Threshold Analysis and Stationary Distribution of a Stochastic Model with Relapse and Temporary Immunity



{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Existence and Uniqueness of the Global Positive Solution
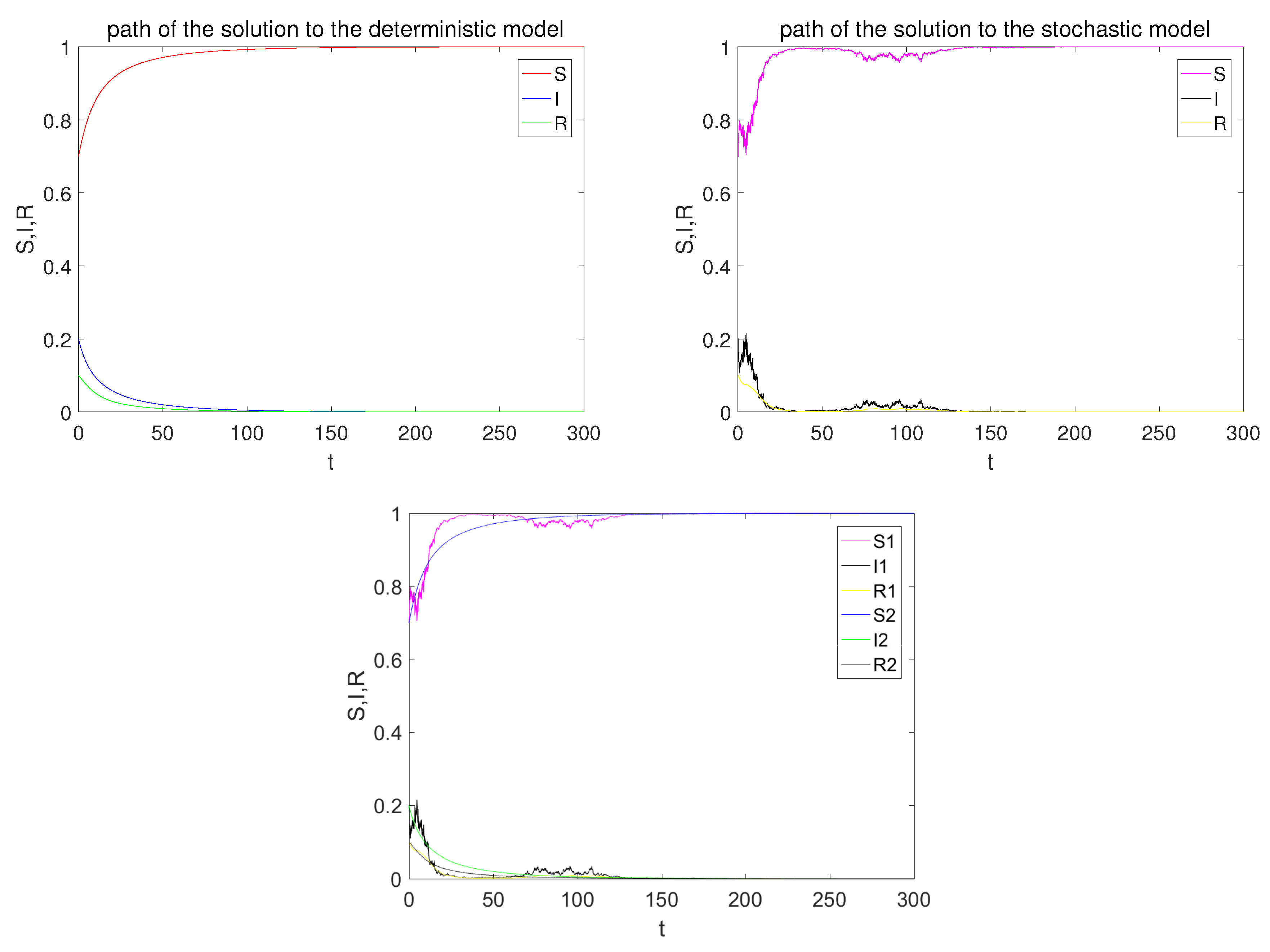
3. Extinction of the Disease
4. Persistence in the Mean
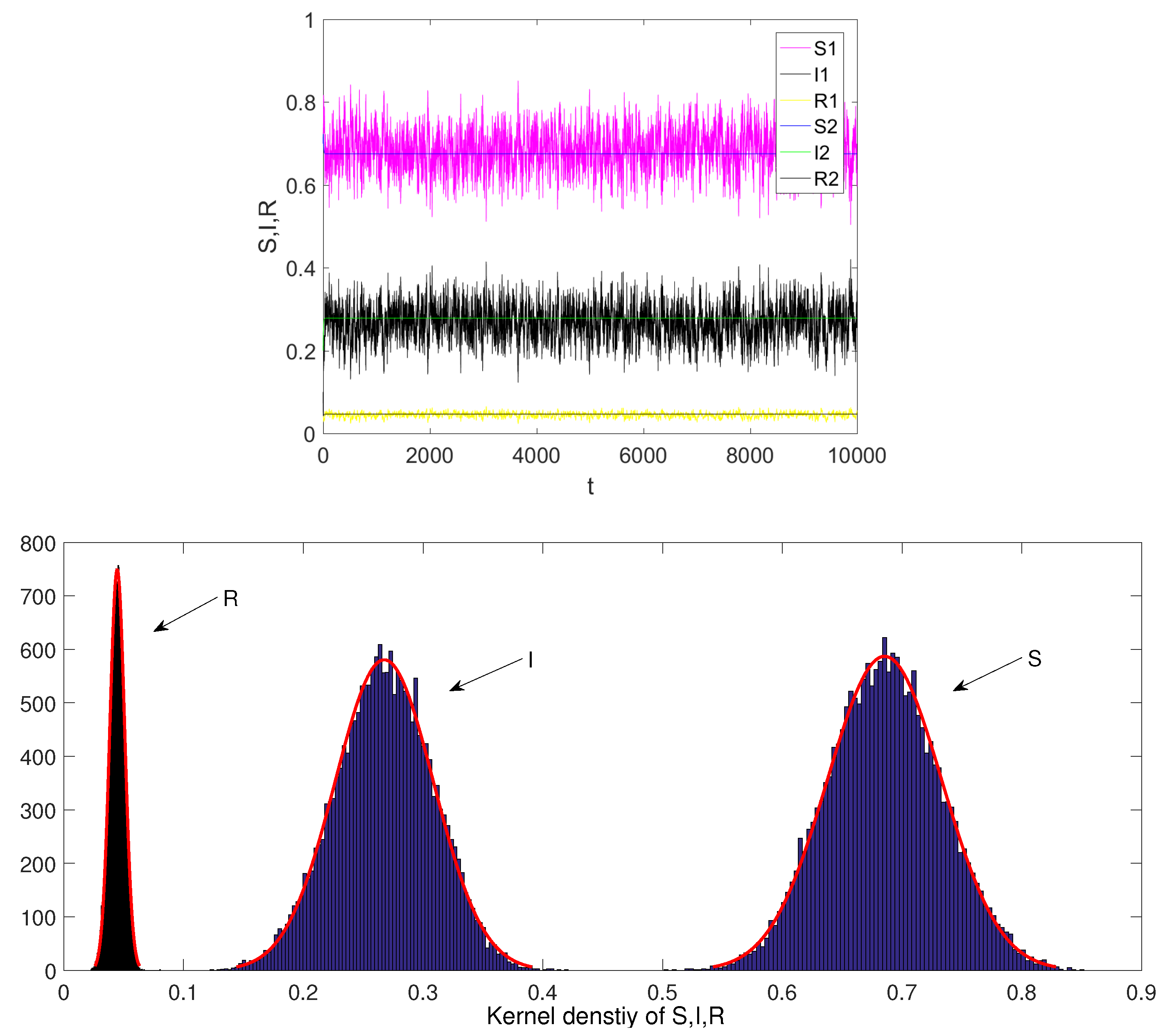
5. Existence of a Stationary Distribution
- If . In this case, we choose and a to be sufficiently small, such that
- If and , we choose to be sufficiently small, such that
- If and , we choose to be sufficiently close to 1, such that
- If and , we choose to be sufficiently close to 1 and a to be sufficiently small, such that
6. Numerical Simulations
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Anderson, R.; May, R.; Medley, G. A preliminary study of the transmission dynamics of the human immunodeficiency virus (HIV), the causative agent of AIDS. IMA J. Math. Appl. Med. Biol. 1986, 3, 229–263. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.E.; Zhou, Y.C.; Wu, J.H. Modeling and Dynamics of Infectious Diseases; Higher Education Press: Beijing, China, 2009. [Google Scholar]
- Herbert, H.W. The mathematics of infectious diseases. SIAM Rev. 2000, 42, 599–653. [Google Scholar]
- Brauer, F.; Chavez, C.C. Mathematical Models in Population Biology and Epidemiology; Springer: New York, NY, USA, 2001. [Google Scholar]
- Liu, K.Y.; Zhang, T.Q.; Chen, L.S. State-dependent pulse vaccination and therapeutic strategy in an SI epidemic model with nonlinear incidence rate. Comput. Math. Methods Med. 2019, 2019, 3859815. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.C.; Liu, J.L.; Chi, M.N.; Bian, F.F. Dynamics analysis of stochastic epidemic models with standard incidence. Adv. Differ. Equ. 2019, 2019, 22. [Google Scholar] [CrossRef]
- Qi, H.K.; Leng, X.N.; Meng, X.Z.; Zhang, T.H. Periodic Solution and Ergodic Stationary Distribution of SEIS Dynamical Systems with Active and Latent Patients. Qual. Theory Dyn. Syst. 2019, 18, 347–369. [Google Scholar] [CrossRef]
- Wang, X.H.; Wang, Z.; Shen, H. Dynamical analysis of a discrete-time SIS epidemic model on complex networks. Appl. Math. Lett. 2019, 94, 292–299. [Google Scholar] [CrossRef]
