
Estimating NOx LOTOS-EUROS CTM Emission Parameters over the Northwest of South America through 4DEnVar TROPOMI NO2 Assimilation

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Methodology
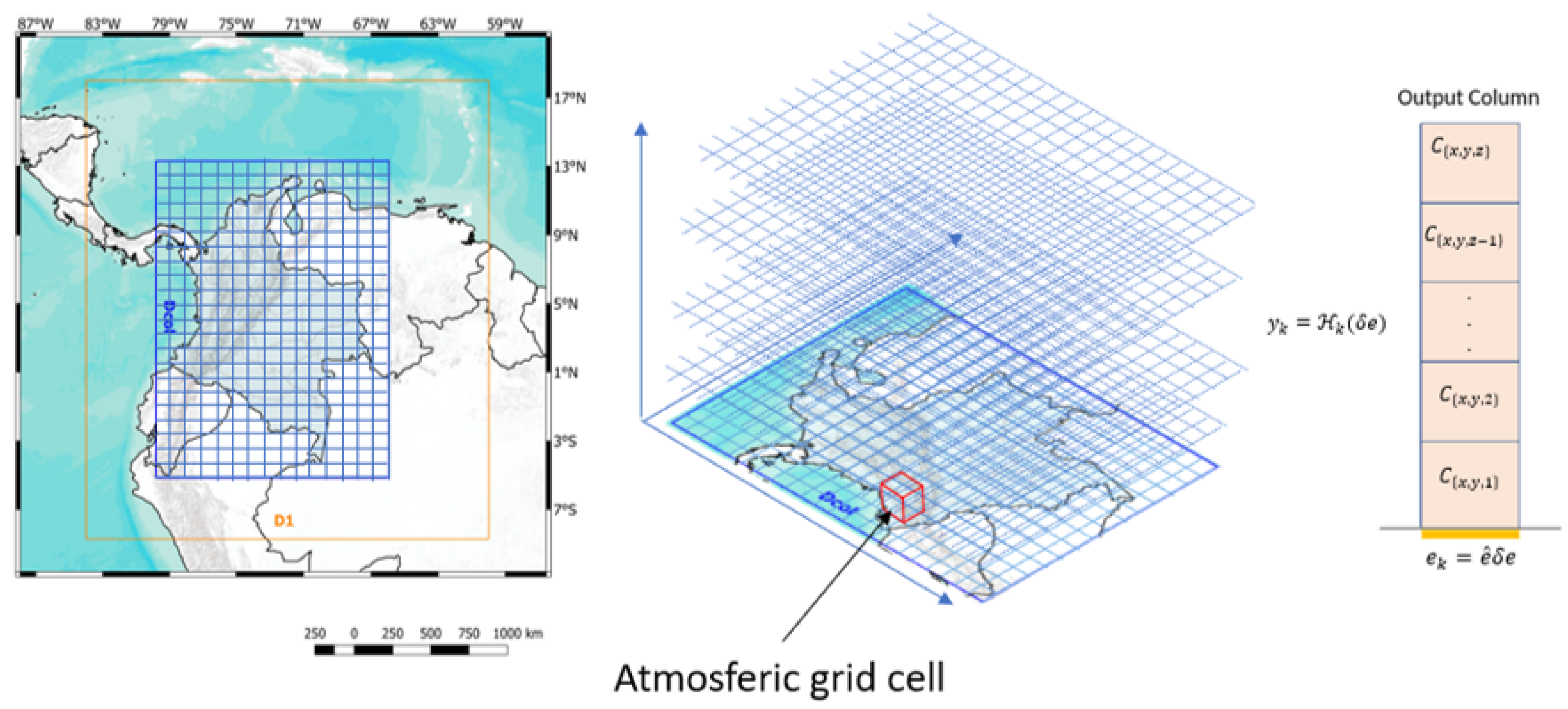
2.1. LOTOS-EUROS Simulations
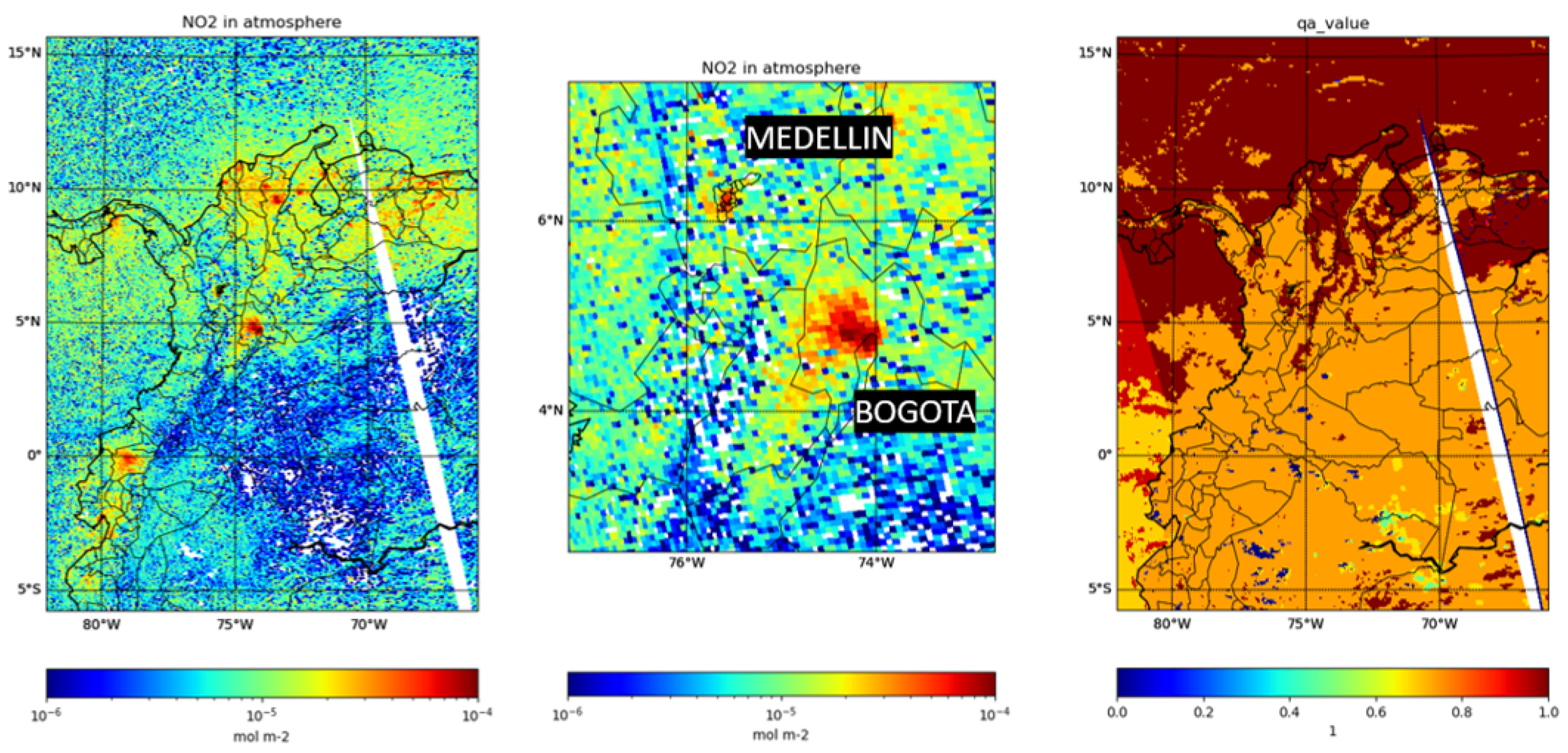
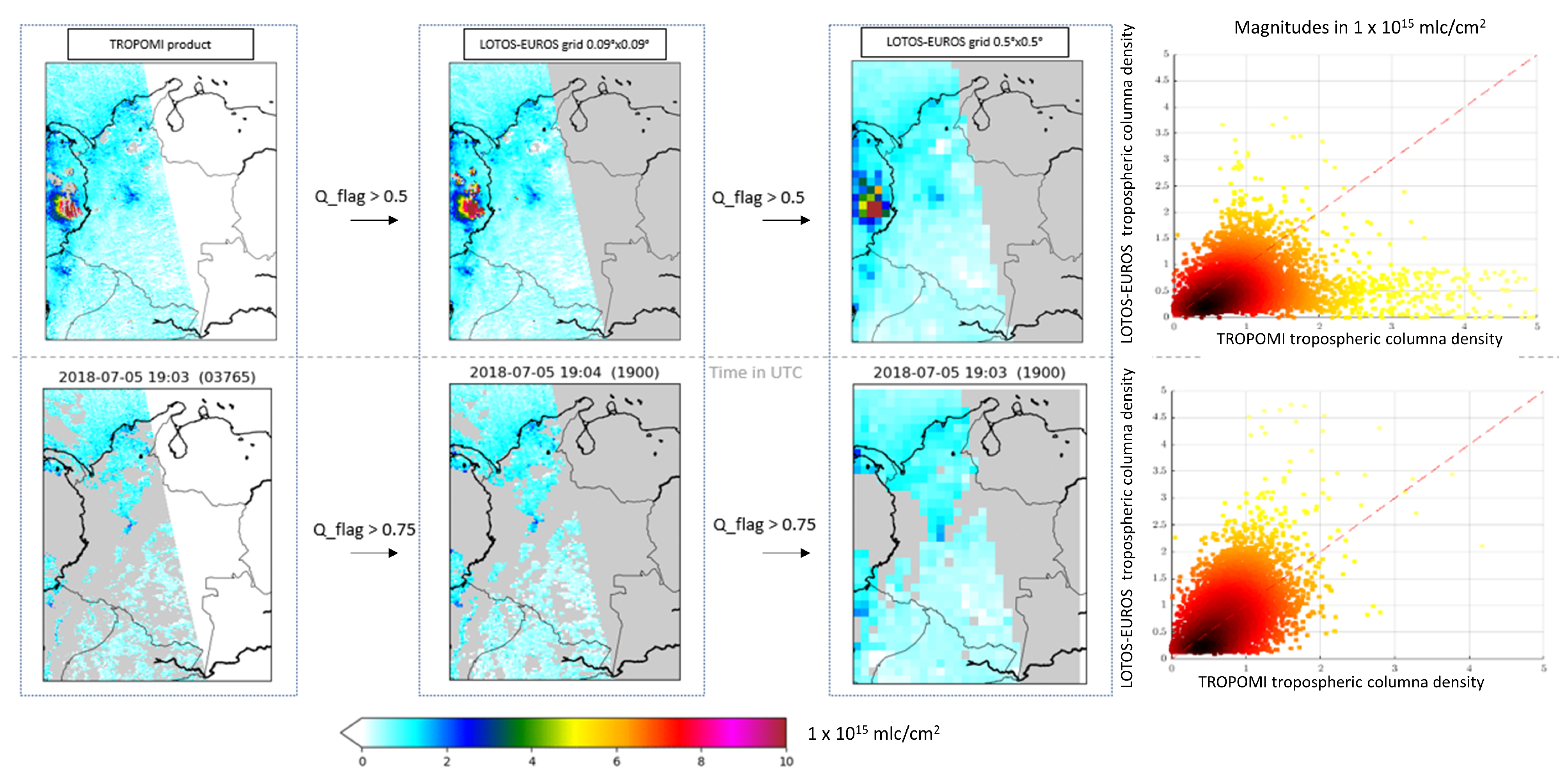
2.2. TROPOMI Satellite Data
2.3. Data for Validation
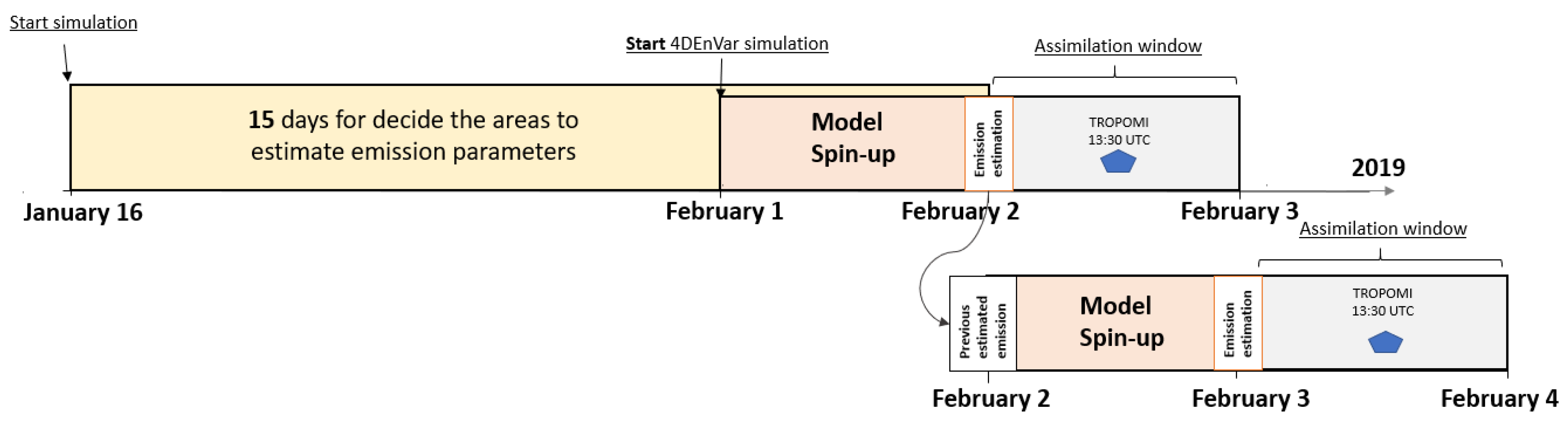
3. 4DEnVar Formulation
4. Results and Discussion
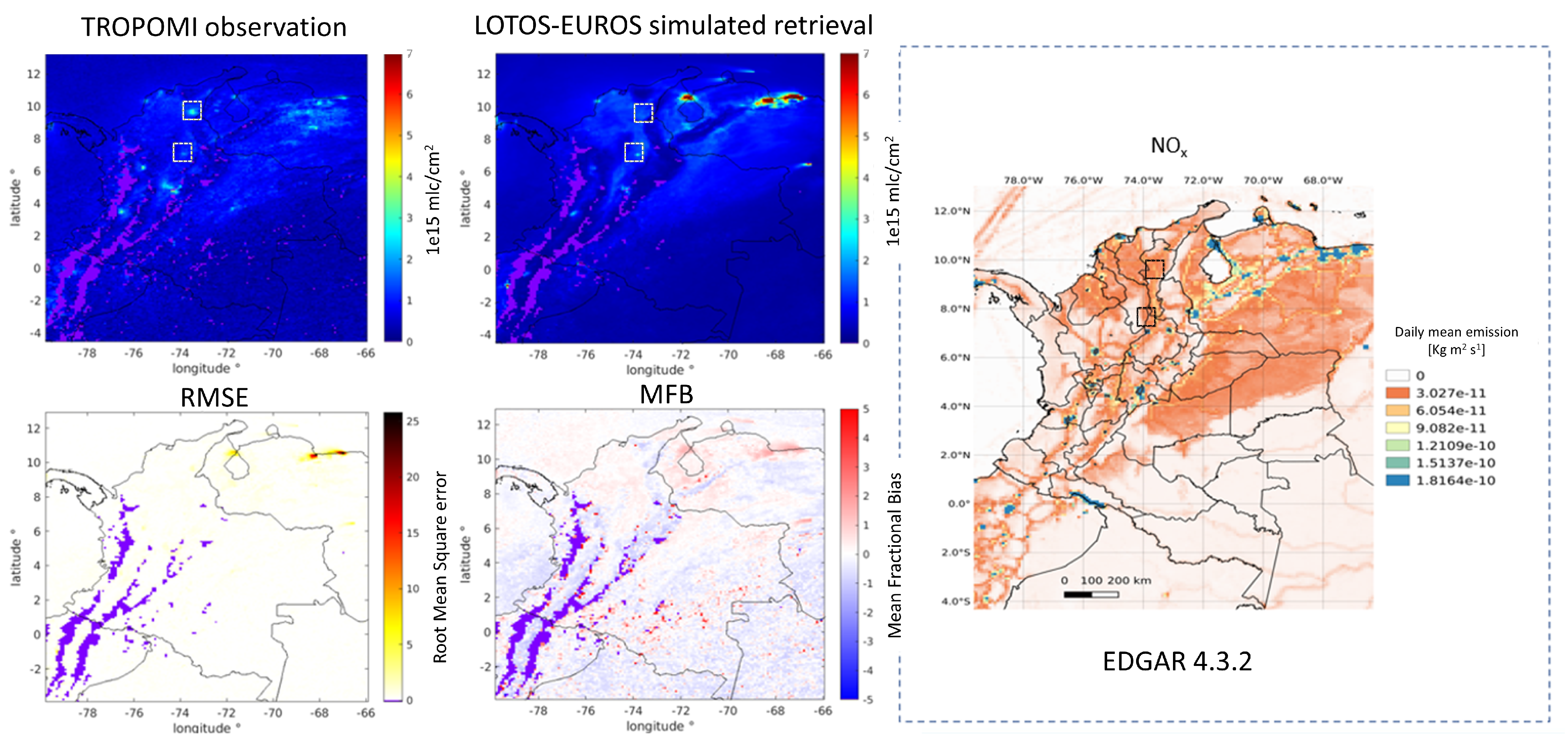
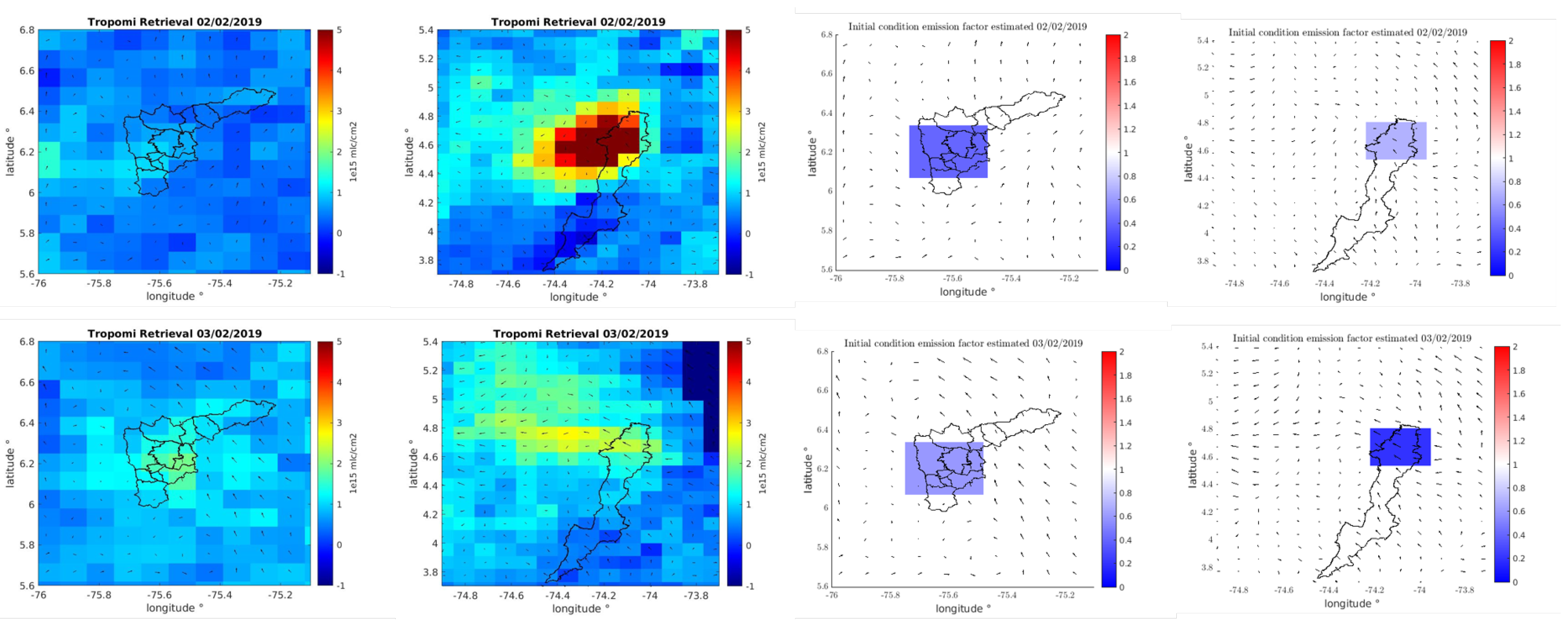
4.1. Comparison of TROPOMI Observations with LOTOS-EUROS Simulated NO Column Concentration
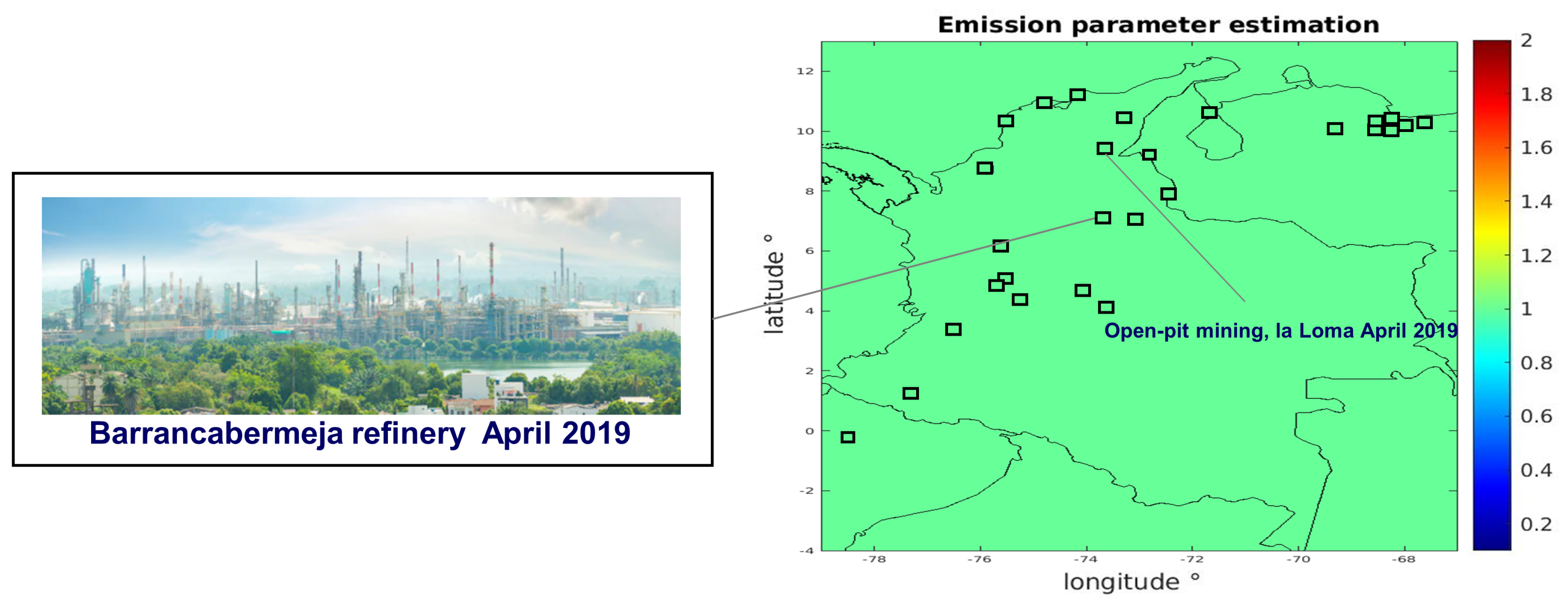
4.2. Parameter Location and Perturbation Model
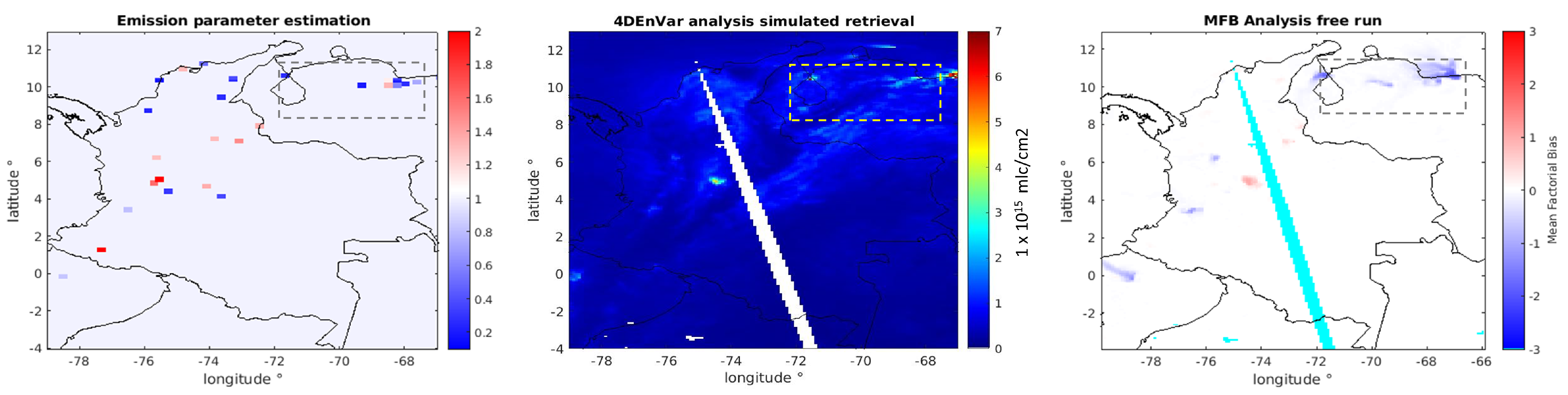
4.3. 4DEnVar LOTOS-EUROS Data Assimilation Using TROPOMI Data
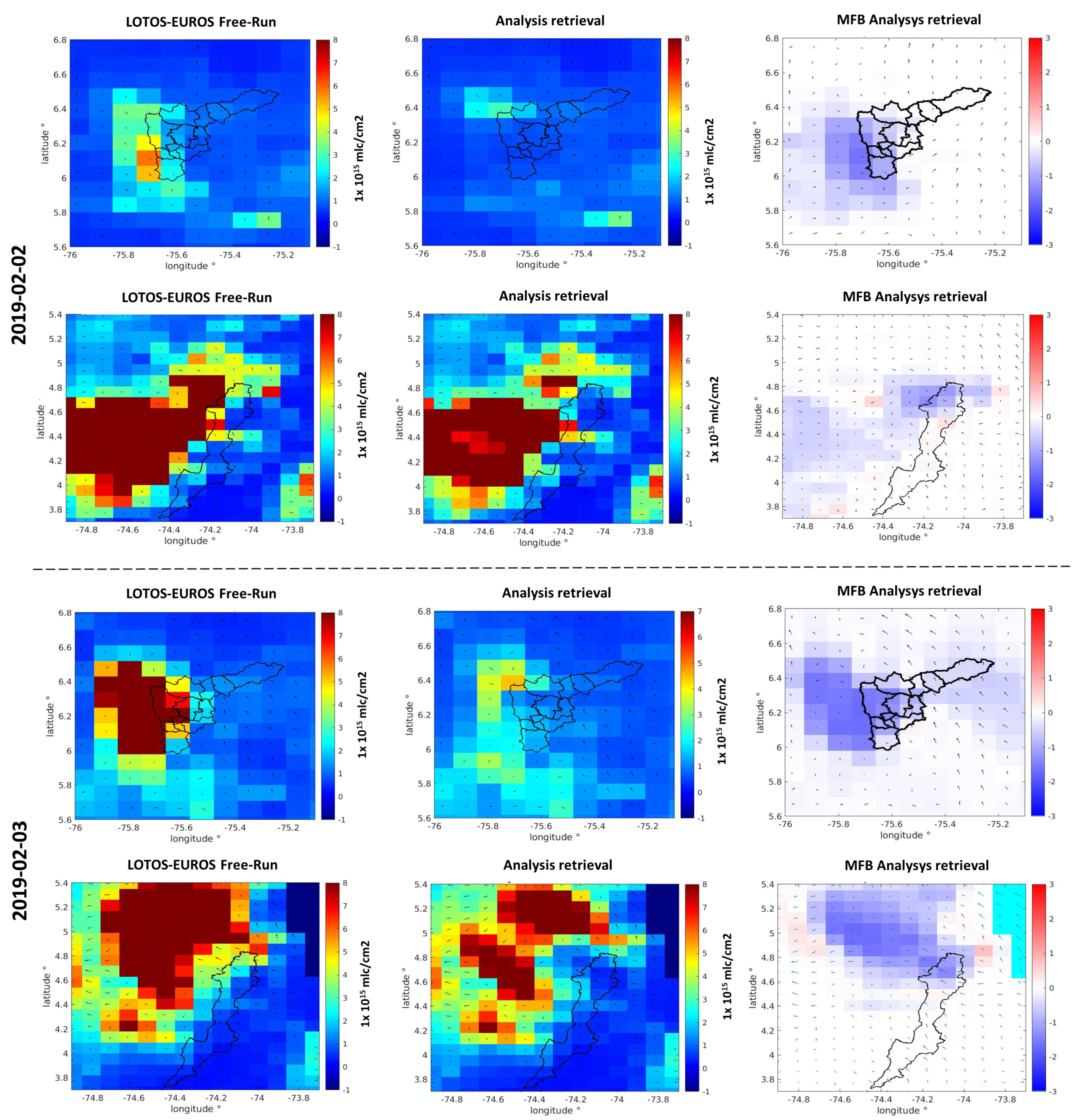
4.3.1. Simulated NO Columns
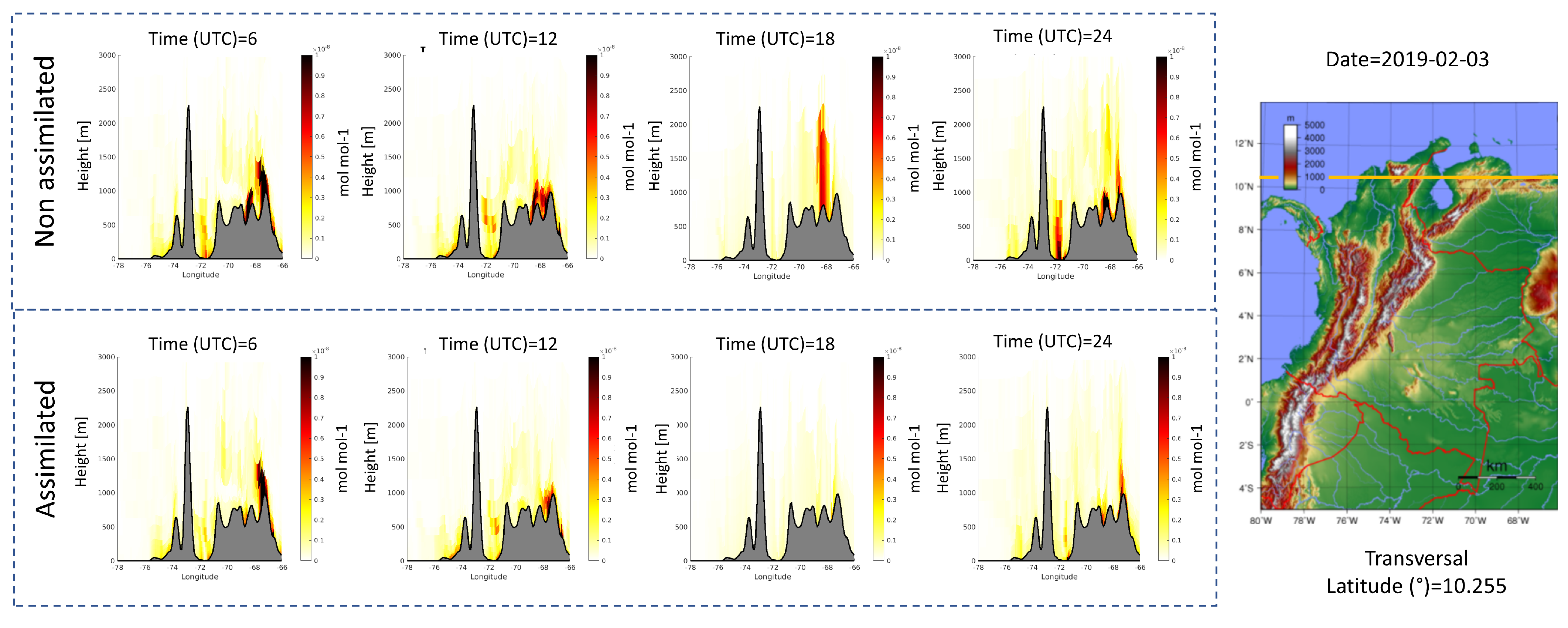
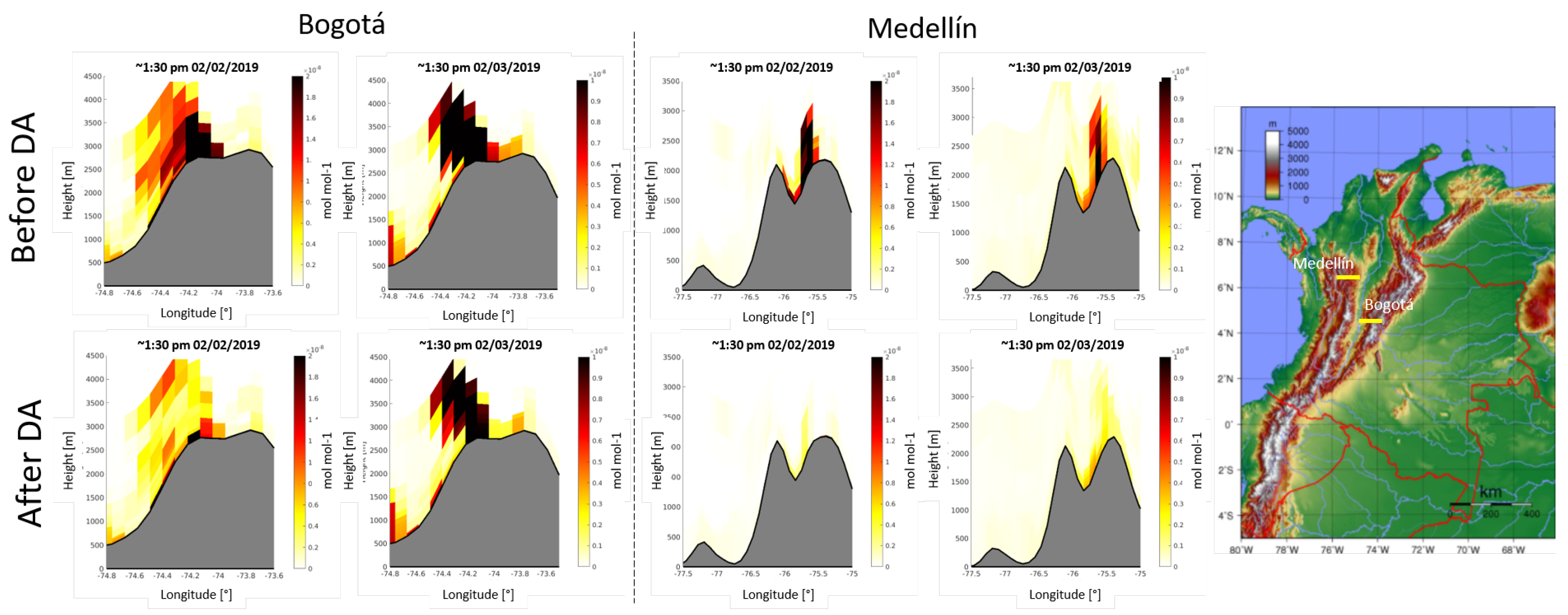
4.3.2. Vertical Profiles
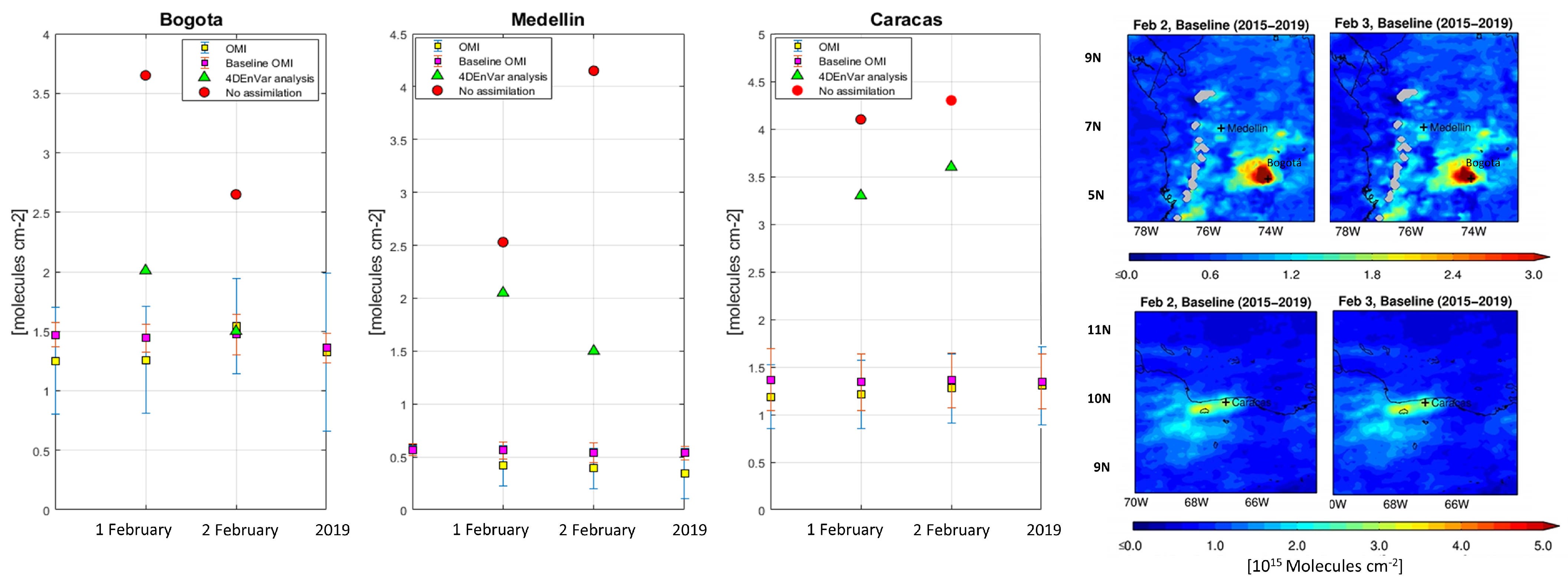
4.3.3. Impact over Major Cities
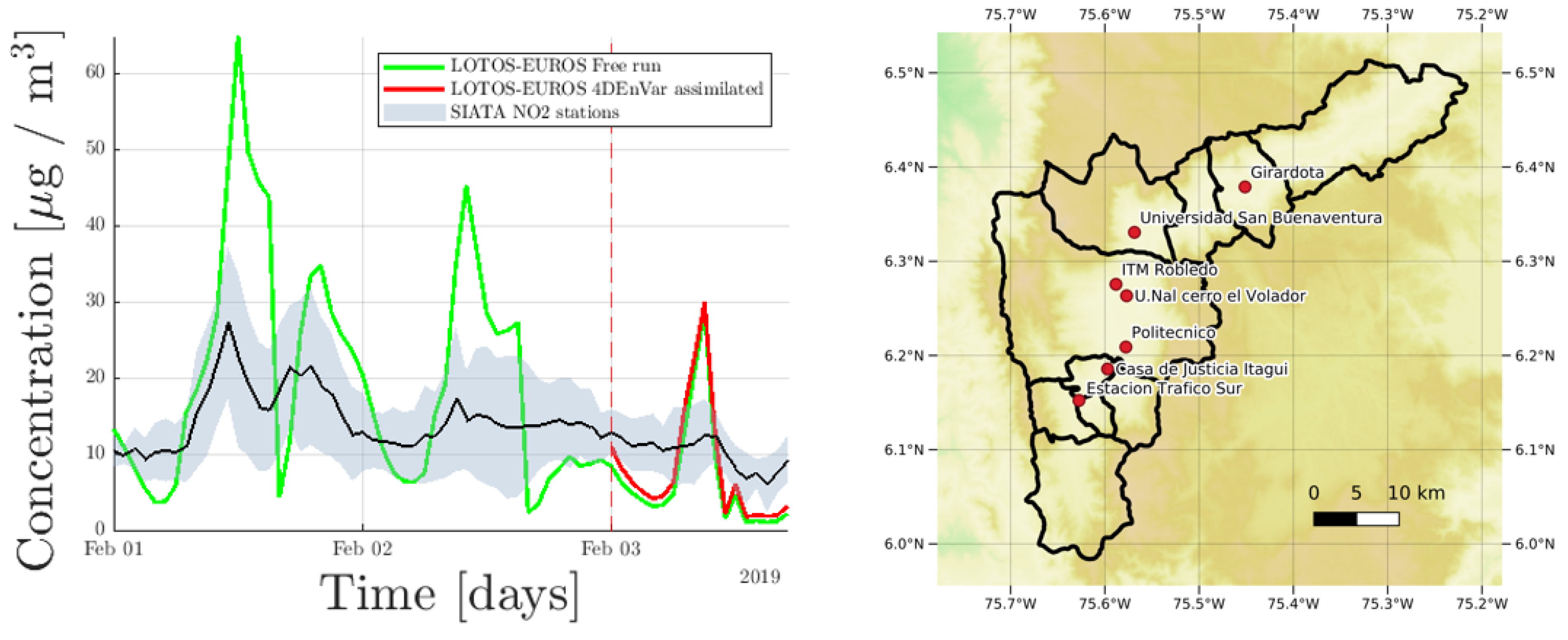
4.4. Comparison with SIATA Surface Observations and OMI Measurements
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Performance Metrics
References
- Carrassi, A.; Bocquet, M.; Bertino, L.; Evensen, G. Data assimilation in the geosciences: An overview of methods, issues, and perspectives. Wiley Interdiscip. Rev. Clim. Chang. 2018, 9, e535. [Google Scholar] [CrossRef] [Green Version]
- Sandu, A.; Constantinescu, E.M.; Liao, W.; Carmichael, G.R.; Chai, T.; Seinfeld, J.H.; Dăescu, D. Ensemble–Based data assimilation for atmospheric chemical transport models. In Proceedings of the International Conference on Computational Science, Singapore, 9–12 May 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 648–655. [Google Scholar]
