
Assessing Fine-Scale Urban Green and Blue Infrastructure Change in Manchester, UK: A Spatiotemporal Analysis Framework to Support Environmental Land Use Management

Abstract
1. Introduction
- i.
- Quantify and visualise spatial dynamics (loss and gain) in UGBI parcels at high resolution across an entire urban area.
- ii.
- Calculate UGBI loss/gain within each land use and extrapolate future UGBI change trends to understand risks to future urban environmental conditions.
- iii.
- Link vulnerability in UGBI resources (where UGBI has suffered losses) to land management practices and wider socio-economic trends.
2. Materials and Methods
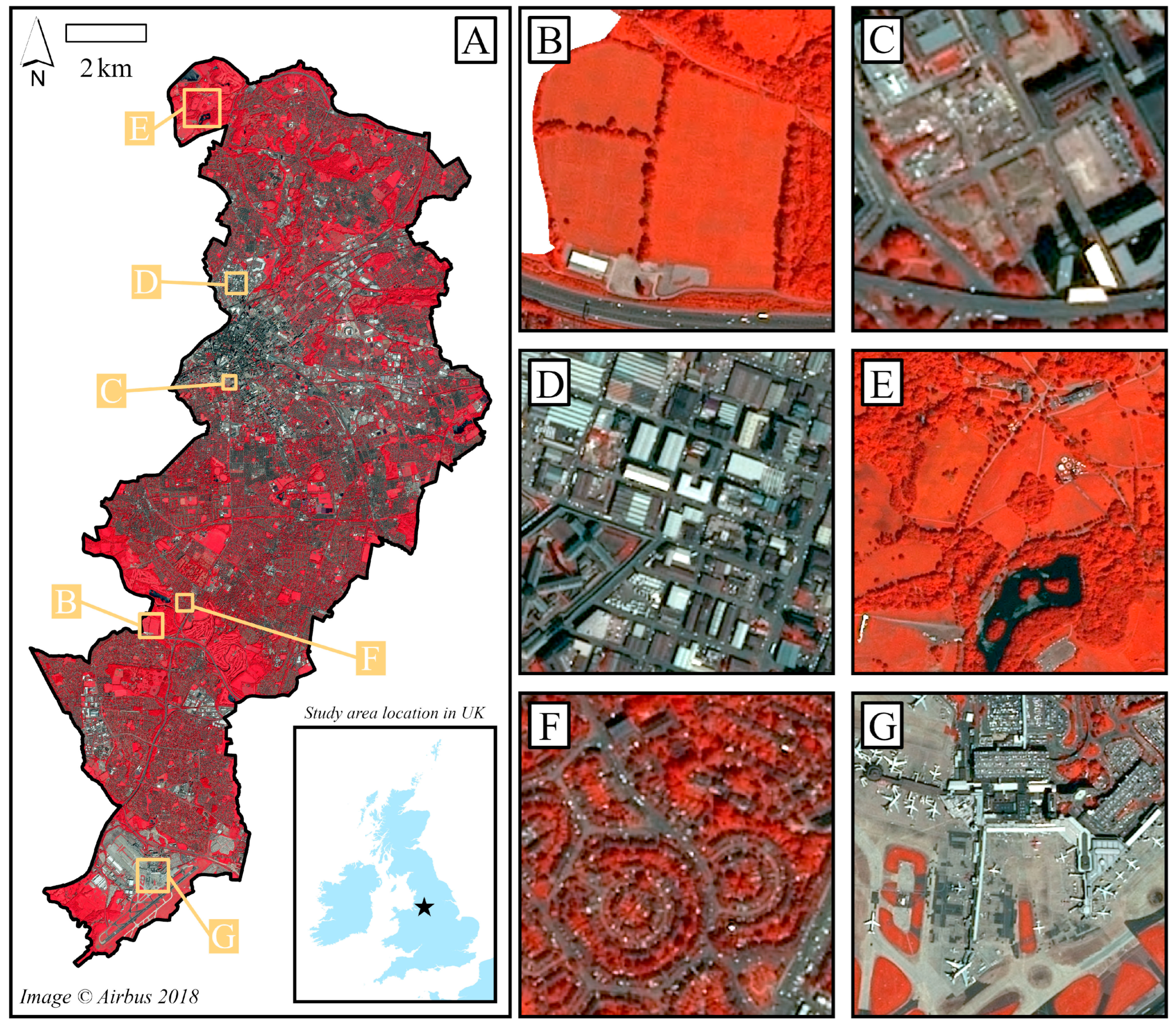
2.1. Study Area
2.2. Overview of Methods
- Object-based image classification, and subsequent validation, to produce a very high-resolution map of UGBI change patches.
- Semi-automated land use mapping to identify topographic parcels and sub-parcel features that have remained consistent in land use over the study period.
- Integration of stages (1) and (2) to identify UGBI change trends across the city, and for individual land use types, using error-adjustment methods. Visualisation of predicted future change in UGBI across the city.
2.3. Mapping UGBI Change Patches
2.4. Consistent Urban Land Use (ULU) Features
2.5. Mapping UGBI Change
3. Results
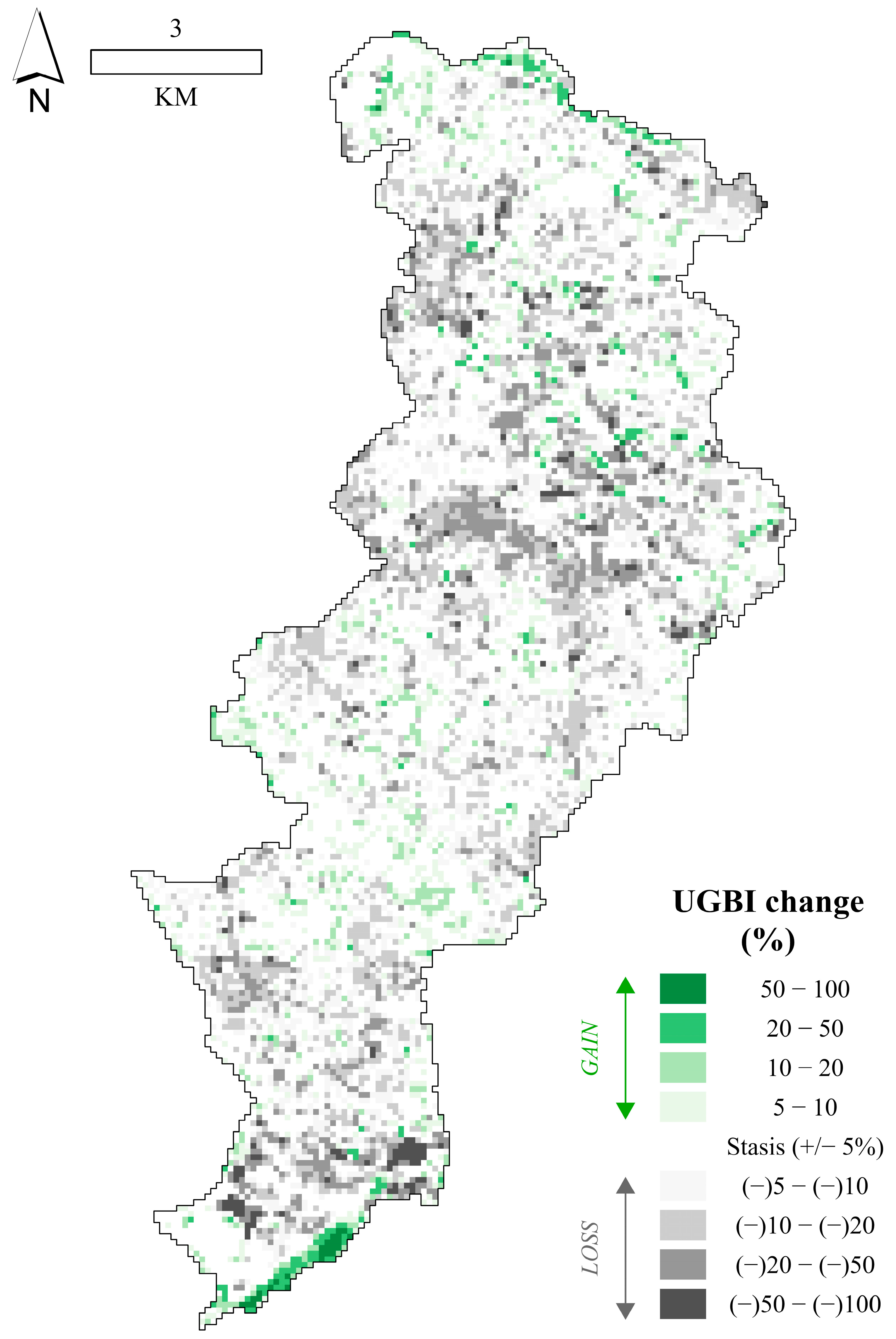
3.1. Overall UGBI Change
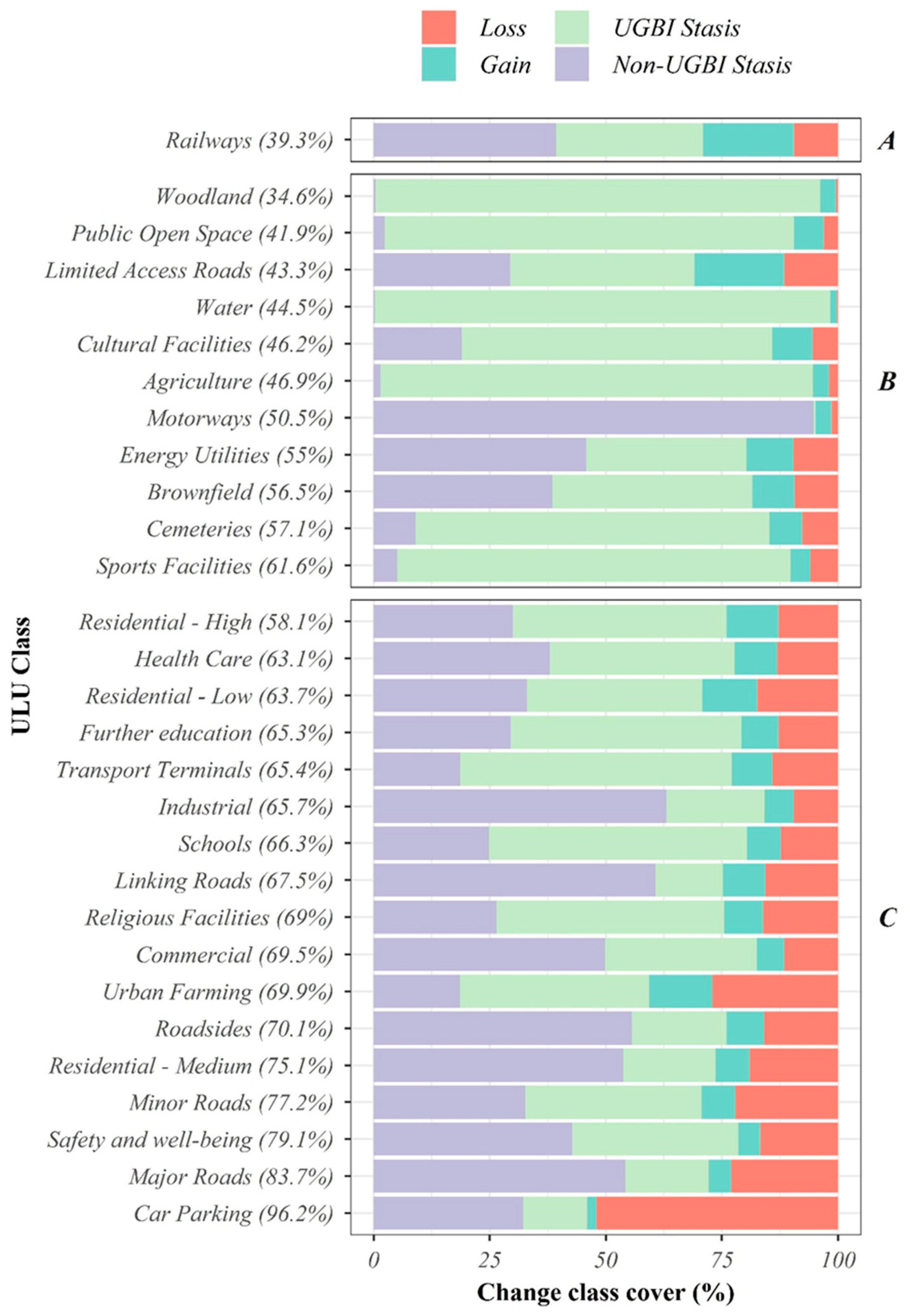
3.2. Urban Land Use
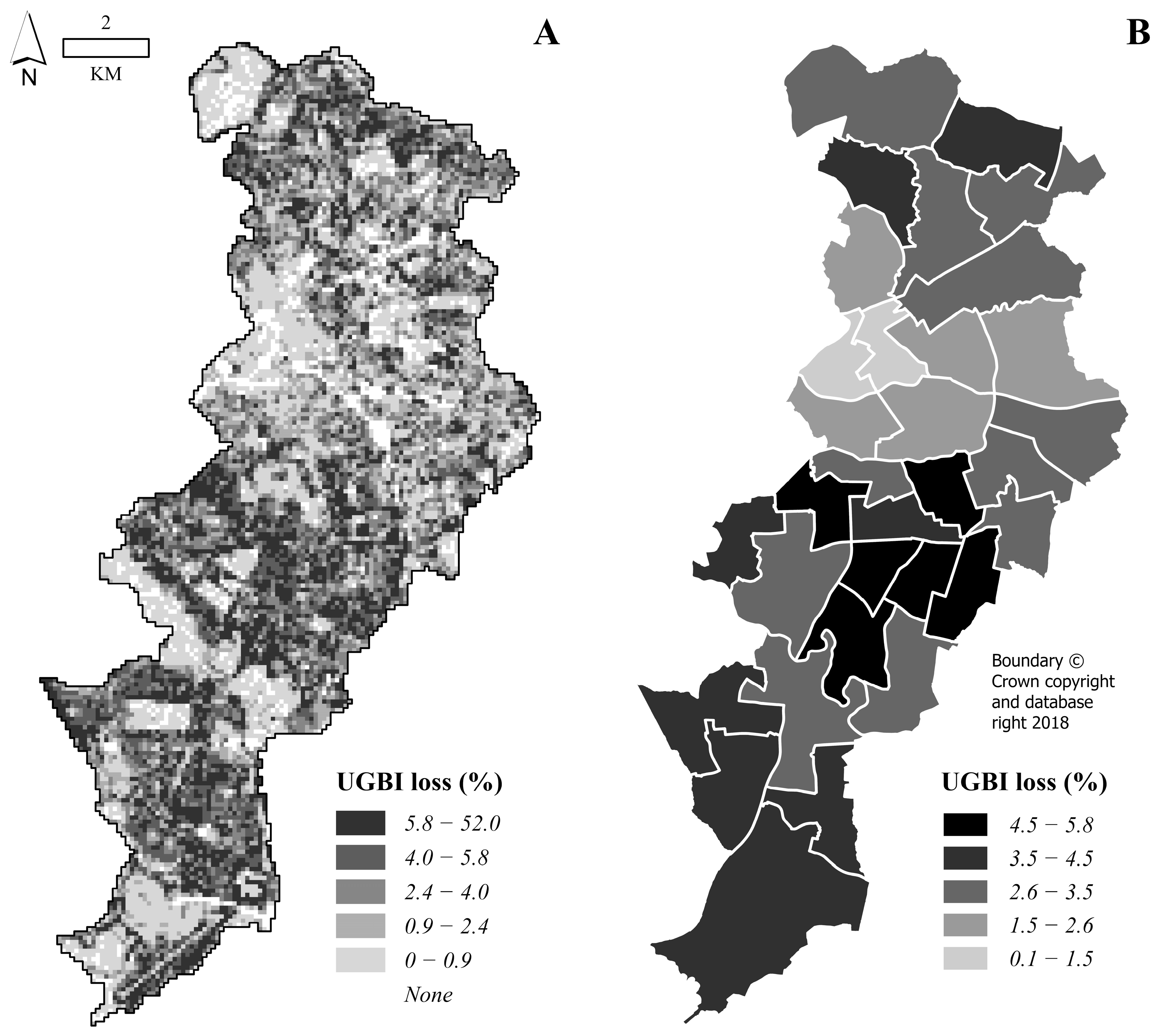
3.3. Extrapolation of Change Rates
4. Discussion
4.1. UGBI Change Trends
4.2. Limitations of the Framework and Future Research Directions
5. Conclusions
- 11% of existing UGBI in 2000 was lost by 2017.
- Dynamic change in UGBI, with 6.4% of the study area recording gains in UGBI compared to 11.9% of the study area recording losses in UGBI.
- All urban land use classes (n = 29) record areas of UGBI gain and loss; however, overall rates, considering the balance between gains and losses, are negative for the majority (58%) of classes.
- Projecting rates of change into the future indicates that nearly two-thirds (64%) of future UGBI loss could occur within existing Low- and Medium-density residential areas in the city.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Image Classification for 2017
Appendix A.1.1. Pre-Processing

| Sensor | Spectral Band | Bandwidth | Spatial Resolution |
|---|---|---|---|
| Spot-7 1 | Panchromatic | 0.45–0.745 μm | 1.5 m |
| Blue | 0.45–0.52 μm | 6 m | |
| Green | 0.53–0.59 μm | ||
| Red | 0.625–0.695 μm | ||
| Near Infrared (NIR) | 0.76–0.89 μm | ||
| Pleiades-1A 2 | Panchromatic | 0.47–0.83 μm | 0.5 m |
| Blue | 0.43–0.55 μm | 2 m | |
| Green | 0.5–0.62 μm | ||
| Red | 0.59–0.71 μm | ||
| Near Infrared (NIR) | 0.74–0.94 μm |
Appendix A.1.2. Classification Features
| Image Features | Description | Calculation Method |
|---|---|---|
| Original image layers | No processing required | |
| Normalized difference vegetation index—measure of pixel biomass photosynthetic production [86] | ||
| Normalized difference water index—measure of water content in water bodies [86] | ||
