
Sensitivity of Change-Point Detection and Trend Estimates to GNSS IWV Time Series Properties


Abstract
:1. Introduction
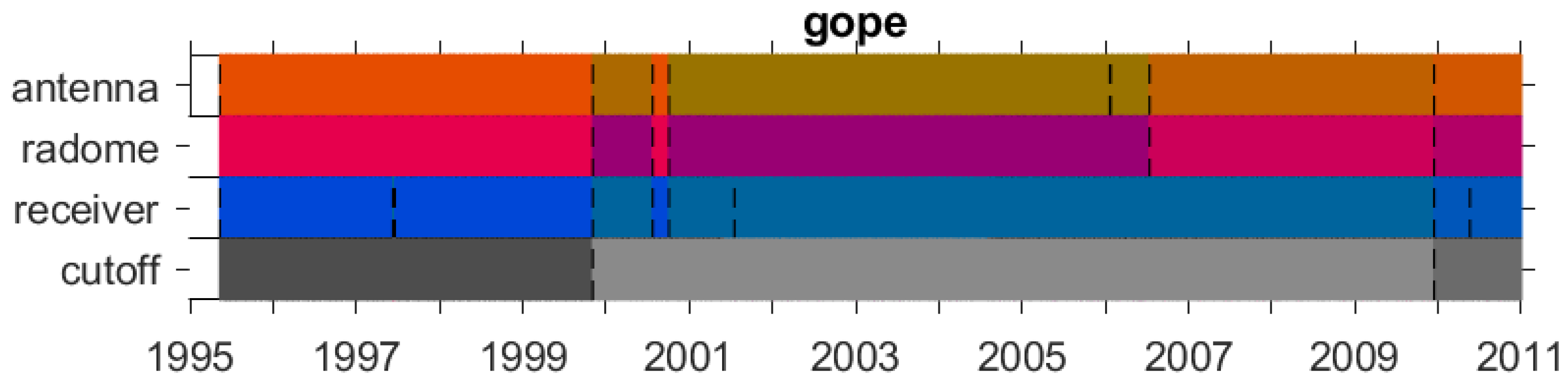
- Equipment changes (antenna, radome, and receiver). Each antenna/radome pair has a particular impact on the measurements, which is taken into account at the processing level with a specific calibration model (see Section 2). However, model imperfections, multipath and on-site electromagnetic coupling with the antenna’s environment, and equipment aging are responsible for small biases which can change over time. The quality of measurements also depends on the receivers. Modern receivers have more stable clocks, reduced cycle slips, and noise and are capable of observing satellites from new GNSS systems (GPS, GLONASS, etc.). Hence, changes in data quality/properties are expected, which can introduce offsets and possibly trends (e.g., when new satellites are introduced progressively). Changes in receiver settings, such as cutoff angle, are also known to produce abrupt changes in the mean IWV estimates [19].
- Changes in the environment near the receiver antenna can introduce multipath and obstructions that alter the measurements and cause inhomogeneities.
- Processing changes. The details of the data processing are known to impact the IWV estimates. The most important aspects and parameters are the tropospheric model (the mapping functions, the a priori hydrostatic model, the time-dependency), the antenna/radome calibration models, the elevation-dependent weighting, and the cutoff angle (see Section 2).
2. Materials and Methods
2.1. GNSS IWV Data
- ECWMF grid estimates of a priori ZHD and ZWD distributed by Technical University of Vienna [40],
- Vienna mapping function (VMF1) for the hydrostatic and wet delays [40],
- IGb08 reference frame and igs08_1852.atx absolute antenna PCO/PCV models,
- 3° elevation cutoff angle,
- 1/cos(zenith) observation weighting, and
- GPS observations (1994–2001) and GPS + GLONASS (2002–2014).
2.2. Reference IWV Data
2.3. Homogenization Method
2.4. Trend Estimation Method
3. Results
3.1. Segmentation Results
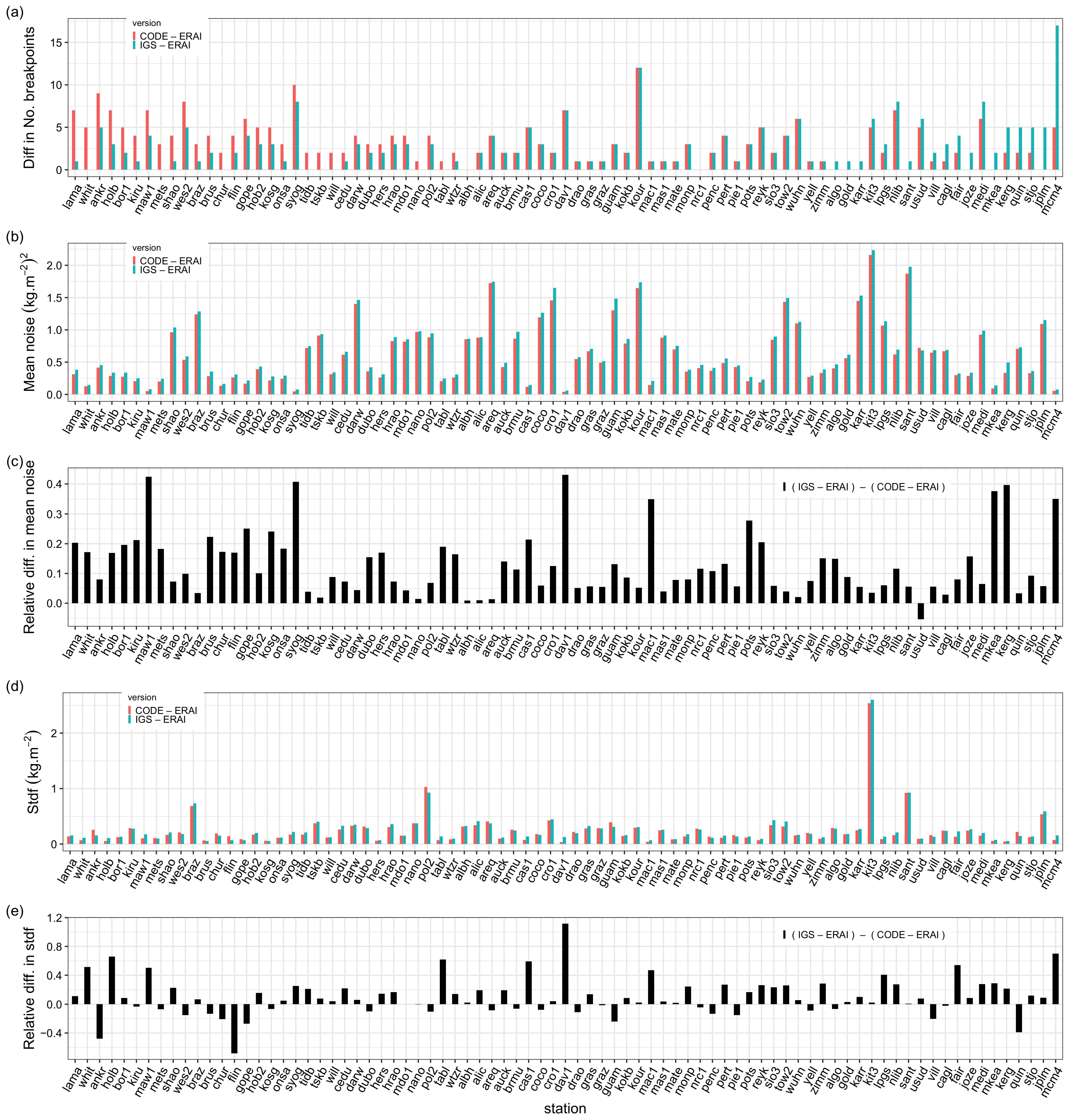
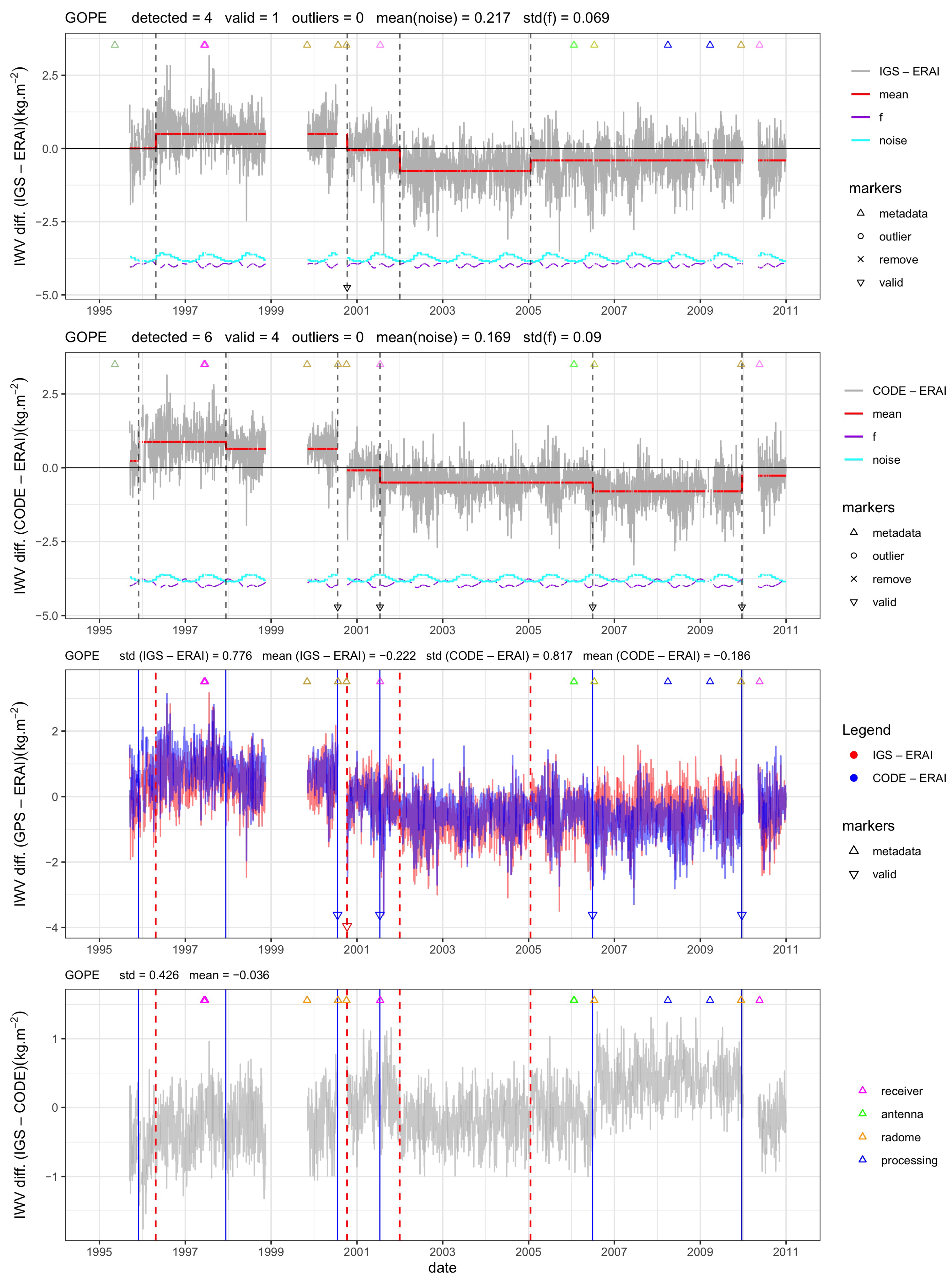
3.1.1. Impact of GNSS Data Processing
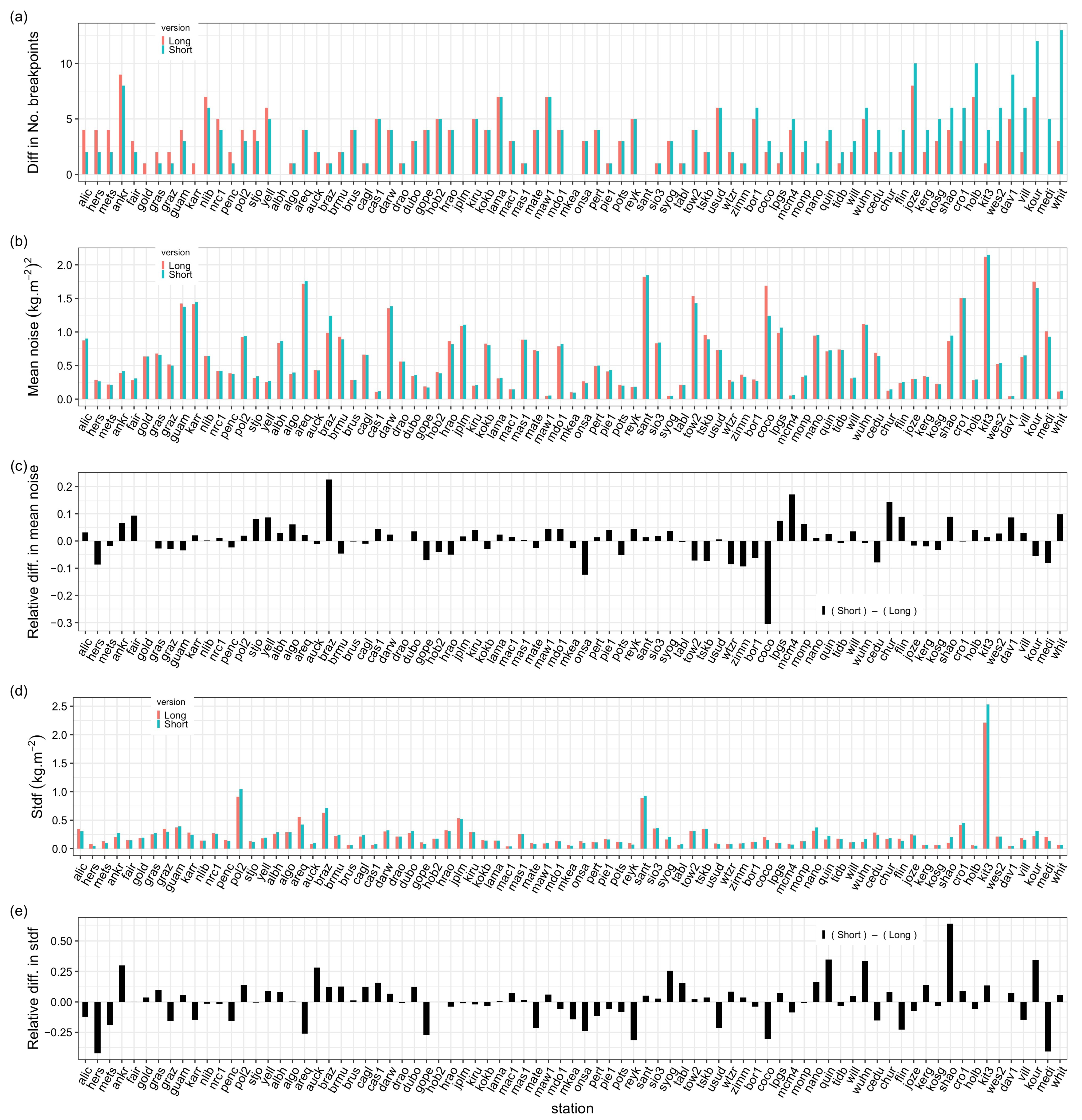
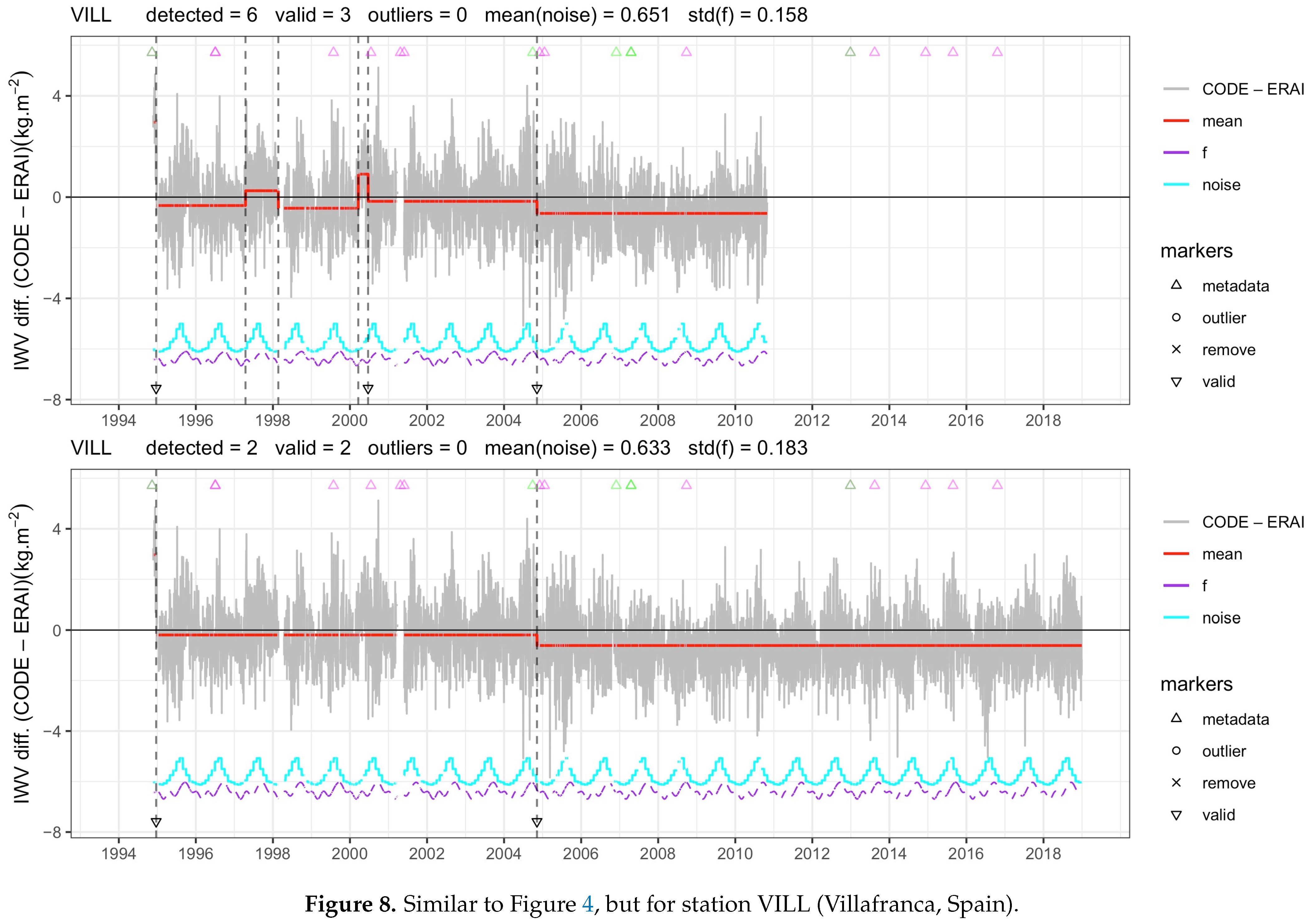
