1. Introduction
Sturm’s oscillation theorem [
1] is a classic example for how solutions of linear self-adjoint differential eigenvalue problems
(where
D is a Sturm-Liouville operator) are ordered and classified by the number of nodal points. According to Sturm’s oscillation theorem, the
n-th eigenfunction,
, has
nodal points, when the eigenfunctions are ordered by increasing order of their corresponding eigenvalues
. Equivalently, the number
of nodal domains (the connected domains where
has the same sign) obeys
for all
n.
In higher dimensions, (e.g., for the free Schrödinger equation
on a bounded domain with self-adjoint boundary conditions) the number of nodal domains is bounded from above,
, by Courant’s theorem [
2] (see [
3] for the case of Schrödinger equation with potential). Furthermore, there is only a finite number of Courant sharp eigenfunctions for which
, as was shown by Pleijel [
4].
In (linear) quantum graph theory one considers the Schrödinger equation with self-adjoint matching conditions at the vertices of a metric graph. Locally, graphs are one-dimensional though the connectivity of the graph allows to mimic some features of higher dimensions. Nodal counts for quantum graphs have been considered for more than a decade [
5]. For example, it has been shown in [
5] that Courant’s bound applies to quantum graphs as well. Yet, for graphs there are generically infinitely many Courant sharp eigenfunctions [
6,
7]. For tree graphs it has been proven that all generic eigenfunctions are Courant sharp, i.e.,
[
8,
9]. In other words, Sturm’s oscillation theorem generalizes to metric trees graphs. It has been proven by one of us that the converse also holds, namely that if the graph’s nodal count obeys
for all
n, then this graph is a tree [
10]. When a graph is not a tree, its first Betti number,
is positive. Here,
are correspondingly the numbers of graph’s edges and vertices and
indicates the number of the graphs independent cycles. In addition to Courant’s bound, the nodal count of a graph is bounded from below,
as was shown first in [
11]. The actual number of nodal domains may be characterized by various variational methods [
12,
13]. Some statistical properties of the nodal count are also known [
6], but to date there is no general explicit formula or a full statistical description of the nodal count.
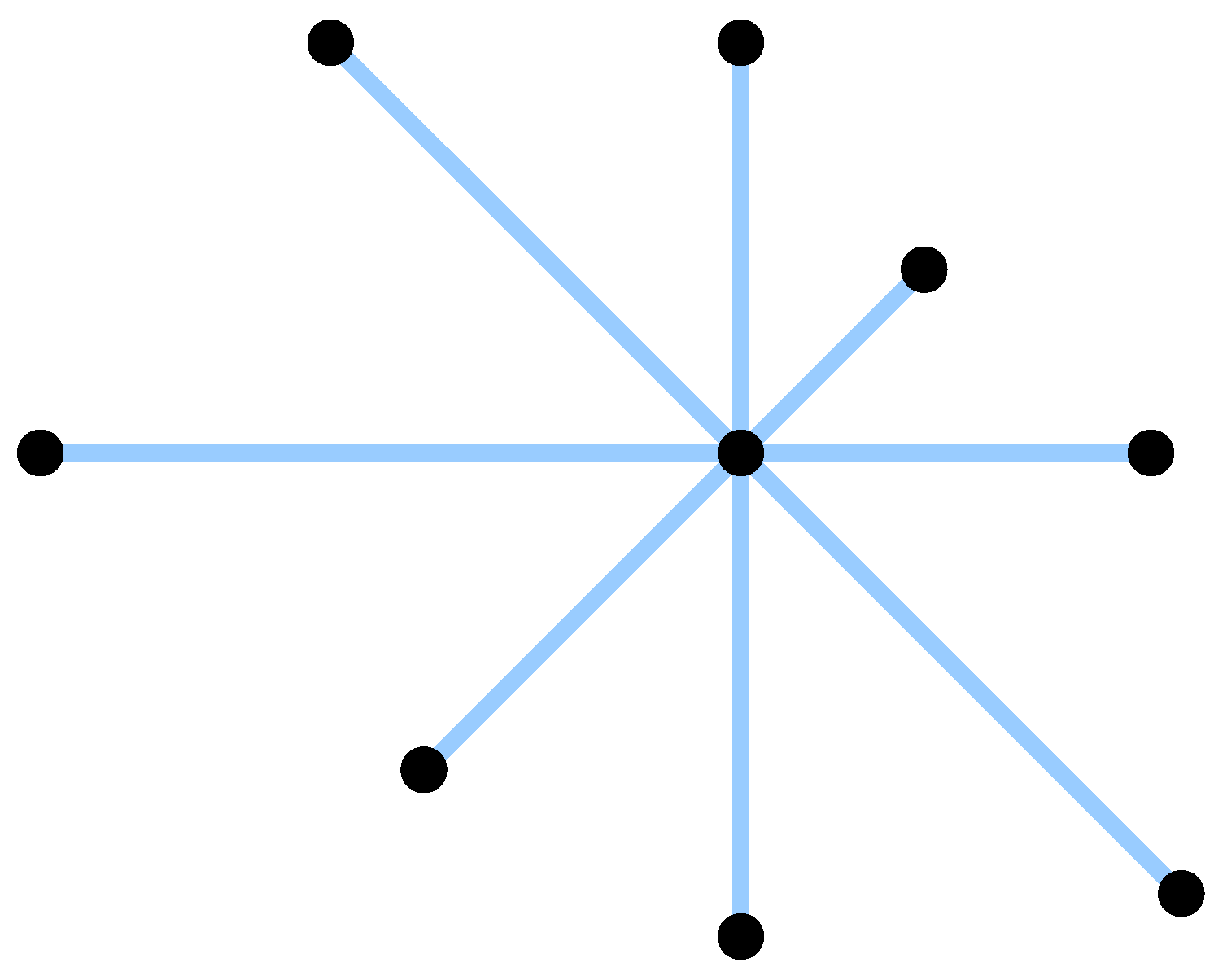
In the present work we present some related results concerning nodal points and nodal domains for
nonlinear star graphs (see
Figure 1).
Nonlinear wave equations on metric graphs (i.e., nonlinear quantum graphs) have recently attracted considerable interest both from the mathematical perspective and the applied regime. They allow the study of intricate interplay between the non-trivial connectivity and the nonlinearity. Among the physical applications of nonlinear wave equations on metric graphs is light transmission through a network of optical fibres or Bose-Einstein condensates in quasi one-dimensional traps. We refer to [
14,
15] where a detailed overview of the recent literature and some applications is given and just summarise here the relevant work related to the nodal counting. In a previous work some of us have shown that Sturm’s oscillation theorem is generically broken for nonlinear quantum stars, apart from the special case of an interval [
16]. This is not unexpected as the set of solutions is known to have a far more complex structure. Our main result here is that the nonlinear case of a metric star allows for solutions with any given number of nodal domains on each edge. Namely, for a star with
E edges and a certain
E-tuple,
of non-negative integers there are solutions with
nodal points on the
e-th edge for
.
In the remainder of the introduction chapter we define the setting. In
Section 2 we state our main results. In
Section 3 we present the nonlinear generalization of Sturm’s oscillation theorem to an interval, some general background and properties of nonlinear solutions as well as a few motivating numerical results. In
Section 4 we prove the main theorems and afterwards in
Section 5 we discuss our results and their possible implications in the broader context of nonlinear quantum graphs.
