
A Deep Learning Model to Predict Evapotranspiration and Relative Humidity for Moisture Control in Tomato Greenhouses


Abstract
:1. Introduction
- Development and field application of a precision measurement system for the ET modeling of crops using the Stanghellini model;
- Building deep learning models capable of the fusion of environmental data and ET data of crops for a humidity prediction model in a greenhouse; and
- Improved performance evaluation and comparison of convolutional neural network–long short-term memory (CNN-LSTM) models including various environmental data, ET information, and soil moisture content in the root-zone.
2. Materials and Methods
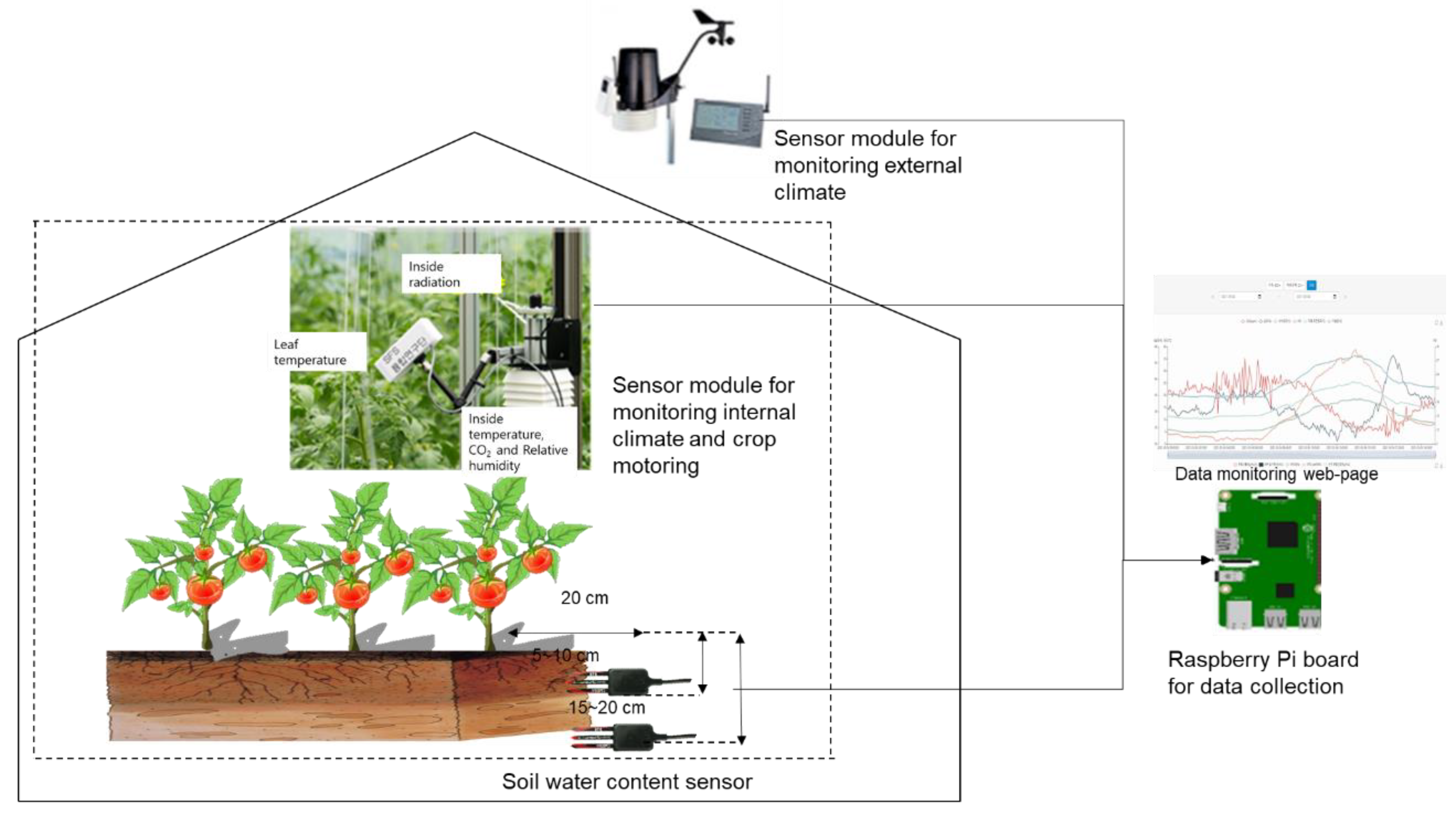
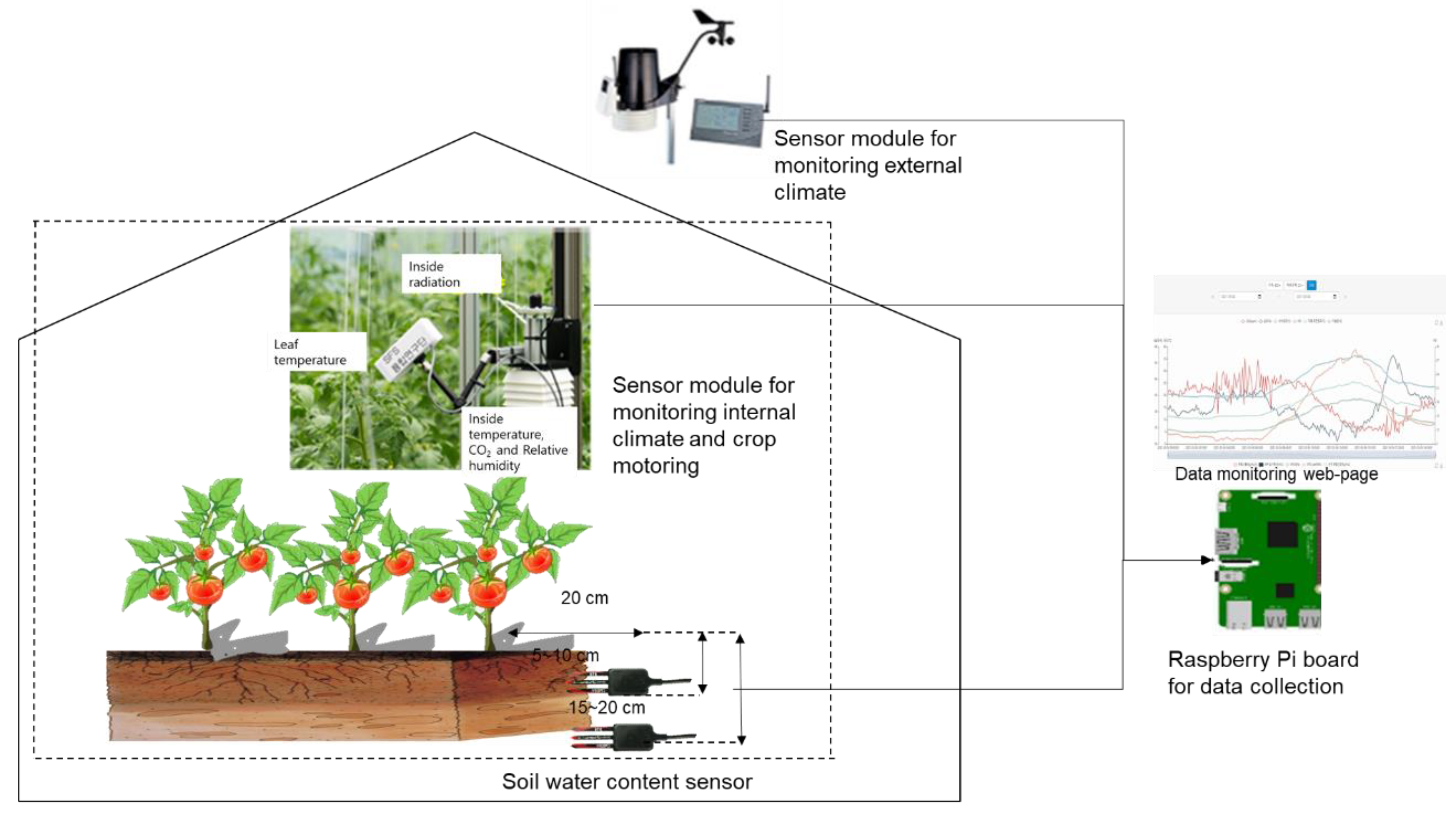
2.1. Greenhouse and Sensor Description
2.2. Development of an ET Prediction Model
