Experimental Assessment of Dust Emissions on Compacted Soils Degraded by Traffic

 and
and
Abstract
1. Introduction
2. Convective Turbulent Dust Emission Model
2.1. Description of the Klose and Shao’s Model
2.2. Determination of the Model Input Parameters
2.2.1. Particle Size Distribution (PSD) and Quantity of Particles Subjected to Lift
2.2.2. Cohesive Forces
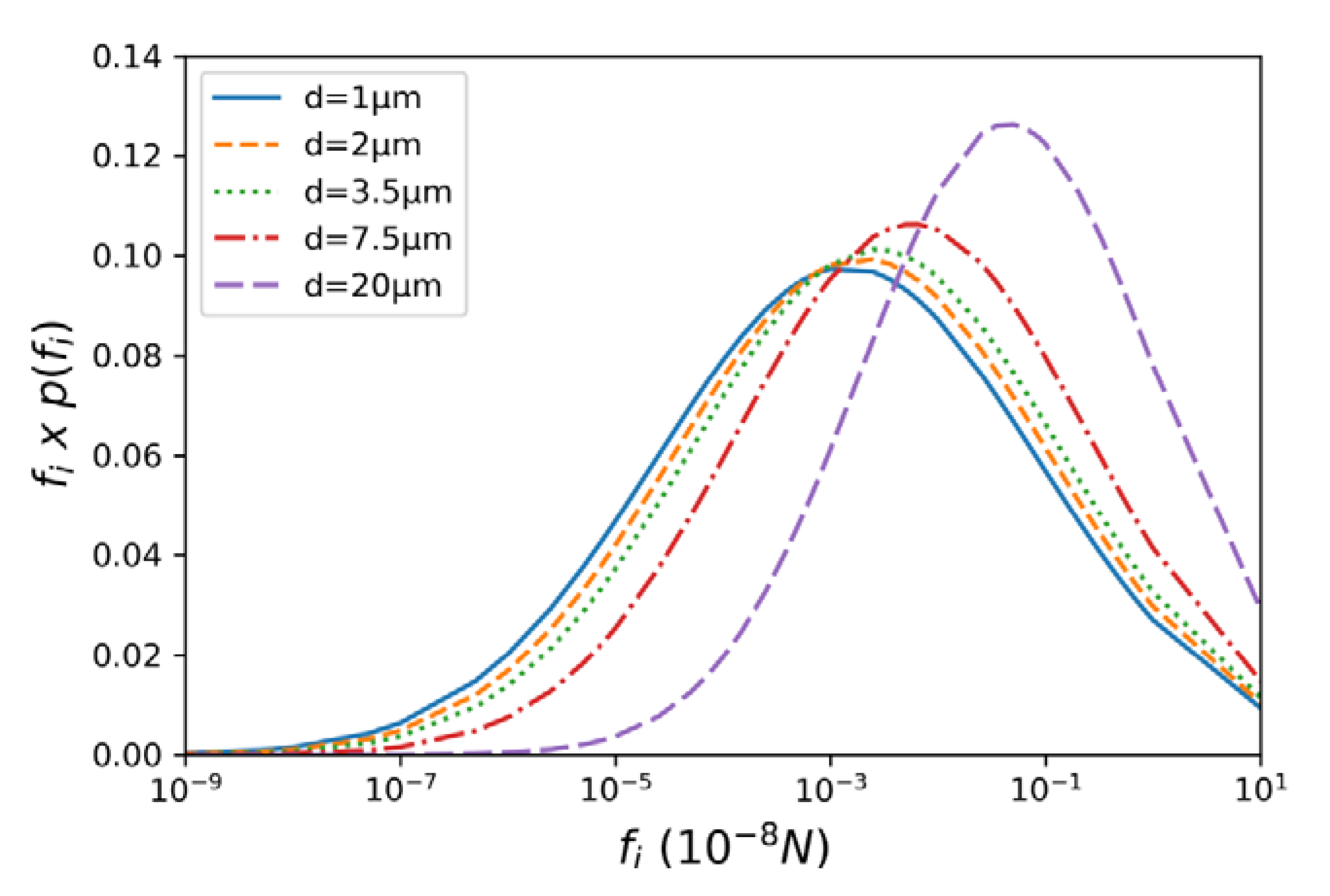
2.2.3. Lifting Forces
3. Experimental Facilities and Measurement Techniques
3.1. Compaction and Degradation of the Soil Samples
3.1.1. Compaction
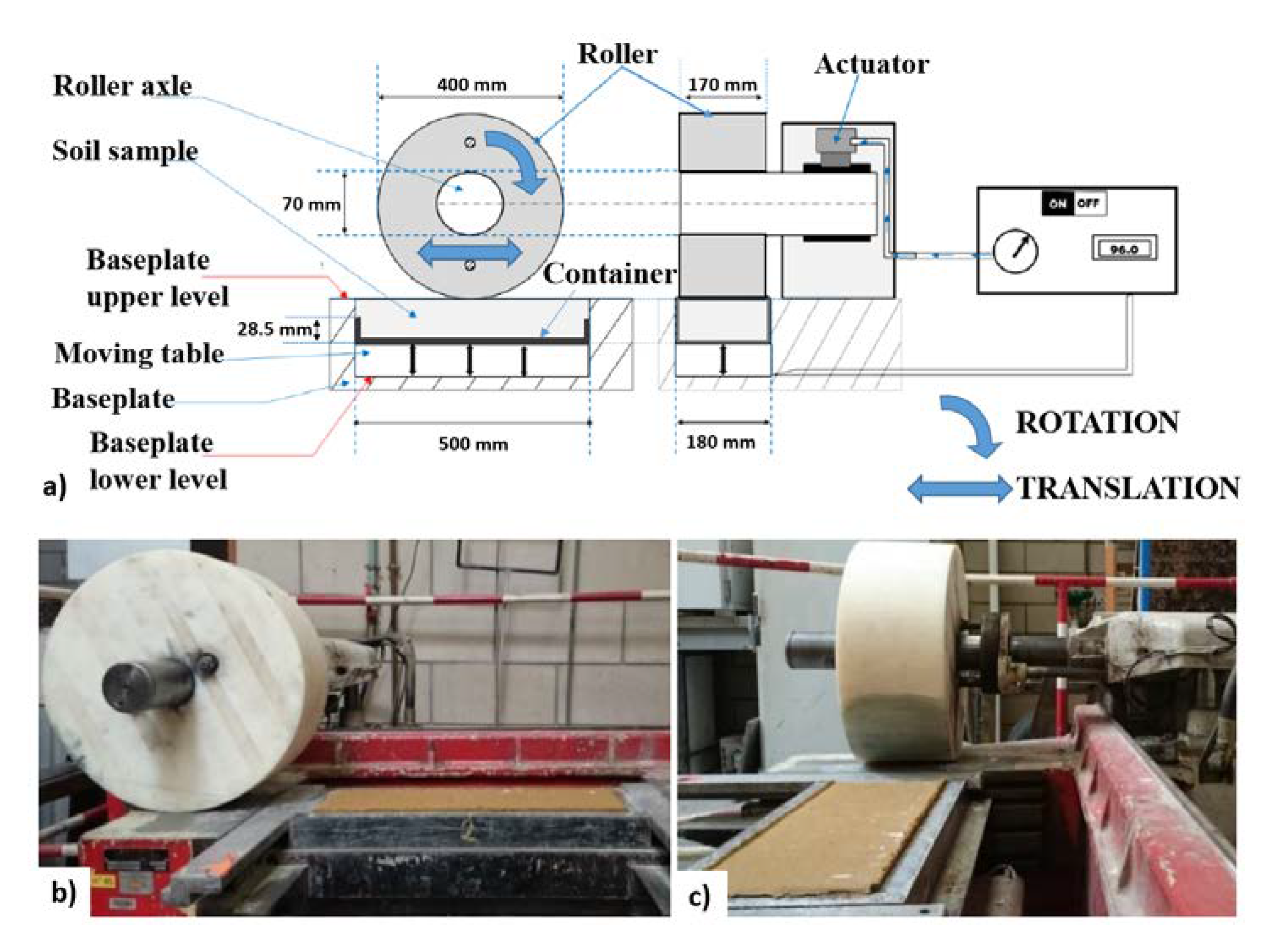
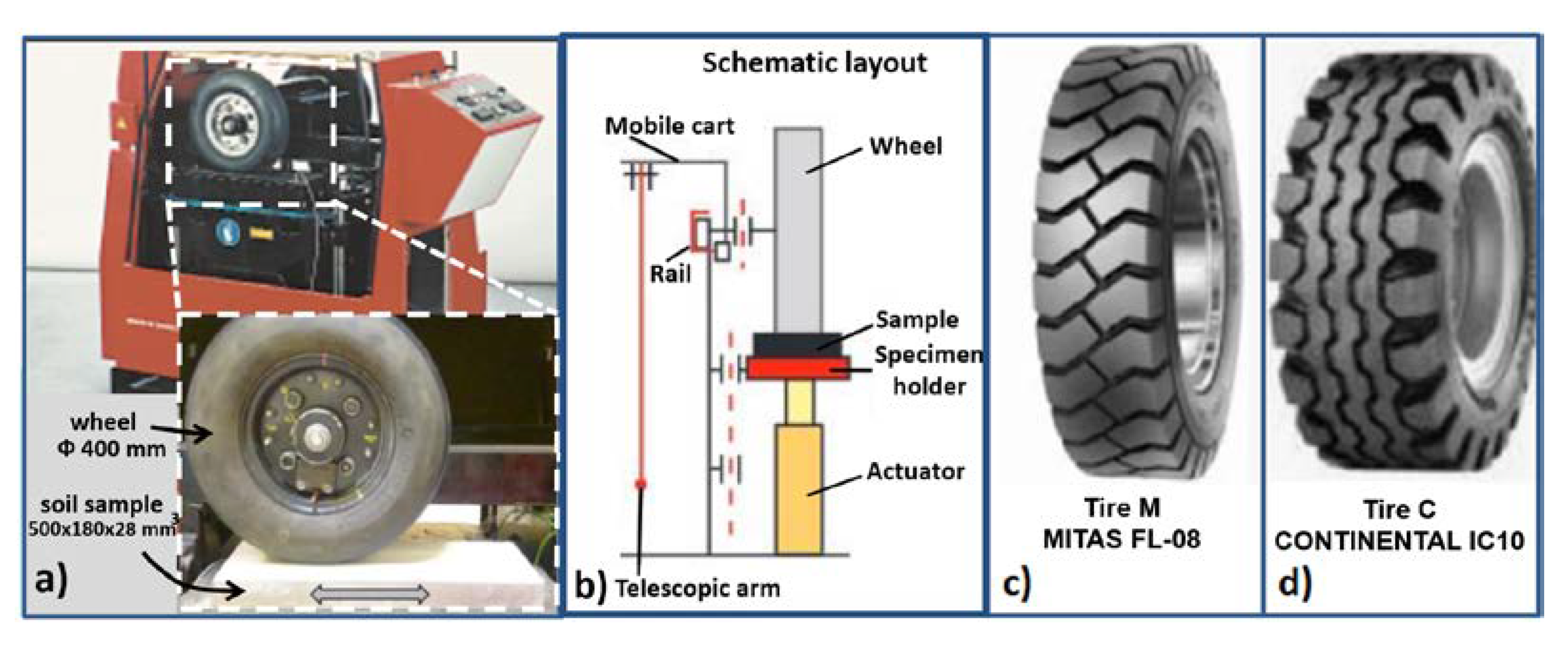
3.1.2. Soil Degradation by Traffic Simulation
