An Overview on the Standing Waves of Nonlinear Schrödinger and Dirac Equations on Metric Graphs with Localized Nonlinearity


Abstract
:1. Introduction
2. Nonlinear Schrödinger Equation
2.1. Ground States
2.1.1. The Subcritical Case:
- (1)
- if , then there exists a ground state for every ;
- (2)
- if , then:
- (i)
- wheneverwhere N is the number of half-lines of andthere exists a ground state of mass μ;
- (ii)
- wheneverthere does not exist any ground state of mass μ.
2.1.2. The Critical Case:
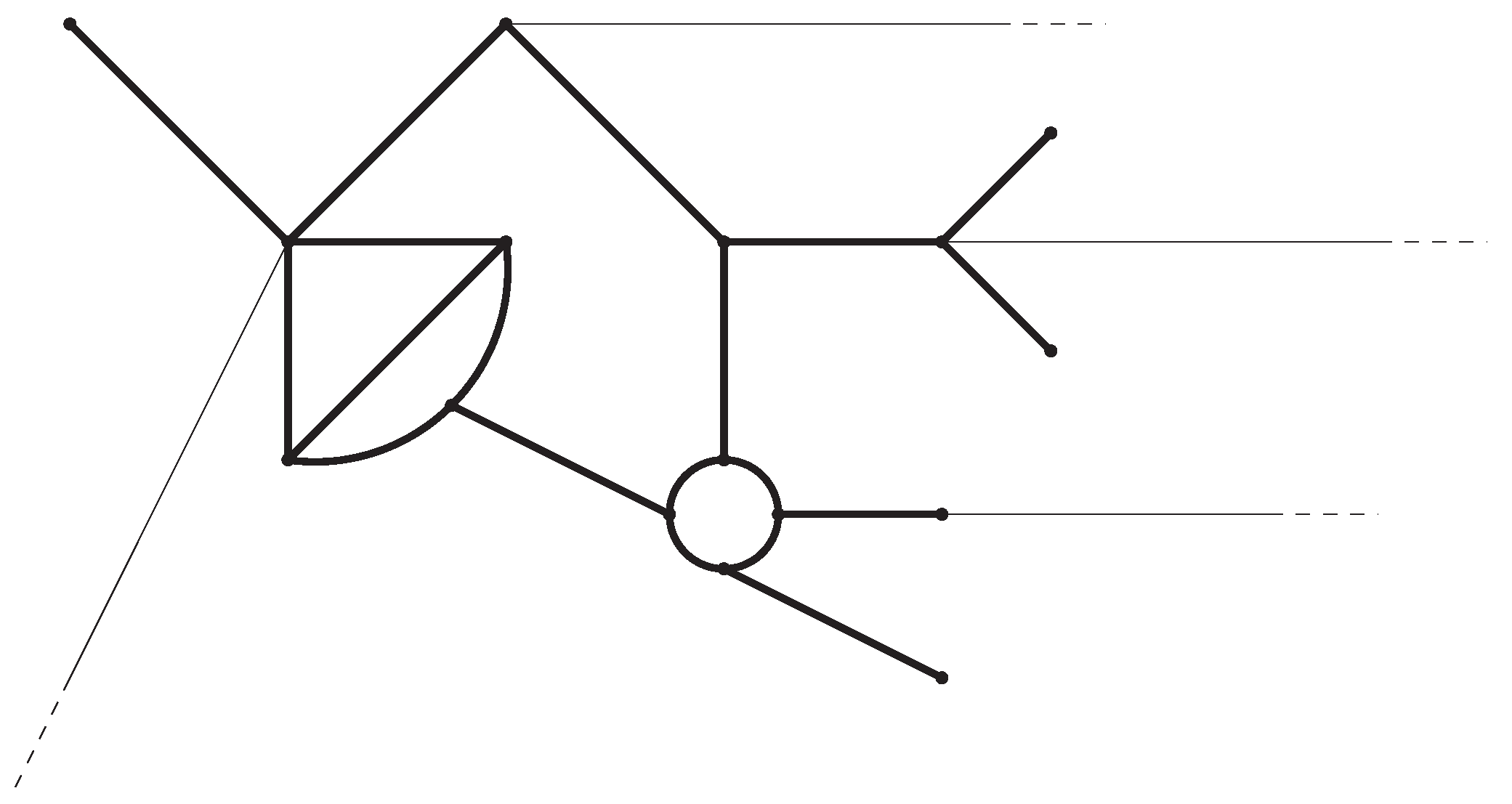
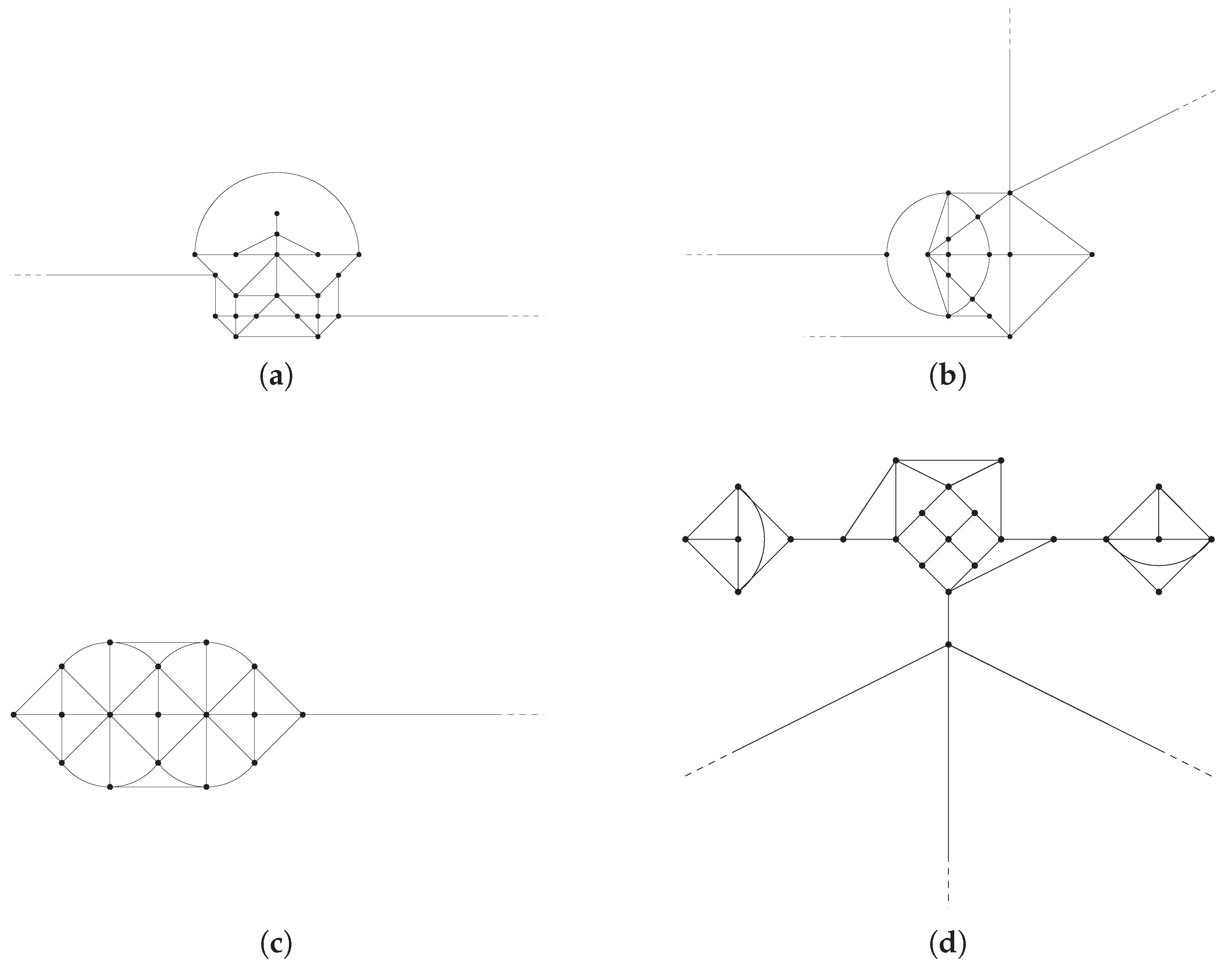
- a graph is said to admit a cycle-covering if and only if every edge of belongs to a cycle, namely either a loop (i.e., a closed path of consecutive bounded edges) or an unbounded path joining the endpoints of two distinct half-lines (which are then identified as a single vertex at infinity);
- a graph is said to possesses a terminal edge if and only if it contains an edge ending with a vertex of degree one.
