The above choice of autowaves predetermined the application of the adequately developed theory of autowave processes [
34,
43]. Generally, the autowaves in active media of different nature are described by parabolic differential equations of reaction-diffusion type
[
34,
52]. They are obtained by adding a nonlinear function
to the right side of the differential diffusion or heat conductivity equation
and allow one to explain generation of autowave structures on macroscopic scale in a homogeneous system [
34,
53]. An explicit form of the function
is determined either by physical reasons if the mechanism of the phenomenon is known or is written in the form of cubic nonlinearity. Methods of solving these equations [
54] have been successfully used to analyze the dynamics of structures in chemical and biological objects.
3.1. Autowave Plastic Flow Equations
The complexity of physical aspects of the plasticity problem consists of optimal choice of variables suitable for a description of plastic flow processes. For a localized plastic flow, it was suggested to consider the plastic strain
ε as an activator and the elastic stress
σ as an inhibitor [
25]. The main argument in favor of such choice consists of the following. As is well known [
1,
55], to describe the plastic deformation of a solid, the stress tensor is subdivided into the strain deviator and spherical tensor of strain. In this case, the strain deviator is responsible for plastic change of the form, and the spherical tensor creates hydrostatic compression or tension that prevents the plastic strain according to the law of elasticity of volume strain [
1]. The choice of the plastic strain and elastic stress as control parameters is convenient because it allows experimental determination of
σ and
ε from the diagram
and spatial separation of elastically stressed and plastically strained zones defining the multiscale character of the process [
56].
The evidence in favor of such choice are adiabatic cooling of the sample in tension and local heat generation in shear planes [
10]. These processes are opposite. The authors [
57] hold a similar point of view on the nature of the activator and inhibitor of plastic deformation. Taking into account the choice of the governing factors, the equations for the strain (activator) and stress (inhibitor) can be written by analogy with [
34,
53] (they are actually postulated) in the form of the system of equations
where the first equation describes the kinetic strain changes (activator) and the second equation describes the stress (inhibitor). Double subscripts of the coefficients
and
in Equations (7) and (8) are explained below.
The nonlinear functions
and
take into account the nonlinearity of deforming medium and describe the event of relaxation of the strain localized on the front of a strain nucleus [
5,
58]. They characterize the redistribution of strains and stresses among neighboring microvolumes near the relaxing stress concentrator and are due to continuous motion of the strain front. The diffusion terms
and
describe the macroscale redistribution of the strain and stress. It is possible to consider that the right sides of Equatins (7) and (8) contain
hydrodynamic (
and
) and
diffusion-like (
and
) components [
59] whose roles in the strain dynamics are not equal.
It is well known from the theory of parabolic differential equations [
43] that the interaction propagation rate in medium is infinite, i.e.,
. Such situation is physically unrealizable and must be replaced by the condition
that limits the velocity of signal transfer in the medium by the sound velocity
. The time of emergence of new plasticity nuclei is
This gives rise to the idea that the acoustic properties of the medium can play an important role in the initiation of new dislocation shears at a macroscopic distance from the existing plasticity nuclei [
60]. We note that the first-order time derivatives in Equations (7) and (8) emphasize the irreversibility of plastic strain. Thus, Equations (7) and (8) consider
nonlinearity and
activity of the deforming medium as well as the
openness of the system and the
irreversibility of the plastic flow.
Equation (7) follows from the condition of continuity of functions describing deformation kinetics [
61]. In this case,
where
is the strain flow in the field of its gradient. If the coefficient
depends on co-ordinate,
x, i.e.,
, then
where
is a nonlinear function of the strain and stress. It is clear that Equation (10) is equivalent to Equation (7) postulated above.
In its turn, Equation (8) follows from the Euler equation [
62]
in which
is the momentum flow density tensor,
is the unit tensor,
p is the pressure, and
and
are the components of the flow velocity. The stress tensor
is the sum of elastic,
, and viscous,
stress components, that is,
, and
The elastic stress relaxation rate can be written as follows [
50]:
, where
M is the elastic modulus of the system ‘
sample–test machine’,
10
–5–10
–4 Pa·s is the dislocation drag coefficient, and
is the dislocation motion rate [
63].
The viscous stresses depend on the elastic wave velocity in the medium and its dynamic viscosity
as
. Here
[
60],
is the propagation velocity of the transverse elastic waves at
and
. In this case,
, and the relaxation rate of viscous stress is
, so that
where
is the transfer coefficient. Thus, the terms
and
in Equation (12) determine the relaxation rates of the elastic and viscous stresses, respectively, and Equations (12) and (8) are equivalent.