3.1.2. Impact of the Length of Time Series
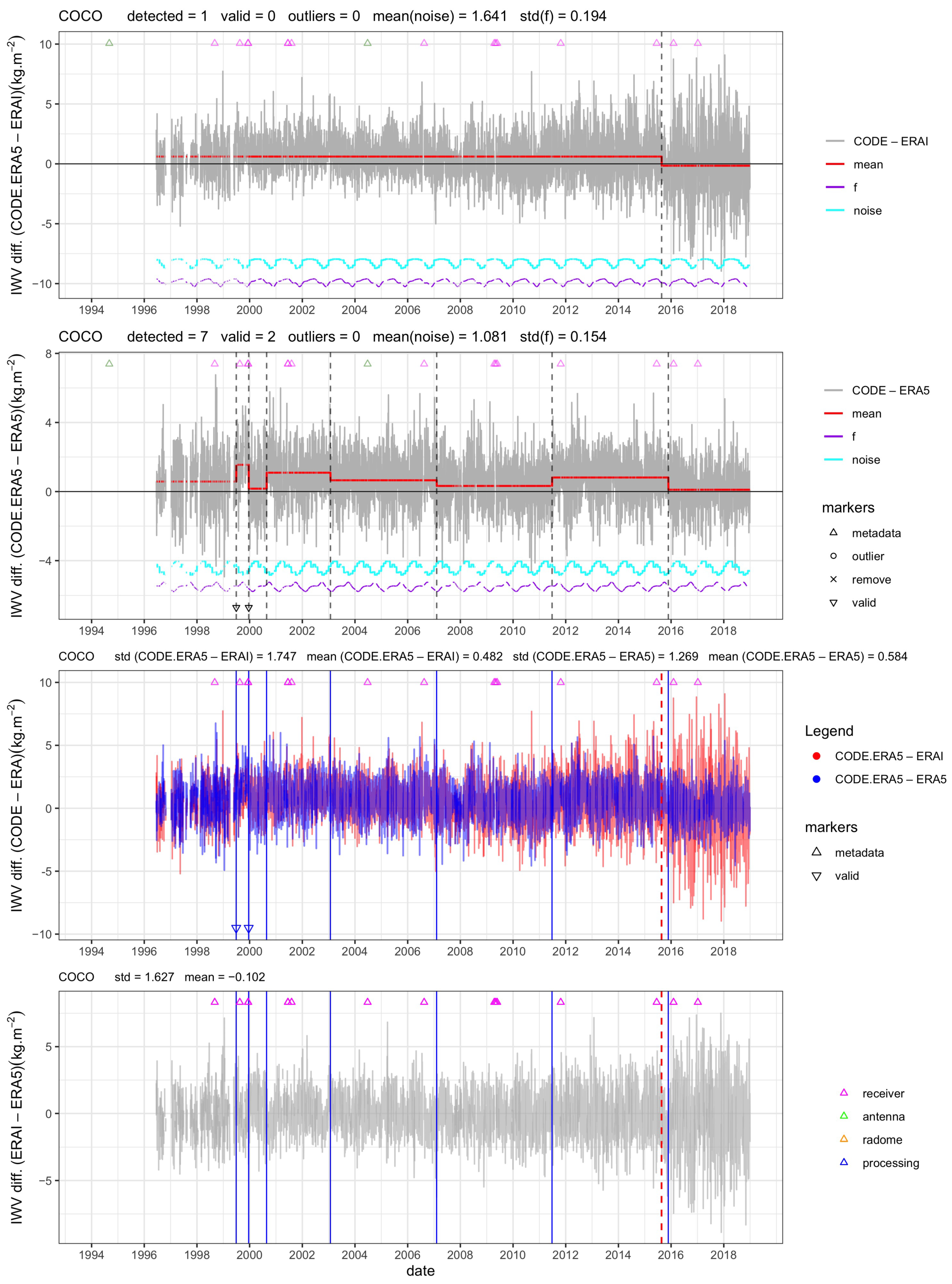
3.1.3. Impact of the Reference Data Set
3.1.4. Impact of the Auxiliary Data Set
3.2. IWV Trend Estimates
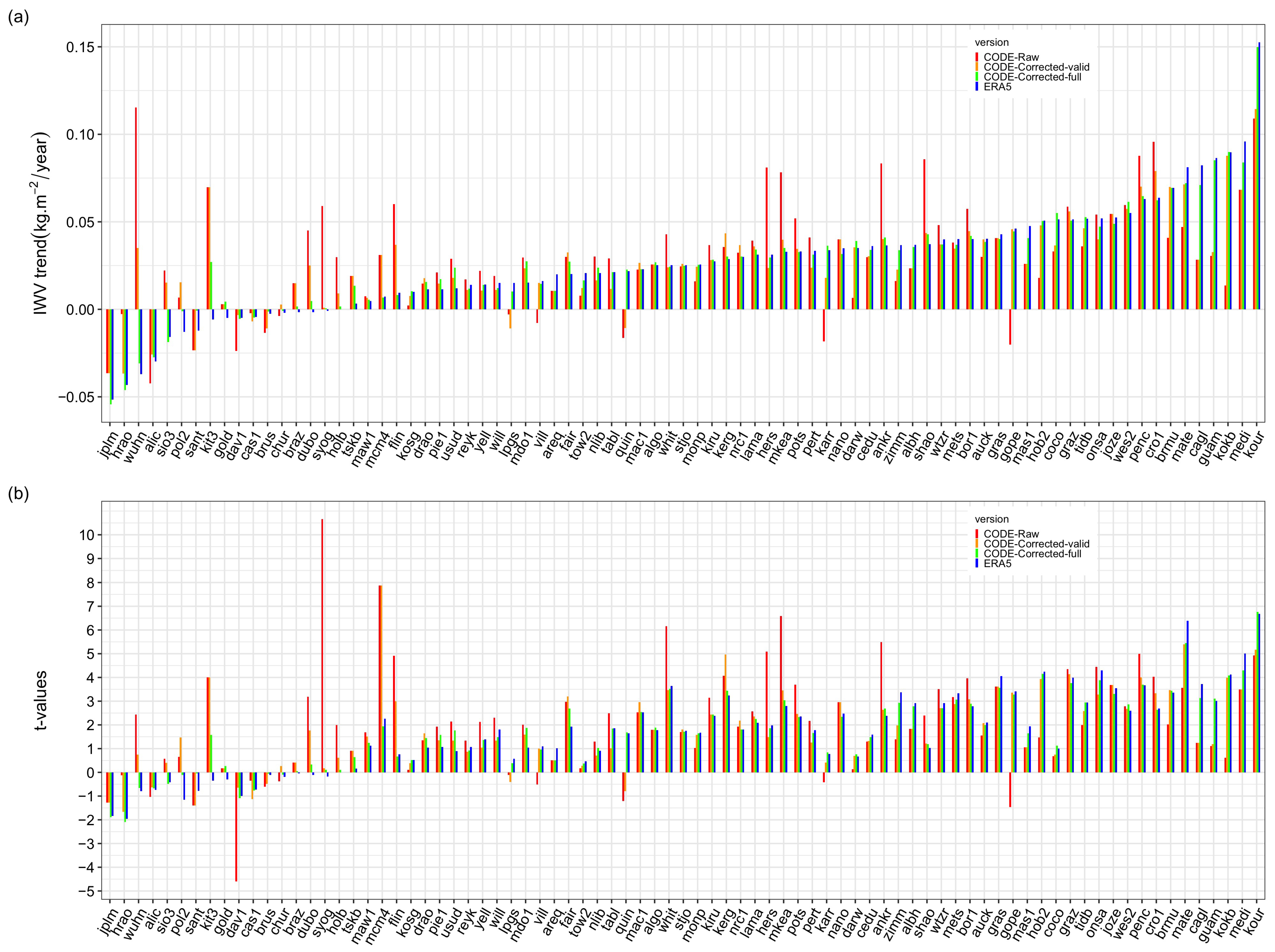
3.2.1. Impact of GNSS and Reanalysis Data Set Properties on Trend Estimates
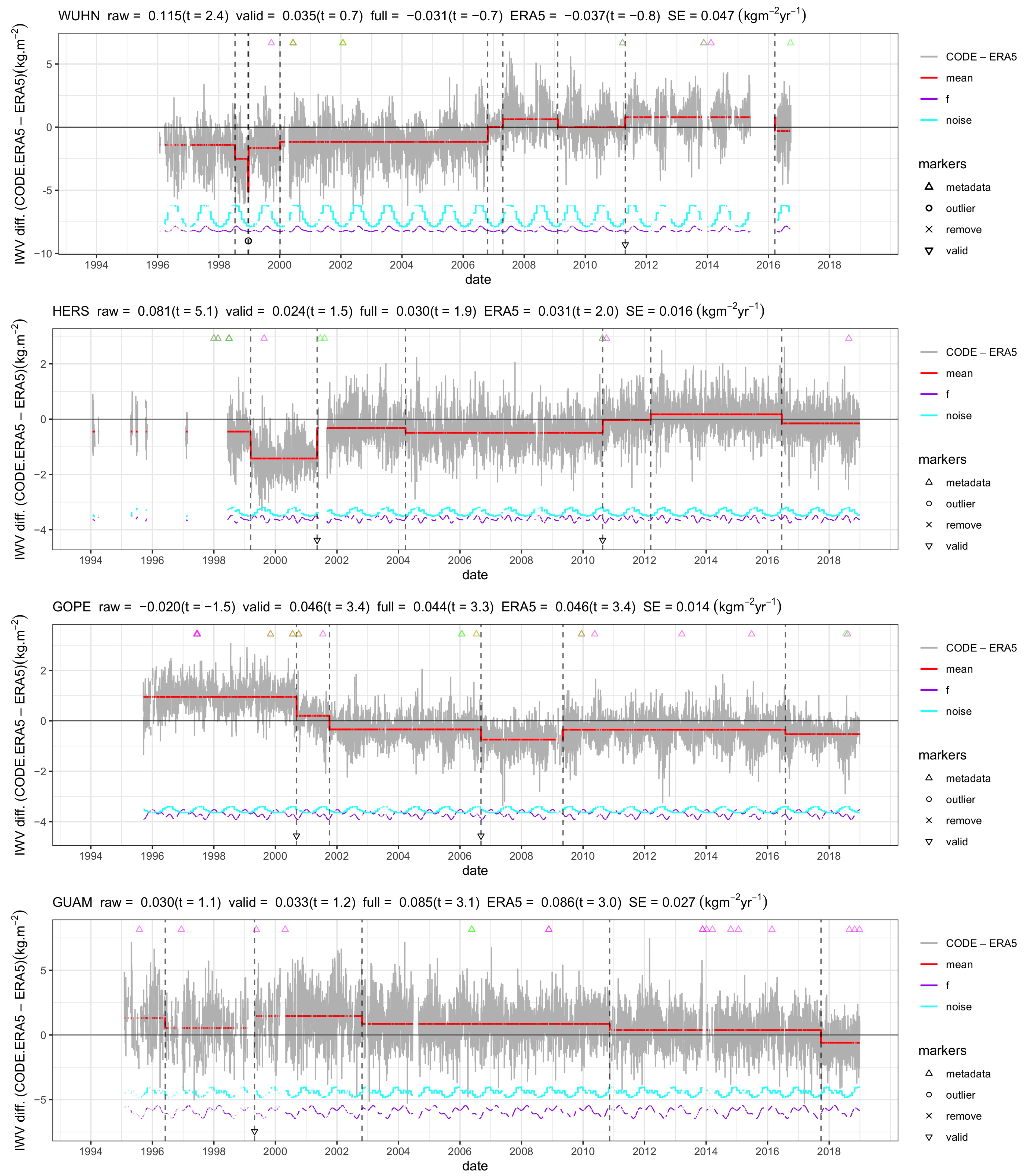
3.2.2. Impact of Homogenization on GNSS Trend Estimates
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CODE | Center for Orbit Determination in Europe |
| ECMWF | European Center for Medium-Range Weather Forecasts |
| ERP | Earth Rotation Parameter |
| ERAI | ECMWF reanalysis Interim |
| ERA5 | ECMWF reanalysis v5 |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GMF | Global Mapping Function |
| IGS | International GNSS Service |
| IWV | Integrated water vapor |
| JPL/NASA | NASA’s Jet Propulsion Laboratory |
| NMF | Neill Mapping Function |
| PC0 | Phase Center Offset |
| PCV | Phase Center Variation |
| PWV | Precipitable Water Vapor |
| VMF | Vienna Mapping Function |
| ZHD | Zenith Hydrostatic Delay |
| ZTD | Zenith Tropospheric Delay |
| ZWD | Zenith Wet Delay |
References
- Caussinus, H.; Mestre, O. Detection and correction of artificial shifts in climate series. J. R. Stat. Soc. Ser. C Appl. Stat. 2004, 53, 405–425. [Google Scholar] [CrossRef]
- Reeves, J.; Chen, J.; Wang, X.L.; Lund, R.; Lu, Q.Q. A Review and Comparison of Changepoint Detection Techniques for Climate Data. J. Appl. Meteorol. Climatol. 2007, 46, 900–915. [Google Scholar] [CrossRef]
- Jones, P.D.; Raper, S.C.B.; Bradley, R.S.; Diaz, H.F.; Kellyo, P.M.; Wigley, T.M.L. Northern Hemisphere Surface Air Temperature Variations: 1851–1984. J. Clim. Appl. Meteorol. 1986, 25, 161–179. [Google Scholar] [CrossRef] [Green Version]
- Easterling, D.; Peterson, T. A new method for detecting undocumented discontinuities in climatological time series. Int. J. Climatol. 1995, 15, 369–377. [Google Scholar] [CrossRef]
- Peterson, T.C.; Easterling, D.R.; Karl, T.R.; Groisman, P.; Nicholls, N.; Plummer, N.; Torok, S.; Auer, I.; Boehm, R.; Gullett, D.; et al. Homogeneity adjustments of in situ atmospheric climate data: A review. Int. J. Climatol. A J. R. Meteorol. Soc. 1998, 18, 1493–1517. [Google Scholar] [CrossRef]