| Measure of brightness of visible radiation layers—useful for determining dark pixels [87] | ||
| Measure of pixel saturation or greyness [87] | = 3 for red, green, and blue layers; is pixel value for red, green or blue layer | |
| Chromatic values for red, green, and blue layers; reduces variance in pixel illumination in image and useful for other vegetation indices [88] | represents the relevant layer for chromatic value calculation | |
| Green red vegetation index—measure of pixel greenness [89] | ||
| Excess green vegetation index—measure of pixel greenness [88] | ||
| Excess green minus excess red index—alternative greenness index to the above [90] | ||
| 4 x principal component layers calculated from the red, green, blue, and NIR layers | Calculated using principal component function in ArcMap (version 10.5) | |
| NDVIRAT | Ratio NDVI feature between May and October images to create single index for seasonal NDVI variation | |
| NDWIRAT | Ratio NDWI feature between May and October images to create single index for seasonal NDWI variation |
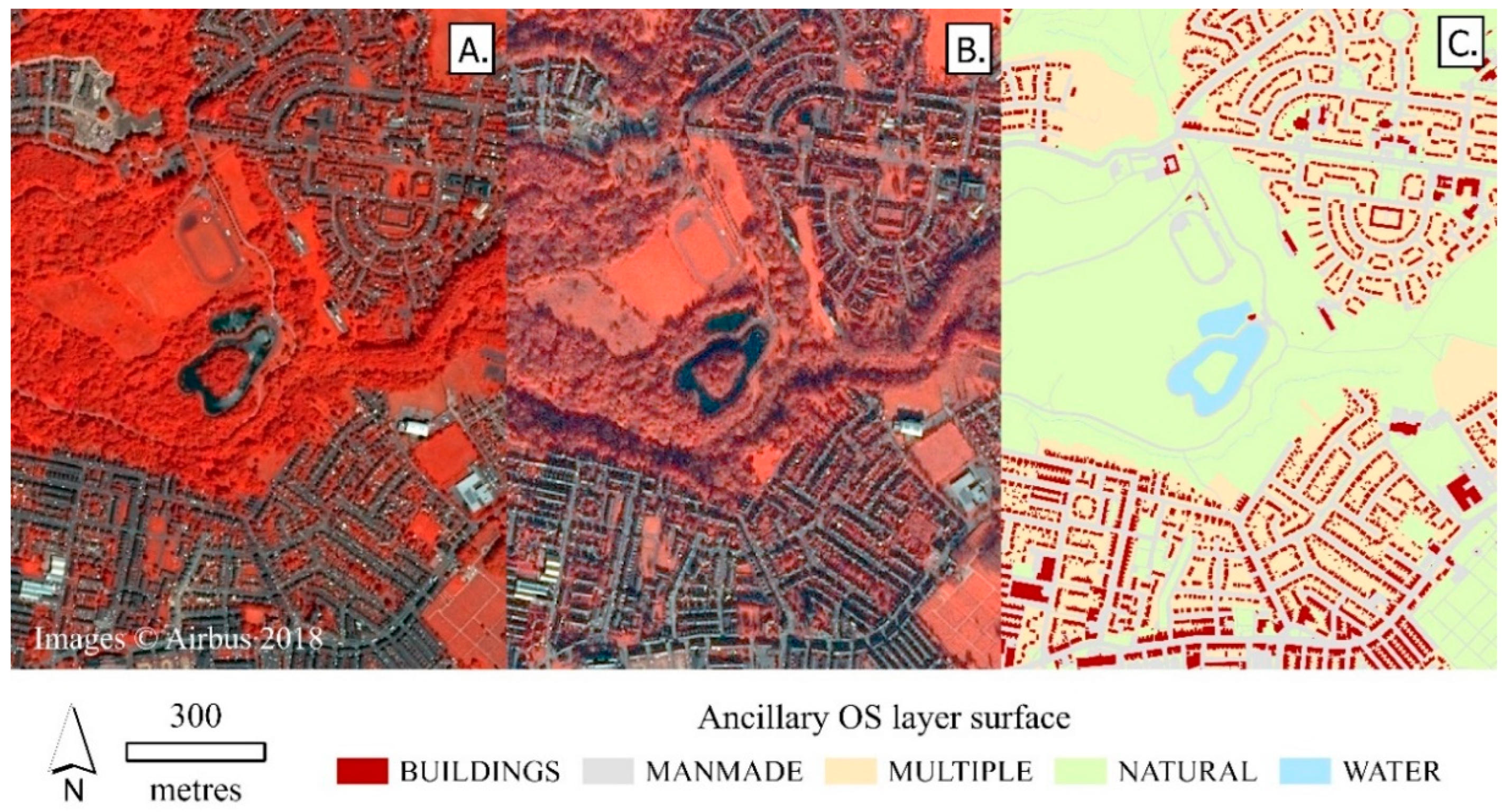
| Surface Class (in Order of Processing) | Description | Classification Ruleset (Terms in Italics Represent OSMT Attribute Field) |
|---|---|---|
| WATER | Exposed water, i.e., water channels, reservoirs, ponds | descriptiveGroup IS Inland Water, Natural Environment OR Inland Water, Structure OR Inland Water |
| BUILDINGS | Vertical standing built structures | Theme IS Buildings OR Buildings, Roads Tracks and Paths OR Buildings, Rail |
| NATURAL | Natural non-water surface such as bare earth, grass, and other vegetative surfaces | Make IS Natural OR descriptiveGroup IS Landform OR Landform, Road Or Track OR Landform, Rail OR Landform, Historic Interest OR Landform, Inland Water |
| MANMADE | Non-natural surfaces, e.g., asphalt, concrete | Make IS Manmade |
| MULTIPLE | Mixed NATURAL and MANMADE surface | All remaining records |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Appendix A.1.3. Image Samples for Classification
| Sub-Category | Description | Total No. of Samples | Proportion of Total Samples (%) | No. of Training Samples | No. of Validation Samples |
|---|---|---|---|---|---|
| Artificial * | Manmade non-vegetative ground surface, e.g., asphalt, concrete, paved materials | 280 | 13.8 | 197 | 83 |
| Bare earth * | Non-vegetative ground surface | 284 | 13.9 | 198 | 86 |
| Canopy ** | Bole and branch canopy (shrubs/trees) vegetation | 383 | 18.3 | 261 | 122 |
| Grass ** | Ground surface herbaceous vegetation | 287 | 13.7 | 196 | 91 |
| Water ** | Exposed water, i.e., water channels, reservoirs, ponds | 269 | 12.8 | 184 | 85 |
| Shaded non-vegetation * | Non-vegetation surfaces completely obscured by shadow | 285 | 13.7 | 197 | 88 |
| Shaded vegetation ** | Vegetation surfaces completely obscured by shadow | 289 | 13.8 | 197 | 92 |
| Total | 2077 | 100 | 1430 | 647 |
Appendix A.1.4. Classification Process
- Random forest classification (Initial sub-set; Table A5) to assign image pixels as either Non-Vegetation, Vegetation, Shaded non-vegetation, or Shaded vegetation.
