1. Introduction
In recent years, with the increase in the use of electric vehicles, the traffic safety problems caused by them have also increased, and the failure of vehicle motors is an important factor that causes hidden dangers in electric vehicles. Vehicle motor failure will not only cause damage to electric vehicles and threaten the safe operation of electric vehicles, but the additional downtime caused by motor failures will also cause huge economic losses [
1]. IPMSM has the advantages of high efficiency, high power density, high reliability, and convenient maintenance, and is widely used in electric vehicles [
2]. Therefore, the development of IPMSM fault diagnosis and monitoring technology to realize fault warning has an important application value.
Based on the relevant literature on motor fault diagnosis at home and abroad, the current motor fault diagnosis methods can be mainly summarized into three categories: model-based, data-driven, and knowledge-based methods [
3]. Among them, the model-based method needs to establish, first, the mathematical model of the faulty motor. The modeling methods can be based on the classic state estimation or process parameter estimation method, on the equivalent magnetic circuit method, on the winding function and the improved winding function method [
4], on the finite element method, and so on [
5,
6]. The basis of this method is an accurate mathematical model of the motor, and a fault analysis is performed on the basis of the model. The advantage is that it goes deep into the nature of motor operation, but the disadvantage is that it must rely on an accurate mathematical model of the motor. However, the mathematical model of the motor is affected by various factors, such as the non-linearity of the iron core, the working environment, etc., so that it is difficult to establish. Therefore, the accuracy of their diagnosis results is not high, and the realization of the diagnosis technology is also difficult. The second method is data-driven, avoiding the problem of the mathematical model of the diagnostic object to a certain extent. At present, the methods that have been successfully applied to motor fault diagnosis based on data driving include: (1) the spectrum analysis method of stator current [
7], (2) the park vector method [
8], (3) the instantaneous power decomposition method [
9], (4) the wavelet analysis method [
10], (5) the high frequency signal injection method [
11], (6) and a method based on vibration signal spectrum analysis [
12]. However, to adopt these methods, the designer needs to have a wealth of prior knowledge in signal processing and expertise in fault diagnosis. The third method is a knowledge-based method, which has been widely used over the years, mainly due to the development of various artificial intelligence algorithms in various fields, such as aircraft [
13,
14], transportation [
15], and agriculture [
16] and many other fields. At present, knowledge-based motor fault diagnosis methods mainly include the following: (1) diagnosis methods based on fuzzy logic; (2) fault diagnosis methods based on expert systems; (3) diagnosis methods based on artificial neural networks [
17]. Compared with expert systems, artificial neural networks do not need to construct a knowledge base and an inference engine. They only need a large number of examples of training and to fix the parameters of the neural network to complete the fault diagnosis of the motor.
In recent years, many mechanical faults have been diagnosed based on vibration signal analysis using artificial neural networks and support vector machines [
18]. The literature [
19,
20,
21] proposed DTS-CNN, adaptive DCNN and TICNN, respectively, which are realized by processing motor vibration signals. One study [
22] uses CNN to realize the fault classification of the rotating machinery, including bearings with mildly insufficient lubrication, bearings with insufficient lubrication and damage to the outer ring of the bearing. Another study [
23] inputs the FFT amplitude of the motor current and the detailed parameters of the wavelet transform into the one-dimensional CNN for learning, which is used to diagnose PMSM demagnetization faults and bearing faults. Tamilselvan and Wang proposed a new multi-sensor health diagnosis method in [
24]. This method uses a deep belief network based on a restricted Boltzmann machine and trains each layer as a deep network structure, one by one. Although the above-mentioned intelligent diagnosis method based on vibration signal analysis can achieve good results in fault diagnosis, it is a complicated process to eliminate background noise. In addition, vibration measurement is also affected by the installation position of the sensor, and installing the sensor on the motor will also bring additional costs. Electric vehicles are prone to bumps and jitters during driving, which will affect the sensors that measure vibration signals, thereby affecting the reliability of motor fault diagnosis. Therefore, this study proposes an IPMSM fault diagnosis method based entirely on the time-domain signal of the motor stator current to monitor the faults of the IPMSM under the working conditions of electric vehicles.