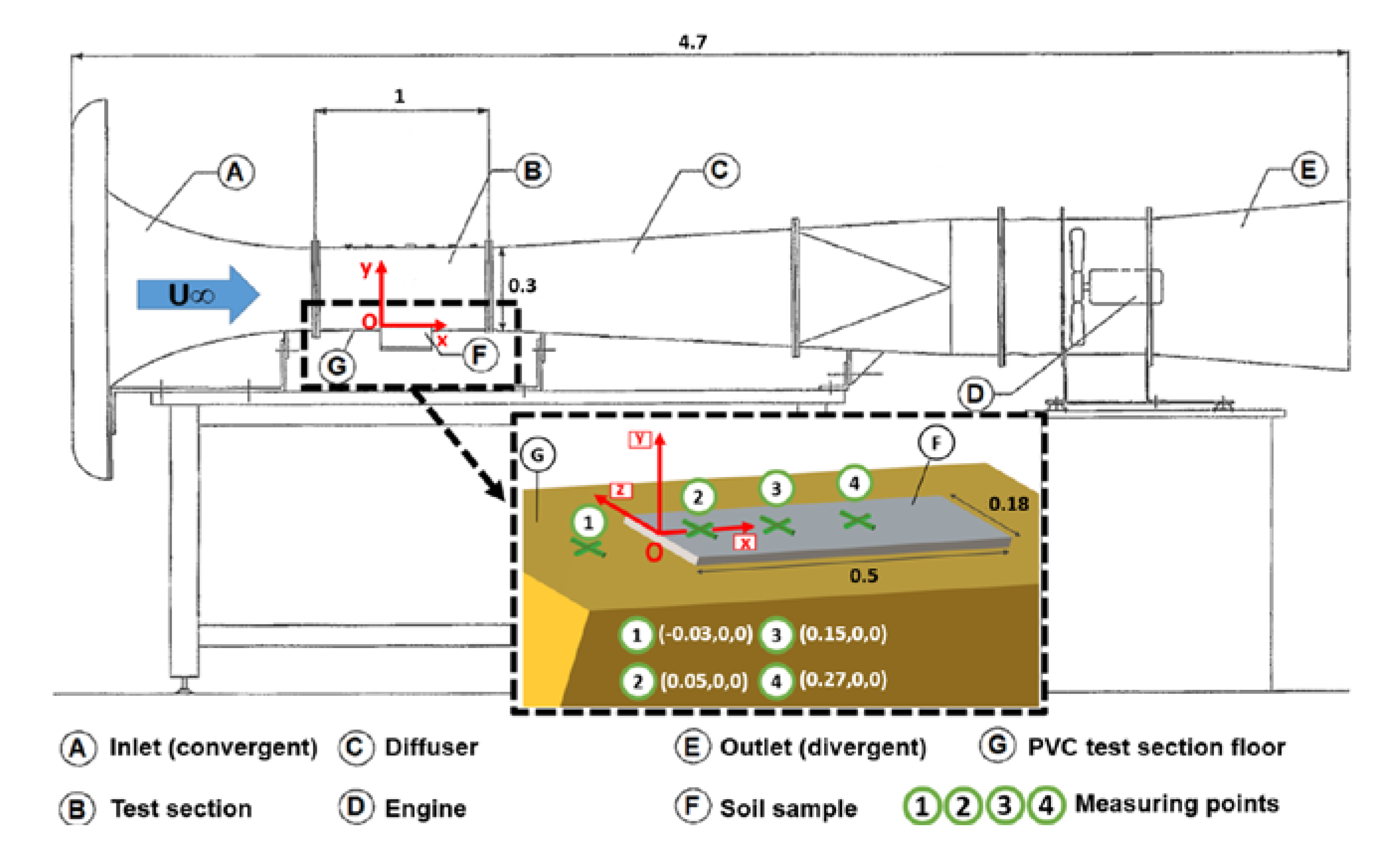
3.2. Soil-Atmosphere Interaction: Wind Tunnel Experiments
4. Results and Discussion
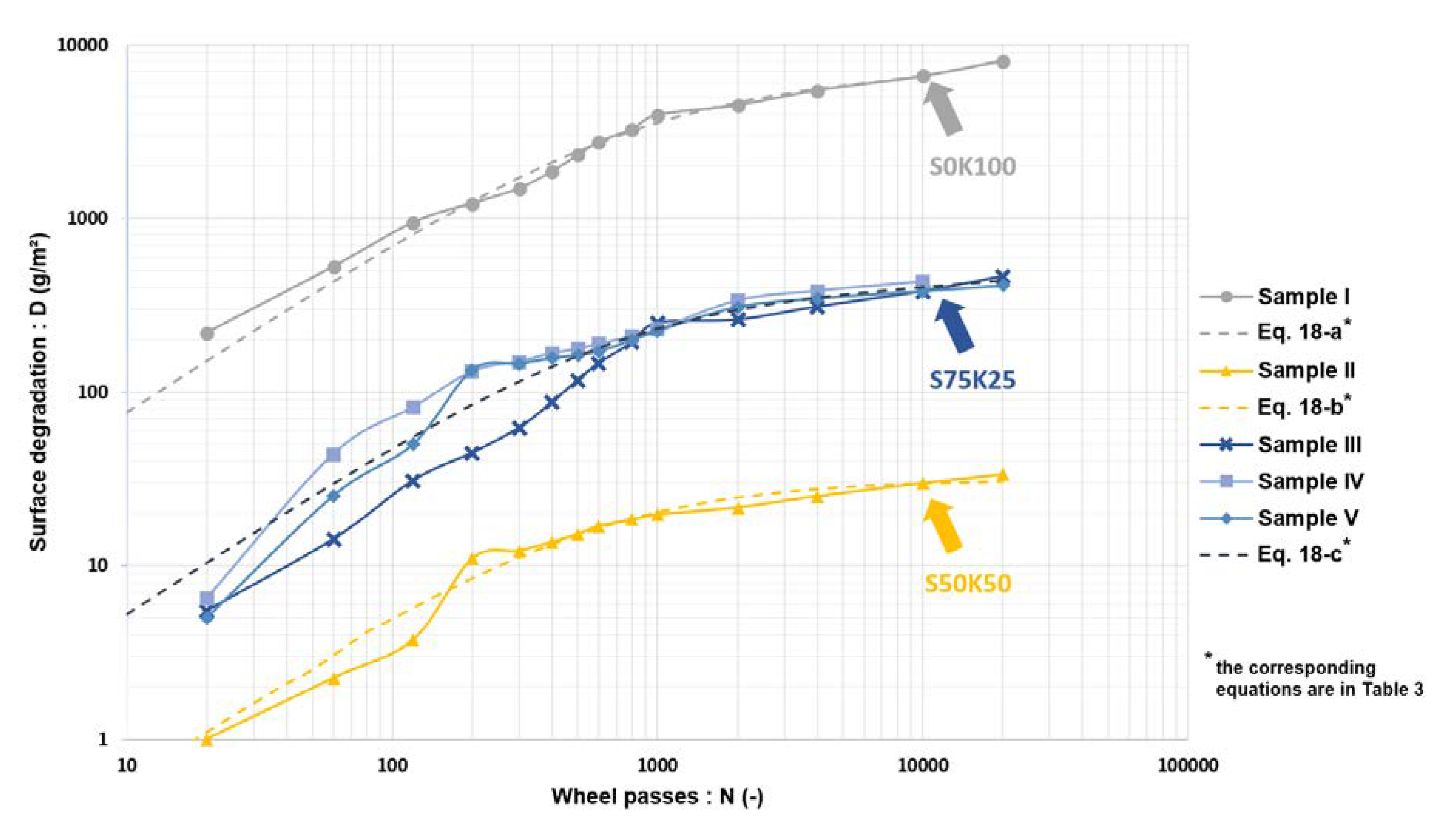
4.1. Soil Degradation by Traffic
4.1.1. Detachment of Particles from the Soil Surface
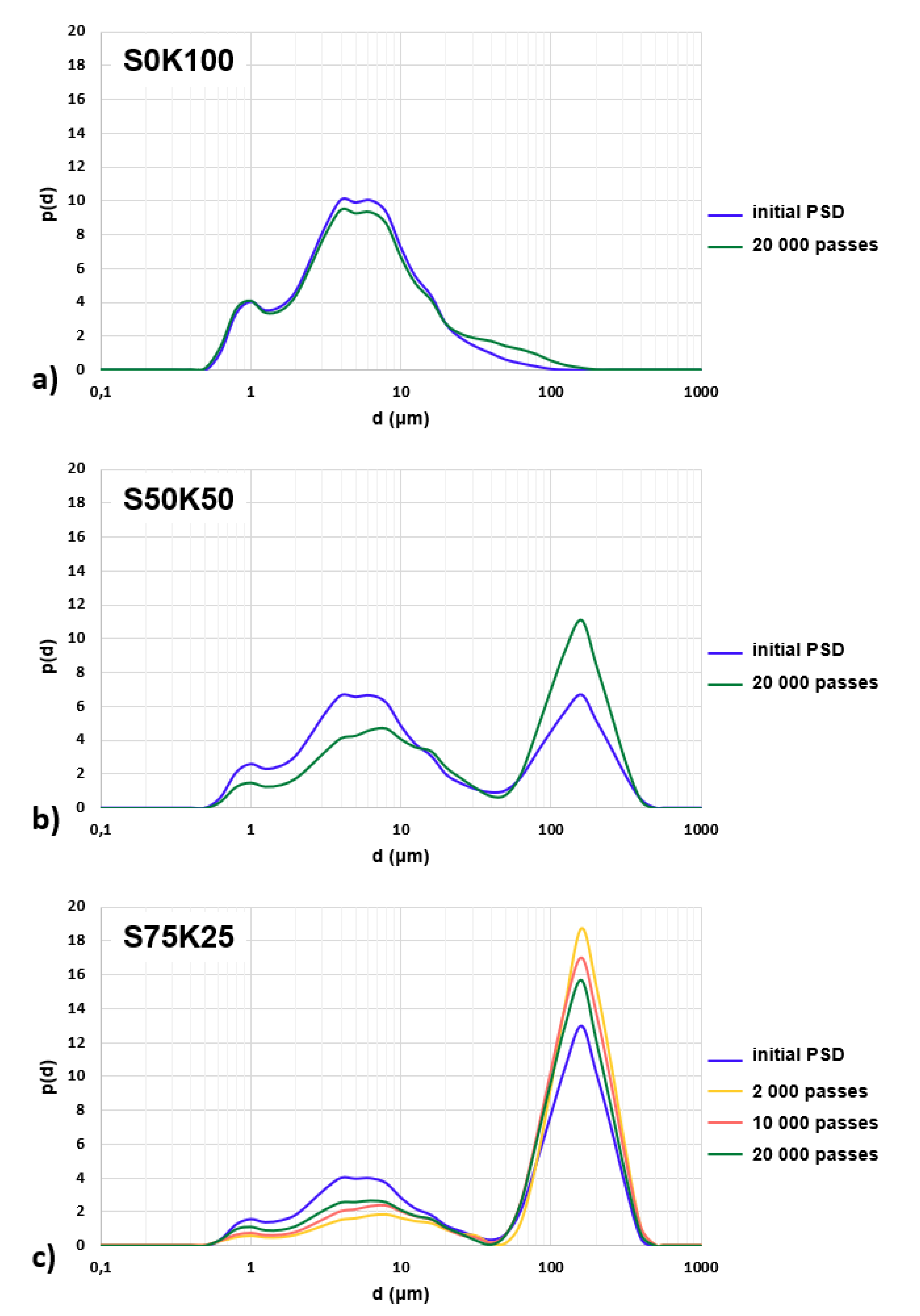
4.1.2. PSD of Particles Segregated from the Soils during Traffic Degradation