1.1. The Setting—Nonlinear Star Graphs
Metric star graphs are a special class of metric trees with
E edges and
vertices such that all edges are incident to one common vertex (see
Figure 1). The common vertex will be called the centre of the star and the other vertices will be called the boundary. We assume that each edge has a finite length
(
) and a coordinate
such that
at the centre and
at the boundary. On each edge
we consider the stationary nonlinear Schrödinger (NLS) equation
for
. Here
g is a nonlinear coupling parameter and
a spectral parameter. We consider this as a generalized eigenequation with eigenvalues
. We have assumed here that the nonlinear interaction is homogeneously repulsive (
) or attractive (
) on all edges and will continue to do so throughout this manuscript. One may consider more general graphs where
g takes different values (and different signs) on different edges (or even where
is a real scalar function on the graph). It is not, however, our aim to be as general as possible. In the following we restrict ourselves to one generic setting in order to keep the notation and discussion as clear and short as possible. We will later discuss some straightforward generalizations of our results.
At the centre we prescribe Kirchhoff (a.k.a Neumann) matching conditions
and at the boundary we prescribe Dirichlet conditions
.
For the coupling constant g it is sufficient without loss of generality to consider three different cases. For one recovers the linear Schrödinger equation and thus standard quantum star graphs. For one has a nonlinear quantum star graph with repulsive interaction and for one has a nonlinear quantum star with attractive interaction. If g takes any other non-zero value a simple rescaling of the wavefunction is equivalent to replacing .
Without loss of generality we may focus on real-valued and twice differentiable solutions
, where twice differentiable refers separately to each
. We also assume that the solution is not the constant zero function on the graph, namely that there is an edge
e and some point
with
. Moreover, any complex-valued solution is related to a real-valued solution by a global gauge-transformation (i.e., a change of phase
) [
14].
1.2. The Nodal Structure
We will call a solution regular if the wavefunction does not vanish on any edge, that is for each edge e there is with . Accordingly, non-regular solutions vanish identically on some edges, in other words there is (at least) one edge e such that for all .
A solution with a node at the centre, (by continuity this is either true for all e or for none) will be called central Dirichlet because it satisfies Dirichlet conditions at the centre (in addition to the Kirchhoff condition). Hence, non-regular solutions are always central Dirichlet. Our main theorem will construct solutions which are regular and central Dirichlet. Note that from a regular central Dirichlet solution on a metric star graph G one can construct non-regular solutions on a larger metric star graph , if G is a metric subgraph of : on each edge one may just extend the solution by setting for all .
Our main aim is to characterize solutions in terms of their nodal structure. The nodal structure is described in terms of either the number of nodal domains (maximal connected subgraphs where ) or by the number of nodal points. We will include in the count the trivial nodal points at the boundary. Note that regular solutions which are not central Dirichlet obey while regular central Dirichlet solutions obey . We have stated in the introduction that in the linear case, , such a characterization is very well understood even for the more general tree graphs, which obey a generalized version of Sturm’s oscillation theorem.
As we will see, the solutions of nonlinear star graphs have a very rich structure and a classification of solutions in terms of the total numbers
or
of nodal domains or nodal points is far from being unique. We will thus use a more detailed description of the nodal structure of the solutions. To each regular solution
we associate the
E-tuple
where
is the number of nodal domains of the wavefunction
on the edge
. For solutions which are not central Dirichlet,
also equals the number of nodal points of
(including the nodal point at the boundary). We will call
the
(regular) nodal edge count structure of the (regular) solution
. For non-regular solutions one may characterize the nodal structure in a similar way by formally setting
for all edges where the wavefunction is identical zero. In that case we speak of a
non-regular nodal edge count structure. Note that we do not claim that the nodal edge count structure,
, leads to a unique characterization of the solutions (which actually come in one-parameter families). Indeed we have numerical counter-examples. With this more detailed description we show that a much larger set of nodal structures is possible in nonlinear quantum star graphs compared to the linear case, as is stated in the next section.
2. Statement of Main Theorems
Our main results concern the existence of solutions with any given nodal edge structure. We state two theorems: One for repulsive nonlinear interaction
and one for attractive nonlinear interaction
. The two theorems establish the existence of central Dirichlet solutions with nodal edge structure
subject to (achievable) conditions on the edge lengths. As corollaries, we get the existence of central Dirichlet solutions with any prescribed values of
(again subject to some achievable conditions on the lengths). Throughout this section we consider a nonlinear quantum star graph as described in
Section 1.1. In order to avoid trivial special cases we will assume
. Indeed,
is the interval and well understood and
reduces to an interval (of total length
) as the Kirchhoff vertex condition in this case just states that the wavefunction is continuous and has a continuous first derivative. We will also assume that all edge lengths are different. Without loss of generality we take them as ordered
(
).
Theorem 1. If (repulsive case) and either
- 1.
the number of edges E is odd, or
- 2.
E is even andwhere are implicitly defined in terms of the edge lengths bywithbeing the complete elliptic integral of first kind,
then there exists a regular central Dirichlet solution for some positive value of the spectral parameter such that there is exactly one nodal domain on each edge, i.e., the nodal edge structure satisfies for all edges e.
