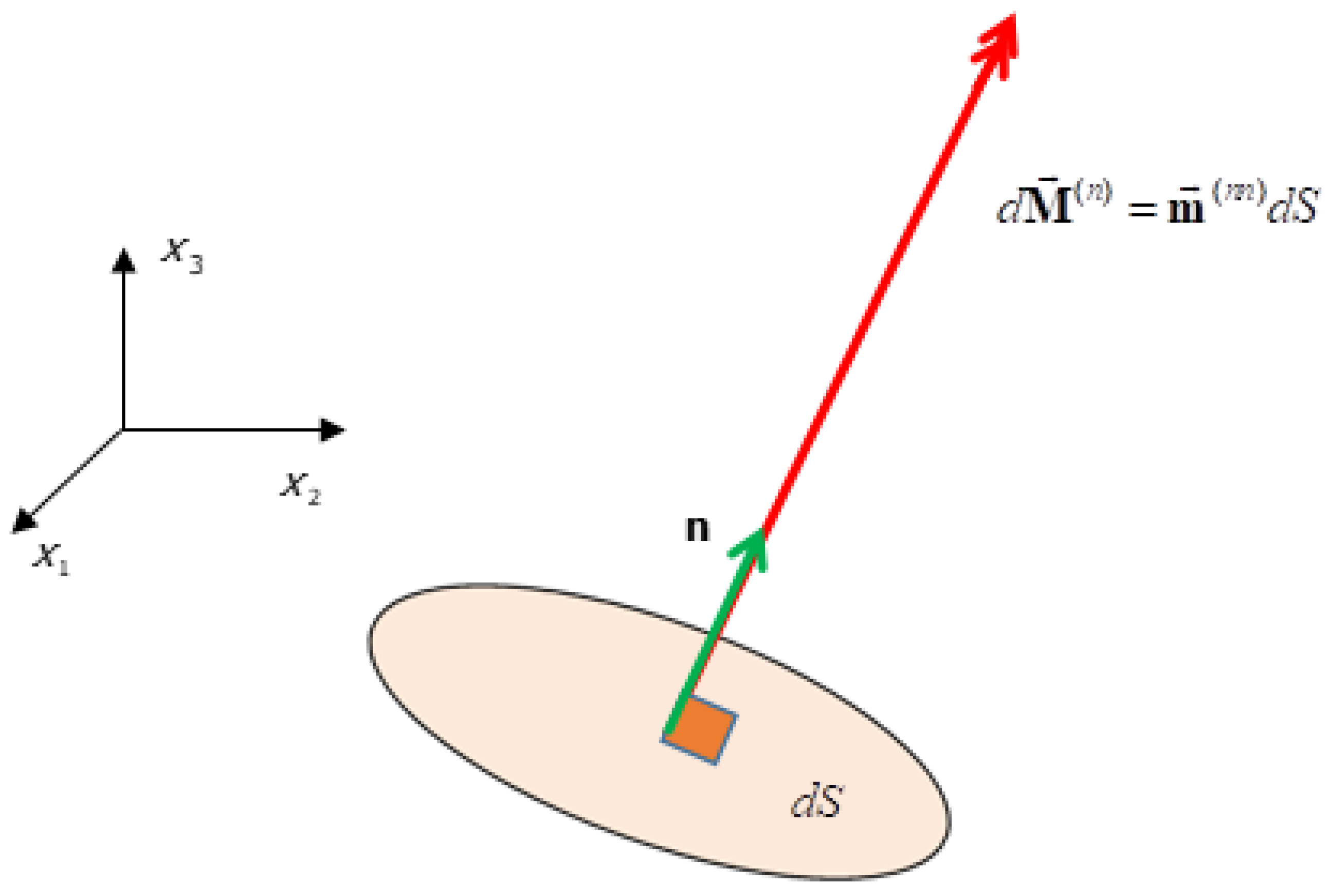
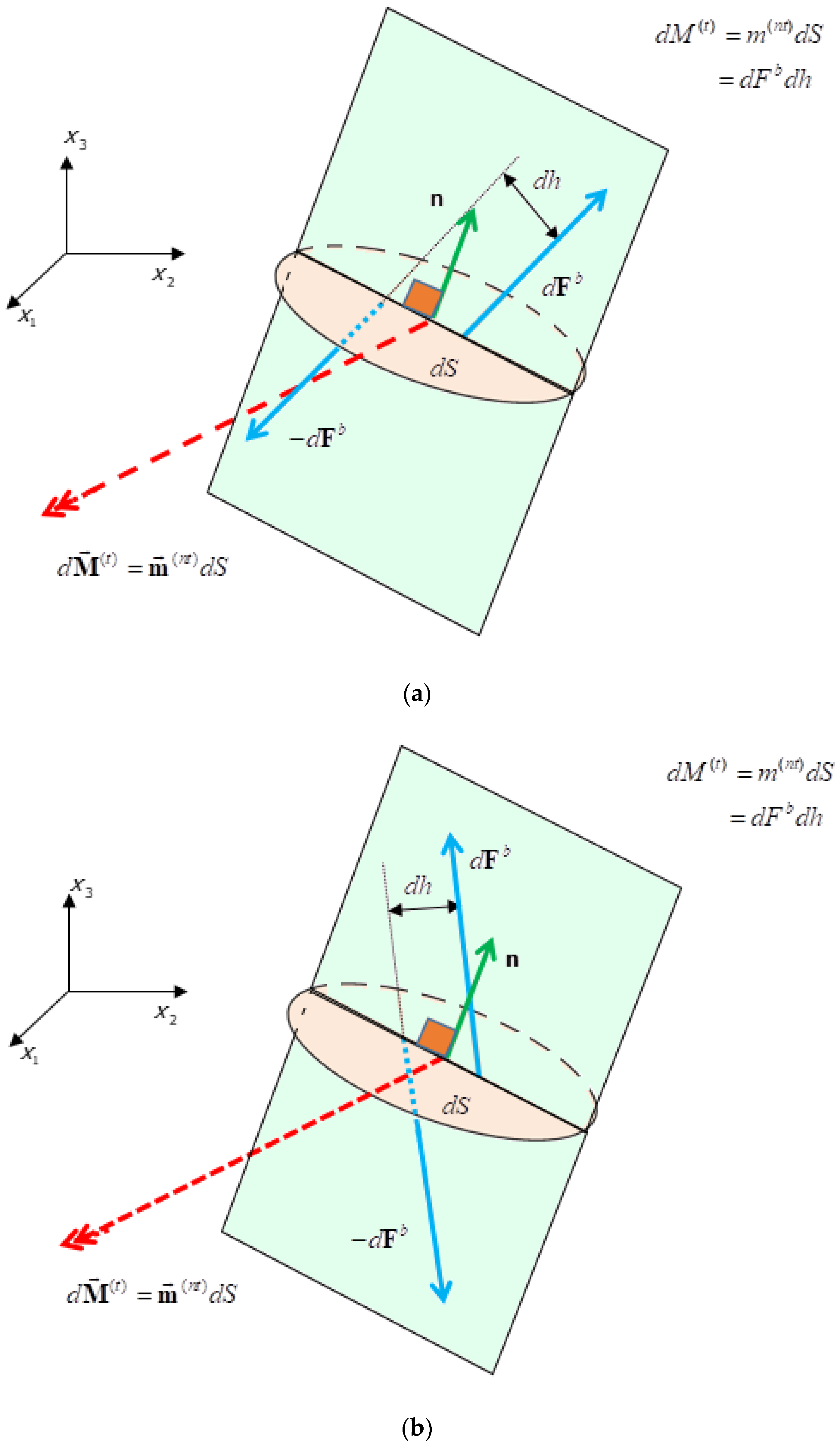
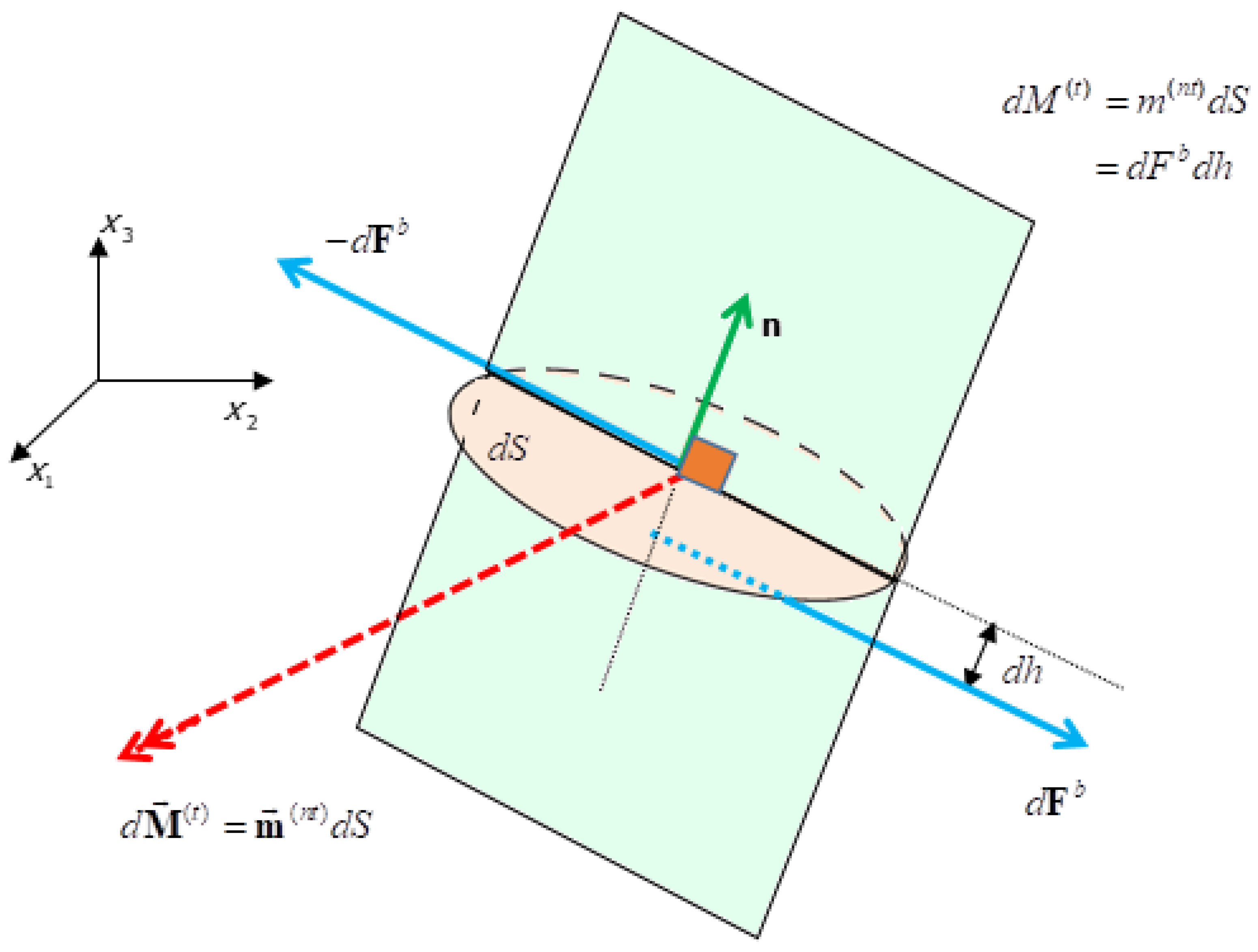
6.2.2. Bending Couple Traction Can Exist in Continuum Mechanics
The possible surface bending couple with tangential moment