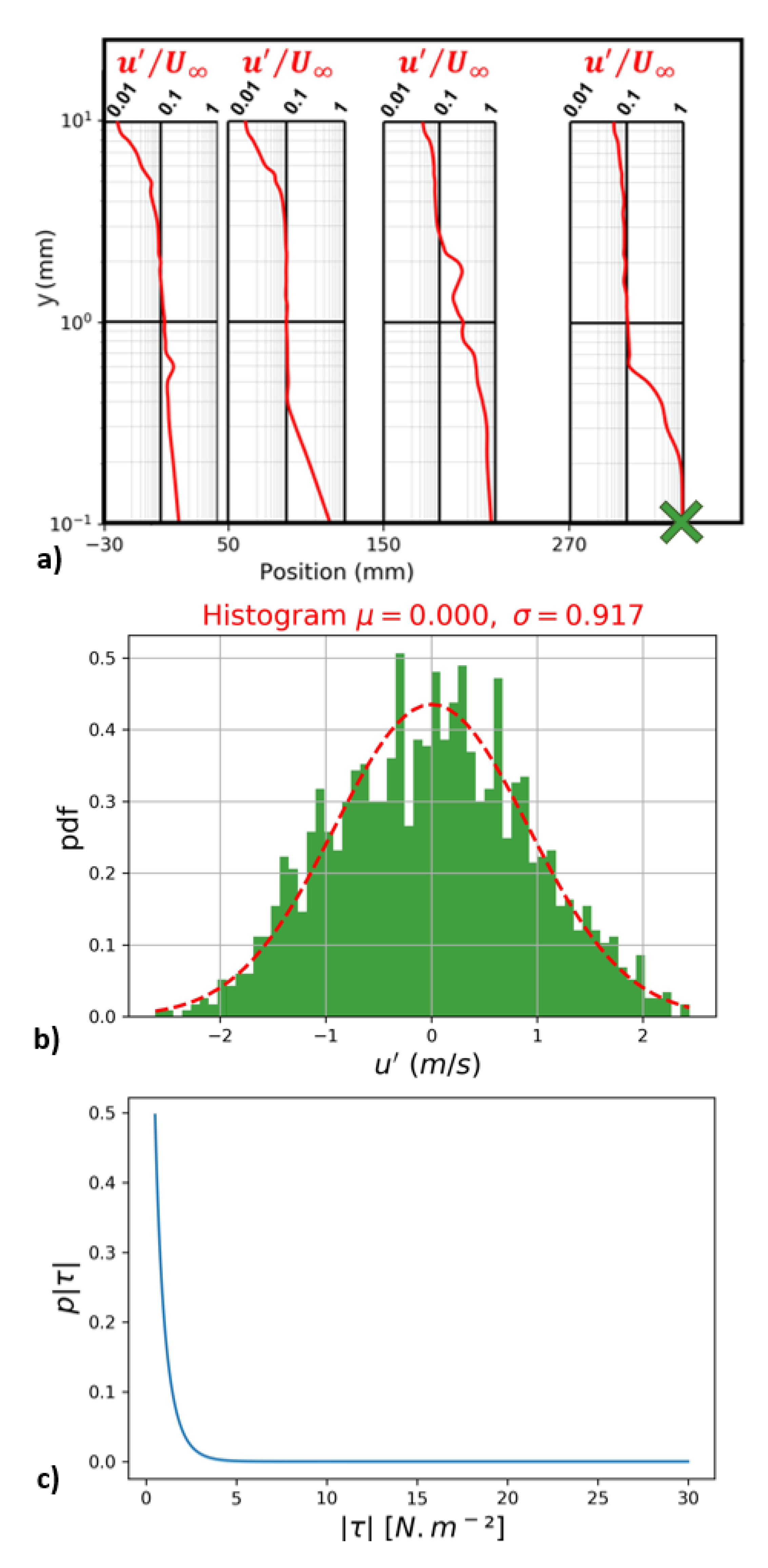
4.2. Boundary-Layer Characterization
4.3. Application of the CTDE Model
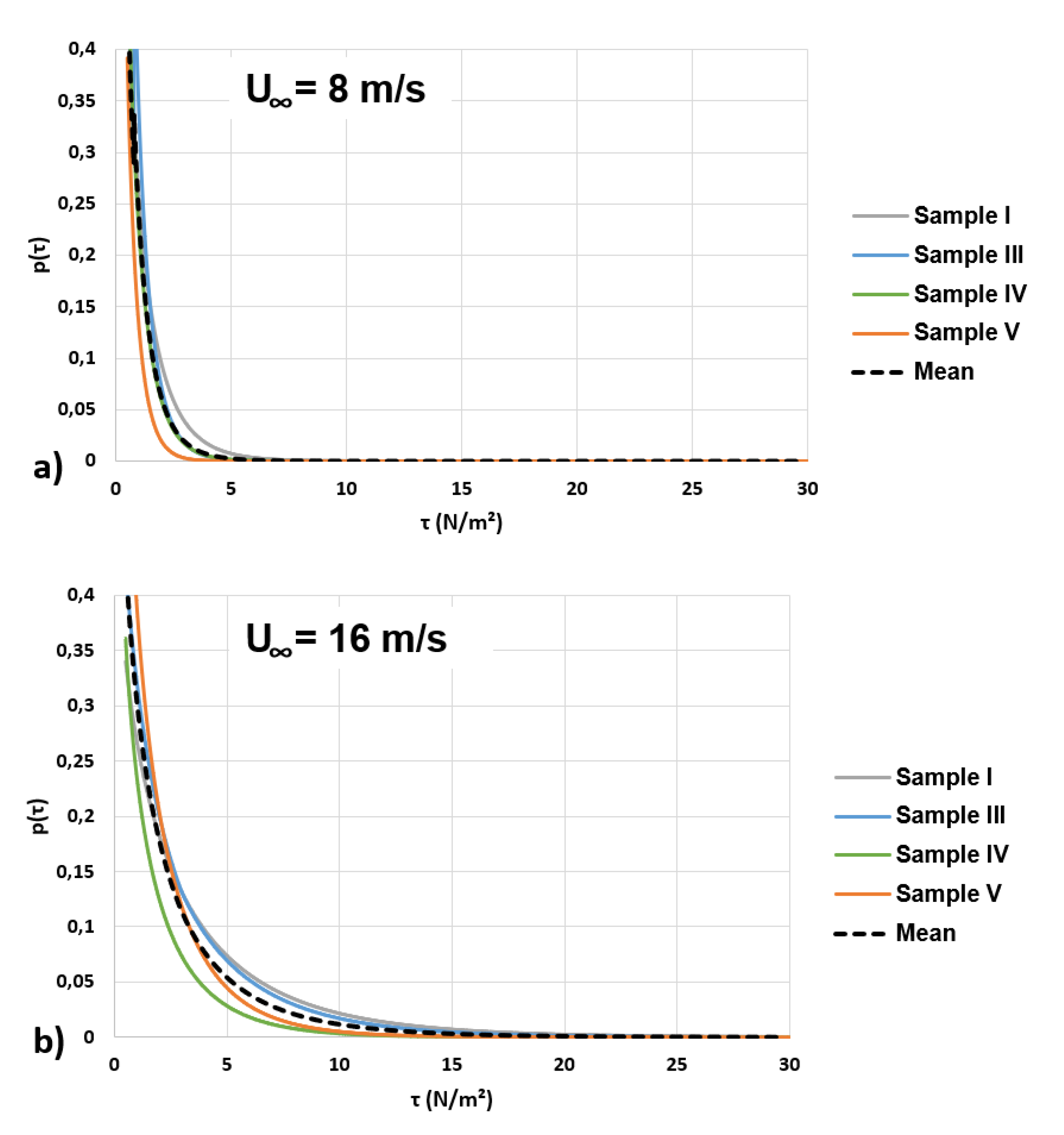
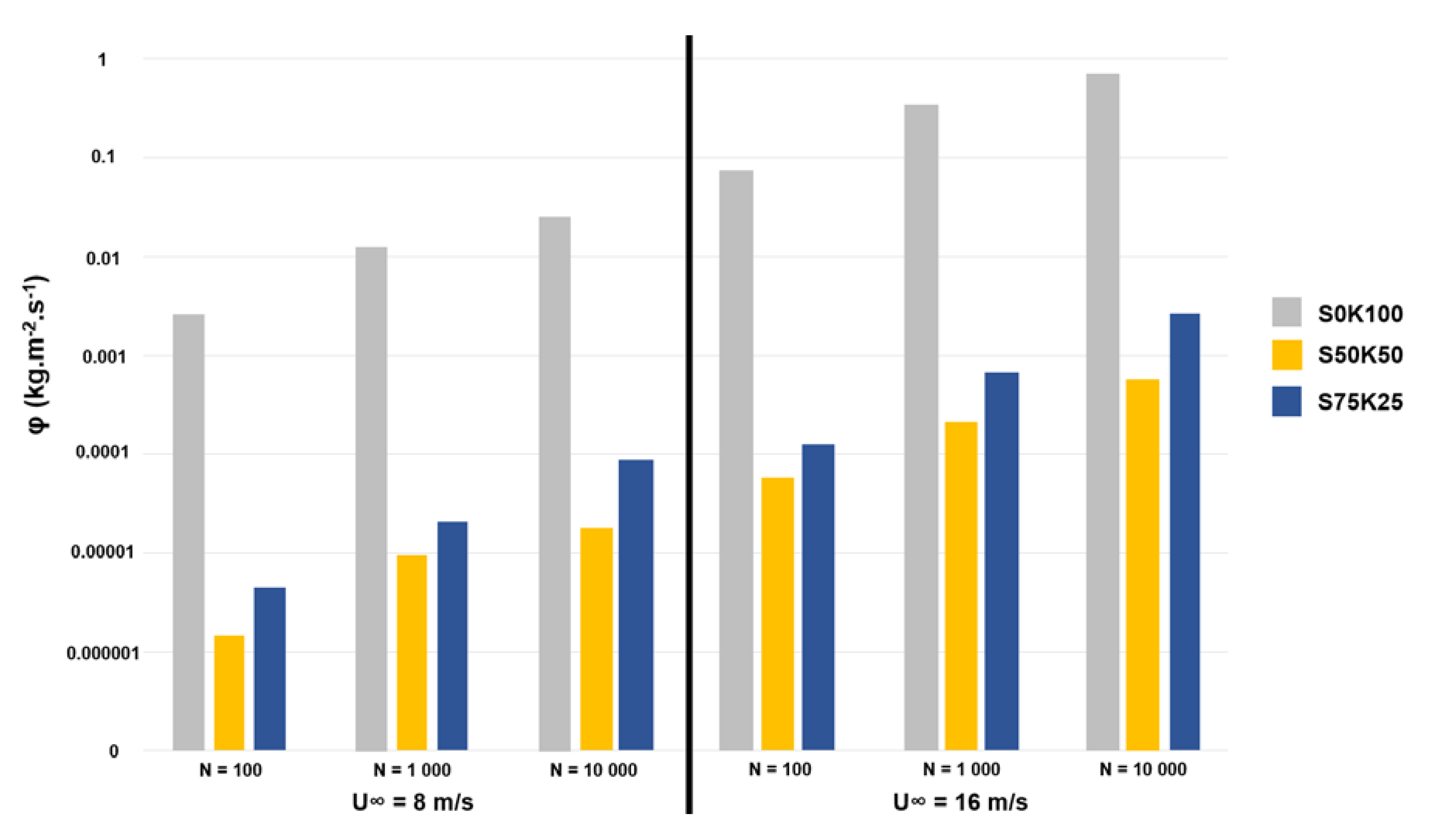
4.3.1. Estimation of Dust Emissions from Studied Soils
4.3.2. Comparison with Field Data
5. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
