1. Introduction
Fractional calculus (FC) is one of the most important branches of mathematics that deals with arbitrary order integrals and derivatives. The concept of FC has been efficaciously investigated to focus on various problems in physics, signal-processing, engineering, bio-science, and different fields in recent years. Fluid waft, electrical networks, fractals’ theory, control theory, electromagnetic theory, facts, optics, capacity theory, diffusion, and viscoelasticity are just a few of the real-world applications of fractional calculus (see, for instance, [
1,
2,
3,
4,
5,
6,
7,
8]). Mathematical modeling transforms many applied problems into a set of fractional differential and integral equations [
8,
9,
10]. Because the analytical solution of fractional differential equations is difficult to acquire, numerical techniques are used to estimate the solution of a system of integro-fractional differential equations.
Al-Nasir [
11] used quadrature methods to solve Volterra integral equations of the second kind. Al-Rawi [
12] used it to solve the first kind of integral equations of the convolution type. Saadati and Shakeri [
13] used the trapezoidal rule to solve linear IDEs. Al-Timeme [
14] used quadrature approximation for the first order of VIDEs [
15]. Moreover, Ahmed and Hamasalih [
16] applied quadrature with forward finite differences to solve numerically the linear Volterra integro-fractional differential equations. In another survey, Shen and Liu [
17] and Liu et al. [
18], using explicit finite differences to approximate the solution for special types of fractional diffusion equations, successfully discussed the theoretical error analysis and accuracy. In this work, the scheme was treated using a new technique for finding the solutions of LSVI-FDEs based on explicit central finite difference approximation via the trapezoidal rule combined with a linear spline approach. The first step was described, summarized in a decent algorithm, and, ultimately, a computer program MatLab was built.
In this paper, we consider the multi-order linear system of Volterra integro-fractional differential equations (LSVI-FDEs) of Caputo type with a constant coefficient, in the general form, for all
:
together with initial conditions:
where
with
and
. The
for all
and
, and
for all
as well as
and
. The
denotes the given continuous functions for each
. The
is the unknown functions, which are the solution of system (1). The
is a scalar parameter. The
indicates the
-Caputo fractional derivative of
on
and
for all
. Now, we give the definition and the basic properties of the fractional integral and derivative as follows.
3. Solution Techniques
In this section, we will investigate a new algorithm for treating a linear system of VIFDEs using TR-CFDA, trapezoidal methods with the aid of central finite difference approximation. The well-known trapezoidal approach splits the interval
into
-subintervals of size
with grid points
,
. Then, the integration may be written as:
Hence,
is weights for trapezoidal rule (5), where
[
24].
Recall Equation (1), for all strictly decreasing fractional orders
and
, with initial conditions
, taking
for all
and setting
and
for all
and step size
. Thus, for all
and for each
:
Thus, we approximated the fractional differential parts by central finite difference in Lemma 3, Equation (4) and the integral parts in Equation (6) by trapezoidal rule Equation (5); so, we obtained the following equation:
We obtain the following equation for finding an approximation
to
for all
and
, while
as initial beginning values are supplied from initial conditions after some basic manipulation:
whereas
and denotes
.
We can conclude the formula (11) for all
and
after assuming that:
Consequently, Scheme (11) can be rewritten in the following matrix form for all
:
where
with assumptions that
for each fractional order
. The sign
denotes that the first kernel matrix and last kernel matrix (i.e., when
and
) are multiply by
; other kernel matrices are multiplied by
only. For more details of Equation (14), since (
):
Suppose that for each pair’s point
we define the kernel matrix
of dimension
as:
Note that, if
in Equations (11) or (12), we must know
and
in order to compute
in the first step, whereas we can determine
from initial conditions but must develop a new technique to get
. Here, a piecewise linear function for the spline of degree one [
25] is proposed as a linear classic spline approximation (LSA) approach. For all
, can be written for our system:
For each and that satisfy the conditions, the domain of is an interval , each is continuous on and there is a partitioning of the interval such that each is a linear polynomial on each subinterval , symbolized as and , and we have the linear expression where , for all and . The following lemma discusses how to generate a fractional derivative for all linear spline functions using the Caputo fractional derivative of linear classic spline functions.