, as shown in
Figure 29, creates bending on the surface element
.
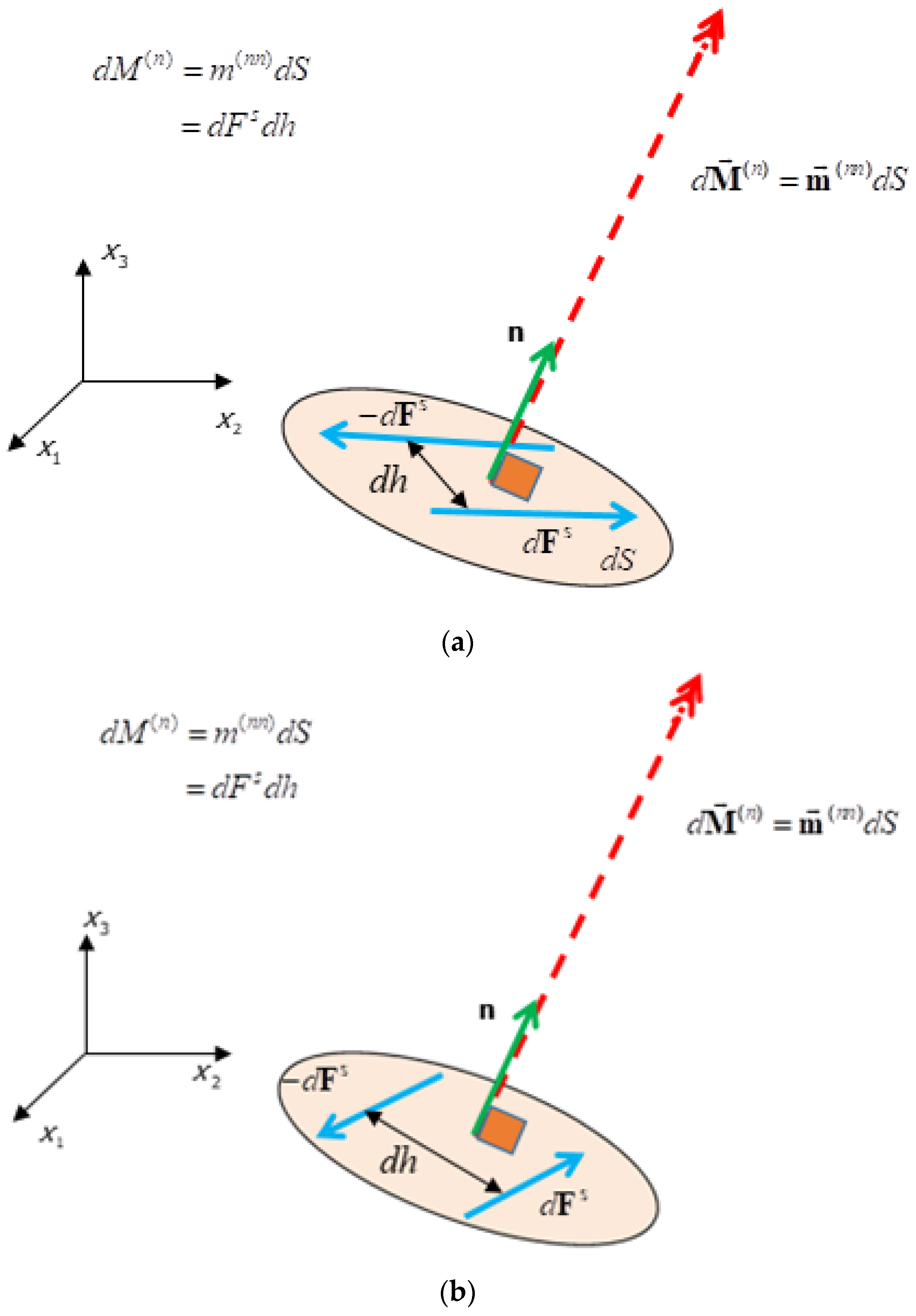
Theorem 2. The bending couple traction with tangential moment can exist on any surface as a double layer of shear force tractions.
