Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy


 ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
2. Study Areas and Dataset Description
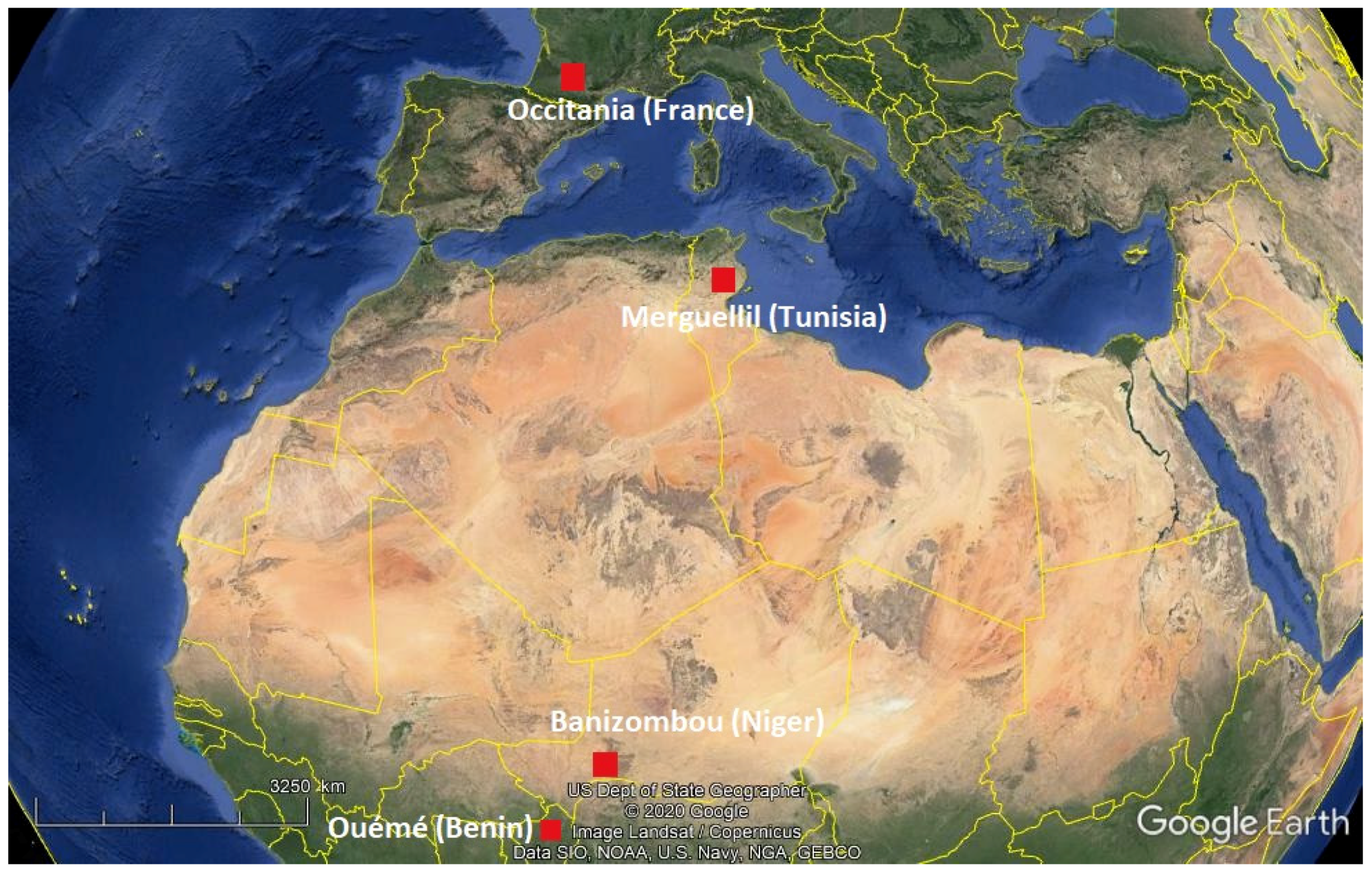
2.1. Study Areas
2.1.1. The Occitania Region (South of France)
2.1.2. Merguellil Site
2.1.3. Niger
2.1.4. Benin
2.2. Satellite Dataset
2.2.1. Sentinel-1
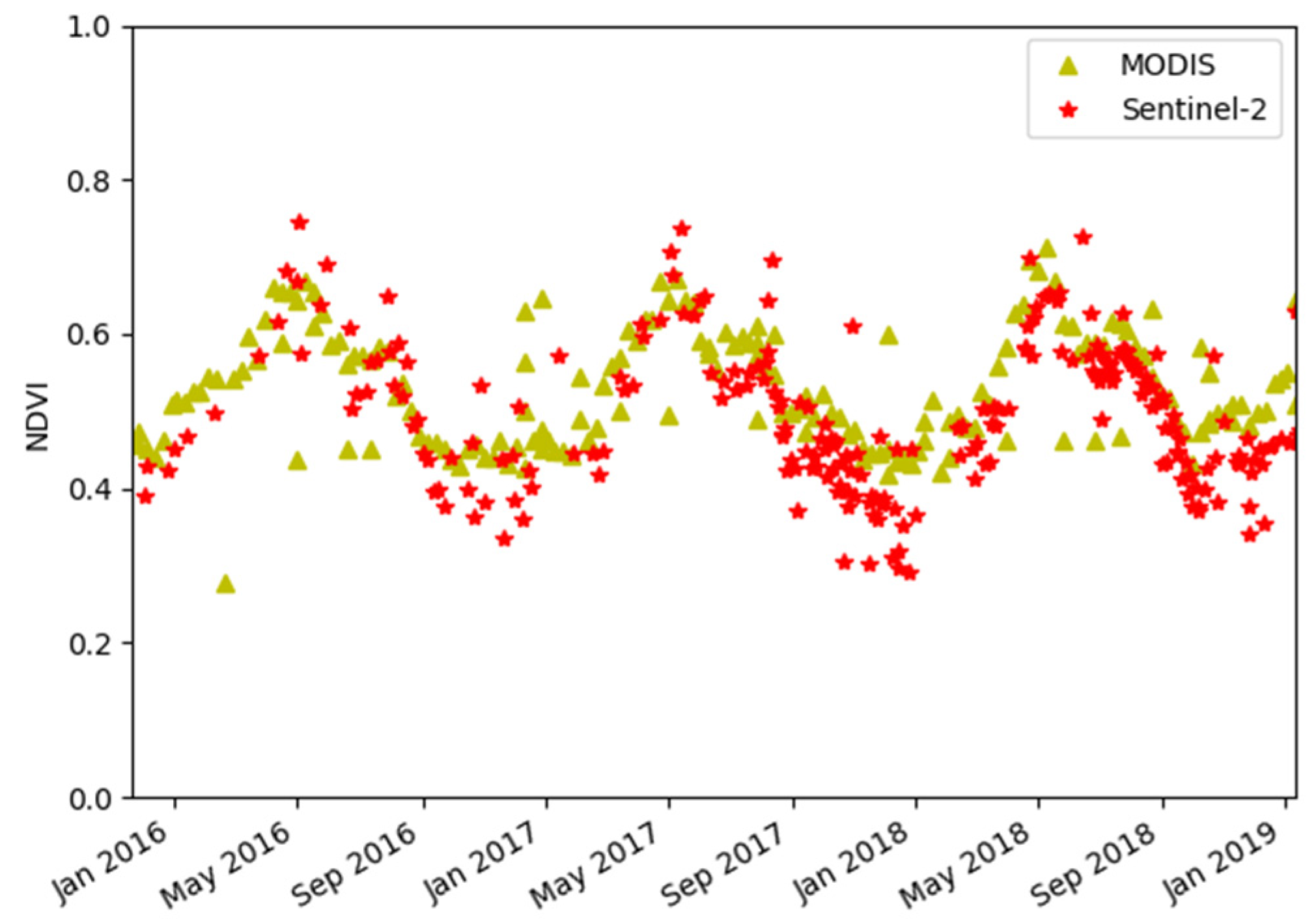
2.2.2. Sentinel-2
2.2.3. MODIS
2.2.4. ASCAT
3. Methodology
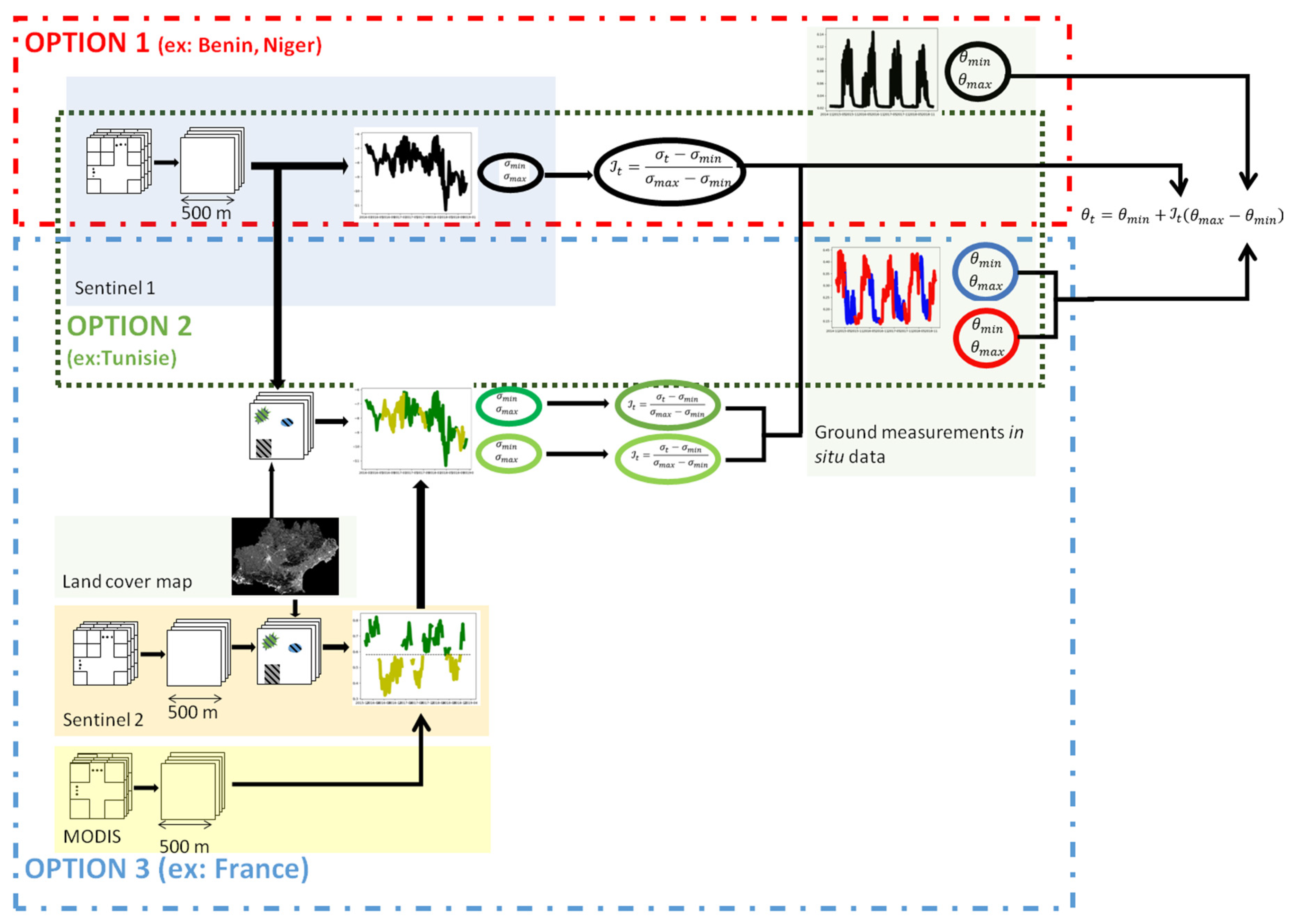
3.1. General Methodology
- is the moisture index at time ;
- is the radar signal in dB at time for a given 500 m × 500 m pixel;
- and are, respectively, the minimum and maximum radar signals in dB, for any given pixel.
- is the surface soil moisture content at time (m3 m−3);
- and represent the minimum and maximum values of in situ surface soil moisture at a depth of 5 cm at a given site (m3 m−3), defined by the 90% confidence interval of a Gaussian distribution [60]. By defining and as the mean and standard deviation of the ground truth data over the 3-year period used for this analysis, and can be computed as follows: and , where 1.65 represents the 95% quantile of the standard normal distribution. It was preferred to use these quantities rather than strict minimum and maximum values, in order to eliminate outliers. At the proposed spatial resolution, we consider the temporal influence of roughness on the radar signals to be constant.
- Radar signals are practically insensitive to surface soil moisture in the case of land cover such as forests and urban areas. For this reason, the radar signal data should be filtered and corrected, in order to consider only those areas that are suitable for surface soil moisture estimations.