- Segmentation of non-vegetation pixels into objects and random forest classification (Artificial sub-set; Table A5) to assign objects as either Artificial or Bare earth.
- Segmentation of vegetation pixels into objects and random forest classification (Canopy sub-set; Table A5) to assign objects as either Canopy or Grass.
- All non-Canopy pixels that overlap OS ancillary water areas, re-assign to the water class.
- All Artificial and shaded pixels that overlap OS ancillary building areas, re-assign to the Artificial class.
- Grass and Bare earth pixels within OS ancillary manmade and building areas, re-assign to the Artificial class.
- Manually check classified pixels against imagery for areas of misclassification and rectify.
- Group shadow pixels into objects representing the respective shadow class and assign to respective non-vegetation or vegetation classes, according to the longest shared border to respective class objects.
- Re-assign remaining shaded class pixels according to respective majority non-UGBI or UGBI candidate class within a 100 m circular buffer around the pixel object centroid.
- Assign all Grass, Canopy, and Water pixels to UGBI class and Artificial and Bare earth pixels to non-UGBI class.
- Assess accuracy using error matrix with validation samples (see Table A6).
| Sub-set | Input Classes | Output Classes | Method | Segmentation * and Classification Layers | RF Settings | |
|---|---|---|---|---|---|---|
| Mtry | Ntree | |||||
| Initial | Unclassified | Non-vegetation class, Vegetation class, Shaded vegetation, and Shaded non-vegetation | Pixel | Blue, Red, PCA1, GreenCHR, EXGEXR | 3 | 50 |
| Artificial | Non-vegetation | Artificial and Bare earth | Object | BlueCHR, NDWI, PCA3, RedCHR, NDVI, PCA4, SdRGB, ocNDVI, SDEV_BlueCHR, ocBlueCHR | 3 | 1000 |
| Canopy | Vegetation | Grass and Canopy (combines Deciduous and Evergreen) | Object | GreenCHR, SdRGB, BlueCHR, Red, EXGEXR, PCA3, MeanRGB, NDWI, NDVI, PCA1, PCA4, ocPCA2, SDEV_BlueCHR, Blue | 5 | 1000 |
| Non-GBI | GBI | User (%) | |
|---|---|---|---|
| Non-UGBI | 248 | 12 | 95.4 |
| UGBI | 9 | 378 | 97.7 |
| Producer (%) | 96.5 | 96.9 | |
| Overall accuracy (%) | 96.8 | ||
| Kappa | 0.93 | ||
Appendix A.2. Classification of Year 2000 Imagery
Appendix A.2.1. Pre-Processing
Appendix A.2.2. Classification Features
| Image Features | Description | Calculation Method |
|---|---|---|
| Default image layers | No further processing required | |
| Measure of brightness of visible radiation layers—useful for determining dark pixels [87] | ||
| Measure of pixel saturation or greyness [87] | where = 3 for red, green, and blue layers; is pixel value for red, green, or blue layer | |
| Chromatic values for red, green, and blue layers; reduces variance in pixel illumination in image and useful for other vegetation indices [88] | where represents the relevant layer for chromatic value calculation | |
| Green red vegetation index—measure of pixel greenness [89] | ||
| Excess green vegetation index—measure of pixel greenness [88] | ||
| Excess green vegetation index—measure of pixel redness [88] | ||
| Excess green minus excess red index—alternative greenness index to the above [90] |
| Ancillary Feature | Description | Method |
|---|---|---|
| BUILDINGS | Extents of building features within land-line data | Land-line polygons containing land-line points representing building features * |
| ROADS | Extents of road features within land-line data | Polygon created using a 2.5 m buffer around land-line polylines representing road centre lines |
| WATER | Extents of water features and channels within land-line data | Land-line polygons identified with maximum shared border to land-line polyline features representing water * |
Appendix A.2.3. Image Samples for Classification
| Class | Total No. of Samples | Proportion of Total Samples (%) | No. of Training Samples | No. of Validation Samples |
|---|---|---|---|---|
| Non-vegetation ◊ | 693 | 36.47 | 462 | 231 |
| Shaded non-vegetation *,◊ | 210 | 11.05 | 140 | 70 |
| Shaded vegetation *,ˠ | 240 | 12.63 | 160 | 80 |
| Vegetation ˠ | 702 | 36.95 | 468 | 234 |
| Water **,ˠ | 55 | 2.89 | 0 | 55 |
| Total | 1900 | 100 | 1230 | 670 |
Appendix A.2.4. Classification Process
| Candidate Class | Rules for Shadow classes |
|---|---|
| Non-vegetation | Relative border to Non-vegetation = 1 |
| Vegetation | Relative border to Vegetation = 1 |
| Merge all objects and intersect with WATER and BUILDINGS layer polygons | |
| Candidate class | Rules for Shadow class |
| Non-vegetation | Minimum overlap with BUILDINGS > 0 |
| Water | Minimum overlap with WATER > 0 |
| Non-vegetation | Relative border to Non-vegetation = 1 |
| Non-vegetation | Relative border to Water AND Non-vegetation = 1 |
| Vegetation | Relative border to Water AND Vegetation = 1 |
| Merge all objects and intersect with WATER layer polygons | |
| Candidate class | Rules for Non-vegetation class |
| Water | Minimum overlap with WATER > 0 |
| Merge all objects | |
| Candidate class | Rules for Vegetation class |
| Non-vegetation | Minimum overlap with ROAD ≥ 0.8 |
| Non-vegetation | Minimum overlap with BUILDINGS ≥ 0.8 |
| Re-classify non-shadow classes to either GBI or non-GBI; Segment shadow class into pixel objects | |
| Non-GBI | GBI | User (%) | |
|---|---|---|---|
| Non-UGBI | 293 | 8 | 97.3 |
| UGBI | 31 | 338 | 91.6 |
| Producer (%) | 90.4 | 97.6 | |
| Overall accuracy (%) | 94.2 | ||
| Kappa | 0.93 | ||
Appendix A.3. UGBI Change Layer (2000–2017)
| UGBI Loss | UGBI Gain | UGBI Stasis | Non-UGBI Stasis | Users (%) | |
|---|---|---|---|---|---|
| UGBI loss | 60 | 0 | 4 | 1 | 92.3 |
| UGBI gain | 0 | 35 | 8 | 2 | 77.8 |
| UGBI stasis | 4 | 3 | 209 | 1 | 96.3 |
| Non-UGBI stasis | 6 | 2 | 0 | 251 | 96.9 |
| Producers (%) | 85.7 | 87.5 | 94.6 | 98.4 | |
| Overall accuracy (%) | 94.7 | Kappa | 0.92 | ||
Appendix B
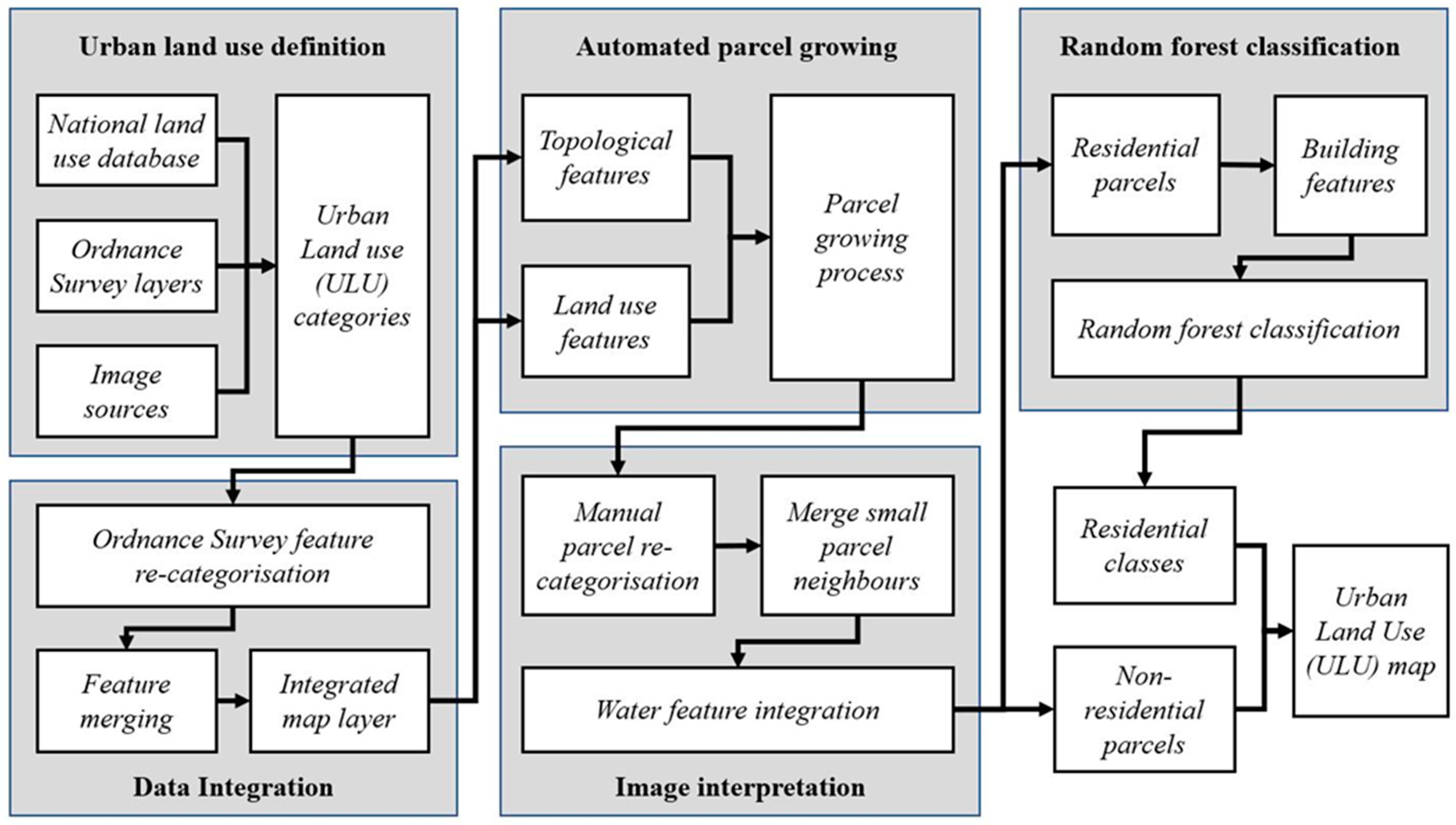
Appendix B.1. Method Overview
- ULU categories were defined using the UK NLUD [47] as a framework (see main article, Section 2.4).