Proof. If the surface bending couple with tangential moment
exists on the surface element
, it represents the effect of the system of couple forces
and
in the plane normal to the surface element
and normal to the moment vector
(
Figure 29). Two possible cases are examined as follows:
Note that the system of couple forces
and
is not unique for this case. This means that the bending couple with moment
can be represented by a system of equipollent forces
and
in an infinite number of ways. For example, this system of couple forces
and
can be arbitrarily chosen as either of equipollent systems of forces (a) and (b) non-parallel to the surface element
in
Figure 30. Therefore, if the tangential couple exists, it cannot be represented by a unique two-force system
and
non-parallel to the surface element
. This is in contradiction with the uniqueness of interactions in the continuum. Therefore, the couple forces
and
cannot be non-parallel to the surface element
.
- II.
The couple forces and are parallel to the surface element .
Figure 31 shows the unique system of couple forces
and
parallel to the surface element
. Therefore, the tangential moment
completely describes the effect of bending couple forces
and
parallel to the surface element
. This is in accordance with the uniqueness of interactions in the continuum, which not only shows that the bending couple
can exist, but also reveals its structure as a system of couple forces
and
parallel to the surface element
. □
Therefore, the bending couple traction with moment can exist as a double layer of shear force tractions and , where , on the arbitrary surface . Interestingly, this is the vectorial analogy of the double layer in electrostatics, where the tangential shear traction force distribution is analogous to a single layer of electric charge.