3.2. Analysis of the Autowave Plasticity Equations
To estimate the possibilities of Equations(7) and (8) for a description of localized plasticity, we now consider the explicit form of the nonlinear functions
and
where
is the dynamic viscosity of the medium,
and
are the relaxation times of the strain and elastic stresses, and
is the yield strength. Evidentially, Equation (13) is the Maxwell equation for a viscoelastic medium. The first term in Equation (14) describes the stress relaxation to the level
, and the second term describes the nonlinear feedback effects.
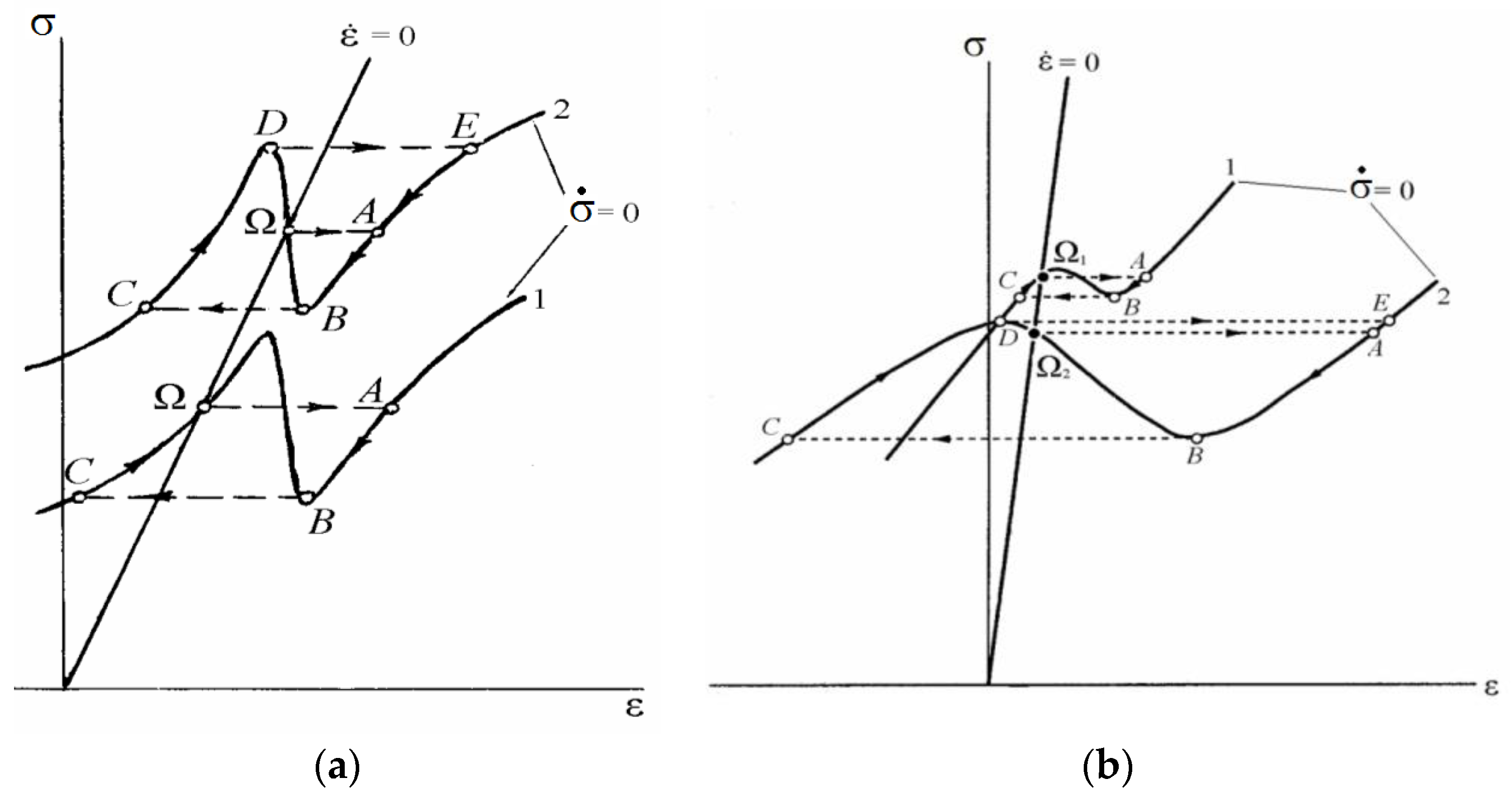
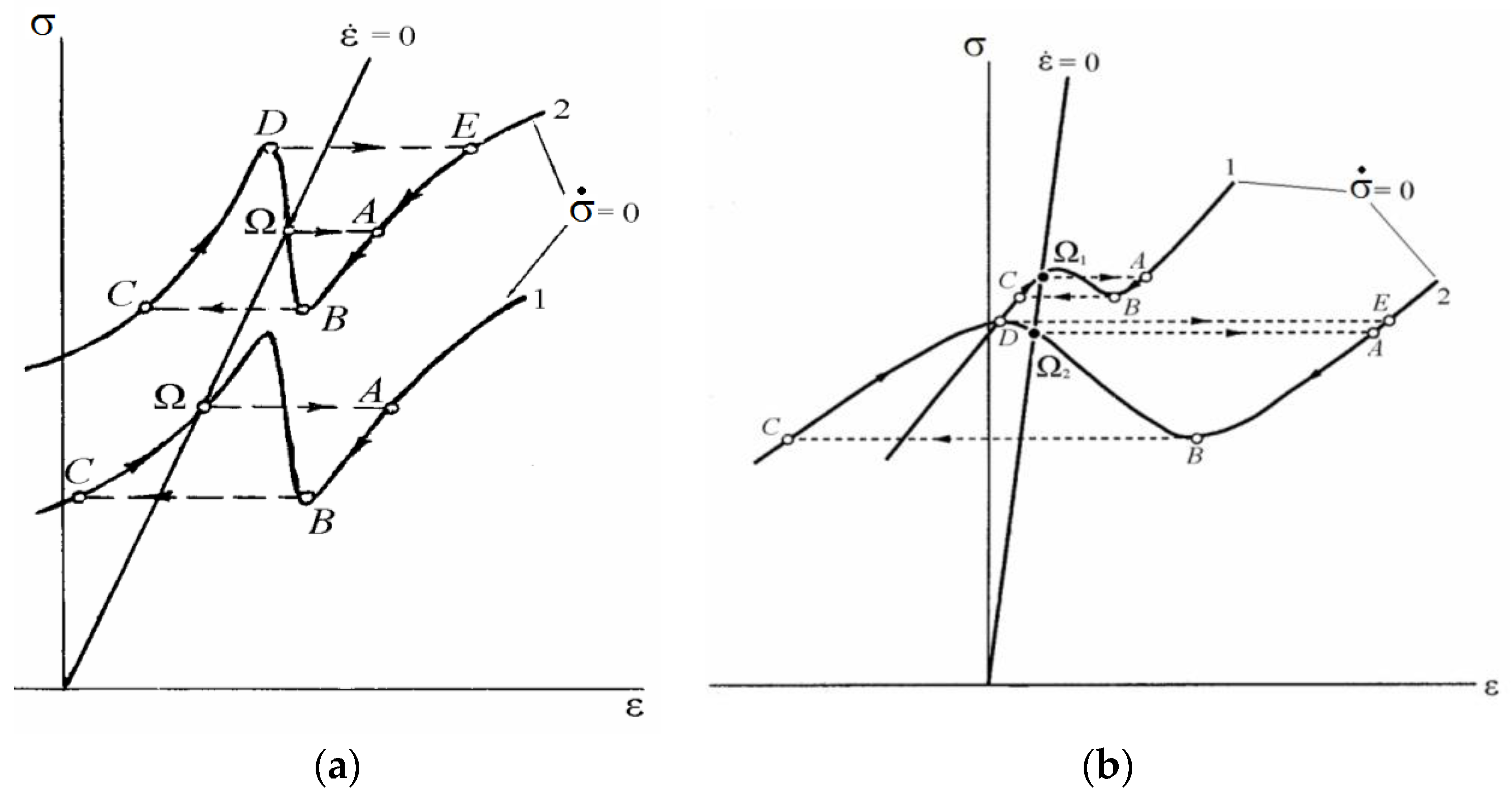
To analyze qualitatively Equations (13) and (14), we take advantage of the isocline method by equating to zero the left sides of the equations. Then
and
The 0-isoclines so obtained are shown in
Figure 5a. Their analysis consists of the search of special points (points of intersection of 0-isoclines). The
N-shaped form and the position of function (16) are determined by constants entering into it and by the strain
ε. For small stresses, after achievement of the special point Ω, any small deviation from the equilibrium leads to the jump-like transition Ω → А to the stable isocline branch
. At low stresses, the point makes the cycle А → B → С → Ω, and the system returns to the equilibrium again. At high stresses (the upper curve), after disruption of the equilibrium Ω → А, the depicting point no longer returns to the equilibrium position and moves along the closed trajectory А → B → С → D → E → B. The first case corresponds to the propagation of the switching autowave (the Lüders front). The repetition of cycles in the second case indicates the formation of the phase autowave.
