2.1. Bézier Functions
BFs are implicit functions that can describe complicated curves and surfaces [
6,
25], and there are two types: NBFs and RBFs. The shape of curves is mainly ruled by the control points, but RBFs have additional factors that can control the shape of curves, which are weights that are associated with the control points. Both types of BFs are composed of Bernstein polynomials (BPs) and a set of control points (and additional weights for RBFs). BPs of degree
n is defined as [
26,
27]
where
is a binomial coefficient,
, and
is the implicit parameter. BPs have several properties as follows: [
26,
27,
28]
BPs and are mirror images of each other about the interval mid-point (i.e., );
there is the recurrent relation between BPs of degree and n as ;
they are non-negative as for ;
they form a partition of unity, ;
the derivative of BP is defined as ;
they are linearly independent, that is, ;
they can always be written as a linear combination of polynomials of higher degree, ; and,
they span the full space of polynomials. This means that any n-degree polynomial can be expressed as a linear combination of n-degree BPs.
Note that BPs are the parametric basis function of both NBFs and RBFs.
A NBF of degree
n is defined as [
8,
28]
where
is the
k-th control point. A set of control points (
number of points) is defined from
through
. The first and last control points (
and
) are called endpoints that indicate the start and end points of the curve. While the endpoints are located on the curve, the intermediate control points (
) do not lie on the curve [
29]. Instead, the intermediate control points mainly control the shape of the curve. Because the endpoints lie on each end of the curve, one or more intermediate control points are required to generate a curve. That is, at least a quadratic BF is needed to approximate a curve. The
r-th derivative of the NBF of degree
n with respect to
s is recursively defined as [
28]
where
An RBF of degree
n is defined as [
8,
28]
where
is the relative weight that is associated with