2.2.1. A Prediction Model for ET in a Tomato Greenhouse
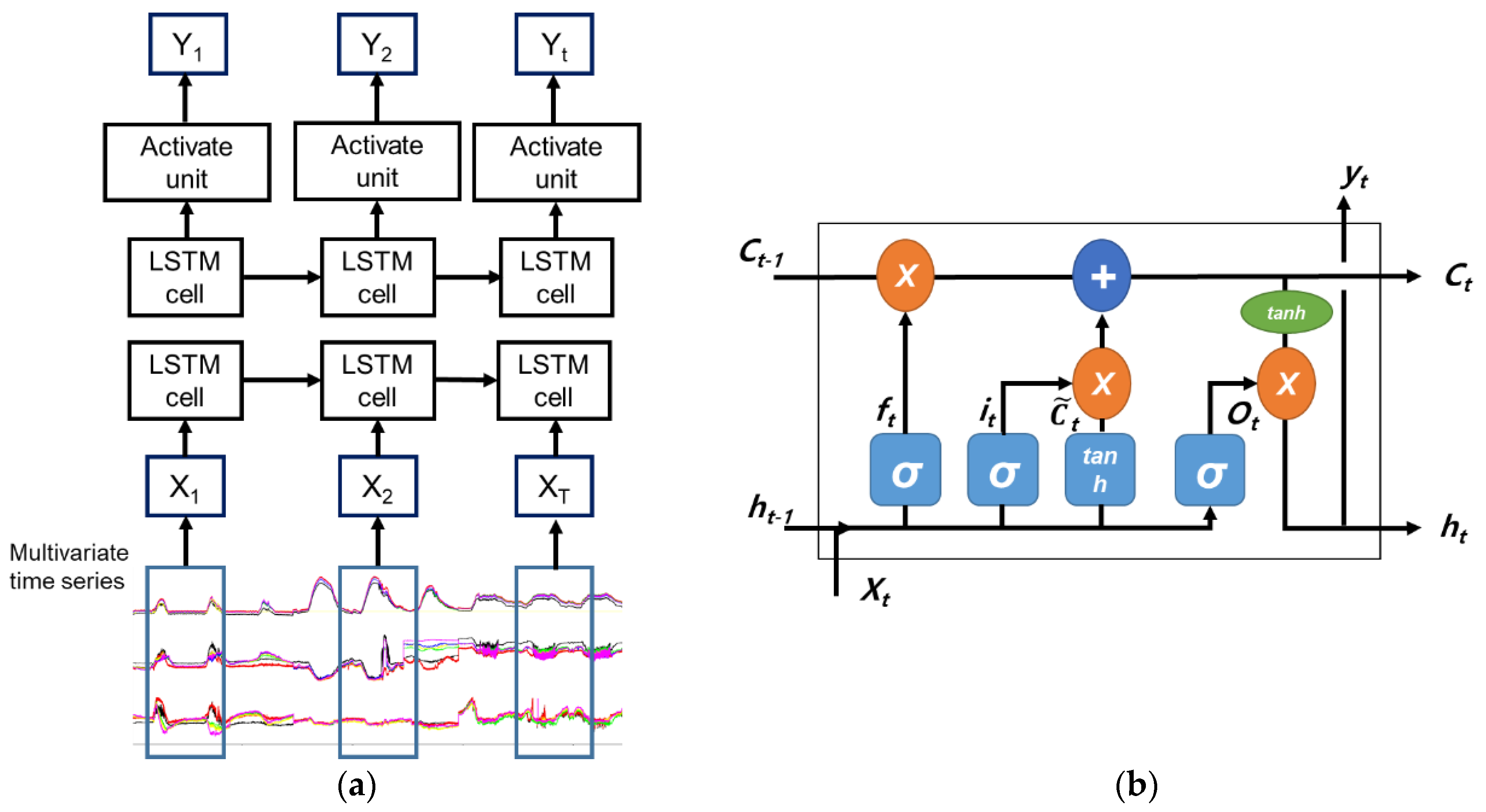
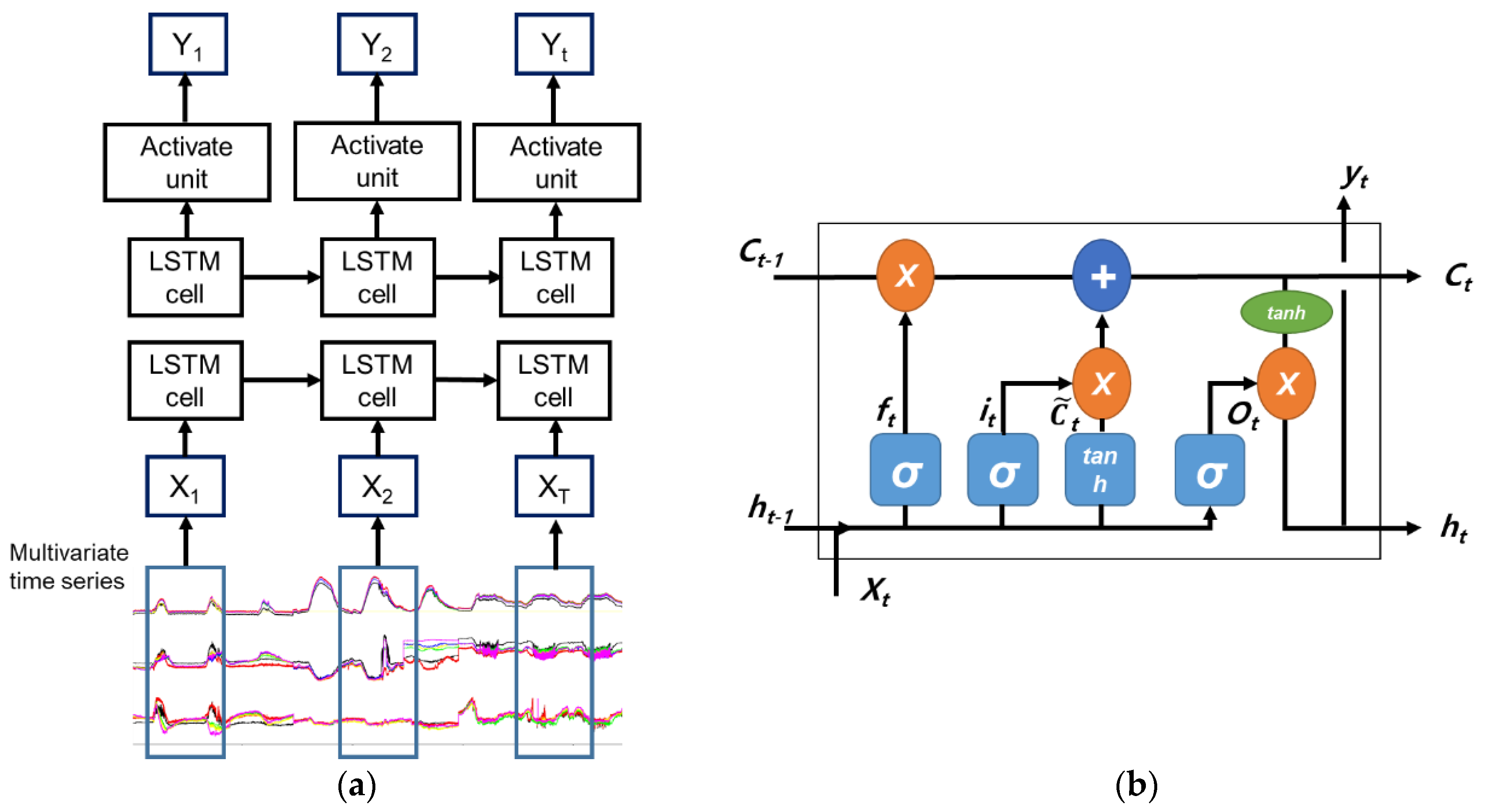
2.2.2. An LSTM-Based ET Prediction Model
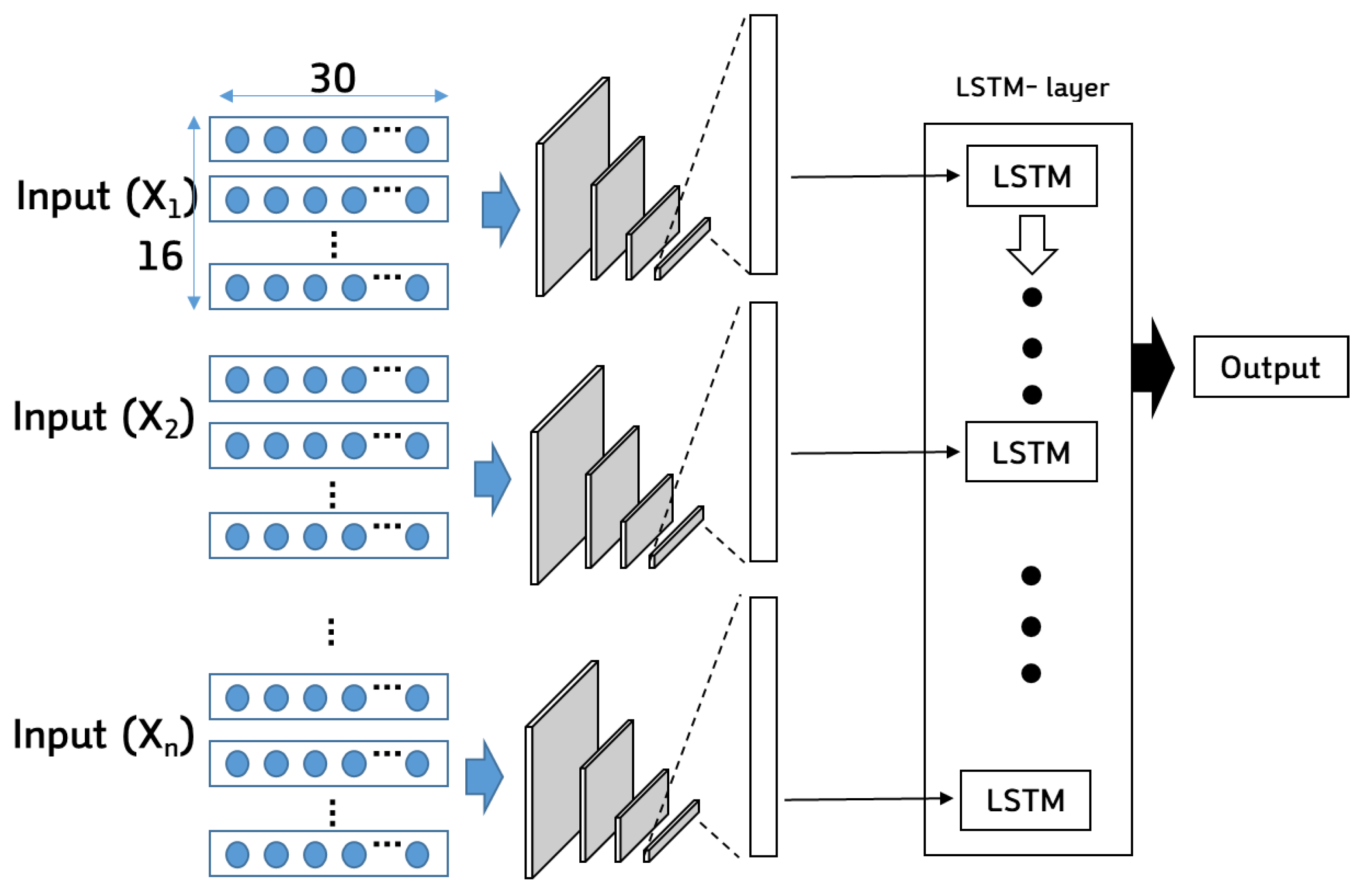
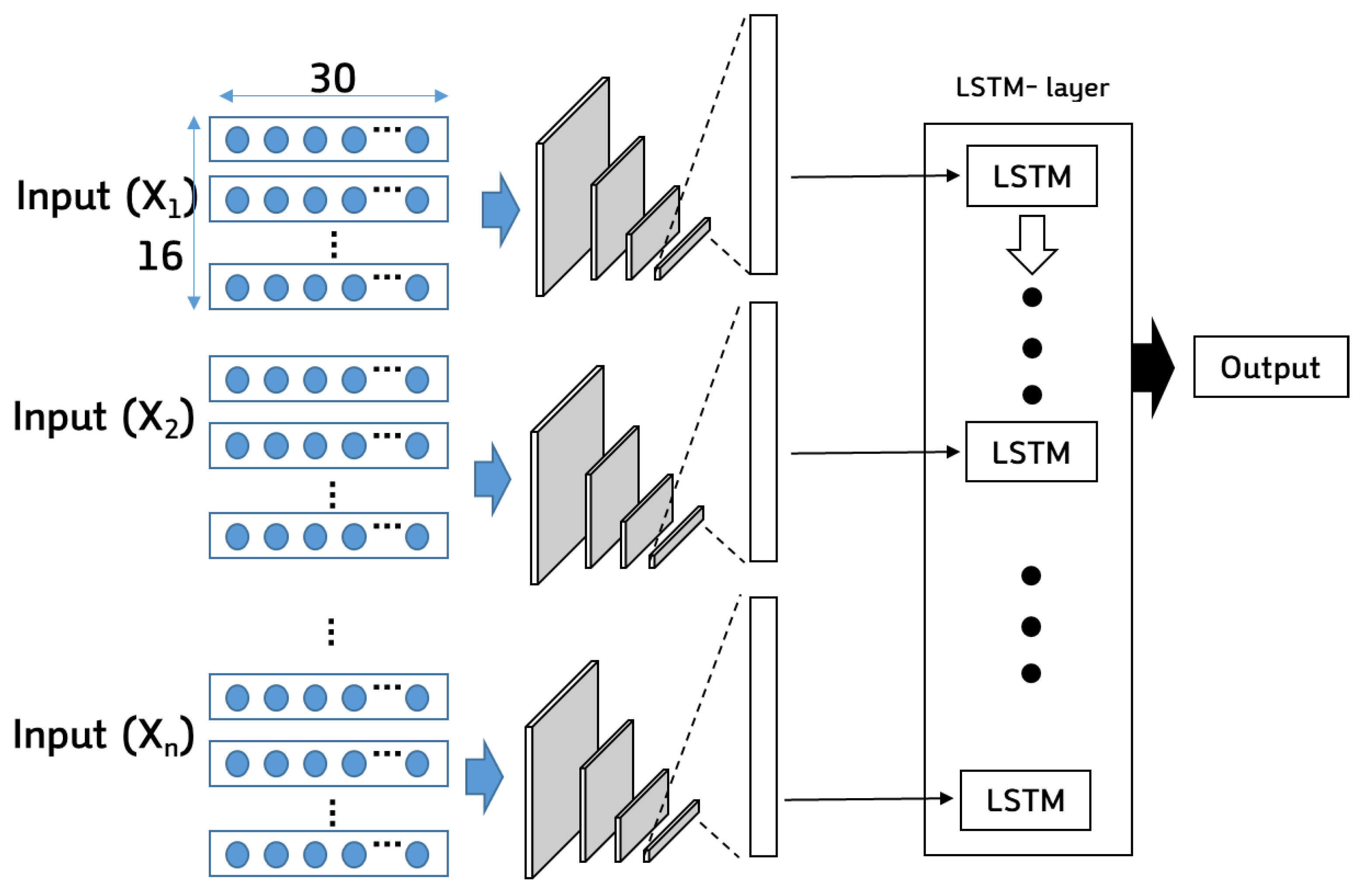
2.3. A CNN-LSTM-Based Humidity Prediction Model
3. Results
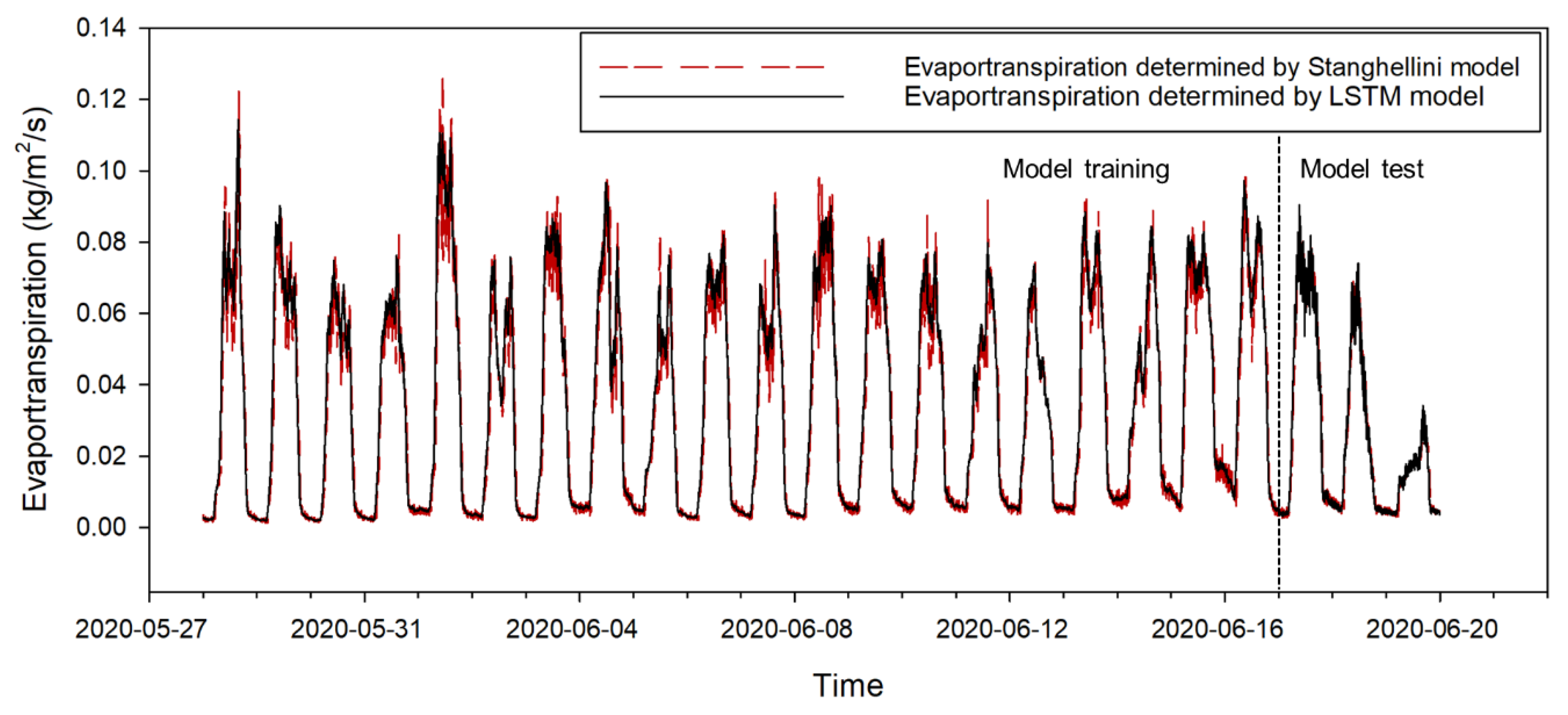
3.1. Comparison of ET Prediction Model Outcomes
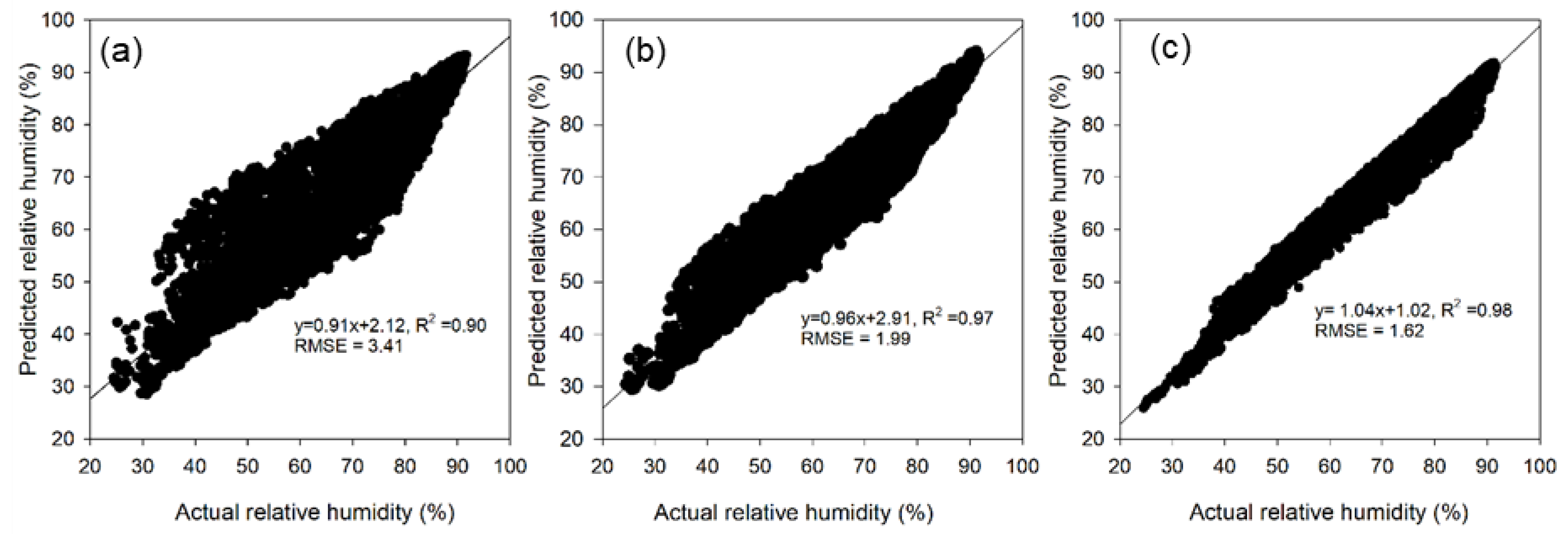