- Menne, M.J.; Williams, C.N. Detection of Undocumented Changepoints Using Multiple Test Statistics and Composite Reference Series. J. Clim. 2005, 18, 4271–4286. [Google Scholar] [CrossRef]
- Szentimrey, T. Development of MASH homogenization procedure for daily data. In Proceedings of the Fifth Seminar for Homogenization and Quality Control in Climatological Databases, WCDMP-No. 71, Budapest, Hungary, 29 May–2 June 2008; pp. 123–130. [Google Scholar]
- Costa, A.C.; Soares, A. Homogenization of Climate Data: Review and New Perspectives Using Geostatistics. Math. Geosci. 2009, 41, 291–305. [Google Scholar] [CrossRef]
- Venema, V.K.C.; Mestre, O.; Aguilar, E.; Auer, I.; Guijarro, J.A.; Domonkos, P.; Vertacnik, G.; Szentimrey, T.; Stepanek, P.; Zahradnicek, P.; et al. Benchmarking homogenization algorithms for monthly data. Clim. Past 2012, 8, 89–115. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Bussinger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Bock, O.; Bosser, P.; Bourcy, T.; David, L.; Goutail, F.; Hoareau, C.; Keckhut, P.; Legain, D.; Pazmino, A.; Pelon, J.; et al. Accuracy assessment of water vapour measurements from in situ and remote sensing techniques during the DEMEVAP 2011 campaign at OHP. Atmos. Meas. Tech. 2013, 6, 2777–2802. [Google Scholar] [CrossRef] [Green Version]
- Van Malderen, R.; Brenot, H.; Pottiaux, E.; Beirle, S.; Hermans, C.; De Maziere, M.; Wagner, T.; De Backer, H.; Bruyninx, C. A multi-site intercomparison of integrated water vapour observations for climate change analysis. Atmos. Meas. Tech. 2014, 7, 2487–2512. [Google Scholar] [CrossRef] [Green Version]
- Ning, T.; Wickert, J.; Deng, Z.; Heise, S.; Dick, G.; Vey, S.; Schöne, T. Homogenized Time Series of the Atmospheric Water Vapor Content Obtained from the GNSS Reprocessed Data. J. Clim. 2016, 29, 2443–2456. [Google Scholar] [CrossRef]
- Parracho, A.C.; Bock, O.; Bastin, S. Global IWV trends and variability in atmospheric reanalyses and GPS observations. Atmos. Chem. Phys. 2018, 18, 16213–16237. [Google Scholar] [CrossRef] [Green Version]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Gelaro, R.; McCarty, W.; Suárez, M.J.; Todling, R.; Molod, A.; Takacs, L.; Randles, C.A.; Darmenov, A.; Bosilovich, M.G.; Reichle, R.; et al. The Modern-Era Retrospective Analysis for Research and Applications, Version 2 (MERRA-2). J. Clim. 2017, 30, 5419–5454. [Google Scholar] [CrossRef] [PubMed]