k-th control point. By adding the weights, the RBFs have more flexibility than the NBFs because the RBFs have more parameters to be adjusted. That is, the RBFs can closely approximate arbitrary curves by adjusting both the weights and the control points. In order to determine the derivative of the RBF, the numerator and denominator are redefined as
and
, and then Equation (
5) is rewritten as
. Subsequently, the
r-th derivative of the RBF of degree
n with respect to
s is recursively derived as [
28]
where the derivatives of
and
are obtained by using Equations (
3) and (
4).
2.3. Initial Guess Finder
An initial guess is required to solve the BVP using the shooting method, since the BVP generally provides the boundary values as initial conditions, as mentioned in
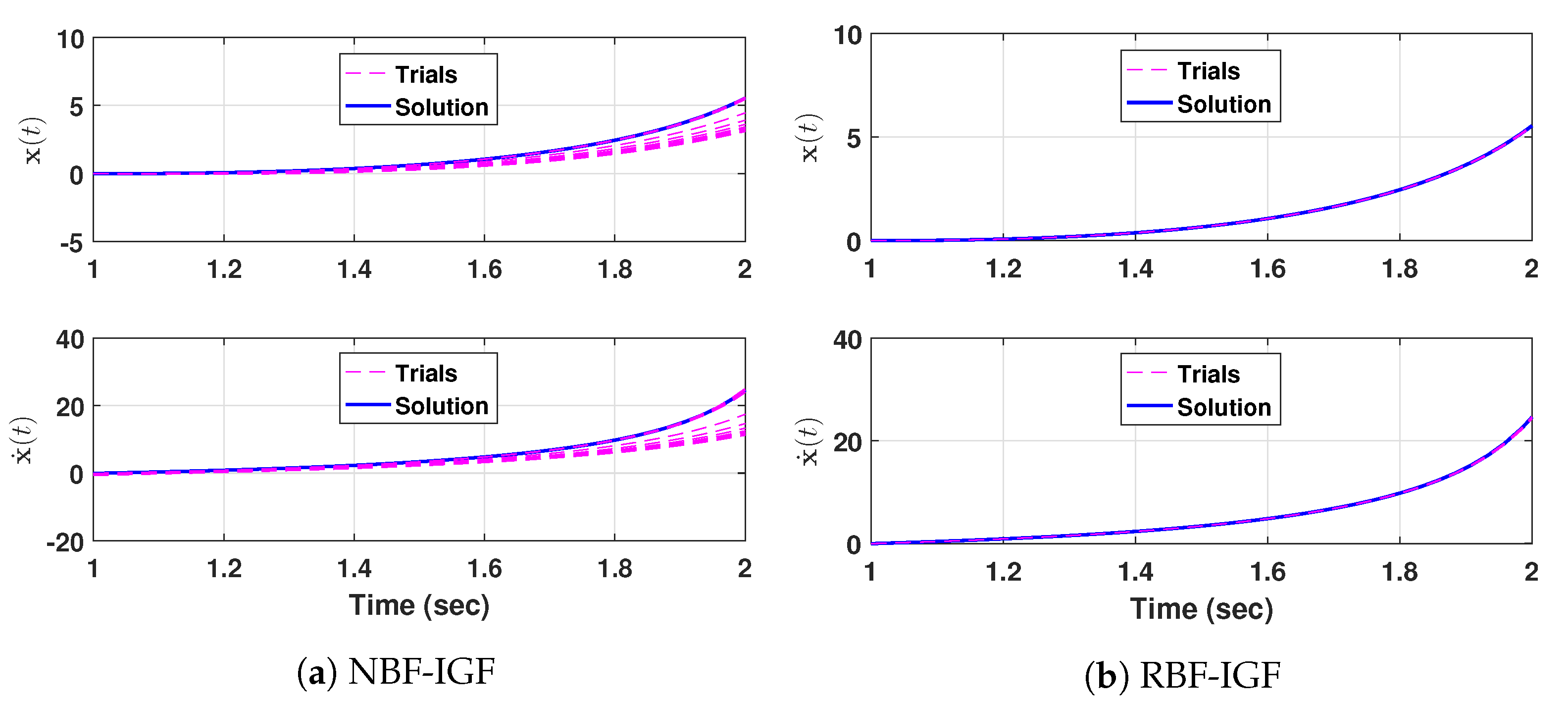
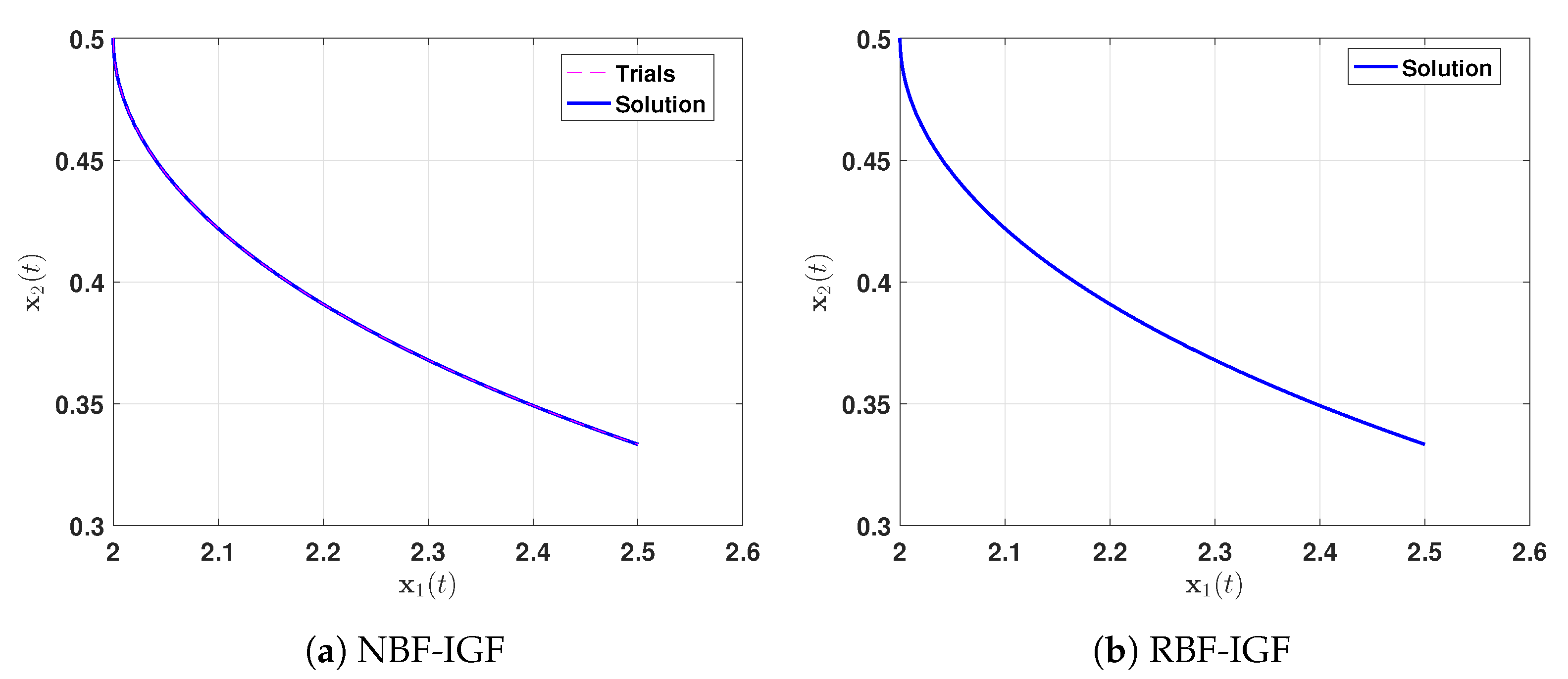
Section 2.2. That is, the trajectories of the states for the BVP should contain the boundary values at the end of the trajectories. Because the endpoints of BFs should lie on the curve similarly, one can say that the BCs correspond to the endpoints. From this concept, the given BVP can be approximated by BFs, and the initial guess is obtained from the