The main contributions of this article are:
(1) The current signal is used for motor fault diagnosis. In terms of cost, there is no need to add sensors other than the motor drive system, which reduces the use of components. In terms of diagnostic performance, it can reduce the influence of background noise and other mechanical interference, and make the diagnostic method more reliable.
(2) The neural network is applied to the fault diagnosis of IPMSM. Compared with the traditional fault diagnosis method, this method does not need to rely on precise motor mathematical models, nor does it require researchers to have a rich prior knowledge and professional knowledge.
(3) In the traditional convolutional neural network, jump connection and spatial pyramid pooling (SPP) are added to enhance the feature extraction ability of the model and improve the accuracy of motor fault diagnosis.
The rest of this article is arranged as follows:
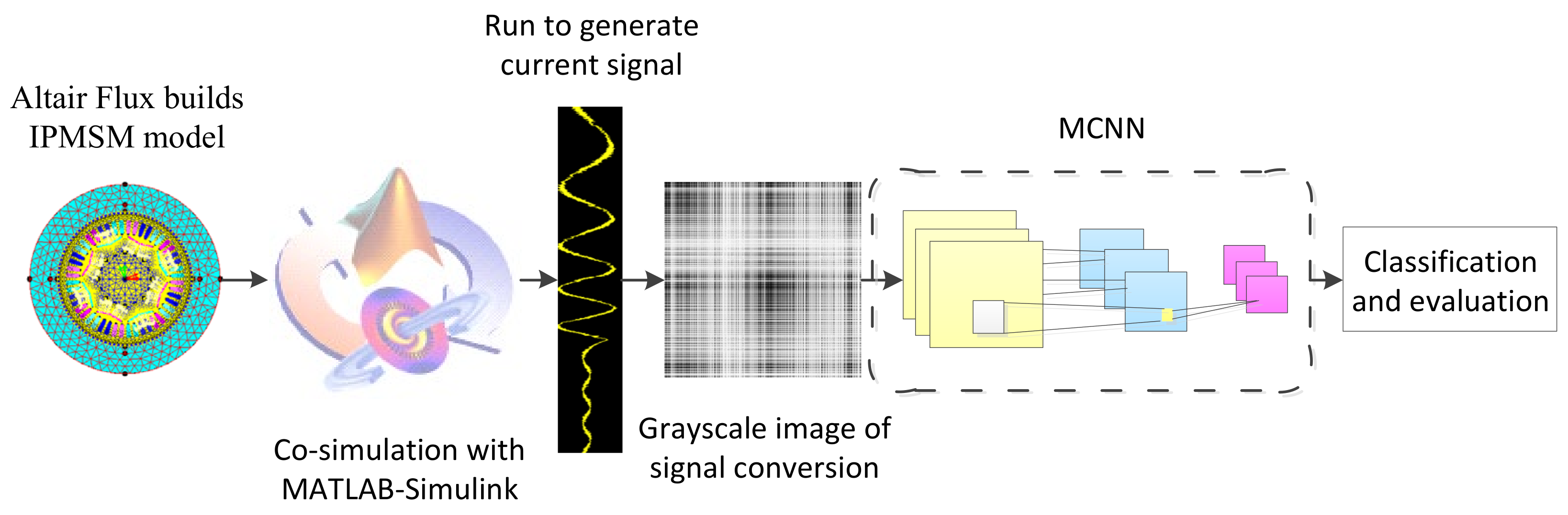
Section 2 introduces the construction of symmetric and asymmetric IPMSM models on the finite element software Altair Flux, and a co-simulation with MATLAB;
Section 3 compares several image conversion methods to convert the current signal into a grayscale image to obtain data;
Section 4 describes the neural network architecture used in this article;
Section 5 mainly introduces the training process and performance analysis of the built neural network;
Section 6 presents the conclusions. The overall flow chart of the entire experiment is shown in
Figure 1.