- As radar signals are highly sensitive to the dynamics of the vegetation, a radar backscattering value should not be interpreted in the same way for different vegetation densities. For this reason, a more realistic analysis could be achieved with the change detection approach, using two different vegetation classes: one with a scattered vegetation cover and the other with a dense vegetation cover.
- The moisture cycle and the evaporative potential are not the same during the cold and hot seasons. This property is particularly visible in the moisture variations observed in the first centimeters of soil. In order to adjust the surface soil moisture estimations to seasonal conditions, the conversion of the moisture index to volumetric moisture could be adapted for each of these two seasons.
3.2. Radar Signal Correction
- Forest areas: Sentinel-1 C band data over these areas is only slightly sensitive to the soil water content, due to the strong attenuation of radar signals by the vegetation cover. For this reason, failure to remove forest-covered areas could generate inaccuracies in the estimation of surface soil moisture.
- Water bodies: as these have a very weak radar signature, due to the specular reflections produced by their air–water interface, an offset of −20 dB is applied to the radar signals [53].
- Urban areas: these have radar signatures which vary only slightly throughout the year, and remain only weakly sensitive to soil water content, due to the relatively low percentage of bare soil in urban areas. For these reasons, it was considered inappropriate to include these areas when estimating the dynamics of surface soil moisture content.
- is the average value of the radar signal over a 500 m × 500 m pixel, corresponding to mainly agricultural areas;
- is the number of Sentinel-1 pixels, which are not classed as urban, forest or water in the 500 m × 500 m pixel;
- is the radar signal over the pixels classed as agricultural areas.
3.3. Use of the Vegetation Density Information
- , , , and are the percentages of Sentinel-2 pixels tagged as forest (and, respectively, urban, water, or other). As an example, for the 31TCJ tile, 13.3% of this area is covered by forests, 9.2% is urban, and only 0.9% is covered by water. Thus, the remaining approximately ¾ of the 31TCJ tile is tagged as agricultural or natural landscapes;
- is the average value computed over 4 MODIS pixels (since 1 MODIS pixel is around 250 m × 250 m);
- is the NDVI corresponding to agricultural fields;
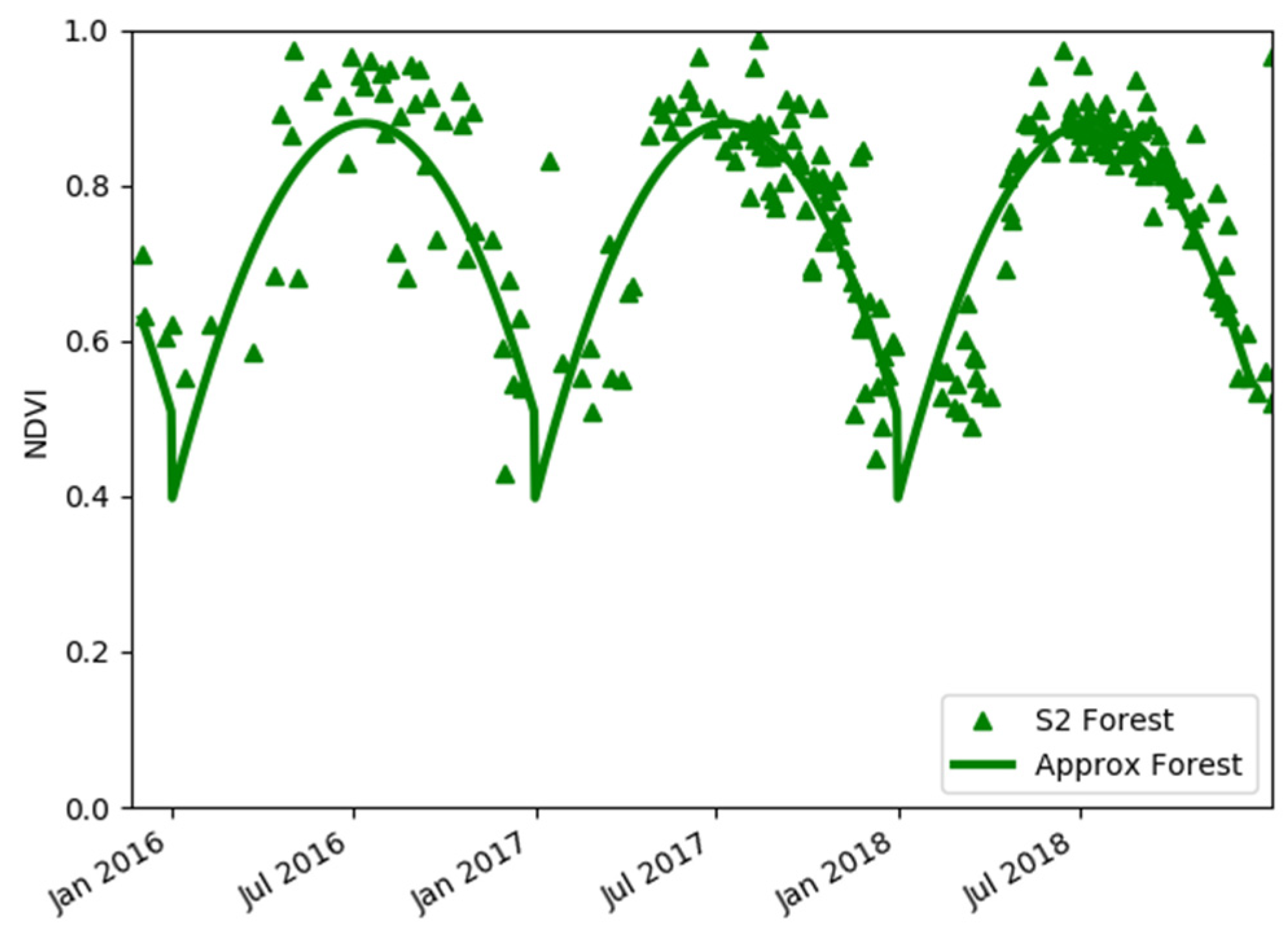
- is the NDVI associated with pixels tagged as forest. Using Sentinel-2 NDVI products, it is possible to observe (Figure 4) that NDVIforest generally follows an annual cycle. It is straightforward to determine the annual cycle, which can be approximated by a 2nd-order polynomial;
- is the NDVI computed from Sentinel-2 data and associated with pixels tagged as urban. The urban NDVI remained almost stable throughout the measurement period;
- is the NDVI associated with pixels tagged as bodies of water. As a wide variety of water-covered surfaces can be encountered, it is known that the associated NDVI can range between a negative number and 0.1. However, as the proportion of the 31TCJ tile’s surface area covered by water is less than 1%, it was not possible to establish reliable statistics for .
