
Simulation Parameter Calibration and Test of Typical Pear Varieties Based on Discrete Element Method


Abstract
:1. Introduction
2. Materials and Methods
2.1. Model Establishment
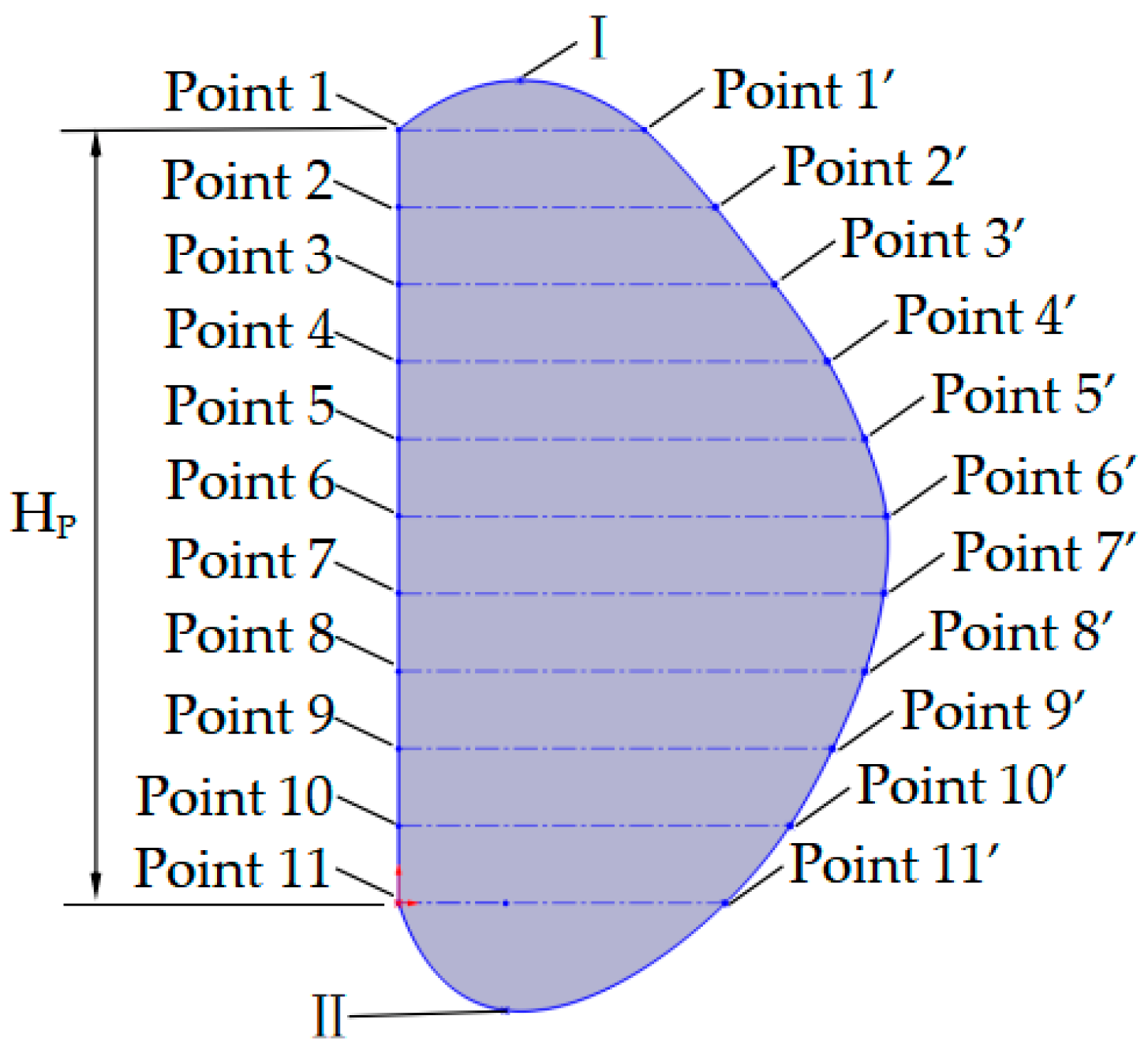
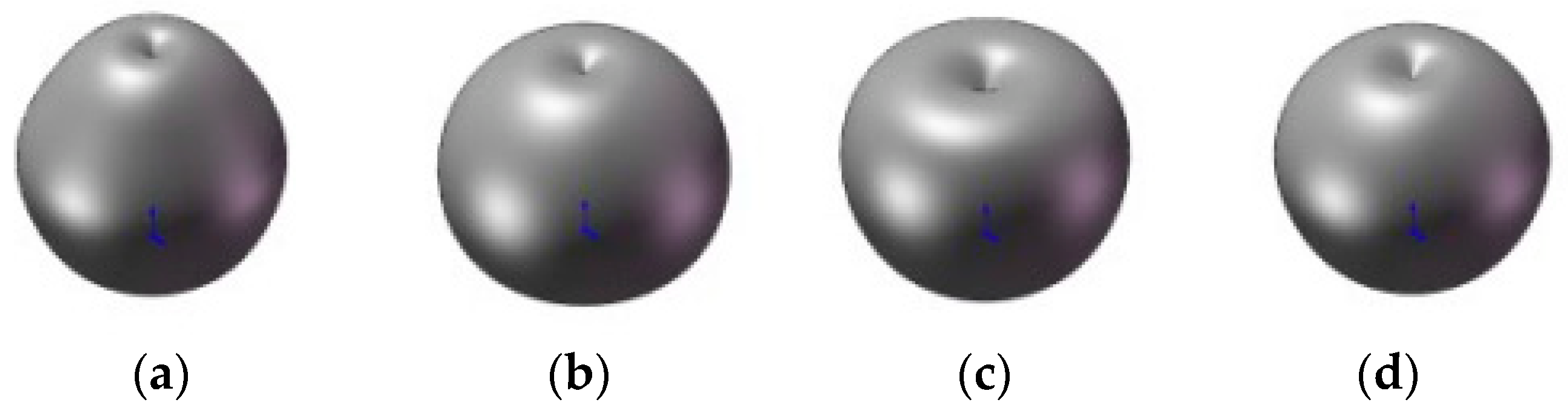
2.1.1. Physical Model of Pears
2.1.2. Selection of Contact Model
2.2. Calibration of Contact Parameters between Typical Pears and Materials
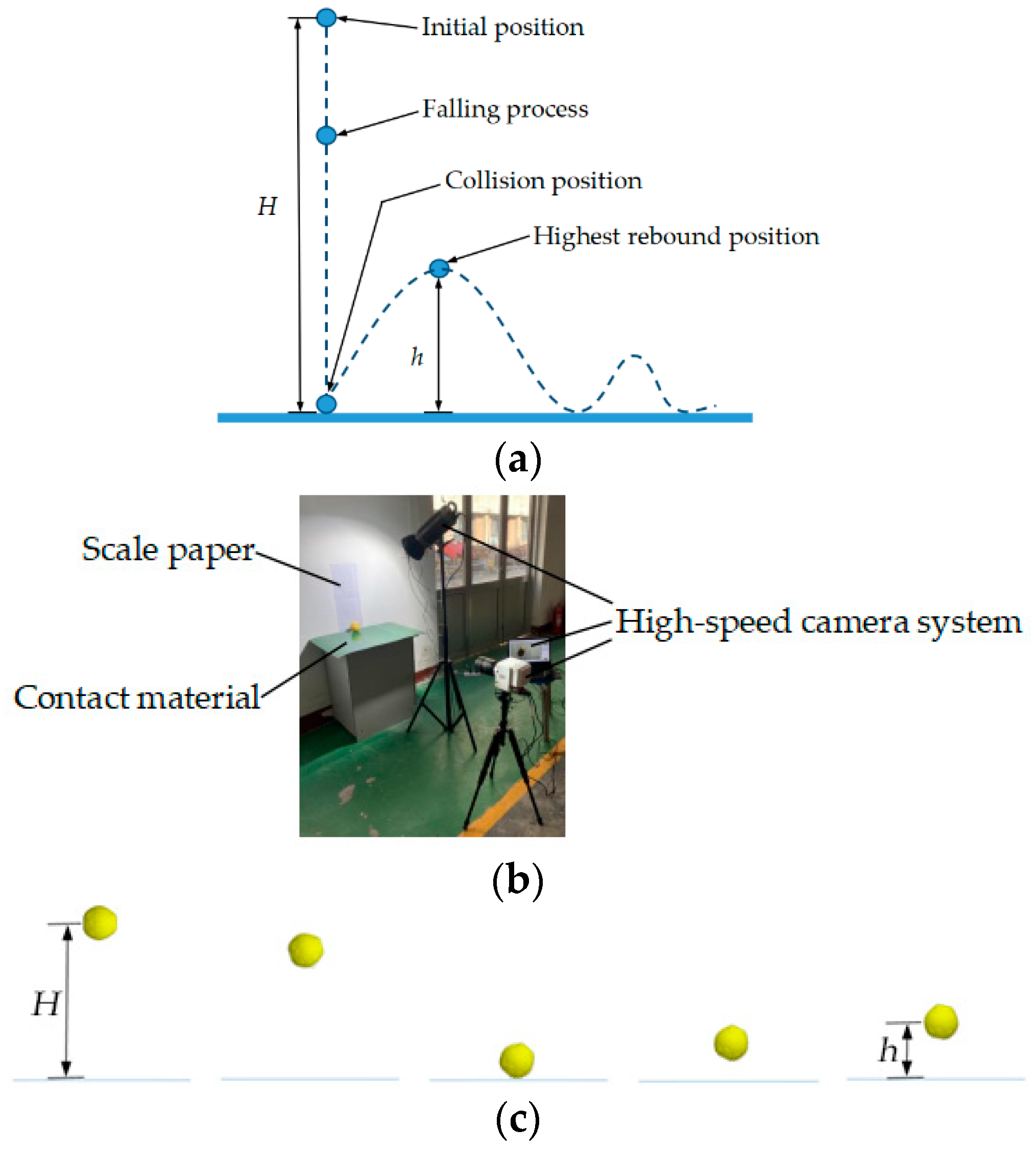
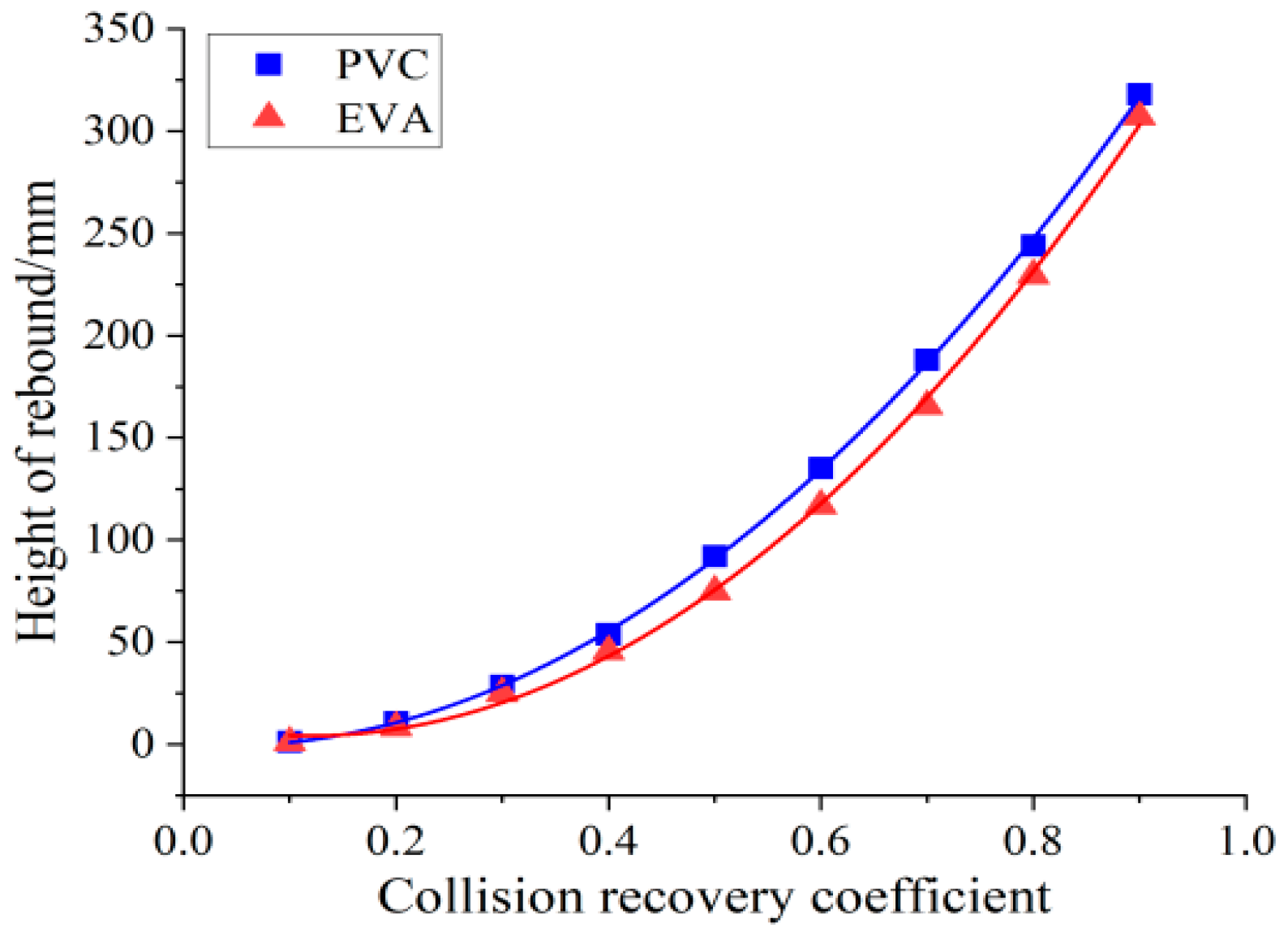
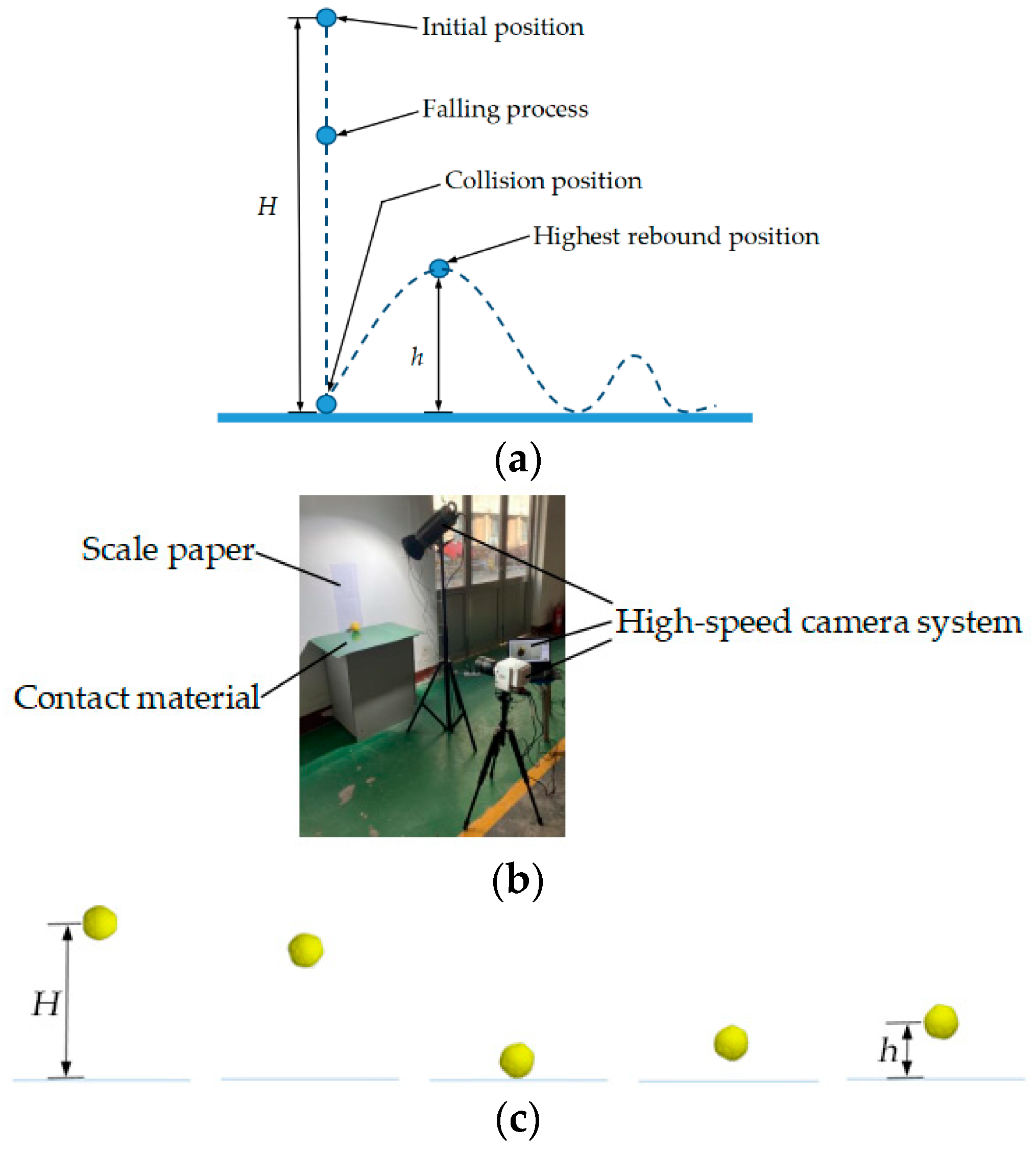
2.2.1. Calibration of Collision Recovery Coefficient between Typical Pears and Materials
