Improvements in Forecasting Intense Rainfall: Results from the FRANC (Forecasting Rainfall Exploiting New Data Assimilation Techniques and Novel Observations of Convection) Project

 ,
,  , , , , add
Show full author list
, , , , add
Show full author list
Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Operational Hydrometeorological Forecasting in the UK
- Weather radar
- The operational weather radar network used by the UK consists of 15 dual polarisation and Doppler weather radars owned and operated by the Met Office, 1 dual polarisation and Doppler weather radar operated by Jersey Met, and two single polarisation radars operated by Met Éireann. An additional non-operational dual polarisation and Doppler radar, with the same specification as the rest of the network, is available to the Met Office at Wardon Hill, for research and development purposes. All 19 radars operate at C-band. More details of the system are described by [14]*. Radar observations are used in several ways in the flood forecasting chain. They are assimilated into the UKV (convection-permitting NWP model configuration) alongside a wide range of other observation types. Radar-derived rain-rate products are also used for extrapolation-based nowcasting (e.g., in the Short Term Ensemble Prediction System (STEPS) [15,16], which blends the extrapolation with NWP), and as a component of the input to the G2G (Grid-to-Grid hydrological model).
- Data assimilation
- Initial conditions for convection-permitting NWP are provided from an incremental variational assimilation scheme [17] that is a limited-area version of the Met Office variational data assimilation scheme [18]. The scheme was upgraded in July 2017 from a 3-hourly cycling 3D system to an hourly-cycling 4D system, where a simplified linear version of the NWP model and its adjoint are iterated. The hourly-cycling 4D-Var scheme allows improved usage of the observations and more frequent forecast updates and hence improved forecasts [11]. The assimilation uses an adaptive mesh that allows the accurate representation of boundary layer structures [19,20]. Observations that are routinely assimilated include Doppler radar winds; wind profilers; satellite radiances from Meteosat Second Generation (MSG) SEVIRI (Spinning Enhanced Visible and InfraRed Imager), MHS (Microwave Humidity Sounder), IASI (Infrared Atmospheric Sounding Interferometer), CrIS (Cross-track Infrared Sounder), AIRS (Atmospheric Infrared Sounder) and ATMS (Advanced Technology Microwave Sounder); atmospheric motion vectors (AMVs) derived from MSG cloud and humidity tracking; scatterometer winds; aircraft temperature and winds (AMDAR); surface temperature, relative humidity, wind pressure and visibility; radiosonde temperature and wind; Global Navigation Satellite System (GNSS) zenith total delay; cloud parameters from 1D-Var analysis of SEVIRI data (GeoCloud) [21]. In addition, in the current system, latent heat nudging of radar-derived rain-rates is carried out [22], but work is ongoing to develop direct assimilation of radar reflectivity (see Section 4). More details of the system are described by [11,23].
- Weather forecast models
- The deterministic NWP modelling system used is the Met Office UKV, the variable-resolution configuration of the nonhydrostatic Unified Model [6], that allows an explicit representation of convective processes as described by [5]. The UKV has a 1.5 km fixed horizontal grid-spacing in its interior surrounded by a variable-resolution grid that increases smoothly in size to 4 km. There are 70 vertical levels up to a height of approximately 40 km. The variable-resolution grid allows for a larger domain and for the downscaled boundary conditions, taken from the global model, to spin up without an abrupt change in resolution before reaching the fixed interior grid. Forecast length varies depending on the start time: the longest, 120 h forecast is produced twice daily (from 03 and 15Z analyses).
- Numerical weather prediction ensemble
- The Met Office Global and Regional Ensemble Prediction System (MOGREPS) provides an ensemble of short-range NWP forecasts. The MOGREPS-UK ensemble [24] consists of a control plus 11 perturbed ensemble members each running with an interior 2.2 km horizontal grid-spacing and the same 70 vertical levels as the UKV model configuration. The control member is initialized from the UKV analysis interpolated onto the 2.2 km grid. For the other 11 members, perturbations from the corresponding global ensemble (MOGREPS-G) member are added to the interpolated UKV control analysis. Lateral boundary conditions are provided from the corresponding global ensemble member. In March 2016, a random parameters stochastic physics scheme was implemented. This perturbs selected parameters across the ensemble members in order to represent uncertainties in key physical processes and their contributions to uncertainties in the forecasts [25]. MOGREPS-UK forecasts for 54 h from analysis times at 03, 09, 15 and 21Z.