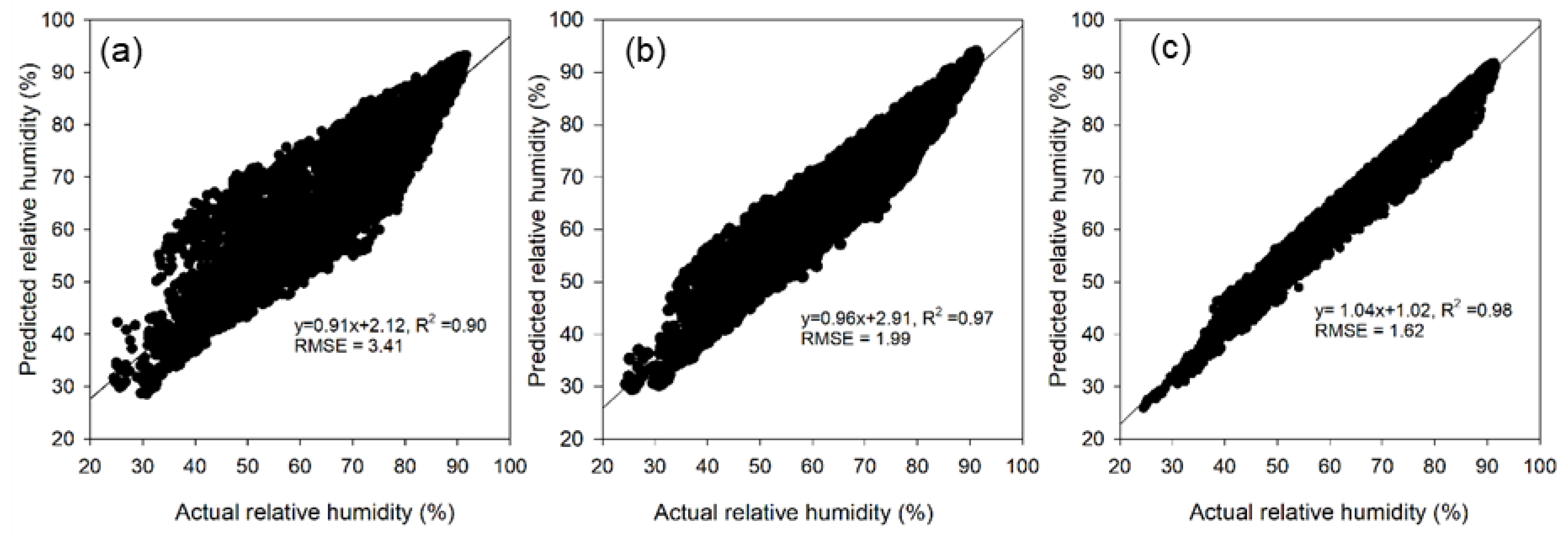
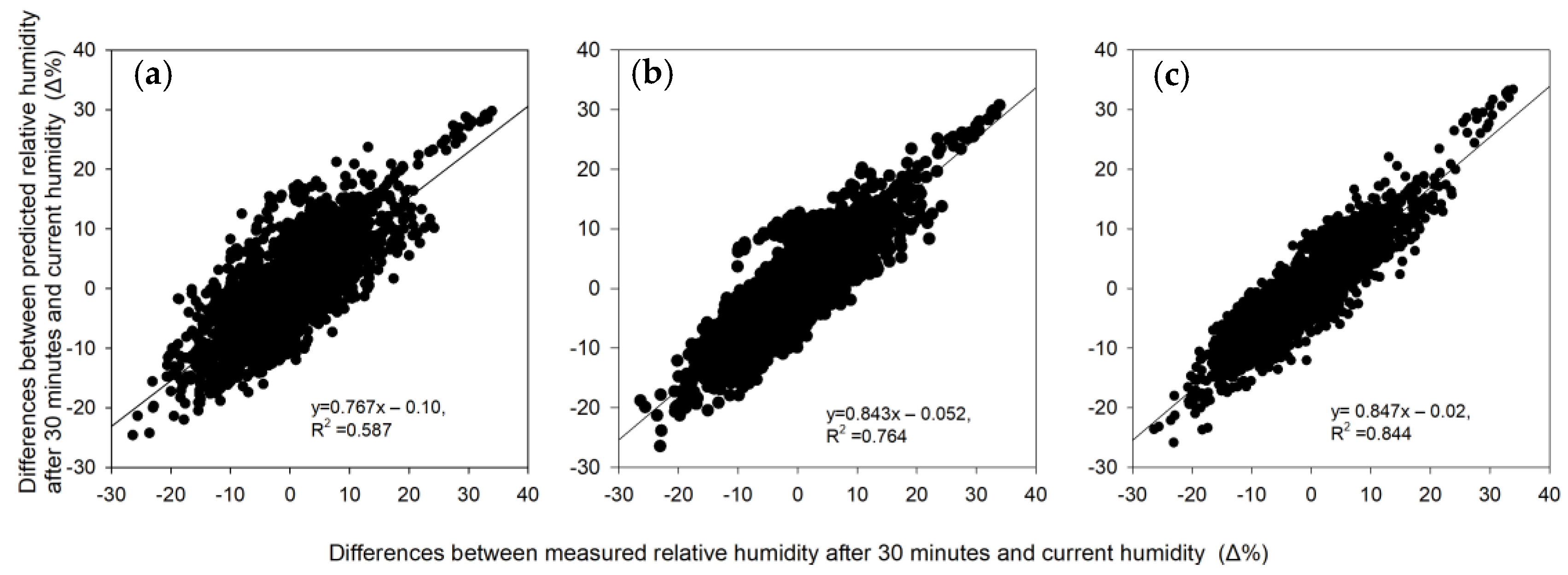
3.2. Comparison of Humidity Prediction Model Outcomes
4. Discussion
5. Conclusions
- An ET prediction model was developed through LSTM modeling using time series data. For this, the crop root-zone and leaf temperature sensors were additionally installed to apply the Stanghellini model. The ET data from the Stanghellini model were used in the training of the LSTM model. The training set contained the data of 20 days and the test set contained the data of 3 days, for subsequent comparison with the Stanghellini model outcomes. In training, the RMSE for the two values was 0.00317 kgm−2 s−1, and the RMSE for the predicted values after applying the model to the test set was 0.00356 kgm−2 s−1. The errors indicated by %SEP were 5.76 and 6.45%, respectively.