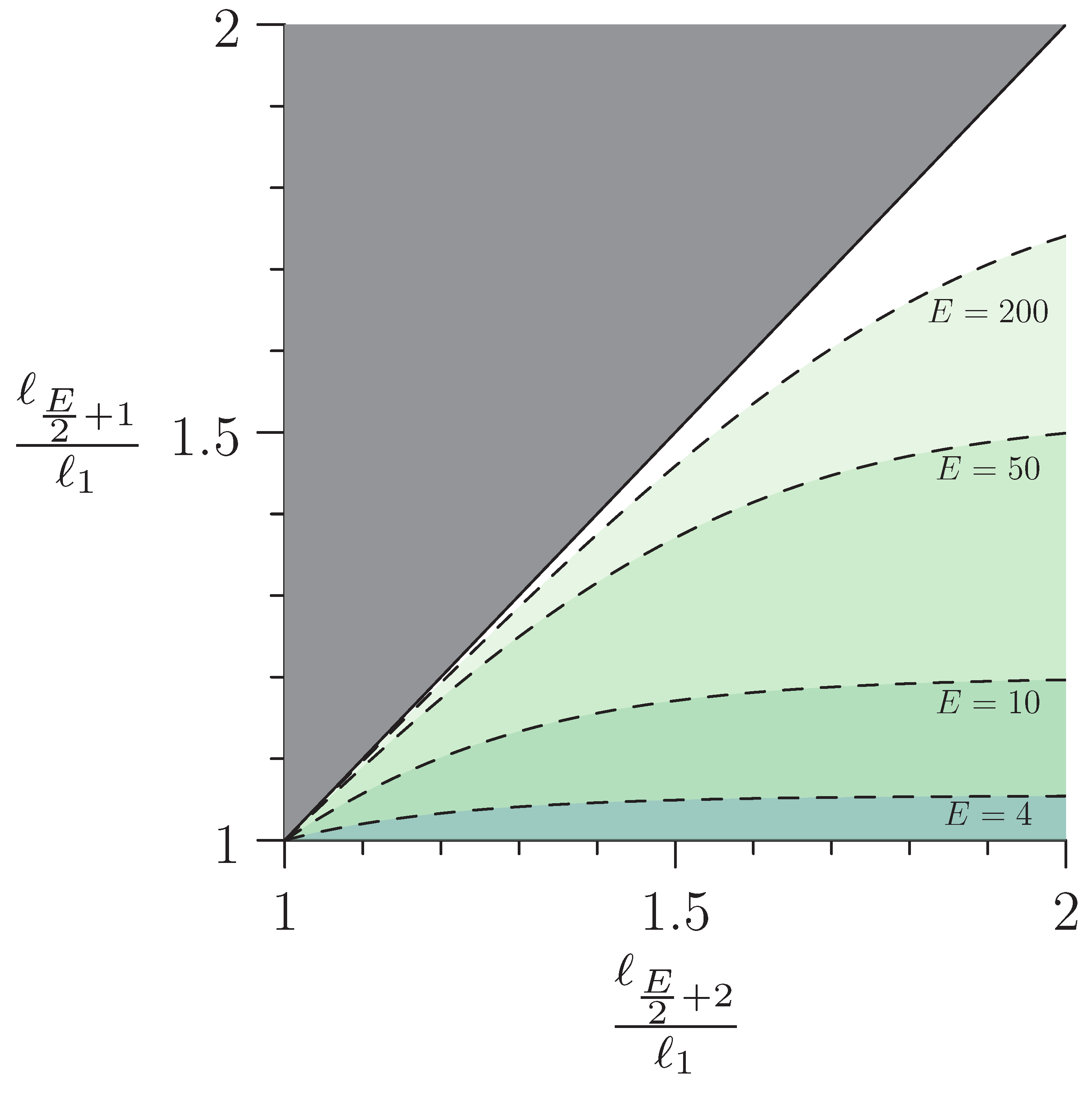
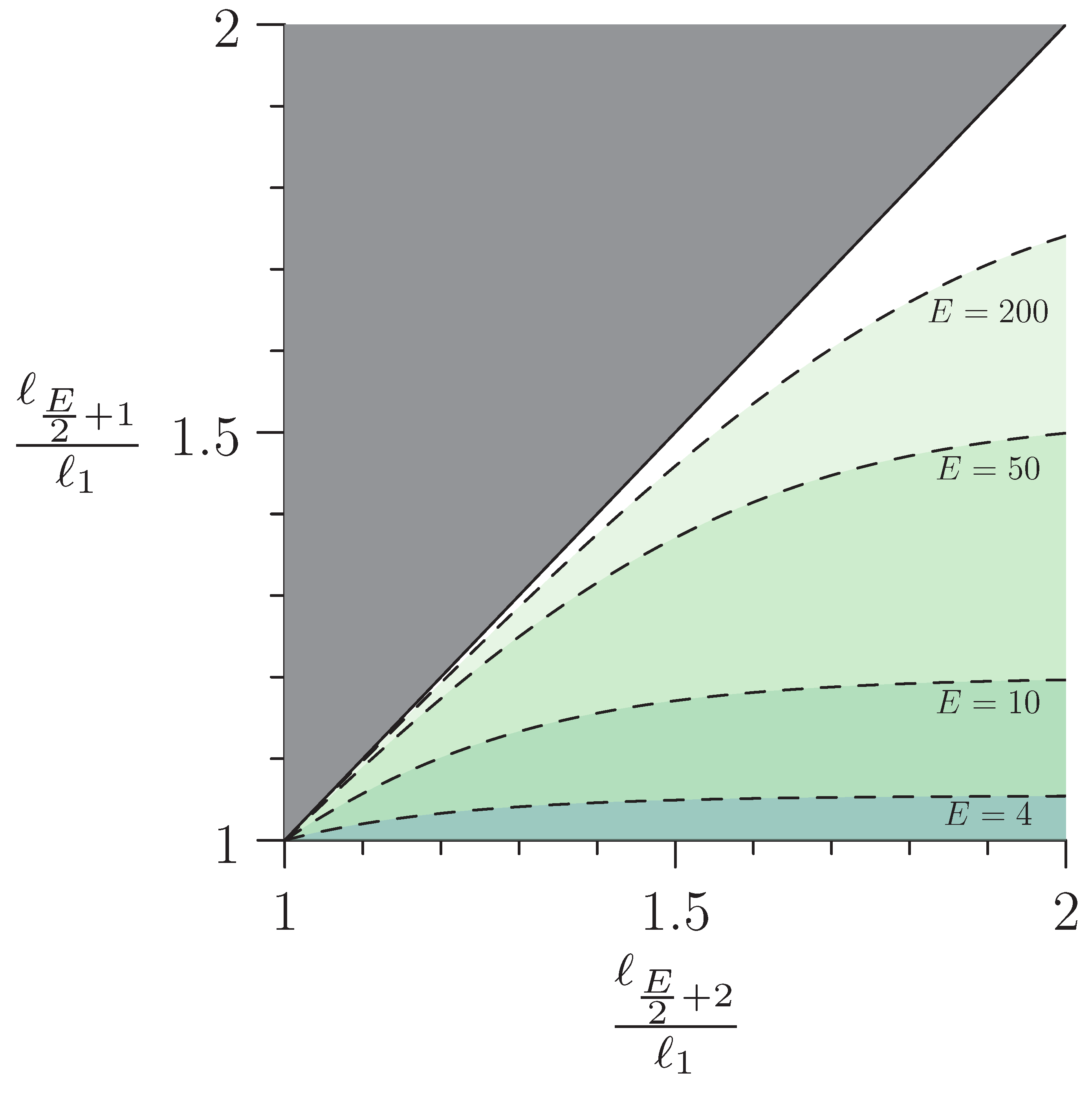
Note that the condition in this theorem for even number of edges involves only three edge lengths and can be stated in terms of two ratios that satisfy
(as we have ordered the edges by lengths). If the larger ratio
is given then one may always achieve this condition by choosing the other ratio sufficiently small (as
one has
and the left-hand side of condition (
5) grows without any bound).
Figure 2 shows a graph of the regions where the two length ratios satisfy condition (
5) for star graphs with
E edges. One can see how the condition becomes less restrictive when the number of edges is large. We will present the proof of Theorem 1 in
Section 4.1. The proof shows that the condition (
5) is not optimal. Less restrictive conditions that depend on other edge lengths may be stated. Nevertheless, we have chosen to state the condition (
5), as its form is probably more compactly phrased than other conditions would be.
Theorem 2. Let (attractive case). If there exists an integer such thatthen there exists a regular central Dirichlet solution for some positive value of the spectral parameter such that there is exactly one nodal domain on each edge, i.e., the nodal edge structure satisfies for all edges e. We will prove this theorem in
Section 4.2. One may extend Theorem 2 to find negative values of the spectral parameter
under appropriate conditions on edge lengths using similar ideas as the ones used in our proof for
. To keep the paper concise we focus here on
.
In order to demonstrate how the two conditions (
8) in Theorem 2 may be achieved, we point out that the following weaker conditions
imply (
8) (recalling that
). The conditions (
9) are easy to apply and they may be achieved straight-forwardly. For instance, if
E is odd and
(the largest possible value for
M) then the first inequality in (
9) is always satisfied and the second condition gives the restriction
on the ratio between the smallest and largest edge length. In addition to that one may easily construct a star graph with edge lengths which satisfy conditions (
9) above. This is done by starting from a star graph which has only two different edge lengths
where
for
and
for
. If one chooses the ratio of the lengths in the range
and then perturbs all edge lengths slightly to make them different then condition (
9) is satisfied. Note however that, just as in Theorem 1, even the condition which is stated in Theorem 2 is not optimal and more detailed conditions can be derived from our proof in
Section 4.2.