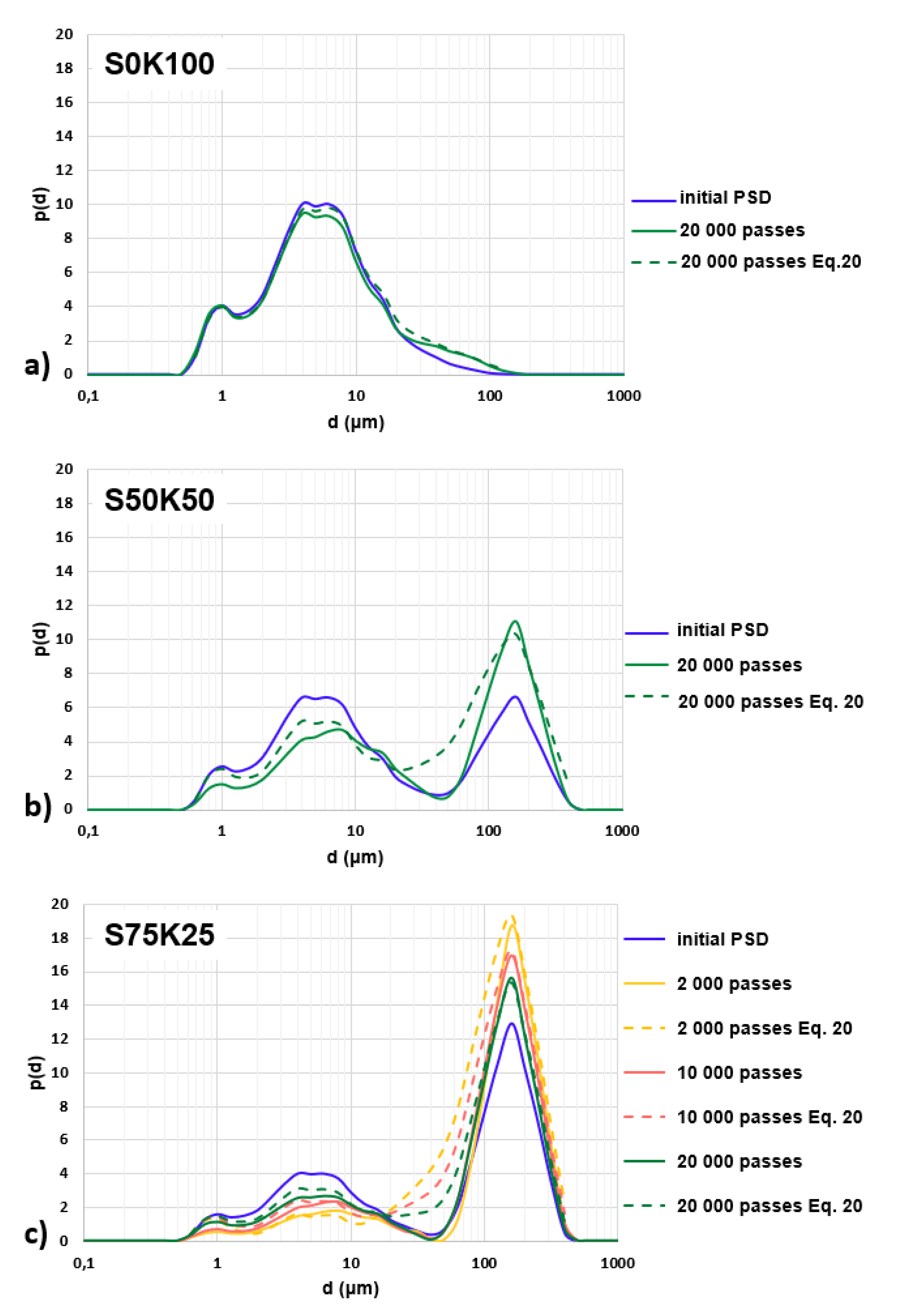
Appendix A. Model for the Determination of the PSD of Particles Detached from a Soil by Traffic

- A function was constructed allowing the description of the sinusoidal variation. This function looked like:where A is a function depending on the type of soil and the number of wheel passes.