3.4. Use of Seasonal Surface Soil Moisture Information
4. Results
4.1. Contributions of the Three Proposed Processes
4.2. Validation of Surface Soil Moisture Estimations Determined with the SMES Algorithm
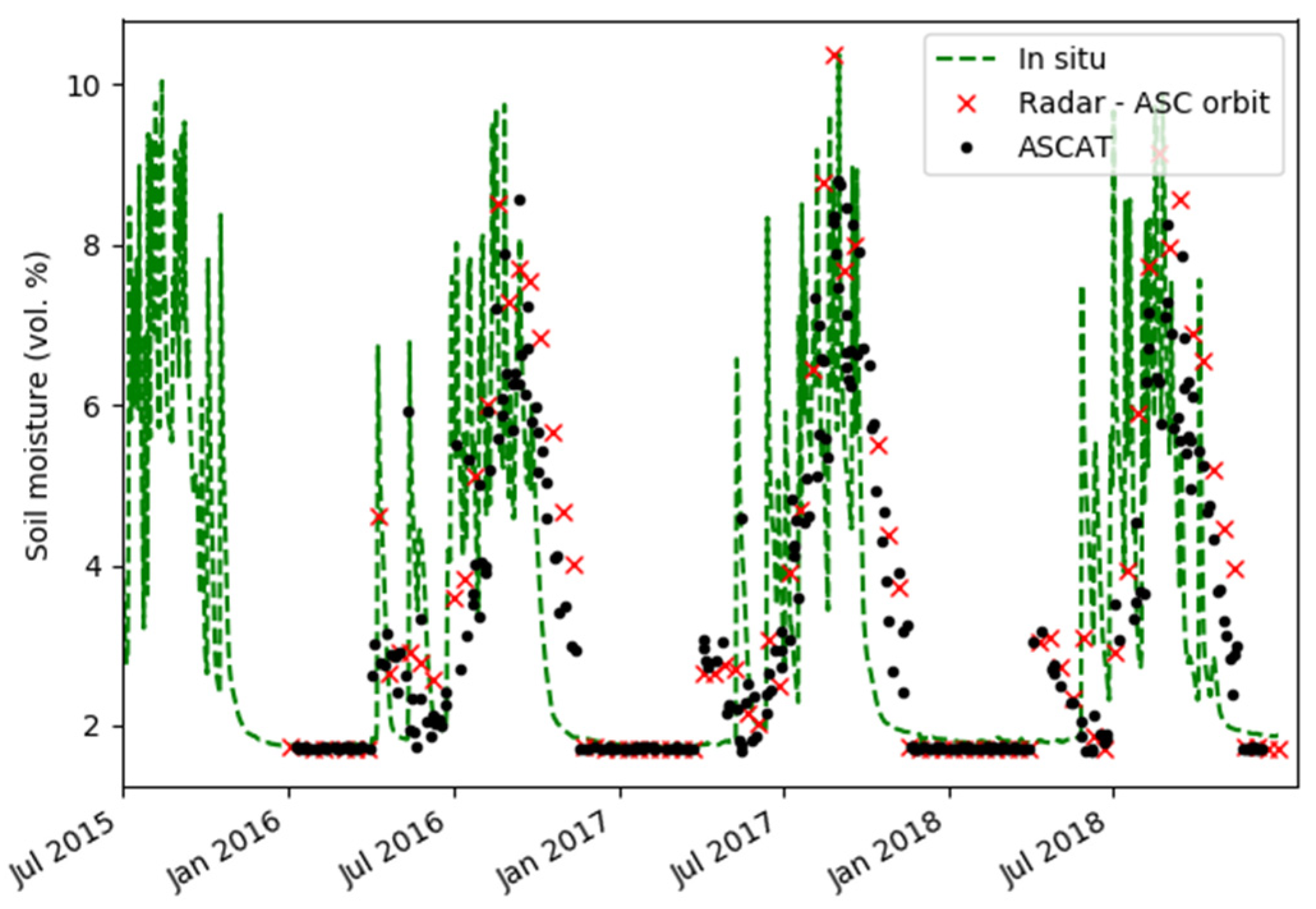
4.2.1. Niger
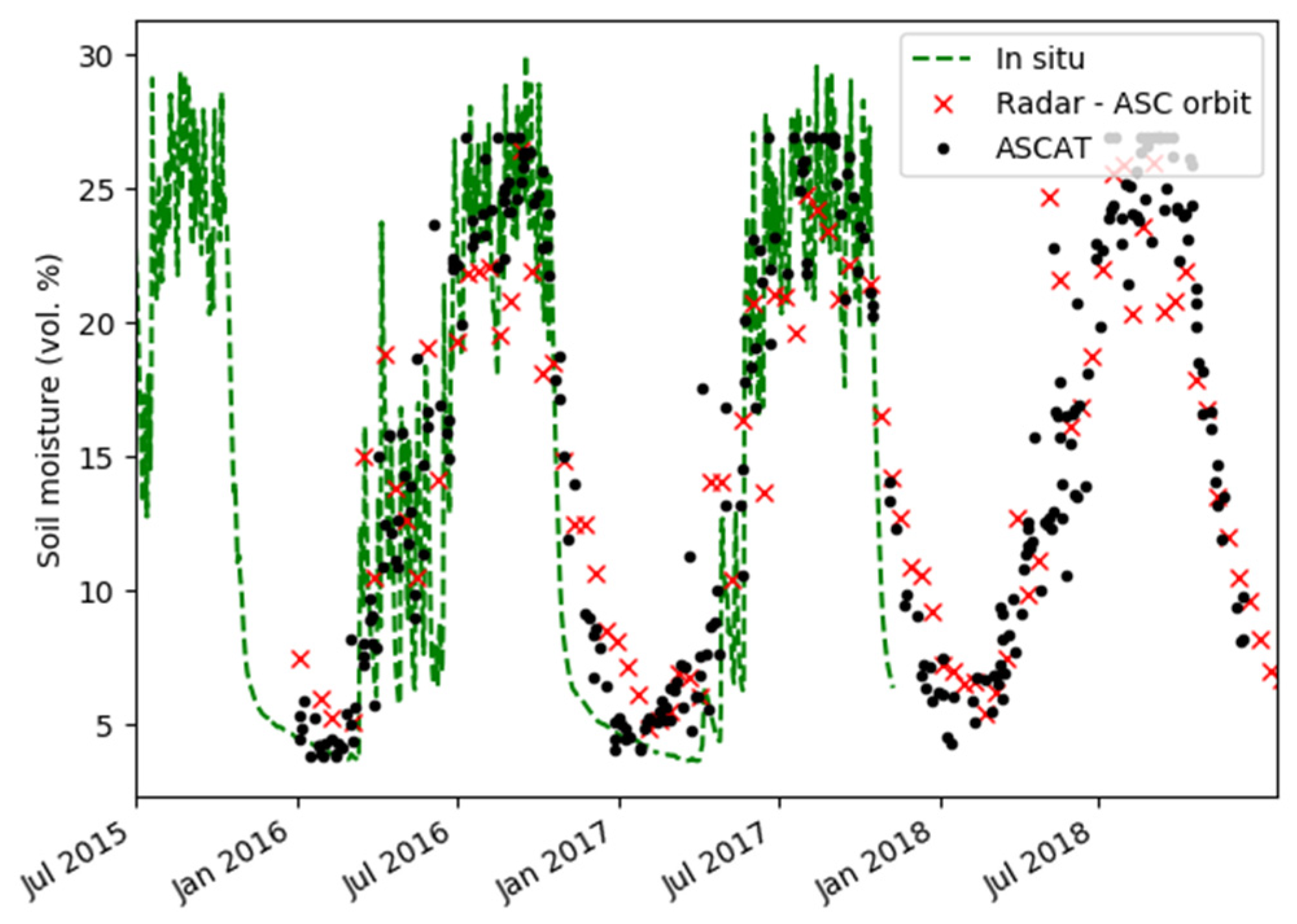
4.2.2. Benin
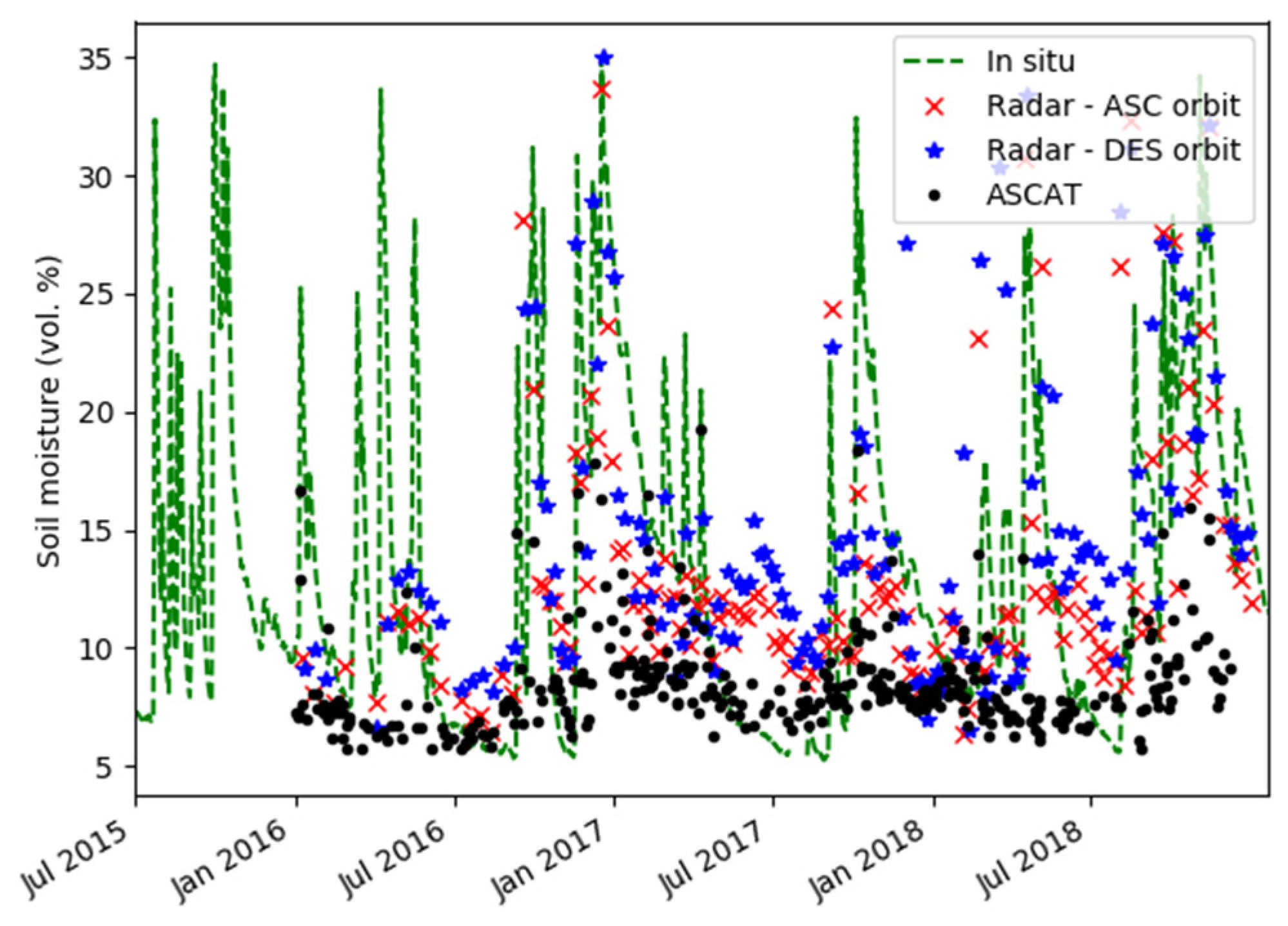
4.2.3. Tunisia
4.2.4. The Occitania Region (South of France)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Koster, R.; Dirmeyer, P.A.; Guo, Z.; Bonan, G.; Chan, E.; Cox, P.M.; Gordon, C.T.; Kanae, S.; Kowalczyk, E.; Lawrence, D.M.; et al. Regions of Strong Coupling Between Soil Moisture and Precipitation. Science 2004, 305, 1138–1140. [Google Scholar] [CrossRef] [PubMed]
- Anguela, T.P.; Zribi, M.; Hasenauer, S.; Habets, F.; Loumagne, C. Analysis of surface and root-zone soil moisture dynamics with ERS scatterometer and the hydrometeorological model SAFRAN-ISBA-MODCOU at Grand Morin watershed (France). Hydrol. Earth Syst. Sci. 2008. [CrossRef]
- Manfreda, S.; Scanlon, T.M.; Caylor, K.K. On the importance of accurate depiction of infiltration processes on modelled soil moisture and vegetation water stress. Ecohydrology 2009, 3, 155–165. [Google Scholar] [CrossRef]
- Brocca, L.; Ciabatta, L.; Moramarco, T.; Ponziani, F.; Berni, N.; Wagner, W. Use of satellite soil moisture products for the operational mitigation of landslides risk in central Italy. In Satellite Soil Moisture Retrieval; Elsevier: New York, NY, USA, 2016; pp. 231–247. [Google Scholar]
- Albergel, C.; Balsamo, G.; de Rosnay, P.; Muñoz Sabater, J.; Boussetta, S. A bare ground evaporation revision in the ECMWF land-surface scheme: Evaluation of its impact using ground soil moisture and satellite microwave data. Hydrol. Earth Syst. Sci. 2012, 9, 3607–3620. [Google Scholar] [CrossRef]
- Habets, F.; Gascoin, S.; Korkmaz, S.; Thiéry, D.; Zribi, M.; Amraoui, N.; Carli, M.; Ducharne, A.; Leblois, E.; Ledoux, E.; et al. Multi-model comparison of a major flood in the groundwater-fed basin of the Somme River (France). Hydrol. Earth Syst. Sci. 2010, 14, 99–117. [Google Scholar] [CrossRef]
- Fieuzal, R.; Duchemin, B.; Jarlan, L.; Zribi, M.; Baup, F.; Merlin, O.; Hagolle, O.; Garatuza-Payan, J. Combined use of optical and radar satellite data for the monitoring of irrigation and soil moisture of wheat crops. Hydrol. Earth Syst. Sci. 2011, 15, 1117–1129. [Google Scholar] [CrossRef]
- Barrett, B.W.; Dwyer, E.; Whelan, P. Soil Moisture Retrieval from Active Spaceborne Microwave Observations: An Evaluation of Current Techniques. Remote Sens. 2009, 1, 210–242. [Google Scholar] [CrossRef]
- Jackson, T.J.; Cosh, M.H.; Bindlish, R.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Goodrich, D.C.; Moran, M.S.; Du, J. Validation of Advanced Microwave Scanning Radiometer Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4256–4272. [Google Scholar] [CrossRef]
- De Jeu, R.; Dorigo, W. On the importance of satellite observed soil moisture. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 107–109. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Rott, H. A Method for Estimating Soil Moisture from ERS Scatterometer and Soil Data. Remote Sens. Environ. 1999, 70, 191–207. [Google Scholar] [CrossRef]
- Paloscia, S.; Macelloni, G.; Santi, E. Soil Moisture Estimates From AMSR-E Brightness Temperatures by Using a Dual-Frequency Algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3135–3144. [Google Scholar] [CrossRef]