- (i)
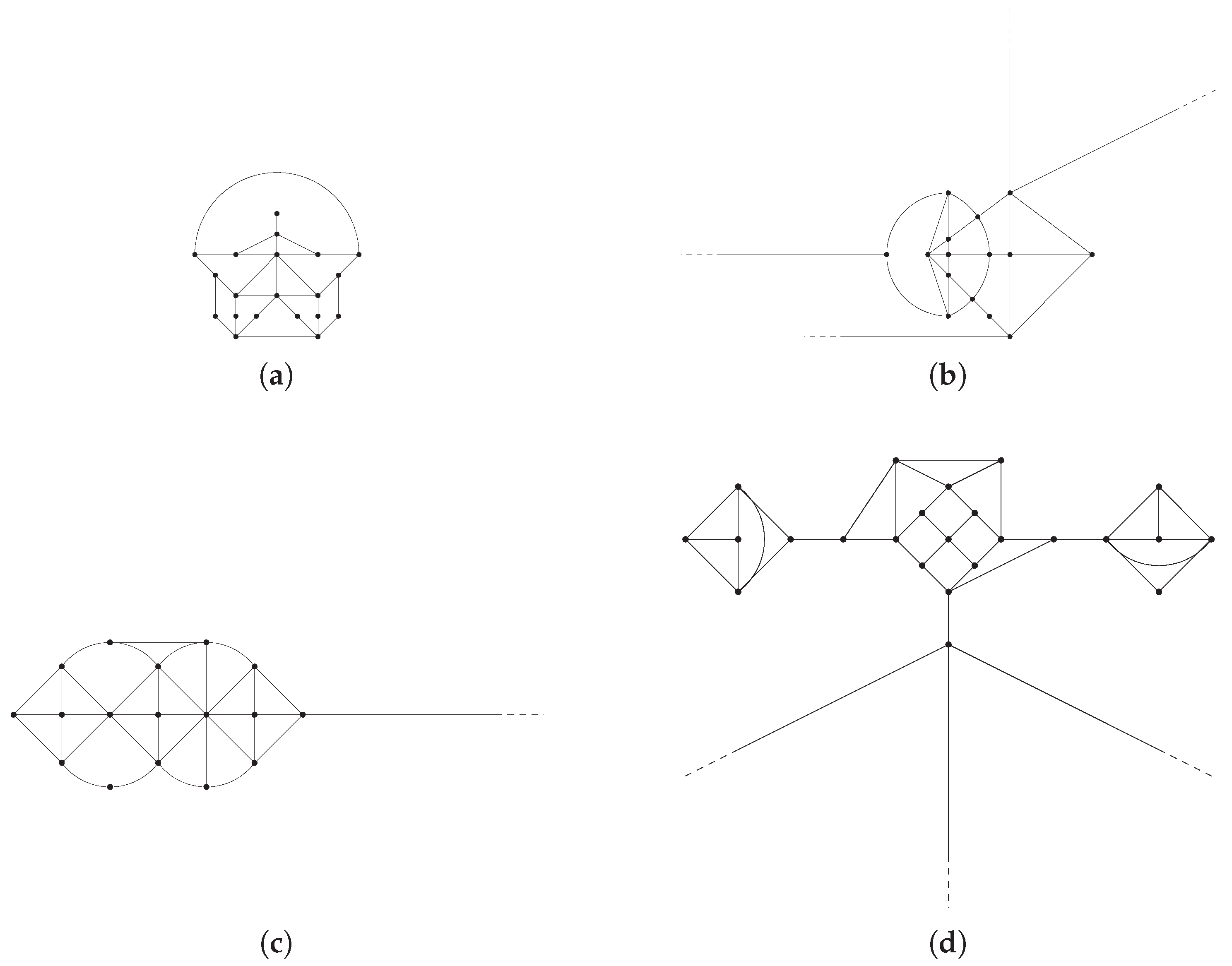
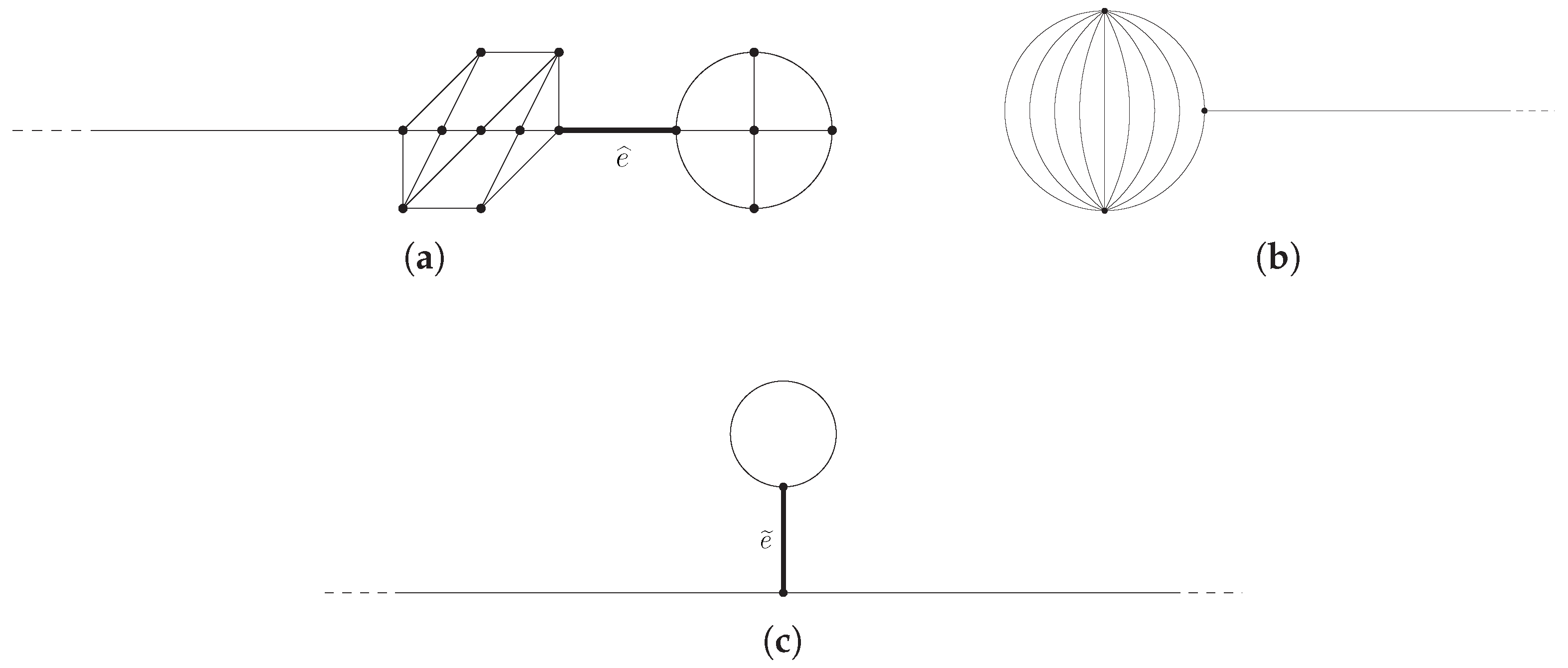
- if has at least a terminal edge (as, for instance, in Figure 6a), thenand there is no ground state of mass μ for any ;
- (ii)
- if admits a cycle-covering (as, for instance, in Figure 6b), thenand there is no ground state of mass μ for any ;
- (iii)
- if has only one half-line and no terminal edges (as, for instance, in Figure 6c), thenand there is a ground states of mass μ if and only if .