- Bock, O.; Parracho, A. Consistency and representativeness of integrated water vapour from ground-based GPS observations and ERA-Interim reanalysis. Atmos. Chem. Phys. 2019, 19, 9453–9468. [Google Scholar] [CrossRef] [Green Version]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 Global Reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2046. [Google Scholar] [CrossRef]
- Vey, S.; Dietrich, R.; Fritsche, M.; Rülke, A.; Steigenberger, P.; Rothacher, M. On the homogeneity and interpretation of precipitable water time series derived from global GPS observations. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Domonkos, P. Adapted Caussinus-Mestre Algorithm for Networks of Temperature series (ACMANT). Int. J. Geosci. 2011, 2, 293–309. [Google Scholar] [CrossRef] [Green Version]
- Quarello, A. Development of New Homogenisation Methods for GNSS Atmospheric Data. Application to the Analysis of Climate Trends and Variability. Ph.D. Thesis, Sorbonne Universite, Paris, France, 2020. [Google Scholar]
- Van Malderen, R.; Pottiaux, E.; Klos, A.; Domonkos, P.; Elias, M.; Ning, T.; Bock, O.; Guijarro, J.; Alshawaf, F.; Hoseini, M.; et al. Homogenizing GPS Integrated Water Vapor Time Series: Benchmarking Break Detection Methods on Synthetic Data Sets. Earth Space Sci. 2020, 7, e2020EA001121. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.; Montenbruck, O. (Eds.) Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS 2010 Conventions; Technical Report; IERS: Frankfurt-am-Main, Germany, 2010. [Google Scholar]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; de Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef] [Green Version]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Bock, O. Standardization of ZTD screening and IWV conversion. In Advanced GNSS Tropospheric Products for Monitoring Severe Weather Events and Climate: COST Action ES1206 Final Action Dissemination Report; Jones, J., Guerova, G., Douša, J., Dick, G., de Haan, S., Pottiaux, E., Bock, O., Pacione, R., van Malderen, R., Eds.; Springer International Publishing AG: Cham, Switzerland, 2020; Chapter 5; pp. 314–324. [Google Scholar] [CrossRef]
- Bock, O.; Bosser, P.; Flamant, C.; Doerflinger, E.; Jansen, F.; Fages, R.; Bony, S.; Schnitt, S. Integrated water vapour observations in the Caribbean arc from a network of ground-based GNSS receivers during EUREC4A. Earth Syst. Sci. Data 2021, 13, 2407–2436. [Google Scholar] [CrossRef]