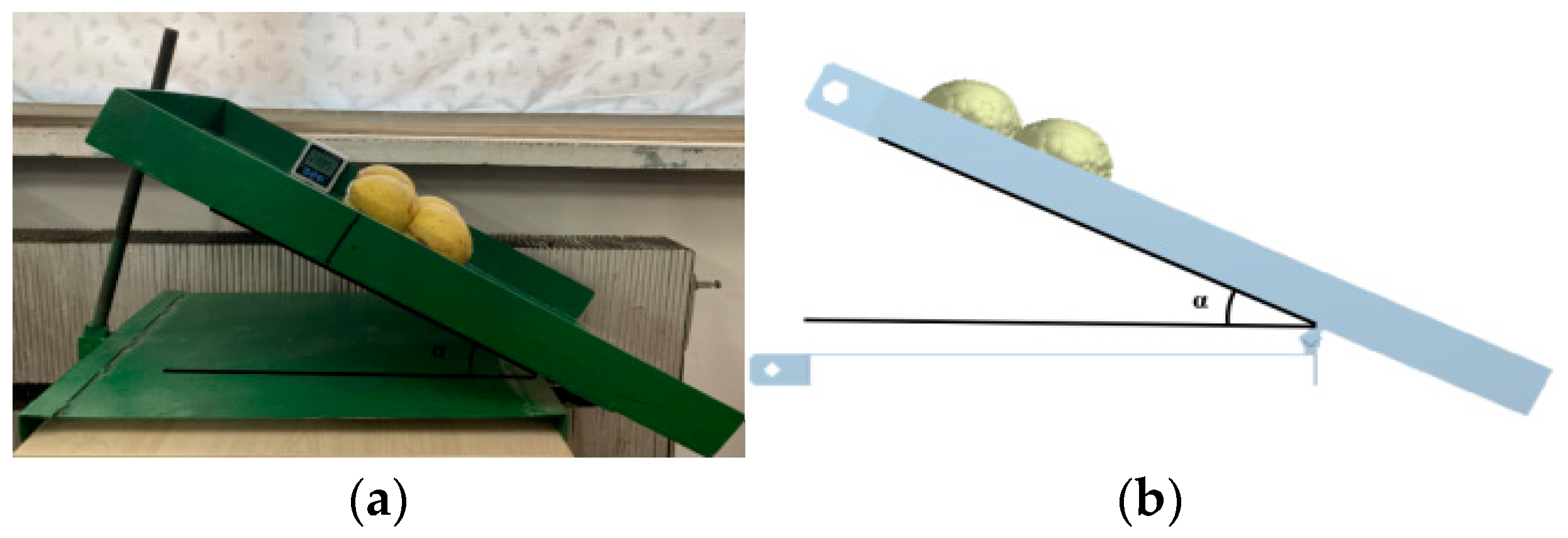
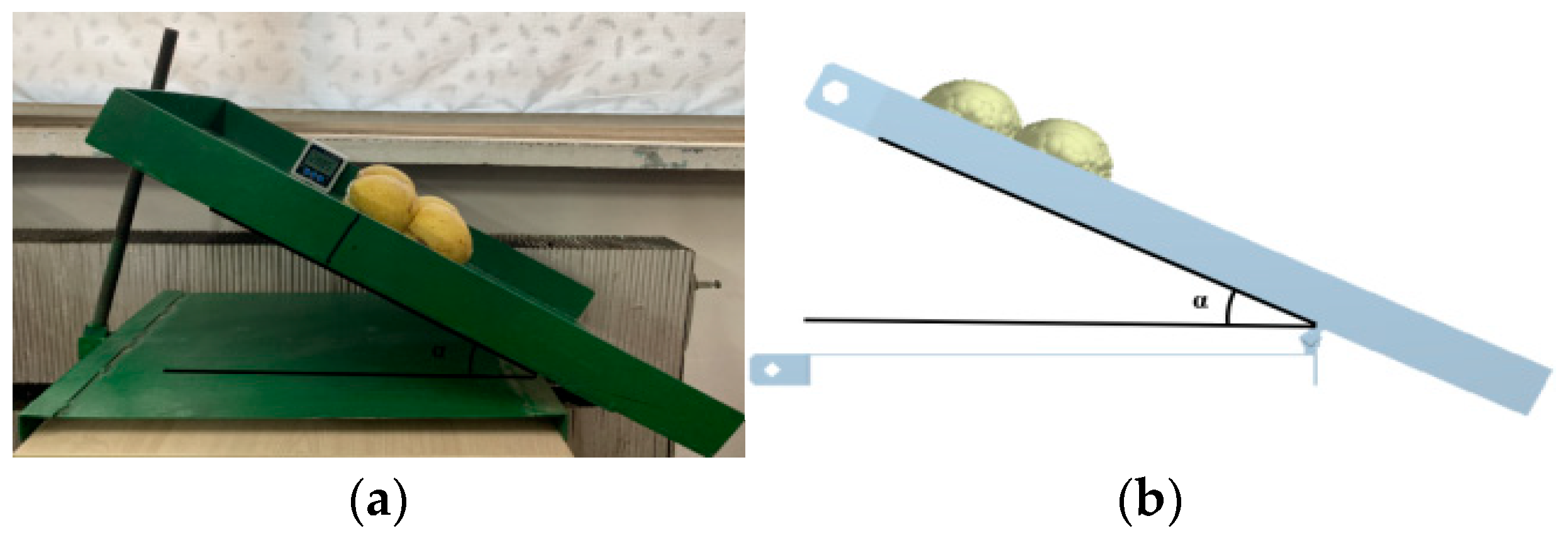
2.2.2. Calibration of Static Friction Coefficient between Typical Pears and Materials
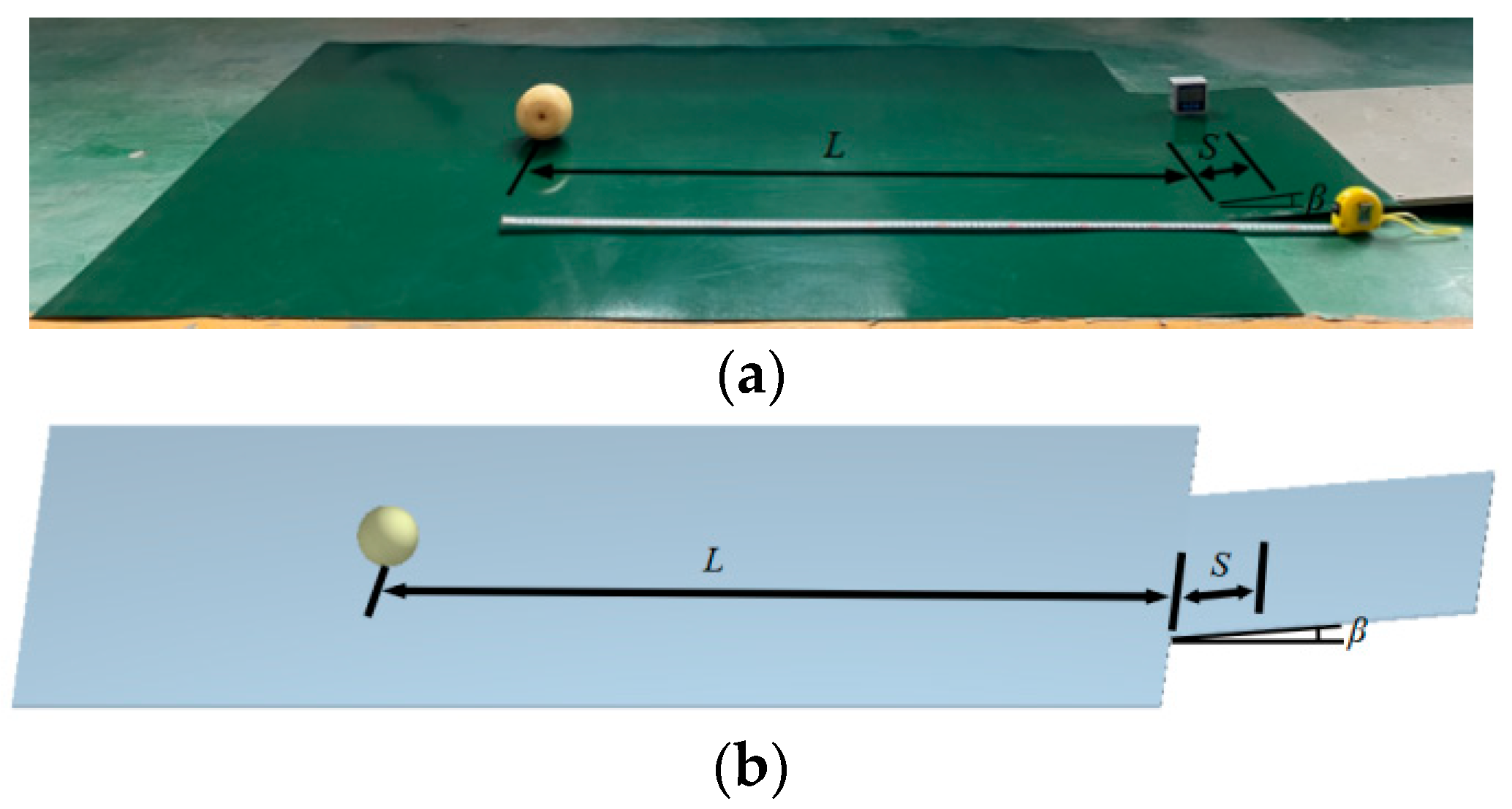
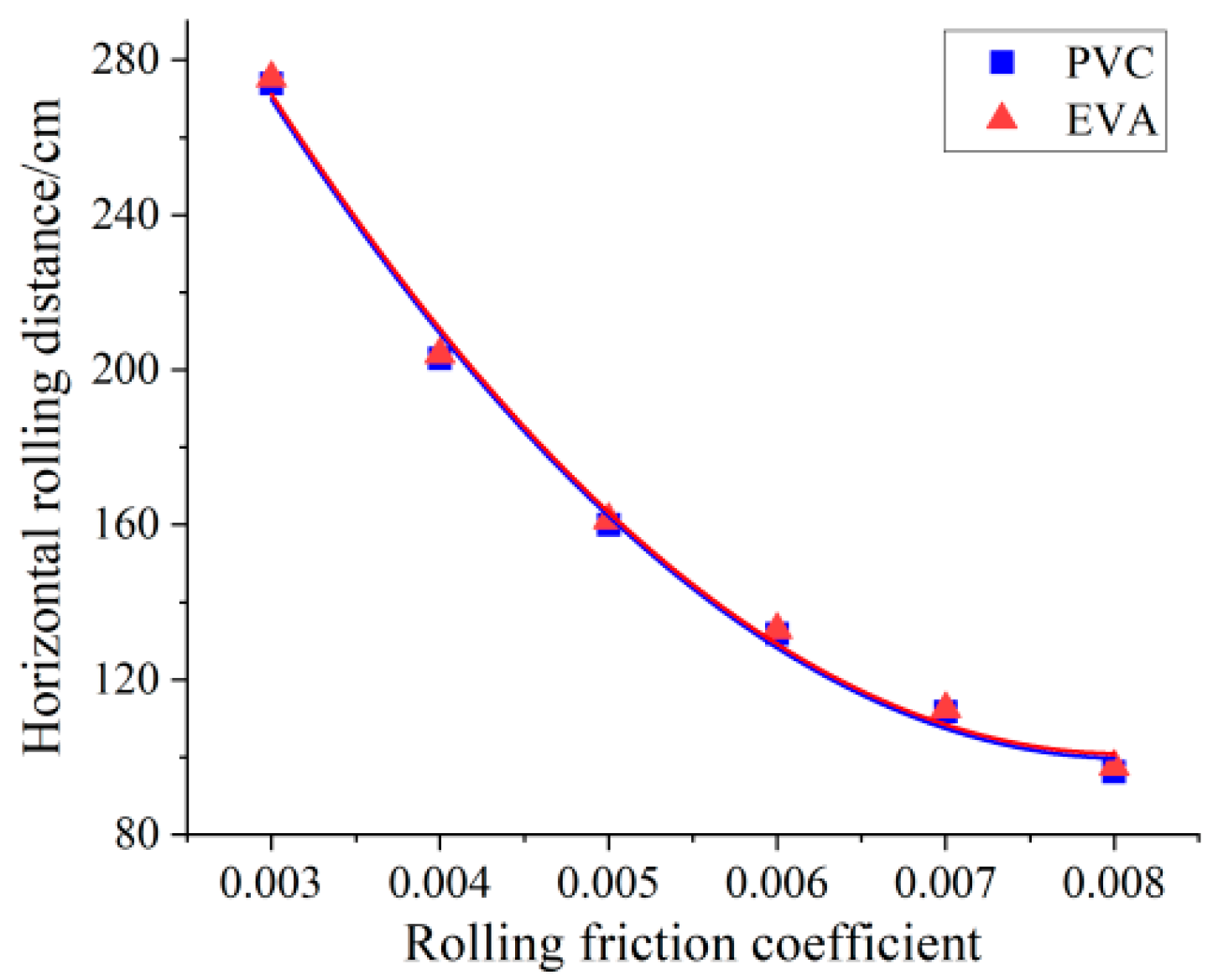
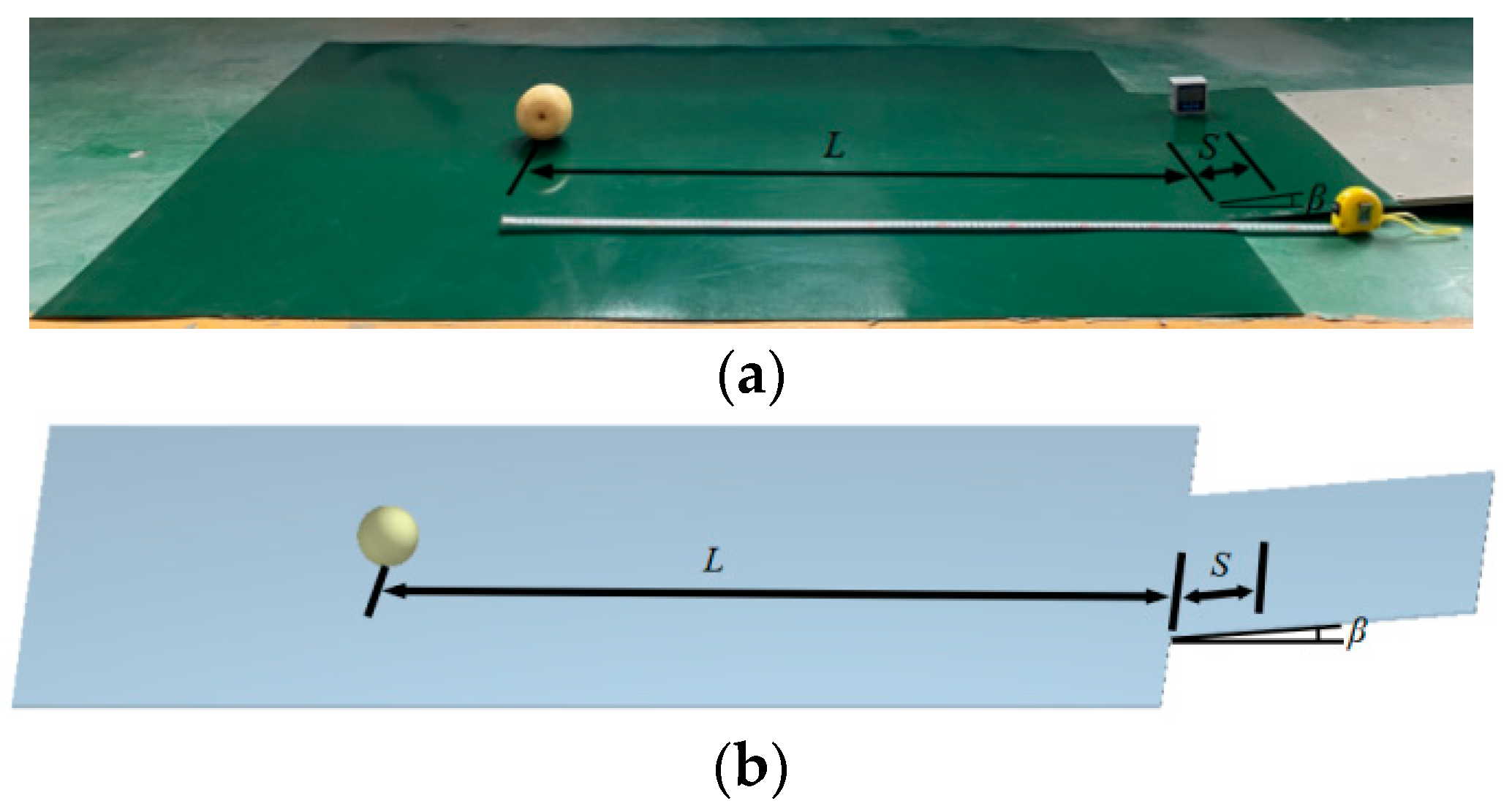
2.2.3. Calibration of Rolling Friction Coefficient between Typical Pears and Materials
2.3. Calibration of Contact Parameters between Typical Pears
2.3.1. Calibration of Collision Recovery Coefficient between Typical Pears
2.3.2. Calibration of Pear Accumulation Angle
- (1)
- Experiment of Pear Accumulation Angle
- (2)
- Experiment of the steepest ascent