- Integration of existing data in Ordnance Survey data layers (Table A13) to directly categorise urban land use (ULU) for as much of the study area as possible.
- Automated parcel growing after initial ULU categorisation to group remaining non-assigned topographic features (such as buildings, access paths, and general enclosures) into parcels that adequately represent a single land use [100].
- Assignment of ULU labels to non-assigned parcels through manual image interpretation in conjunction with the Spot-7 and Google Earth imagery.
- Random forest classification to classify initial ULU residential group areas into either Low-, Medium-, or High-density residential ULU classes.
- Validation of final ULU map dataset.
| Product * | Version | Description |
|---|---|---|
| MasterMap Sites Layer | October 2017 | Spatial extents of important locations such as airports, schools, hospitals, utility and infrastructure sites |
| MasterMap Greenspace Layer | July 2017 | Spatial extents of publicly accessible and non-accessible greenspace areas within urban areas |
| MasterMap Topography Layer | May 2017 | Detailed spatial data representing physical (e.g., surface extents, physical boundaries, buildings, paths) and non-physical (e.g., administrative and electoral boundaries, cartographic text, symbols) features |
| Open Map Local (Vector) | October 2017 | Open access street-level mapping vector data product containing additional extents of useful urban sites not defined within the above layers |
| MasterMap Highways Network | October 2017 | Route lines for highways (roads and paths) network for geo-spatial network analysis |
| Building Heights (Alpha) | October 2017 | Consisting of a number of different height attributes for each building in the MasterMap Topography Layer |
Appendix B.2. Urban Land Use (ULU) Definition
| NLUD 2006 | ULU 2017 | ||
|---|---|---|---|
| ORDER | GROUP | CLASS | GROUP |
| AGRICULTURE & FISHERIES | Agriculture | 5.1 Agriculture | Non-recreational Open Space |
| Fisheries | |||
| FORESTRY | Managed forest | 5.4 Woodland | |
| Un-managed forest | |||
| MINERALS | Mineral workings & quarries | Not identifiable | Not identifiable |
| RECREATION & LEISURE | Outdoor amenity & open spaces | 6.1 Public open space | Public Recreation |
| Amusement & show places | Not identifiable | Not identifiable | |
| Libraries, museums & galleries | 3.2 Cultural facilities | Community Services | |
| Sports Facilities & grounds | 6.2 Sports facilities | Public Recreation | |
| Holiday parks & camps | 7.1 Low-density residential | Residential | |
| Allotments & city farms | 6.3 Urban farming | Public Recreation | |
| TRANSPORT | Transport tracks & ways | 8.6 Motorways | Transport |
| 8.4 Major roads | |||
| 8.3 Linking roads | |||
| 8.5 Minor roads | |||
| 8.2 Limited access roads | |||
| 8.8 Roadsides | |||
| 8.7 Railways | |||
| Transport terminals & interchanges | 8.9 Transport terminals | ||
| Car parks | 8.1 Car parking | ||
| Other Vehicle storage | |||
| Goods & freight handling | 4.1 Industrial | Industrial | |
| Waterways | 5.3 Water | Non-recreational Open Space | |
| NLUD 2006 | ULU 2017 | ||
| ORDER | GROUP | CLASS | GROUP |
| UTILITIES & INFRASTRUCTURE | Energy production & distribution | 4.2 Energy utilities | Industrial |
| Water storage & treatment | 5.3 Water | Non-recreational Open Space | |
| Refuse disposal | 4.1 Industrial | Industrial | |
| Cemeteries & crematoria | 5.2 Cemeteries | Non-recreational Open Space | |
| Post & telecommunications | 2.1 Commercial | Commercial | |
| RESIDENTIAL | Dwellings | 7.1 Low-density residential | Residential |
| Dwellings | 7.2 Medium-density residential | ||
| Dwellings | 7.3 High-density residential | ||
| Hotels, boarding & guest houses | |||
| Residential institutions | |||
| COMMUNITY SERVICES | Medical & health care services | 3.3 Health care | Community Services |
| Places of worship | 3.5 Religious facilities | ||
| Education | 3.6 Schools | ||
| Education | 3.4 Higher education | ||
| Community services | 3.1 Safety and well-being | ||
| RETAIL | Shops | 2.1 Commercial | Commercial |
| Shops | |||
| Financial & professional services | |||
| Restaurants & cafes | |||
| Public houses, bars & nightclubs | |||
| INDUSTRY & BUSINESS | Manufacturing | 4.1 Industrial | Industrial |
| Offices | 2.1 Commercial | Commercial | |
| Storage | 4.1 Industrial | Industrial | |
| Wholesale distribution | |||
| VACANT & DERELICT | Vacant | 1.1 Brownfield | Brownfield |
| Derelict | |||
| DEFENCE | Defence | Safety and well-being | Community Services |
| UNUSED LAND | Unused land | 1.1 Brownfield | Brownfield |
Appendix B.3. Process Steps to Create the Urban Land Use (ULU) Layer
| Step | Description | |||
|---|---|---|---|---|
| 1 | Select and extract OS MasterMap Topography Layer (OSMT): Polyline features representing obstructing features to create Obstructing polylines data. Obstructing polylines represent above-ground features such as fences, walls, hedges etc. that prevent pedestrian access to enclosed areas. Obstructing polylines represent features that define distinct land parcel areas within the OS Topography dataset. | |||
| 2 | Intersect Obstructing polylines with study area boundary to create set of polygon areas (BASE OS) with unique ID reference and all with MERGE label pOSMT. | |||
| 3 | Re-classify OSMT: Polygons with MERGE labels where the following attribute conditions are met: | |||
| MERGE label * | THEME contains | THEME excludes | DESCRIPTION contains | |
| pBUILDINGS | Buildings | Rail OR Roads Tracks and Paths OR Water | n.a. | |
| pPATH | Roads Tracks And Paths | Rail OR Water | Path | |
| pROAD | Roads Tracks And Paths | Rail OR Water | Road Or Track | |
| pWATER | Water | Rail OR Roads Tracks and Paths | n.a. | |
| Railways | Rail | n.a. | n.a. | |
| Roadsides | Roads Tracks And Paths | Rail OR Water | Roadside | |
| * Labels beginning with a lower case p represent preliminary class polygons to be categorised into final ULU classes in subsequent steps. Other labels represent final ULU classes. Extract re-class label polygons only from the OSMT: Polygons data to create PRLM ULU. | ||||
| 4 | Erase BASE OS polygons using the extents of PRLM ULU, and then merge to form PRLM OS dataset. | |||
| 5 | Re-classify OS Open Map local (OPMP: Important building points) points with MERGE labels where the following conditions are met: | |||
| MERGE label | CLASSIFICATION contains | |||
| Community services | Fire station OR Police station | |||
| Cultural facilities | Art Gallery OR Library OR Museum OR Tourist information | |||
| Health care | Hospice OR Hospital OR Medical care accommodation | |||
| Higher education | Further education OR Higher or university education | |||
| Religious facilities | Place of worship | |||
| Schools | Non-state primary education OR Non-state secondary education OR Primary education OR Secondary education OR Special needs education | |||
| Sports facilities | Sports and leisure centre | |||
| Transport terminals | Airport OR Bus station OR Coach station | |||
| 6 | Re-classify PRLM OS buildings containing re-classified OPMP building points with appropriate MERGE label. | |||
| 7 | Re-classify Highways—All: MasterMap Highways Network (NTWK) polylines where the following conditions are met: | |||
| MERGE label | routeHierarchy attributes | |||
| Motorways | Motorway | |||
| Major roads | A road primary, A road | |||
| Linking roads | B road, B road primary | |||
| Minor roads | Minor road, Local road, Local access road | |||
| Limited access roads | Restricted local access road, Restricted secondary access road, Secondary access road | |||
| 8 | Re-classify PRLM OS pROADs polygons with MERGE label from contained NTWK polyline. | |||
| 9 | Re-classify OS MasterMap Sites Layer (SITES) polygons where the following conditions are met: | |||
| MERGE label | Site Layer attribute: Function | |||
| Energy utilities | Gas Distribution or Storage OR Electricity distribution | |||
| Health care | Hospice OR Hospital OR Medical care accommodation | |||
| Higher education | Further education OR Further education, Higher or university education OR Higher or university education | |||
| Railways | Railway station | |||
| Schools | Further education, Non-state primary education OR Further education, Non-state secondary education OR Further education, Secondary education OR Non-state primary education OR Non-state primary education, Non-state secondary education OR Primary education OR Primary education, secondary education OR Secondary education OR Special needs education OR Non-state secondary education | |||
| Transport terminals | Airport or Bus station or Coach station | |||
| 10 | Re-classify and retain OS MasterMap Greenspace (GRNS) layer polygons where the following conditions are met: | |||
| MERGE label | Greenspace Layer: Primary Function (priFunc) | |||
| Brownfield | Non-functioning | |||
| Cemeteries | Cemetery | |||
| Public open space | Public park Or Garden | |||
| Religious facilities | Religious grounds | |||
| Residential | Camping Or Caravan park OR Private gardens | |||
| Sports facilities | Bowling green OR Golf course OR Play space OR Playing field OR Tennis court OR Other sports facility OR Formal recreation | |||
| Urban farming | Allotments or community growing spaces | |||
| 11 | Erase GRNS polygons using SITES polygons and then erase PRLM OS using GRNS and SITES layers in turn. Merge GRNS, SITES, and PRLM OS polygons to form ULU MERGE dataset. | |||