- Korobeinikov, A. Lyapunov functions and global stability for SIR and SIRS epidemiological models with nonlinear transmission. Bull. Math. Biol. 2006, 30, 615–636. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.Q.; Hayat, T.; Alsaedi, A. Threshold behavior in a stochastic delayed SIS epidemic model with vaccination and double diseases. J. Franklin Inst. 2019, 356, 7466–7485. [Google Scholar] [CrossRef]
- Meng, X.Z.; Zhao, S.N.; Feng, T.; Zhang, T.H. Dynamics of a novel nonlinear atochastic SIS epidemic model with double epidemic hypothesis. J. Math. Anal. Appl. 2016, 433, 227–242. [Google Scholar] [CrossRef]
- Chang, Z.B.; Meng, X.Z.; Zhang, T.H. A new way of investigating the asymptotic behaviour of a stochastic SIS system with multiplicative noise. Appl. Math. Lett. 2019, 87, 80–86. [Google Scholar] [CrossRef]
- Gao, N.; Song, Y.; Wang, X.Z.; Liu, J.X. Dynamics of a stochastic SIS epidemic model with nonlinear incidence rates. Adv. Differ. Equ. 2019, 2019, 41. [Google Scholar] [CrossRef]
- Fatini, M.E.; Khalifi, M.E.; Gerlach, R.; Laaribi, A.; Taki, R. Stationary distribution and threshold dynamics of a stochastic SIRS model with a general incidence. Phys. A 2019, 534, 120696. [Google Scholar] [CrossRef]
- Song, Y.; Miao, A.Q.; Zhang, T.Q. Extinction and persistence of a stochastic SIRS epidemic model with saturated incidence rate and transfer from infectious to susceptible. Adv. Differ. Equ. 2018, 2018, 293. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.Q.; Hayat, T.; Alsaedi, A. Threshold dynamics of a stochastic SIS epidemic model with nonlinear incidence rate. Phys. A 2019, 526, 120946. [Google Scholar] [CrossRef]
- Tudor, D. A deterministic model for herpes infections in human and animal polulations. SIAM Rev. 1990, 32, 130–139. [Google Scholar] [CrossRef]
- Zhang, W.W.; Meng, X.Z.; Dong, Y.L. Periodic Solution and Ergodic Stationary Distribution of Stochastic SIRI Epidemic Systems with Nonlinear Perturbations. J. Syst. Sci. Complex. 2019, 32, 1104–1124. [Google Scholar] [CrossRef]
- Blower, S. Modeling the genital herpes epidemic. Herpes 2004, 11 (Suppl. 3), 138A. [Google Scholar]
- Ding, S.S.; Wang, F.J. Sili epidemiological model with nonlinear incidence rates. J. Biomath. 1994, 9, 1–59. [Google Scholar]
