
A Continuous Terminal Sliding-Mode Observer-Based Anomaly Detection Approach for Industrial Communication Networks


Abstract
:1. Introduction
- How to develop an observer for a class of systems where parts of states are unmeasurable.
- How to increase the convergence speed of the internal dynamics in the observer.
- How to design a smooth output injection of the observer and apply it directly for the estimation algorithm.
2. Problem Formulation and Preliminaries
- The error system (3) converges to zero asymptotically or in finite-time by using the output injection of the observer.
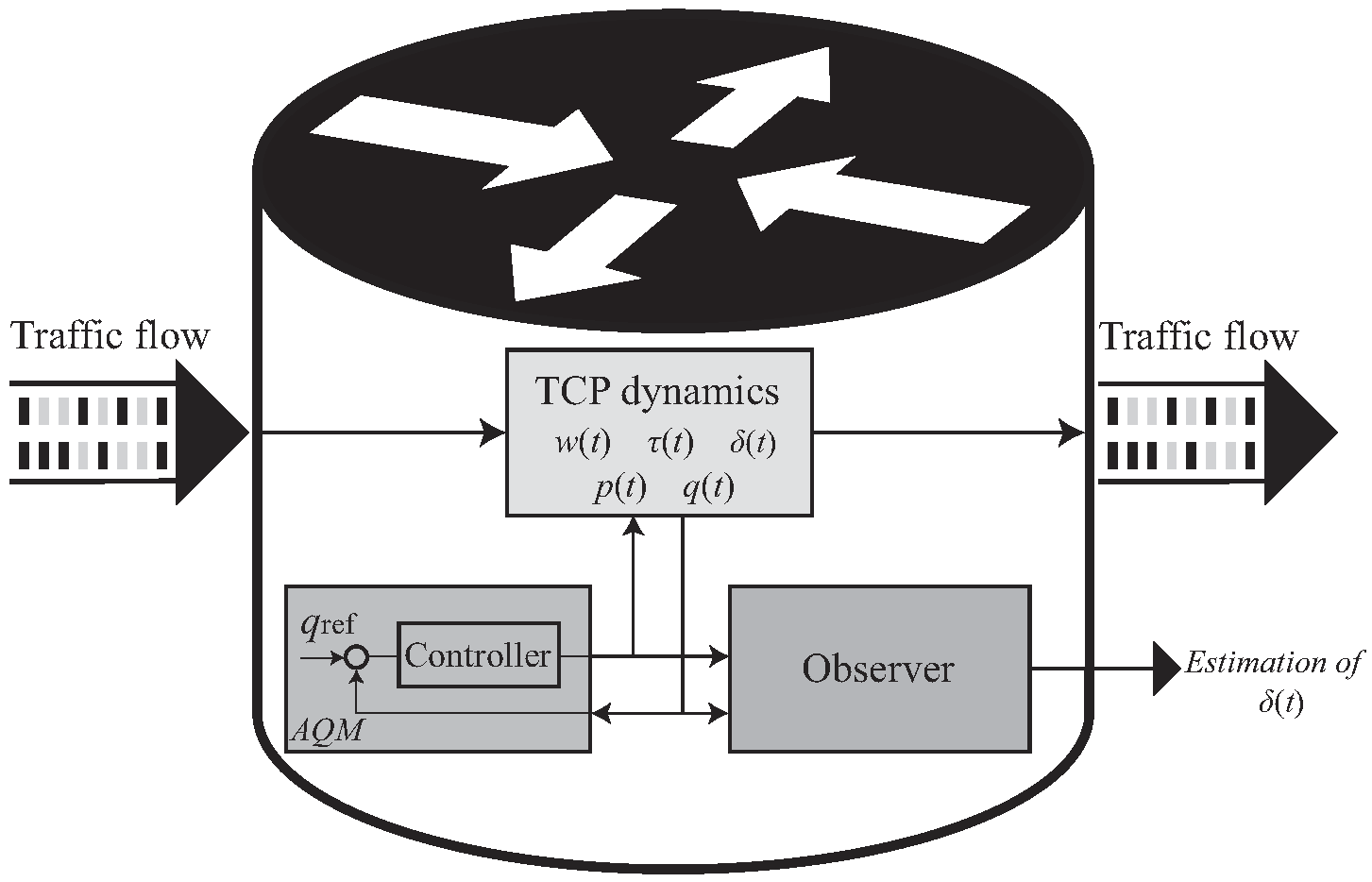
3. Fluid-Flow Model of Industrial Networks
4. Design of the TSM Observer
4.1. Measurable Error Subsystem
4.2. Unmeasurable Error Subsystem
5. Real Traffic Replay Results
5.1. Real Traffic Replay Setup
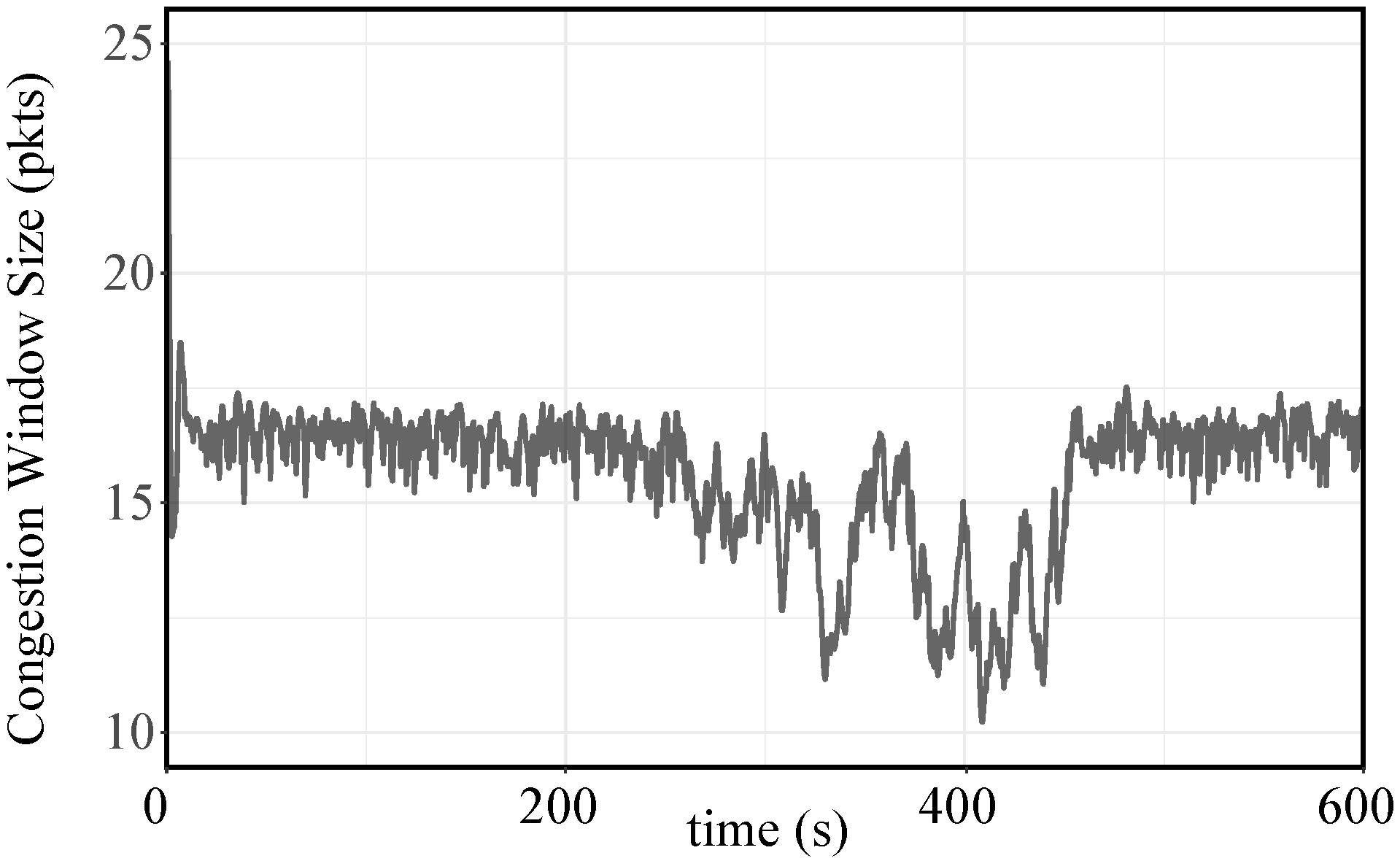
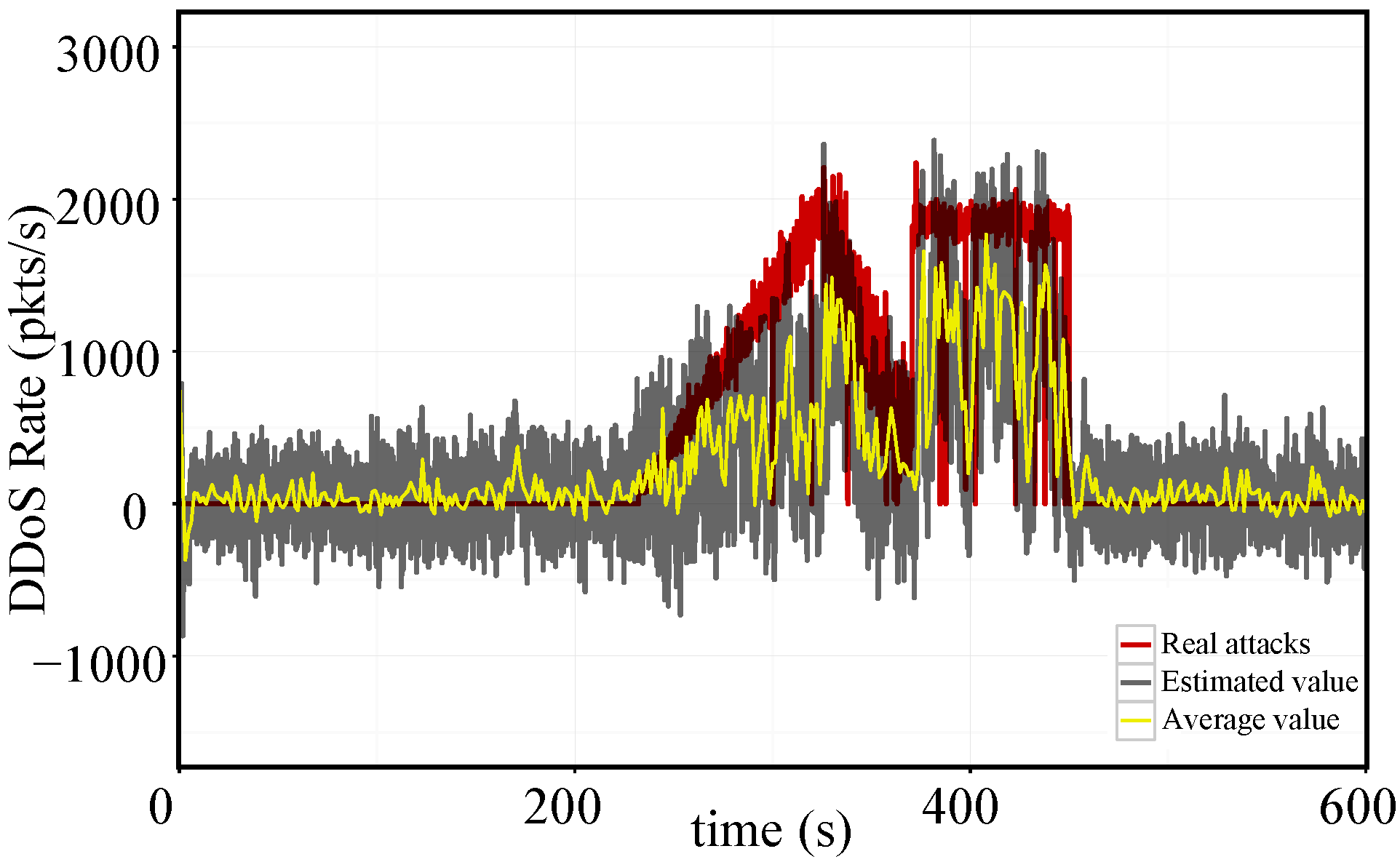
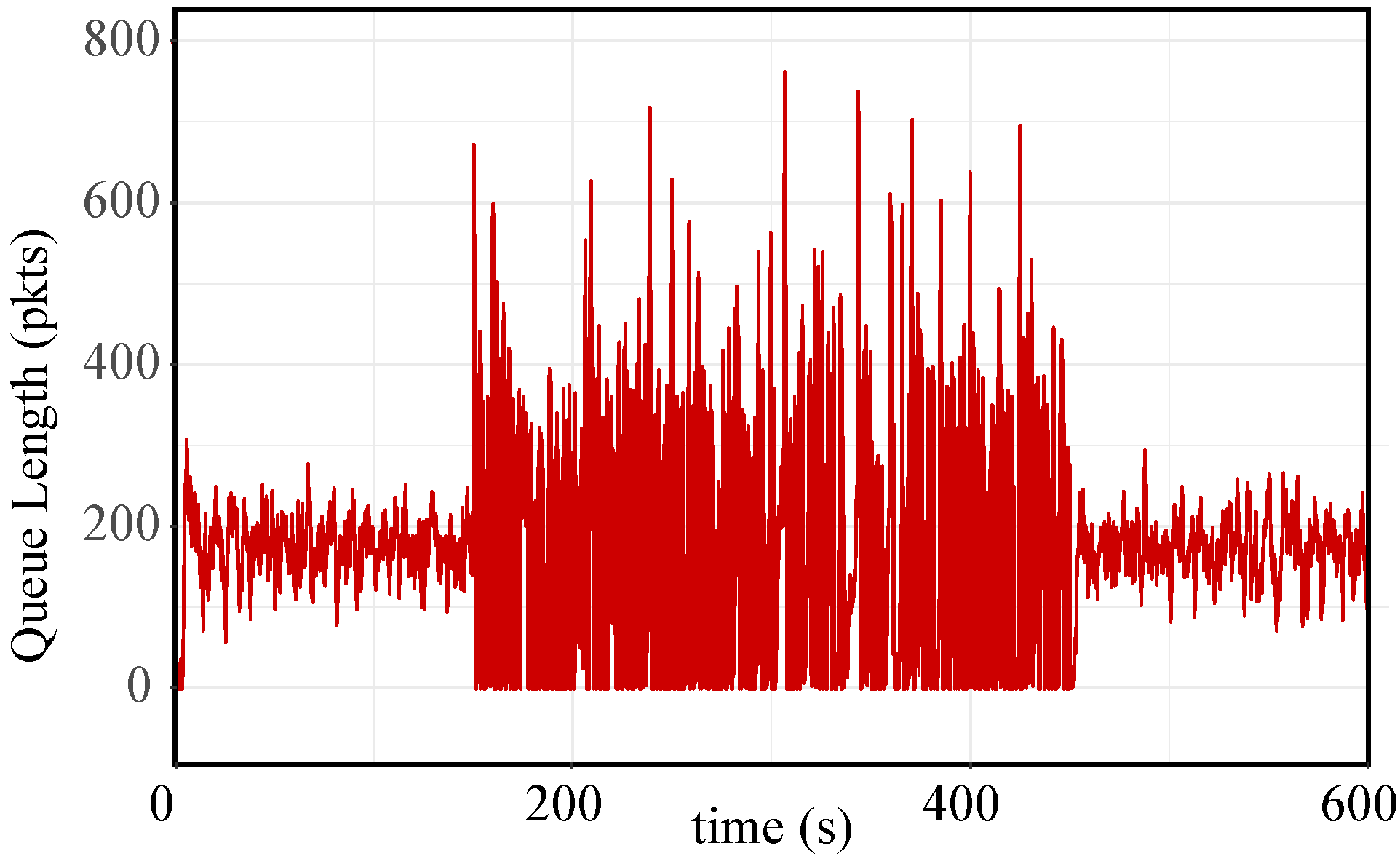
5.2. Real Traffic Replay Results and Discussion
5.3. Comparative Studies
5.3.1. The Luenberger Observer (LO)
5.3.2. The Conventional Sliding Mode Observer (CSMO)
5.3.3. The Super-Twisting Observer (STO)
5.3.4. The Terminal Sliding Mode Observer (TSMO)
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, Q.; Huang, W.; Luo, X.; Gong, Q.; Yu, F.R. A multi-level DDoS mitigation framework for the industrial internet of things. IEEE Commun. Mag. 2018, 56, 30–36. [Google Scholar] [CrossRef]