- The scales in Figure A1 were semi-logarithmic, so the function took the following form:
- The curves in Figure A1 were defined between dmin et dmax and can be approximated as having a period equal to dmax-dmin, which gave the following function:
- On the definition domain, the curves were first negative and then positive. This was the inverse of the behaviour of the function given by Equation (25). A final modification was therefore necessary:
- It was therefore a question of determining the amplitude function A which was written as:with fsoil a function depending on the type of soil and a function depending on the number of wheel passes N.
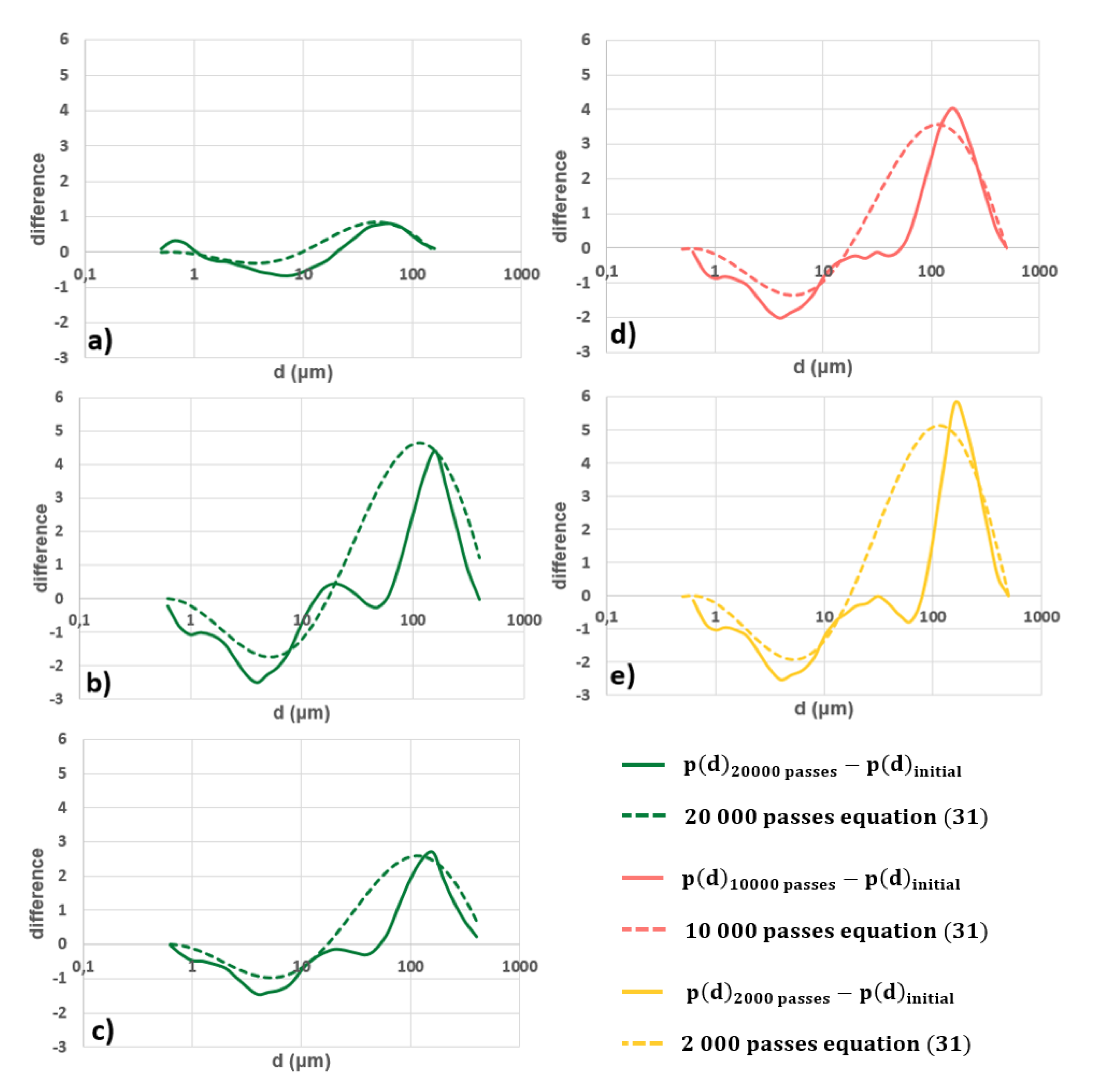
- The function was determined from the curves in Figure A1c–e. Assuming that fsoil = 1, the value of corresponded to the amplitude A of Equation (26). Then, was determined by trial-and-error in order to minimize the average weighted deviation between experimental and theoretical curves. The weighted deviation was defined by:A weighted deviation criterion was chosen in order to minimize the difference between experimental and theoretical curves for the amplitude peaks, which were the most important parts of the curve to model. According to that, it appeared that the best approximation for the function was a second-degree function:
- The fsoil function was determined using the curves in Figure A1a–c. These three curves corresponded to the case where (N = 20,000) = 0.49. The amplitude of the difference between 20,000 passes and initial soil was low for S0K100 (clay), medium for S75K25 and high for S50K50. Thus, it was considered that this amplitude depended on the product of the percentage of clay by the percentage of sand in the soil (). According to this definition and based on the particle size distributions of the three soils, S0K100 had 20% clay and 7% sand (), S50K50 had 13% clay and 36,6% sand () and S75K25 had 6,7% clay and 64% sand (). The amplitude function of Equation (26) to approximate the curves in Figure A1a–c was therefore:
References
- Pouliot, G.; Simon, H.; Bhave, P.; Tong, D.; Mobley, D.; Pace, T.; Pierce, T. Assessing the anthropogenic fugitive dust emission inventory and temporal allocation using an updated specification of particulate matter. Air Pollut. Model. Its Appl. 2012, XXI, 585–589. [Google Scholar]
- Serpell, A.; Kort, J.; Vera, S. Awareness, actions, drivers and barriers of sustainable construction in Chile. Technol. Econ. Dev. Econ. 2012, 19, 272–288. [Google Scholar] [CrossRef]
- Pope, C.A.; Dockery, D.W. Health effects of fine particulate air pollution: Lines that connect. J. Air Waste Manag. Assoc. 2006, 56, 709–742. [Google Scholar] [CrossRef]
- Mohapatra, K.; Biswal, S.K. Effect of Particulate Matter on plants, climate, ecosystem and human health. Int. J. Adv. Technol. Eng. Sci. 2014, 2, 118–129. [Google Scholar]
- Moosmüller, H.; Varma, R.; Arnot, W.P.; Kuhns, H.D.; Etyemezian, V.; Gillies, J.A. Scattering cross-section emission factors for visibility and radiative transfer applications: Military vehicles traveling on unpaved roads. J. Air Waste Manag. Assoc. 2005, 55, 1743–1750. [Google Scholar] [CrossRef] [PubMed]
- Baddock, M.C.; Strong, C.L.; Leys, J.F.; Heidenreich, S.K.; Tews, E.K.; McTainsh, G.H. A visibility and total suspended dust relationship. Atmos. Environ. 2014, 89, 329–336. [Google Scholar] [CrossRef]
- Ashley, W.S.; Strader, S.; Dziubla, D.C.; Haberlie, A. Driving blind: Weather-related vision hazards and fatal motor vehicle crashes. Bull. Am. Meteorol. Soc. 2015, 96, 755–778. [Google Scholar] [CrossRef]
- Call, D.A.; Wilson, C.S.; Shourd, K.N. Hazardous weather conditions and multiple-vehicle chain-reaction crashes in the United States. Meteorol. Appl. 2018, 25, 466–471. [Google Scholar] [CrossRef]
- Gambatese, J.A.; James, D.E. Dust suppression using truck-mounted water spray system. J. Constr. Eng. Manag. 2001, 127, 53–59. [Google Scholar] [CrossRef]
- U.S. Environmental Protection Agency. Compilation of Air Pollutant Emission Factors, AP-42 5th ed.; Office of Air Quality Planning and Standards, Research Triangle Park: North Carolina, NC, USA, 1995.
