A Numerical Method for Weakly Singular Nonlinear Volterra Integral Equations of the Second Kind


Abstract
1. Introduction
- (a)
- T has exactly one fixed point, which means equation has exactly one solution ;
- (b)
- the sequence of successive approximations converges to the solution , where can be any arbitrary point in X;
- (c)
- for every , the following error estimateholds.
2. Existence and Uniqueness of the Solution
- (a)
- Equation (4) has a unique solution ;
- (b)
- the sequence of successive approximationsconverges to the solution for any ;
- (c)
- for every , the following error estimateholds, where is the contraction constant.
3. Numerical Method
3.1. Product Integration
3.2. Convergence and Error Analysis
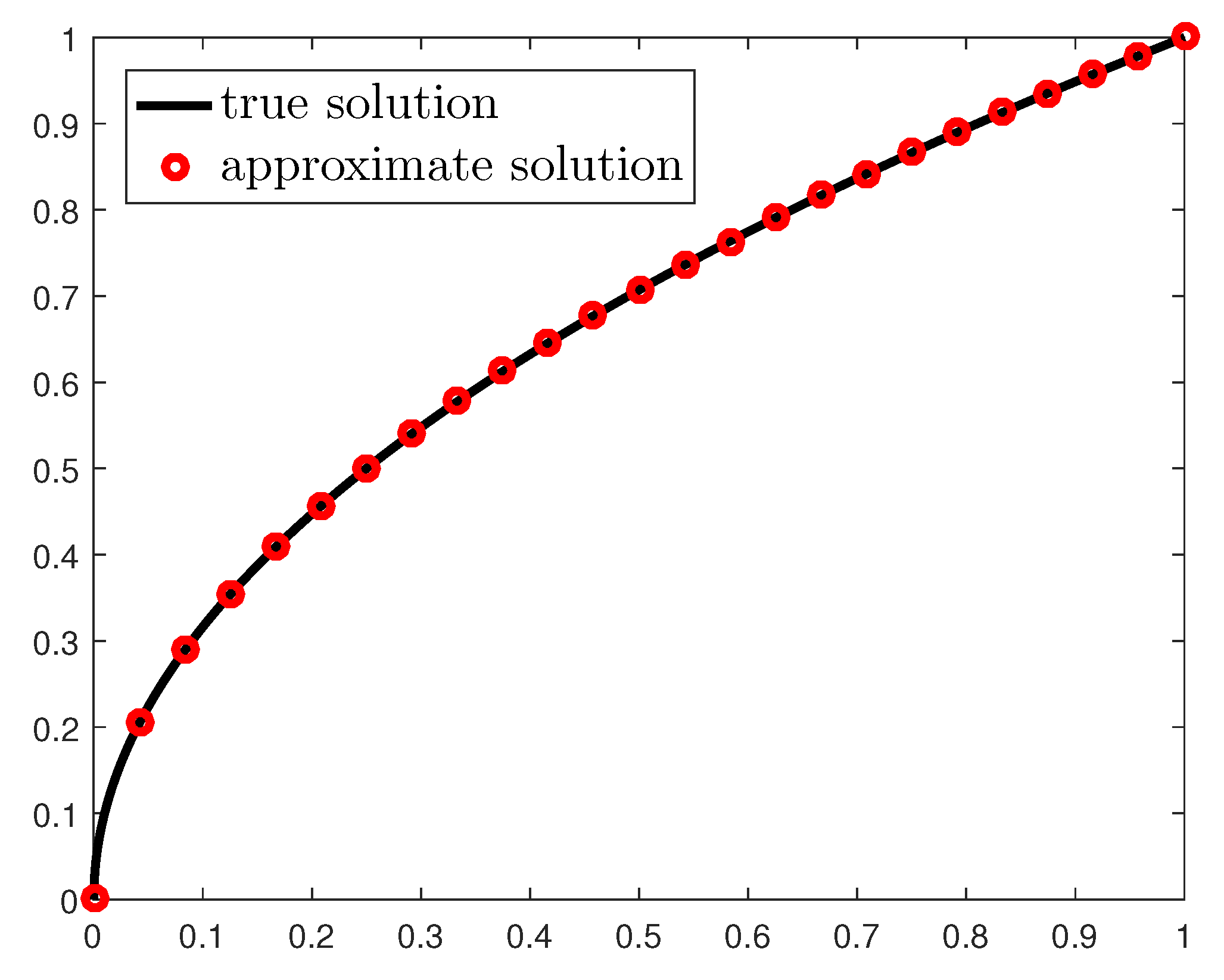
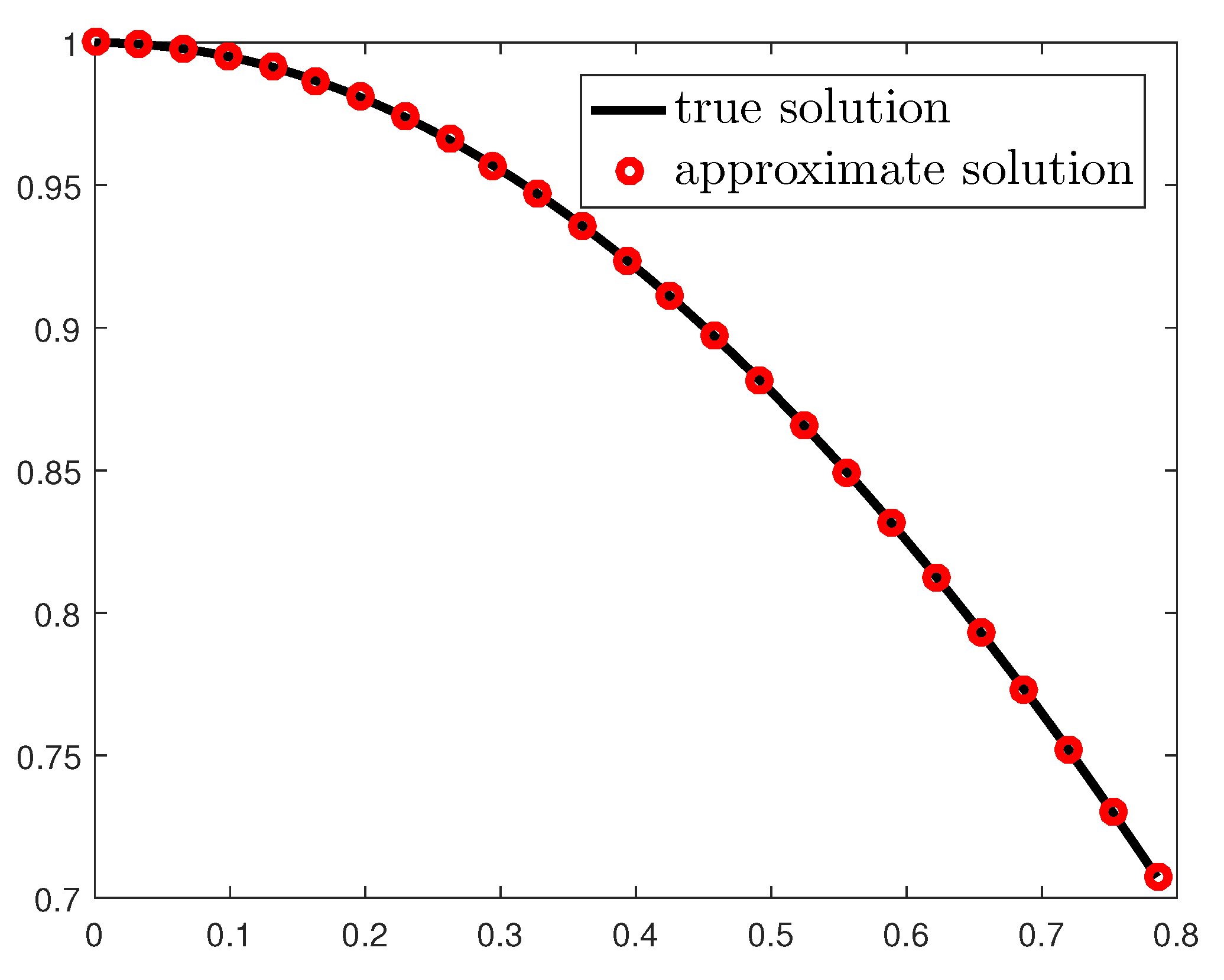
4. Numerical Experiments
5. Conclusions
Funding
Conflicts of Interest
References
- Agarwal, R.P.; O’Regan, D. Singular Volterra integral equations. Appl. Math. Lett. 2000, 13, 115–120. [Google Scholar] [CrossRef]
- Gorenflo, R.; Vessella, S. Abel Integral Equations: Analysis and Applications, Lecture Notes in Mathematics (1461); Springer: Berlin, Germany, 1991. [Google Scholar]
- Wang, J.; Zhu, C.; Fečkan, M. Analysis of Abel-type nonlinear integral equations with weakly singular kernels. Bound. Value Probl. 2014, 2014, 20. [Google Scholar] [CrossRef]
- Becker, L.C. Properties of the resolvent of a linear Abel integral equation: Implications for a complementary fractional equation. Electron. J. Qual. Theory 2016, 64, 1–38. [Google Scholar] [CrossRef]
- Aghili, A.; Zeinali, H. Solution to Volterra singular integral equations and non homogenous time. Gen. Math. Notes 2013, 14, 6–20. [Google Scholar]
- Wu, G.C.; Baleanu, D. Variational iteration method for fractional calculus—A universal approach by Laplace transform. Adv. Differ. Equ. 2013, 2013, 18. [Google Scholar] [CrossRef]
- Andras, S. Weakly singular Volterra and Fredholm-Volterra integral equations. Stud. Univ. Babeş-Bolyai Math. 2003, 48, 147–155. [Google Scholar]