- (3)
- Experiment of horizontal rotation combinations
- (4)
- Experiment of verification
3. Results and Discussion
3.1. Contact Parameters between Typical Pears and Materials
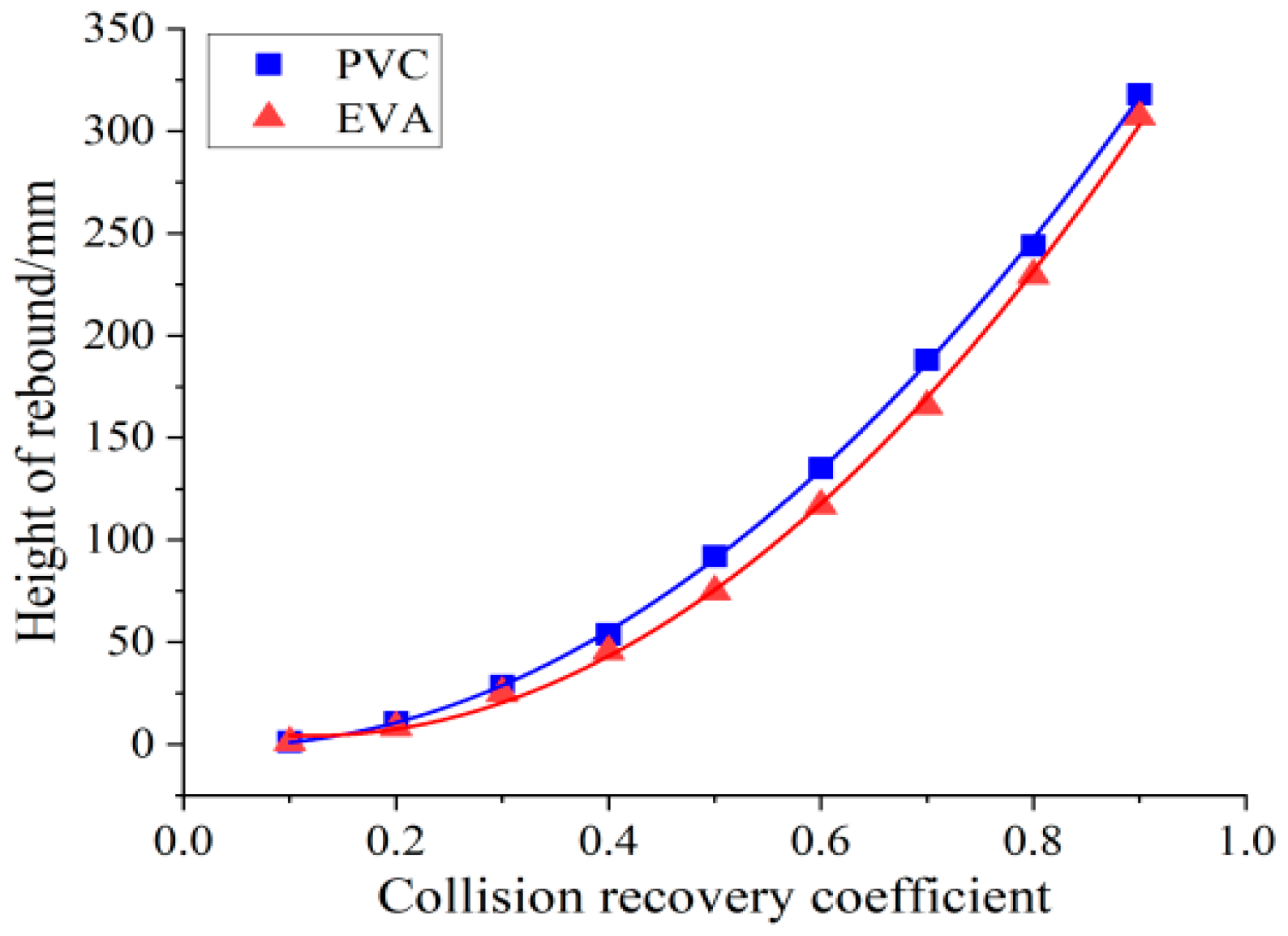
3.1.1. Collision Recovery Coefficient between Typical Pears and Materials
3.1.2. Static Friction Coefficient between Typical Pears and Materials
3.1.3. Rolling Friction Coefficient between Typical Pears and Materials
3.2. Calibration of Contact Parameters between Typical Pears
3.2.1. Calibration of Collision Recovery Coefficient between Typical Pears
3.2.2. Pear Accumulation Angle