Therefore, a continuum supports piecewise continuous distributions of bending couple traction with tangential moment on any arbitrary surface as a double layer of shear force tractions.
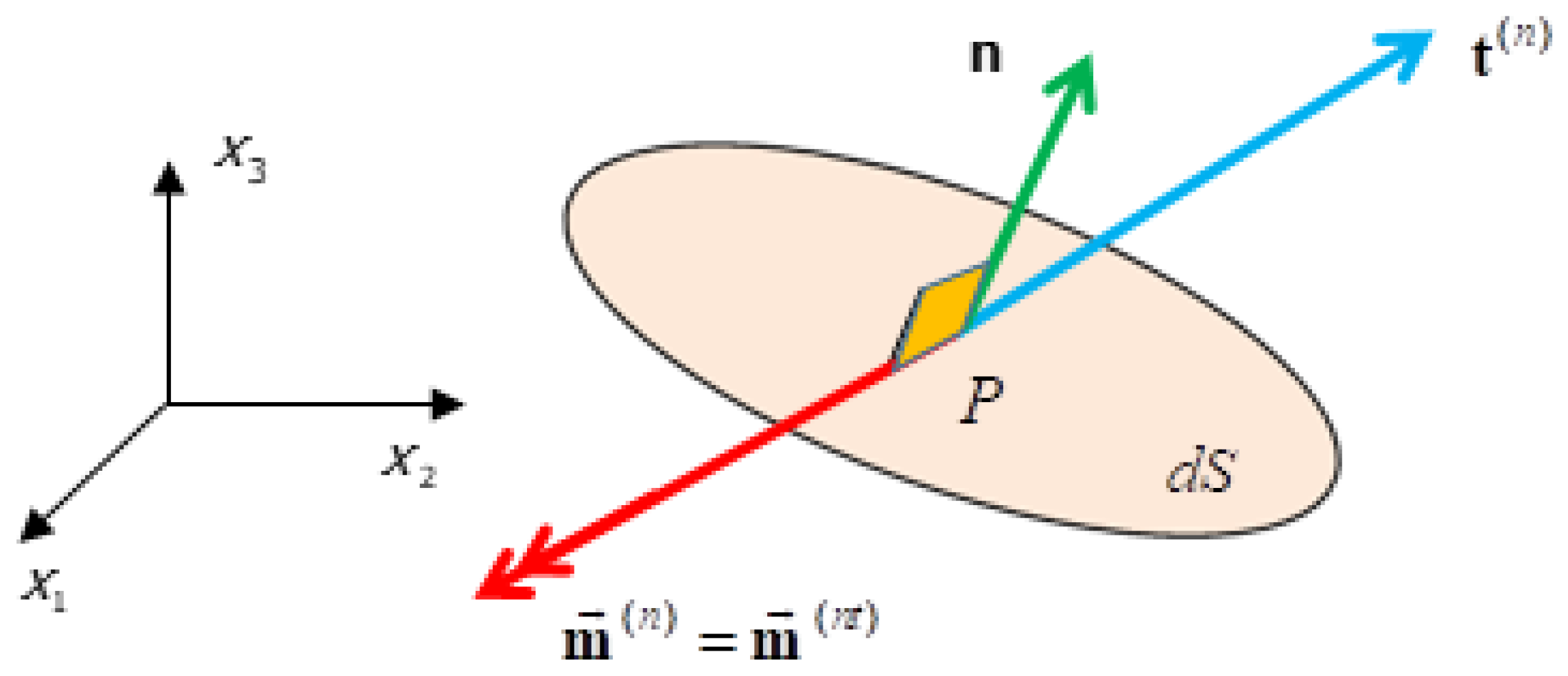
Because the bending couple traction is completely described by its tangential moment vector
, it can be denoted by
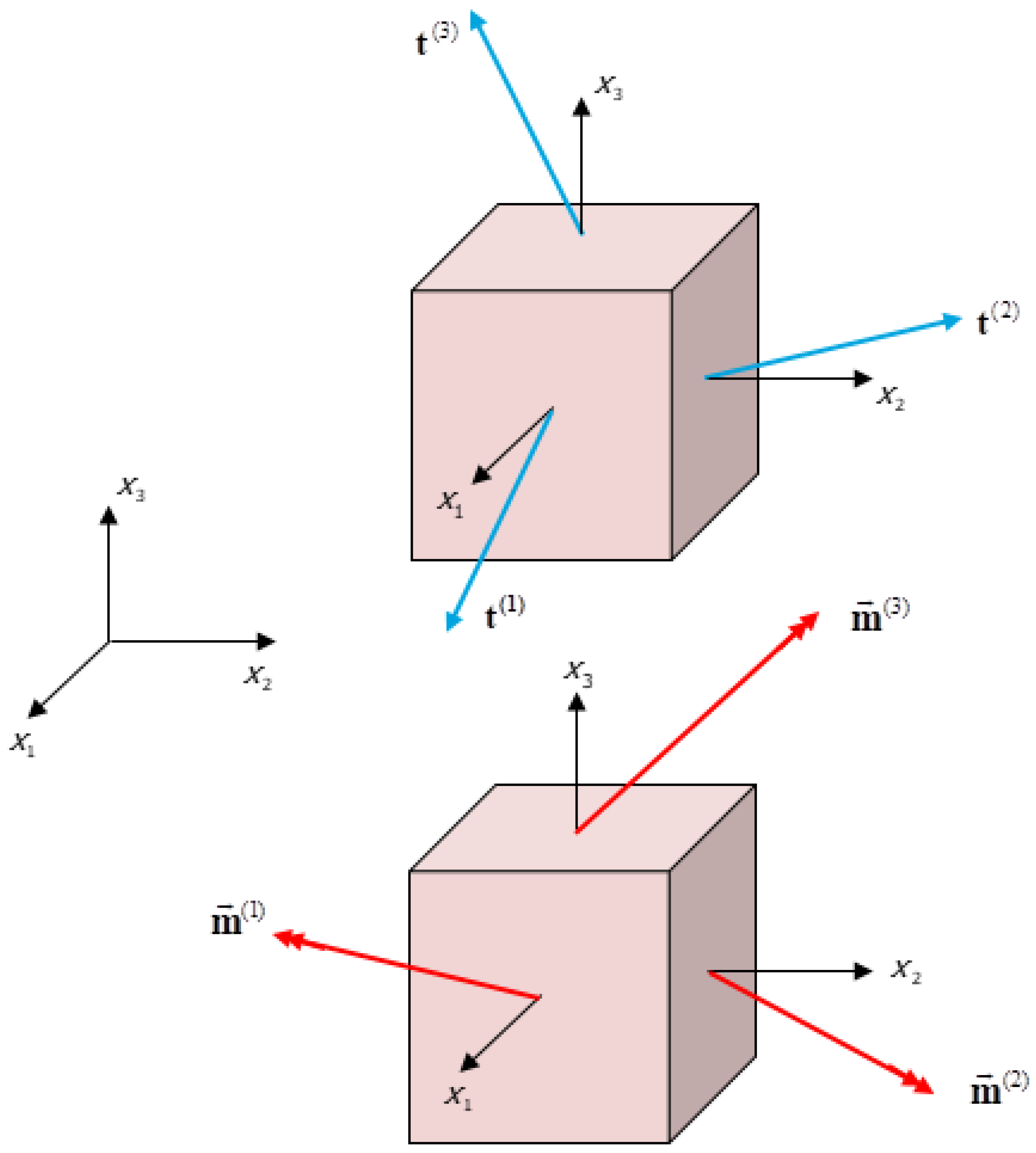
. Therefore, in consistent continuum mechanics, the load density acting at point
P on an arbitrary surface with unit normal vector
is equivalent to a system of force traction vector
and bending couple traction with tangential moment
, as shown in
Figure 32.
6.3. Skew-Symmetric Character of the Couple Stress Tensor and Its Consequences
As there is no twisting couple traction with the normal moment component
on any surface element
on the arbitrary
:
However, in this relation,
is arbitrary at each point; one may construct subdomains with any surface normal orientation at a point. Consequently, in (52),
is an arbitrary symmetric second-order tensor of rank one at each point. Therefore, for (52) to hold in general, the moment stress pseudo-tensor
must be skew-symmetric, that is
This is the fundamental character of the couple stress moment tensor in continuum mechanics, which guarantees that the couple traction moment vector is tangent to the surface, thus creating a bending effect. It should be emphasized that there is no mention of constitutive relations in any of this development, so these results are in no way limited to linear elastic materials or to isotropic response. In this development, there are no additional assumptions beyond that of the continuum as a domain-based concept having no special characteristics associated with the actual bounding surface over any arbitrary internal surface .