- (iv)
- if has no terminal edges, does not admit a cycle-covering, but presents at least two half-lines (as, for instance, in Figure 6d), thenand there is a ground states of mass μ if and only if , provided that .
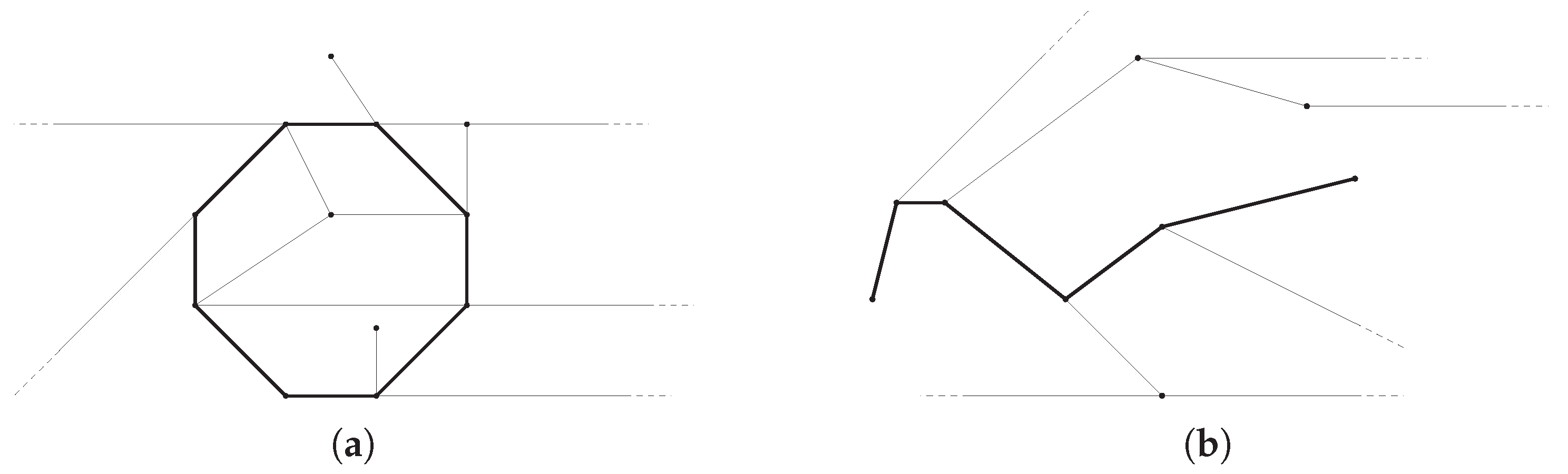
- (1)
- (2)
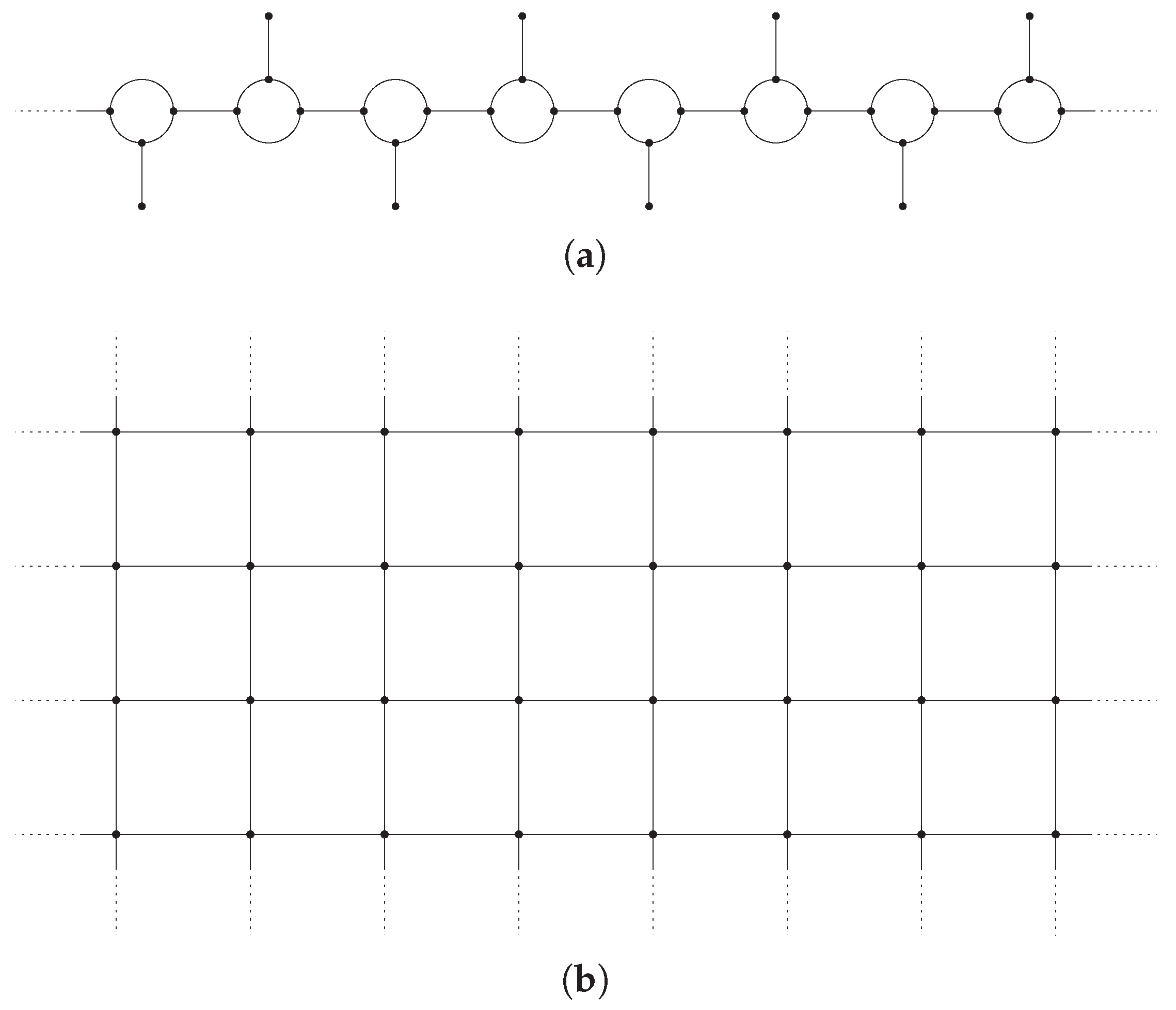
- the sequence can be constructed by considering a graph as in Figure 7b and letting the length of the compact core go to infinity keeping at the same time the total diameter of the compact core bounded (namely, thickening the compact core);
- (3)
- the sequences can be constructed by considering a signpost graph (see, e.g., Figure 7c) and letting the length of its cut-edge go to infinity and to zero, respectively.