- Tregoning, P.; Herring, T.A. Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith total delays. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef] [Green Version]
- Schmid, R.; Dach, R.; Collilieux, X.; Jäggi, A.; Schmitz, M.; Dilssner, F. Absolute IGS antenna phase center model igs08.atx: Status and potential improvements. J. Geod. 2015, 90, 343–364. [Google Scholar] [CrossRef] [Green Version]
- Ning, T.; Wang, J.; Elgered, G.; Dick, G.; Wickert, J.; Bradke, M.; Sommer, M.; Querel, R.; Smale, D. The uncertainty of the atmospheric integrated water vapour estimated from GNSS observations. Atmos. Meas. Tech. 2016, 9, 79–92. [Google Scholar] [CrossRef] [Green Version]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Byun, S.H.; Bar-Sever, Y.E. A new type of troposphere zenith path delay product of the international GNSS service. J. Geod. 2009, 83, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Boehm, J.; Niell, A.E.; Tregoning, P.; Schuh, H. The Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Niell, A.E. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Susnik, A.; Dach, R.; Villiger, A.; Maier, A.; Arnold, D.; Schaer, S.; Jäggi, A. CODE Reprocessing Product Series. 2016. Available online: https://boris.unibe.ch/80011/ (accessed on 25 August 2021). [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; User Manual. 2015. Available online: https://boris.unibe.ch/72297/ (accessed on 8 May 2012). [CrossRef]
- Dach, R.; Schaer, S.; Arnold, D.; Orliac, E.; Prange, L.; Susnik, A.; Villiger, A.; Jäggi, A. CODE Final Product Series for the IGS; 2018. Available online: https://boris.unibe.ch/119490/ (accessed on 25 August 2021). [CrossRef]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. 2006, 11, 2406. [Google Scholar] [CrossRef]
- Bock, O.; Pacione, R.; Ahmed, F.; Araszkiewicz, A.; Bałdysz, Z.; Balidakis, K.; Barroso, C.; Bastin, S.; Beirle, S.; Berckmans, J.; et al. Use of GNSS Tropospheric Products for Climate Monitoring (Working Group 3). In Advanced GNSS Tropospheric Products for Monitoring Severe Weather Events and Climate; Jones, J., Guerova, G., Douša, J., Dick, G., de Haan, S., Pottiaux, E., Bock, O., Pacione, R., van Malderen, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 267–402. [Google Scholar]