- Aleksankina, K.; Reis, S.; Vieno, M.; Heal, M.R. Advanced methods for uncertainty assessment and global sensitivity analysis of an Eulerian atmospheric chemistry transport model. Atmos. Chem. Phys. 2019, 19, 2881–2898. [Google Scholar] [CrossRef] [Green Version]
- Aleksankina, K.; Heal, M.R.; Dore, A.J.; Oijen, M.V.; Reis, S. Global sensitivity and uncertainty analysis of an atmospheric chemistry transport model: The FRAME model (version 9.15. 0) as a case study. Geosci. Model Dev. 2018, 11, 1653–1664. [Google Scholar] [CrossRef] [Green Version]
- Mallet, V.; Sportisse, B. Uncertainty in a chemistry-transport model due to physical parameterizations and numerical approximations: An ensemble approach applied to ozone modeling. J. Geophys. Res. Atmos. 2006, 111, 118751. [Google Scholar] [CrossRef]
- Guevara, M.; Lopez-Aparicio, S.; Cuvelier, C.; Tarrason, L.; Clappier, A.; Thunis, P. A benchmarking tool to screen and compare bottom-up and top-down atmospheric emission inventories. Air Qual. Atmos. Health 2017, 10, 627–642. [Google Scholar] [CrossRef] [Green Version]
- Pachón, J.E.; Galvis, B.; Lombana, O.; Carmona, L.G.; Fajardo, S.; Rincón, A.; Meneses, S.; Chaparro, R.; Nedbor-Gross, R.; Henderson, B. Development and evaluation of a comprehensive atmospheric emission inventory for air quality modeling in the megacity of Bogotá. Atmosphere 2018, 9, 49. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; van der A, R.J.; Eskes, H.; Ding, J.; Mijling, B. Evaluation of modeling NO2 concentrations driven by satellite-derived and bottom-up emission inventories using in situ measurements over China. Atmos. Chem. Phys. 2018, 18, 4171–4186. [Google Scholar] [CrossRef] [Green Version]
- Kuenen, J.; Visschedijk, A.; Jozwicka, M.; Denier Van Der Gon, H. TNO-MACC_II emission inventory; a multi-year (2003–2009) consistent high-resolution European emission inventory for air quality modelling. Atmos. Chem. Phys. 2014, 14, 10963–10976. [Google Scholar] [CrossRef] [Green Version]