3.2.3. Optimal Value of Influencing Factors of the Pear Accumulation Angle
3.2.4. Error Optimization Model of the Pear Accumulation Angle
3.2.5. Verification of Simulation Parameters between Pears
4. Conclusions
- (1)
- Based on the intrinsic parameters of four kinds of pears (Snow pear, Crisp pear, Huangguan pear and Qiuyue pear), their simulation models were constructed by the method of DEM. The simulation parameters between pears and the contact material (PVC, EVA foam material) were calibrated by the methods of free fall collision, inclined sliding and rolling, respectively. The collision recovery coefficients of Snow pear, Crisp pear, Huangguan pear and Qiuyue pear with PVC material were 0.542, 0.516, 0.624 and 0.573, respectively; and the static friction coefficients were 0.686, 0.651, 0.627 and 0.661, respectively; and the rolling friction coefficients were 0.00597, 0.00602, 0.00323 and 0.00627, respectively. The collision recovery coefficients between Snow pear, Crisp pear, Huangguan pear and Qiuyue pear wih EVA foam material were 0.652, 0.608, 0.678 and 0.641, respectively; and the static friction coefficients were 0.472, 0.491, 0.394 and 0.574, respectively; and the rolling friction coefficients were 0.00706, 0.00735, 0.00638 and 0.00714, respectively.