The function
can also be defined in another way. For example, for the thermal activation character of the relaxation process, this dependence can be logarithmic in character, which follows from the kinetics of the thermally activated plastic deformation [
64]. Then
where the constant
A is determined by the mechanism of plastic strain and
is the stress function. The equation for the 0-isocline in this case has the form
shown in
Figure 5b. The subsequent analysis also demonstrates the change in plastic flow modes. At low stresses (curve 1), the depicting point on the path Ω
1 → A → B → C returns to the equilibrium position. At high stresses (curve 2), the depicting point after transition Ω
2 → A moves along the trajectory B → C → D → E → B that corresponds to the formation of the phase autowave.
Thus, Equations (7), (8), (10), and (12) are applicable for a description of the formation of autowaves. With their help, the existence of switching and phase localized plasticity autowaves at stages of the yield plateau and linear work hardening, respectively, can be explained.
3.3. On the Application of the Autowave Representations
In physics of lattice defects, one of the first attempts to use Equation (7) belongs to Donth [
65,
66] who explained with its help the contribution of dislocation kink motion to the amplitude-dependent internal friction. Later on, such ideas were used directly to describe the self-organization of dislocation ensembles during plastic deformation. For example, the situation with propagation of strain fronts was studied in [
67,
68], where correct estimation was obtained of the autowave propagation velocity of inhomogeneous plastic shear (the switching autowave) for motion of the Lüders band.
In [
69,
70,
71,
72], the autowave representations were used to solve the problem of the jump-like strain and to analyze the formation of slip bands. For these purposes, the authors wrote dynamic equations for dislocation ensembles and considered conditions of forming slip bands from originally chaotic defect distribution. The complex structure of the strain waves propagating in the deforming medium and consisting of the head part of soliton type and of the oscillating tail gradually lagging behind the head part during motion was predicted. This effect can be considered as one of the mechanisms of autowave generation in deforming media. General analysis of the problem of stability of a dislocation ensemble demonstrated that dislocation density fluctuations lead to the emergence of stress concentrators in a deforming medium.
Apparently, the mechanisms of self-organization and formation of dislocation ensembles were considered most consistent and rigorously in [
73,
74,
75,
76]. Thus, in [
74] the relationship between the strength and plasticity was analyzed on the examples of work hardening curves for some metals and alloys with the Face Centered Cube (FCC) lattice. The analysis was based on the criterion for the neck formation in a sample in tension and on the work hardening curve illustrating the dynamics of dislocation density in the material with increasing strain degree and the influence of structural factors of these processes.
The influence of the Peierls stress on the strength and strain before the neck formation was studied in [
75] for metals and alloys in tension. The analysis was based on the equation of dynamics of dislocation density with strain determining the character of work hardening of the material and the influence of the Peierls stress on the parameters of this equation in terms of the annihilation coefficient of screw dislocations. In [
76] the mechanism of work hardening and formation of fragmented dislocation structures in metals subject to severe plastic deformation was discussed based on the equations of dislocation kinetics.
The authors of [
77,
78], based on the autowave approach, succeeded in explaining the transition of the autowave strain modes to the plastic flow from the Lüders front to the phase autowave and the quadratic dependence of the autowave dispersion at the stage of linear work hardening. The authors of [
79,
80] considered, in detail, the possibility of self-organization of dislocation structures by a plastic flow, substantiated the introduction of the hydrodynamic strain flow component, and illustrated how such process affects the work hardening kinetics and dynamics. They demonstrated that the dynamics of the deformation processes obeys the laws of synergetics.
3.5. Plastic Strain as Self-Organization Process in a Medium
Haken [
12] stated that “the system is called self-organizing if it acquires any spatial, time, or functional structure without specific external impact.” In this case, the localization dynamics, that is, spontaneous stratification of the medium into deforming and non-deforming volumes is equivalent to its self-organization, that is, ordering (structurization). An explanation of such processes is a traditional problem for synergetics.