- Hydrological model
- The Grid-to-Grid (G2G) model [26] is a distributed hydrological model, driven by inputs of gridded rainfall. The rainfall inputs are an optimal combination of rain-gauge, radar and NWP, with the blend dependent on lead-time [3]. (The skill of NWP-based nowcasting is assessed as a function of lead-time by [27]). The G2G model uses a simple runoff production scheme to generate surface and sub-surface runoff, controlled by the soil characteristics of each 1 km × 1 km grid cell, and these are defined from spatial data sets covering soil/geology and land cover properties. Further information about the system is given by [3,4].
3. Weather Radar Observations
3.1. Removal of Non-Meteorological Effects
3.2. Radar Reflectivity Attenuation Correction
- The current single polarisation attenuation correction scheme, known as the Hitschfeld and Borden approach (H&B) [35], uses the measured reflectivity to estimate the attenuation due to storms. As the attenuation correction is a cumulative value which is added to subsequent range gates before the correction for those gates is calculated, it is unstable and can grow to unrealistically high values if the reflectivity measurement is incorrectly calibrated or contaminated by non-rain returns.
- The Met Office weather radars are thought to be unique in that they have an additional means of measuring the total attenuation along a given path by making use of the radiometric emissions from attenuating storms. This provides a valuable additional constraint on the attenuation [38]*.
3.3. Radar Refractivity Observations
4. Weather Radar Data Assimilation
5. Uncertainty in Data Assimilation
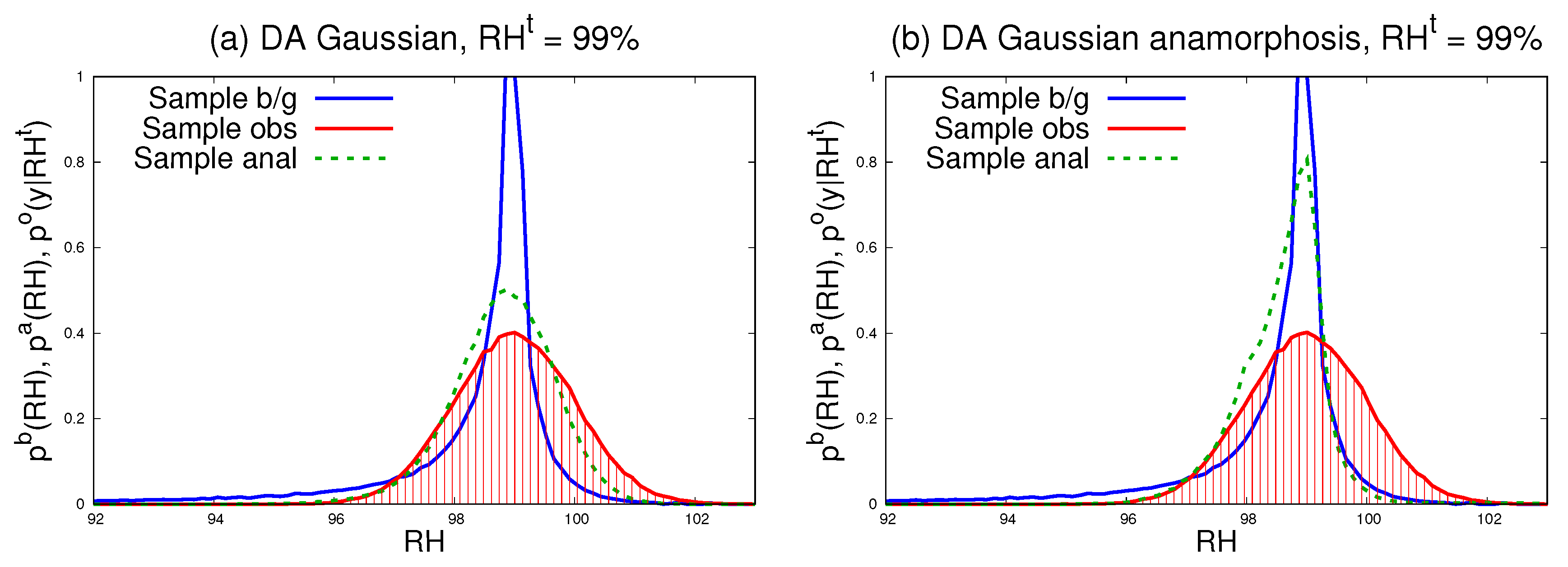
5.1. Observation Uncertainty in Data Assimilation
5.2. Forecast Uncertainty in Data Assimilation
5.3. Linear Models of Convection
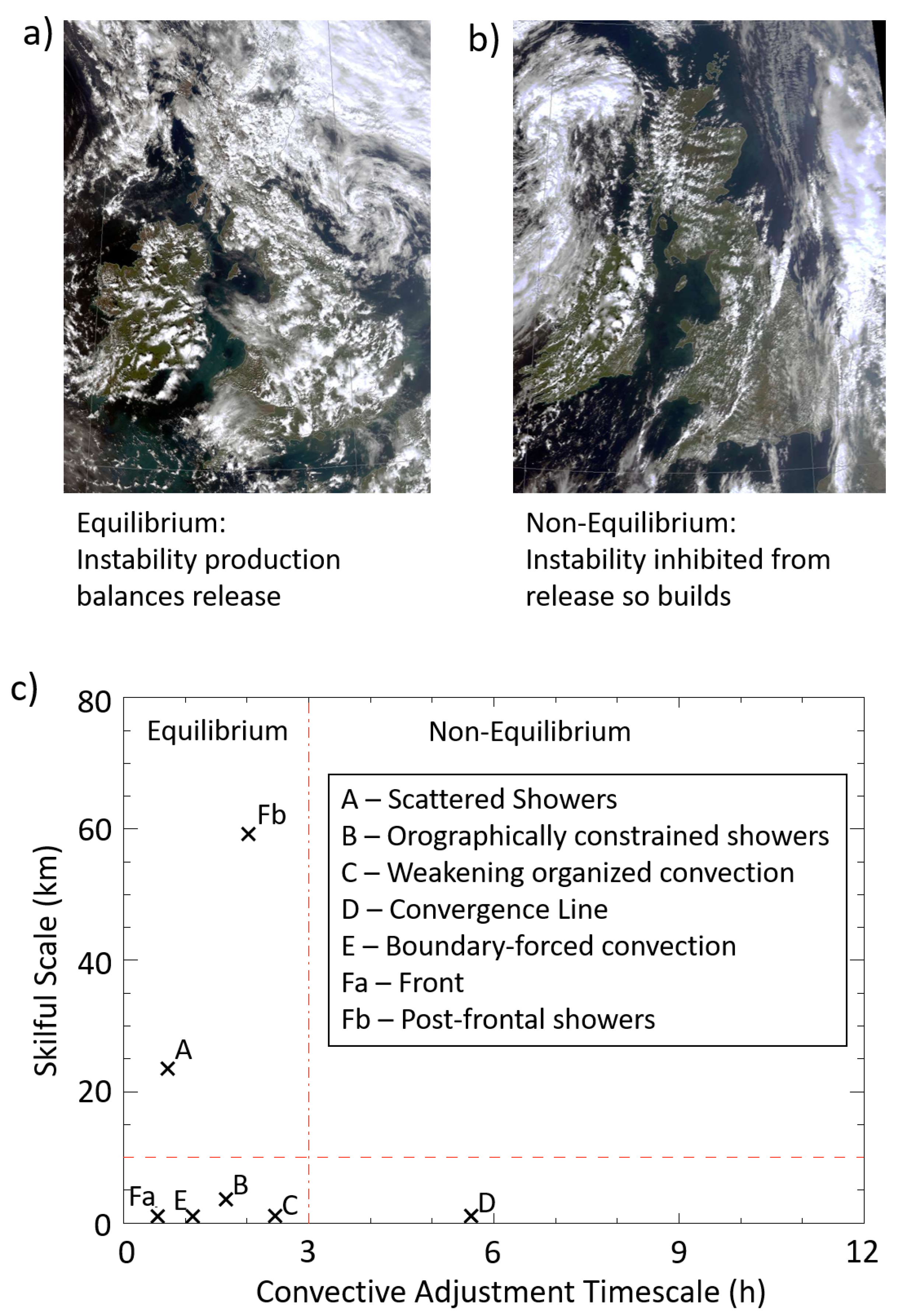
6. Convective Predictability
7. Operational Impact and Research Partnership
8. Conclusions
- Research councils should fund more academic/operational partnerships with co-design of proposals and co-creation of research
- There is a need for a better understanding and integrated use of objective skill measures that give useful information about weather forecasts and their impact on flood forecasts
- There is a need for a stronger partnership between meteorology and hydrology including “translation” of technical terms and operational system constraints.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kendon, E.J.; Roberts, N.M.; Fowler, H.J.; Roberts, M.J.; Chan, S.C.; Senior, C.A. Heavier summer downpours with climate change revealed by weather forecast resolution model. Nat. Clim. Chang. 2014, 4, 570–576. [Google Scholar] [CrossRef]
- Alfieri, L.; Burek, P.; Dutra, E.; Krzeminski, B.; Muraro, D.; Thielen, J.; Pappenberger, F. GloFAS—Global ensemble streamflow forecasting and flood early warning. Hydrol. Earth Syst. Sci. 2013, 17, 1161–1175. [Google Scholar] [CrossRef]
