1. Introduction
One nice feature of quantum graphs (metric graphs equipped with differential operators) is that they are simple objects. In many cases, for example in the framework of the analysis of self-adjoint realizations of the Laplacian, it is possible to write down explicit formulae for the relevant quantities, such as the resolvent or the scattering matrix (see, e.g., [
1] and [
2]).
If the graph is too intricate though, it can be difficult, if not impossible, to perform exact computations. In such a situation, one may be interested in a simpler, effective model which captures only the most essential features of a complex quantum graph.
If several edges of the graph are much shorter then others, an effective model should rely on a simpler graph obtained by shrinking the short edges into vertices. These new vertices should keep track of at least some of the spectral or scattering properties of the shrinking edges, and perform as a black box approximation for a small, possibly intricate, network.
Our goal is to understand under what circumstances this type of effective models can be implemented. In this report we give some preliminary results showing that under certain assumptions such approximation is possible.
To fix the ideas, consider a compact metric graph of size (total length) , and attach to it several edges of length of order one (or of infinite length), the leads. Clearly, when goes to zero, the graph obtained in this way (let us denote it by ) looks like the star-graph formed by the leads joined in a central vertex. Let us denote by such star-graph and by the central vertex.
Given a certain Hamiltonian (self-adjoint Schrödinger operator) on , we want to show that there exists an Hamiltonian on such that, for small , approximates (in a sense to be specified) . Of course, one main issue is to understand what boundary conditions in the vertex characterize the domain of .
It turns out that, under several technical assumptions, the boundary conditions in are fully determined by the spectral properties of an auxiliary, -independent Hamiltonian defined on the graph .
Below we briefly discuss these technical assumptions, and refer to
Section 2 for the details.
- (i)
The Hamiltonian on is a self-adjoint realization of the operator on , where is a potential term.
- (ii)
To set up the graph we select N distinct vertices in (we call them connecting vertices) and attach to each of them one lead, which is either a finite or an infinite length edge. The domain of is characterized by Kirchhoff (also called standard or free) boundary conditions at the connecting vertices, i.e., in each connecting vertex functions are continuous and the sum of the outgoing derivatives equals zero.
- (iii)
Scale invariance; the small (or
inner) part of the graph scales uniformly in
, i.e.,
. The Hamiltonian
has a specific scaling property with respect to the parameter
; loosely speaking, up to a multiplicative factor, the “restriction” of
to
is unitarily equivalent to an
-independent operator on
. The scale invariance property can be made precise by reasoning in terms of Hamiltonians on the inner graph
. This is done in
Section 4 below. Here we just mention that this assumption forces the scaling on the
component of the potential
,
, and, in the vertices of
, the Robin-type vertex conditions (if any) also scale with
accordingly.
- (iv)
The “restriction” of to the leads does not depend on . In particular, , the component of the potential, does not depend on .
We prove that it is always possible to identify an Hamiltonian
on
that approximates the Hamiltonian
. The Hamiltonian
is a self-adjoint realization of the operator
on
, and it is characterized by scale invariant vertex conditions in
, i.e., vertex conditions with no Robin part (see [
3], Section 1.4.2); in our notation, scale invariant means
in Equation (
1). The precise form of the possible effective Hamiltonians is given in Definitions 6 and 7 below.
The convergence of to is understood in the following sense. We look at the resolvent operator , , as an operator in the Hilbert space . In the limit , the bounded operator converges to an operator which is diagonal in the decomposition . The component of the limiting operator is the resolvent of a self-adjoint operator in , which we identify as the effective Hamiltonian on the star-graph.
Additionally, we characterize the limiting boundary conditions in the vertex in terms of the spectral properties of an auxiliary Hamiltonian on the (compact) graph . We distinguish two mutually exclusive cases: in one case (that we call generic) zero is not an eigenvalue of the auxiliary Hamiltonian; in the other case (we call it non-generic) zero is an eigenvalue of the auxiliary Hamiltonian.
In the generic case the effective Hamiltonian, denoted by , is characterized by Dirichlet (also called decoupling) boundary conditions in the vertex , i.e., functions in its domain are zero in , see Definition 6. From the point of view of applications this is the less interesting case, since the leads are decoupled (no transmission through is possible).