Lemma 4 ([
26])
. The Caputo fractional derivative of linear classic spline functions of order , , for all , with respect to formed as:where . With , (so we are working on interval for all ), and equal steps sizes, for all , and the Lemma 4 becomes: For every
, approximate
by
. In system Equation (1), for every strictly decreasing fractional order
and
, and putting
and
for all
with step size
, with initial conditions
, assume
for all
. Furthermore, using Lemma 4, Equation (16), and the definition of a basic linear spline function, we can rewrite Equation (1) as follows for every
and each
:
Note that we are using the ‘empty sum’ convention
and assume that:
For each , give from the initial conditions of (2).
As a result, for each
, Scheme (17) may be expressed in the following matrix form:
where
, for all
,
and
with
for each
, define
and
in Equations (21) and (22), respectively, by:
Therefore, for finding
, approximate by
, while
are given from the initial conditions. Thus, Equations (20)–(22) for
become
where
with
for each
. Define:
In matrices, the iterated integral is determined numerically using the Clenshaw–Curtis rule [
27]. The Algorithm 1 obtains the CFDA solution for LSVI-FDEs of fractional order in
using the TR employing LSA:
| Algorithm 1. [ASVIFT-C (0,1]]. |
Step 1:
. , which, from initial conditions (2), are given.
Step 2:
, we use Equations (9) and (18), respectively. .
Step 3::
. , apply numerically a rule (the Clenshaw–Curtis rule) to calculate:
. .
Apply the Jacobian iteration method [ 24] to solve the linear system:
where .
Step 4::
.
where
. |
4. Error Estimate
In this part, we will evaluate the discretization error for both numerical techniques of LSVI-FDEs, and we will construct the main notion for numerical fractional problem solving (1) and (2).
Lemma 5. Suppose thatis a smooth function and let, with. Then,for arbitrary order.
Proof. From the Definition 3, for arbitrary order
, there is
□
We may derive the following using the classic first-order central difference formula [
24]:
Equation (23) is obtained using the integral mean value theorem [
24] and the smoothness of
:
When the formulas (24) and (25) are combined, the result is
Note: For the representation error, taking into account the first few steps, we can demonstrate the following:
[
24]. We have
By the intermediate value theorem [
24], taking into account the smoothness of
there exists a number
such that
The total error in the approximation is
For all
, the computed values
are related to the true values
by the formulas:
and
If it is assumed that the errors,
s, are bounded by some number
and the third derivative of
is bounded by a number
, then
We must decrease
to reduce the truncation error,
; but, as
is reduced, the roundoff error
grows. In practice, allowing
to be too small is rarely useful since the rounding error will dominate the calculations. If some analysis is performed on the error term,
Calculus can be used to verify that a minimum for , , occurs at . In actuality, we cannot compute an ideal to use in estimating the fractional derivative since we do not know the function’s third derivative. However, we must keep in mind that lowering the step size does not necessarily result in better approximation.
5. Stability Analysis of LSVI-FDEs
The stability of the trapezoidal rule and linear classical spline functions for the linear system of VI-FDE, which is a multi-level explicit central finite difference scheme on the bounded domain , is discussed in this section. First, the following lemmas are needed:
Lemma 6 ([
28])
. If where and , then the characteristic roots of are the characteristic roots of taken together with the characteristic roots of : .
Lemma 7 ([
29])
. Let be any arbitrary square matrix and the spectral radius of . Then, for any operator matrix norm, . Moreover, for any given positive number , there exists a norm of the matrix , such that .
Lemma 8 ([
24])
. Suppose is a square nonsingular matrix and is an eigenvalue of . Then, is an eigenvalue of the matrix .
Theorem 1. If, is the eigenvalues of matrix, with continuous bounded kernels,, whereis the matrixandfor all, a multi-level explicit central finite difference scheme by the trapezoid method (12) and a linear spline procedure (20) are conditionally stable in the sense of the von Neumann condition for stability [
30]
of vector finite difference. Proof. Now, if we assume that is the approximation of Equation (17) (for ) and of Equation (11) (for ), respectively, for all and , then the error for each and satisfies:
First, use Equation (17) for
and error definition to obtain
Second, use Equation (11) for
and error definition to obtain
with
, where
and
. The following matrices’ linear systems are the outcome of the previous Equations (27) and (28):
where
,
. Furthermore,
is defined in Equation (12), while
are defined in Equations (9) and (10), respectively, and
are defined in Equations (18) and (19), respectively. Finally, here
is the kernel matrix at any point
in the basic domain. □
Assume that the diagonal matrix
contains all eigenvalues and all
s are real and greater than or equal to
, i.e.