approximated trajectory at the lower bound. This work considers two types of BFs to determine the initial guess in the initial guess finder (IGF). The first IGF uses the NBFs while the second one uses the RBFs, and they are named NBF-IGF and RBF-IGF, respectively.
For the NBF-IGF, it is necessary to transform the boundary values for the given BVP into the endpoints. That is, the initial and final time in the given problem are replaced with
and
, and the initial and final states are replaced with
and
in BFs. Note that the unknown intermediate control points are defined as
and
for
. Thus, the total number of unknown parameters for the NBF-IGF is
. Using Equation (
2),
t and
are transformed into NBFs, as follows:
For the RBF-IGF, it should consider additional unknown weights (
and
for
).
It is important to note that any endpoint weight values can be used because the intermediate weights are determined relatively. Thus, the weights corresponding to the endpoints can be defined as 1 for simplicity (i.e.,
for
), and the number of unknown weights is
. Hence, the total number of unknown parameters for the RBF-IGF is
. Using Equation (
5),
t and
are transformed into RBFs, as follows:
To express the corresponding nonlinear functions of the given BVP, the first and second time derivatives of
are derived as
where
s in each variable is omitted for the simple notation. Using Equations (
14) and (
15),
defined in Equation (
7) is transformed into BF form as
where
is the transformed nonlinear function that is composed of BFs. Here,
and
in the NBF-IGF are the function of
s,
, and
and
in the RBF-IGF are the function of
s,
,
,
,
. To obtain an approximated trajectory, the transformed residual should be zero in order to satisfy Equation (
7), and this is achieved by adjusting the unknown parameters. Once the unknown parameters are properly determined, the approximated trajectory can be easily found. Therefore, this becomes finding the proper unknown parameters that minimize the following cost function [
31]:
Note that the difference between the NBF-IGF and RBF-IGF arises in the first step that is the transformation of state variables,
and
, using Equations (