In the non-generic case the situation is more involved. If zero is an eigenvalue of the auxiliary Hamiltonian one can identify a corresponding set of orthonormal eigenfunctions (in general eigenvalues can have multiplicity larger than one, included the zero eigenvalue). In the domain of the effective Hamiltonian , the boundary conditions in are associated to the values of these eigenfunctions in the connecting vertices, see Definition 7. In this case, the boundary conditions in the vertex are scale invariant but, in general, not of decoupling type. For example, if the multiplicity of the zero eigenvalue is one, and the corresponding eigenfunction assumes the same value in all the connecting vertices, the boundary conditions are of Kirchhoff type.
The proof of the convergence is based on a Kreĭn-type formula for the resolvent
. This formula allows us to write
as a block matrix operator in the decomposition
(see Equation (
31)). In the formula, the first term,
, is block diagonal and contains the resolvents of
and
(a scaled down version of the auxiliary Hamiltonian, see
Section 2.4); the second term is non-trivial, and couples the
and
components to reconstruct the resolvent of the full Hamiltonian
. As
goes to zero, the off-diagonal components in
converge to zero, hence, the
and
components are always decoupled in the limit. A careful analysis of the non-trivial term in Formula (
31) shows that it converges to zero in the generic case. In the non-generic case, instead, the
component of the non-trivial term converges to a finite operator, and the whole
component of
reconstructs the resolvent of the effective Hamiltonian
.
The limiting behavior of is essentially determined by the small asymptotics of the spectrum of the inner Hamiltonian . The scale invariance assumption implies that the eigenvalues of are given by , where are the eigenvalues of the (scaled up) auxiliary Hamiltonian . Obviously, all the non-zero eigenvalues move to infinity as ; the zero eigenvalue instead, if it exists, persists, and for this reason it plays a special role in the analysis.
Closely related to our work is the paper by G. Berkolaiko, Y. Latushkin, and S. Sukhtaiev [
4], to which we refer also for additional references. In [
4] the authors analyze the convergence of Schrödinger operators on metric graphs with shrinking edges. Our setting is similar to the one in [
4] with several differences. In [
4] there are no restrictions on the topology of the graph, i.e.,
is not necessarily a star-graph; outer edges can form loops, be connected among them or to arbitrarily intricate finite length graphs. In [
4], moreover, the scale invariance assumption is missing. With respect to our work, however, the potential terms in [
4] do not play an essential role in the limiting problem (because they are uniformly bounded in the scaling parameter).
As it was done in [
4], to analyze the convergence of
to
, since they are operators on different Hilbert spaces, one could use the notion of
-quasi unitary equivalence (or generalized norm resolvent convergence) introduced by P. Exner and O. Post in the series of works [
5,
6,
7,
8,
9]. In Theorems 1 and 2 we state our main results in terms of the expansion of the resolvent in the decomposition
; and comment on the
-quasi unitary equivalence of the operators
and
(or
) in Remark 6.
Our analysis, with the scaling on the potential
, is also related to the problem of approximating point-interactions on the real line through scaled potentials in the presence of a zero energy resonance, see, e.g., [
10]. The same type of scaling arises naturally also in the study of the convergence of Schrödinger operators in thin waveguides to operators on graphs, see, e.g., [
11,
12,
13,
14].
Problems on graphs with a small compact core have been studied in several papers in the case in which
is itself a star-graph, see, e.g., [
15,
16,
17,
18,
19]. In particular, in the latter series of works, the authors point out the role of the zero energy eigenvalue.
Also related to our work is the problem of the approximation of vertex conditions through “physical Hamiltonians”. In [
20] (see also references therein), it is shown that all the possible self-adjoint boundary conditions at the central vertex of a star-graph, can be obtained as the limit of Hamiltonians with
-interactions and magnetic field terms on a graph with a shrinking inner part.
Instead of looking at the convergence of the resolvent, a different approach consists in the analysis of the time dependent problem. This is done, e.g., in [
21], for a tadpole-graph as the circle shrinks to a point.