- Sarker, I.H.; Abushark, Y.B.; Alsolami, F.; Khan, A.I. Intrudtree: A machine learning based cyber security intrusion detection model. Symmetry 2020, 12, 754. [Google Scholar] [CrossRef]
- Zegzhda, D.; Lavrova, D.; Pavlenko, E.; Shtyrkina, A. Cyber attack prevention based on evolutionary cybernetics approach. Symmetry 2020, 12, 1931. [Google Scholar] [CrossRef]
- Faisal, M.A.; Aung, Z.; Williams, J.R.; Sanchez, A. Data-stream-based intrusion detection system for advanced metering infrastructure in smart grid: A feasibility study. IEEE Syst. J. 2015, 9, 31–44. [Google Scholar] [CrossRef]
- Yang, Y.; McLaughlin, K.; Sezer, S.; Littler, T.; Im, E.G. Multiattribute SCADA-specific intrusion detection system for power networks. IEEE Trans. Power Del. 2014, 29, 1092–1102. [Google Scholar] [CrossRef] [Green Version]
- Skybakmoen, T. Next Generation Firewall Comparative Analysis- Security; NSS Labs: Austin, TX, USA, 2014; pp. 1–20. [Google Scholar]
- Niu, Y.; Ho, D.W.C. Design of sliding mode control subject to packet losses. IEEE Trans. Autom. Control 2010, 55, 2623–2628. [Google Scholar] [CrossRef]
- Zhang, S.S.; Shang, W.L.; Wan, M.; Zhang, H.; Zeng, P. Security defense module of Modbus TCP communication based on region/enclave rules. Comput. Eng. Des. 2014, 35, 3701–3707. [Google Scholar]