2) and (
5). Depending on the BFs, the number of unknown variables is different. Once the state variables are transformed into each BF, the following steps in Equations (
14)–(
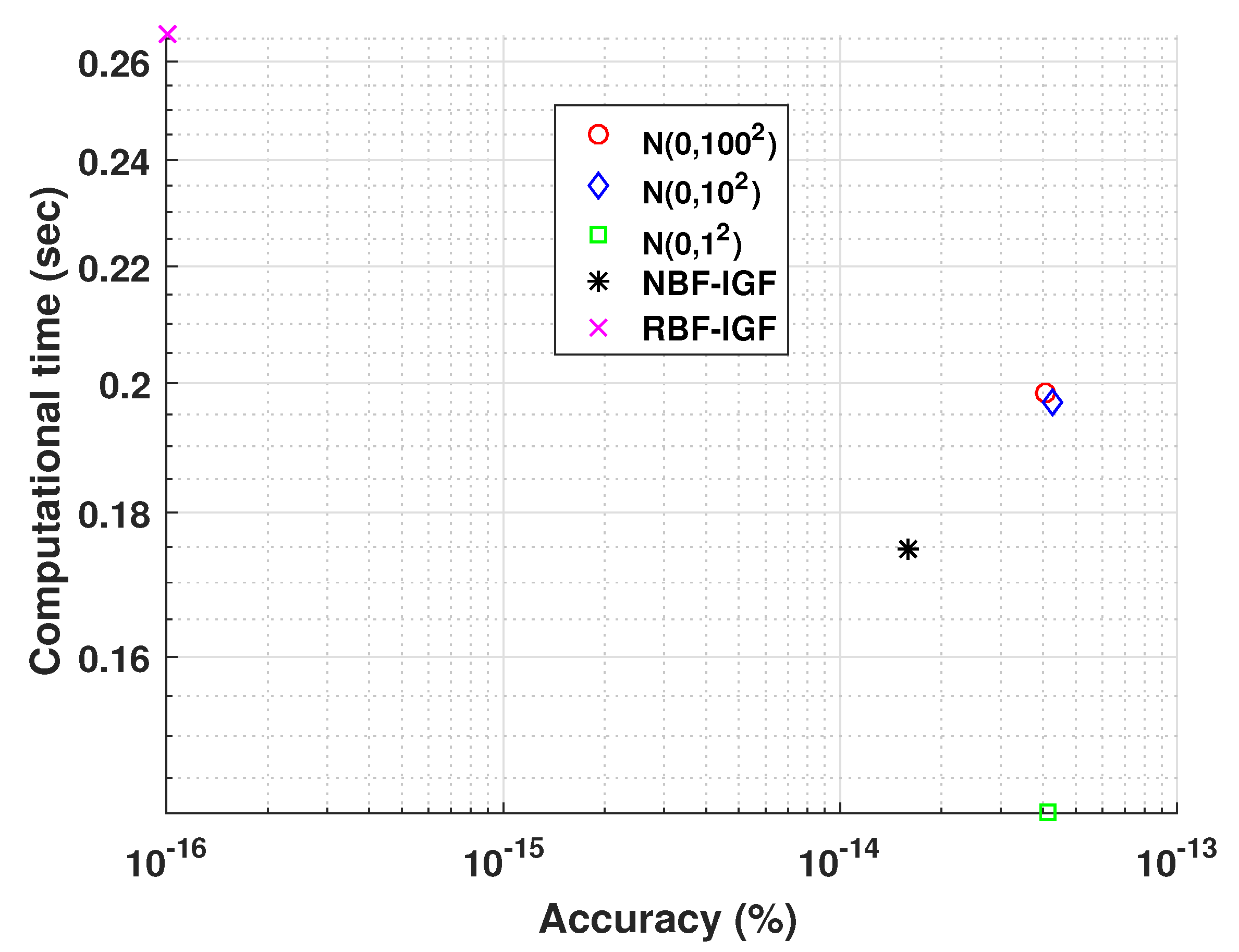
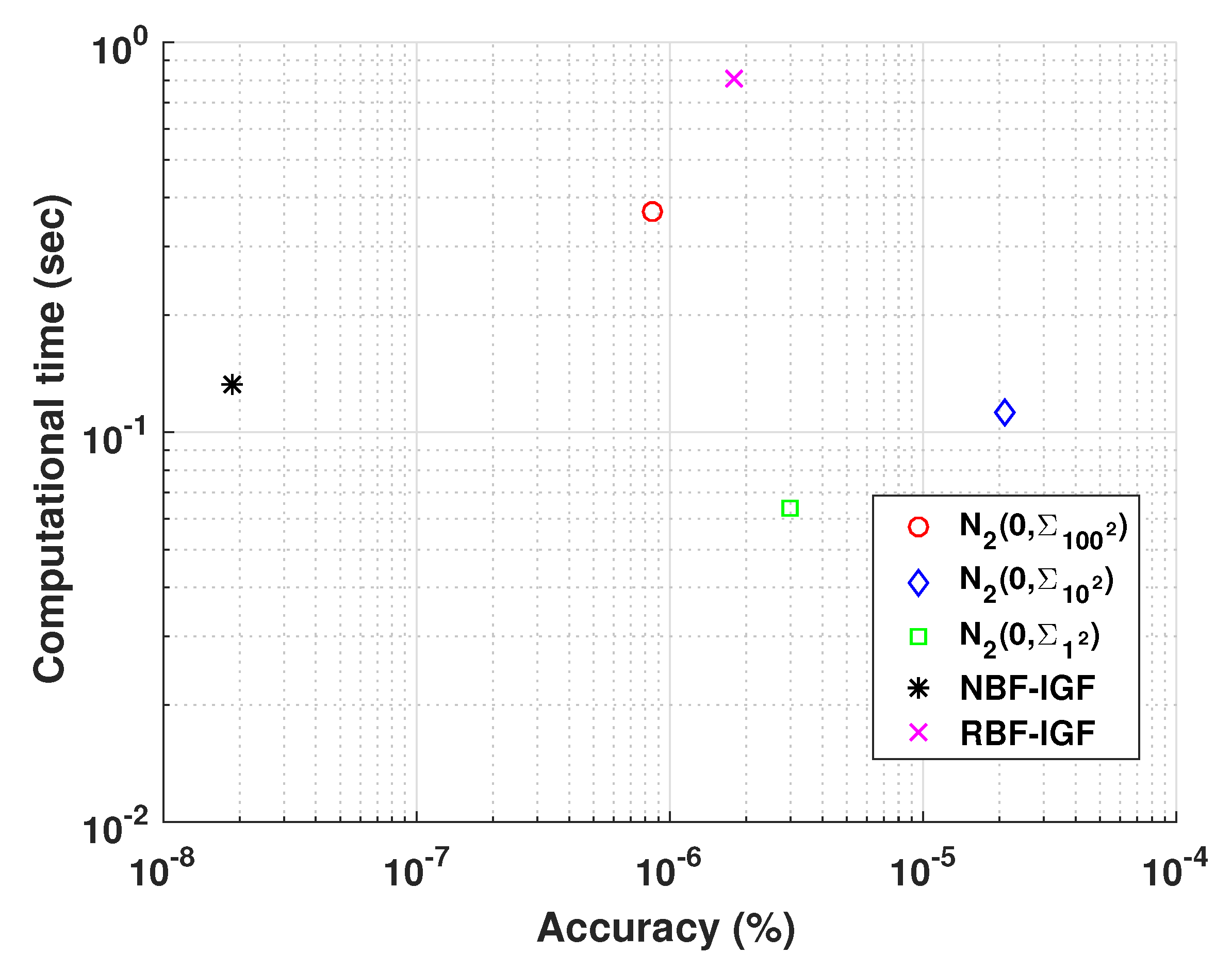
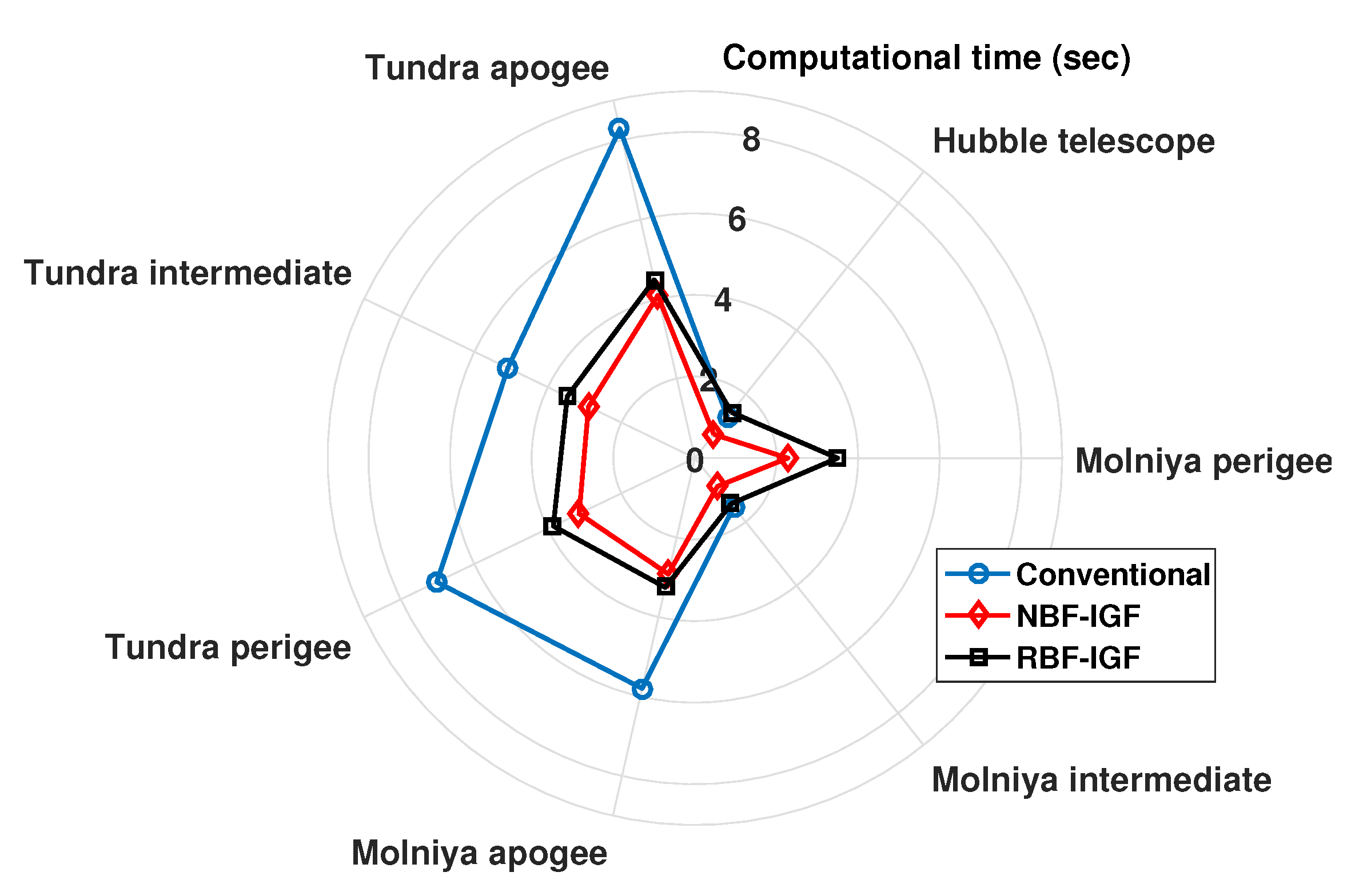
17) remain the same. It is evident that the RBF-IGF provides a more accurate initial guess, because it has parametric flexibility that can more precisely approximate a curve. However, it is computationally more expensive than the NBF-IGF.
Subsequently, this problem becomes to solve Equation (
17) with the unknown parameters and the following equations [
25]:
for
. Note that, if
is made of products only in Equation (
16),
becomes a polynomial equation in
s and Equation (
17) can be solved in a closed form [
25]. Once the obtained control points (and weights), which are the solution of the optimization problem, are applied to each state variable expressed as BFs, the approximated trajectory of the given BVP is found, and the initial guess for solving the given BVP is determined by
.