The paper is structured as follows. In
Section 2 we introduce some notation, our assumptions and present the main results, see Theorems 1 and 2. In
Section 3 we discuss the Kreĭn formulae for the resolvents of
and
(the limiting Hamiltonian in the non-generic case). These formulae are the main tools in our analysis. In
Section 4 we discuss the scale invariance properties of the auxiliary Hamiltonian, and other relevant operators. In
Section 5 we prove Theorems 1 and 2. In doing so we present the results with a finer estimate of the remainder, see Theorems 3 and 4. We conclude the paper with two appendices: in
Appendix A we briefly discuss the proofs of the Kreĭn resolvent formulae from
Section 3; in
Appendix B we prove some useful bounds on the eigenvalues and eigenfunctions of
.
Index of Notation
For the convenience of the reader we recall here the notation for the Hamiltonians used in our analysis. For the definitions we refer to
Section 2 below.
is the full Hamiltonian.
is the auxiliary Hamiltonian
is the scaled down auxiliary Hamiltonian (see Definition 2 and
Section 4);
.
is the effective Hamiltonian in the generic case.
is the effective Hamiltonian in the non-generic case.
is the diagonal Hamiltonian
in the decomposition
(see
Section 3).
2. Preliminaries and Main Results
For a general introduction to metric graphs we refer to the monograph [
3]. Here, for the convenience of the reader, we introduce some notation and recall few basic notions that will be used throughout the paper.
2.1. Basic Notions and Notation
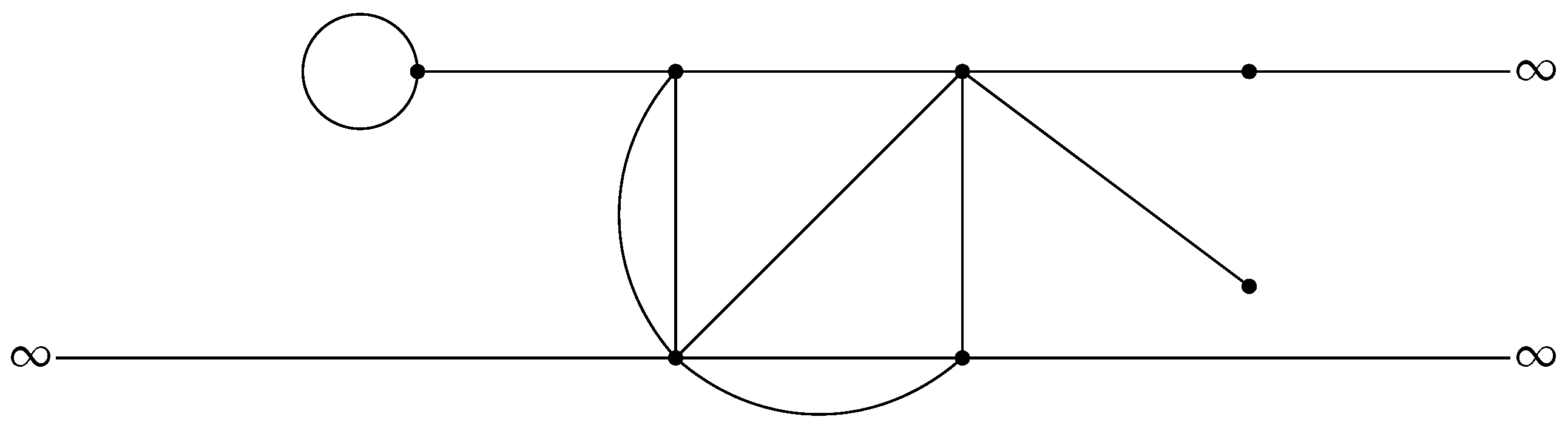
To fix the ideas we start by selecting a collection of points, the vertices of the graph, and a connection rule among them. The bonds joining the vertices are associated to oriented segments and are the finite-length edges of the graph. Other edges can be of infinite length, and these edges are connected only to one vertex and are associated to half-lines. In this way we obtained a metric graph, see, e.g.,
Figure 1.
Given a metric graph we denote by the set of its edges and by the set of its vertices. We shall also use the notation and to denote the cardinality of and respectively. We shall always assume that both and are finite.