Olemskoi [
11,
81,
82,
83] applied synergetic apparatus to a detailed description of problems of condensed state physics. In particular, he first succeeded in consideration from these positions the patterns of formation of single defects and localization autowaves in the plastic flow under active loading.
In [
84,
85,
86,
87,
88,
89,
90,
91], problems of structurization of condensed media were analyzed; in particular, the formation of localized plasticity autowaves and the nature of hydrodynamic and diffusion-like plastic flow modes. The application of these ideas directly to a solution of the plasticity problem signaled a new view on the plastic strain as on the process of self-organization of defective structure on different scale levels. Balankin [
84,
85] successfully used the synergetic approach to describe the strain nature and the destruction processes based on excitation mechanisms of the crystal lattice. In [
86,
87,
88,
89,
90,
91] the authors described the process of plastic strain as a nonequilibrium kinetic transition leading to plastic flow localization. Within the framework of this approach, the deforming material was considered as a system capable of generating dissipative structures more efficient in comparison with motion of single dislocations, in particular, plastic flow autowaves. This is in agreement with the results of investigations of dislocation structures in a plastic flow. Thus, for example, the authors of [
92] established regularities of generation of new dislocation substructures during deformation and showed that a new structure emerges against the background of the old structure and is accompanied by its degradation. It is important that emergence of new substructures corresponds to a change in the mechanism of work hardening.
3.6. Structure of the Autowave Plastic Flow Model
The new approach required the development of a self-organization model focused on the problem of plasticity of solids. It is conformed to the idea of Kadomtsev [
45] who considered that “during self-organization of complex open physical systems, trends may emerge toward their stratification into information and dynamic subsystems”.
This claim is in agreement with representations about competition between the autocatalytic and damping factors discussed above, and a relationship can be seen of the dynamic and information subsystems with them. Therefore, to develop a model, we define the specificity of the information and dynamic subsystems in a deforming medium bearing in mind that
- The structure of the information and dynamic subsystems should be closely related to the processes that control the plastic flow,
- There should be a mechanism of subsystem interaction of such power that events in one subsystem could cause responses in another.
Deformation involves the elastic and plastic components. The elastic state at nominal (average) stresses
is characterized by the presence in the material of a set of dwelling stress concentrators with amplitude