- Misra, V.; Gong, W.; Towsley, D. Fluid-based analysis of a network of AQM routers supporting TCP flows with an application to RED. Comput. Commun. Rev. 2000, 30, 151–160. [Google Scholar] [CrossRef]
- Ariba, Y.; Gouaisbaut, F.; Labit, Y. Feedback control for router management and TCP/IP network stability. IEEE Trans. Netw. Service Manag. 2009, 6, 255–266. [Google Scholar] [CrossRef]
- Hollot, C.V.; Misra, V.; Towsley, D.; Gong, W. Analysis and design of controllers for AQM routers supporting TCP flows. IEEE Trans. Autom. Control 2002, 47, 945–959. [Google Scholar] [CrossRef] [Green Version]
- Ariba, Y.; Gouaisbaut, F.; Rahme, S.; Labit, Y. Traffic monitoring in transmission control protocol/active queue management networks through a time-delay observer. IET Control Theory Appl. 2012, 6, 506–517. [Google Scholar] [CrossRef]
- Cao, L.; Li, H.; Wang, N.; Zhou, Q. Observer-based event-triggered adaptive decentralized fuzzy control for nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 2018, 27, 1201–1214. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, X.; Chadli, M.; Xie, S.; Peng, Y. Sliding mode control of fuzzy singularly perturbed descriptor systems. IEEE Trans. Fuzzy Syst. 2020. early access. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Xu, L.; Restam, K.; Cao, Z. Finite-time continuous terminal sliding mode control of servo motor systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Fu, Z. Sliding-mode control of uncertain time-varying systems with state delays: A non-negative constraints approach. IEEE Trans. Syst. Man, Cybern. Syst. 2020. early access. [Google Scholar] [CrossRef]
- Xu, W.; Qu, S.; Zhao, L.; Zhang, H. An Improved Adaptive Sliding Mode Observer for Middle- and High-Speed Rotor Tracking. IEEE Trans. Power Electron. 2021, 36, 1043–1053. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Gao, J.; Wang, Y.; Yan, L. An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM. IEEE Trans. Ind. Electron. 2021, 67, 5913–5923. [Google Scholar] [CrossRef]
- Li, H.; Shi, P.; Yao, D. Adaptive Sliding-Mode Control of Markov Jump Nonlinear Systems with Actuator Faults. IEEE Trans. Autom. Control 2017, 62, 1933–1939. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, Y.; Karimi, H.R.; Shen, H.; Fang, Z. Sliding Mode Control of Fuzzy Singularly Perturbed Systems With Application to Electric Circuit. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 48, 1667–1675. [Google Scholar] [CrossRef]
- Rahme, S.; Labit, Y.; Gouaisbaut, F. Sliding mode observer for anomaly detection in TCP/AQM networks. In Proceedings of the IEEE Second International Conference on Communication Theory, Reliability, and Quality of Service (CTRQ’2009), Colmar, France, 20–25 July 2009; pp. 113–118. [Google Scholar]