Because the couple stress system is completely described by its skew-symmetric moment tensor
, it can be denoted by
, and the term couple stress tensor
can be used. Therefore, in consistent continuum mechanics, the state of stresses at any arbitrary point is specified by the force stress tensor
and skew-symmetric couple stress tensor
. The skew-symmetric character immediately resolves the indeterminacy problem in the original couple stress theory developed by [
5,
6]. Because the diagonal components of the couple stress tensor vanish, the couple stress tensor is automatically determinate in this consistent couple stress theory.
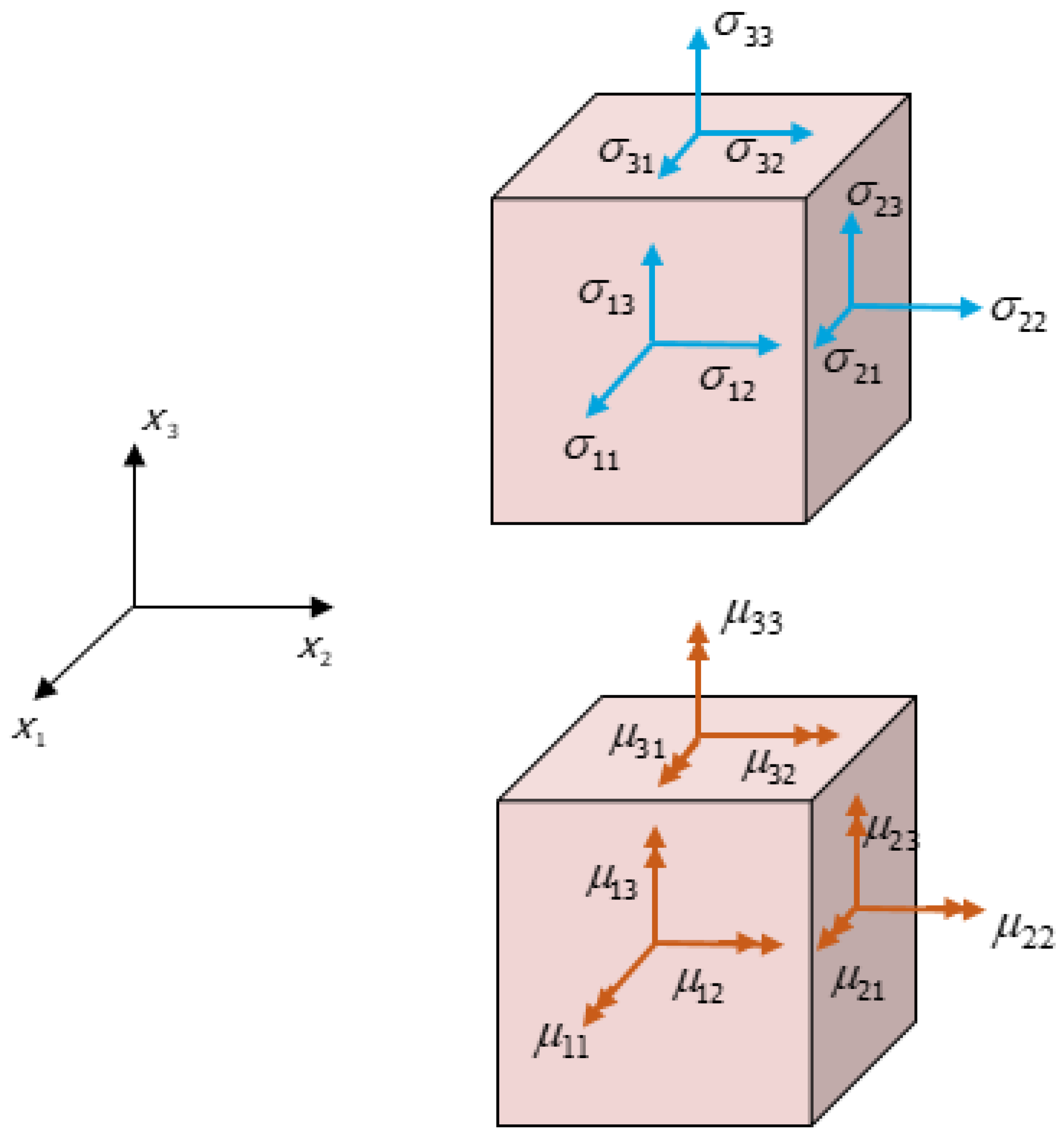
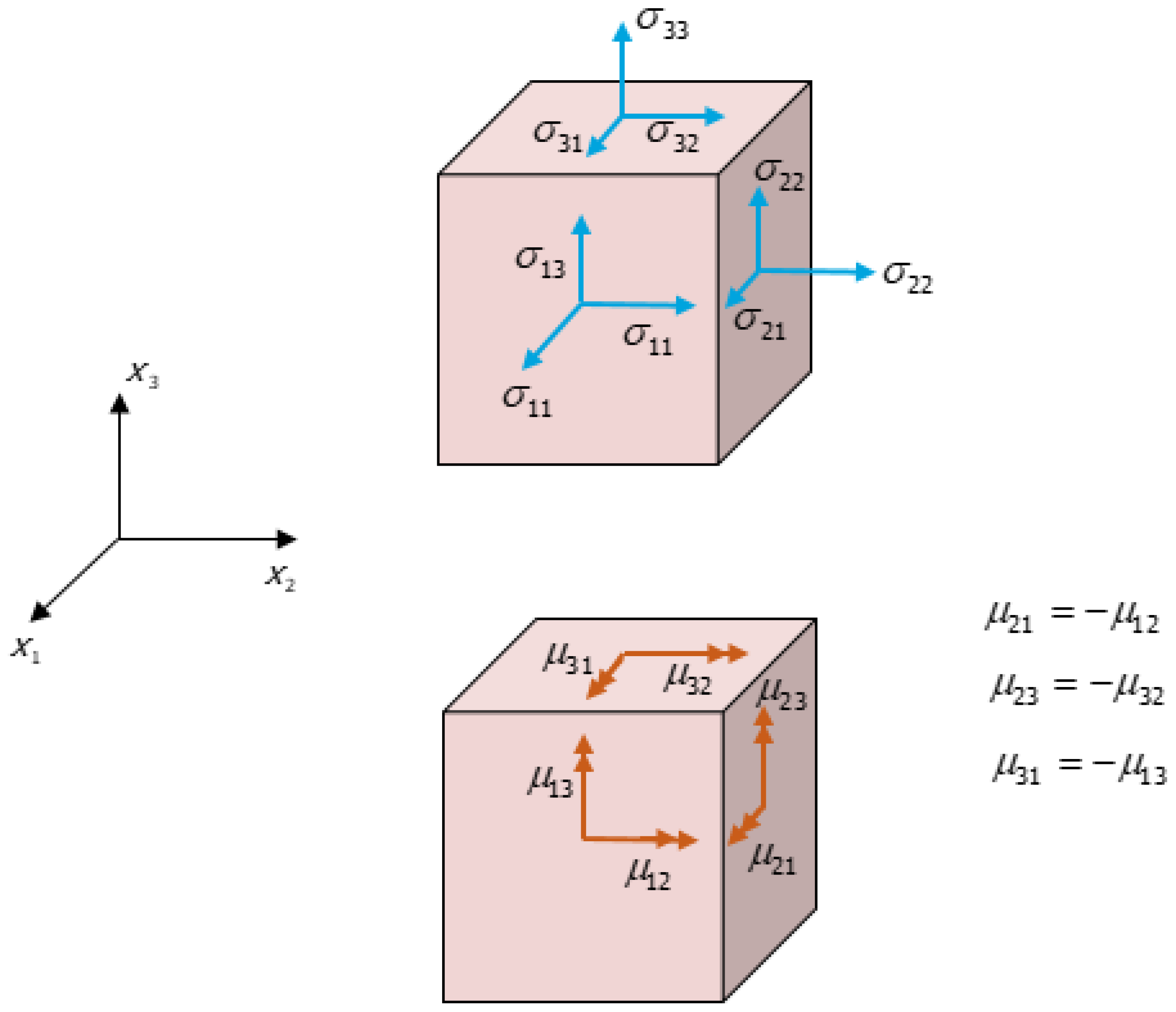
The components of the force stress
and couple stress
tensors in this consistent theory are shown in
Figure 33.
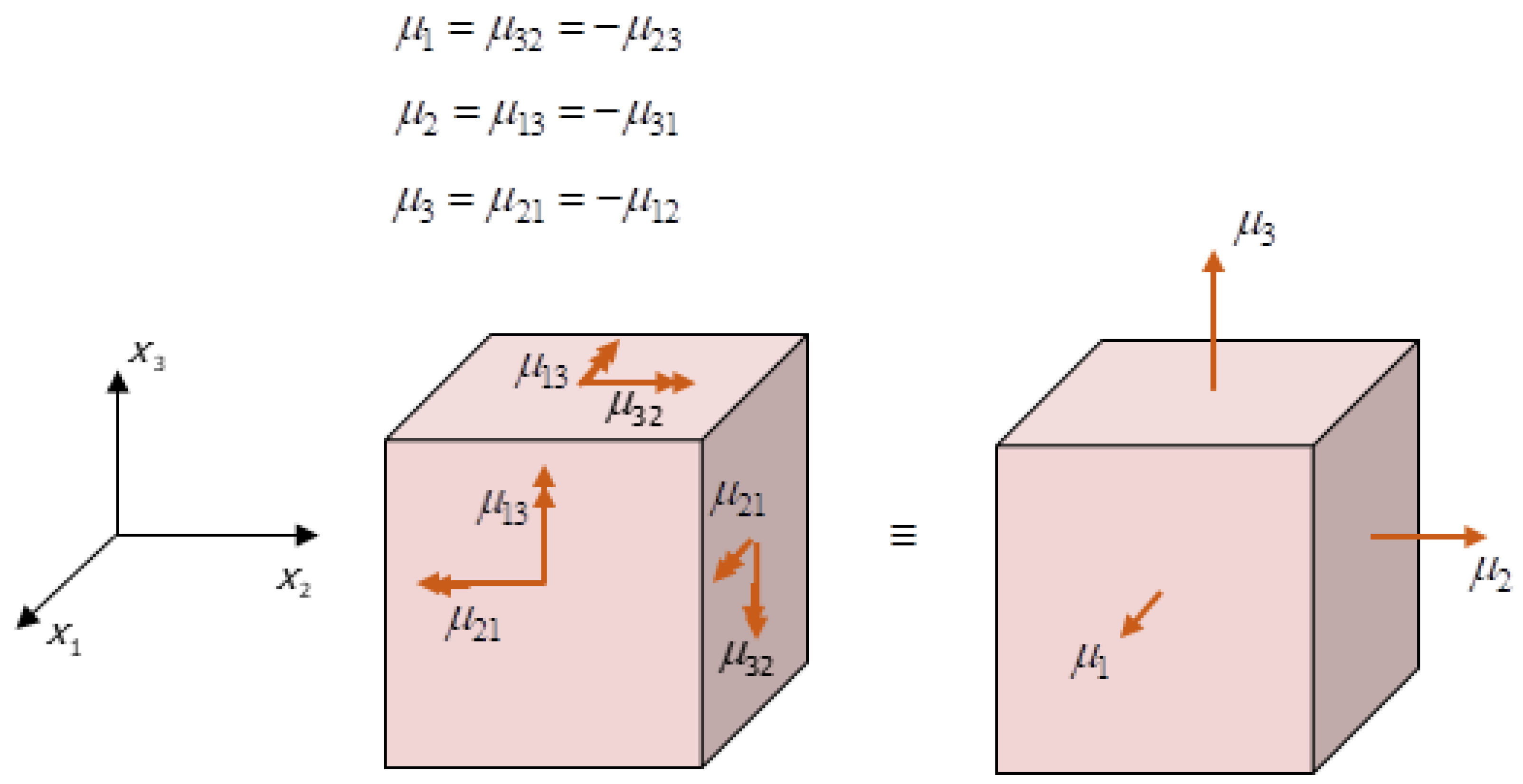
In terms of components, the skew-symmetric couple stress tensor (couple stress moment tensor) can be written as
As a result, the couple traction vectors
,
, and
reduce to
As the couple stress tensor
is skew-symmetric, it is singular. This means its determinant vanishes
and its rank is two. Interestingly, the determinant (56) can also be expressed as
or in vectorial form
Remarkably, the relation (58) shows that the three couple traction vectors , , and are linearly dependent. This interestingly means that these three vectors are coplanar. Then, any two of these vector tractions span a plane , while the third traction vector is a linear combination of the first two.