- Bertram, B.; Ruehr, O. Product integration for finite-part singular integral equations: Numerical asymptotics and convergence acceleration. J. Comput. Anal. Appl. 1992, 41, 163–173. [Google Scholar] [CrossRef]
- Brunner, H. The numerical solution of weakly singular Volterra integral equations by collocation on graded meshes. Math. Comput. 1985, 45, 417–437. [Google Scholar] [CrossRef]
- Diogo, T. Collocation and iterated collocation methods for a class of weakly singular Volterra integral equations. J. Comput. Appl. Math. 2009, 229, 363–372. [Google Scholar] [CrossRef]
- Assari, P. Solving weakly singular integral equations utilizing the meshless local discrete collocation technique. Alexandria Eng. J. 2018, 57, 2497–2507. [Google Scholar] [CrossRef]
- Rehman, S.; Pedas, A.; Vainikko, G. Fast solvers of weakly singular integral equations of the second kind. Math. Mod. Anal. 2018, 23, 639–664. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, A.; Kumar, D.; Singh, J.; Singh, A. Analytical solution of Abel integral equation arising in astrophysics via Laplace transform. J. Egypt. Math. Soc. 2015, 23, 102–107. [Google Scholar] [CrossRef]
- Mokharty, P.; Ghoreishi, F. Convergence analysis of the operational Tau method for Abel-type Volterra integral equations. Electron. Trans. Numer. Anal. 2014, 41, 289–305. [Google Scholar]
- Diogo, T.; Ford, N.J.; Lima, P.; Valtchev, S. Numerical methods for a Volterra integral equation with non-smooth solutions. J. Comput. Appl. Math. 2006, 189, 412–423. [Google Scholar] [CrossRef][Green Version]
- Ali, M.R.; Mousa, M.M.; Ma, W.-X. Solution of nonlinear Volterra integral equations with weakly singular kernel by using the HOBW method. Adv. Math. Phys. 2019. [Google Scholar] [CrossRef]
- Nadir, M.; Gagui, B. Quadratic numerical treatment for singular integral equations with logarithmic kernel. Int. J. Comput. Sci. Math. 2019, 10, 288–296. [Google Scholar]
- Alvandi, A.; Paripour, M. Reproducing kernel method for a class of weakly singular Fredholm integral eq uations. J. Taibah Univ. Sci. 2018, 12, 409–414. [Google Scholar] [CrossRef]
- Brunner, H.; Pedas, A.; Vainikko, G. The piecewise polynomial collocation method for nonlinear weakly singular Volterra equations. Math. Comput. 1999, 68, 1079–1095. [Google Scholar] [CrossRef]