randomly distributed over the volume, which is typical of an active medium. For
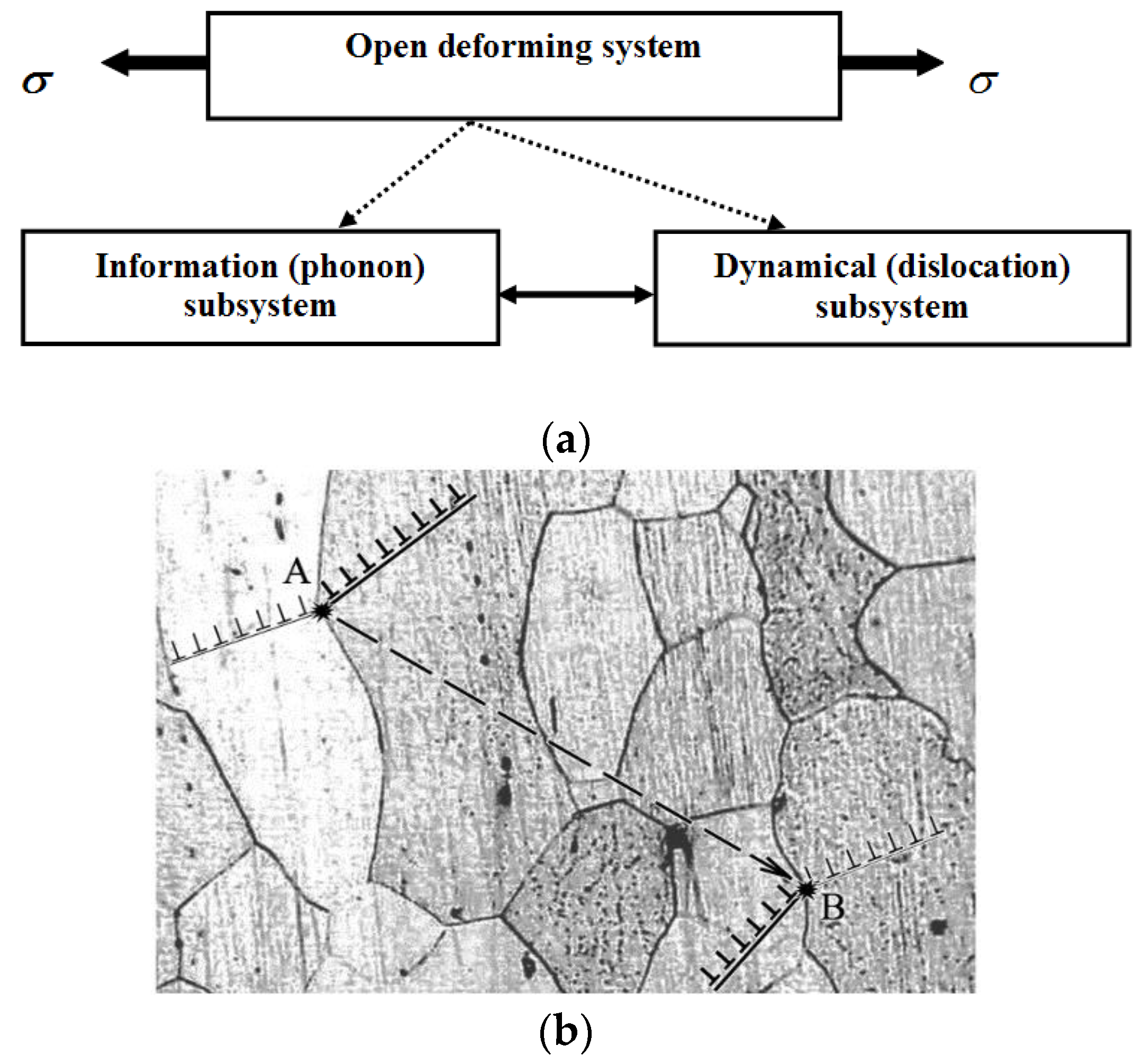
, the medium is transformed into the plastic state in which a part of the concentrators remains in the waiting state, and another part relaxes. This is taken into account in the
Two-component plasticity model whose flowchart is shown in
Figure 6a. In this case,
the dynamic subsystem is formed by a set of relaxing concentrators—elementary plastic strain relaxation events, where thermally activated relaxation (destruction) of the concentrator is considered as an elementary plastic flow event of dislocation shear, twinning, etc.
The information subsystem includes a set of elastic pulses of acoustic emission generated during relaxation events.
The state of a deforming medium in this model is characterized by wandering of acoustic pulses in the system of elastic stress concentrators. Being superimposed on the elastic concentrator fields, they increase the probability of plastic strain relaxation events. Autowave modes are generated due to interaction of the dynamic and information subsystems provided on the one hand, by generation of pulses of acoustic emission in each relaxation event, and on the other hand, by their absorption by dwelling concentrators. Thus, either
spontaneous or
induced relaxation is observed in the system by the condition
; the latter is caused by activation of dwelling concentrators by acoustic emission pulses [
93,
94,
95].
The scenario of plastic flow, as it is shown in
Figure 6b, includes the two steps. First of all, transformations in the dynamic subsystem, that is, spontaneous or induced plastic shear (transformation of the waiting concentrator into the relaxing one and again into the dwelling one; points A and B). After that, transformations in the information subsystem, that is, emission of acoustic pulse in the process of concentrator destruction (point
A) and its absorption by another dwelling concentrator (point
C). Then these steps are repeated.
Thus, two effects, typically studied separately, are combined in the two-component model. The first effect is the acoustic emission accompanying the plastic flow events and conventionally used to non-destructive testing the material state [
93,
96]. The second effect is acoustic aided plasticity whose mechanism, explained in [
94,
95], consists of plasticization of the material by imposing stresses oscillating with ultrasonic frequency on a deforming object.
Obviously, the above-described mechanism is possible because of the known property of a nonlinear deforming medium to generate harmonics during elastic signal propagation. In this case, the elements of the medium can be related with these harmonics [
45]. Thus, in particular, if the acoustic signal containing the harmonic of a certain frequency is generated in the process of destruction of the stress concentrator A, such harmonic can be absorbed by the accepting concentrator C of similar structure and spectrum with the corresponding increase of the impact.