- Price, D.; Hudson, K.; Boyce, G.; Schellekens, J.; Moore, R.; Clark, P.; Harrison, T.; Connolly, E.; Pilling, C. Operational use of a grid-based model for flood forecasting. Proc. Inst. Civ. Eng. Water Manag. 2012, 165, 65–77. [Google Scholar] [CrossRef]
- Pilling, C. New developments at the Flood Forecasting Centre: Operations and flood risk guidance. WIT Trans. Built Environ. 2016, 165, 237–248. [Google Scholar] [CrossRef]
- Lean, H.; Clark, P.; Dixon, M.; Roberts, N.; Fitch, A.; Forbes, R.; Halliwell, C. Characteristics of high-resolution versions of the Met Office Unified Model for forecasting convection over the United Kingdom. Mon. Weather Rev. 2008, 136, 3408–3424. [Google Scholar] [CrossRef]
- Tang, Y.; Lean, H.W.; Bornemann, J. The benefits of the Met Office variable resolution NWP model for forecasting convection. Meteorol. Appl. 2013, 20, 416–426. [Google Scholar] [CrossRef]
- Hohenegger, C.; Schar, C. Atmospheric predictability at synoptic versus cloud-resolving scales. Bull. Am. Meteorol. Soc. 2007, 88, 1783–1793. [Google Scholar] [CrossRef]
- Melhauser, C.; Zhang, F. Practical and intrinsic predictability of severe and convective weather at the mesoscales. J. Atmos. Sci. 2012, 69, 3350–3371. [Google Scholar] [CrossRef]
- Dance, S.L. Issues in high resolution limited area data assimilation for quantitative precipitation forecasting. Phys. D Nonlinear Phenom. 2004, 196, 1–27. [Google Scholar] [CrossRef]
- Sun, J.; Xue, M.; Wilson, J.W.; Zawadzki, I.; Ballard, S.P.; Onvlee-Hooimeyer, J.; Joe, P.; Barker, D.M.; Li, P.W.; Golding, B.; et al. Use of NWP for nowcasting convective precipitation: Recent progresses and challenges. Bull. Am. Meteorol. Soc. 2014, 95, 409–426. [Google Scholar] [CrossRef]
- Ballard, S.P.; Li, Z.; Simonin, D.; Caron, J.F. Performance of 4D-Var NWP-based nowcasting of precipitation at the Met Office for summer 2012. Q. J. R. Meteorol. Soc. 2016. [Google Scholar] [CrossRef]
- Clark, P.; Roberts, N.; Lean, H.; Ballard, S.P.; Charlton-Perez, C. Convection-permitting models: A step-change in rainfall forecasting. Meteorol. Appl. 2016, 23, 165–181. [Google Scholar] [CrossRef]
- Gustafsson, N.; Janjić, T.; Schraff, C.; Leuenberger, D.; Weissman, M.; Reich, H.; Brousseau, P.; Montmerle, T.; Wattrelot, E.; Bunek, A.; et al. Survey of data assimilation methods for convective-scale numerical weather prediction at operational centres. Q. J. R. Meteorol. Soc. 2017. [Google Scholar] [CrossRef]
- Harrison, D.; Norman, K.; Darlington, T.; Adams, D.; Husnoo, N.; Sandford, C.; Best, S. The evolution of the Met Office radar data quality control and product generation system: Radarnet. In Proceedings of the 37th AMS Conference on Radar Meteorology, Norman, OK, USA, 14--18 September 2015. [Google Scholar]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Seed, A.W.; Pierce, C.E.; Norman, K. Formulation and evaluation of a scale decomposition-based stochastic precipitation nowcast scheme. Water Resour. Res. 2013, 49, 6624–6641. [Google Scholar] [CrossRef]