- Guevara, M.; Jorba, O.; Tena, C.; Denier van der Gon, H.; Kuenen, J.; Elguindi, N.; Darras, S.; Granier, C.; Pérez García-Pando, C. Copernicus Atmosphere Monitoring Service TEMPOral profiles (CAMS-TEMPO): Global and European emission temporal profile maps for atmospheric chemistry modelling. Earth Syst. Sci. Data 2021, 13, 367–404. [Google Scholar] [CrossRef]
- Timmermans, R.; Kranenburg, R.; Manders, A.; Hendriks, C.; Segers, A.; Dammers, E.; Zhang, Q.; Wang, L.; Liu, Z.; Zeng, L.; et al. Source apportionment of PM2. 5 across China using LOTOS-EUROS. Atmos. Environ. 2017, 164, 370–386. [Google Scholar] [CrossRef]
- Thürkow, M.; Kirchner, I.; Kranenburg, R.; Timmermans, R.; Schaap, M. A multi-meteorological comparison for episodes of PM10 concentrations in the Berlin agglomeration area in Germany with the LOTOS-EUROS CTM. Atmos. Environ. 2021, 244, 117946. [Google Scholar] [CrossRef]
- Schaap, M.; Timmermans, R.M.; Roemer, M.; Boersen, G.; Builtjes, P.; Sauter, F.; Velders, G.; Beck, J. The LOTOS? EUROS model: Description, validation and latest developments. Int. J. Environ. Pollut. 2008, 32, 270–290. [Google Scholar] [CrossRef]
- Manders, A.M.; Builtjes, P.J.; Curier, L.; Denier van der Gon, H.A.; Hendriks, C.; Jonkers, S.; Kranenburg, R.; Kuenen, J.J.; Segers, A.J.; Timmermans, R.; et al. Curriculum vitae of the LOTOS–EUROS (v2. 0) chemistry transport model. Geosci. Model Dev. 2017, 10, 4145–4173. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Restrepo, S.; Yarce, A.; Pinel, N.; Quintero, O.; Segers, A.; Heemink, A. Forecasting PM10 and PM2.5 in the Aburrá Valley (Medellín, Colombia) via EnKF based data assimilation. Atmos. Environ. 2020, 232, 117507. [Google Scholar] [CrossRef]