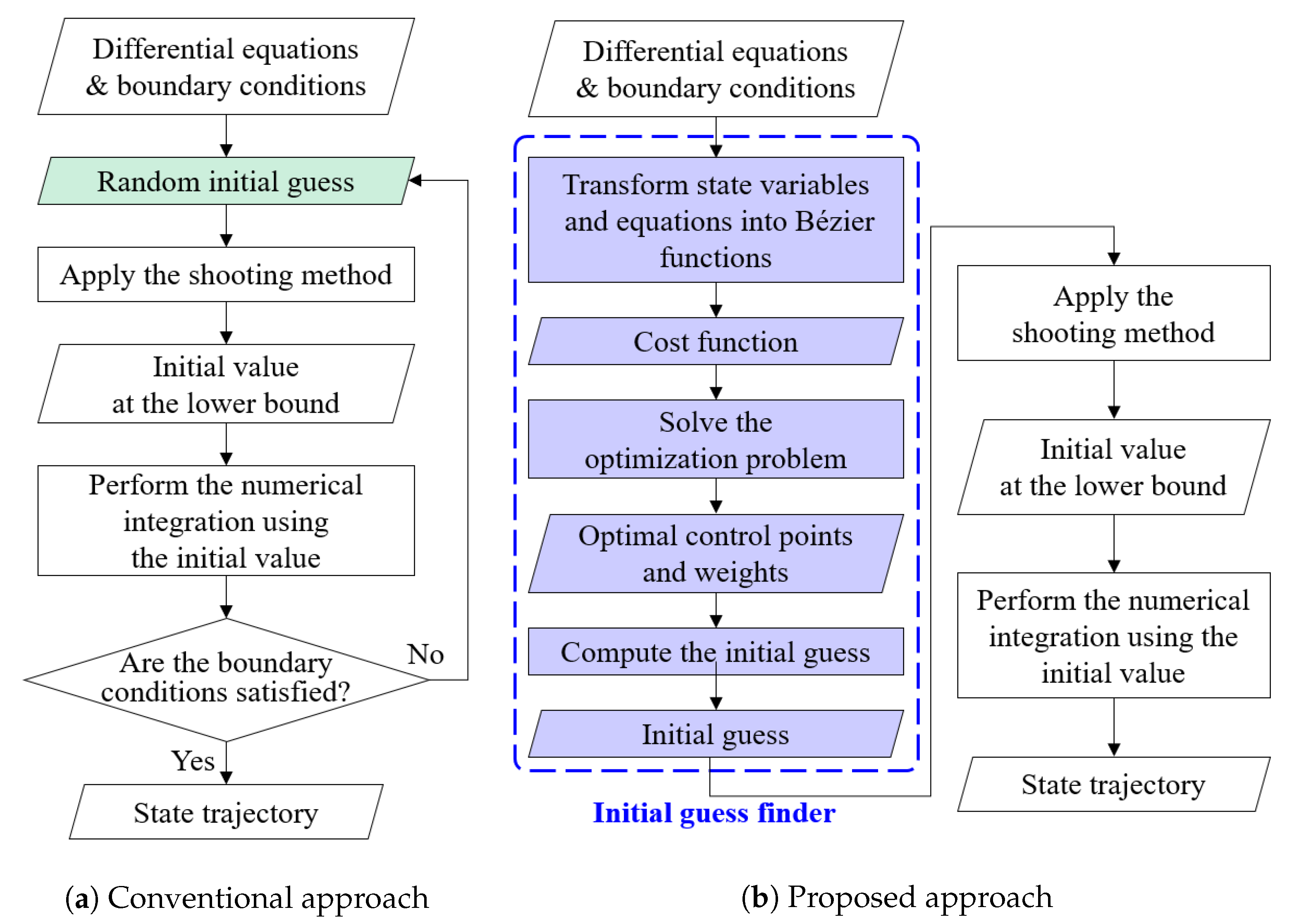
The given problem is generally solved by using the shooting method with random initial guesses because of the lack of information for the initial value, as shown in
Figure 1a. If a proper initial guess is selected, then the shooting method provides the initial value for the lower bound that satisfies the given BCs. Subsequently, the numerical integration is performed by using the obtained initial value to find the solution, which is the state trajectory. If the BCs are not satisfied for the obtained state trajectory, different initial guesses should be selected. In fact, many engineering problems are sensitive to initial guesses, and this makes engineers spend a huge effort to find the proper initial guess. The IGFs that were proposed in this work provide a proper initial guess, even for the problems that are sensitive to initial guesses because the information of initial guess is based on the approximated trajectory for the given problem.
Figure 1b shows the entire procedure for solving BVPs using the IGF that is highlighted with blue boxes. Initially, the state variables and equations are transformed into Bézier functions. Subsequently, the optimal control points and weights are obtained by solving the optimization problem that minimizes the cost function defined in Equation (
17). Finally, using the obtained control points and weights, the initial guess is computed and applied to the shooting method. In fact, the initial value is relatively easily and efficiently found by using the initial guess that is provided by the proposed approach as compared to using random initial guesses. As shown in
Figure 1a, the conventional approach iteratively selects random initial guesses to find the proper solution if the obtained states at the final time do not satisfy the BCs. On the other hand, replacing the green box shown in
Figure 1a with the dashed blue box in
Figure 1b eliminates such an iterative process.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}