| 12 | Re-classify ULU MERGE pBUILDINGS and pOSMT labels where polygons are surrounded by polygons with single ULU (excludes Roadsides) class label. Re-classify pPATH polygons that border pBUILDINGS and either any pOSMT, ULU Group Road, or Roadsides polygons as pBUILDINGS. | |||
| 13 | Re-classify pOSMT polygons into PRLM OS classes; enables iterative grouping of non-ULU class polygons into self-contained parcels based upon observations of topological relationships in the OS data. Re-classify as follows: | |||
| Topological rule | PRLM OS * | Class hierarchy | ||
| Polygon shares common boundary with pBUILDINGS polygon AND ULU Group Road polygon | OS_Access_Build | 1 | ||
| Polygon shares common boundary with pBUILDINGS polygon AND NOT ULU Group Road polygon | OS_Build | 2 | ||
| Polygon shares common boundary with ULU Group Road polygon and NOT pBUILDINGS polygon | OS_Access | 3 | ||
| Polygon shares no common boundary with ULU Group Road polygon OR pBUILDINGS polygon | OS_Island | 4 | ||
| * Topological class definition: OS_Access_Build: Polygon links pBUILDINGS that supports a particular land use to an access road, enabling land use to function self-sufficiently; OS_Build: Polygon is attached and thus supports a building area supporting a particular land use; OS_Access: Polygon acts as link between access road to larger land use parcel but is not directly associated with a building area; OS_Island: Polygon does not satisfy any of the above conditions. | ||||
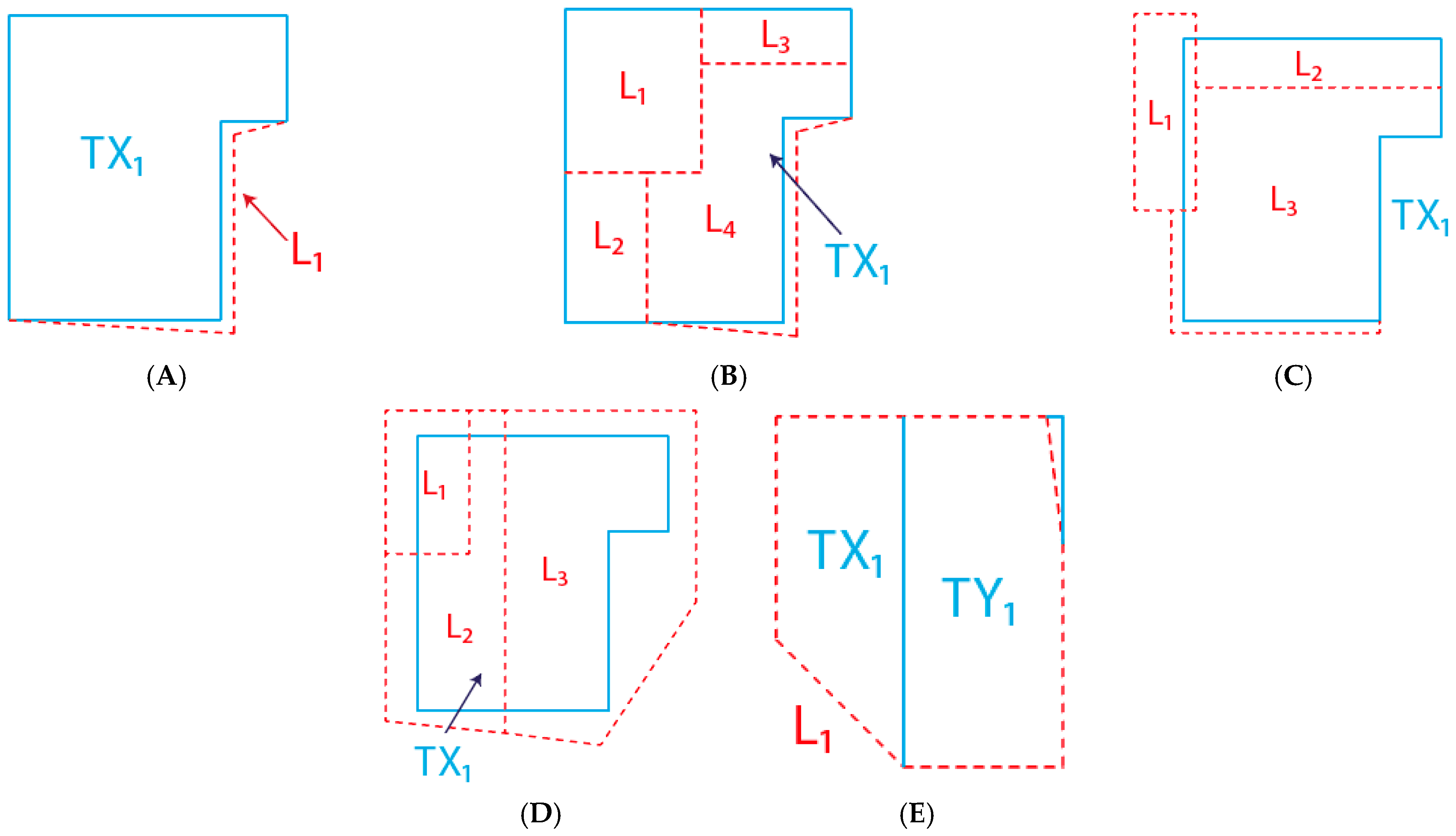
| 14 | Topologically class polygons into single parcel areas following the processes described below: | |||
| Process | Method | |||
| 1 | Re-assign unique IDs of OS_Build and OS_Access_Build polygons according to neighbouring pBUILDINGS polygon with largest area | |||
| 2 | Find pBUILDINGS objects with IDs different to IDs of neighbouring topological class polygons | |||
| 3 | Use neighbouring IDs to link areas together; assign new ID to all polygons with any of the neighbouring IDs; iterate this process until no further polygon IDs can be re-assigned; re-assign topological class labels to OS_Access_Build if any polygons with new ID is this class, else re-assign class labels as OS_Build | |||
| 4 | Assign IDs of OS_Build polygons to OS_Access polygons based upon majority shared border, and reclassify combined area as OS_Access_Build | |||
| 5 | Merge remaining OS_Build polygons to OS_Access_Build polygons based upon majority shared border | |||
| 6 | Re-classify remaining OS_Build polygons neighbouring Roadsides AND OS_Access_Build polygons as OS_Land_Parcels | |||
| 7 | Re-classify remaining OS_Build polygons as OS_Islands | |||
| 15 | Merge OS_Islands with neighbouring class polygons (excluding pWATER, pPATH, and Brownfield) based upon majority shared border; re-classify remaining OS as OS PARCELS if this condition is not satisfied; dissolve all polygons according to updated classification. | |||
| 16 | Manually inspect OS PARCELS polygons in conjunction with May 2017 and Google Earth street-view imagery to assign appropriate ULU class labels; if OS PARCELS do not represent homogenous ULU class parcel area then re-classify as error parcels. | |||
| 17 | Rectify error parcels by using polygons to select original contained OS MasterMap polygon areas; group error parcels into homogenous land parcel areas and assign appropriate class label. | |||
| 18 | Merge remaining non-ULU class polygons (excluding pWATER) into neighbouring ULU polygons according to majority border relationship. | |||
| 19 | Identify polygons below the minimum mapping unit of 45 m2 and merge with neighbouring class areas according to majority shared neighbouring border. The minimum mapping unit area (45 m2) was determined by a general observation that polygons of this size would contain 20 complete classification pixels and thus maintain the expected change detection accuracy of 85% when considering whole pixel numbers (85% of 20 is thus 17). | |||
| 20 | Manually select pWATER areas that are neither water channels, canals, rivers, nor reservoirs (shared water utilities) and merge into neighbouring class polygons based upon majority shared boundary. | |||
| 21 | Create parcel based building info features (see Table A16) for Residential polygons using Building Heights polygons by extracting building polygons with area ≥ 30 m2 (representing actual dwelling areas) contained inside Residential polygon areas. | |||
| 22 | Classify ULU Residential polygons as follows: | |||
| Process | Method | |||
| 1 | Select classification samples for Low-, Medium-, and High-density residential classes (using ancillary imagery and MasterMap polygons as a guide) and split into training and validation samples | |||
| 2 | Use the random forest algorithm (see Table A17) to re-classify residential polygons ensuring overall classification accuracy ≥85% | |||
| 3 | Manually re-classify (using ancillary imagery and OS MasterMap polygons as a guide) any residential polygons that do not contain Building Heights data | |||
| 23 | Create final ULU class layer by ensuring topological errors are corrected, with updated ID values, polygon area, and length data attached. | |||
| Feature | Method |
|---|---|
| MIN_HT | Minimum dwelling building height |
| MAX_HT | Maximum dwelling building height |
| AVE_HT | Average dwelling building height |
| RAN_HT | Difference between MIN_HT and MAX_HT |
| MIN_AR | Minimum dwelling building area |
| MAX_AR | Maximum dwelling building area |
| AVE_AR | Average dwelling building area |
| RAN_AR | Difference between MIN_AR and MAX_AR |
| MIN_VL | Minimum dwelling building volume |
| MAX_VL | Maximum dwelling building volume |
| AVE_VL | Average dwelling building volume |
| RAN_VL | Difference between MIN_VL and MAX_VL |
| LOG_RATIO_AREA | Log of [parcel polygon area/Total residential dwelling area] |
| LOG_RATIO_VOLUME | Log of [parcel polygon area/Total residential dwelling volume] |
| B_AVE_NB | Average number of dwellings per block |
| B_AVE_AR | Average area of block |
| B_MIN_AR | Minimum residential block area |
| B_MAX_AR | Maximum residential block area |
| B_RAN_AR | Difference between B_MIN_AR and B_MAX_AR |
| B_AVE_HT | Average residential block height |
| B_MIN_HT | Minimum residential block height |
| B_MAX_HT | Maximum residential block height |
| B_RAN_HT | Difference between B_MIN_HT and B_MAX_HT |
| B_AVE_VL | Average residential block volume |
| B_MIN_VL | Minimum residential block volume |
| B_MAX_VL | Maximum residential block volume |
| B_RAN_VL | Difference between B_MIN_VL and B_MAX_VL |
| Step | Description |
|---|---|
| 1 | An initial 300 residential polygons were chosen using random selection (within quantiles for polygon areas) with class labels manually assigned. Due to the limited number of Residential—High (n = 26) samples obtained through this process, additional samples (n = 54; total of 80) were obtained for this class. Sample numbers for Residential—Sub-urban (n = 134) and Residential—Urban (n = 140) remained relatively even. A reasonable number of polygons for training the data were randomly split (within quantiles for polygon areas), ensuring a 75/25% split for training and validation polygons, respectively. |
| 2 | The final random forest model was tuned with features (B_AVE_AR, AVE_VL, B_AVE_NB, AVE_AR, MAX_VL, and MAX_AR) selected using the VSURF() algorithm in addition to parameters: mtry = 1 and ntree = 1000. Overall accuracy on validation samples = 85.1% (kappa = 0.767). |
| 3 | Residential polygons lacking appropriate classification feature data (186 out of 5867) were manually re-classified. |
Appendix B.4. Validation of Urban Land Use Layer
| ULU Group | ULU Class | User Accuracy (%) | Producer Accuracy (%) | Class Confusion (Row-wise) Counts |
|---|---|---|---|---|
| Brownfield | Brownfield | 100 | 97.1 | |
| Commercial | Commercial | 93.9 | 93.9 | Public open space × 1|Residential—Low × 1 |
| Community Services | Religious facilities | 100 | 100 | |
| Cultural facilities | 100 | 100 | ||
| Health care | 100 | 97.1 | ||
| Safety and well-being | 100 | 97.1 | ||
| Further education | 100 | 100 | ||
| Schools | 100 | 100 | ||
| Industrial | Energy utilities | 90.9 | 100 | Railways × 2|Woodland × 1 |
| Industrial | 93.9 | 96.9 | Residential—Low × 2 | |
| Non-recreational Open Space | Agriculture | 93.9 | 100 | Health care × 1|Residential—Low × 1 |
| Cemeteries | 100 | 100 | ||
| Water | 100 | 100 | ||
| Woodland | 90.9 | 100 | Major roads × 1|Public open space × 1|Residential—Low × 1 | |
| Recreational Open Space | Public open space | 93.9 | 93.9 | Residential—Low × 1|Roadside × 1 |
| Sports facilities | 100 | 97.1 | ||
| Urban farming | 97.0 | 100 | Sports facilities × 1 | |
| Residential | Residential—Low | 84.4 | 71.1 | Residential—Medium × 5 |
| Residential—Medium | 100 | 80.5 | ||
| Residential—High | 78.8 | 100 | Residential—Low × 4|Residential—Medium × 3 | |
| Transport | Railways | 87.9 | 93.5 | Commercial × 2|Brownfield × 1|Residential—Low × 1 |
| Roadsides | 97.0 | 97.0 | Minor roads × 1 | |
| Limited access roads | 100 | 100 | ||
| Minor roads | 100 | 97.1 | ||
| Linking roads | 100 | 100 | ||
| Major roads | 100 | 97.1 | ||
| Motorways | 100 | 100 | ||
| Transport terminals | 100 | 100 | ||
| Car parking | 97.0 | 100 | Industrial × 1 |
Appendix C
Appendix C.1. Polygon Overlap Comparison Process
- (i)
- Sub-set LL00 polygons that intersect :
- (ii.)