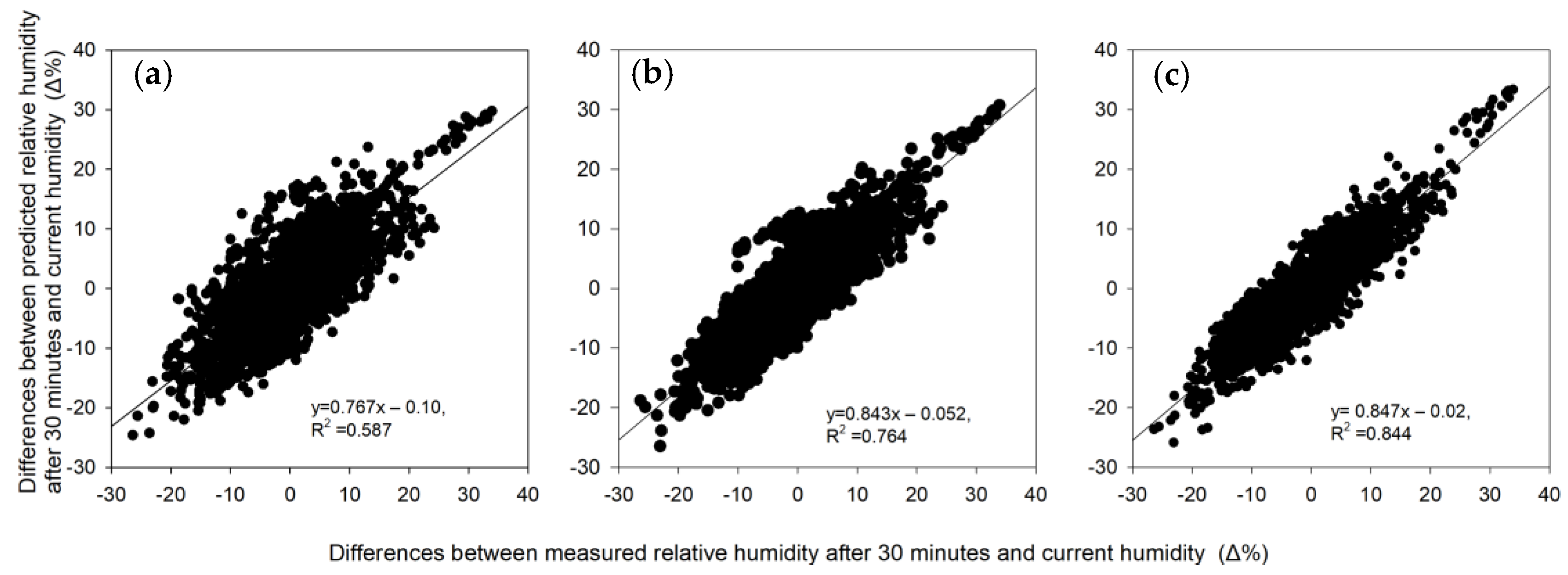
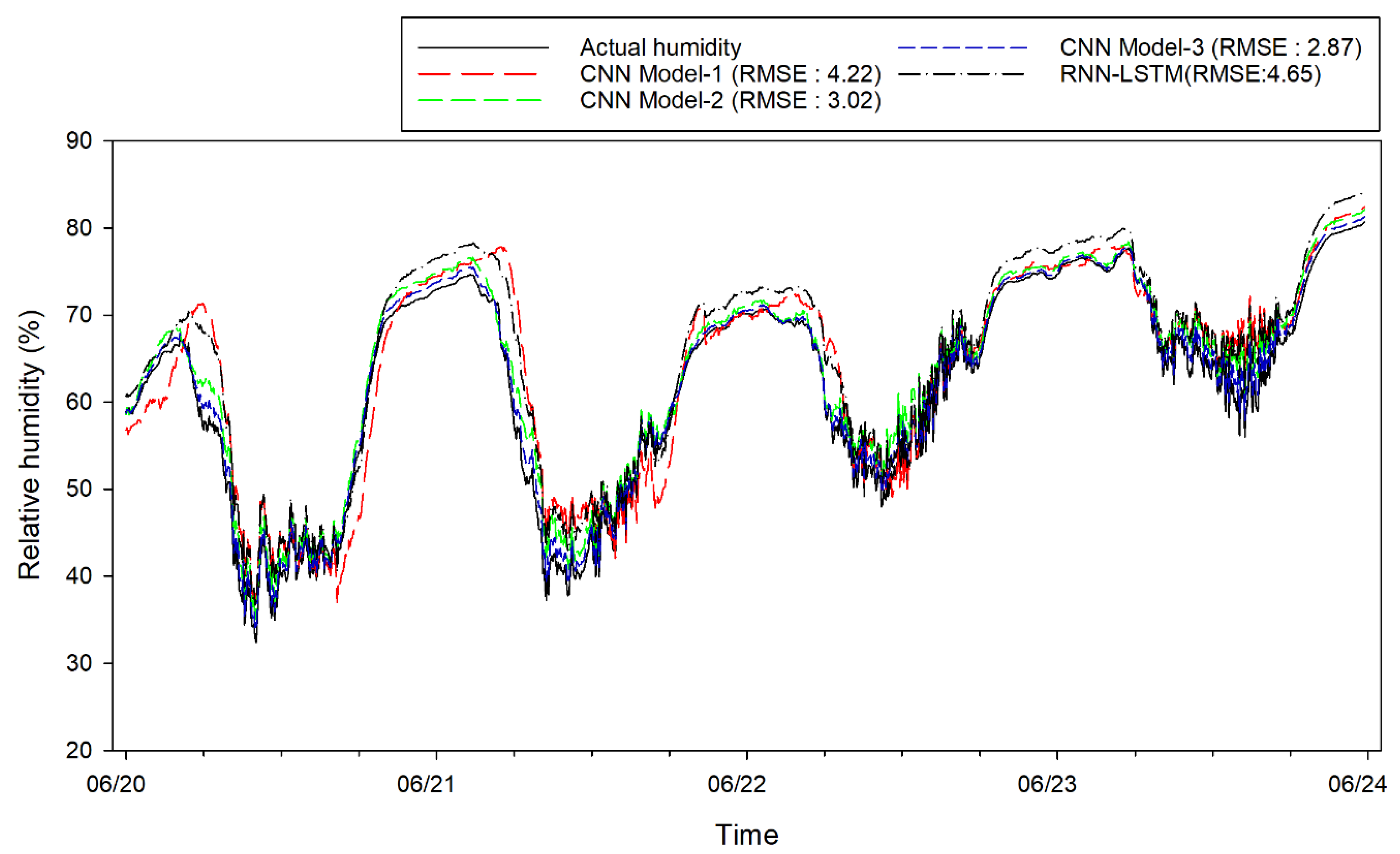
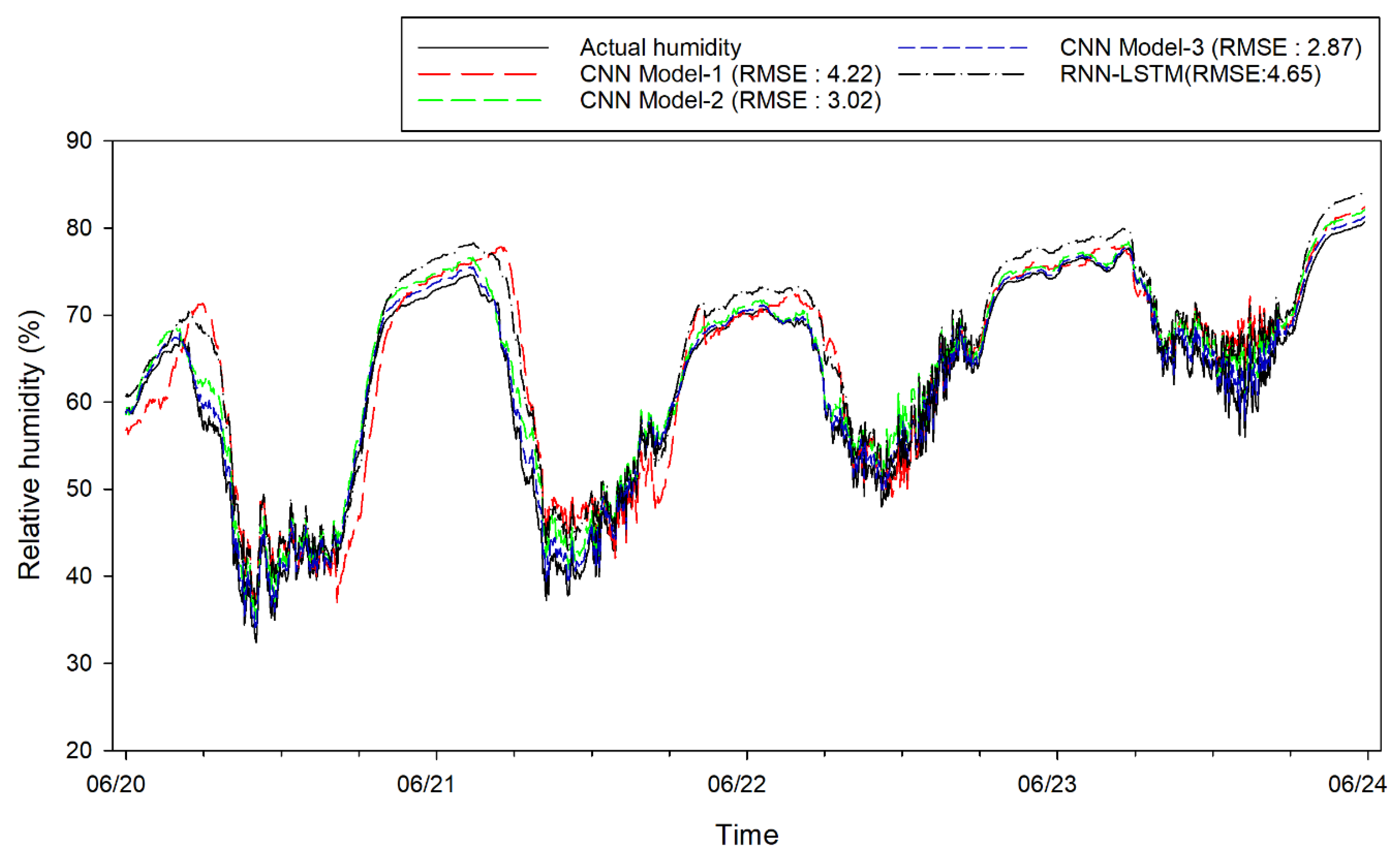
- A humidity prediction model was developed to predict the current change in humidity inside the greenhouse, i.e., the humidity 30 min into the future. The input data included the various greenhouse environmental data, the history of actuator operation, the ET, the soil sensor, and crop environment data, which were fed as multiple variables to the 2D CNN structure via the convolution layer in continuous time. This was connected to the LSTM structure to finalize the modeling. The results showed that the RMSE for the predicted values of the test set was 2.87, confirming a better level of performance than the conventional RNN-LSTM model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, F.; Ma, C. Modeling Greenhouse Air Humidity by Means of Artificial Neural Network and Principal Component Analysis. Comput. Electron. Agric. 2010, 71, S19–S23. [Google Scholar] [CrossRef]
- El Ghoumari, M.Y.; Tantau, H.J.; Serrano, J. Non-Linear Constrained MPC: Real-Time Implementation of Greenhouse Air Temperature Control. Comput. Electron. Agric. 2005, 49, 345–356. [Google Scholar] [CrossRef]
- Seginer, I.; McClendon, R.W. Methods for Optimal Control of the Greenhouse Environment. Trans. ASAE 1992, 35, 1299–1307. [Google Scholar] [CrossRef]
- Jung, D.-H.; Kim, H.S.; Jhin, C.; Kim, H.-J.; Park, S.H. Time-Serial Analysis of Deep Neural Network Models for Prediction of Climatic Conditions inside a Greenhouse. Comput. Electron. Agric. 2020, 173, 105402. [Google Scholar] [CrossRef]
- Castañeda-Miranda, A.; Castaño, V.M. Smart Frost Control in Greenhouses by Neural Networks Models. Comput. Electron. Agric. 2017, 137, 102–114. [Google Scholar] [CrossRef]
- Ferreira, P.M.; Faria, E.A.; Ruano, A.E. Neural Network Models in Greenhouse Air Temperature Prediction. Neurocomputing 2002, 43, 51–75. [Google Scholar] [CrossRef]
- Hongkang, W.; Li, L.; Yong, W.; Fanjia, M.; Haihua, W.; Sigrimis, N.A. Recurrent Neural Network Model for Prediction of Microclimate in Solar Greenhouse. IFAC-PapersOnLine 2018, 51, 790–795. [Google Scholar] [CrossRef]
- Anapalli, S.S.; Ahuja, L.R.; Gowda, P.H.; Ma, L.; Marek, G.; Evett, S.R.; Howell, T.A. Simulation of Crop Evapotranspiration and Crop Coefficients with Data in Weighing Lysimeters. Agric. Water Manag. 2016, 177, 274–283. [Google Scholar] [CrossRef]
- Chen, J.; Xu, F.; Tan, D.; Shen, Z.; Zhang, L.; Ai, Q. A Control Method for Agricultural Greenhouses Heating Based on Computational Fluid Dynamics and Energy Prediction Model. Appl. Energy 2015, 141, 106–118. [Google Scholar] [CrossRef]
- Chiew, F.H.S.; Kamaladasa, N.N.; Malano, H.M.; McMahon, T.A. Penman-Monteith, FAO-24 Reference Crop Evapotranspiration and Class-A Pan Data in Australia. Agric. Water Manag. 1995, 28, 9–21. [Google Scholar] [CrossRef]
- Beven, K. A Sensitivity Analysis of the Penman-Monteith Actual Evapotranspiration Estimates. J. Hydrol. 1979, 44, 169–190. [Google Scholar] [CrossRef]
- Katsoulas, N.; Stanghellini, C. Modelling Crop Transpiration in Greenhouses: Different Models for Different Applications. Agronomy 2019, 9, 392. [Google Scholar] [CrossRef]
- Stanghellini, C. Transpiration of Greenhouse Crops: An Aid to Climate Management; Agricultural University: Wageningen, The Netherlands, 1987. [Google Scholar]
- Dae-Hyun, J. Development of Artificial Intelligence-Based Climate Control System for Smart Greenhouse. Ph.D. Thesis, Seoul National University, Seoul, Korea, August 2020. [Google Scholar]
- Yan, H.; Huang, S.; Zhang, C.; Gerrits, M.C.; Wang, G.; Zhang, J.; Zhao, B.; Acquah, S.J.; Wu, H.; Fu, H. Parameterization and Application of Stanghellini Model for Estimating Greenhouse Cucumber Transpiration. Water 2020, 12, 517. [Google Scholar] [CrossRef]