2.2. Bound States
2.2.1. Existence Results
- detecting the energy levels at which the Palais-Smale condition is satisfied, namely detect the values such that any sequence satisfying
- (i)
- (ii)
(with denoting the topological dual of the tangent to the manifold at ) admits a subsequence converging in ; - constructing suitable min-max levels.
2.2.2. Nonexistence Results
- (i)
- if the graph satisfiesthen, there are no bound states of mass μ with ;
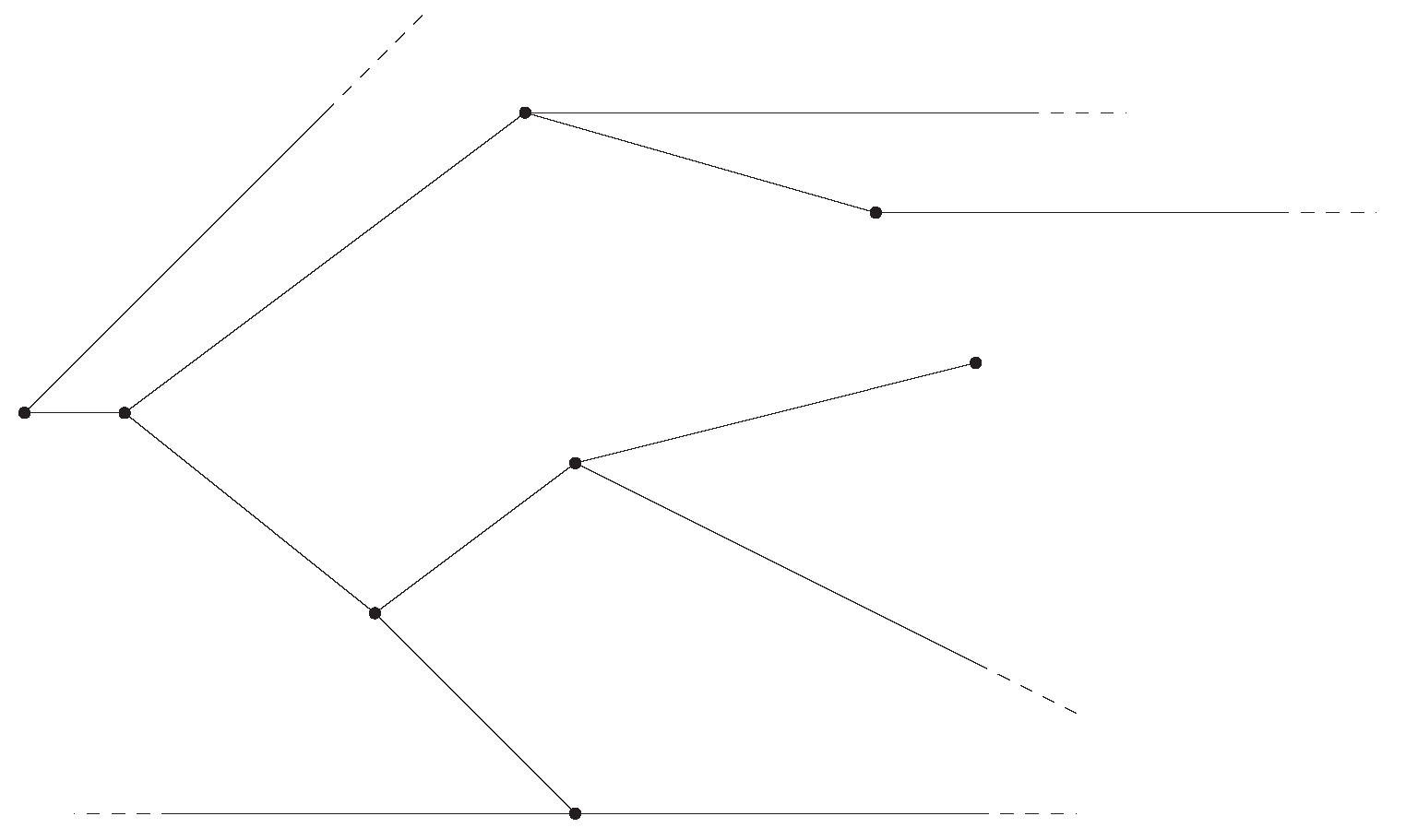
- (ii)
- if is a tree (i.e., no loops) with at most one pendant (see, e.g., Figure 8), then there is no bound state of mass μ with , for every .