- Select LL00 polygons if ratio of intersected area to LL00 polygon area is >C.T.
- (iii.)
- Calculate Overlap:
Appendix C.2. Polygon Overlap Comparison Algorithm
- # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
- # Overlap algorithm—function code with instructions (lines starting with ‘#’ are comments
- # and not functioning script)
- # Author: Fraser Baker; Date: 7th February 2020
- # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
- # Pre-processing—requires input data as follows:
- #
- # -> REFERENCE POLYGONS: THESE ARE POLYGONS WITH LAND-USE CLASS
- # LABELS; MUST CONTAIN UNIQUE POLYGON ID REFERENCE (REF.ID),
- # POLYGON AREA (AREA.REF) AND LAND-USE CLASS LABEL (CLASS)
- #
- # -> TEST POLYGONS: THESE ARE POLYGONS WITHOUT LAND-USE CLASS
- # LABELS; MUST CONTAIN UNIQUE POLYGON ID REFERENCE (TES.ID)
- # AND POLYGON AREA (AREA.TES)
- #
- # Intersect REFFERENCE and TEST POLYGONS to create new dataset
- # with the required fields below:
- #
- # REF.ID = ID OF INTERSECTED REFERENCE POLYGON
- # TES.ID = ID OF INTERSECTED TEST POLYGON
- # AREA.INT = AREA OF POLYGON INTERSECTION
- # AREA.REF = ORIGINAL AREA OF INTERSECTED REFERENCE POLYGON
- # AREA.TES = ORIGINAL AREA OF INTERSECTED TEST POLYGON
- # RATIO.TES = AREA.INT/AREA.TES
- # RATIO.REF = AREA.INT/AREA.REF
- # CLASS = LAND-USE CLASS ASSIGNED TO REFERENCE POLYGON
- #
- # data.frame (DF) required from this dataset only
- # ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
- # overlap() function defined below—requires following inputs from user:
- #
- # DF = data.frame of REFERENCE to TEST polygon intersection
- # ID = unique ID of REFERENCE polygon under investigation
- # c.t = conditional threshold to assess polygon overlap
- #
- # all other variables in function call should be assigned NULL
- #
- overlap <- function(DF,ID,c.t,rel.REF.2.TES = NULL,TES.sub.of.RES = NULL,
- a = NULL,a.TES.ov.REF = NULL,a.REF.ov.TES = NULL){
- #
- a <- DF[DF$REF.ID%in%ID,] #subset main dataframe according to ID of
- # REFERENCE polygon under investigation
- #
- if(length(a$TES.ID)>1){
- # If a has multiple records then REFERENCE polygon is subdivided by
- # multiple TEST polygons
- #
- a.REF.ov.TES <- a[a$RATIO.REF>c.t,] # subset all records where RATIO.TES > c.t
- #
- if(length(a.TES.ov.REF$TES.ID) > 0){ # assess if any records for TEST polygons remain
- rel.REF.2.TES <- ifelse((sum(a.TES.ov.REF$AREA.TES)/unique(a.TES.ov.REF$AREA.REF))>c.t,1,0)
- # If TRUE TEST polygons form part of group that sub-divides and overlaps a REFERENCE
- # polygon within threshold tolerance; CON = 1 in this case
- #
- TES.sub.of.REF <- unique(a.REF.ov.TES$TES.ID) # store ID’s of TEST polygons intersected
- # with the REFERENCE polygon
- }
- } else {
- # If a has single record then this this suggests REFERENCE may be matched to a single
- # TEST polygon or forms a group of REFERENCE polygons that sub-divides a single TEST
- # polygon
- a.TES.ov.REF <- DF[DF$TES.ID%in%a$TES.ID,] # subset all records from main dataframe by
- # TEST.ID in a
- #
- a.TES.ov.REF <- a.TES.ov.REF[a.REF.ov.TES$RATIO.REF > c.t,] # subset all records where
- # RATIO.REF > c.t.
- #
- if(length(a.TES.ov.REF$REF.ID) > 0){ #
- if((sum(a.TES.ov.REF$AREA.REF)/unique(a.TES.ov.REF$AREA.REF)) > c.t){
- # If TRUE REFERENCE polygons form part of group that sub-divides and
- # overlaps a TEST polygon within threshold tolerance
- if(length(unique(a.TES.ov.REF$CLASS))==1){ # multiple land-use classes are not acceptable
- #
- rel.REF.2.TES <- ifelse(length(a.TES.ov.REF$REF.ID)>1,2,1)
- # If TRUE TEST polygon is part of group that sub-divides
- # and overlaps REFERENCE polygon within threshold tolerance: CON = 2;
- # ELSE REFERENCE polygon overlaps single TEST polygon only: CON = 1
- }
- #
- TES.sub.of.REF <- unique(a.TES.ov.REF$TES.ID) # store relevant ID values for TEST polygons
- #
- }
- }
- }
- #
- return(list(REF.ID=ID,CLASS=unique(a$CLASS),RL.CON=rel.REF.2.TES,
- TES.ID=TES.sub.of.REF))
- # function returns list for input REFERENCE polygon with: REF.ID;
- # CLASS (Class of REFERENCE polygon);RL.CON (relative condition of overlap);
- # TES.ID (IDs of TEST polygons intersected to REFERENCE polygons)
- }
- #
- # Note: for large datasets that parrallel processing may be required to loop through all
- # unique REFERENCE polygon IDs
Appendix C.3. Definition of the C.T. Parameter in the Polygon Algorithm

Appendix D
Implementation of Error Adjustment Method to Estimate Net UGBI Change
| Loss | Gain | UGBI Stasis | Non-UGBI Stasis | Total | Class Area (m2) | Proportion of Total Area | |
|---|---|---|---|---|---|---|---|
| Loss | 115 | 0 | 8 | 2 | 125 | 767,993 | 0.13 |
| Gain | 0 | 97 | 22 | 6 | 125 | 432,567 | 0.08 |
| GBI stasis | 5 | 3 | 241 | 1 | 250 | 2,007,921 | 0.35 |
| Non-GBI stasis | 6 | 2 | 0 | 242 | 250 | 2,505,441 | 0.44 |
| Totals | 5,713,922 | 1 | |||||
| Loss | Gain | GBI Stasis | Non-GBI Stasis | |
|---|---|---|---|---|
| Loss | 0.124 | 0.000 | 0.009 | 0.002 |
| Gain | 0.000 | 0.059 | 0.013 | 0.004 |
| GBI stasis | 0.006 | 0.005 | 0.338 | 0.002 |
| Non-GBI stasis | 0.010 | 0.003 | 0.000 | 0.425 |
| Error-adjusted proportion of total area | 0.14 | 0.07 | 0.36 | 0.43 |
| Error-adjusted area (m2) | 801,607.0 | 382,778.3 | 2,059,179.6 | 2,470,357.1 |
Appendix E
Insignificant Differences Between Urban Land Use Classes Within Urban Land Use Groups
| ULU Class 1 | ULU Class 2 | p-Values | ULU Group |
|---|---|---|---|
| Agriculture | Water | 1 | Non-public open space |
| Agriculture | Woodland | 0.1 | Non-public open space |
| Further education | Health care | 1 | Community services |
| Further education | Religious facilities | 1 | Community services |
| Further education | Schools | 1 | Community services |
| Health care | Religious facilities | 1 | Community services |
| Health care | Schools | 1 | Community services |
| Limited access roads | Railways | 1 | Transport |
| Linking roads | Minor roads | 1 | Transport |
| Linking roads | Motorways | 1 | Transport |
| Linking roads | Roadsides | 1 | Transport |
| Major roads | Motorways | 1 | Transport |
| Minor roads | Motorways | 0.8 | Transport |
| Minor roads | Roadsides | 1 | Transport |
| Motorways | Roadsides | 1 | Transport |
References
- Carter, J.G.; Cavan, G.; Connelly, A.; Guy, S.; Handley, J.; Kazmierczak, A. Climate change and the city: Building capacity for urban adaptation. Prog. Plan. 2015, 95, 1–66. [Google Scholar] [CrossRef]
- Andreucci, M.B. Progressing green infrastructure in Europe. WIT Trans. Ecol. Environ. 2013, 179, 413–422. [Google Scholar]
- Evans, D.L.; Falagán, N.; Hardman, C.A.; Kourmpetli, S.; Liu, L.; Mead, B.R.; Davies, J.A.C. Ecosystem service delivery by urban agriculture and green infrastructure–a systematic review. Ecosyst. Serv. 2022, 54, 101405. [Google Scholar] [CrossRef]
- Farina, G.; Le Coent, P.; Hérivaux, C. Do urban environmental inequalities influence demand for nature based solutions? Ecol. Econ. 2024, 224, 108298. [Google Scholar] [CrossRef]
- Chen, B.; Nie, Z.; Chen, Z.; Xu, B. Quantitative estimation of 21st-century urban greenspace changes in Chinese populous cities. Sci. Total Environ. 2017, 609, 956–965. [Google Scholar] [CrossRef] [PubMed]
- Dallimer, M.; Tang, Z.; Bibby, P.R.; Brindley, P.; Gaston, K.J.; Davies, Z.G. Temporal changes in greenspace in a highly urbanized region. Biol. Lett. 2011, 7, 763–766. [Google Scholar] [CrossRef]
- Haaland, C.; van Den Bosch, C.K. Challenges and strategies for urban green-space planning in cities undergoing densification: A review. Urban For. Urban Green. 2015, 14, 760–771. [Google Scholar] [CrossRef]
- Richards, D.R.; Passy, P.; Oh, R.R. Impacts of population density and wealth on the quantity and structure of urban green space in tropical Southeast Asia. Landsc. Urban Plan. 2017, 157, 553–560. [Google Scholar] [CrossRef]
- Rodríguez, J.P.; Beard, T.D., Jr.; Bennett, E.M.; Cumming, G.S.; Cork, S.J.; Agard, J.; Dobson, A.P.; Peterson, G.D. Trade-offs across space, time, and ecosystem services. Ecol. Soc. 2006, 11, 28. [Google Scholar] [CrossRef]
- De Groot, R.S.; Alkemade, R.; Braat, L.; Hein, L.; Willemen, L. Challenges in integrating the concept of ecosystem services and values in landscape planning, management and decision making. Ecol. Complex. 2010, 7, 260–272. [Google Scholar] [CrossRef]
- Mell, I.; Clement, S. Progressing green infrastructure planning: Understanding its scalar, temporal, geo-spatial and disciplinary evolution. Impact Assess. Proj. Apprais. 2020, 38, 449–463. [Google Scholar] [CrossRef]
- Fisher, P.F.; Comber, A.J.; Wadsworth, R. Land use and land cover: Contradiction or complement. In Re-Presenting GIS; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2005; pp. 85–98. [Google Scholar]
- Barker, K. Barker Review of Land Use Planning: Final Report, Recommendations; The Stationery Office: Norwich, UK, 2006. [Google Scholar]
- Burkhard, B.; Kroll, F.; Nedkov, S.; Müller, F. Mapping ecosystem service supply, demand and budgets. Ecol. Indic. 2012, 21, 17–29. [Google Scholar] [CrossRef]
- Hasan, S.; Shi, W.; Zhu, X. Impact of land use land cover changes on ecosystem service value–A case study of Guangdong, Hong Kong, and Macao in South China. PLoS ONE 2020, 15, e0231259. [Google Scholar] [CrossRef] [PubMed]
- Sutton, P.C.; Anderson, S.J. Holistic valuation of urban ecosystem services in New York City’s Central Park. Ecosyst. Serv. 2016, 19, 87–91. [Google Scholar] [CrossRef]
- Preston, P.D.; Dunk, R.M.; Smith, G.R.; Cavan, G. Not all brownfields are equal: A typological assessment reveals hidden green space in the city. Landsc. Urban Plan. 2023, 229, 104590. [Google Scholar] [CrossRef]
- Warhurst, J.R.; Parks, K.E.; McCulloch, L.; Hudson, M.D. Front gardens to car parks: Changes in garden permeability and effects on flood regulation. Sci. Total Environ. 2014, 485, 329–339. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, C. Land parcel identification. In Agro-Geoinformatics: Theory and Practice; Springer: Cham, Switzerland, 2021; pp. 163–174. [Google Scholar]
- Cavan, G.; Baker, F.; Tzoulas, K.; Smith, C.L. Manchester: The role of urban domestic gardens in climate adaptation and resilience. In Urban Climate Science for Planning Healthy Cities; Springer: Cham, Switzerland, 2021; pp. 99–118. [Google Scholar]
- Pauleit, S.; Ennos, R.; Golding, Y. Modeling the environmental impacts of urban land use and land cover change—A study in Merseyside, UK. Landsc. Urban Plan. 2005, 71, 295–310. [Google Scholar] [CrossRef]
- Wellmann, T.; Schug, F.; Haase, D.; Pflugmacher, D.; van der Linden, S. Green growth? On the relation between population density, land use and vegetation cover fractions in a city using a 30-years Landsat time series. Landsc. Urban Plan. 2020, 202, 103857. [Google Scholar] [CrossRef]
- Dobbs, C.; Hernández-Moreno, Á.; Reyes-Paecke, S.; Miranda, M.D. Exploring temporal dynamics of urban ecosystem services in Latin America: The case of Bogota (Colombia) and Santiago (Chile). Ecol. Indic. 2018, 85, 1068–1080. [Google Scholar] [CrossRef]