- Villarreal-Guerrero, F.; Kacira, M.; Fitz-Rodríguez, E.; Kubota, C.; Giacomelli, G.A.; Linker, R.; Arbel, A. Comparison of Three Evapotranspiration Models for a Greenhouse Cooling Strategy with Natural Ventilation and Variable High Pressure Fogging. Sci. Hortic. 2012, 134, 210–221. [Google Scholar] [CrossRef]
- Orgaz, F.; Fernández, M.D.; Bonachela, S.; Gallardo, M.; Fereres, E. Evapotranspiration of Horticultural Crops in an Unheated Plastic Greenhouse. Agric. Water Manag. 2005, 72, 81–96. [Google Scholar] [CrossRef]
- Villarreal-Guerrero, F.; Kacira, M.; Fitz-Rodríguez, E.; Linker, R.; Kubota, C.; Giacomelli, G.A.; Arbel, A. Simulated Performance of a Greenhouse Cooling Control Strategy with Natural Ventilation and Fog Cooling. Biosyst. Eng. 2012, 111, 217–228. [Google Scholar] [CrossRef]
- Stanghellini, C. Environmental Control of Greenhouse Crop Transpiration. J. Agric. Eng. Res. 1992, 51, 297–311. [Google Scholar] [CrossRef]
- Pahuja, R.; Verma, H.K.; Uddin, M. An Intelligent Wireless Sensor and Actuator Network System for Greenhouse Microenvironment Control and Assessment. J. Biosyst. Eng. 2017, 42, 23–43. [Google Scholar] [CrossRef]
- Pahuja, R.; Verma, H.K.; Uddin, M. Implementation of Greenhouse Climate Control Simulator Based on Dynamic Model and Vapor Pressure Deficit Controller. Eng. Agric. Environ. Food 2015, 8, 273–288. [Google Scholar] [CrossRef]
- Taki, M.; Ajabshirchi, Y.; Ranjbar, S.F.; Rohani, A.; Matloobi, M. Heat Transfer and MLP Neural Network Models to Predict inside Environment Variables and Energy Lost in a Semi-Solar Greenhouse. Energy Build. 2016, 110, 314–329. [Google Scholar] [CrossRef]
- Jung, D.-H.; Kim, H.-J.; Kim, S.H.; Choi, J.; Kim, D.J.; Park, H.S. Fusion of Spectroscopy and Cobalt Electrochemistry Data for Estimating Phosphate Concentration in Hydroponic Solution. Sensors 2019, 19, 2596. [Google Scholar] [CrossRef] [PubMed]
- Zou, W.; Yao, F.; Zhang, B.; He, C.; Guan, Z. Verification and Predicting Temperature and Humidity in a Solar Greenhouse Based on Convex Bidirectional Extreme Learning Machine Algorithm. Neurocomputing 2017, 249, 72–85. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, L.; Yu, Z.; Liu, H.; Zhang, L.; Gong, X.; Sun, H. Prediction of Greenhouse Tomato Crop Evapotranspiration Using XGBoost Machine Learning Model. Plants 2022, 11, 1923. [Google Scholar] [CrossRef]
- Shin, J.H.; Park, J.S.; Son, J.E. Estimating the Actual Transpiration Rate with Compensated Levels of Accumulated Radiation for the Efficient Irrigation of Soilless Cultures of Paprika Plants. Agric. Water Manag. 2014, 135, 9–18. [Google Scholar] [CrossRef]
- Meftah, O.; Guergueb, Z.; Braham, M.; Sayadi, S.; Mekki, A. Long Term Effects of Olive Mill Wastewaters Application on Soil Properties and Phenolic Compounds Migration under Arid Climate. Agric. Water Manag. 2019, 212, 119–125. [Google Scholar] [CrossRef]
- Liu, H.; Sun, J.S.; Duan, A.W.; Sun, L.; Liang, Y.Y. Simple Model for Tomato and Green Pepper Leaf Area Based on AutoCAD Software. Chin. Agric. Sci. Bull. 2009, 25, 287–293. [Google Scholar]
- Gong, X.; Qiu, R.; Zhang, B.; Wang, S.; Ge, J.; Gao, S.; Yang, Z. Energy Budget for Tomato Plants Grown in a Greenhouse in Northern China. Agric. Water Manag. 2021, 255, 107039. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Tawegoum, R.; Teixeira, R.; Chasseriaux, G. Simulation of Humidity Control and Greenhouse Temperature Tracking in a Growth Chamber Using a Passive Air Conditioning Unit. Control Eng. Pract. 2006, 14, 853–861. [Google Scholar] [CrossRef]
- Körner, O.; Challa, H. Process-Based Humidity Control Regime for Greenhouse Crops. Comput. Electron. Agric. 2003, 39, 173–192. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, H.; Zhang, S.; Wang, Y.; Chow, D. Modeling and Optimization of Environment in Agricultural Greenhouses for Improving Cleaner and Sustainable Crop Production. J. Clean. Prod. 2021, 285, 124843. [Google Scholar] [CrossRef]