Before discussing some straight-forward implications let us also state here that the assumption that all edge lengths are different that we made for both Theorems 1 and 2 may be relaxed. This is because any two edges with the same length decouple in a certain way from the remaining graph. If one deletes pairs of edges of equal length from the graph until all edges in the remaining graph are different one may apply the theorems to the remaining graph (if the remaining graph has at least three edges). This will be discussed more in Remark 1.
In the remainder of this section we discuss the implications of the two theorems for finding solutions with a given nodal edge structure
. In this case we divide each edge length into
fractions
. The
n-th fraction
then corresponds to the length of one nodal domain. For the rest of this section we do not assume that the edge lengths
are ordered by length and different, rather we now assume that these assumptions apply to the fractions, i.e.,
(
). By first considering the metrically smaller star graph with edge lengths
Theorems 1 and 2 establish the existence of solutions on this smaller graph subject to conditions on the lengths
. These solutions can be extended straight-forwardly to a solution on the full star graph. Indeed, as we explain in more detail in
Section 3.1, the solution on each edge is a naturally periodic function given by an elliptic deformation of a sine and shares the same symmetry around nodes and extrema, as the sine function. The main relevant difference to a sine is that the period of the solution depends on the amplitude. In the repulsive case one then obtains the following.
Corollary 1. Let (repulsive case) and . If either
- 1.
E is odd, or
- 2.
E is even and the fractions () satisfy the condition (5),
then there exists a regular central Dirichlet solution for some positive value of the spectral parameter ‘with regular nodal edge count structure .
Similarly, Theorem 2 implies the following.
Corollary 2. Let (attractive case) and . If the fractions satisfy condition (8) then there exists a regular central Dirichlet solution for some positive value of the spectral parameter with regular nodal edge count structure . The corollaries above provide sufficient conditions for the existence of a central Dirichlet solution with a particular given nodal edge count. In addition to that, it is straight-forward to apply Theorems 1 and 2 to show that for any choice of edge lengths there are infinitely many E-tuples which can serve as the graph’s regular central Dirichlet nodal structure.
Moreover Theorems 1 and 2 also imply infinitely many values for non-regular nodal structures, as every non-regular solution is equivalent to a regular solution on a subgraph.
Finally, we note that the proofs of Theorems 1 and 2 in
Section 4 are constructive and they specify the corresponding solution up to a single parameter (which one may take to be
) that may easily be found numerically.
3. General Background on the Solutions of Nonlinear Quantum Star Graphs
Before we turn to the proof of Theorems 1 and 2 we would like discuss how the implied regular central Dirichlet solutions are related to the complete set of solutions of the nonlinear star graph. Though we are far from having a full understanding of all solutions we can give a heuristic picture.
3.1. The Nonlinear Interval - Solutions and Spectral Curves
Let us start with giving a complete overview of the solutions for the interval (i.e., the star graph with
). While these are well known and understood they play a central part in the construction of central Dirichlet solutions for star graphs in our later proof and serve as a good way to introduce some general background. On the half line
with a Dirichlet condition
at the origin it is straight-forward to check (see also [
14]) that the solutions for positive spectral parameters
(where
) are of the form
Here
and
are Jacobi elliptic functions with a deformation parameter
m. The definition of elliptic functions allows
m to take arbitrary values in the interval
(as there are many conventions for these functions we summarize ours in
Appendix A). Note that
is a deformed variant of the sine function and
and
.
For any spectral parameter there is a one-parameter family of solutions parameterised by the deformation parameter m. In the repulsive case the deformation parameter may take values (as for one obtains the trivial solution ) and in the attractive case (the expressions are not well defined for and for the expressions are no longer real).
Let us now summarise some properties of these solutions in the following proposition for the solutions of the NLS equation on the half line.
Proposition 1. The solutions given in Equation (10) have the following properties - 1.
All solutions are periodic with a nonlinear wavelengthwhere is the complete elliptic integral of first kind, Equation (7). - 2.
For one regains the standard relation for the free linear Schrödinger equation. In the repulsive case is an increasing function of m (at fixed k) that increases without bound as . In the attractive case is a decreasing function of m (at fixed k) with .
- 3.
The nodal points are separated by half the nonlinear wavelength. Namely, for .
- 4.
The solutions are anti-symmetric around each nodal point and symmetric around each extremum, i.e., it has the same symmetry properties as a sine function.
- 5.
As and the amplitudeis given by - 6.
As the amplitude of the solutions also decreases to zero for both the repulsive and the attractive case. In this case the effective strength of the nonlinear interaction becomes weaker and the oscillations are closer. In the repulsive case the amplitude remains bounded as with . In the attractive case grows without bound as .
All statements in this proposition follow straight-forwardly from the known properties of elliptic integrals and elliptic functions and we thus omit the proof here. Furthermore, some of the statements in the proposition are mentioned explicitly in [
14,
16,
17] and others follow easily from the definitions as given in the
Appendix A.
For the NLS equation for
on an interval
with Dirichlet conditions at both boundaries
one obtains a full set of solutions straight-forwardly from the solutions
on the half-line by requiring that there is a nodal point at
. Since the distance between two nodal points in
is
the length of the interval has to be an integer multiple of half the nonlinear wavelength
where the positive integer
n is the number of nodal domains. We arrive at the following proposition.