- Rahme, S.; Labit, Y.; Gouaisbaut, F.; Floquet, T. Sliding modes for anomaly observation in TCP networks: From theory to practice. IEEE Trans. Control Syst. Technol. 2013, 21, 1031–1038. [Google Scholar] [CrossRef] [Green Version]
- Hou, H.; Yu, X.; Xu, L.; Chuei, R.; Cao, Z. Discrete-time terminal sliding-mode tracking control with alleviated chattering. IEEE ASME Trans. Mechatron 2019, 24, 1808–1817. [Google Scholar] [CrossRef]
- Hou, H.; Yu, X.; Fu, Z. Sliding mode control of networked control systems: An auxiliary matrices-based approach. IEEE Trans. Autom. Control 2021. early access. [Google Scholar] [CrossRef]
- Yang, H.; Yin, S. Reduced-Order Sliding-Mode-Observer-Based Fault Estimation for Markov Jump Systems. IEEE Trans. Autom. Control 2019, 64, 4733–4740. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, X.; Wu, X.; Tan, G.; Chen, X. Sensorless Control for IPMSM Based on Adaptive Super-Twisting Sliding-Mode Observer and Improved Phase-Locked Loop. Energies 2019, 12, 1225. [Google Scholar] [CrossRef] [Green Version]
- Zheng, W.; Xia, B.; Wang, W.; Lai, Y.; Wang, M.; Wang, H. State of Charge Estimation for Power Lithium-Ion Battery Using a Fuzzy Logic Sliding Mode Observer. Energies 2019, 12, 2491. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K.; Praly, L. High-gain observers in nonlinear feedback control. Int. J. Robust. Nonlinear Control. 