Also, notice that the three independent components , , and of the couple stress tensor are specified by the components of only two rows or columns of the matrix representation (54). Therefore, the couple stress tensor is specified by only two of the coplanar couple traction vectors , , and (, , and ). This means that the state of couple stress in the continuum is completely specified by two of the couple traction vectors, e.g., and . Note that this is an important implication of the skew-symmetric couple stress tensor.
Interestingly, the skew-symmetric tensor
can be represented by its dual true couple stress vector
[
10], where
This relation can also be written in the form
which simply shows
Components of the couple stress tensor
and its dual couple stress vector
are shown in
Figure 34. Note that the components of couple stress vector
have been presented as single-headed arrows.
Therefore, the couple stress pseudo-tensor
and couple traction true vector
can be represented as
The magnitude of the couple stress vector
is
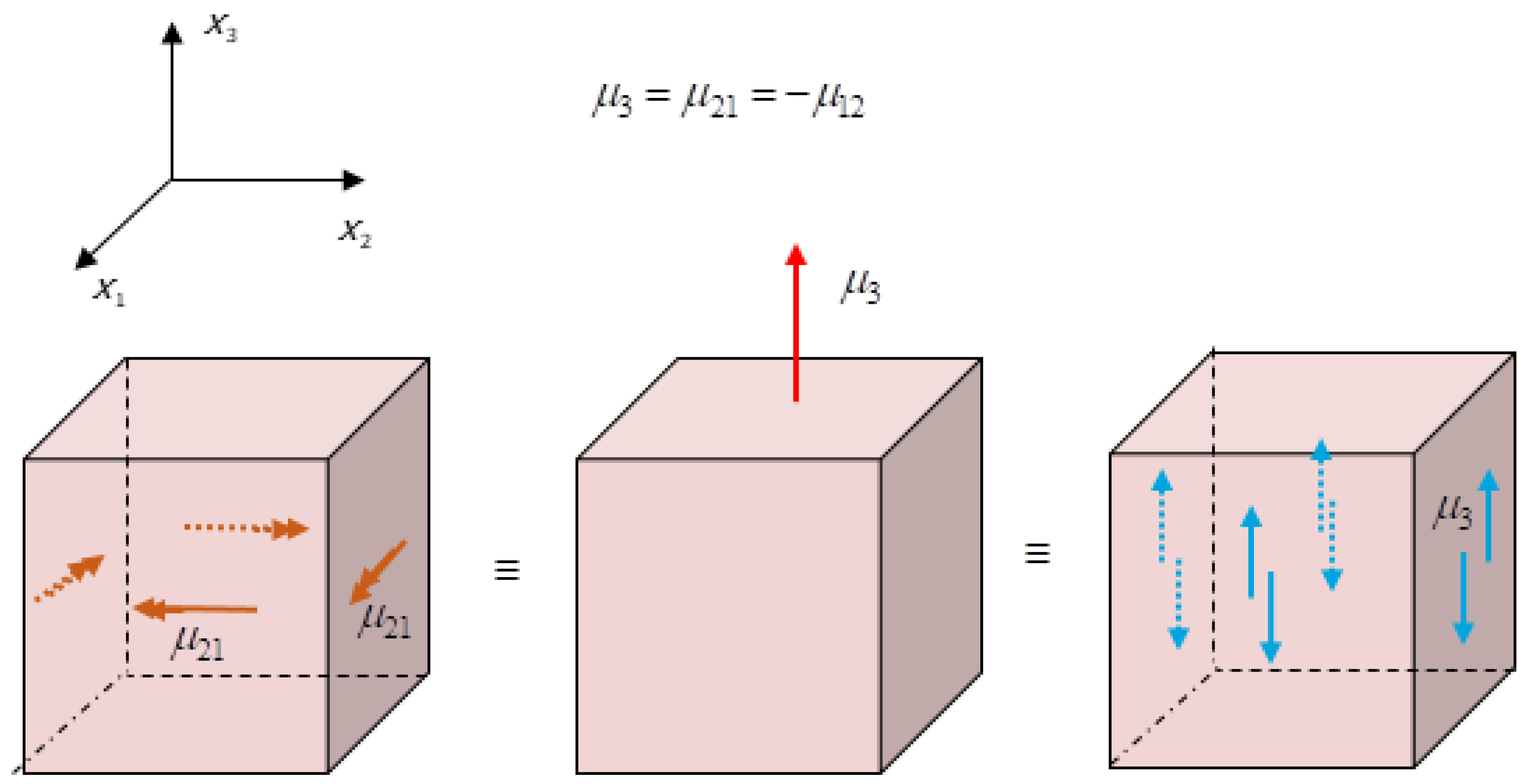
Note that the couple stress components
,
, and
represent the bending effect of the double layer of tangential shear force stresses on planes normal to coordinate axis
,
, and
, respectively. Interestingly, their dual couple stress vector components
,
, and
are in the direction of double layers of shear force stresses associated with the couple stress components
,
, and
, respectively. For example,
Figure 35 shows this double layer of shear force stresses for the couple stress component
corresponding to
.
Figure 36 shows this fact from a two-dimensional perspective.