- Naeimi, V.; Scipal, K.; Bartalis, Z.; Hasenauer, S.; Wagner, W. An Improved Soil Moisture Retrieval Algorithm for ERS and METOP Scatterometer Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1999–2013. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Rodriguez-Fernandez, N.J.; Aires, F.; Richaume, P.; Kerr, Y.H.; Prigent, C.; Kolassa, J.; Cabot, F.; Jiménez, C.; Mahmoodi, A.; Drusch, M. Soil Moisture Retrieval Using Neural Networks: Application to SMOS. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1–17. [Google Scholar] [CrossRef]
- Wigneron, J.-P.; Jackson, T.; O’Neill, P.E.; De Lannoy, G.; De Rosnay, P.; Walker, J.P.; Ferrazzoli, P.; Mironov, V.; Bircher, S.; Grant, J.; et al. Modelling the passive microwave signature from land surfaces: A review of recent results and application to the L-band SMOS & SMAP soil moisture retrieval algorithms. Remote Sens. Environ. 2017, 192, 238–262. [Google Scholar]
- Burgin, M.S.; Colliander, A.; Njoku, E.G.; Chan, S.K.; Cabot, F.; Kerr, Y.H.; Bindlish, R.; Jackson, T.J.; Entekhabi, D.; Yueh, S.H. A Comparative Study of the SMAP Passive Soil Moisture Product With Existing Satellite-Based Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2959–2971. [Google Scholar] [CrossRef]
- Moran, M. Soil moisture evaluation using multi-temporal synthetic aperture radar (SAR) in semiarid rangeland. Agric. For. Meteorol. 2000, 105, 69–80. [Google Scholar] [CrossRef]
- Mattia, F.; Dente, L.; Satalino, G.; Pasquariello, G. Using a priori information to improve soil moisture retrieval from ENVISAT ASAR AP data in semiarid regions. IEEE Trans. Geosci. Remote Sens. 2006, 44, 900–912. [Google Scholar] [CrossRef]
- Mattia, F.; Satalino, G.; Pauwels, V.R.N.; Loew, A. Soil moisture retrieval through a merging of multi-temporal L-band SAR data and hydrologic modelling. Hydrol. Earth Syst. Sci. 2009, 13, 343–356. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Bignami, C. Soil moisture estimation over vegetated terrains using multitemporal remote sensing data. Remote Sens. Environ. 2010, 114, 440–448. [Google Scholar] [CrossRef]
- Zribi, M.; Chahbi, A.; Shabou, M.; Chabaane, Z.L.; Duchemin, B.; Baghdadi, N.; Amri, R.; Chehbouni, A. Soil surface moisture estimation over a semi-arid region using ENVISAT ASAR radar data for soil evaporation evaluation. Hydrol. Earth Syst. Sci. 2011, 15, 345–358. [Google Scholar] [CrossRef]
- Balenzano, A.; Mattia, F.; Satalino, G.; Davidson, M.W.J. Dense Temporal Series of C- and L-band SAR Data for Soil Moisture Retrieval Over Agricultural Crops. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 4, 439–450. [Google Scholar] [CrossRef]
- Lievens, H.; Verhoest, N. Spatial and temporal soil moisture estimation from RADARSAT-2 imagery over Flevoland, The Netherlands. J. Hydrol. 2012, 456, 44–56. [Google Scholar] [CrossRef]
- Balenzano, A.; Mattia, F.; Satalino, G.; Pauwels, V.R.N.; Snoeij, P. SMOSAR algorithm for soil moisture retrieval using Sentinel-1 data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 1200–1203. [Google Scholar]
- Gorrab, A.; Zribi, M.; Baghdadi, N.; Mougenot, B.; Fanise, P.; Chabaane, Z.L. Retrieval of Both Soil Moisture and Texture Using TerraSAR-X Images. Remote Sens. 2015, 7, 10098–10116. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, B.; Fan, H.; Huang, J.; Zhao, H. The Potential Use of Multi-Band SAR Data for Soil Moisture Retrieval over Bare Agricultural Areas: Hebei, China. Remote Sens. 2015, 8, 7. [Google Scholar] [CrossRef]