2. Establish a Faulty IPMSM Simulation System Based on Altair Flux and MATLAB
Altair Flux is a finite element modeling software, which is normally used for the modeling and simulation of magnetic, electrical, and thermal fields [
25]. Flux is widely used in the field of motor design, in DC motors, induction motors, synchronous motors, etc. In addition, Flux’s manager also integrates a material manager, a unit manager, and some common system options. The process of using Flux to build a motor model can be divided into the following four parts:
- (1)
Establish a geometric model of the motor;
- (2)
Set the physical properties, including material setting, external circuit design, and mechanical property setting;
- (3)
Set the solution parameters and solve the model;
- (4)
To process the solution results, Flux saves a corresponding file for each step of the solution state. To obtain the solution results of each parameter, you need to perform “post-processing” to visualize or save the results.
Motor faults can be divided into three main categories [
26]: electrical faults, mechanical faults, and magnetic faults. In this study, the eccentric fault in the mechanical fault category and the demagnetization fault in the magnetic fault category are taken as examples, and the neural network is used to diagnose these two faults.
Taking into account the structural characteristics of the electric vehicle machine, this article refers to the geometric parameters of the hybrid energy vehicle motor in the Flux official tutorial, and redesigns the electrical, mechanical, and permanent magnet structure of the motor on the basis of the original parameters. In this study, an 8-pole, 48-slot IPMSM geometric model is established, and its size specifications are shown in
Table 1.
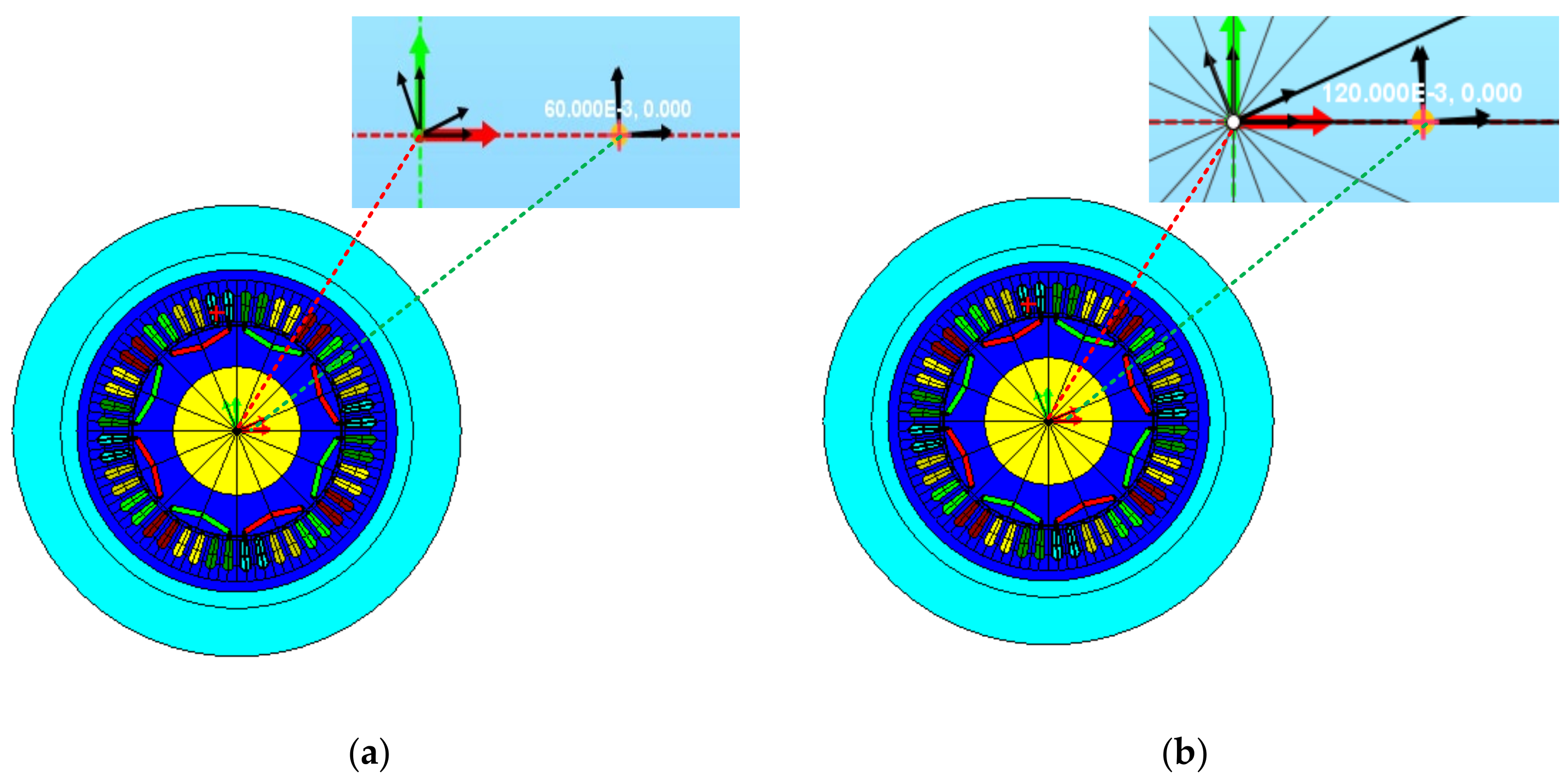
2.1. Modeling the Static Eccentric Fault Motor
Because the motor with eccentric fault is an asymmetric structure, the complete geometric structure of the motor body needs to be designed when the motor with eccentric fault is built in Flux. Therefore, when establishing the IPMSM geometric model, you need to select “With Eccentricity” at the air gap setting. The rotation center of the IPMSM rotor can be set in the mechanical properties to further determine the type of eccentricity fault of the IPMSM. By changing the center coordinates of the motor stator, this study establishes IPMSM with 10% and 20% static eccentricity faults.