- Dorodnitsyn, V. Applications of Lie Groups to Difference Equations; Chapman and Hall/CRC: Boca Raton, FL, USA, 2010. [Google Scholar]
- Stephani, H. Differential Equations: Their Solution Using Symmetries; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Rudnicki, R. Long-time behaviour of a stochastic prey-predator model. Stoch. Proc. Appl. 2003, 108, 93–107. [Google Scholar] [CrossRef]
- Rudnicki, R.; Pichor, K. Influence of stochastic perturbation on prey-predator systems. Math. Biosci. 2007, 206, 108–119. [Google Scholar] [CrossRef]
- Bell, D.R. The Malliavin Calculus; Dover Publications: New York, NY, USA, 2006. [Google Scholar]
- Qi, H.K.; Meng, X.Z.; Chang, Z.B. Markov semigroup approach to the analysis of a nonlinear stochastic plant disease model. Electron. J. Differ. Equ. 2019, 2019, 1–19. [Google Scholar]
- Yang, Y.; Xia, J.W.; Zhao, J.L.; Li, X.D.; Wang, Z. Multiobjective nonfragile fuzzy control for nonlinear stochastic financial systems with mixed time delays. Nonlinear Anal. Model. Control 2019, 24, 696–717. [Google Scholar] [CrossRef]
- Hou, J.; Zhao, Y. Some remarks on a pair of seemingly unrelated regression models. Open Math. 2019, 17, 979–989. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; Zhang, Y.; Chen, C.L.P. Adaptive finite-time control of stochastic nonlinear systems with actuator failures. Fuzzy Sets Syst. 2019, 374, 170–183. [Google Scholar] [CrossRef]
- Wang, Y.F.; Cheng, H.D.; Li, Q.J. Dynamic analysis of wild and sterile mosquito release model with Poincare map. Math. Biosci. Eng. 2019, 16, 7688–7706. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.D.; Chang, Z.B.; Meng, X.Z. Asymptotic analysis of impulsive dispersal predator-prey systems with Markov switching on finite-state space. J. Funct. Spaces 2019, 2019, 8057153. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, J.W.; Sun, W.; Zhuang, G.M.; Wang, Z. Finite-time tracking control for stochastic nonlinear systems with full state constraints. Appl. Math. Comput. 2018, 338, 207–220. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, T.L.; Fu, Y.; Ma, L.M. Finite-Time Stochastic H∞ Control for Singular Markovian Jump Systems With (x,v)-Dependent Noise and Generally Uncertain Transition Rates. IEEE Access 2019, 7, 64812–64826. [Google Scholar] [CrossRef]