- Kim, S.-B.; Van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S.; Jackson, T.J.; Jaruwatanadilok, S.; West, R.; et al. Surface Soil Moisture Retrieval Using the L-Band Synthetic Aperture Radar Onboard the Soil Moisture Active–Passive Satellite and Evaluation at Core Validation Sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef]
- Verhoest, N.E.; Lievens, H.; Wagner, W.; Álvarez-Mozos, J.; Moran, M.S.; Mattia, F. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from Synthetic Aperture Radar. Sensors 2008, 8, 4213–4248. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Chabaane, Z.L.; Baghdadi, N.; El Hajj, M.; Gao, Q.; Mougenot, B. Potential of Sentinel-1 Radar Data for the Assessment of Soil and Cereal Cover Parameters. Sensors 2017, 17, 2617. [Google Scholar] [CrossRef]
- Fung, A.; Li, Z.; Chen, K. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Dubois, P.C.; van Zyl, J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 915–926. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T.U. Semi-empirical model of the ensemble-averaged differential Mueller matrix for microwave backscattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1348–1355. [Google Scholar] [CrossRef]
- Baghdadi, N.; Choker, M.; Zribi, M.; El-Hajj, M.; Paloscia, S.; Verhoest, N.; Lievens, H.; Baup, F.; Mattia, F. A new empirical model for radar scattering from bare soil surfaces. Remote Sens. 2016, 8, 920. [Google Scholar] [CrossRef]
- Attema, E.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Baghdadi, N.; El-Hajj, M.; Zribi, M.; Bousbih, S. Calibration of the Water Cloud Model at C-Band for Winter Crop Fields and Grasslands. Remote Sens. 2017, 9, 969. [Google Scholar] [CrossRef]
- Aubert, M.; Baghdadi, N.; Zribi, M.; Ose, K.; El Hajj, M.; Vaudour, E.; Gonzalez-Sosa, E. Toward an Operational Bare Soil Moisture Mapping Using TerraSAR-X Data Acquired Over Agricultural Areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 900–916. [Google Scholar] [CrossRef]
- Bindlish, R.; Barros, A.P. Multifrequency Soil Moisture Inversion from SAR Measurements with the Use of IEM. Remote Sens. Environ. 2000, 71, 67–88. [Google Scholar] [CrossRef]
- Pierdicca, N.; Castracane, P.; Pulvirenti, L. Inversion of electromagnetic models for bare soil parameter estimation from multifrequency polarimetric SAR data. Sensors 2008, 8, 8181–8200. [Google Scholar] [CrossRef]
- Zhu, L.; Walker, J.P.; Ye, N.; Rüdiger, C. Roughness and vegetation change detection: Apre-processing for soil moisture retrieval from multi-temporal SAR imagery. Remote Sens. Environ. 2019, 225, 93–106. [Google Scholar] [CrossRef]
- Zribi, M.; Dechambre, M. An new empirical model to retrieve soil moisture and roughness from Radar Data. Remote Sens. Environ. 2003, 84, 42–52. [Google Scholar] [CrossRef]
- Srivastava, H.S.; Patel, P.; Sharma, Y.; Navalgund, R.R. Large-Area Soil Moisture Estimation Using Multi-Incidence-Angle RADARSAT-1 SAR Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2528–2535. [Google Scholar] [CrossRef]
- Jagdhuber, T.; Hajnsek, I.; Papathanassiou, K.P. An iterative generalized hybrid decomposition for soil moisture retrieval under vegetation cover using fullty polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3911–3922. [Google Scholar] [CrossRef]
- Hajnsek, I.; Jagdhuber, T.; Schon, H.; Papathanassiou, K.P. Potenial of estimating soil moisture under vegetation cover by means of PolSAR. IEEE Trans. Geosci. Remote Sens. 2009, 47, 442–454. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goita, K. Comparison of different polarimetric decompositions for soil moisture retrieval over vegetation covered agricultural area. Remote Sens. Environ. 2017, 199, 120–136. [Google Scholar] [CrossRef]