As shown in
Figure 2a, the stator center coordinates Or and the rotor axis coordinates Os of the 10% eccentric IPMSM are set to (0.06,0) and (0,0), respectively, so that |OsOr| is 0.06 mm (uniform air, the gap length is 0.6 mm);
Figure 2b shows that the stator and rotor axis of a 20% eccentric IPMSM are set to (0.12,0) and (0.0), respectively, so that |OsOr| is 0.12 mm. Then, in the mechanical properties, set the rotor rotation center to (0.0) so that the rotor rotation center and the rotor axis coincide.
2.2. Demagnetization Fault IPMSM Modeling
The neodymium boron (NdFeB) permanent magnet is currently the material of choice for permanent magnet synchronous motors. Compared with other types of magnets, it has a better energy density and a lower cost, but its magnetization will be affected by the working conditions. After demagnetization occurs, it is irreversible and will increase with time. IPMSM for electric vehicles often works in a high-temperature environment with a small space, so demagnetization is prone to occur. The built-in installation method makes the permanent magnets less susceptible to vehicle shaking and damage. Therefore, in the working condition of electric vehicles, the demagnetization of permanent magnets is mostly uniform demagnetization [
27]. This study also mainly analyzes the uniform demagnetization failure of IPMSM.
In Flux, NdFeB permanent magnets can be defined by “Linear magnetic described by the Br module”. Set the value in “Remanent flux density” to define the remanence of permanent magnet materials; set “Relative permeability” to define the slope of the magnetic curve. In order to establish an IPMSM model for permanent magnets with different degrees of demagnetization failures on pole pairs, this study defines three magnetic curves, which are the magnetic curves of normal, 25%, and 50% demagnetized materials.