Consequently, one can completely represent the effect of the couple stresses by using double-layer shear force stresses. It is remarkable to note that in couple stress continuum mechanics, the bending can be created not only by couple normal force stresses (
Figure 15) but also by couple shear force stresses in the form of double-layer shear force tractions (
Figure 36).
Interestingly, it is noted that the couple stress vector
is normal to the three couple traction vectors
,
, and
, that is
These relations indicate that the couple traction vector
is normal to the plane
. Remarkably, the couple traction pseudo-vector
can be expressed as
or vectorial form
This obviously shows that the couple traction pseudo-vector is in the plane and is perpendicular to the true couple stress vector .
The singularity of the skew-symmetric couple stress tensor also shows that it has one and only one zero eigenvalue. Therefore, to comprehend the character of this zero eigenvalue and its corresponding eigenvector, the eigenvalue problem for the couple stress tensor is considered as follows.
Because
, there is no direction
for which the couple traction
is parallel to the direction
. However, one can mathematically look for this direction, where
Therefore, the eigenvalue problem is obtained by using (67) in (46) as
where
is the eigenvalue of the couple stress tensor
. This relation can be written as
Note that the condition for (69) to have a non-trivial solution for
is
This is the characteristic equation for the tensor
, which can also be written as
As a result, the characteristic equation is the cubic equation
which can be written as
This equation shows that the tensor
has one zero eigenvalue and two purely imaginary conjugate eigenvalues. This is consistent with our expectation that there is no non-zero real eigenvalue. Let us call the eigenvalues
,
, and
and arbitrarily choose the third eigenvalue to be the zero eigenvalue. As a result, for these eigenvalues, the following relations hold:
Note that only for
, the associated unit eigenvector
is real, where
This shows that the couple stress vector
is in the direction of the eigenvector
of the tensor
corresponding to the zero eigenvalue
, where
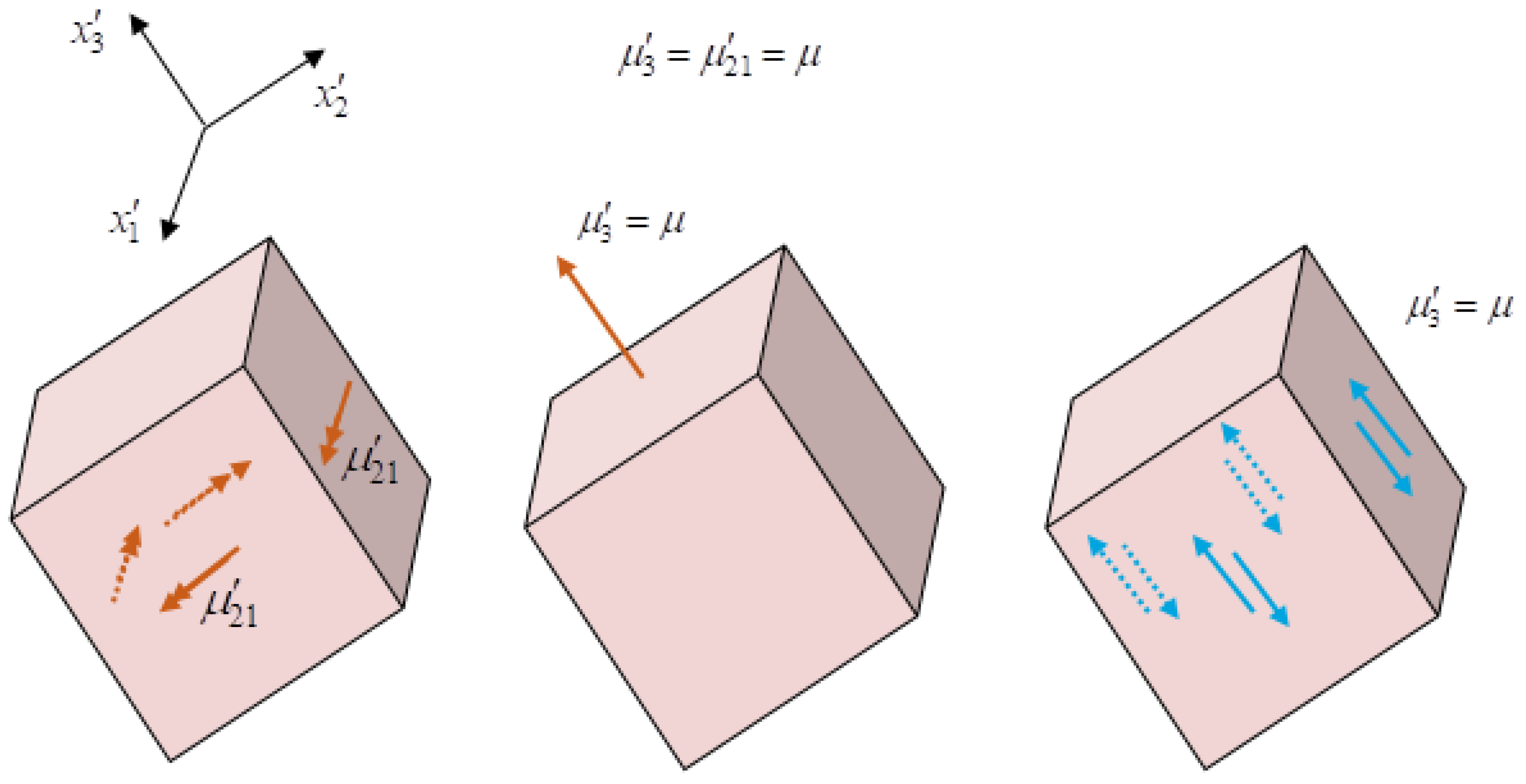
Now choose the orthogonal coordinate system
such that the axis
coincides with the direction of the real unit eigenvector
. Therefore, relative to coordinate system
, the unit eigenvector
is represented as
Interestingly, it is noticed that the plane
and the plane
are the same. Therefore, one may choose the orthogonal axes
and
arbitrarily in the plane
. The representation of the couple stress tensor and vector in this special coordinate system
become
where
Figure 37 shows the double layer of shear force tractions for the total couple stress vector
corresponding to
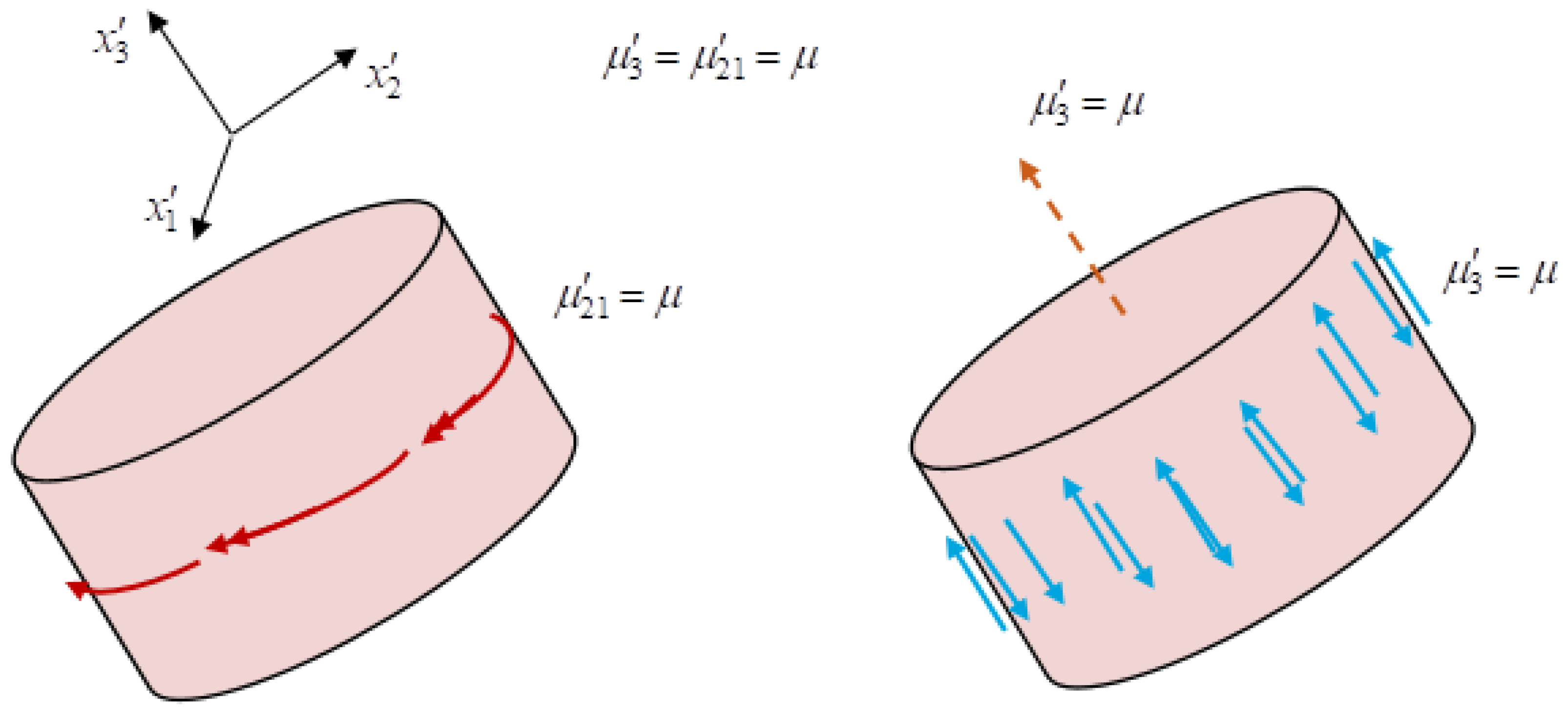
.
The effect of this couple stress on an infinitesimal cylindrical element along the
axis has been represented in
Figure 38, which causes pure bending specified with the mean curvature vector along the
axis [
10].
6.4. Consistent Fundamental Governing Equations of Motion in Differential Form
The differential form of the governing equations of motion for an infinitesimal element of matter is finally obtained as
where the couple stress moment tensor is skew-symmetric; that is,
.
It should be emphasized that the derivatives of stresses in the governing Equations (80) and (81) are of the first order. This is the character of the general fundamental laws of continuum mechanics in that their basic form should have first derivatives of stresses, not second or higher orders.
The force stress tensor is generally non-symmetric and can be decomposed as
where
and
are the symmetric and skew-symmetric parts, respectively. The relation (60) can be used to express the moment Equation (81) as
which indicates that
is symmetric. Therefore, its skew-symmetric part vanishes, so it follows that
Thus, the total force stress tensor can be expressed as
Therefore, there are nine independent stress components in consistent couple stress theory or general size-dependent continuum mechanics. This includes six components of and three components of .
Consequently, the force governing equation reduces to
which can be called the reduced force governing equation. Because this equation is a combination of the basic force and moment Equations (80) and (81), it cannot be considered as a fundamental law by itself. This can be confirmed by noticing that the highest derivative in the governing Equation (86) is of the second order.
Interestingly, relation (84) can be elaborated further by considering the pseudo (axial)-vector