2014, 24, 993–1015. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Valderrabano-Gonzalez, A.; Favela-Contreras, A.R.; Rosas-Caro, J.C. Active disturbance rejection control of a magnetic suspension system. Asian J. Control 2015, 17, 842–854. [Google Scholar] [CrossRef]
- Kim, K.S.; Rew, K.H.; Kim, S. Disturbance observer for estimating higher order disturbances in time series expansion. IEEE Trans. Autom. Control 2015, 17, 842–854. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- He, Y.; Wang, Q.; Linb, C.; Wua, M. Delay-range-dependent stability for systems with time-varying delay. Automatica 2007, 43, 371–376. [Google Scholar] [CrossRef]
- Hatzivasilis, G.; Fysarakis, K.; Soultatos, O.; Askoxylakis, I.; Demetriou, G. The Industrial Internet of Things as an enabler for a Circular Economy Hy-LP: A novel IIoT protocol, evaluated on a wind park’s SDN/NFV-enabled 5G industrial network. Comput. Commun. 2018, 119, 127–137. [Google Scholar] [CrossRef]
- Chuck, F.; Moon, S.; Lyles, B.; Cotton, C.; Khan, M.; Moll, D.; Rockell, R.; Seely, T.; Diot, S.C. Packet level traffic measurements from the sprint IP backbone. IEEE Netw. 2003, 17, 6–16. [Google Scholar]
- Jacobson, V.; Braden, R.T. TCP extensions for long-delay paths. Network Working Group Request for Comments: 1072. 1988. Available online: https://www.rfc-editor.org/info/rfc1072 (accessed on 17 May 2020).