for sufficiently small
(
fixed). As a result, we may deduce that
possesses an invertible, say,
[
29], which states that “A square matrix is singular if and only if one of its eigenvalues is zero.” Second, the integral kernel matrix
has
-eigenvalues, say,
s. The
,
are the
-th eigenvalues of matrix
as a result,
has an invertible, say,
, which means ‘by identical rezone above’, which can be rewritten from Equation (29) as follows:
where
System (30) may be reframed as
where
denotes block vectors with
terms of
, with
as the last block term, and
denotes a
lower triangular block matrix, each of which contains a matrix of order
.
From Lemma 6 we conclude that the eigenvalues of block matrix
are the eigenvalues of all diagonal block matrices of Equation (33), which are
and
. The norm of
, from the assumption before that all eigenvalues
and letting
be the eigenvalues of
; so, by Lemma 8,
. Thus, by definition of the spectral radius
of any square matrix [
29],
, where
is the eigenvalue of
and
set of all eigenvalues of matrix
, while all eigenvalues are less than or equal to
; thus,
.
Suppose that is a square matrix of order . Then, converges to zero matrix as if and only if . This is the second condition. Thus, .
Apply Lemma 7, , by Archimedean property. Since and then there exists such that , that is, .
For
, from Equation (31), yields
, while from Equations (13) and (14)
and
are defined as
and
. Therefore,
where
The kernels are bounded, say, by
. Since the continuous function on a compact domain is bounded and all
, therefore
. Thus,
For
, from Equation (31), yields
, while from Equations (13) and (14)
and
are defined. Thus,
where
and
By the same rezones as before (step
), we obtain
, while
, for each
,
and
Therefore, the maximum eigenvalue of is one of the eigenvalues of diagonal block matrix . Thus, . Therefore, we obtain the stability theorem.
6. Convergence Analysis of LSVI-FDEs
The convergence of the solution of the LSVI-FDEs (1) and (2) is demonstrated in this section using central finite difference approximations and the trapezoidal technique.
Definition 5 ([
31])
. Let be a class of LSVI-FDE of the form (1-2), if every system in . Then, the approximation method central finite difference trapezoidal approximations are said to be consistent with (1–2) for that class of system . If for every system in there exists a constant (independent of ) such that then the method is said to be consistent with order in . Theorem 2. Ifand(the eigenvalue ofwhich is) are greater than 1, then the multi-level central finite difference scheme using the trapezoidal method, Equation (12), for LSVI-FDEs (1–2) is convergence over the class .
Proof. Assume that the solutions
for Equations (1) and (2) and the kernels are such that the approximation method (12) is consistent with (1). Let
be the numerical solution of this issue at point
, and define
, with
, for all
and
. Substituting
into Equation (7) and using Equations (9) and (10) leads:
□
Since the numerical evaluation by TR for the integral part in LSVI-FDEs at any point such that
, using the definition of a local consistency error [
31] is formed as:
Recalling Lemma 5 with Equation (34) and using the basic problem, Equations (1) and (2) LSV-IFDEs, after some manipulations we obtain:
with the initial condition
and
for all
. Consequently, Scheme (35) can be rewritten in the following matrix form
where
with assumptions is expressed in Equation (14) and since
is the local consistency error vector for the basic system at point
. Moreover,
is a numerical error vector with
zero vector,
, and
For the first steps,
, perform the same stages before for the equation classical linear spline (17) and define
and
Li0 =
ui(
t0). Therefore,
for all
that, is
zero vector. Apply the definition of a local consistency error for linear spline
[
31] as:
Recalling Lemma 5, Equation (37) and using the basic problem, Equations (1) and (2) LSV-IFDEs with Equations (18) and (19), after some manipulations, take
for all
.