as dual to the skew-symmetric part of the force stress tensor
, where
Then, by using (84) in (87), the following relation is obtained:
It is amazing to notice that the apparently complicated moment Equation (81) reduces to the simple curl relation (88). This is the result of the skew-symmetric character of the couple stress tensor.
7. Conclusions
In this paper, it has been demonstrated that the confusion in the concept of couple and its moment vector has been the main reason for the troubles in the progress of couple stress continuum mechanics in the last century. Here, it has been shown that the representation of a couple by its pseudo-moment vector in rigid body mechanics and to some extent in the elementary strength of materials and structural mechanics has been very misleading. This has given the false notion that the moment of a concentrated couple is a real concentrated vector and completely describes its effect. However, in continuum mechanics, the effect of a couple cannot be completely represented by its moment vector when investigating the deformation and internal stresses. There are an infinite set of equipollent couples with the same moment, which create different states of deformation and stresses. To represent the effect of a concentrated couple in a continuum completely, the couple moment and line of action of its opposite parallel forces must be specified. However, in the governing equations of motion, only moments of body couples, couple tractions, and couple stresses appear. This requires that if body couples, couple tractions, and couple stresses exist, their effects must be completely described by their moment densities , , and , respectively, without requiring the specification of the line of action of opposite parallel couple forces. This is the statement of the uniqueness of interactions in continuum mechanics, which imposes some restrictions on the form of body couple, couple traction, and couple stress distributions. Here, the uniqueness of interactions in the continuum has been used to establish that:
A distribution of body couple with moment does not exist;
A given body couple can be replaced with an equivalent body force and a surface shear force traction;
A distribution of surface twisting couple traction with normal moment does not exist on any arbitrary surface inside the body;
A distribution of surface bending couple traction with tangential moment can exist;
The surface bending couple traction is a double layer of shear force tractions;
The pseudo-couple stress moment tensor is skew-symmetric and has a true vectorial character;
The effect of couple stress is completely described by its skew-symmetric moment tensor ; thus, it can be called the couple stress tensor . However, more precisely, this is a pseudo-tensor.
It is remarkable that the skew-symmetric character of the couple stress moment tensor has been systematically established by examining the concepts of moment and couple and fundamental governing equations. Interestingly, by using elements of the work of Mindlin and Tiersten [
5] and Koiter [
6] regarding boundary conditions in the indeterminate couple stress theory, Hadjesfandiari and Dargush [
10] realized that twisting couple traction with moment
does not exist in a continuum and established the skew-symmetric character of the couple stress moment tensor
. However, this original proof does not specify the mechanism of action of the bending couple traction and couple stresses. This clearly shows the superiority of the new more fundamental proof based on the uniqueness of interactions in continuum mechanics, which also reveals the structure of bending couple traction as a double layer of shear force tractions. Interestingly, this is the tensorial analogy of the double layer in electrostatics, where the single layer of tangential shear traction force distribution is analogous to a single layer of electric charge. As a result, couple stresses act as a double layer of tangential shear force stresses on their associated planes.
The present systematic discovery of the skew-symmetric character of couple stress tensor consistently results in the complete form of size-dependent continuum mechanics, which can give us more fundamental insights about the behavior of solids and fluids at the smallest scales for which a continuum theory is valid. For example, it provides a fundamental basis for the development of size-dependent nonlinear elastic, elastoplastic, and damage mechanics formulations that may govern the behavior of solid continua at the smallest scales.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}