- Darwish, M.A. On monotonic solutions of an integral equation of Abel type. Math. Bohem. 2008, 133, 407–420. [Google Scholar] [CrossRef]
- Sidorov, N.A.; Sidorov, D.N.; Krasnik, A.V. Solution of Volterra operator-integral equations in the nonregular case by the successive approximation method. Diff. Equ. 2010, 46, 882–891. [Google Scholar] [CrossRef]
- Sidorov, D.N.; Sidorov, N.A. Convex majorants method in the theory of nonlinear Volterra equations. Banach J. Math. Anal. 2012, 6, 1–10. [Google Scholar] [CrossRef]
- Noeiaghdam, S.; Dreglea, A.; He, J.; Avazzadeh, Z.; Suleman, M.; Fariborzi Araghi, M.A.; Sidorov, D.N.; Sidorov, N. Error Estimation of the Homotopy Perturbation Method to Solve Second Kind Volterra Integral Equations with Piecewise Smooth Kernels: Application of the CADNA Library. Symmetry 2020, 12, 1730. [Google Scholar] [CrossRef]
- Atkinson, K.E. An Introduction to Numerical Analysis, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1989. [Google Scholar]



{kind=link}
{kind=link}
| n | m | |
|---|---|---|
| 12 | 24 | |
| 1 | 1.084348 × 10 | 1.882162 × 10 |
| 5 | 2.799553 × 10 | 5.567188 × 10 |
| 10 | 6.813960 × 10 | 4.690204 × 10 |
| n | m | |
|---|---|---|
| 12 | 24 | |
| 1 | 1.002977 × 10 | 3.014020 × 10 |
| 5 | 2.315358 × 10 | 4.412851 × 10 |
| 10 | 9.363611 × 10 | 5.525447 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micula, S. A Numerical Method for Weakly Singular Nonlinear Volterra Integral Equations of the Second Kind. Symmetry 2020, 12, 1862. https://doi.org/10.3390/sym12111862
Micula S. A Numerical Method for Weakly Singular Nonlinear Volterra Integral Equations of the Second Kind. Symmetry. 2020; 12(11):1862. https://doi.org/10.3390/sym12111862
Chicago/Turabian StyleMicula, Sanda. 2020. "A Numerical Method for Weakly Singular Nonlinear Volterra Integral Equations of the Second Kind" Symmetry 12, no. 11: 1862. https://doi.org/10.3390/sym12111862
APA StyleMicula, S. (2020). A Numerical Method for Weakly Singular Nonlinear Volterra Integral Equations of the Second Kind. Symmetry, 12(11), 1862. https://doi.org/10.3390/sym12111862