- Courtier, P.; Thepaut, J.; Hollingsworth, A. A strategy for operational implementation of 4D-Var, using an incremental approach. Q. J. R. Meteorol. Soc. 1994, 120, 1367–1387. [Google Scholar] [CrossRef]
- Rawlins, F.; Ballard, S.P.; Bovis, K.J.; Clayton, A.M.; Li, D.; Inverarity, G.W.; Lorenc, A.C.; Payne, T.J. The Met Office global four-dimensional variational data assimilation scheme. Q. J. R. Meteorol. Soc. 2007, 133, 347–362. [Google Scholar] [CrossRef]
- Piccolo, C.; Cullen, M. Adaptive mesh method in the Met Office variational data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 631–640. [Google Scholar] [CrossRef]
- Piccolo, C.; Cullen, M. A new implementation of the adaptive mesh transform in the Met Office 3D-Var system. Q. J. R. Meteorol. Soc. 2012, 138, 1560–1570. [Google Scholar] [CrossRef]
- Renshaw, R.; Francis, P.N. Variational assimilation of cloud fraction in the operational Met Office Unified Model. Q. J. R. Meteorol. Soc. 2011, 137, 1963–1974. [Google Scholar] [CrossRef]
- Jones, C.; Macpherson, B. A latent heat nudging scheme for the assimilation of precipitation data into an operational mesoscale model. Meteorol. Appl. 1997, 4, 269–277. [Google Scholar] [CrossRef]
- Simonin, D.; Ballard, S.P.; Li, Z. Doppler radar radial wind assimilation using an hourly cycling 3D-Var with a 1.5 km resolution version of the Met Office Unified Model for nowcasting. Q. J. R. Meteorol. Soc. 2014, 140, 2298–2314. [Google Scholar] [CrossRef]
- Hagelin, S.; Son, J.; Swinbank, R.; McCabe, A.; Roberts, N.; Tennant, W. The Met Office convective-scale ensemble, MOGREPS-UK. Q. J. R. Meteorol. Soc. 2017, 143, 2846–2861. [Google Scholar] [CrossRef]
- McCabe, A.; Swinbank, R.; Tennant, W.; Lock, A. Representing model uncertainty in the Met Office convection-permitting ensemble prediction system and its impact on fog forecasting. Q. J. R. Meteorol. Soc. 2016, 142, 2897–2910. [Google Scholar] [CrossRef]
- Bell, V.; Kay, A.; Jones, R.; Moore, R.; Reynard, N. Use of soil data in a grid-based hydrological model to estimate spatial variation in changing flood risk across the UK. J. Hydrol. 2009, 377, 335–350. [Google Scholar] [CrossRef]
- Simonin, D.; Pierce, C.; Roberts, N.; Ballard, S.P.; Li, Z. Performance of Met Office hourly cycling NWP-based nowcasting for precipitation forecasts. Q. J. R. Meteorol. Soc. 2017, 143, 2862–2873. [Google Scholar] [CrossRef]
- Darlington, T.; Adams, D.; Best, S.; Husnoo, N.; Lyons, S.; Norman, K. Optimising the Accuracy of Radar Products With Dual Polarisation: ProjeCt Benefits; Technical Report; Met Office: Exeter, UK, 2016. [Google Scholar]
- Rico-Ramirez, M.; Cluckie, I.D. Classification of Ground Clutter and Anomalous Propagation Using Dual-Polarization Weather Radar. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1892–1904. [Google Scholar] [CrossRef]