- Stepniak, K.; Bock, O.; Wielgosz, P. Reduction of ZTD outliers through improved GNSS data processing and screening strategies. Atmos. Meas. Tech. 2018, 11, 1347–1361. [Google Scholar] [CrossRef] [Green Version]
- Bock, O. GPS Data: Daily and Monthly Reprocessed IWV Data from 120 Global GPS Stations, Version 1.2. 2016. Available online: https://observations.ipsl.fr/espri/metadata/global_gps_iwv_v1.2.html/ (accessed on 25 August 2021). [CrossRef]
- Bock, O. Global GNSS IWV Data at 436 Stations over the 1994–2018 Period. 2019. Available online: https://www.aeris-data.fr/metadata/metadata/?5829bd3d-4593-4e66-bce2-c8c6311360af (accessed on 25 August 2012). [CrossRef]
- Quarello, A.; Bock, O.; Lebarbier, E. A new segmentation method for the homogenisation of GNSS-derived IWV time-series. arXiv 2020, arXiv:2005.04683. [Google Scholar]
- Birgé, L.; Massart, P. Gaussian model selection. J. Eur. Math. Soc. 2001, 3, 203–268. [Google Scholar] [CrossRef] [Green Version]
- Lebarbier, E. Detecting Multiple Change-Points in the Mean of Gaussian Process by Model Selection. Signal Process. 2005, 85, 717–736. [Google Scholar] [CrossRef] [Green Version]
- Weatherhead, E.C.; Reinsel, G.C.; Tiao, G.C.; Meng, X.; Choi, D.; Cheang, W.; Keller, T.; DeLuisi, J.; Wuebbles, D.J.; Kerr, J.B.; et al. Factors affecting the detection of trends: Statistical considerations and applications to environmental data. J. Geophys. Res. Atmos. 1998, 103, 17149–17161. [Google Scholar] [CrossRef]
- Koulali, A.; Clarke, P.J. Effect of antenna snow intrusion on vertical GPS position time series in Antarctica. J. Geod. 2020, 94. [Google Scholar] [CrossRef]
- Dunn, R.J.H.; Stanitski, D.M.; Gobron, N.; Willett, K.M. Global Climate [in “State of the Climate in 2019”]. Bull. Am. Meteorol. Soc. 2020, 101, S9–S127. [Google Scholar] [CrossRef]
- Ulbrich, U.; Lionello, P.; Belušić, D.; Jacobeit, J.; Knippertz, P.; Kuglitsch, F.G.; Leckebusch, G.C.; Luterbacher, J.; Maugeri, M.; Maheras, P.; et al. 5—Climate of the Mediterranean: Synoptic Patterns, Temperature, Precipitation, Winds, and Their Extremes. In The Climate of the Mediterranean Region; Lionello, P., Ed.; Elsevier: Oxford, UK, 2012; pp. 301–346. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IGS Repro1 | CODE REPRO2015 | |
|---|---|---|