- (2)
- The pear accumulation angle was obtained by experimental measurement. The steepest ascent experiment was carried out to determine the optimal value of influencing factors of the pear accumulation angle. Considering the coefficient of collision recovery, the coefficient of static friction and the coefficient of rolling friction between pears, five-level simulation experiments of the pear accumulation angle were designed for each factor by the method of orthogonal rotation combination. The regression model of the error between the measured value and the simulated value of the pear accumulation angle was established, and the influence of three factors on the pear accumulation angle was analyzed. The results showed that the collision recovery coefficients of Snow pear, Crisp pear, Huangguan pear and Qiuyue pear were 0.54, 0.44, 0.51, and 0.48, respectively; and the coefficients of static friction were 0.27, 0.24, 0.31, and 0.28, respectively; and the coefficients of rolling friction were 0.020, 0.024, 0.018, and 0.027, respectively.
- (3)
- The accumulation angle verification experiments were carried out by the method of bottomless barrel lifting. The results showed that the relative error between the simulated and measured accumulation angle of four kinds of pears were 1.42%, 1.68%, 2.19% and 1.83%, respectively, which indicated that the calibrated simulation parameters were reliable. The research can provide a basis for the design and parameter optimization of harvesting machinery of pears.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wang, G.M.; Gu, C.; Qiao, X.; Zhao, B.Y.; Ke, Y.Q.; Guo, B.B.; Hao, P.P.; Qi, K.J.; Zhang, S.L. Characteristic of pollen tube that grew into self style in pear cultivar and parent assignment for cross-pollination. Sci. Hortic. 2017, 216, 226–233. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.; Xue, C.; Wang, R.; Zhang, M.; Qi, K.; Fan, J.; Hu, H.; Zhang, S.; Wu, J. The variation of stone cell content in 236 germplasms of sand pear (Pyrus pyrifolia) and identification of related candidate genes. Hortic. Plant J. 2021, 7, 108–116. [Google Scholar] [CrossRef]
- Winzer, F.; Kraska, T.; Elsenberger, C.; Kötter, T.; Pude, R. Biomass from fruit trees for combined energy and food production. Biomass Bioenerg. 2017, 107, 279–286. [Google Scholar] [CrossRef]
- Musacchi, S.; Iglesias, I.; Neri, D. Training Systems and Sustainable Orchard Management for European Pear (Pyrus communis L.) in the Mediterranean Area: A Review. Agronomy 2021, 11, 1765. [Google Scholar] [CrossRef]
- Seo, H.J.; Chen, P.A.; Song, J. Model based on temperature parameters predicts optimal harvest date for ‘Whasan’ Asian pear. Hortic. Env. Biotechnol. 2020, 61, 807–814. [Google Scholar] [CrossRef]
- Zicheng, G.; Guoyou, P.; Lijun, L.; Kaijie, Z.; Xiaochen, W.; Chengcai, J. Design of hand-operated piggyback jaw gripper type simplified picker for pear. Trans. Chin. Soc. Agric. Eng. 2019, 35, 39–45. (In Chinese) [Google Scholar]
- Kim, S.; Yang, S.; Cho, M.S.; Chung, S.J. Understanding the drivers of liking for fresh pears: A cross-cultural investigation of Chinese and Korean panels and consumers. J. Sci. Food Agric. 2019, 99, 5092–5101. [Google Scholar] [CrossRef]
- Liu, X.; Tian, D.; Song, M.; Geng, D.; Zhao, Y. Design and Experiment on Pneumatic Flexible Gripper for Picking Globose Fruit. Trans. Chin. Soc. Agric. Mach. 2021, 52, 30–43. (In Chinese) [Google Scholar]
- Kong, X.; Liu, J.; Yang, T.; Su, Y.; Geng, J.; Niu, Z. Numerical simulation of feed pellet breakage in pneumatic conveying. Biosyst. Eng. 2022, 218, 31–42. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, S.; Pan, H.; Zheng, Z.; Huang, Y.; Zhu, R. Effect of soil particle size on soil-subsoiler interactions using the discrete element method simulations. Biosyst. Eng. 2019, 182, 138–150. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, Y. Simulation of straw movement by discrete element modelling of straw-sweep-soil interaction. Biosyst. Eng. 2019, 180, 25–35. [Google Scholar] [CrossRef]
- Ding, X.; Wei, Y.; Yan, Z.; Zhu, Y.; Cao, D.; Li, K.; He, Z.; Cui, Y. Simulation and Experiment of the Spiral Digging End-Effector for Hole Digging in Plug Tray Seedling Substrate. Agronomy 2022, 12, 779. [Google Scholar] [CrossRef]
- Wang, X.; Yu, J.; Lv, F.; Wang, Y.; Fu, H. A multi-sphere based modelling method for maize grain assemblies. Adv. Powder Technol. 2017, 28, 584–595. [Google Scholar] [CrossRef]
- Adilet, S.; Zhao, J.; Sayakhat, N.; Chen, J.; Nikolay, Z.; Bu, L.; Sugirbayeva, Z.; Hu, G.; Marat, M.; Wang, Z. Calibration Strategy to Determine the Interaction Properties of Fertilizer Particles Using Two Laboratory experiments and DEM. Agriculture 2021, 11, 592. [Google Scholar] [CrossRef]
- Zhou, H.; Hu, Z.; Chen, J.; Lv, X.; Xie, N. Calibration of DEM models for irregular particles based on experimental design method and bulk experiments. Powder Technol. 2018, 332, 210–223. [Google Scholar] [CrossRef]
- Coetzee, C.J. Calibration of the discrete element method and the effect of particle shape. Powder Technol. 2016, 297, 50–70. [Google Scholar] [CrossRef]
- Liu, F.; Li, D.; Zhang, T.; Lin, Z. Analysis and calibration of quinoa grain parameters used in a discrete element method based on the repose angle of the particle heap. INMATEH-Agric. Eng. 2020, 61, 77–86. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Ma, X.; Cao, X.L.; Li, Z.H.; Wang, X.C. Critical Review of Applications of Discrete Element Method in Agricultural Engineering. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–20. (In Chinese) [Google Scholar]