- He, L.; Panciera, R.; Tanase, M.A.; Walker, J.P.; Qin, Q. Soil moisture retrieval in agricultural fields using adaptive model-based polarimetric decomposition of SAR data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4445–4460. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic Use of Sentinel-1 and Sentinel-2 Images for Operational Soil Moisture Mapping at High Spatial Resolution over Agricultural Areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef]
- Liu, Z.; Li, P.; Yang, J. Soil Moisture Retrieval and Spatio temporal Pattern Analysis Using Sentinel-1 Data of Dahra, Senegal. Remote Sens. 2017, 9, 1197. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.; Baghdadi, N. Synergetic Use of Sentinel-1 and Sentinel-2 Data for Soil Moisture Mapping at 100 m Resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; El Hajj, M.; Baghdadi, N.; Lili-Chabaane, Z.; Gao, Q.; Fanise, P. Soil Moisture and Irrigation Mapping in A Semi-Arid Region, Based on the Synergetic Use of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2018, 10, 1953. [Google Scholar] [CrossRef]
- Merlin, O.; Jacob, F.; Wigneron, J.P.; Walker, J.; Chehbouni, G. Multidimensional Disaggregation of Land Surface Temperature Using High-Resolution Red, Near-Infrared, Shortwave-Infrared, and Microwave-L Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1864–1880. [Google Scholar] [CrossRef]
- Piles, M.; Entekhabi, D.; Camps, A. A Change Detection Algorithm for Retrieving High-Resolution Soil Moisture From SMAP Radar and Radiometer Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4125–4131. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring With Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2019, 57, 520–539. [Google Scholar] [CrossRef]
- Merlin, O.; Walker, J.P.; Kalma, J.D.; Kim, E.J.; Hacker, J.; Panciera, R.; Young, R.; Summerell, G.; Hornbuckle, J.; Hafeez, M.; et al. The NAFE’06 data set: Towards soil moisture retrieval at intermediate resolution. Adv. Water Resour. 2008. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; El Hajj, M.; Zribi, M.; Belhouchette, H. A Comparison of Two Soil Moisture Products S2MP and Copernicus-SSM Over Southern France. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3366–3375. [Google Scholar] [CrossRef]
- Calvet, J.-C.; Fritz, N.; Froissard, F.; Suquia, D.; Petitpa, A.; Piguet, B. In situ soil moisture observations for the CAL/VAL of SMOS: The SMOSMANIA network. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 1196–1199. [Google Scholar]
- Calvet, J.-C.; Fritz, N.; Berne, C.; Piguet, B.; Maurel, W.; Meurey, C. Deriving pedotransfer functions for soil quartz fraction in southern France from reverse modeling. SOIL 2016, 2, 615–629. [Google Scholar] [CrossRef]
- Lebel, T.; Cappelaere, B.; Galle, S.; Hanan, N.; Kergoat, L.; Levis, S.; Vieux, B.; Descroix, L.; Gosset, M.; Mougin, E.; et al. AMMA-CATCH studies in the Sahelian region of West-Africa: An overview. J. Hydrol. 2009, 375, 3–13. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A multi-temporal method for cloud detection, applied to FORMOSAT-2, VENµS, LANDSAT and SENTINEL-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef]