- Stanghellini, C.; de Jong, T. A Model of Humidity and Its Applications in a Greenhouse. Agric. For. Meteorol. 1995, 76, 129–148. [Google Scholar] [CrossRef]
- González Perea, R.; Camacho Poyato, E.; Montesinos, P.; Rodríguez Díaz, J.A. Optimisation of Water Demand Forecasting by Artificial Intelligence with Short Data Sets. Biosyst. Eng. 2019, 177, 59–66. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables (Unit) | Min–Max |
|---|---|
| Outside temperature (°C) | 15.5–29.9 |
| Outside humidity (%) | 41.5–100 |
| Outside CO2 concentration (ppm) | 355.2–443.0 |
| Radiation (W/m2) | 0–1355.4 |
| Wind speed (m/s) | 0–3.81 |
| Shade curtain (%) | 0–100 |
| Circulating Fan | 0 or 1 |
| Heating valve (%) | 0–100 |
| Fogging | 0 or 1 |
| CO2 injection | 0 or 1 |
| Heat retention curtain (%) | 55–100 |
| Soil temperature (°C) | 14.6–30.1 |
| Left and right window openness (%) | 0–100 |
| Wind direction (°) | 0–359 |
| Inside humidity (%) | 36.1–99.1 |
| Inside CO2 concentration (ppm) | 351.2–1124.6 |
| Inside temperature (°C) | 19.6–35.1 |
| Leaf temperature (°C) | 16.5–33.6 |
| Volumetric water contents of soil (%) | 5.53–38.5 |
| Symbol | Variables | Unit |
|---|---|---|
| E | Evapotranspiration rate | Kg/s ∙ m2∙canopy area |
| Tair | Ambient air temperature | °C |
| To | Temperature at the leaf surface | °C |
| RH | Relative humidity | % |
| Is | Shortwave irradiance | W/m2 |
| LAI | Leaf area index; the ratio of the total leaf area (one side) to the canopy area, 2.5–3.5 in this study | m2/m2 |
| L | Latent heat of the vaporization of water, 2,502,535.239–2385.76 ∙ Tair | J/kg |
| ρa | Air density, 100,000/287∙(Tair + 273.16) | Kg/m3 |
| cp | Air specific heat at constant pressure, 1013 | J/kg/°C |
| δ | Slope of the saturation vapor pressure–temperature curve, 41.45 exp(0.06088 ∙ Tair) | Pa/°C |
| γ | Psychometric constant, | Pa/°C |
| Atmospheric pressure, 101,325 | Pa | |
| h | Elevation above sea level, 70 m | |
| ri | Internal resistance of the canopy to vapor transfer | S/m |
| re | External resistance of the canopy to sensible heat transfer, is the friction velocity (m·s−1) | |
| Th | Apparent temperature of the ambient environment as determined by the pipe, floor, and cladding temperature, Tair | |
| rR | Linearization factor of the radiation heat flux equation, | |
| σ | Stefan–Boltzmann constant, 5.669 × 10−8 | J/K4/m2/s |
| ea* | Saturation vapor pressure at mean air temperature, | Pa |
| ea | Vapor pressure at air temperature, | Pa |
| CNN Models | Input Data |
|---|---|
| Model-1 | Micro-climate sensor of inside the greenhouse, external weather information, and operation signals of actuators inside the greenhouse. |
| Model-2 | A dataset with evapotranspiration information added to the dataset of Model-1. |
| Model-3 | A dataset with tomato leaf temperature sensor and soil moisture sensor, leaf vapor-pressure deficit, and dew points added to Model-1. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, D.-H.; Lee, T.S.; Kim, K.; Park, S.H. A Deep Learning Model to Predict Evapotranspiration and Relative Humidity for Moisture Control in Tomato Greenhouses. Agronomy 2022, 12, 2169. https://doi.org/10.3390/agronomy12092169
Jung D-H, Lee TS, Kim K, Park SH. A Deep Learning Model to Predict Evapotranspiration and Relative Humidity for Moisture Control in Tomato Greenhouses. Agronomy. 2022; 12(9):2169. https://doi.org/10.3390/agronomy12092169
Chicago/Turabian StyleJung, Dae-Hyun, Taek Sung Lee, KangGeon Kim, and Soo Hyun Park. 2022. "A Deep Learning Model to Predict Evapotranspiration and Relative Humidity for Moisture Control in Tomato Greenhouses" Agronomy 12, no. 9: 2169. https://doi.org/10.3390/agronomy12092169
APA StyleJung, D.-H., Lee, T. S., Kim, K., & Park, S. H. (2022). A Deep Learning Model to Predict Evapotranspiration and Relative Humidity for Moisture Control in Tomato Greenhouses. Agronomy, 12(9), 2169. https://doi.org/10.3390/agronomy12092169