- Chen, Z.; Wassgren, C.; Veikle, E.; Ambrose, K. Determination of material and interaction properties of maize and wheat kernels for DEM simulation. Biosyst. Eng. 2020, 195, 208–226. [Google Scholar] [CrossRef]
- Zhang, S.; Tekeste, M.Z.; Li, Y.; Gaul, A.; Zhu, D.; Liao, J. Scaled-up rice grain modelling for DEM calibration and the validation of hopper flow. Biosyst. Eng. 2020, 194, 196–212. [Google Scholar] [CrossRef]
- Li, X.; Du, Y.; Liu, L.; Mao, E.; Yang, F.; Wu, J.; Wang, L. Research on the constitutive model of low-damage corn threshing based on DEM. Comput. Electron. Agric. 2022, 194, 106722. [Google Scholar] [CrossRef]
- Nguyen, T.X.; Le, L.M.; Nguyen, T.C.; Nguyen, N.T.H.; Le, T.T.; Pham, B.T.; Le, V.M.; Ly, H.B. Characterization of soybeans and calibration of their DEM input parameters. Part. Sci. Technol. 2020, 39, 530–548. [Google Scholar] [CrossRef]
- Wenzheng, L.; Jin, H.; Hongwen, L.; Xueqiang, L.I.; Kan, Z.H.E.N.G.; Zhongcai, W.E.I. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135. (In Chinese) [Google Scholar]
- Liu, Y.; Mi, G.; Zhang, S.; Li, P.; Huang, Y. Determination of Discrete Element Modelling Parameters of Adzuki Bean Seeds. Agriculture 2022, 12, 626. [Google Scholar] [CrossRef]
- Hao, J.J.; Wei, W.B.; Huang, P.C.; Qin, J.H.; Zhao, J.G. Calibration and experimental verification of discrete element parameters of oil sunflower seeds. Trans. Chin. Soc. Agric. Eng. 2021, 37, 36–44. (In Chinese) [Google Scholar]
- Yu, Q.X.; Liu, Y.; Chen, X.B.; Sun, K.; Lai, Q.H. Calibration and Experiment of Simulation Parameters for Panax notoginseng Seeds Based on DEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 123–132. (In Chinese) [Google Scholar]
- Bai, S.; Yuan, Y.; Niu, K.; Zhou, L.; Zhao, B.; Wei, L.; Liu, L.; Xiong, S.; Shi, Z.; Ma, Y.; et al. Simulation Parameter Calibration and Experimental Study of a Discrete Element Model of Cotton Precision Seed Metering. Agriculture 2022, 12, 870. [Google Scholar] [CrossRef]
- Hou, Z.F.; Dai, N.; Chen, Z.; Qiu, Y.; Zhang, X.W. Measurement and calibration of physical property parameters for Agropyron seeds in a discrete element simulation. Trans. Chin. Soc. Agric. Eng. 2020, 36, 46–54. (In Chinese) [Google Scholar]
- Hao, J.J.; Long, S.F.; Li, H.; Jia, Y.L.; Ma, Z.K.; Zhao, J.G. Development of discrete element model and calibration of simulation parameters for mechanically-harvested yam. Trans. Chin. Soc. Agric. Eng. 2019, 35, 34–42. (In Chinese) [Google Scholar]
- Yu, F.H.; Zhou, C.Q.; Yang, X.; Guo, Z.H.; Chen, C.L. Design and Experiment of Tomato Picking Robot in Solar Greenhouse. Trans. Chin. Soc. Agric. Mach. 2022, 53, 41–49. (In Chinese) [Google Scholar]
- JIANG, K.; Liping, C.E.H.N.; ZHANG, Q. Design and Experiment on Flexible Clamping and Conveying Mechanism of Vegetable Grafting Robot. Trans. Chin. Soc. Agric. Mach. 2020, 51, 63–71. (In Chinese) [Google Scholar]
- Wen, X.; Yuan, H.; Wang, G.; Jia, H. Calibration Method of Friction Coefficient of Granular Fertilizer by Discrete Element Simulation. Trans. Chin. Soc. Agric. Mach. 2020, 51, 115–122. (In Chinese) [Google Scholar]
- Wang, Z.; Lin, S. Tests and FE analysis for dynamic responses of packaged products underrandom vibration environment. J. Vib. Shock. 2017, 36, 223–229. (In Chinese) [Google Scholar]
- Shi, L.; Sun, W.; Zhao, W.; Yang, X.; Feng, B. Parameter determination and validation of discrete element model of seed potato mechanical seeding. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–42. (In Chinese) [Google Scholar]
- Zhang, S.; Zhang, R.; Chen, T.; Fu, J.; Yuan, H. Calibration of Simulation Parameters of Mung Bean Seeds Using Discrete Element Method and Verification of Seed-metering experiment. Trans. Chin. Soc. Agric. Mach. 2022, 53, 71–79. (In Chinese) [Google Scholar]
- Scheffler, O.C.; Coetzee, C.J.; Opara, U.L. A discrete element model (DEM) for predicting apple damage during handling. Biosyst. Eng. 2018, 172, 29–48. [Google Scholar] [CrossRef] [Green Version]
- Kafashan, J.; Wiacek, J.; Ramon, H.; Mouazen, A.M. Modelling and simulation of fruit drop experiments by discrete element method. Biosyst. Eng. 2021, 212, 228–240. [Google Scholar] [CrossRef]
- Guizhi, M.; Xieteng, Q.; Wanzhi, Z.; Zhaoqin, L.; Tingting, Z.; Shuwen, W. Parameter Measurement and Calibration in Discrete Element Simulation of Broken Sweet Potato Seedlings. Am. J. Biochem. Biotechnol. 2021, 17, 256–266. [Google Scholar]
- Yu, C.; Duan, H.; Cai, X.; Xu, T.; Yao, F.; Chen, Z.; Yan, F. Discrete element simulation parameters-based measurement of materials for potato minituber. J. Huazhong Agric. Univ. 2021, 40, 210–217. (In Chinese) [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variety | Snow Pear | Crisp Pear | Huangguan Pear | Qiuyue Pear |
|---|---|---|---|---|
| Transverse diameter D/mm | 79.61 ± 4.8 | 76.81 ± 4.6 | 77.39 ± 3.9 | 70.69 ± 2.7 |
| Longitudinal height H/mm | 88.38 ± 4.5 | 69.14 ± 4.4 | 73.74 ± 4.2 | 61.77 ± 2.5 |
| Mass/g | 381.95 ± 50.11 | 272.87 ± 43.89 | 301.56 ± 37.52 | 207.59 ± 26.04 |
| Density/(kg·m−3) | 985.07 ± 17.35 | 944.64 ± 54.93 | 1049.30 ± 45.61 | 1012.80 ± 40.77 |
| Moisture content/% | 89.28 ± 4.85 | 87.14 ± 2.78 | 87.53 ± 0.27 | 89.56 ± 0.15 |
| Poisson’s ratio | 0.48 | 0.36 | 0.40 | 0.24 |
| Young’s modulus/MPa | 3.16 | 2.69 | 2.18 | 0.84 |
| Shear modulus/MPa | 1.07 | 0.99 | 0.78 | 0.34 |
| Material | Parameter | Value |
|---|---|---|
| PVC | Poisson’s ratio | 0.47 |
| Shear modulus/MPa | 2.00 | |
| Density/(kg·m−3) | 1282.00 | |
| EVA | Poisson’s ratio | 0.30 |
| Shear modulus/MPa | 0.46 | |
| Density/(kg·m−3) | 79.09 |
| Code | Experiment Factors | ||
|---|---|---|---|
| e | μn | μf | |
| −1.682 | 1 | 1 | 1 |
| −1 | 2 | 2 | 2 |
| 0 | 3 | 3 | 3 |
| 1 | 4 | 4 | 4 |
| 1.682 | 5 | 5 | 5 |