3. Nonlinear Dirac Equation
3.1. Remarks on the Dirac Operator on Graphs
3.2. Bound States
4. Nonrelativistic Limit
5. Conclusion: A Brief Summary
- (i)
- the mentioned results only concerne the “free” self-adjoint extensions of the Laplacian and the Dirac operator introduced in Section 1 and Section 3.1, respectively;
- (ii)
- in order to find bound states, in the NLS case one fixes the mass μ and studies constrained critical points of the energy functional (thus providing no information on the frequencies λ that arise naturally as Lagrange multipliers), while in the NLD case one fixes the frequency ω and discusses the connected action functional (thus losing any information on the mass of the resulting critical points);
- (iii)
- the nonrelativistic limit must be considered (as above) a limit for a sequence of relativistic parameters and a suitably “tuned” sequence of frequencies ;
- (iv)
- since (clearly) a ground state is a bound state too, the fourth column of the Table 1 must be meant to refer to those bound states which are not ground states;
- (v)
- the constants are defined by: (with introduced in Theorem 1–item (i)) and (with introduced in (10)–(11));
- (vi)
Author Contributions
Funding
Conflicts of Interest
References
- Adami, R.; Serra, E.; Tilli, P. NLS ground states on graphs. Calc. Var. Part. Differ. Equ. 2015, 54, 743–761. [Google Scholar] [CrossRef]
- Berkolaiko, G.; Kuchment, P. Introduction to Quantum Graphs; Mathematical Surveys and Monographs, 186; American Mathematical Society: Providence, RI, USA, 2013; ISBN 978-0-8218-9211-4. [Google Scholar]
- Adami, R.; Serra, E.; Tilli, P. Nonlinear dynamics on branched structures and networks. Riv. Math. Univ. Parma (N.S.) 2017, 8, 109–159. [Google Scholar]
- Gnutzmann, S.; Waltner, D. Stationary waves on nonlinear quantum graphs: General framework and canonical perturbation theory. Phys. Rev. E 2016, 93, 032204. [Google Scholar] [CrossRef] [PubMed]
- Noja, D. Nonlinear Schrödinger equation on graphs: Recent results and open problems. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2014, 372, 20130002. [Google Scholar] [CrossRef]
- Lorenzo, M.; Lucci, M.; Merlo, V.; Ottaviani, I.; Salvato, M.; Cirillo, M.; Müller, F.; Weimann, T.; Castellano, M.G.; Chiarello, F.; et al. On Bose-Einstein condensation in Josephson junctions star graph arrays. Phys. Lett. A 2014, 378, 655–658. [Google Scholar] [CrossRef]
- Adami, R.; Cacciapuoti, C.; Finco, D.; Noja, D. Fast solitons on star graphs. Rev. Math. Phys. 2011, 23, 409–451. [Google Scholar] [CrossRef]
- Adami, R.; Cacciapuoti, C.; Finco, D.; Noja, D. On the structure of critical energy levels for the cubic focusing NLS on star graphs. J. Phys. A 2012, 45, 3738–3777. [Google Scholar] [CrossRef]
- Adami, R.; Cacciapuoti, C.; Finco, D.; Noja, D. Variational properties and orbital stability of standing waves for NLS equation on a star graph. J. Differ. Equ. 2014, 257, 3738–3777. [Google Scholar] [CrossRef]
- Adami, R.; Cacciapuoti, C.; Finco, D.; Noja, D. Constrained energy minimization and orbital stability for the NLS equation on a star graph. Ann. Inst. H Poincaré Anal. Non Linéaire 2014, 31, 1289–1310. [Google Scholar] [CrossRef]
- Adami, R.; Serra, E.; Tilli, P. Threshold phenomena and existence results for NLS ground states on metric graphs. J. Funct. Anal. 2016, 271, 201–223. [Google Scholar] [CrossRef]
- Adami, R.; Serra, E.; Tilli, P. Negative energy ground states for the L2-critical NLSE on metric graphs. Commun. Math. Phys. 2017, 352, 387–406. [Google Scholar] [CrossRef]
- Adami, R.; Serra, E.; Tilli, P. Multiple positive bound states for the subcritical NLS equation on metric graphs. Calc. Var. Part. Diff. Equ. 2019, 58. [Google Scholar] [CrossRef]
- Cacciapuoti, C.; Finco, D.; Noja, D. Topology-induced bifurcations for the nonlinear Schrödinger equation on the tadpole graph. Phys. Rev. E 2015, 91, 013206. [Google Scholar] [CrossRef] [PubMed]
- Kairzhan, A.; Pelinovsky, D.E. Nonlinear instability of half-solitons on star graphs. J. Differ. Equ. 2018, 264, 7357–7383. [Google Scholar] [CrossRef]
- Noja, D.; Pelinovsky, D.; Shaikhova, G. Bifurcations and stability of standing waves in the nonlinear Schrödinger equation on the tadpole graph. Nonlinearity 2015, 28, 2343–2378. [Google Scholar] [CrossRef]