- Gillies, J.A.; Etyemezian, V.; Kuhns, H.; Nikolic, D.; Gillette, D.A. Effect of vehicle characteristics on unpaved road dust emissions. Atmos. Environ. 2005, 39, 2341–2347. [Google Scholar] [CrossRef]
- Muleski, G.E.; Cowherd, C.; Kinsey, J.S. Particulate emissions from construction activities. J. Air Waste Manag. Assoc. 2005, 55, 772–783. [Google Scholar] [CrossRef] [PubMed]
- Etyemezian, V.; Kuhns, H.; Gillies, J.; Green, M.; Pitchford, M.; Watson, J. Vehicle-based road dust emission measurement: III—Effect of speed, traffic volume, location, and season on PM10 road dust emissions in the Treasure Valley, ID. Atmos. Environ. 2003, 37, 4583–4593. [Google Scholar] [CrossRef]
- Kuhns, H.; Gillies, J.; Etyemezian, V.; Nikolich, G.; King, J.; Zhu, D.; Uppapalli, S.; Engelbrecht, J.; Kohl, S. Effect of Soil Type and Momentum on Unpaved Road Particulate Matter Emissions from Wheeled and Tracked Vehicles. Aerosol Sci. Technol. 2010, 44, 187–196. [Google Scholar] [CrossRef]
- Bagnold, R.A. The transport of sand by wind. Geogr. J. 1937, 89, 409–438. [Google Scholar] [CrossRef]
- Greeley, R.; Iversen, J.D. Wind as a Geologic Process on Earth, Mars, Venus and Titan; Cambridge University Press: New York, NY, USA, 1985. [Google Scholar]
- Shao, Y.; Lu, H. A simple expression for wind erosion threshold friction velocity. J. Geophys. Res. 2000, 105, 22437–22443. [Google Scholar] [CrossRef]
- Nicholson, K.W.; Branson, J.R.; Geiss, P.; Cannel, R.J. The effects of vehicle activity on particle resuspension. J. Aerosol Sci. 1989, 20, 1425–1428. [Google Scholar] [CrossRef]
- Klose, M.; Shao, Y. Stochastic parameterization of dust emission and application to convective atmospheric conditions. Atmos. Chem. Phys. 2012, 12, 7309–7320. [Google Scholar] [CrossRef]
- Karafiath, L.L.; Nowatzki, E.A. Soil Mechanics for Off-Road Vehicle Engineering; Series on Rock and Soil Mechanics; Trans Tech Publications: Clausthal, Germany, 1978. [Google Scholar]
- Shao, Y. Physics and Modelling of Wind Erosion, 2nd ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Klose, M.; Shao, Y.; Li, X.L.; Zhang, H.S.; Ishizuka, M.; Mikami, M.; Leys, J.F. Further development of a parameterization for convective turbulent dust emission and evaluation based on field observations. J. Geophys. Res. Atmos. 2014, 119, 10441–10457. [Google Scholar] [CrossRef]
- Li, X.L.; Klose, M.; Shao, Y.; Zhang, H.S. Convective Turbulent Dust Emission (CTDE) observed over Horqin Sandy Land area and validation of a CTDE scheme. J. Geophys. Res. Atmos. 2014, 119, 9980–9992. [Google Scholar] [CrossRef]
- Klose, M. Convective Turbulent Dust Emission: Process, Parametrization and Relevance in the Earth System. Ph.D. Thesis, University of Cologne, Cologne, Germany, 2014. [Google Scholar]
- ISO 13317-1:2001—Determination of Particle Size Distribution by Gravitational Liquid Sedimentation Methods—Part 1: General Principles and Guidelines; International Organization of Standardization: Geneva, Switzerland, 2001.
- ISO 2591-1:1988—Test Sieving—Part 1: Methods Using Test Sieves of Woven Wire Cloth and Perforated Metal Plate; International Organization of Standardization: Geneva, Switzerland, 1988.
- ISO 13320:2020—Particle Analysis—Laser Diffraction Methods; International Organization of Standardization: Geneva, Switzerland, 2020.
- Sediki, O. Étude des Mécanismes D’instabilité et D’envol des Particules en Lien avec L’hydratation des Sols Fins. Ph.D. Thesis, Université de Lorraine, Lorraine, France, 2018. (In French). [Google Scholar]
- Zimon, A.D. Adhesion of Dust and Powder; Consultants Bureau: New York, NY, USA, 1982. [Google Scholar]
- Corn, M. The adhesion of solid particles to solid surfaces, II. J. Air Pollut. Control Assoc. 1961, 11, 566–584. [Google Scholar] [CrossRef]
- Braaten, D.A.; Paw, U.K.T.; Shaw, R.H. Particle resuspension in a turbulent boundary layer—Observed and modelled. J. Aerosol Sci. 1990, 21, 613–628. [Google Scholar] [CrossRef]
- Biasi, L.; de los Reyes, A.; Reeks, M.W.; de Santi, G.F. Use of a simple model for the interpretation of experimental data on particle resuspension in turbulent flows. J. Aerosol Sci. 2001, 32, 1175–1200. [Google Scholar] [CrossRef]
- Orszag, S.A. Numerical methods for the simulation of turbulence. Phys. Fluids 1969, 12, II-250–II-257. [Google Scholar] [CrossRef]
- Berera, A.; Ho, R.D.J.G. Chaotic properties of a turbulent isotropic fluid. Phys. Rev. Lett. 2018, 120, 024101. [Google Scholar] [CrossRef]
- Rodriguez, S. Overview of fluid dynamics and turbulence. In Applied Computational Fluid Dynamics and Turbulence Modeling; Springer: Cham, Germany, 2019. [Google Scholar]
- Rohatgi, V.K. An Introduction to Probability Theory and Mathematical Statistics; Wiley Series in Probability and Statistics: New York, NY, USA, 1976. [Google Scholar] [CrossRef]
- Sediki, O.; Razakamanantsoa, A.R.; Hattab, M.; Le Borgne, T.; Fleureau, J.M.; Gotteland, P. Degradability of unpaved roads submitted to traffic and environmental solicitations: Laboratory scale. In Proceedings of the TC106 Conferences in Unsaturated Soils—7th International Conference of Unsaturated Soils, Hong Kong, China, 3–5 August 2018. [Google Scholar]
- Le Vern, M.; Sediki, O.; Razakamanantsoa, A.R.; Murzyn, F.; Larrarte, F. Experimental study of particle lift initiation on roller compacted sand-clay mixtures. Environ. Geotech. 2020, in press. [Google Scholar] [CrossRef]
- GTR. Guide Français Pour la « Réalisation des Remblais et des Couches de Forme», 2nd ed.; IFSTTAR-CEREMA; French Ministry of Ecology, Sustainable Development and Energy: Paris, France, 2000. (In French) [Google Scholar]
- Proctor, R.R. Fundamental principles of soil compaction. Eng. New Rec. 1933, 119, 245–248. [Google Scholar]
- Antille, D.L.; Bennett, J.M.; Jensen, T.A. Soil compaction and controlled traffic considerations in Australian cotton-farming systems. Crop Pasture Sci. 2016, 61, 1–28. [Google Scholar] [CrossRef]
- CATERPILLAR. Caterpillar Performance Handbook Edition 44: ARTICULATED TRUCK, Technical Paper. 2014. Available online: https://www.hawthornecat.com/sites/default/files/content/download/pdfs/Articulated_Trucks_CPH_v1.1_03.13.14.pdf (accessed on 3 December 2019).