Consequently, the above equation can be written in the following matrix form
where
,
is the kernel matrix defined in (15), and
. If we assume that the eigenvalue of
is
, i.e.,
, then we have that
is invertible, i.e., has an inverse, say,
. Therefore, by Lemmas 7 and 8 and using Archimedes property, with the same procedure that exists in the stability part, we can obtain
where
Additionally, note that matrix
is a diagonal matrix, and all the eigenvalues are
. Thus, the eigenvalues of
are
, which is less than or equal to 1, and we conclude that
. Thus, by Lemma 7 there exists a positive number
such that
From the continuity property of kernels,
, a continues function on a compact domain is bounded; so,
for all
and
. Take
such that
. Thus,
The
is a maximum one of constant coefficients
. Apply the Archimedes property
Then, there exists a positive integer number, say,
such that
. Since, from Equations (14) and (15), the norm for the kernel matrix at any point in the domain becomes
and
yields
Hence, for
, we can obtain
because, recalling the
from Equation (14), while
for all
, then
where
and
Since, in our problem (1), all
and
are finite, the finite sum of finite parts is finite. Apply the Archimedes property
Then, there exists a positive integer number, say,
such that
. By the property of continuity, all kernels are bounded,
. Therefore, as before, we have
Hence, for and , we can obtain
Since
for any fractional order,
lies between
, that is,
, for all
. Recall the
from Equation (14)
where
and
Additionally,
for all
as before, we have
Thus, for
and
,
notes that
; so, the relation following is true also.
Now, mathematical induction is used to analyze the convergence. We assume that the following inequality holds for all
.
To prove it is true for
, we must show that:
From Equation (36) and using Equations (40), (42)–(44), we have:
Thus, we prove the Equation (45). Therefore, we complete proving that the following relations are true for all
:
Note that is finite and is also finite. Thus, is finite for each input . From Definition 5, we have whenever is decreasing. Consequently, when , we have , i.e., for each , for each . Therefore, we obtain the convergence theorem.
7. Numerical Results
Some numerical examinations for defining problem LSVI-FDEs using CFDA via TR with the aid of LSA are described here. Their findings were achieved by running programs created specifically for this purpose in MatLab using the ASVIFT-C (0,1] algorithm. The least square error is indicated by and defined as for each problem.
Example 1. We consider a system of two linear VI-FDEs:wheretogether with initial conditions and , while the exact solution I, and.