- Noja, D.; Rolando, S.; Secchi, S. Standing waves for the NLS on the double-bridge graph and a rational-irrational dichotomy. J. Differ. Equ. 2019, 266, 147–178. [Google Scholar] [CrossRef]
- Cacciapuoti, C.; Finco, D.; Noja, D. Ground state and orbital stability for the NLS equation on a general starlike graph with potentials. Nonlinearity 2017, 30, 3271–3303. [Google Scholar] [CrossRef]
- Gnutzmann, S.; Smilansky, U.; Derevyanko, S. Stationary scattering from a nonlinear network. Phys. Rev. A 2011, 83, 033831. [Google Scholar] [CrossRef]
- Serra, E.; Tentarelli, L. Bound states of the NLS equation on metric graphs with localized nonlinearities. J. Differ. Equ. 2016, 260, 5627–5644. [Google Scholar] [CrossRef]
- Serra, E.; Tentarelli, L. On the lack of bound states for certain NLS equations on metric graphs. Nonlinear Anal. 2016, 145, 68–82. [Google Scholar] [CrossRef]
- Tentarelli, L. NLS ground states on metric graphs with localized nonlinearities. J. Math. Anal. Appl. 2016, 433, 291–304. [Google Scholar] [CrossRef]
- Dovetta, S.; Tentarelli, L. Ground states of the L2-critical NLS equation with localized nonlinearity on a tadpole graph. arXiv, 2018; arXiv:1803.09246. [Google Scholar]
- Dovetta, S.; Tentarelli, L. L2-critical NLS on noncompact metric graphs with localized nonlinearity: Topological and metric features. arXiv, 2018; arXiv:1811.02387. [Google Scholar]
- Cacciapuoti, C.; Dovetta, S.; Serra, E. Variational and stability properties of constant solutions to the NLS equation on compact metric graphs. Milan J. Math. 2018, 86, 305–327. [Google Scholar] [CrossRef]
- Dovetta, S. Existence of infinitely many stationary solutions of the L2-subcritical and critical NLSE on compact metric graphs. J. Differ. Equ. 2018, 264, 4806–4821. [Google Scholar] [CrossRef]
- Duca, A. Global exact controllability of the bilinear Schrödinger potential type models on quantum graphs. arXiv, 2017; arXiv:1710.06022. [Google Scholar]
- Marzuola, J.L.; Pelinovsky, D.E. Ground state on the dumbbell graph. Appl. Math. Res. Express AMRX 2016, 98–145. [Google Scholar] [CrossRef]
- Adami, R.; Dovetta, S.; Serra, E.; Tilli, P. Dimensional crossover with a continuum of critical exponents for NLS on doubly periodic metric graphs. arXiv, 2018; arXiv:1805.02521. [Google Scholar]
- Dovetta, S. Mass-constrained ground states of the stationary NLSE on periodic metric graphs. arXiv, 2018; arXiv:1811.06798. [Google Scholar]
- Gilg, S.; Pelinovsky, D.E.; Schneider, G. Validity of the NLS approximation for periodic quantum graphs. NoDEA Nonlinear Differ. Equ. Appl. 2016, 23, 63. [Google Scholar] [CrossRef]
- Pelinovsky, D.E.; Schneider, G. Bifurcations of standing localized waves on periodic graphs. Ann. Henri Poincaré 2017, 18, 1185–1211. [Google Scholar] [CrossRef]
- Mugnolo, D.; Noja, D.; Seifert, C. Airy-type evolution equations on star graphs. Anal. PDE 2018, 11, 1625–1652. [Google Scholar] [CrossRef]
- Musslimani, Z.H.; Makris, K.G.; El-Ganainy, R.; Christodoulides, D.N. Optical solitons in PT periodic potentials. Phys. Rev. Lett. 2008, 100, 030402. [Google Scholar] [CrossRef] [PubMed]
- Ablowitz, M.J.; Musslimani, Z.H. Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 2013, 110, 064105. [Google Scholar] [CrossRef] [PubMed]
- Ablowitz, M.J.; Musslimani, Z.H. Integrable nonlocal nonlinear equation. Stud. Appl. Math. 2017, 139, 7–59. [Google Scholar] [CrossRef]
- Kurasov, P.; Majidzadeh Garjani, B. Quantum graphs: PT -symmetry and reflection symmetry of the spectrum. J. Math. Phys. 2017, 58, 023506. [Google Scholar] [CrossRef]
- Matrasulov, D.U.; Sabirov, K.K.; Yusupov, J.R. PT-symmetric quantum graphs. arXiv, 2018; arXiv:1805.08104. [Google Scholar]
- Borrelli, W.; Carlone, R.; Tentarelli, L. Nonlinear Dirac equation on graphs with localized nonlinearities: Bound states and nonrelativistic limit. arXiv, 2018; arXiv:1807.06937. [Google Scholar]
- Haddad, L.H.; Carr, L.D. The nonlinear Dirac equation in Bose-Einstein condensates: Foundation and symmetries. Physical D 2009, 238, 1413–1421. [Google Scholar] [CrossRef]
- Tran, T.X.; Longhi, S.; Biancalana, F. Optical analogue of relativistic Dirac solitons in binary waveguide arrays. Ann. Phys. 2014, 340, 179–187. [Google Scholar] [CrossRef]