For any , we identify the corresponding edge with the segment if e has finite length , or with if e has infinite length.
Given a function
, for
,
denotes its restriction to the edge
e. With this notation in mind one can define the Hilbert space
with scalar product and norm given by
In a similar way one can define the Sobolev space
, equipped with the norm
Note that functions in are continuous in the edges of the graph but do not need to be continuous in the vertices.
For any vertex we denote by the degree of the vertex, this is the number of edges having one endpoint identified by v, counting twice the edges that have both endpoints coinciding with v (loops). Let be the set of edges which are incident to the vertex v. For any vertex v we order the edges in in an arbitrary way, counting twice the loops. In this way, for an arbitrary function , one can define the vector associated to the evaluation of in v, i.e., the components of are given by or , , depending whether v is the initial or terminal vertex of the edge e, or by both values if e is a loop.
In a similar way one can define the vector with components and , . Note that in the definition of , denotes the derivative of with respect to x, and the derivative in v is always taken in the outgoing direction with respect to the vertex.
We are interested in defining self-adjoint operators in which coincide with the Laplacian, possibly plus a potential term.
We denote by B the potential term in the operator, so that is a real-valued function on the graph; and denote by its restriction to the edge e. Additionally we assume that B is bounded and compactly supported on .
For every vertex we define a projection and a self-adjoint operator in , both and can be identified with Hermitian matrices.
It is well known, see, e.g., [
3] and ([
22], Example 5.2) that the operator
defined by:
is self-adjoint. Instead of Equation (
2), we shall write
to be understood componentwise.
We remark that for every
and
as above,
is a self-adjoint extension of the symmetric operator
2.2. Graphs with a Small Compact Core
We consider a graph obtained by attaching several edges to a small compact core (a compact metric graph of size ).
We denote the compact core of the graph by
. The graph
is obtained by shrinking a compact graph
by means of a parameter
, more precisely, we set
We denote by the set of edges of the graph and by the set of edges of the graph .
In the graph (or, equivalently, in ) we select N distinct vertices that we label with , and refer to them as connecting vertices. We shall denote by the set of connecting vertices. We denote by the set of all the remaining vertices, and call the elements of inner vertices (note that the set may be empty).
To construct the graph
, we attach to each connecting vertex one additional edge which can be an half-line or an edge of finite length (not dependent on
). We shall call these additional edges
outer edges and denote by
the corresponding set of edges; obviously
. When needed, we shall denote these edges by
, so that the edge
is connected to the vertex
,
. Moreover we shall use the notation
Note that if is of finite length the endpoint which does not coincide with the connecting vertex is of degree one (all the finite length outer edges are pendants).
We shall always assume, without loss of generality, that for each edge in the connecting vertex is identified by .
We denote by and the sets of edges and vertices of the graph . We note that and , where is the set of vertices in which are neither connecting nor inner vertices.
Remark 1. For anywe denote byits degree as a vertex of the graph, so that its degree as a vertex of the graph is .