- Cortinovis, C.; Geneletti, D. Ecosystem services in urban plans: What is there, and what is still needed for better decisions. Land Use Policy 2018, 70, 298–312. [Google Scholar] [CrossRef]
- Lam, S.T.; Conway, T.M. Ecosystem services in urban land use planning policies: A case study of Ontario municipalities. Land Use Policy 2018, 77, 641–651. [Google Scholar] [CrossRef]
- Reba, M.; Seto, K.C. A systematic review and assessment of algorithms to detect, characterize, and monitor urban land change. Remote Sens. Environ. 2020, 242, 111739. [Google Scholar] [CrossRef]
- Morin, E.; Herrault, P.A.; Guinard, Y.; Grandjean, F.; Bech, N. The promising combination of a remote sensing approach and landscape connectivity modelling at a fine scale in urban planning. Ecol. Indic. 2022, 139, 108930. [Google Scholar] [CrossRef]
- Almeida, C.R.D.; Teodoro, A.C.; Gonçalves, A. Study of the urban heat island (UHI) using remote sensing data/techniques: A systematic review. Environments 2021, 8, 105. [Google Scholar] [CrossRef]
- Zhu, Q.; Guo, X.; Li, Z.; Li, D. A review of multi-class change detection for satellite remote sensing imagery. Geo-Spat. Inf. Sci. 2024, 27, 1–15. [Google Scholar] [CrossRef]
- Domingo, D.; Palka, G.; Hersperger, A.M. Effect of zoning plans on urban land-use change: A multi-scenario simulation for supporting sustainable urban growth. Sustain. Cities Soc. 2021, 69, 102833. [Google Scholar] [CrossRef]
- Kudas, D.; Wnęk, A.; Hudecová, Ľ.; Fencik, R. Spatial Diversity Changes in Land Use and Land Cover Mix in Central European Capitals and Their Commuting Zones from 2006 to 2018. Sustainability 2024, 16, 2224. [Google Scholar] [CrossRef]
- Huang, H.; Chen, Y.; Clinton, N.; Wang, J.; Wang, X.; Liu, C.; Gong, P.; Yang, J.; Bai, Y.; Zheng, Y.; et al. Mapping major landcover dynamics in Beijing using all Landsat images in Google Earth Engine. Remote Sens. Environ. 2017, 202, 166–176. [Google Scholar] [CrossRef]
- Liu, S.; Marinelli, D.; Bruzzone, L.; Bovolo, F. A review of change detection in multitemporal hyperspectral images: Current techniques, applications, and challenges. IEEE Geosci. Remote Sens. Mag. 2019, 7, 140–158. [Google Scholar] [CrossRef]
- ONS (Office for National Statistics). How the Population Changed in Manchester: Census 2021. 28 June 2022. Available online: https://www.ons.gov.uk/visualisations/censuspopulationchange/E08000003/ (accessed on 23 March 2025).
- Manchester City Council. Manchester Green and Blue Infrastructure Strategy: Implementation Plan Refresh 2021–25. 2022. Available online: https://www.manchester.gov.uk/downloads/download/7456/2022_green_and_blue_infrastructure_refresh (accessed on 23 March 2025).
- Airbus. Spot 7 imagery [Data Download]. 2018. Adapted with Permission from © Airbus DS (2018). Licenced from ESA [European Space Agency]. 2018. Available online: http://open.esa.int/ (accessed on 12 March 2018).
- McDonald, R.I. Conservation for Cities: How to Plan & Build Natural Infrastructure; Island Press: Washington, DC, USA, 2015. [Google Scholar]
- Da Silva, J.M.C.; Wheeler, E. Ecosystems as infrastructure. Perspect. Ecol. Conserv. 2017, 15, 32–35. [Google Scholar] [CrossRef]
- Getmapping. Aerial Data—High Resolution Imagery [Data Download]. Adapted with permission from © Getmapping (2019). 2019. Available online: https://www.getmapping.co.uk/aerial-content/ (accessed on 29 May 2019).
- Persson, M.; Lindberg, E.; Reese, H. Tree species classification with multi-temporal Sentinel-2 data. Remote Sens. 2018, 10, 1794. [Google Scholar] [CrossRef]
- Peiman, R. Pre-classification and post-classification change-detection techniques to monitor land cover and land-use change using multi-temporal Landsat imagery: A case study on Pisa Province in Italy. Int. J. Remote Sens. 2011, 32, 4365–4381. [Google Scholar] [CrossRef]
- Jensen, J.R. Digital Image Processing: A Remote Sensing Perspective; Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Fuller, R.M.; Smith, G.M.; Devereux, B.J. The characterisation and measurement of land cover change through remote sensing: Problems in operational applications? Int. J. Appl. Earth Obs. Geoinf. 2003, 4, 243–253. [Google Scholar] [CrossRef]
- OS [Ordnance Survey]. OS MasterMap Topography Layer [Data Download]. 2017. Adapted with Permission from © Ordnance Survey (2020). Licenced from Edina Digimap AC0000851941. 2020. Available online: https://digimap.edina.ac.uk/ (accessed on 18 January 2020).
- Serra, P.; Pons, X.; Sauri, D. Post-classification change detection with data from different sensors: Some accuracy considerations. Int. J. Remote Sens. 2003, 24, 3311–3340. [Google Scholar] [CrossRef]
- Copernicus Land Monitoring Service. Urban Atlas. 2020. Available online: https://land.copernicus.eu/local/urban-atlas (accessed on 22 June 2020).
- Harrison, A.R. National Land Use Database: Land Use and Land Cover Classification; LandInform Ltd: Bristol, UK, 2006. [Google Scholar]
- OS [Ordnance Survey]. Land-Line [Data Download]. 2000. Adapted with Permission from © Ordnance Survey (2020). Licenced from Edina Digimap AC0000851941. 2020. Available online: https://digimap.edina.ac.uk/ (accessed on 18 January 2020).
- Aspinall, R.J.; Hill, M. Land cover change: A method for assessing the reliability of land cover changes measured from remotely-sensed data. In Proceedings of the IGARSS’97. 1997 IEEE International Geoscience and Remote Sensing Symposium Proceedings. Remote Sensing-A Scientific Vision for Sustainable Development, Singapore, 3–8 August 1997; Volume 1, pp. 269–271. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2022; Available online: https://www.r-project.org/ (accessed on 12 May 2025).
- Baker, F.; Smith, G.R.; Marsden, S.J.; Cavan, G. Mapping regulating ecosystem service deprivation in urban areas: A transferable high-spatial resolution uncertainty aware approach. Ecol. Indic. 2021, 121, 107058. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making better use of accuracy data in land change studies: Estimating accuracy and area and quantifying uncertainty using stratified estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Swinney, P.; Thomas, E. A Century of Change in Manchester. 2015. Available online: https://www.centreforcities.org/reader/a-century-of-cities/3-are-cities-bound-by-these-pathways/1-a-century-of-change-in-manchester/ (accessed on 2 May 2020).
- Smith, A. The development of “sports-city” zones and their potential value as tourism resources for urban areas. Eur. Plan. Stud. 2010, 18, 385–410. [Google Scholar] [CrossRef]
- Urban Splash. New Islington, Manchester. 2020. Available online: https://www.urbansplash.co.uk/regeneration/projects/new-islington (accessed on 15 May 2020).
- Kirby, D. Revealed: The trees on our streets are being felled at a rate of 58 a day. I-News, 31 March 2017. Available online: https://inews.co.uk/news/environment/revealed-suburban-trees-felled-rate-58-day-527251 (accessed on 2 February 2020).
- Salmond, J.A.; Tadaki, M.; Vardoulakis, S.; Arbuthnott, K.; Coutts, A.; Demuzere, M.; Dirks, K.N.; Heaviside, C.; Lim, S.; Macintyre, H.; et al. Health and climate related ecosystem services provided by street trees in the urban environment. Environ. Health 2016, 15, 95–111. [Google Scholar] [CrossRef]
- Perry, T.; Nawaz, R. An investigation into the extent and impacts of hard surfacing of domestic gardens in an area of Leeds, United Kingdom. Landsc. Urban Plan. 2008, 86, 1–13. [Google Scholar] [CrossRef]
- Verbeeck, K.; Van Orshoven, J.; Hermy, M. Measuring extent, location and change of imperviousness in urban domestic gardens in collective housing projects. Landsc. Urban Plan. 2011, 100, 57–66. [Google Scholar] [CrossRef]
- Whitford, V.; Ennos, A.R.; Handley, J.F. “City form and natural process”—Indicators for the ecological performance of urban areas and their application to Merseyside, UK. Landsc. Urban Plan. 2001, 57, 91–103. [Google Scholar] [CrossRef]
- Bibby, P.; Henneberry, J.; Halleux, J.M. Under the radar? ‘Soft’ residential densification in England, 2001–2011. Environ. Plan. B Urban Anal. City Sci. 2020, 47, 102–118. [Google Scholar] [CrossRef]
- Sayce, S.; Walford, N.; Garside, P. Residential development on gardens in England: Their role in providing sustainable housing supply. Land Use Policy 2012, 29, 771–780. [Google Scholar] [CrossRef]
- Osborne, L.P.; Cushing, D.F.; Washington, T.L. Where have all the backyards gone? The decline of usable residential greenspace in Brisbane, Australia. Aust. Plan. 2021, 57, 100–113. [Google Scholar] [CrossRef]
- Sainsbury, L.B.; Slater, D. Changes in paved space, green infrastructure and tree canopy cover in front gardens: A case study of two contrasting housing estates in Liverpool, England. Arboric. J. 2023, 45, 152–172. [Google Scholar] [CrossRef]
- Simpson, T.J.; Francis, R.A. Artificial lawns exhibit increased runoff and decreased water retention compared to living lawns following controlled rainfall experiments. Urban For. Urban Green. 2021, 63, 127232. [Google Scholar] [CrossRef]
- Dewaelheyns, V.; Kerselaers, E.; Rogge, E. A toolbox for garden governance. Land Use Policy 2016, 51, 191–205. [Google Scholar] [CrossRef]
- Goddard, M.A.; Dougill, A.J.; Benton, T.G. Scaling up from gardens: Biodiversity conservation in urban environments. Trends Ecol. Evol. 2010, 25, 90–98. [Google Scholar] [CrossRef]
- Kabisch, N. Ecosystem service implementation and governance challenges in urban green space planning—The case of Berlin, Germany. Land Use Policy 2015, 42, 557–567. [Google Scholar] [CrossRef]
- Whitten, M. Blame it on austerity? Examining the impetus behind London’s changing green space governance. People Place Policy 2019, 12, 204–224. [Google Scholar] [CrossRef]
- De Bell, S.; White, M.; Griffiths, A.; Darlow, A.; Taylor, T.; Wheeler, B.; Lovell, R. Spending time in the garden is positively associated with health and wellbeing: Results from a national survey in England. Landsc. Urban Plan. 2020, 200, 103836. [Google Scholar] [CrossRef]
- Amegah, A.K.; Yeboah, K.; Owusu, V.; Afriyie, L.; Kyere-Gyeabour, E.; Appiah, D.C.; Osei-Kufuor, P.; Annim, S.K.; Agyei-Mensah, S.; Mudu, P. Socio-demographic and neighbourhood factors influencing urban green space use and development at home: A population-based survey in Accra, Ghana. PLoS ONE 2023, 18, e0286332. [Google Scholar] [CrossRef]
- Haase, D.; Gaeva, D. Allotments for all? Social–environmental values of urban gardens for gardeners and the public in cities: The example of Berlin, Germany. People Nat. 2023, 5, 1207–1219. [Google Scholar] [CrossRef]
- Groundwork. Ignition: Nature Based Solutions for Greater Manchester. 2020. Available online: https://www.groundwork.org.uk/greatermanchester/gm-about/our-impact-gm/ (accessed on 14 May 2020).