- Appenzeller, G.; Keslassy, I.; McKeown, N. Sizing router buffers. Comput. Commun. Rev. 2004, 34, 281–292. [Google Scholar] [CrossRef]
- Stevens, W. TCP slow start, congestion avoidance, fast retransmit, and fast recovery algorithms. Network Working Group Request for Comments: 2001. 1996. Available online: https://datatracker.ietf.org/doc/html/rfc2001 (accessed on 17 May 2020).
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- The CAIDA UCSD “DDoS Attack 2007” Dataset. Available online: https://www.caida.org/data/passive/ddos-20070804_dataset.xml (accessed on 17 May 2020).
- Hollot, C.V.; Misra, V.; Towsley, D.; Gong, W. On designing improved controllers for AQM routers supporting TCP flows. In Proceedings of the IEEE INFOCOM’ 2001, Anchorage, AK, USA, 24–26 April 2001; Volume 3, pp. 1726–1734. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum capture length for interface | 0:65,000 |
|---|---|
| First timestamp: | 1,186,260,576.487629 |
| Last timestamp: | 1,186,260,876.482457 |
| Unknown encapsulation: | 0 |
| IPv4 bytes: | 37,068,253 |
| IPv4 pkts: | 166,448 |
| IPv4 traffic: | 8079 |
| Unique IPv4 addresses: | 136 |
| Unique IPv4 source addresses: | 132 |
| Unique IPv4 destination addresses: | 136 |
| Unique IPv4 TCP source ports: | 4270 |
| Unique IPv4 TCP destination ports: | 3348 |
| Unique IPv4 UDP source ports: | 1 |
| Unique IPv4 UDP destination ports: | 1 |
| Unique IPv4 ICMP type/codes: | 2 |
| Observers | LO | CSMO | STO | TSMO | |
|---|---|---|---|---|---|
| () | / | ||||
| () | / | Asymptoticaly | Asymptoticaly | ||
| () | ADE | ||||
| SDE | |||||
| () | ADE | ||||
| SDE | |||||
| () | ADE | ||||
| SDE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Xiong, W.; Zhou, M.; Chen, L. A Continuous Terminal Sliding-Mode Observer-Based Anomaly Detection Approach for Industrial Communication Networks. Symmetry 2022, 14, 124. https://doi.org/10.3390/sym14010124
Xu L, Xiong W, Zhou M, Chen L. A Continuous Terminal Sliding-Mode Observer-Based Anomaly Detection Approach for Industrial Communication Networks. Symmetry. 2022; 14(1):124. https://doi.org/10.3390/sym14010124
Chicago/Turabian StyleXu, Long, Wei Xiong, Minghao Zhou, and Lei Chen. 2022. "A Continuous Terminal Sliding-Mode Observer-Based Anomaly Detection Approach for Industrial Communication Networks" Symmetry 14, no. 1: 124. https://doi.org/10.3390/sym14010124
APA StyleXu, L., Xiong, W., Zhou, M., & Chen, L. (2022). A Continuous Terminal Sliding-Mode Observer-Based Anomaly Detection Approach for Industrial Communication Networks. Symmetry, 14(1), 124. https://doi.org/10.3390/sym14010124