- Illingworth, A.; Thompson, R. Correction of Radar Reflectivity Due to Partial Beam Blocking. In Proceedings of the 38th Conference on Radar Meteorology, Chicago, IL, USA, 28 August–1 September 2017; p. 24A.1. [Google Scholar]
- Tabary, P. The new French operational radar rainfall product. Part I: Methodology. Weather Forecast. 2007, 22, 393–408. [Google Scholar] [CrossRef]
- Germann, U.; Galli, G.; Boscacci, M.; Bolliger, M. Radar precipitation measurement in a mountainous region. Q. J. R. Meteorol. Soc. 2006, 132, 1669–1692. [Google Scholar] [CrossRef]
- Fairman, J.G., Jr.; Schultz, D.M.; Kirshbaum, D.J.; Gray, S.L.; Barrett, A.I. A radar-based rainfall climatology of Great Britain and Ireland. Weather 2015, 70, 153–158. [Google Scholar] [CrossRef]
- Thompson, R.; Illingworth, A.; Ovens, J. Emission: A simple new technique to correct rainfall estimates from attenuation due to both the radome and heavy rainfall. In International Symposium on Weather Radar and Hydrology (WRaH 2011); Moore, R.J., Cole, S.J., Illingworth, A.J., Eds.; IAHS: London, UK, 2012; pp. 39–44. [Google Scholar]
- Hitschfeld, W.; Bordan, J. Errors inherent in the radar measurement of rainfall at attenuating wavelengths. J. Meteorol. 1954, 11, 58–67. [Google Scholar] [CrossRef]
- Bringi, V.; Chandrasekar, V.; Balakrishnan, N.; Zrnic, D.S. An examination of propagation effects in rainfall on radar measurements at microwave frequencies. J. Atmos. Ocean. Technol. 1990. [Google Scholar] [CrossRef]
- Carey, L.D.; Rutledge, S.A.; Ahijevych, D.A.; Keenan, T.D. Correcting propagation effects in C-band polarimetric radar observations of tropical convection using differential propagation phase. J. Appl. Meteorol. 2000, 39, 1405–1433. [Google Scholar] [CrossRef]
- Husnoo, N.; Darlington, T.; Thompson, R.; Illingworth, A. C-band Attenuation Correction in Heavy Rainfall Using Radiometric Emissions. In Proceedings of the 37th Conference on Radar Meteorology, Norman, OK, USA, 14–18 September 2015; p. 7B.4. [Google Scholar]
- Husnoo, N.; Darlington, T.; Thompson, R.; Illingworth, A. 6.18 Evaluation of Reflactivity/Polarimetry/ Radiometry Based C-Band Attenuation Correction Scheme Using Neighbouring Radars. In Proceedings of the 10th European Conference on Radar in Meteorology and Hydrology (ERAD 2018), Wageningen, The Netherlands, 1–6 July 2018; p. 252. [Google Scholar]
- Weckwerth, T.M.; Wilson, J.W.; Wakimoto, R.M. Thermodynamic variability within the convective boundary layer due to horizontal convective rolls. Mon. Weather Rev. 1996, 124, 769–784. [Google Scholar] [CrossRef]
- Fabry, F.; Frush, C.; Zawadzki, I.; Kilambi, A. On the extraction of near-surface index of refraction using radar phase measurements from ground targets. J. Atmos. Ocean. Technol. 1997, 14, 978–987. [Google Scholar] [CrossRef]