- Wang, F.; Chen, B.; Sun, Y.M.; Lin, C. Finite time control of switched stochastic nonlinear systems. Fuzzy Sets Syst. 2019, 365, 140–152. [Google Scholar] [CrossRef]
- Shi, Z.Z.; Li, Y.N.; Cheng, H.D. Dynamic analysis of a pest management smith model with impulsive state feedback control and continuous delay. Mathematics 2019, 7, 591. [Google Scholar] [CrossRef]
- Li, F.; Zhang, S.Q.; Meng, X.Z. Dynamics analysis and numerical simulations of a delayed stochastic epidemic model subject to a general response function. Comput. Appl. Math. 2019, 38, 95. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.Q. The threshold of a stochastic delayed SIR epidemic model with vaccination. Phys. A 2016, 461, 140–147. [Google Scholar] [CrossRef]
- Gao, S.J.; Chen, L.S.; Nieto, J.J.; Torres, A. Analysis of a delayed epidemic model with pulse vaccination and saturation incidence. Vaccine 2006, 24, 6037–6045. [Google Scholar] [CrossRef]
- Li, Y.J.; Meng, X.Z. Dynamics of an impulsive stochastic nonautonomous chemostat model with two different growth rates in a polluted environment. Discret. Dyn. Nat. Soc. 2019, 2019, 15. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Yin, G. Asymptotic properties of hybrid diffusion systems. SIAM J. Control Optim. 2007, 46, 1155–1179. [Google Scholar] [CrossRef]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Meng, X.; Qi, H. Threshold Analysis and Stationary Distribution of a Stochastic Model with Relapse and Temporary Immunity. Symmetry 2020, 12, 331. https://doi.org/10.3390/sym12030331
Liu P, Meng X, Qi H. Threshold Analysis and Stationary Distribution of a Stochastic Model with Relapse and Temporary Immunity. Symmetry. 2020; 12(3):331. https://doi.org/10.3390/sym12030331
Chicago/Turabian StyleLiu, Peng, Xinzhu Meng, and Haokun Qi. 2020. "Threshold Analysis and Stationary Distribution of a Stochastic Model with Relapse and Temporary Immunity" Symmetry 12, no. 3: 331. https://doi.org/10.3390/sym12030331
APA StyleLiu, P., Meng, X., & Qi, H. (2020). Threshold Analysis and Stationary Distribution of a Stochastic Model with Relapse and Temporary Immunity. Symmetry, 12(3), 331. https://doi.org/10.3390/sym12030331