- Casallas, A.; Celis, N.; Ferro, C.; Barrera, E.L.; Peña, C.; Corredor, J.; Segura, M.B. Validation of PM10 and PM2.5 early alert in Bogotá, Colombia, through the modeling software WRF-CHEM. Environ. Sci. Pollut. Res. 2020, 27, 35930–35940. [Google Scholar] [CrossRef] [PubMed]
- Henao, J.J.; Mejía, J.F.; Rendón, A.M.; Salazar, J.F. Sub-kilometer dispersion simulation of a CO tracer for an inter-Andean urban valley. Atmos. Pollut. Res. 2020, 11, 928–945. [Google Scholar] [CrossRef]
- Barten, J.G.M.; Ganzeveld, L.N.; Visser, A.J.; Jiménez, R.; Krol, M.C. Evaluation of nitrogen oxides sources and sinks and ozone production in Colombia and surrounding areas. Atmos. Chem. Phys. Discuss. 2019, 2019, 1–30. [Google Scholar] [CrossRef]
- Grajales, J.F.; Baquero-Bernal, A. Inference of surface concentrations of nitrogen dioxide (NO2) in Colombia from tropospheric columns of the ozone measurement instrument (OMI). Atmósfera 2014, 27, 193–214. [Google Scholar] [CrossRef] [Green Version]
- Quintero Montoya, O.L.; Niño-Ruiz, E.D.; Pinel, N. On the mathematical modelling and data assimilation for air pollution assessment in the Tropical Andes. Environ. Sci. Pollut. Res. 2020, 27, 35993–36012. [Google Scholar] [CrossRef] [PubMed]
- Bocquet, M.; Elbern, H.; Eskes, H.; Hirtl, M.; Žabkar, R.; Carmichael, G.; Flemming, J.; Inness, A.; Pagowski, M.; Pérez Camaño, J.; et al. Data assimilation in atmospheric chemistry models: Current status and future prospects for coupled chemistry meteorology models. Atmos. Chem. Phys. 2015, 15, 5325–5358. [Google Scholar] [CrossRef] [Green Version]
- Constantinescu, E.M.; Sandu, A.; Chai, T.; Carmichael, G.R. Ensemble-based chemical data assimilation. I: General approach. Q. J. R. Meteorol. Soc. A J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2007, 133, 1229–1243. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L.; Pellerin, G.; Buehner, M.; Charron, M.; Spacek, L.; Hansen, B. Atmospheric data assimilation with an ensemble Kalman filter: Results with real observations. Mon. Weather Rev. 2005, 133, 604–620. [Google Scholar] [CrossRef] [Green Version]