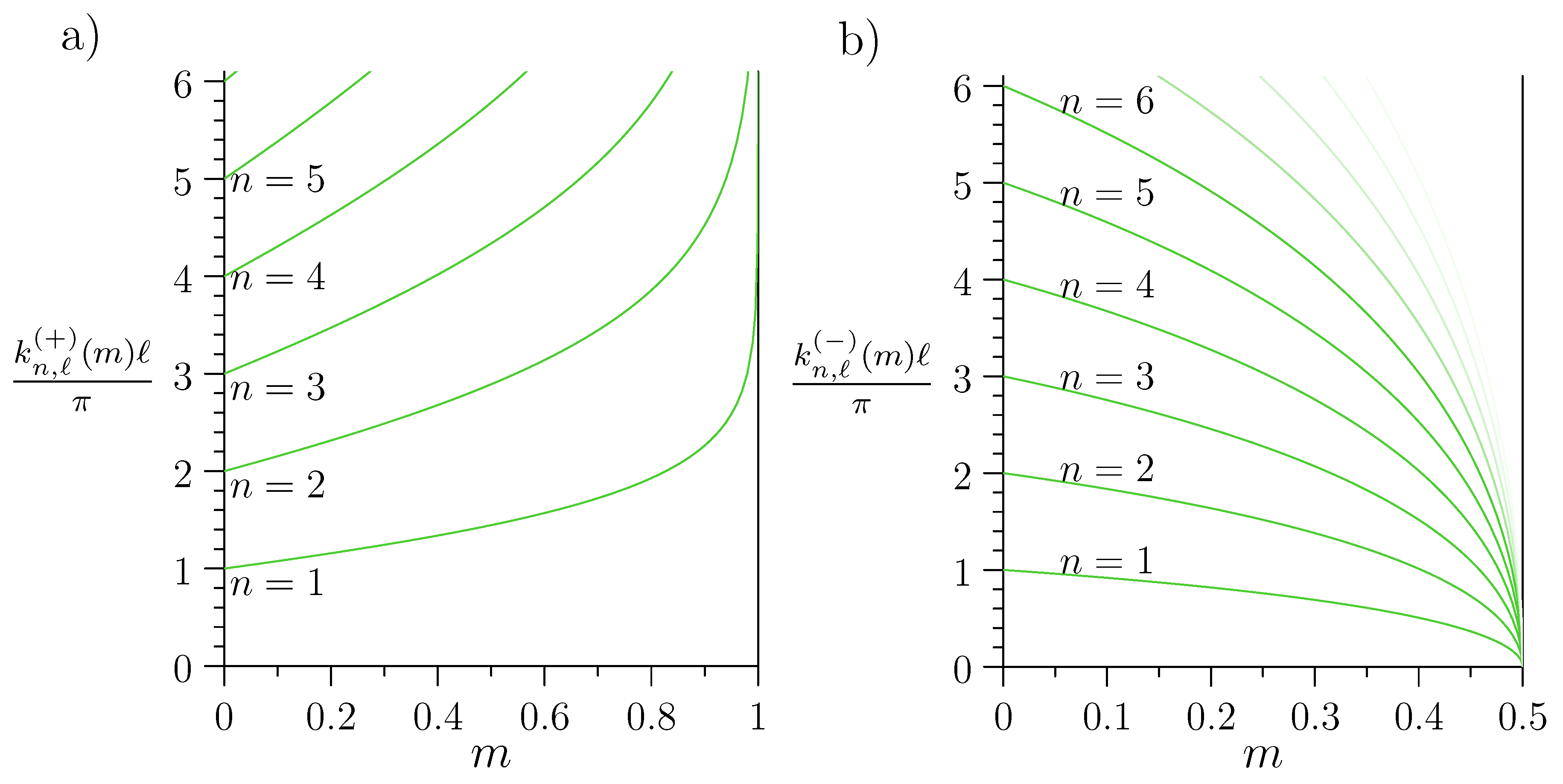
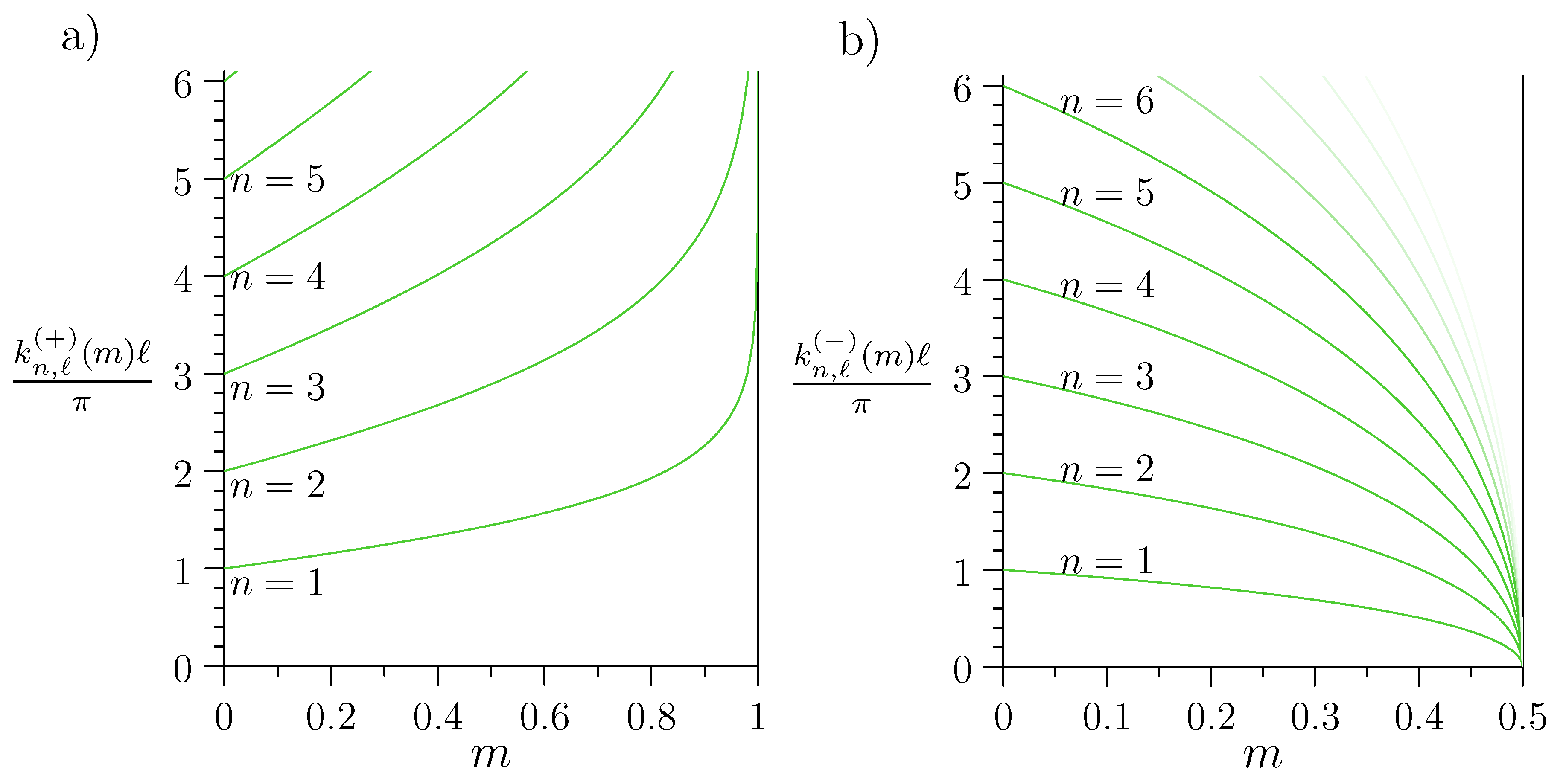
Proposition 2. The NLS Equation (1) on an interval of length ℓ with Dirichlet boundary conditions has a one-parameter family of real-valued solutions with n nodal domains, for each . The relation between the spectral parameter and the deformation parameter m is dictated by Equation (13) and may be explicitly written as We refer to
(or its implicitly defined inverse
) as spectral curves. As
, the spectral curves never cross (see
Figure 3) and we obtain the first nonlinear generalization of Sturm’s oscillation theorem as a corollary (see also Theorem 2.4 in [
16]).
Corollary 3. For any allowed value of the deformation parameter m ( for and for ) there is a discrete set of positive real numbers, increasingly ordered, such that is a solution of the NLS equation on the interval with spectral parameters and n is the number of nodal domains. Furthermore, these are all the solutions of the NLS equation whose deformation parameter equals m.
While this is mathematically sound, fixing the deformation parameter m is not a very useful approach in an applied setting. A more physical approach (and one that is useful when we consider star graphs) is to fix the -norm of the solutions. The -norm is a global measure for the strength of the nonlinearity. It has the physical meaning of an integrated intensity. In optical applications this is proportional to the total physical energy and for applications in Bose-Einstein condensates this is proportional to the number of particles.