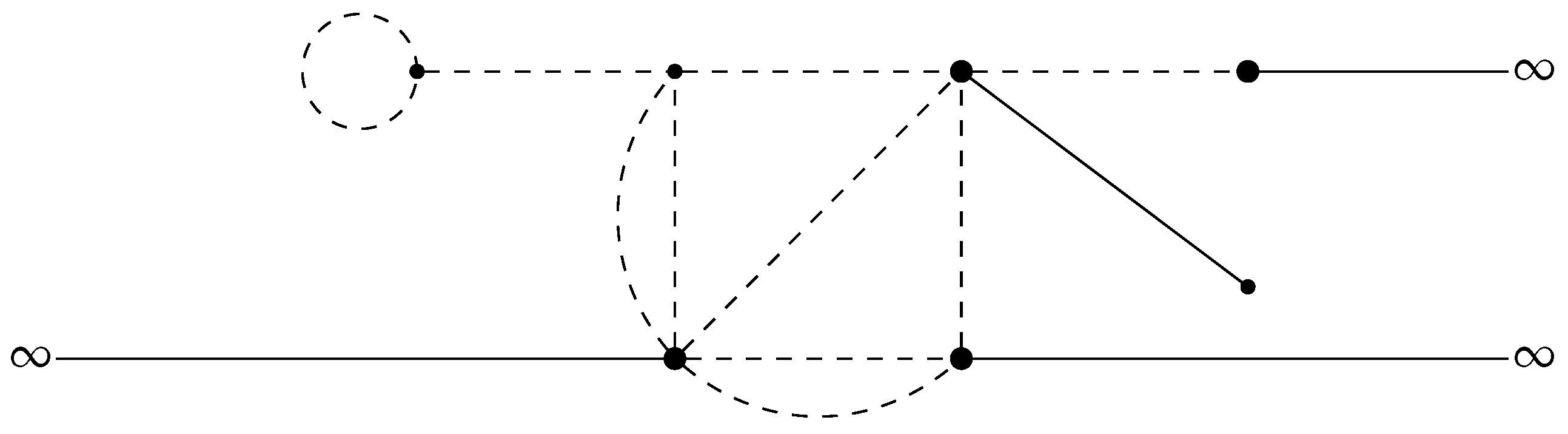
As
, the inner graph shrinks to one point, in the limit all the connecting vertices merge in one vertex which we identify with the point
,
being the coordinate along the edge
,
. In the limit the graph
looks like a star-graph with
N edges connected in the origin, see
Figure 2; we denote the star-graph by
.
We define the Hilbert spaces:
We remark that one can always think of
as the direct sum
and decompose each function
as
with
and
. When no misunderstanding is possible, we omit the dependence on
, moreover we simply write
, instead of
or
.
In a similar way we introduce the Sobolev spaces
2.3. Full Hamiltonian
Next we define an Hamiltonian
in
(of the form given in Equations (
1)–(
3)); this is the object of our investigation.
Recall that if , then . For any we fix an orthogonal projection , and a self-adjoint operator in . Since vertices in have degree one, is either 1 or 0; whenever it makes sense to define which turns out to be the operator acting as the multiplication by a real constant. In other words, the boundary conditions in (of the form given in the definition of ) can be of Dirichlet type, ; of Neumann type ; or of Robin type with .
It would be possible to consider a more general setting in which the outer graph has a non trivial topology, in same spirit of the work [
4], but we will not pursue this goal.
For any
we define the orthogonal projection (see Remark 1 for the definition of
):
where
denotes the vector (of unit norm) in
defined by
. In a similar way, we define the orthogonal projection
where
is defined by
. Both
and
have one-dimensional range given by the span of the vectors
and
respectively.
A function satisfies Kirchhoff conditions in the vertex v (it is continuous in v and the sum of the outgoing derivatives in v equals zero) if and only if and .
For any we fix an orthogonal projection , and a self-adjoint operator in .
We fix an
-dependent real-valued function
, such that in the
decomposition (
5) one has
. With
bounded and compactly supported.
Scale invariance; recall that
, see Equation (
4). We assume additionally: that
, where
is bounded; and that
, for all
. For a discussion on the meaning and the main consequences of these assumptions we refer to
Section 4.
Definition 1 (Hamiltonian
Hε)
. We denote bythe self-adjoint operator indefined by Remark 2. In thedecomposition one hasNote that the action of the outer component ofdoes not depend on ε. Remark 3. By the definition of, in each connecting vertex boundary conditions inare of Kirchhoff-type: the function ψ is continuous inandwhere the sum is taken on all the edges incident on v (counting loops twice) and the derivative is understood in the outgoing direction from the vertex. 2.4. Auxiliary Hamiltonian
We are interested in the limit of the operator as . We shall see that the limiting properties of are strongly related to spectral properties of the Hamiltonian :
Definition 2 (Auxiliary Hamiltonian, scaled down version)
. Let
, and define the unitary scaling group
its inverse is
By the scaling properties
and
, one infers the unitary relation
with
defined on
and given by
. One consequence of Equation (
7) is that the spectrum of
is related to the spectrum of
by the relation
(see
Section 4 for more comments on the implications of the scale invariance assumption). For this reason, we prefer to formulate the results in terms of the spectral properties of the
-independent Hamiltonian
instead of the spectral properties of
.