- Houtekamer, P.L.; Zhang, F. Review of the ensemble Kalman filter for atmospheric data assimilation. Mon. Weather Rev. 2016, 144, 4489–4532. [Google Scholar] [CrossRef]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Lorenc, A.C.; Jardak, M. A comparison of hybrid variational data assimilation methods for global NWP. Q. J. R. Meteorol. Soc. 2018, 144, 2748–2760. [Google Scholar] [CrossRef]
- Emili, E.; Gürol, S.; Cariolle, D. Accounting for model error in air quality forecasts: An application of 4DEnVar to the assimilation of atmospheric composition using QG-Chem 1.0. Geosci. Model Dev. 2016, 9, 3933. [Google Scholar] [CrossRef] [Green Version]
- Curier, R.; Timmermans, R.; Calabretta-Jongen, S.; Eskes, H.; Segers, A.; Swart, D.; Schaap, M. Improving ozone forecasts over Europe by synergistic use of the LOTOS-EUROS chemical transport model and in-situ measurements. Atmos. Environ. 2012, 60, 217–226. [Google Scholar] [CrossRef]
- Eskes, H.; Curier, L.; Segers, A. Assimilation of surface and satellite observations with the Lotos-Euros air quality model and the ensemble Kalman filter technique. In Proceedings of the EGU General Assembly 2012, Vienna, Austria, 22–27 April 2012; p. 12805. [Google Scholar]
- Barbu, A.; Segers, A.; Schaap, M.; Heemink, A.; Builtjes, P. A multi-component data assimilation experiment directed to sulphur dioxide and sulphate over Europe. Atmos. Environ. 2009, 43, 1622–1631. [Google Scholar] [CrossRef]
- Pinel, N.; Salazar, J.; Jose, P.; Rendon, A.; Quintero, O.; Yarce, A. Potential urban pollution impacts on protected areas in Colombia through atmospheric teleconnections. In Proceedings of the CMAS Community Modeling and Analysis system, Chapel Hill, NC, USA, 23–25 October 2017; pp. 3–5. [Google Scholar]