By direct calculation (see [
15]) we express the
-norms in terms of elliptic integrals (see
Appendix A) as
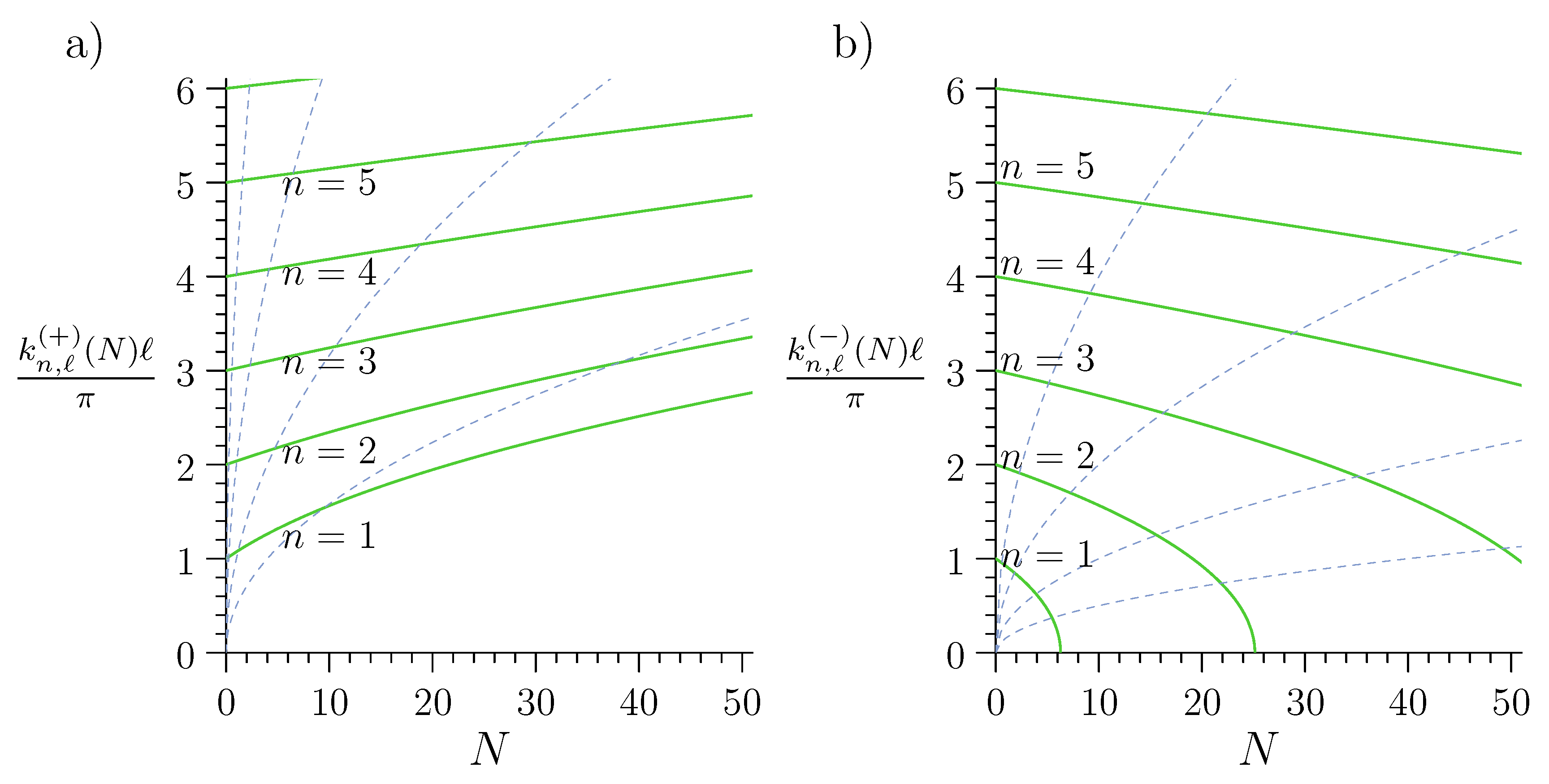
and use those to implicitly define the spectral curves in the form
. The latter spectral curves are shown in
Figure 4. The monotonicity of the spectral curves in this form follows from the monotonicity of
together with the monotonicity of
. More precisely, one may check that
in (
15) is an increasing function of
m in the corresponding interval
for
and
for
. To verify this statement, observe that
The inverse of
will be denoted
. Combining the monotonicity of
and
one finds in the repulsive case that
is an increasing function of
N defined for
while in the attractive case
is a decreasing function defined on
where
A characterization of the spectral curves
may be given as follows. We define the following flow in the
k-
N-plane (see
Figure 4).
where
and
are extensions of the expressions in Equations (
15) and (
14), replacing the integer valued
n with the real flow parameter
. Observe that
depends linearly on
whereas,
is proportional to
. This means that for each value of
m, the corresponding flow line
is of the form
(where
depends on
m). In particular, this implies that the spectral curves
are self-similar
In addition, each flow line traverses the spectral curves in the order given by the number of nodal domains n. This implies that the spectral curves never cross each other and remain properly ordered. We thus obtain the following second generalization of Sturm’s oscillation theorem on the interval.
Proposition 3. For (repulsive case) let and for (attractive case) let .
Then there is a discrete set of positive real numbers, increasingly ordered such that is a solution of the NLS equation on the interval with a spectral parameter and -norm and n is the number of nodal domains. Furthermore, these are all solutions whose -norm equals N. 3.2. Nonlinear Quantum Star Graphs
One may use the functions
defined in Equation (
10) in order to reduce the problem of finding a solution of the NLS equation on a star graph to a (nonlinear) algebraic problem. By setting
where an overall sign
and the deformation parameter
remain unspecified (and allowed to take different values on different edges) one has a set of
E functions that satisfy the NLS equation with spectral parameter
on each edge and also satisfy the Dirichlet condition
at the boundary vertices. Setting
(unless
) the Kirchhoff matching conditions at the centre give a set of
E independent nonlinear algebraic equations (see Equations (
2) and (
3)) for
E continuous parameters
. If
k is fixed there are typically discrete solutions for the parameters
. As
k varies the solutions deform and form one-parameter families. Setting
each solution may be characterized by a pair
and as
k is varied one naturally arrives at spectral curves in the
k-
N-plane, that may be expressed as
(or
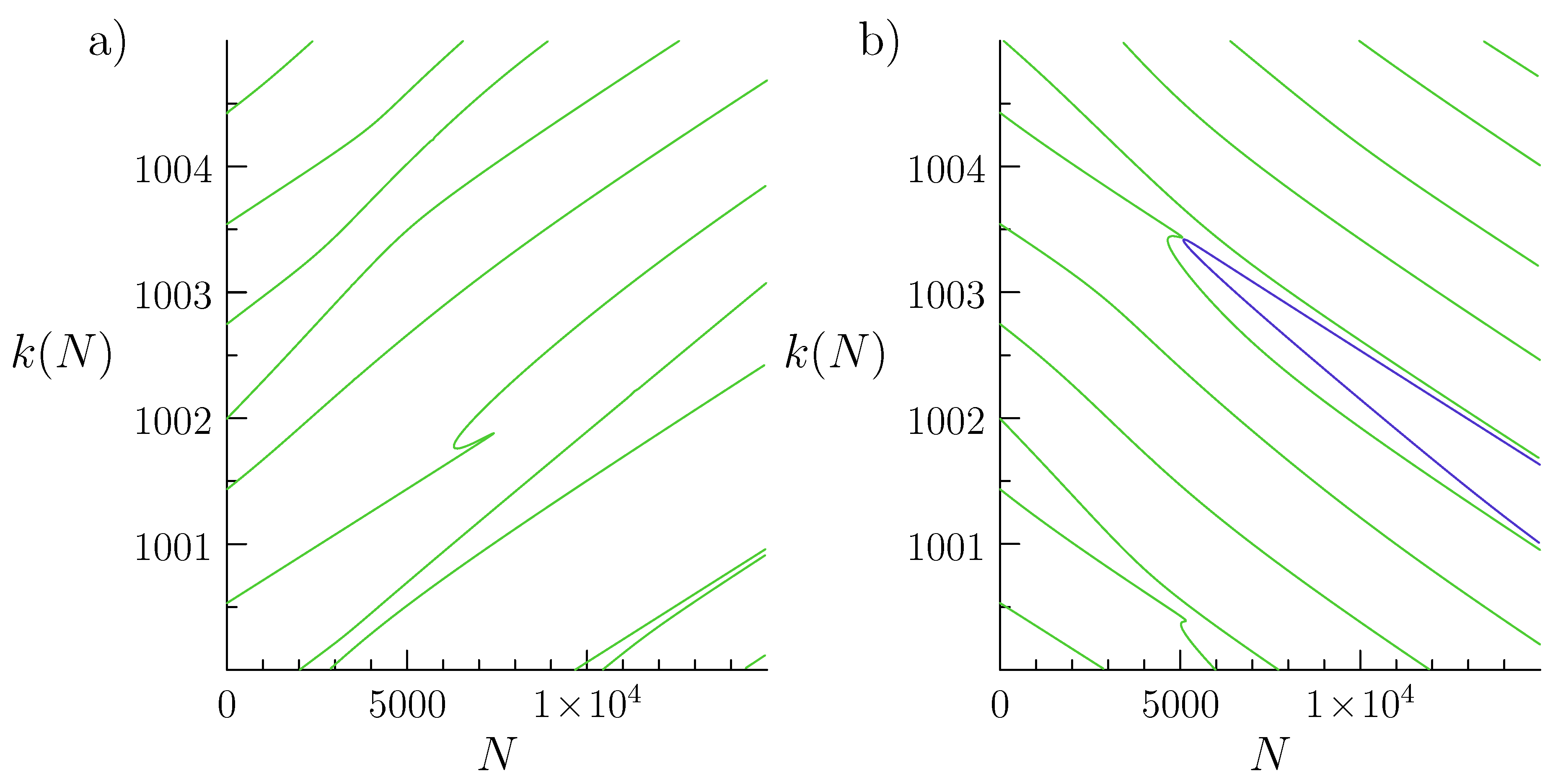
), as we have seen for the interval in the previous section. Nevertheless, the spectral curves of the star graph have a more intricate structure (see