- Nicol, J.; Bartholemew, K.; Darlington, T.; Illingworth, A. Operational radar refractivity retrieval for numerical weather prediction. In Proceedings of the 8th International Symposium Weather Radar and Hydrology, Exeter, UK, 18–21 April 2011. [Google Scholar]
- Nicol, J.; Illingworth, A.; Darlington, T.; Kitchen, M. Quantifying errors due to frequency changes and target location uncertainty for radar refractivity retrievals. J. Atmos. Ocean. Technol. 2013, 30, 2006–2024. [Google Scholar] [CrossRef]
- Nicol, J.; Illingworth, A. The effect of phase-correlated returns and spatial smoothing on the accuracy of radar refractivity retrievals. J. Atmos. Ocean. Technol. 2013, 30, 22–39. [Google Scholar] [CrossRef]
- Caumont, O.; Ducrocq, V.; Wattrelot, E.; Jaubert, G.; Pradier-Vabre, S. 1D+3DVar assimilation of radar reflectivity data: A Proof of concept. Tellus A 2010, 62, 173–187. [Google Scholar] [CrossRef]
- Wattrelot, E.; Caumont, O.; Mahfouf, J.F. Operational Implementation of the 1D+3D-Var Assimilation Method of Radar Reflectivity Data in the AROME Model. Mon. Weather Rev. 2014, 142, 1852–1873. [Google Scholar] [CrossRef]
- Kawabata, T.; Kuroda, T.; Seko, H.; Saito, K. A Cloud-Resolving 4DVAR Assimilation Experiment for a Local Heavy Rainfall Event in the Tokyo Metropolitan Area. Mon. Weather Rev. 2011, 139, 1911–1931. [Google Scholar] [CrossRef]
- Wang, H.; Sun, J.; Zhang, X.; Huang, X.Y.; Auligné, T. Radar Data Assimilation with WRF 4D-Var. Part I: System Development and Preliminary Testing. Mon. Weather Rev. 2013, 141, 2224–2244. [Google Scholar] [CrossRef]
- Sun, J. Convective-scale assimilation of radar data: Progress and challenges. Q. J. R. Meteorol. Soc. 2005, 131, 3439–3463. [Google Scholar] [CrossRef]
- Hawkness-Smith, L.; Ballard, S. Assimilation of radar reflectivity data in the Met Office convective-scale forecast system. In Proceedings of the 36th AMS Conference on Radar Meteorology, Breckenridge, CO, USA, 16–20 September 2013. [Google Scholar]
- Janjić, T.; Bormann, N.; Bocquet, M.; Carton, J.A.; Cohn, S.E.; Dance, S.L.; Losa, S.N.; Nichols, N.K.; Potthast, R.; Waller, J.A.; Weston, P. On the representation error in data assimilation. Q. J. R. Meteorol. Soc. 2017. [Google Scholar] [CrossRef]
- Waller, J.A.; Dance, S.L.; Lawless, A.S.; Nichols, N.K.; Eyre, J.R. Representativity error for temperature and humidity using the Met Office high-resolution model. Q. J. R. Meteorol. Soc. 2014, 140, 1189–1197. [Google Scholar] [CrossRef]
- Desroziers, G.; Berre, L.; Chapnik, B.; Poli, P. Diagnosis of observation, background and analysis-error statistics in observation space. Q. J. R. Meteorol. Soc. 2005, 131, 3385–3396. [Google Scholar] [CrossRef]
- Waller, J.A.; Simonin, D.; Dance, S.L.; Nichols, N.K.; Ballard, S.P. Diagnosing observation error correlations for Doppler radar radial winds in the Met Office UKV model using observation-minus-background and observation-minus-analysis statistics. Mon. Weather Rev. 2016, 144, 3533–3551. [Google Scholar] [CrossRef]