- Fu, G.; Heemink, A.; Lu, S.; Segers, A.; Weber, K.; Lin, H.X. Model-based aviation advice on distal volcanic ash clouds by assimilating aircraft in situ measurements. Atmos. Chem. Phys. 2016, 16, 9189–9200. [Google Scholar] [CrossRef] [Green Version]
- Lu, S.; Lin, H.; Heemink, A.; Fu, G.; Segers, A. Estimation of volcanic ash emissions using trajectory-based 4D-Var data assimilation. Mon. Weather Rev. 2016, 144, 575–589. [Google Scholar] [CrossRef] [Green Version]
- Jin, J.; Lin, H.X.; Heemink, A.; Segers, A. Spatially varying parameter estimation for dust emissions using reduced-tangent-linearization 4DVar. Atmos. Environ. 2018, 187, 358–373. [Google Scholar] [CrossRef]
- Liu, C.; Xiao, Q.; Wang, B. An ensemble-based four-dimensional variational data assimilation scheme. Part I: Technical formulation and preliminary test. Mon. Weather Rev. 2008, 136, 3363–3373. [Google Scholar] [CrossRef] [Green Version]
- Bannister, R. A review of operational methods of variational and ensemble-variational data assimilation. Q. J. R. Meteorol. Soc. 2017, 143, 607–633. [Google Scholar] [CrossRef] [Green Version]
- Burrows, J.P.; Weber, M.; Buchwitz, M.; Rozanov, V.; Ladstätter-Weißenmayer, A.; Richter, A.; DeBeek, R.; Hoogen, R.; Bramstedt, K.; Eichmann, K.U.; et al. The global ozone monitoring experiment (GOME): Mission concept and first scientific results. J. Atmos. Sci. 1999, 56, 151–175. [Google Scholar] [CrossRef]
- Flynn, L.; Long, C.; Wu, X.; Evans, R.; Beck, C.; Petropavlovskikh, I.; McConville, G.; Yu, W.; Zhang, Z.; Niu, J.; et al. Performance of the ozone mapping and profiler suite (OMPS) products. J. Geophys. Res. Atmos. 2014, 119, 6181–6195. [Google Scholar] [CrossRef]
- Bovensmann, H.; Burrows, J.; Buchwitz, M.; Frerick, J.; Noël, S.; Rozanov, V.; Chance, K.; Goede, A. SCIAMACHY: Mission objectives and measurement modes. J. Atmos. Sci. 1999, 56, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Levelt, P.F.; van den Oord, G.H.; Dobber, M.R.; Malkki, A.; Visser, H.; de Vries, J.; Stammes, P.; Lundell, J.O.; Saari, H. The ozone monitoring instrument. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1093–1101. [Google Scholar] [CrossRef]