Figure 5). In non-linear algebraic equations one generally expects that solutions appear or disappear in bifurcations. For any particular example some numerical approach is needed to find the spectral curves. To do so, one first needs to have some approximate solution (either found by analytical approximation or by a numerical search in the parameter space). After that Newton-Raphson methods may be used to find the solution up to the desired numerical accuracy and the spectral curves are found by varying the spectral parameter slowly.
Figure 5 shows spectral curves that have been found numerically for a star graph with
and edge lengths
(
). Most of the curves have been found starting from the corresponding spectrum of the linear problem (
). Yet, one can see an additional curve that does not connect to the linear spectrum as
. This has originally been found in previous work [
15] by coincidence, as the the numerical method jumped from one curve to another where they almost touch in the diagram.
We stress that in a numerical approach it is very hard to make sure that all solutions of interest are found, even if one restricts the search to a restricted region in parameter space. A full characterization of all solutions (such as given above for the nonlinear interval) will generally be elusive even for basic nonlinear quantum graphs. Theorems 1 and 2 and the related Corollaries 1 and 2 establish the existence of a large set of solutions inside the deep nonlinear regime. Each of these solutions may be used as a starting point for a numerical calculation of further solutions along the corresponding spectral curves.
3.3. Nodal Edge Counting and Central Dirichlet Solutions
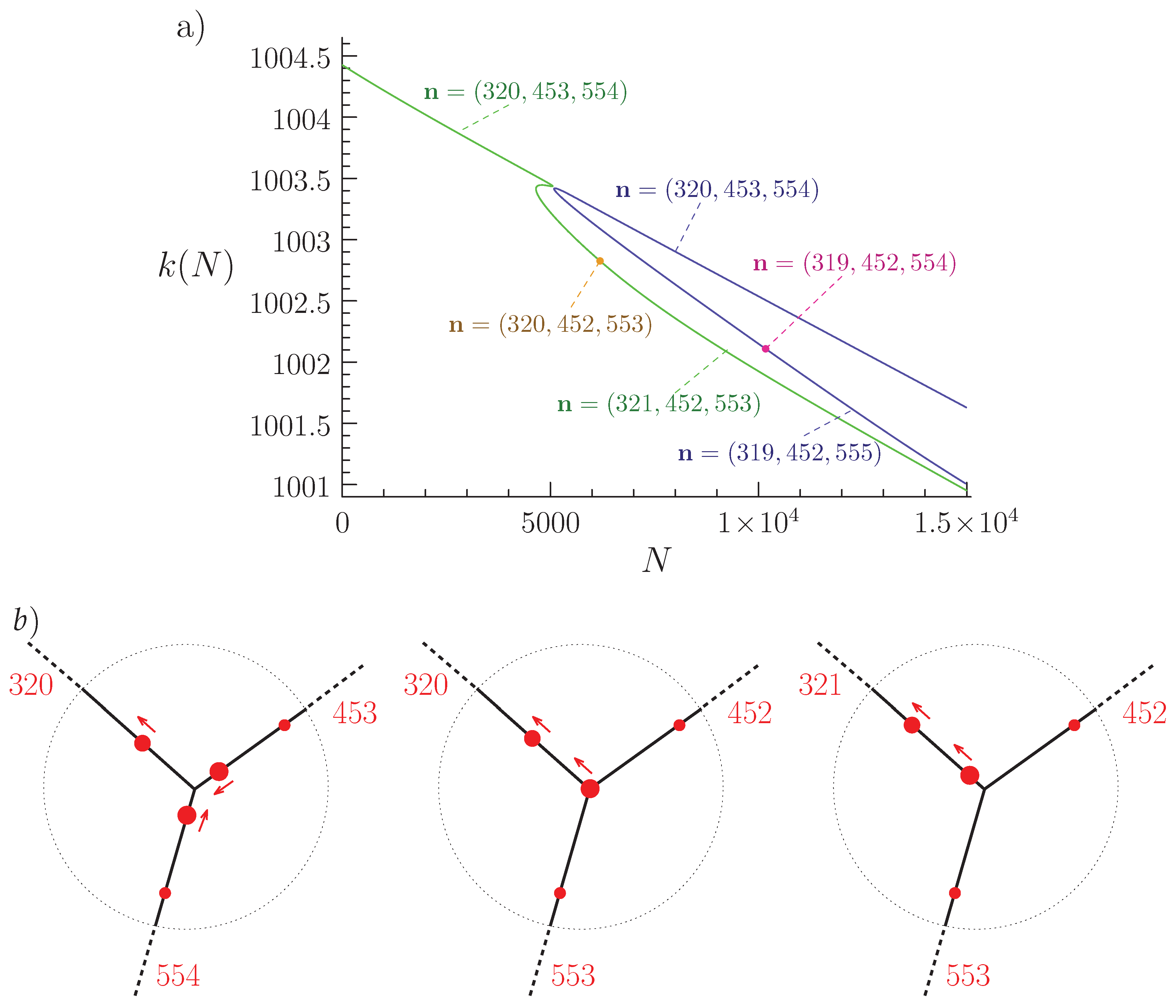
It is interesting to consider the nodal structure along a spectral curve. Generically the wavefunction does not vanish at the centre and the nodal edge count structure (i.e., the vector
) remains constant along the curve. The existence of central Dirichlet solutions implies that nodal points may move into (and through) the centre along a spectral curve (see also Theorem 2.9, [
16]). At this instance the nodal edge count structure changes twice; first when the node hits the centre and then again when it has moved through. If
is the nodal edge count structure at a central Dirichlet solution, then generically the value of the function at the centre will change its sign along the spectral curve close to the central Dirichlet solution. If
and
are the nodal edge count structures close to the central Dirichlet solution then their entries differ at most by one
and when the nodal point hits the centre one has
. This is shown in more detail for a numerical example in
Figure 6, where some central Dirichlet solutions are indicated on the spectral curves. The figure also shows the relevance of the central Dirichlet solutions for finding numerical solutions. The central Dirichlet solutions can be constructed directly using the machinery of the proof in the next section. From that one can then obtain a full spectral curve numerically by varying the parameters appropriately.