- Pellarin, T.; Wagner, W.; Calvet, J.-C. Evaluation of ERS scatterometer soil moisture products over a half-degree region in southwestern France. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Tomer, S.K.; Al Bitar, A.; Sekhar, M.; Zribi, M.; Bandyopadhyay, S.; Sreelash, K.; Sharma, A.K.; Corgne, S.; Kerr, Y.H. Retrieval and Multi-scale Validation of Soil Moisture from Multi-temporal SAR Data in a Semi-Arid Tropical Region. Remote Sens. 2015, 7, 8128–8153. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel 1 | Sentinel 2 | MODIS | ASCAT | |
|---|---|---|---|---|
| Satellite launch | S-1A: 3 April 2014 S-1B: 25 April 2016 | S-2A: 23 June 2015 S-2B: 7 March 2017 | 18 December 1999 | 19 October 2006 |
| Image type | Radar 2 orbits (ASC/DES) 2 polarizations (VV/VH) | Optical | Optical | Radar |
| Temporal resolution | 6 or 12 days Some gaps due to orbit geometry | 5 or 6 days Some gaps due to weather conditions | 8 days Some gaps due to weather conditions | 3 days |
| Spatial resolution | 10 m | 10 m | 250 m | 25 km |
| Country | Closest City | ID | GPS Coordinates | Sentinel Tile | MODIS Tile |
|---|---|---|---|---|---|
| France | Savenes | SVN | - | 31TCJ | h18v04 |
| France | Narbonne | NBN | - | 31TDH | h18v04 |
| France | Mouthoumet | MTM | - | 31TDH | h18v04 |
| Tunisia | Hmidate | HMD | 35.48° N 9.84° E | 32SNE | h18v05 |
| Tunisia | INGC | INGC | 35.62° N 9.94° E | 32SNE | h18v05 |
| Niger | Niamey | BZ1 | 13.56° N 2.66° E | 31PDR | h18v07 |
| Benin | Djougou | BLM | 9.74° N 1.60° E | 31PCL | h18v08 |
| RMSE | R | Bias | ubRMSE | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SMES | ASCAT | SMES | ASCAT | SMES | ASCAT | SMES | ASCAT | |||
| Niger | ASC | General | 1.6 | 1.6 | 0.62 | 0.70 | 0.0 | 0.4 | 1.6 | 1.6 |
| BZ1 | ||||||||||
| Benin | ASC | General | 4.4 | 4.4 | 0.91 | 0.94 | −0.6 | −3.1 | 4.4 | 3.2 |
| BLM | ||||||||||
| Tunisia | ASC+DES | General + Proc 3 | 5.4 | 7.3 | 0.65 | 0.47 | −0.7 | 4.3 | 5.3 | 5.9 |
| INGC | ASC | 5.5 | 0.62 | 0.1 | 5.5 | |||||
| DES | 5.2 | 0.69 | −1.4 | 5.0 | ||||||
| Tunisia | ASC+DES | General + Proc 3 | 2.8 | 2.5 | 0.39 | 0.36 | −0.6 | 1.1 | 2.8 | 2.2 |
| Hmidate | ASC | 2.9 | 0.26 | −0.3 | 2.9 | |||||
| DES | 2.8 | 0.51 | −1.0 | 2.6 | ||||||
| France | ASC+DES | General + Proc 1/2/3 | 7.2 | 4.8 | 0.08 | 0.65 | −1.6 | 0.8 | 7.0 | 4.7 |
| Narbonne | ASC | 7.3 | 0.07 | −1.7 | 7.1 | |||||
| DES | 7.2 | 0.08 | −2.0 | 6.9 | ||||||
| France | ASC+DES | General + Proc 1/2/3 | 9.9 | 9.7 | 0.23 | 0.39 | −2.6 | −2.4 | 9.6 | 9.4 |
| Savenes | ASC | 9.2 | 0.32 | −2.1 | 8.9 | |||||
| DES | 10.7 | 0.14 | −2.1 | 10.2 | ||||||
| France | ASC+DES | General + Proc 1/2/3 | 3.4 | 4.2 | 0.78 | 0.64 | −0.3 | 0.4 | 3.4 | 4.2 |
| Mouthoumet | ASC | 3.0 | 0.82 | −0.0 | 3.0 | |||||
| DES | 3.9 | 0.70 | −0.9 | 3.8 | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foucras, M.; Zribi, M.; Albergel, C.; Baghdadi, N.; Calvet, J.-C.; Pellarin, T. Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy. Water 2020, 12, 866. https://doi.org/10.3390/w12030866
Foucras M, Zribi M, Albergel C, Baghdadi N, Calvet J-C, Pellarin T. Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy. Water. 2020; 12(3):866. https://doi.org/10.3390/w12030866
Chicago/Turabian StyleFoucras, Myriam, Mehrez Zribi, Clément Albergel, Nicolas Baghdadi, Jean-Christophe Calvet, and Thierry Pellarin. 2020. "Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy" Water 12, no. 3: 866. https://doi.org/10.3390/w12030866
APA StyleFoucras, M., Zribi, M., Albergel, C., Baghdadi, N., Calvet, J.-C., & Pellarin, T. (2020). Estimating 500-m Resolution Soil Moisture Using Sentinel-1 and Optical Data Synergy. Water, 12(3), 866. https://doi.org/10.3390/w12030866