| Software | GIPSY OASIS II | Bernese GNSS software v5.3 |
| Strategy | PPP solution | Double-difference solution of a global network |
| Orbits, clocks, ERPs | IGS repro1 (1995.0–2008.0) + IGS final (2008.0–2011.0) | CODE repro2 (1994.0–2015.0) + CODE final (2015.0–2019.0) |
| Reference frame | IGS05 | IGb08 |
| Antenna calibration | igs05.atx | igs08_1852.atx until 28 January 2017, igs14.atx from 29 January 2017 |
| Window length | 24 h | 72 h |
| Elevation cutoff angle | 7° | 3° |
| Observations | GPS | GPS (1994.0–2002.0), GPS+GLONASS (2002.0–2019.0) |
| Observation sampling | 5 min | 3 min |
| Observation weighting | uniform | where Z = zenith angle |
| Tropospheric model | ZHD and ZWD a priori: ZHD = 1.013 × 2.27 × exp(−0.116*ht), ZWD = 0.1 m. GMF mapping functions (hydrostatic and wet). Random Walk model for ZWD and gradient parameters with constraints: 3 mm h (ZWD) and 0.3 mm h (gradients). ZWD and gradient sampling: 5 min | ZHD and ZWD a priori: 6-hourly ECMWF analysis (provided by TUV). VMF1 mapping functions (hydrostatic and wet). Piece-wise linear model for ZWD with constraints: 5 m absolute and 5 m relative. Sampling: 2 h (ZWD), 24 h (gradients). |
| Tropo files | ZTD and gradient estimates provided in SINEX files (0000, 0005, … 2345 UTC) | ZTD and gradient estimates provided in SINEX files (resampled to 01, 03, … 23 UTC) |
| Coordinate estimates | Estimated once per 24 h | Estimated once per 24 h |
| Ambiguity resolution | Float | Fixed |
| (1) Impact of Processing | (2) Impact of Time Length | (3) Impact of Reference | (4) Impact of Auxiliary | |||||
|---|---|---|---|---|---|---|---|---|
| Data Set | IGS—ERAI Time-Matched | CODE—ERAI Time-Matched | CODE—ERAI Time-Limited | CODE —ERAI | CODE (b) —ERAI | CODE (b) —ERA5 | CODE (b) —ERA5 | CODE (c) —ERA5 |
| Time span | 1995–2010 | 1995–2010 | 1994–2010 | 1994–2018 (a) | 1994–2018 | 1994–2018 | 1994–2018 | 1994–2018 |
| Mean of the monthly variances (kg m) | 0.68 | 0.62 | 0.62 | 0.63 | 0.61 | 0.46 | 0.46 | 0.46 |
| Standard deviation of the functional (kg m) | 0.26 | 0.24 | 0.24 | 0.23 | 0.23 | 0.17 | 0.17 | 0.17 |
| No. detections | 231 | 257 | 296 | 249 | 364 | 398 | 398 | 392 |
| No. outliers | 36 | 38 | 73 | 40 | 60 | 71 | 71 | 87 |
| No. detections after screening | 211 | 235 | 252 | 227 | 333 | 359 | 359 | 343 |
| Validations after screening | 63 | 68 | 77 | 78 | 114 | 131 | 131 | 125 |