Definition 3 (Auxiliary Hamiltonian
)
. We call Auxiliary Hamiltonian the Hamiltoniandefined on.
Letting, the domain and action ofare given by The spectrum of
consists of isolated eigenvalues of finite multiplicity, see, e.g., ([
3], Theorem 3.1.1). For
, we denote by
the eigenvalues of
(counting multiplicity) and by
a corresponding set of orthonormal eigenfunctions.
Definition 4 (Generic/non-generic case)
. In the analysis of the limit ofwe distinguish two cases:
- (1)
Generic (or non-resonant, or decoupling) case.is not an eigenvalue of the operator.
- (2)
Non-generic (or resonant) case.is an eigenvalue of the operator.
In the non-generic case we denote bya set of (orthonormal) eigenfunctions corresponding to the zero eigenvalue. By Equation (8), functions inare continuous in the connecting vertices (see also Remark 3). We denote by,, the value ofin v, and define the vectors
Definition 5 (
)
. In the non-generic case, letbe the operatoris a bounded self-adjoint operator (it is anHermitian matrix). Denote byand, the range and the kernel ofrespectively. One has that the subspacesandare-invariant. Moreover,. In what follows we denote bythe orthogonal projection (Riesz projection, see, e.g., ([23], Section I.2)) on, and bythe orthogonal projection on. Remark 4. We note thatif and only iffor all. To see that this indeed the case, observe that ifthen it must be, hence,, which in turn impliesfor all. The other implication is trivial.
Since, we inferfor all; hence,, or, equivalently,.
2.5. Effective Hamiltonians
We shall see that the definition of the limiting operator (effective Hamiltonian in ) depends on presence of a zero eigenvalue for (the occurrence of the generic case vs. the non-generic case).
Recall that for
, we used
to denote the component of
on the edge
attached to the connecting vertex
. Moreover, we assumed that the vertex
is identified by
. With this remark in mind, given a function
we define the vectors
These correspond to
and
, as defined in
Section 2.1, where
is the central vertex of the star-graph
.
In the limit , the connecting vertices in coincide, and can be identified with the vertex .
We distinguish two possible effective Hamiltonians in .
Definition 6 (Effective Hamiltonian, generic case)
. We denote bythe self-adjoint operator indefined by Definition 7 (Effective Hamiltonian, non-generic case)
. Letbe the orthogonal projection given in Definition 5. We denote bythe self-adjoint operator indefined by The boundary conditions in
in the definitions of
and
are scale invariant (see ([
3], Section 1.4.2)).
2.6. Main Results
In what follows C denotes a generic positive constant independent on . Given two Hilbert spaces X and Y, we denote by (or simply by if ) the space of bounded linear operators from X to Y, and by the corresponding norm. For any , we use the notation to denote a generic operator from X to Y whose norm is bounded by for small enough.
Given a bounded operator
A in
we use the notation
to describe its action in the
decomposition (
5): here
,
, are operators defined according to
Theorem 1. Let. In the generic case (see Definition 4)where the expansion has to be understood in thedecomposition (11). Theorem 2. Let. In the non-generic case (see Definition 4), letbe the restriction ofto.
- (i)
If,is invertible as an operator in, andwhere the expansion has to be understood in thedecomposition (11). - (ii)
If, then, and expansion (14) holds true with,for all, and the error term changed in. - (iii)
If the vectors,, are linearly independent, thenfor all, and
Remark 5. Finer estimates on the remainders in Equations (13) and (14) are given in Theorems 3 and 4 below. Remark 6. We recall and adapt to our setting the notion of-quasi unitary equivalence of operators acting on different Hilbert spaces introduced by P. Exner and O. Post, see in particular ([7], Section 3.2) and ([9], Chapter 4). See also ([4], Section 5) for a discussion on the application of this approach to the analysis of operators on graphs with shrinking edges. Let J be the operatorwhereis understood in the decomposition (5). Its adjointmapsin, and is given by: Note that, whereis the identity in.
The operatoris-quasi unitarily equivalent to a self-adjoint operatoriniffor some. Note that in the decomposition (12), one hasandhence: By Theorem 1, in the generic case the operatoris ε-quasi unitarily equivalent to the operator.