- City of Trees. About City of Trees. 2025. Available online: https://www.cityoftrees.org.uk/about (accessed on 23 March 2025).
- Wang, J.; Bretz, M.; Dewan, M.A.A.; Delavar, M.A. Machine learning in modelling land-use and land cover-change (LULCC): Current status, challenges and prospects. Sci. Total Environ. 2022, 822, 153559. [Google Scholar] [CrossRef]
- Chaturvedi, V.; de Vries, W.T. Machine learning algorithms for urban land use planning: A review. Urban Sci. 2021, 5, 68. [Google Scholar] [CrossRef]
- GMCA (Greater Manchester Combined Authority). Greater Manchester Five-Year Environment Plan 2025–2030. 2024. Available online: https://www.greatermanchester-ca.gov.uk/media/alnl0fsy/gmca_5-year-plan_final_digital_v3-ua.pdf (accessed on 30 April 2025).
- DEFRA (Department for Environment, Food & Rural Affairs). Understanding Biodiversity Net Gain. 21 February 2023. Available online: https://www.gov.uk/guidance/understanding-biodiversity-net-gain (accessed on 30 April 2025).
- Boyd, E.H.; Leigh, G.; Sutton, J. The London Climate Resilience Review; Mayor of London Office: London, UK, 2024.
- Cameron, R. “Do we need to see gardens in a new light?” Recommendations for policy and practice to improve the ecosystem services derived from domestic gardens. Urban For. Urban Green. 2023, 80, 127820. [Google Scholar] [CrossRef]
- Gu, Z.; Zeng, M. The use of artificial intelligence and satellite remote sensing in land cover change detection: Review and perspectives. Sustainability 2024, 16, 274. [Google Scholar] [CrossRef]
- Hijmans, R.J. raster: Geographic Data Analysis and Modeling. R Package Version 3.3-13. 2020. Available online: https://CRAN.R-project.org/package=raster (accessed on 18 January 2020).
- Airbus. Pléiades User Guide & SPOT 6/7 User Guide. 2020. Available online: https://www.intelligence-airbusds.com/docs/9326-resource-centre#section-3672 (accessed on 9 August 2020).
- Aguilar, M.A.; Saldaña, M.M.; Aguilar, F.J. GeoEye-1 and WorldView-2 pan-sharpened imagery for object-based classification in urban environments. Int. J. Remote Sens. 2013, 34, 2583–2606. [Google Scholar] [CrossRef]
- Topan, H.; Kutoglu, H.S. Georeferencing accuracy assessment of high-resolution satellite images using figure condition method. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1256–1261. [Google Scholar] [CrossRef]
- Chuvieco, E. Fundamentals of Satellite Remote Sensing: An Environmental Approach; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Baker, F.; Smith, C.L.; Cavan, G. A combined approach to classifying land surface cover of urban domestic gardens using citizen science data and high resolution image analysis. Remote Sens. 2018, 10, 537. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Motohka, T.; Nasahara, K.N.; Oguma, H.; Tsuchida, S. Applicability of green-red vegetation index for remote sensing of vegetation phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. An SVM ensemble approach combining spectral, structural, and semantic features for the classification of high-resolution remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2012, 51, 257–272. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Baton Rouge, LA, USA, 2008. [Google Scholar]
- Uçar, M.K.; Nour, M.; Sindi, H.; Polat, K. The effect of training and testing process on machine learning in biomedical datasets. Math. Probl. Eng. 2020, 2020, 2836236. [Google Scholar] [CrossRef]
- Jin, H.; Mountrakis, G. Integration of urban growth modelling products with image-based urban change analysis. Int. J. Remote Sens. 2013, 34, 5468–5486. [Google Scholar] [CrossRef]
- Jin, H.; Stehman, S.V.; Mountrakis, G. Assessing the impact of training sample selection on accuracy of an urban classification: A case study in Denver, Colorado. Int. J. Remote Sens. 2014, 35, 2067–2081. [Google Scholar] [CrossRef]
- Warner, T.A.; Foody, G.M.; Nellis, M.D. The SAGE Handbook of Remote Sensing; SAGE Publications Inc: Thousand Oaks, CA, USA, 2009. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Genuer, R.; Poggi, J.M.; Tuleau-Malot, C. VSURF: An R Package for Variable Selection Using Random Forests. 2018. Available online: https://journal.r-project.org/archive/2015-2/genuer-poggi-tuleaumalot.pdf (accessed on 18 January 2020).
- Townshend, J.R.; Justice, C.O.; Gurney, C.; McManus, J. The impact of misregistration on change detection. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1054–1060. [Google Scholar] [CrossRef]
- Aguilar, M.A.; Agüera, F.; Aguilar, F.J.; Carvajal, F. Geometric accuracy assessment of the orthorectification process from very high resolution satellite imagery for Common Agricultural Policy purposes. Int. J. Remote Sens. 2008, 29, 7181–7197. [Google Scholar] [CrossRef]
- Bauer, T.; Steinnocher, K. Per-parcel land use classification in urban areas applying a rule-based technique. GeoBIT/GIS 2001, 6, 24–27. [Google Scholar]
- Viera, A.J.; Garrett, J.M. Understanding interobserver agreement: The kappa statistic. Fam. Med. 2005, 37, 360–363. [Google Scholar] [PubMed]






| ULU Group/Class | Description | % of Study Area |
|---|---|---|
| 1. Brownfield | Land without current purpose | 1.72 |
| 1.1 Brownfield | Brownfield areas, developmental land, and construction sites | 1.72 |
| 2. Commercial | Areas primarily providing commercial and retail services | 4.75 |
| 2.1 Commercial | Retail and professional services | 4.75 |
| 3. Community Services | Government and public community welfare services | 6.62 |
| 3.1 Safety and well-being | Public safety (e.g., police, fire, social support) | 0.34 |
| 3.2 Cultural facilities | Services supporting cultural recreation | 0.17 |
| 3.3 Health care | Health care services | 1.00 |
| 3.4 Higher education | Non-compulsory adult education services | 1.14 |
| 3.5 Religious facilities | Religious worship in any denomination | 0.53 |
| 3.6 Schools | Compulsory non-adult education services | 3.44 |
| 4. Industrial | Manufacturing, engineering, construction, and energy distribution services | 4.84 |
| 4.1 Industrial | Manufacturing, warehousing, and distribution sites | 4.51 |
| 4.2 Energy utilities | Generation and distribution of energy supplies | 0.33 |
| 5. Non-recreational Open Space | Predominantly open-space not supporting recreation | 7.72 |
| 5.1 Agriculture | Commercial farming | 3.55 |
| 5.2 Cemeteries | Processing and storage of human remains | 0.99 |
| 5.3 Water | Natural and purpose built water bodies and channels | 1.22 |
| 5.4 Woodland | Continuous tree cover separate to other land uses | 1.96 |
| 6. Public Recreation | Outdoor and indoor facilities supporting physical/social recreation | 17.92 |
| 6.1 Public open space | General outdoor amenities and open spaces | 11.10 |
| 6.2 Sports facilities | Land and facilities designated for sporting activities | 6.31 |
| 6.3 Urban farming | Non-commercial urban farming | 0.51 |
| 7. Residential | Primarily residential housing of varying dwelling density | 33.30 |
| 7.1 Low-density residential | Majority of dwellings are semi-detached and detached housing | 22.45 |
| 7.2 Medium-density residential | Majority of dwellings are terraced housing | 7.61 |
| 7.3 High-density residential | Majority of dwellings are former buildings converted into flats or purpose-built multi-dwelling apartment housing | 3.24 |
| 8. Transport | Infrastructure supporting the transport of people and goods | 23.13 |
| 8.1 Car parking | Car parking areas not associated with other land uses | 0.55 |
| 8.2 Limited access roads | Private roads connecting addresses to higher functioning roads | 0.48 |
| 8.3 Linking roads | B roads connecting significant destinations and feeding A roads | 0.35 |
| 8.4 Major roads | A roads and dual carriageways | 1.50 |
| 8.5 Minor roads | Roads connecting addresses to higher functioning roads | 7.11 |
| 8.6 Motorways | Motorway roads—as defined in the OS highways dataset | 0.69 |
| 8.7 Railways | Land and infrastructure supporting rail and tram travel | 1.94 |
| 8.8 Roadsides | Access routes between areas for non-vehicular travel | 6.56 |
| 8.9 Transport terminals | Non-rail mass transit travel, e.g., bus and tram stations, airports | 3.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baker, F.; Smith, G.; Marsden, S.; Cavan, G. Assessing Fine-Scale Urban Green and Blue Infrastructure Change in Manchester, UK: A Spatiotemporal Analysis Framework to Support Environmental Land Use Management. Land 2025, 14, 1077. https://doi.org/10.3390/land14051077
Baker F, Smith G, Marsden S, Cavan G. Assessing Fine-Scale Urban Green and Blue Infrastructure Change in Manchester, UK: A Spatiotemporal Analysis Framework to Support Environmental Land Use Management. Land. 2025; 14(5):1077. https://doi.org/10.3390/land14051077
Chicago/Turabian StyleBaker, Fraser, Graham Smith, Stuart Marsden, and Gina Cavan. 2025. "Assessing Fine-Scale Urban Green and Blue Infrastructure Change in Manchester, UK: A Spatiotemporal Analysis Framework to Support Environmental Land Use Management" Land 14, no. 5: 1077. https://doi.org/10.3390/land14051077
APA StyleBaker, F., Smith, G., Marsden, S., & Cavan, G. (2025). Assessing Fine-Scale Urban Green and Blue Infrastructure Change in Manchester, UK: A Spatiotemporal Analysis Framework to Support Environmental Land Use Management. Land, 14(5), 1077. https://doi.org/10.3390/land14051077