| Validations after screening (%) | 29.9 | 28.9 | 30.6 | 34.4 | 34.2 | 36.5 | 36.5 | 36.4 |
| Similar detections | 103∼48.8% | 185∼81.5% | 151 ∼45.3% | 243 ∼70.9% | ||||
| Time Span | 1995–2010 | 1994–2010 | 1994–2018 | ||||
|---|---|---|---|---|---|---|---|
| Std error (kg m year) | 0.035 | 0.033 | 0.018 | ||||
| ERAI (kg m year) | 0.018 ± 0.055 (9) | 0.013 ± 0.049 (10) | 0.027 ± 0.034 (37) | ||||
| ERA5 (kg m year) | 0.011± 0.052 (8) | 0.008 ± 0.047 (8) | 0.027±0.031 (35) | ||||
| GPS | IGS time-matched | CODE time-matched | CODE time-limited | CODE (a) | CODE (b) | CODE (c) | |
| Raw data | IWV trend (kg m year) | 0.024 ± 0.059 (20) | 0.018 ± 0.060 (18) | 0.016 ± 0.060 (23) | 0.033 ± 0.032 (46) | 0.030 ± 0.031 (41) | 0.030±0.031 (41) |
| RMSE wrt ERA5 (kg m year) | 0.044 | 0.046 | 0.046 | 0.033 | 0.033 | 0.033 | |
| corrected IWV by validations | IWV trend (kg m year) | 0.015± 0.052 (12) | 0.014± 0.052 (11) | 0.011± 0.052 (15) | 0.027 ± 0.027 (34) | 0.025 ± 0.030 (34) | 0.027 ± 0.026 (34) |
| RMSE wrt ERA5 (kg m year) | 0.038 | 0.039 | 0.040 | 0.019 | 0.022 | 0.019 | |
| corrected IWV by all breakpoints | IWV trend (kg m year) | 0.017 ± 0.053 (9) | 0.016 ± 0.054 (9) | 0.012 ± 0.048 (13) | 0.027 ± 0.030 (33) | 0.027 ± 0.032 (35) | 0.027 ± 0.030 (34) |
| RMSE wrt ERA5 (kg m year) | 0.021 | 0.022 | 0.022 | 0.006 | 0.012 | 0.006 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, K.N.; Quarello, A.; Bock, O.; Lebarbier, E. Sensitivity of Change-Point Detection and Trend Estimates to GNSS IWV Time Series Properties. Atmosphere 2021, 12, 1102. https://doi.org/10.3390/atmos12091102
Nguyen KN, Quarello A, Bock O, Lebarbier E. Sensitivity of Change-Point Detection and Trend Estimates to GNSS IWV Time Series Properties. Atmosphere. 2021; 12(9):1102. https://doi.org/10.3390/atmos12091102
Chicago/Turabian StyleNguyen, Khanh Ninh, Annarosa Quarello, Olivier Bock, and Emilie Lebarbier. 2021. "Sensitivity of Change-Point Detection and Trend Estimates to GNSS IWV Time Series Properties" Atmosphere 12, no. 9: 1102. https://doi.org/10.3390/atmos12091102
APA StyleNguyen, K. N., Quarello, A., Bock, O., & Lebarbier, E. (2021). Sensitivity of Change-Point Detection and Trend Estimates to GNSS IWV Time Series Properties. Atmosphere, 12(9), 1102. https://doi.org/10.3390/atmos12091102