- Veefkind, J.; Aben, I.; McMullan, K.; Förster, H.; De Vries, J.; Otter, G.; Claas, J.; Eskes, H.; De Haan, J.; Kleipool, Q.; et al. TROPOMI on the ESA Sentinel-5 Precursor: A GMES mission for global observations of the atmospheric composition for climate, air quality and ozone layer applications. Remote Sens. Environ. 2012, 120, 70–83. [Google Scholar] [CrossRef]
- Van Geffen, J.; Boersma, K.F.; Eskes, H.; Sneep, M.; Ter Linden, M.; Zara, M.; Veefkind, J.P. S5P TROPOMI NO2 slant column retrieval: Method, stability, uncertainties and comparisons with OMI. Atmos. Meas. Tech. 2020, 13, 1315–1335. [Google Scholar] [CrossRef] [Green Version]
- van der A, R.; de Laat, J.; Eskes, H.; Ding, J. Connecting the dots: NOx emissions along a West Siberian natural gas pipeline. In Proceedings of the EGU General Assembly Conference Abstracts, Online, 4–8 May 2020; p. 7633. [Google Scholar]
- Inness, A.; Ades, M.; Agusti-Panareda, A.; Barré, J.; Benedictow, A.; Blechschmidt, A.M.; Dominguez, J.J.; Engelen, R.; Eskes, H.; Flemming, J.; et al. The CAMS reanalysis of atmospheric composition. Atmos. Chem. Phys. 2019, 19, 3515–3556. [Google Scholar] [CrossRef] [Green Version]
- Yarce, A.B.; Montoya, O.L.Q.; Lopez-Restrepo, S.; Pinel, N.; Hinestroza, J.E.; Niño-Ruiz, E.D.; Flórez, J.A.; Rendón, A.M.; Alvarez-Laínez, M.L.; Zapata-Gonzalez, A.H.; et al. Medellin Air Quality Initiative (MAUI); Intechopen: London, UK, 2021. [Google Scholar]
- Van Zanten, M.; Sauter, F.; RJ, W.K.; Van Jaarsveld, J.; Van Pul, W. Description of the DEPAC Module: Dry Deposition Modelling with DEPAC_GCN2010; RIVM rapport 680180001; Rijksinstituut voor Volksgezondheid en Milieu RIVM: Utrecht, The Netherlands, 2010.