- Waller, J.A.; Ballard, S.P.; Dance, S.L.; Kelly, G.; Nichols, N.K.; Simonin, D. Diagnosing Horizontal and Inter-Channel Observation Error Correlations for SEVIRI Observations Using Observation-Minus-Background and Observation-Minus-Analysis Statistics. Remote Sens. 2016, 8, 581. [Google Scholar] [CrossRef]
- Cordoba, M.; Dance, S.; Kelly, G.; Nichols, N.; Waller, J. Diagnosing Atmospheric Motion Vector observation errors for an operational high resolution data assimilation system. Q. J. R. Meteorol. Soc. 2017, 143, 333–341. [Google Scholar] [CrossRef]
- Waller, J.A.; Dance, S.L.; Nichols, N.K. Theoretical insight into diagnosing observation error correlations using observation-minus-background and observation-minus-analysis statistics. Q. J. R. Meteorol. Soc. 2016, 142, 418–431. [Google Scholar] [CrossRef]
- Waller, J.A.; Dance, S.L.; Nichols, N.K. On diagnosing observation error statistics in localized ensemble data assimilation. Q. J. R. Meteorol. Soc. 2017. [Google Scholar] [CrossRef]
- Waller, J.; Bauernschubert, E.; Dance, S.L.; Nichols, N.K.; Potthast, R. Observation error statistics for Doppler Radar radial winds assimilated into 2 the DWD COSMO-KENDA system. 2018; submitted. [Google Scholar]
- Simonin, D.; Waller, J.A.; Ballard, S.P.; Dance, S.L.; Nichols, N.K. A pragmatic strategy for implementing spatially correlated observation errors in an operational system: Demonstration for Doppler radial winds. 2018; submitted. [Google Scholar]
- Schwartz, C.S.; Liu, Z. Convection-permitting forecasts initialized with continuously cycling limited-area 3DVAR, ensemble Kalman filter, and “hybrid” variational–ensemble data assimilation systems. Mon. Weather Rev. 2014, 142, 716–738. [Google Scholar] [CrossRef]
- Ingleby, N.; Lorenc, A.; Ngan, K.; Rawlins, F.; Jackson, D. Improved variational analyses using a nonlinear humidity control variable. Q. J. R. Meteorol. Soc. 2013, 139, 1875–1887. [Google Scholar] [CrossRef]
- Bocquet, M.; Pires, C.A.; Wu, L. Beyond Gaussian statistical modeling in geophysical data assimilation. Mon. Weather Rev. 2010, 138, 2997–3023. [Google Scholar] [CrossRef]
- Errico, R.M.; Bauer, P.; Mahfouf, J.F. Issues regarding the assimilation of cloud and precipitation data. J. Atmos. Sci. 2007, 64, 3785–3798. [Google Scholar] [CrossRef]
- Oxley, A. Linear Models of Non-Precipitating Convection. Ph.D. Thesis, University of Surrey, Guildford, UK, 2018. [Google Scholar]
- Flack, D.L.A.; Plant, R.S.; Gray, S.L.; Lean, H.W.; Craig, G.C. Convective-Scale Perturbation Growth Across the Spectrum of Convective Regimes. Mon. Weather Rev. 2018, 146, 387–405. [Google Scholar] [CrossRef]
- Arakawa, A.; Schubert, W.H. Interaction of a Cumulus Cloud Ensemble with the Large-Scale Environment, Part I. J. Atmos. Sci. 1974, 31, 674–701. [Google Scholar] [CrossRef]