Which is a linear system of VI-FDEs with constant coefficients for various fractional orders between
and
. Take
and
. From Equations (9) and (10), and Equations (18) and (19), respectively, where
and
with
,
,
by running the MatLab program ASVIFT-C (0,1] we obtain:
and
For all
. After applying step (3) in the ASVIFT-C algorithm and applying the Clenshaw–Curtis rule (fixing the numbers of mesh points) to calculate the integrals, we obtain the linear system:
We can solve it by any numerical way, obtaining the
. We completed all the steps in the algorithm.
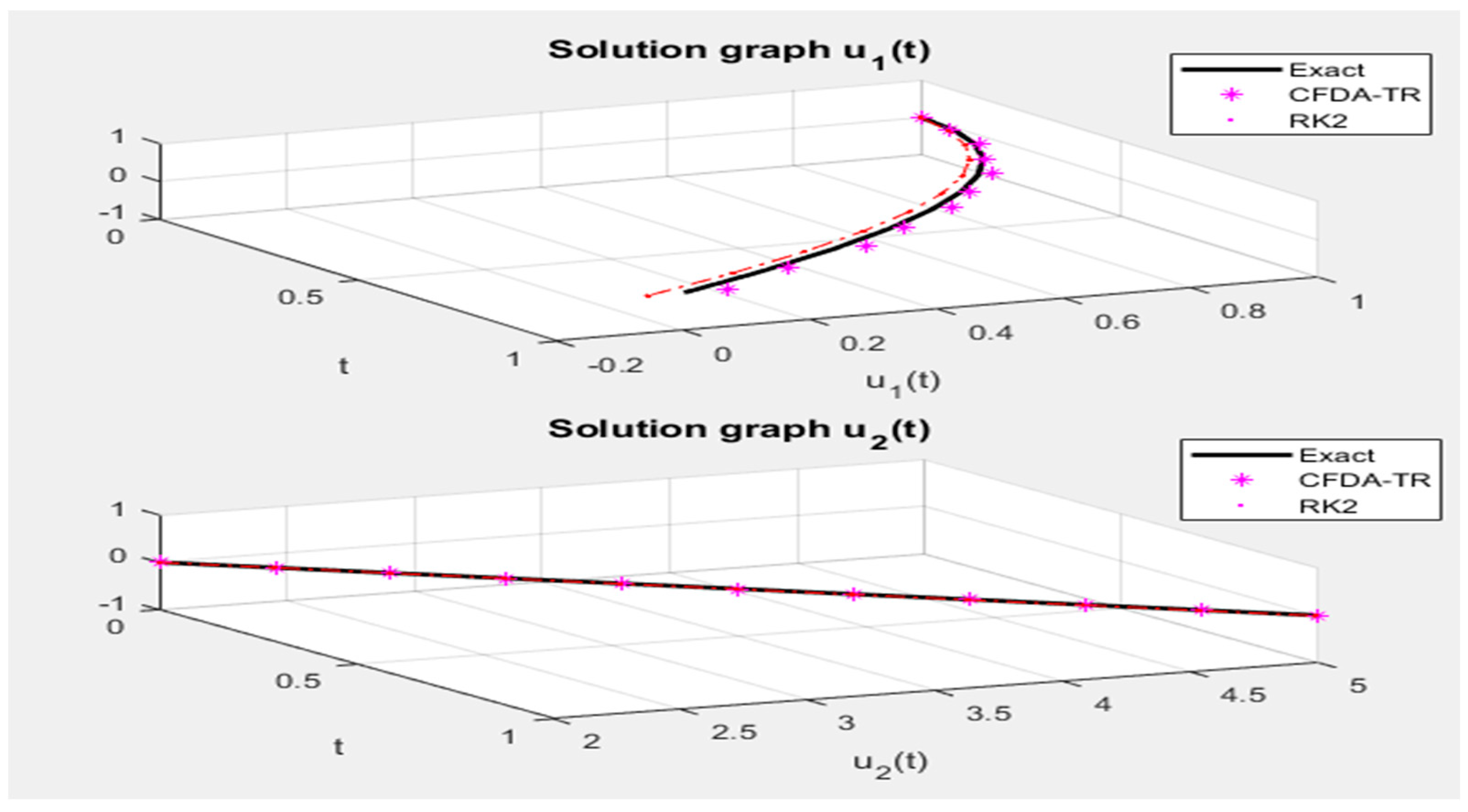
Table 1 presents a comparison between the exact solution and the Runge–Kutta methods (RK2) in Reference [
21], with the numerical solution of the central finite difference techniques via trapezoidal methods (a new method) for
and
depending on the least square error, see
Table 1,
Table 2 and
Table 3 and
Figure 1.
Example 2. Consider that a linear system of VI-FDEs for fractional multi-order lies inon a closed, bounded intervalwherewith initial conditions , the exact solutions are , where is the Mittag–Leffler function of two parameters and is defined by [
3].
Take
, and
. From Equations (9), (10), (18), and (19), respectively, where
and
with
,
, by running the MatLab program ASVIFT-C (0,1], we obtain:
and
For all
. After applying step (3) in the ASVIFT-C algorithm, we obtain the linear system:
We can solve it by any numerical way, obtaining the
. Then, complete all the steps in the algorithm.
Table 4 presents and compares the exact solution with the numerical solution of central finite difference techniques via trapezoidal methods for
and
depending on the least square error and the mean least square error of the given system with running time, see
Table 4 and
Table 5 and
Figure 2.
Example 3. Consider that a linear system of VI-FDEs for fractional multi-order lies inon a closed, bounded interval:wheretogether with the initial conditions , while the exact solutions are .
From Equations (9), (10), (18), and (19), respectively, where
and
with
,
and the constant coefficients are
by running the MatLab program of algorithm ASVIFT-C (0,1] with a fixed
we obtain:
and
For
. After applying step (3) in the ASVIFT-C algorithm, we obtain the linear system:
We can solve it by any numerical way, obtaining the
. Then, complete all the steps in the algorithm.
Table 6 presents and compares the correct solution to the numerical solution of central finite difference techniques via trapezoidal methods for
,
and
depending on the least square error and the mean least square error of the given system with running time, see
Table 6 and
Table 7 and
Figure 3.






{kind=link}
{kind=link}
{kind=link}