By Theorem 2–(iii), in the non-generic case, if the vectors,, are linearly independent, the operatoris-quasi unitarily equivalent to the operator. More precisely, the second condition in Equation (16) always holds true, while the first one holds true only under the additional assumption that the vectorsare linearly independent. We refer to [9] for a comprehensive discussion on the comparison between operators acting on different spaces. 3. Kreĭn Resolvent Formulae
In this section we introduce the main tools in our analysis: the Kreĭn-type resolvent formulae for the resolvents of
and
. The proofs are postponed to
Appendix A.
Given the Hilbert spaces , , , and , and a couple of operators and , we denote by , the operator , with and , acting as , for all , and .
We set
with
and
given as in Definitions 6 and 2.
Given an operator A, we denote by its resolvent set; the resolvent of A is defined as for all .
For the resolvents of the relevant operators we introduce the shorthand notation
Obviously, all the operators in Equations (
18)–(
21) are well-defined and bounded for
, moreover
.
Our aim is to write the resolvent difference
in a suitable block matrix form, associated to the off-diagonal matrix
in Equation (
29). To do so we follow the approach of Posilicano [
22,
24]. All the self-adjoint extensions of the symmetric operator obtained by restricting a given self-adjoint operator to the kernel of a given map
are parametrized by a projection
and a self-adjoint operator
in
. We choose the reference operator
and the map
so that the Hamiltonian of interest
is the self-adjoint extension parametrized by the identity and the self-adjoint operator given by the off-diagonal matrix
. The Kreĭn formula for the resolvent difference
, see Lemma 2, is obtained within the approach from [
22,
24].
Note that we are using the identification .
The following maps are well-defined and bounded
and
Moreover we set
for
. Note that
and that all the maps above are well-defined bounded operators for
.
The adjoint maps (in
) are denoted by
(
denoting the adjoint) and
Obviously to be understood as an operator from to .
We note that, see Remark A2,
and
, for all
and
respectively, so that the maps (
,
z-dependent matrices)
are well defined. Moreover, we set
obviously
.
In the following Lemmata we give two Kreĭn-type resolvent formulae: one allows to express the resolvent of
in terms of the resolvent of
; the other gives the resolvent of
in terms of the resolvent of
. For the proofs we refer to
Appendix A,
Appendix A.1.
Lemma 1. Letbe an orthogonal projection in, andandbe the Hamiltonians defined according to Definitions 7 and 6. Then, for any, the mapis invertible and Lemma 2. Let Θ
be the block matrix Then, for any, the mapis invertible and We conclude this section with an alternative formula for the resolvent
. We refer to
Appendix A,
Appendix A.2, for the proof.
Lemma 3. Let, then the maps (, z-dependent matrices)are invertible. Moreover, 4. Scale Invariance
In this section we discuss the scale invariance properties of and collect several formulae concerning the operators , , , and .
Recall that we have denoted by and the eigenvalues and a corresponding set of orthonormal eigenfunctions of .
The eigenvalues of
(counting multiplicity) and a corresponding set of orthonormal eigenfunctions are given by
where
are the eigenvalues of
, and
the corresponding (orthonormal) eigenfunctions.
By the spectral theorem and by the scaling properties (
32),
is given by
Hence, its integral kernel can be written as
Since there exists a positive constant
C such that
and
for
n large enough (see
Appendix B), the series in Equation (
34) is uniformly convergent for
. Hence, we can write the operators
and
, and the matrix
in a similar way, see Equations (
35) and (
36) below.
Note that, since functions in
are continuous in the connecting vertices, the eigenfunctions
can be evaluated in the connecting vertices, and, by the definition of
(see Equation (
23)), one has
So that, for any eigenfunction
we can define the vector
as
We note that
, with
and that the vectors
are defined in the same way as the vectors
in Equation (
9).
Remark 7. In the non-generic case, zero is an eigenvalue of. We denote bythe corresponding set of (orthonormal) eigenfunctions given bywhereare the eigenfunctions corresponding to the eigenvalue zero of. The vectorsare related to the vectorsby the identity.
By the discussion above, and by the definitions (
24), (
25), and (
27), we obtain
and


{kind=link}
{kind=link}