As shown in
Figure 3, the remanence Br of the normal permanent magnet is set to 1.2 T, and the permeability is set to 1.05. The remanence Br of 25% and 50% demagnetization permanent magnets is set at 0.9 T and 0.6 T, respectively, while the permeability remains unchanged, and the coercivity increases correspondingly.
Figure 4a–c show the magnetic density distribution diagrams of the normal, demagnetized, 25%, and 50% demagnetized IPMSM permanent magnets. The magnetic density distribution of the permanent magnet in the left column of the picture shows that the degree of demagnetization is deeper when the magnetic density distribution becomes sparser.
2.3. Design of the IPMSM Coupling Circuit
In addition to the geometric model, the coupling circuit between the external power supply circuit and the electrical components in the motor body is also an important part of IPMSM.
Figure 5 shows the circuit diagram of the coupling circuit embedded in the motor body. The IPMSM winding connection shape adopts a Y connection, VA, VB, VC, and the internal resistance R constitute a three-phase controllable power supply, which can be controlled by an external power supply circuit to input the voltage vector of the motor; AC Coil P&N represents the two parts of the single-phase winding. The direction of one part needs to be set to be opposite to the current, and the number of turns of each winding is 104.
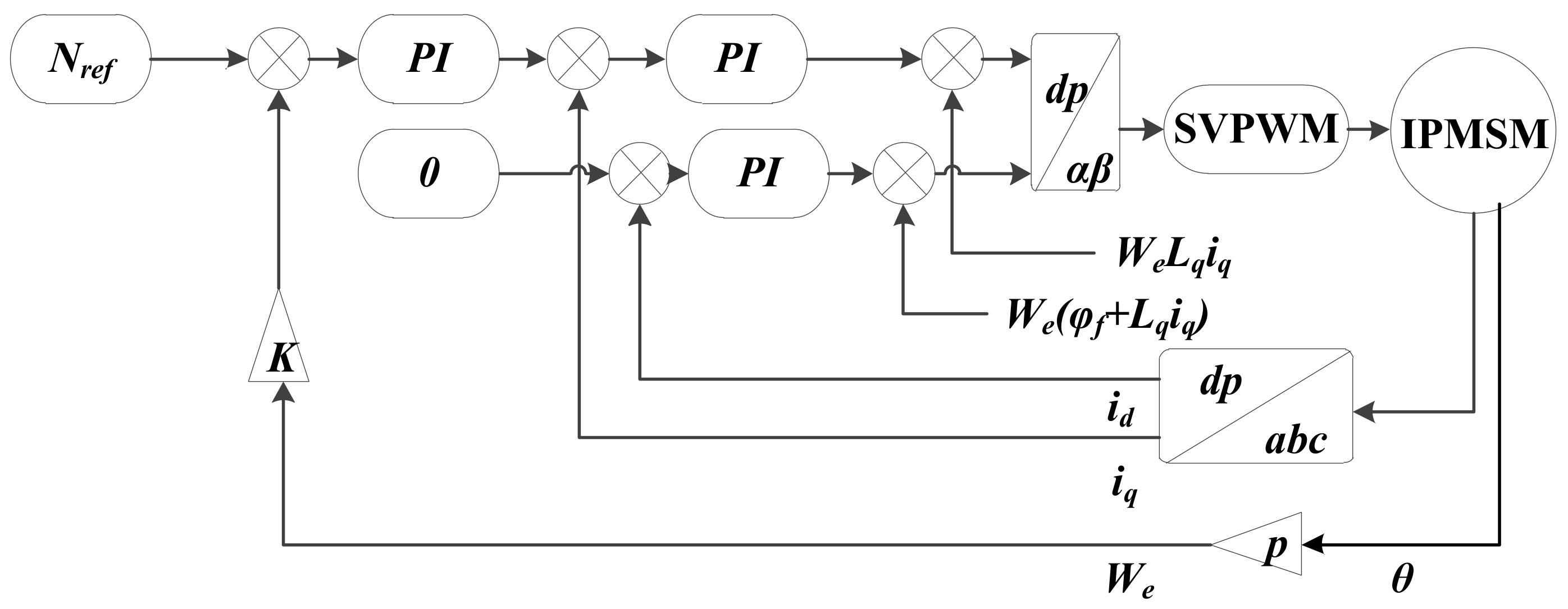
2.4. Co-Simulation
In this study, combining the accuracy of the finite element model and the convenience of the MATLAB control algorithm, the IPMSM finite element model established by Altair Flux is embedded into the vector control system in the MATLAB-Simulink environment, and then a real-time simulation is performed in the loop. The current strategy in the vector control system uses
id = 0, and the space vector pulse width modulation (SVPWM) algorithm is used to modulate the motor supply voltage vector. The control system block diagram is shown in
Figure 6.