- van Geffen, J.H.G.M.; Eskes, H.J.; Boersma, K.B.; Veefkind, J. TROPOMI ATBD of the Total and Tropospheric NO2 Data Products; Report S5P-KNMI-L2-0005-RP; Royal Netherlands Meteorological Institute (KNMI): De Bilt, The Netherlands, 2021. [Google Scholar]
- Eskes, H.; Boersma, K. Averaging kernels for DOAS total-column satellite retrievals. Atmos. Chem. Phys. 2003, 3, 1285–1291. [Google Scholar] [CrossRef] [Green Version]
- Skoulidou, I.; Koukouli, M.E.; Segers, A.; Manders, A.; Balis, D.; Stavrakou, T.; van Geffen, J.; Eskes, H. Changes in Power Plant NOx Emissions over Northwest Greece Using a Data Assimilation Technique. Atmosphere 2021, 12, 900. [Google Scholar] [CrossRef]
- Wang, C.; Wang, T.; Wang, P.; Rakitin, V. Comparison and Validation of TROPOMI and OMI NO2 Observations over China. Atmosphere 2020, 11, 636. [Google Scholar] [CrossRef]
- Skamarock, W.; Klemp, J.; Dudhia, J.; Gill, D.; Liu, Z.; Berner, J.; Wang, W.; Powers, J.; Duda, M.; Barker, D.; et al. A Description of the Advanced Research WRF Model Version 4 (No. NCAR/TN-556+ STR); National Center for Atmospheric Research: Boulder, CO, USA, 2019. [Google Scholar]
- Kurokawa, J.I.; Yumimoto, K.; Uno, I.; Ohara, T. Adjoint inverse modeling of NOx emissions over eastern China using satellite observations of NO2 vertical column densities. Atmos. Environ. 2009, 43, 1878–1887. [Google Scholar] [CrossRef]
- Chai, T.; Carmichael, G.R.; Tang, Y.; Sandu, A.; Heckel, A.; Richter, A.; Burrows, J.P. Regional NOx emission inversion through a four-dimensional variational approach using SCIAMACHY tropospheric NO2 column observations. Atmos. Environ. 2009, 43, 5046–5055. [Google Scholar] [CrossRef]
- Zijlker, T. Estimating NOx Emissions Using S5-P TROPOMI: An Adjoint-Free 4DVAR Approach. Master’s Thesis, TuDelft University, Delft, The Netherlands, 2020. [Google Scholar]
- Wang, Y.; Wang, J.; Xu, X.; Henze, D.K.; Qu, Z.; Yang, K. Inverse modeling of SO2 and NOx emissions over China using multisensor satellite data—Part 1: Formulation and sensitivity analysis. Atmos. Chem. Phys. 2020, 20, 6631–6650. [Google Scholar] [CrossRef]
- Cooper, M.J.; Martin, R.V.; Henze, D.K.; Jones, D. Effects of a priori profile shape assumptions on comparisons between satellite NO2 columns and model simulations. Atmos. Chem. Phys. 2020, 20, 7231–7241. [Google Scholar] [CrossRef]
- Miyazaki, K.; Eskes, H.; Sudo, K. Global NOx emission estimates derived from an assimilation of OMI tropospheric NO2 columns. Atmos. Chem. Phys. 2012, 12, 2263–2288. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Wang, T.; Mizzi, A.P.; Anderson, J.L.; Zhuang, B.; Xie, M.; Wu, R. Multiconstituent data assimilation with WRF-Chem/DART: Potential for adjusting anthropogenic emissions and improving air quality forecasts over eastern China. J. Geophys. Res. Atmos. 2019, 124, 7393–7412. [Google Scholar] [CrossRef]
- Su, C.W.; Khan, K.; Tao, R.; Umar, M. A review of resource curse burden on inflation in Venezuela. Energy 2020, 204, 117925. [Google Scholar] [CrossRef]
- Inness, A.; Baier, F.; Benedetti, A.; Bouarar, I.; Chabrillat, S.; Clark, H.; Clerbaux, C.; Coheur, P.; Engelen, R.; Errera, Q.; et al. The MACC reanalysis: An 8 yr data set of atmospheric composition. Atmos. Chem. Phys. 2013, 13, 4073–4109. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Mallet, V.; Berroir, J.P.; Herlin, I. Assimilation of OMI NO2 retrievals into a regional chemistry-transport model for improving air quality forecasts over Europe. Atmos. Environ. 2011, 45, 485–492. [Google Scholar] [CrossRef]
- Boylan, J.W.; Russell, A.G. PM and light extinction model performance metrics, goals, and criteria for three-dimensional air quality models. Atmos. Environ. 2006, 40, 4946–4959. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE): Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Preliminary comparison periods | 16 January–1 February 2019 |
| Assimilation periods | 1–3 February 2019 |
| Metereology | ECMWF; Temp.res: 3 h; Spat.res: |
| Initial and boundary | LOTOS-EUROS (D1). Temp.res: 1 h. |
| conditions | Spat.Res: × |
| Anthropogenic emissions | EDGAR v4.3.2 Spat.res: 10 km × 10 km |
| Biogenic emissions | MEGAN Spat.res: 10 km × 10 km |
| Fire emissions | MACC/CAMS GFAS Spat.res: 10 km × 10 km |
| Landuse | CCLI. Spat.res: 1 km × 1 km |
| Topography | GMTED2010. Spat.res: 0.002× 0.002 |
| Domain 1 (D1) Lat × Lon | [−8.5, 18] × [−84, −60] |
| Domain Colombia (DCol) Lat × Lon | [−4.55, 13.27] × [−79.80, −65.94] |
| Observation SIATA as Reference | MFB | RMSE | Correlation |
|---|---|---|---|
| Free run | −0.4520 | 7.3050 | 0.5485 |
| Assimilation | −0.3226 | 7.0464 | 0.5864 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yarce Botero, A.; Lopez-Restrepo, S.; Pinel Peláez, N.; Quintero, O.L.; Segers, A.; Heemink, A.W. Estimating NOx LOTOS-EUROS CTM Emission Parameters over the Northwest of South America through 4DEnVar TROPOMI NO2 Assimilation. Atmosphere 2021, 12, 1633. https://doi.org/10.3390/atmos12121633
Yarce Botero A, Lopez-Restrepo S, Pinel Peláez N, Quintero OL, Segers A, Heemink AW. Estimating NOx LOTOS-EUROS CTM Emission Parameters over the Northwest of South America through 4DEnVar TROPOMI NO2 Assimilation. Atmosphere. 2021; 12(12):1633. https://doi.org/10.3390/atmos12121633
Chicago/Turabian StyleYarce Botero, Andrés, Santiago Lopez-Restrepo, Nicolás Pinel Peláez, Olga L. Quintero, Arjo Segers, and Arnold W. Heemink. 2021. "Estimating NOx LOTOS-EUROS CTM Emission Parameters over the Northwest of South America through 4DEnVar TROPOMI NO2 Assimilation" Atmosphere 12, no. 12: 1633. https://doi.org/10.3390/atmos12121633
APA StyleYarce Botero, A., Lopez-Restrepo, S., Pinel Peláez, N., Quintero, O. L., Segers, A., & Heemink, A. W. (2021). Estimating NOx LOTOS-EUROS CTM Emission Parameters over the Northwest of South America through 4DEnVar TROPOMI NO2 Assimilation. Atmosphere, 12(12), 1633. https://doi.org/10.3390/atmos12121633