| Variety | Contact Material | Maximum Rebound Height/mm | Value of Collision Recovery Coefficient |
|---|---|---|---|
| Snow pear | PVC | 141.28 | 0.594 |
| EVA | 143.62 | 0.599 | |
| Crisp pear | PVC | 96.14 | 0.490 |
| EVA | 120.80 | 0.550 | |
| Huangguan pear | PVC | 138.58 | 0.589 |
| EVA | 152.18 | 0.617 | |
| Qiuyue pear | PVC | 105.05 | 0.512 |
| EVA | 131.24 | 0.573 |
| Variety | Contact Material | Collision Recovery Coefficient |
|---|---|---|
| Snow pear | PVC | 0.542 |
| EVA | 0.652 | |
| Crisp pear | PVC | 0.516 |
| EVA | 0.608 | |
| Huangguan pear | PVC | 0.624 |
| EVA | 0.678 | |
| Qiuyue pear | PVC | 0.573 |
| EVA | 0.641 |
| Variety | Contact Material | Inclination Angle | Static Friction Coefficient |
|---|---|---|---|
| Snow pear | PVC | 34.26° | 0.681 |
| EVA | 24.54° | 0.457 | |
| Crisp pear | PVC | 33.21° | 0.655 |
| EVA | 22.78° | 0.420 | |
| Huangguan pear | PVC | 32.06° | 0.626 |
| EVA | 21.60° | 0.396 | |
| Qiuyue pear | PVC | 33.43° | 0.660 |
| EVA | 29.90° | 0.575 |
| Variety | Contact Material | Static Friction Coefficient |
|---|---|---|
| Snow pear | PVC | 0.686 |
| EVA | 0.472 | |
| Crisp pear | PVC | 0.651 |
| EVA | 0.491 | |
| Huangguan pear | PVC | 0.627 |
| EVA | 0.394 | |
| Qiuyue pear | PVC | 0.661 |
| EVA | 0.574 |
| Variety | Contact Material | Rolling Distance/cm | Rolling Friction Coefficient |
|---|---|---|---|
| Snow pear | PVC | 128.88 | 0.00629 |
| EVA | 107.51 | 0.00742 | |
| Crisp pear | PVC | 128.27 | 0.00631 |
| EVA | 103.91 | 0.00766 | |
| Huangguan pear | PVC | 125.09 | 0.00336 |
| EVA | 119.79 | 0.00674 | |
| Qiuyue pear | PVC | 122.29 | 0.00666 |
| EVA | 106.66 | 0.00748 |
| Variety | Contact Material | Rolling Friction Coefficient |
|---|---|---|
| Snow pear | PVC | 0.00597 |
| EVA | 0.00706 | |
| Crisp pear | PVC | 0.00602 |
| EVA | 0.00735 | |
| Huangguan pear | PVC | 0.00323 |
| EVA | 0.00638 | |
| Qiuyue pear | PVC | 0.00627 |
| EVA | 0.00714 |
| Variety | Value of Maximum Rebound Height/mm | Value of Collision Recovery Coefficient |
|---|---|---|
| Snow pear | 100.40~194.88 | 0.501~0.698 |
| Crisp pear | 71.57~106.50 | 0.423~0.516 |
| Huangguan pear | 93.70~132.25 | 0.484~0.575 |
| Qiuyue pear | 76.39~119.25 | 0.437~0.546 |
| Number | Experiment Factors | Experiment Results | |||
|---|---|---|---|---|---|
| e | μn | μf | θ,/(°) | σ/% | |
| 1 | 0.50 | 0.10 | 0.01 | 16.98 | 7.97 |
| 2 | 0.54 | 0.20 | 0.02 | 18.14 | 1.69 |
| 3 | 0.58 | 0.30 | 0.03 | 19.35 | 4.88 |
| 4 | 0.62 | 0.40 | 0.04 | 20.52 | 11.22 |
| 5 | 0.66 | 0.50 | 0.05 | 22.75 | 23.31 |
| 6 | 0.70 | 0.60 | 0.06 | 23.43 | 26.99 |
| Code | Experiment Factors | ||
|---|---|---|---|
| e | μn | μf | |
| −1.682 | 0.47 | 0.03 | 0.003 |
| −1 | 0.50 | 0.1 | 0.01 |
| 0 | 0.54 | 0.2 | 0.02 |
| 1 | 0.58 | 0.3 | 0.03 |
| 1.682 | 0.61 | 0.37 | 0.037 |
| Number | Parameter | θ,/(°) | Y(σ)/% | ||
|---|---|---|---|---|---|
| A (e) | B(μn) | C(μf) | |||
| 1 | 1 | −1 | 1 | 17.46 | 5.37 |
| 2 | −1 | 1 | 1 | 18.95 | 2.71 |
| 3 | 0 | 0 | 0 | 18.13 | 1.73 |
| 4 | 0 | 1.682 | 0 | 18.65 | 1.08 |
| 5 | 0 | 0 | 0 | 18.00 | 2.44 |
| 6 | 1.682 | 0 | 0 | 17.94 | 2.76 |
| 7 | −1 | 1 | −1 | 18.23 | 1.19 |
| 8 | 1 | 1 | 1 | 19.09 | 3.47 |
| 9 | 1 | 1 | −1 | 17.91 | 2.93 |
| 10 | 0 | 0 | 0 | 18.26 | 1.03 |
| 11 | −1.682 | 0 | 0 | 18.19 | 1.41 |
| 12 | 0 | 0 | 0 | 18.12 | 1.79 |
| 13 | 1 | −1 | −1 | 16.94 | 8.18 |
| 14 | 0 | 0 | 1.682 | 18.35 | 0.54 |
| 15 | −1 | −1 | 1 | 17.79 | 3.58 |
| 16 | 0 | 0 | 0 | 18.24 | 1.14 |
| 17 | 0 | 0 | 0 | 18.29 | 0.87 |
| 18 | 0 | −1.682 | 0 | 16.79 | 9.00 |
| 19 | 0 | 0 | −1.682 | 17.72 | 3.96 |
| 20 | −1 | −1 | −1 | 16.88 | 8.51 |
| Source | Sum of Squares | Degree of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 121.46 | 9 | 13.50 | 14.90 | 0.0001 ** |
| A | 2.85 | 1 | 2.85 | 3.14 | 0.1067 |
| B | 60.09 | 1 | 60.09 | 66.33 | <0.0001 ** |
| C | 9.57 | 1 | 9.57 | 10.57 | 0.0087 ** |
| AB | 0.13 | 1 | 0.13 | 0.15 | 0.7101 |
| AC | 0.16 | 1 | 0.16 | 0.18 | 0.6814 |
| BC | 12.03 | 1 | 12.03 | 13.28 | 0.0045 ** |
| A2 | 3.25 | 1 | 3.25 | 3.59 | 0.0873 |
| B2 | 33.27 | 1 | 33.27 | 36.73 | 0.0001 ** |
| C2 | 4.09 | 1 | 4.09 | 4.51 | 0.0596 |
| Residual | 9.06 | 10 | 0.91 | ||
| Lack of Fit | 7.29 | 5 | 1.46 | 4.11 | 0.0734 |
| Pure error | 1.77 | 5 | 0.35 | ||
| Sum | 130.52 | 19 |
| Variety | Collision Recovery Coefficient | Static Friction Coefficient | Rolling Friction Coefficient |
|---|---|---|---|
| Snow pear | 0.54 | 0.27 | 0.020 |
| Crisp pear | 0.44 | 0.24 | 0.024 |
| Huangguan pear | 0.51 | 0.31 | 0.018 |
| Qiuyue pear | 0.48 | 0.28 | 0.027 |
| Variety | Measured Value | Simulated Value | Error/% |
|---|---|---|---|
| Snow pear | 15.53 | 15.75 | 1.42 |
| Crisp pear | 15.04 | 15.29 | 1.68 |
| Huangguan pear | 15.31 | 15.65 | 2.19 |
| Qiuyue pear | 15.49 | 15.77 | 1.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, G.; Wang, S.; Shi, W.; Gong, Z.; Gao, M. Simulation Parameter Calibration and Test of Typical Pear Varieties Based on Discrete Element Method. Agronomy 2022, 12, 1720. https://doi.org/10.3390/agronomy12071720
Fan G, Wang S, Shi W, Gong Z, Gao M. Simulation Parameter Calibration and Test of Typical Pear Varieties Based on Discrete Element Method. Agronomy. 2022; 12(7):1720. https://doi.org/10.3390/agronomy12071720
Chicago/Turabian StyleFan, Guiju, Siyu Wang, Wenjie Shi, Zhenfeng Gong, and Ming Gao. 2022. "Simulation Parameter Calibration and Test of Typical Pear Varieties Based on Discrete Element Method" Agronomy 12, no. 7: 1720. https://doi.org/10.3390/agronomy12071720
APA StyleFan, G., Wang, S., Shi, W., Gong, Z., & Gao, M. (2022). Simulation Parameter Calibration and Test of Typical Pear Varieties Based on Discrete Element Method. Agronomy, 12(7), 1720. https://doi.org/10.3390/agronomy12071720