Figure 7 shows the IPMSM finite element model-in-the-loop simulation system of Altair Flux and MATLAB-Simulink co-simulation.
The IPMSM model and the normal IPMSM model of the four fault categories are jointly simulated. There are eight operating processes for each motor model during the simulation, as shown in
Table 2.
Figure 8 shows the simulation results of normal, demagnetized 25%, and 50% demagnetized IPMSM at a given speed of 4000 rpm and a load of 0N.m.
Figure 8a–c are the three-phase current simulation results of the three types of motors. It can be seen that the demagnetization fault has a certain effect on the current. The greater the degree of demagnetization, the longer the adjustment time required for the phase current to enter the steady state.
Figure 8d is a comparison of the speeds of three types of motors. It can be seen that the speed of the motors with demagnetization faults needs more time to stabilize than that of the normal motors.
Figure 8e is the comparison of the electromagnetic torque. From the directly distinguishable characteristics, the dynamic process becomes longer with the increase of the fault intensity, just like the influence on current and speed; and the greater the degree of demagnetization, the smaller the electromagnetic torque. It can be seen that the demagnetization failure reduces the output torque of the motor, which is equivalent to increasing the motor load, which increases the time from the start of the motor to the stable speed.
Figure 9 shows the simulation results of a normal IPMSM with 10% eccentricity and 20% eccentricity at a given speed of 4000 rpm and a load of 0N.m.
Figure 9a–c are the simulation results of three-phase stator currents of three types of motors,
Figure 9d is the comparison of three types of motor speed, and
Figure 9e is the comparison of the electromagnetic torque. From
Figure 9a–e, it can be seen that the pure static eccentricity fault has very little effect on the motor, and the three-phase current, speed, and electromagnetic torque trend of the normal, eccentric 10%, and eccentric 20% IPMSM stators are basically the same.
6. Conclusions
This study proposed a permanent magnet synchronous motor fault diagnosis method based on an improved convolutional neural network:
(1) Since a physical platform for permanent magnet synchronous motor demagnetization and eccentricity faults has a high cost, a simulation platform was built on the finite element software Altair Flux and MATLAB-Simulink to conduct joint simulations to obtain IPMSM fault current data.
(2) In view of the fact that there are many influencing factors based on the vibration signal analysis method and that the cost is relatively high, the diagnosis method in this study is completely based on the time domain signal of the stator current of the motor, and the reliability is higher.
(3) Aiming at the fact that traditional motor fault diagnosis methods require high motor mathematical models and professional knowledge of R&D personnel, this study constructs an improved convolutional neural network for IPMSM fault diagnosis.
Experimental results demonstrate that the use of jump connections and spatial pyramid pooling (SPP) enhances the feature extraction capabilities of the model. Compared with traditional shallow learning algorithms and CNN models, the model proposed in this study can effectively improve the motor fault diagnosis capabilities.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}