- Midwest Research Institute. Improvement of Specific Emission Factors (BACM Project No. 1); Midwest Research Institute: Kansas City, MO, USA, March 1996. [Google Scholar]
- Djenedi, L.; Talluru, K.M.; Antonia, R.A. A velocity defect chart method for estimating the friction velocity in turbulent boundary layers. Fluid Dyn. Res. 2019, 51. [Google Scholar] [CrossRef]
- Schlichting, H. Boundary Layer Theory, 7th ed.; McGraw-Hill Book Comp.: New York, NY, USA, 1979. [Google Scholar]
- U.S. Department of Agriculture. Soil Survey Manual. In Soil Science Division Staff, Agricultural Handbook No. 18; Government Printing Office: Washington, DC, USA, March 2017. [Google Scholar]
- Etyemezian, V.; Kuhns, H.; Gillies, J.; Green, M.; Pitchford, M.; Watson, J. Vehicle-based road dust emission measurement: I—Methods and calibration. Atmos. Environ. 2003, 37, 4559–4571. [Google Scholar] [CrossRef]
- Organiscak, J.A.; Reed, W.R. Characteristics of fugitive dust generated from unpaved mine haulage roads. Int. J. Surf. Min. Reclam. Environ. 2004, 18, 236–252. [Google Scholar] [CrossRef]
- Reed, W.R.; Organiscak, J.A. Haul Road Dust Control: Fugitive dust characteristics from surface mine haul roads and methods of control. Coal Age 2007, 112, 34–37. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | Soil | Dry Density after Compaction (kg·m−3) | Water Content during Compaction (%) | Water Content during Traffic Degradation (%) | Number of Wheel Passes (N) | Tire Type a |
|---|---|---|---|---|---|---|
| Sample I | S0K100 | 1470.00 | 28.20 | 21.12 | 20,000 | M |
| Sample II | S50K50 | 1801.00 | 16.00 | 12.98 | 20,000 | M |
| Sample III | S75K25 | 1873.00 | 12.40 | 9.45 | 20,000 | M |
| Sample IV | S75K25 | 1873.00 | 12.40 | 8.95 | 10,000 | M |
| Sample V | S75K25 | 1873.00 | 12.40 | 9.30 | 20,000 | C |
| Height from the Surface (y in mm) | Vertical Spacing between Two Measuring Points (mm) | Number of Measuring Points |
|---|---|---|
| 0.10 | 21 | |
| 0.20 | 5 | |
| 0.50 | 4 | |
| 1.00 | 5 | |
| 2.00 | 5 | |
| 10.00 | 3 |
| Soil | c1 | c2 | c3 | c4 | c5 | Corresponding Equation |
|---|---|---|---|---|---|---|
| S0K100 | (18-a) | |||||
| S50K50 | (18-b) | |||||
| S75K25 | (18-c) |
| Position | U∞ = 8 m/s | U∞ = 16 m/s | |||||
|---|---|---|---|---|---|---|---|
| H | u* (m/s) | δvs (µm) | H | u* (m/s) | δvs (µm) | ||
| Sample I | x = −0.03 m | 1.72 | 0.26 | 300 | 1.23 | 0.51 | 153 |
| x = 0.05 m | 1.45 | 0.29 | 269 | 1.23 | 0.44 | 177 | |
| x = 0.15 m | 1.37 | 0.28 | 278 | 1.30 | 0.58 | 134 | |
| x = 0.27 m | 1.26 | 0.24 | 325 | 1.26 | 0.53 | 147 | |
| Sample III | x = −0.03 m | 1.78 | 0.32 | 244 | 1.39 | 0.54 | 144 |
| x = 0.05 m | 1.22 | 0.30 | 260 | 1.52 | 0.62 | 126 | |
| x = 0.15 m | 1.50 | 0.34 | 229 | 1.33 | 0.66 | 118 | |
| x = 0.27 m | 1.38 | 0.31 | 252 | 1.35 | 0.62 | 126 | |
| Sample IV | x = −0.03 m | 1.70 | 0.32 | 244 | 1.32 | 0.55 | 142 |
| x = 0.05 m | 2.18 | 0.72 | 108 | 2.03 | 1.37 | 57 | |
| x = 0.15 m | 1.71 | 0.27 | 289 | 1.23 | 0.73 | 107 | |
| x = 0.27 m | 1.24 | 0.21 | 371 | 1.22 | 0.51 | 153 | |
| Sample V | x = -0.03 m | 1.62 | 0.32 | 244 | 1.73 | 0.65 | 120 |
| x = 0.05 m | 1.42 | 0.17 | 459 | 1.16 | 0.42 | 186 | |
| x = 0.15 m | 1.39 | 0.24 | 325 | 1.23 | 0.62 | 126 | |
| x = 0.27 m | 1.19 | 0.17 | 459 | 1.16 | 0.45 | 173 | |
| Vehicle Type | Weight (kg) | Tire Width (m) | EF (kg·vkt−1) | EF (kg·m−2) b | |
|---|---|---|---|---|---|
| Ut = 30 km·h−1 | Ut = 60 km·h−1 | ||||
| GMC C5500 | 5 227 | 0.245 | 0.0019 × Ut a | 0.0012 | 0.0023 |
| M977 HEMTT | 17 727 | 0.400 | 0.0048 × Ut | 0.0018 | 0.0036 |
| M923A2 (5-ton) | 14 318 | 0.355 | 0.0047 × Ut | 0.0020 | 0.0040 |
| M1078 LMTV | 8 060 | 0.395 | 0.0018 × Ut | 0.0007 | 0.0014 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le Vern, M.; Sediki, O.; Razakamanantsoa, A.; Murzyn, F.; Larrarte, F. Experimental Assessment of Dust Emissions on Compacted Soils Degraded by Traffic. Atmosphere 2020, 11, 369. https://doi.org/10.3390/atmos11040369
Le Vern M, Sediki O, Razakamanantsoa A, Murzyn F, Larrarte F. Experimental Assessment of Dust Emissions on Compacted Soils Degraded by Traffic. Atmosphere. 2020; 11(4):369. https://doi.org/10.3390/atmos11040369
Chicago/Turabian StyleLe Vern, Mickael, Ouardia Sediki, Andry Razakamanantsoa, Frédéric Murzyn, and Frédérique Larrarte. 2020. "Experimental Assessment of Dust Emissions on Compacted Soils Degraded by Traffic" Atmosphere 11, no. 4: 369. https://doi.org/10.3390/atmos11040369
APA StyleLe Vern, M., Sediki, O., Razakamanantsoa, A., Murzyn, F., & Larrarte, F. (2020). Experimental Assessment of Dust Emissions on Compacted Soils Degraded by Traffic. Atmosphere, 11(4), 369. https://doi.org/10.3390/atmos11040369