- Flack, D.L.A.; Plant, R.S.; Gray, S.L.; Lean, H.W.; Keil, C.; Craig, G.C. Characterisation of Convective Regimes over the British Isles. Q. J. R. Meteorol. Soc. 2016, 142, 1541–1553. [Google Scholar] [CrossRef]
- Emanuel, K.A. Atmospheric Convection; Oxford University Press: Oxford, UK, 1994; p. 580. [Google Scholar]
- Done, J.; Craig, G.; Gray, S.; Clark, P.; Gray, M. Mesoscale Simulations of Organized Convection: Importance of Convective Equilibrium. Q. J. R. Meteorol. Soc. 2006, 132, 737–756. [Google Scholar] [CrossRef]
- Roberts, N.M.; Lean, H.W. Scale-Selective Verification of Rainfall Accumulations from High-Resolution Forecasts of Convective Events. Mon. Weather Rev. 2008, 136, 78–97. [Google Scholar] [CrossRef]
- Dey, S.R.A.; Leoncini, G.; Roberts, N.M.; Plant, R.S.; Migliorini, S. A Spatial View of Ensemble Spread in Convection Permitting Ensembles. Mon. Weather Rev. 2014, 142, 4091–4107. [Google Scholar] [CrossRef]
- Craig, G.C.; Keil, C.; Leuenberger, D. Constraints on the Impact of Radar Rainfall Data Assimilation on Forecasts of Cumulus Convection. Q. J. R. Meteorol. Soc. 2012, 138, 340–352. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dance, S.L.; Ballard, S.P.; Bannister, R.N.; Clark, P.; Cloke, H.L.; Darlington, T.; Flack, D.L.A.; Gray, S.L.; Hawkness-Smith, L.; Husnoo, N.; et al. Improvements in Forecasting Intense Rainfall: Results from the FRANC (Forecasting Rainfall Exploiting New Data Assimilation Techniques and Novel Observations of Convection) Project. Atmosphere 2019, 10, 125. https://doi.org/10.3390/atmos10030125
Dance SL, Ballard SP, Bannister RN, Clark P, Cloke HL, Darlington T, Flack DLA, Gray SL, Hawkness-Smith L, Husnoo N, et al. Improvements in Forecasting Intense Rainfall: Results from the FRANC (Forecasting Rainfall Exploiting New Data Assimilation Techniques and Novel Observations of Convection) Project. Atmosphere. 2019; 10(3):125. https://doi.org/10.3390/atmos10030125
Chicago/Turabian StyleDance, Sarah L., Susan P. Ballard, Ross N. Bannister, Peter Clark, Hannah L. Cloke, Timothy Darlington, David L. A. Flack, Suzanne L. Gray, Lee Hawkness-Smith, Nawal Husnoo, and et al. 2019. "Improvements in Forecasting Intense Rainfall: Results from the FRANC (Forecasting Rainfall Exploiting New Data Assimilation Techniques and Novel Observations of Convection) Project" Atmosphere 10, no. 3: 125. https://doi.org/10.3390/atmos10030125
APA StyleDance, S. L., Ballard, S. P., Bannister, R. N., Clark, P., Cloke, H. L., Darlington, T., Flack, D. L. A., Gray, S. L., Hawkness-Smith, L., Husnoo, N., Illingworth, A. J., Kelly, G. A., Lean, H. W., Li, D., Nichols, N. K., Nicol, J. C., Oxley, A., Plant, R. S., Roberts, N. M., ... Waller, J. A. (2019). Improvements in Forecasting Intense Rainfall: Results from the FRANC (Forecasting Rainfall Exploiting New Data Assimilation Techniques and Novel Observations of Convection) Project. Atmosphere, 10(3), 125. https://doi.org/10.3390/atmos10030125