4. Proofs of Main Theorems
We prove the two theorems for repulsive and attractive interaction separately. The main construction is however the same. We start by describing the idea behind the construction and then turn to the actual proofs. Let
be the functions describing the deformation parameter of solutions on the interval of length
ℓ with Dirichlet boundary conditions and a single nodal domain (they are given as the inverse of Equation (
14); see also the lowest curve in
Figure 3). Those functions are well-defined for
in the repulsive case and for
in the attractive case. Using these, we define
for
, and where
are signs that will be specified later. These are of course just the solutions of the NLS with one nodal domain on the corresponding interval at spectral parameter
. In order to ensure that this function is well defined on all edges at given
k we have to choose
in the repulsive case and
in the attractive case (recall that we ordered the edge lengths by
).
As by construction, the set defines a continuous function on the graph including the centre for all allowed values of k. However, in general, these functions do not satisfy the remaining Kirchhoff condition . The idea of the proofs is the following. We consider as a function of k and need to show that it vanishes at some . We find a particular set of signs for which it is easy to show that changes sign as k is varied within its allowed range. Since this function is continuous in k it must vanish somewhere, which establishes the required central Dirichlet solution with exactly one nodal domain on each edge.
As we recognized above the role which the derivative of the solution plays in the proof, let us now directly calculate it.
In particular, expressing the derivative as a function of m and k and multiplying by a factor , we see that the resulting function does not depend explicitly on k, but only via the deformation parameter, m.
Remark 1. In the statement of the theorem we have assumed that all edge lengths are different and stated how this may be relaxed in a subsequent remark. We can explain this now in more detail. Assume that we have two edge lengths that coincide. Denote those edges by and follow the construction above. By choosing opposite sign for the two edges the contribution of the two edges to the sum of derivatives cancels exactly for all allowed values of k, that is . One may then focus on the subgraph where the two edges are deleted and continue to construct a solution on the subgraph.
One may also start with a graph with different edge lengths. If one has found any regular central Dirichlet solution on the graph one may add as many pairs of edges of the same length and find a regular non-Dirichlet solution on the larger graph following the above construction.
4.1. The Repulsive Case :
Proof of Theorem 1. Using the construction defined above we have to establish that there is a choice for the signs
and value for the spectral parameter
such that the Kirchhoff condition
is satisfied. For
let us define the function
where
was defined in Equation (
22) and
is the inverse of
as defined in Equation (
14) (setting
for one nodal domain). The Kirchhoff condition is equivalent to the condition
for some
.
To continue the proof, we point out some monotonicity properties of
and
. These properties may be easily verified by direct calculation using Equations (
14) and (
22). For
the functions
and
are strictly increasing and
This implies that
is strictly increasing for
and
If
is odd we choose the signs
to satisfy the following conditions
and
Such a choice of signs is always possible as
for all
. We then get by Equations (
27) and (
28) that
. By continuity there exists
such that
for the given choice of signs. This proves the theorem for odd
E.
For an even number of edges () one needs to do a little bit more work. In this case, there are two strategies for choosing signs, , and showing that vanishes for some k.
One may choose more negative signs than positive signs so that . Then is trivially negative. The difficulty here is in showing that such a choice is consistent with . This generally leads to some conditions which the edge lengths should satisfy.
One may choose as many positive as negative signs, which makes it easier to satisfy (i.e., the conditions on the edge lengths are less restrictive). Yet, the difficulty here lies in , which means that one needs to show that this limit is approached from the negative side (i.e., find the conditions on the edge lengths which ensures this).
These two strategies give some indication on how our proof may be generalized beyond the stated length restrictions. Moreover, they also give a practical instruction for how one may search for further solutions numerically.
We continue the proof by following the second strategy and setting
so that
. One then has
and we will show that the leading term in the (convergent) asymptotic expansion of
for large
k is negative. Using the known asymptotics [
17] of the elliptic integral
as
goes to one (or
)
one may invert Equation (
24) asymptotically for large
k as
and, thus
This directly leads to the asymptotic expansion
which is negative for sufficiently large
k because
is the shortest edge length.
It is left to show .
For this let us write
for each term. As
the condition
is equivalent to
using our choice of the signs, Equation (
30). Since
and
are increasing functions and
, condition (
35) is certainly satisfied if
The condition (
36) restricts the three edge lengths
,
and
and it is equivalent to the condition (
5) stated in the theorem. Indeed, this is trivial for the right-hand side where
. For the left-hand side note that Equation (
6) in Theorem 1 identifies
and
such that the left-hand-side of the stated condition (
5) in the theorem and the left-hand side of Equation (
36) are identical when written out explicitly. □
4.2. The Attractive Case :
Proof of Theorem 2. In the attractive case we can start similarly to the previous proof by rewriting the Kirchhoff condition on the sum of derivatives as
for some
where
The additional factor
is irrelevant for satisfying the condition but allows us to extend the definition of the function to
(where
). Noting that
is a decreasing function for
with
and
and
is increasing with
m we get that the function
is a decreasing function for
and
Altogether this implies that
and
Now let us assume that the two conditions (
8) stated in Theorem 2 are satisfied and let us choose (for
as is given in the condition of the theorem)
Then
and the right inequality of (
8) directly implies that
.
In order to prove the existence of the solution stated in Theorem 2, it is left to show that
, which would imply that
vanishes for some
. Using our choice of signs and the identity
we may rewrite Equation (
39) as
As
is an increasing function for
and
is a decreasing function of its argument the left inequality in Equation (
8) implies
where
and
. The same monotonicity argument implies that the negative contributions in Equation (
42) are smaller than the left-hand side of inequality Equation (
43) and that the positive contributions in Equation (
42) are larger than the right-hand side of inequality Equation (
43). Thus Equation (
43) implies
, as required. □


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}