- Arbunich, J.; Sparber, C. Rigorous derivation of nonlinear Dirac equations for wave propagation in honeycomb structures. J. Math. Phys. 2018, 59, 011509. [Google Scholar] [CrossRef]
- Borrelli, W. Stationary solutions for the 2D critical Dirac equation with Kerr nonlinearity. J. Differ. Equ. 2017, 263, 7941–7964. [Google Scholar] [CrossRef]
- Borrelli, W. Multiple solutions for a self-consistent Dirac equation in two dimensions. J. Math. Phys. 2018, 59, 041503. [Google Scholar] [CrossRef]
- Borrelli, W. Weakly localized states for nonlinear Dirac equations. Calc. Var. Part. Differ. Equ. 2018, 57, 155. [Google Scholar] [CrossRef]
- Fefferman, C.L.; Weinstein, M.I. Wave Packets in Honeycomb Structures and Two-Dimensional Dirac Equations. Commun. Math. Phys. 2014, 326, 251–286. [Google Scholar] [CrossRef]
- Sabirov, K.K.; Babajanov, D.B.; Matrasulov, D.U.; Kevrekidis, P.G. Dynamics of Dirac solitons in networks. J. Phys. A 2018, 51, 435203. [Google Scholar] [CrossRef]
- Cazenave, T. Semilinear Schrödinger Equations; Courant Lecture Notes in Mathematics, 10; American Mathematical Society: Providence, RI, USA, 2003; ISBN 0-8218-3399-5. [Google Scholar]
- Ambrosetti, A.; Malchiodi, A. Nonlinear Analysis and Semilinear Elliptic Problems; Cambridge Studies in Advanced Mathematics, 104; Cambridge University Press: Cambridge, UK, 2007; ISBN 978-0-521-86320-9. [Google Scholar]
- Berestycki, H.; Lions, P.-L. Nonlinear scalar field equations II. Existence of infinitely many solutions. Arch. Rational. Mech. Anal. 1983, 82, 347–375. [Google Scholar] [CrossRef]
- Rabinowitz, P.H. Minimax Methods in Critical Point Theory With Applications to Differential Equations; CBMS Regional Conference Series in Mathematics, 65; American Mathematical Society: Providence, RI, USA, 1986. [Google Scholar]
- Krasnosel’skii, M.A. Topological Methods in the Theory of Nonlinear Integral Equations; A Pergamon Press Book; The Macmillan Co.: New York, NY, USA, 1964. [Google Scholar]
- Bulla, W.; Trenkler, T. The free Dirac operator on compact and noncompact graphs. J. Math. Phys. 1990, 31, 1157–1163. [Google Scholar] [CrossRef]
- Post, O. Equilateral quantum graphs and boundary triples. In Analysis on Graphs and Its Applications; Proc. Sympos. Pure Math., 77; American Mathematical Society: Providence, RI, USA, 2008; pp. 469–490. [Google Scholar]
- Struwe, M. Variational Methods. Applications to Nonlinear Partial Differential Equations and Hamiltonian Systems, 4th ed.; Results in Mathematics and Related Areas, 3rd Series; A Series of Modern Surveys in Mathematics, 34; Springer: Berlin, Germany, 2008; ISBN 978-3-540-74012-4. [Google Scholar]
- Esteban, M.J.; Séré, E. Stationary states of the nonlinear Dirac equation: A variational approach. Commun. Math. Phys. 1995, 171, 323–350. [Google Scholar] [CrossRef]
- Esteban, M.J.; Séré, E. Nonrelativistic limit of the Dirac-Fock equations. Ann. Henri Poincaré 2001, 2, 941–961. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exponents | Ground | Bound | Connection NLS-NLD | |
|---|---|---|---|---|
| NLSE |
| (see box below) | (see box below) | |
|
|
| ||
|
|
| ||
| (see box above) |
| ||
| NLDE |
|
|
| |
| (see box above) |
| ||
| (see box above) |
|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borrelli, W.; Carlone, R.; Tentarelli, L. An Overview on the Standing Waves of Nonlinear Schrödinger and Dirac Equations on Metric Graphs with Localized Nonlinearity. Symmetry 2019, 11, 169. https://doi.org/10.3390/sym11020169
Borrelli W, Carlone R, Tentarelli L. An Overview on the Standing Waves of Nonlinear Schrödinger and Dirac Equations on Metric Graphs with Localized Nonlinearity. Symmetry. 2019; 11(2):169. https://doi.org/10.3390/sym11020169
Chicago/Turabian StyleBorrelli, William, Raffaele Carlone, and Lorenzo Tentarelli. 2019. "An Overview on the Standing Waves of Nonlinear Schrödinger and Dirac Equations on Metric Graphs with Localized Nonlinearity" Symmetry 11, no. 2: 169. https://doi.org/10.3390/sym11020169
APA StyleBorrelli, W., Carlone, R., & Tentarelli, L. (2019). An Overview on the Standing Waves of Nonlinear Schrödinger and Dirac Equations on Metric Graphs with Localized Nonlinearity. Symmetry, 11(2), 169. https://doi.org/10.3390/sym11020169