3.7. Quantitative Estimations of Possibilities of the Model
Let us compare the expectation times for thermally activated relaxation events [
64] in the absence of acoustic pulse (spontaneous relaxation)
and after its imposition (induced relaxation)
In these equations,
is the Debye frequency,
is the potential barrier to be overcome during the relaxation event,
is the activation volume of this event [
64],
l is the size of the shear zone,
is the Boltzmann constant,
Т is temperature, and
Е is the elastic modulus. With the help of calculations by Equations (19) and (20) we set the activation enthalpy of the destruction process as
0.5 eV [
64], and the acoustic pulse with elastic strain amplitude
decreases this parameter by
0.1 eV. Calculation for
1/40 eV yields
5 × 10
−5 s and
9 × 10
–7 s
Such estimations explain the principal possibility of plastic flow acceleration under the action of acoustic pulses and confirm the correctness of the model.
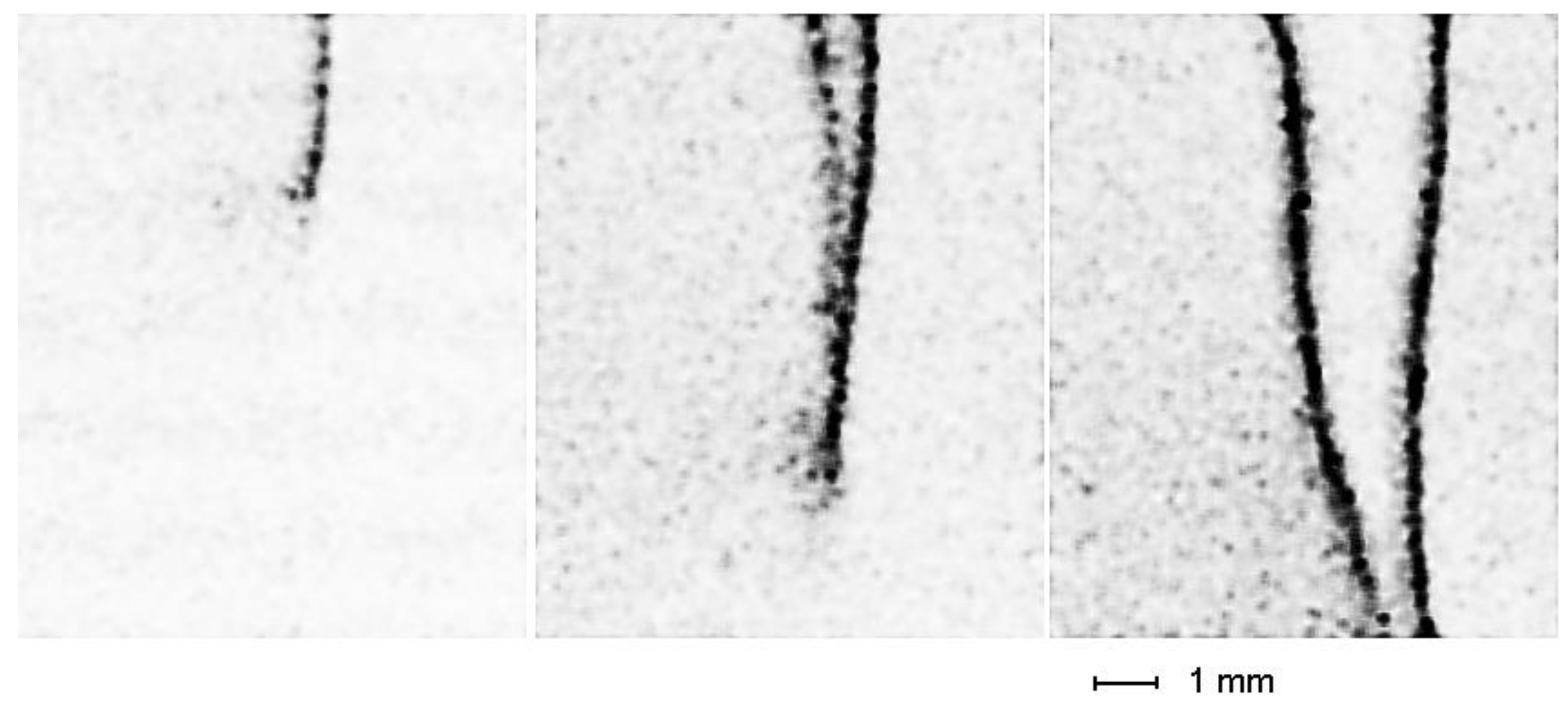
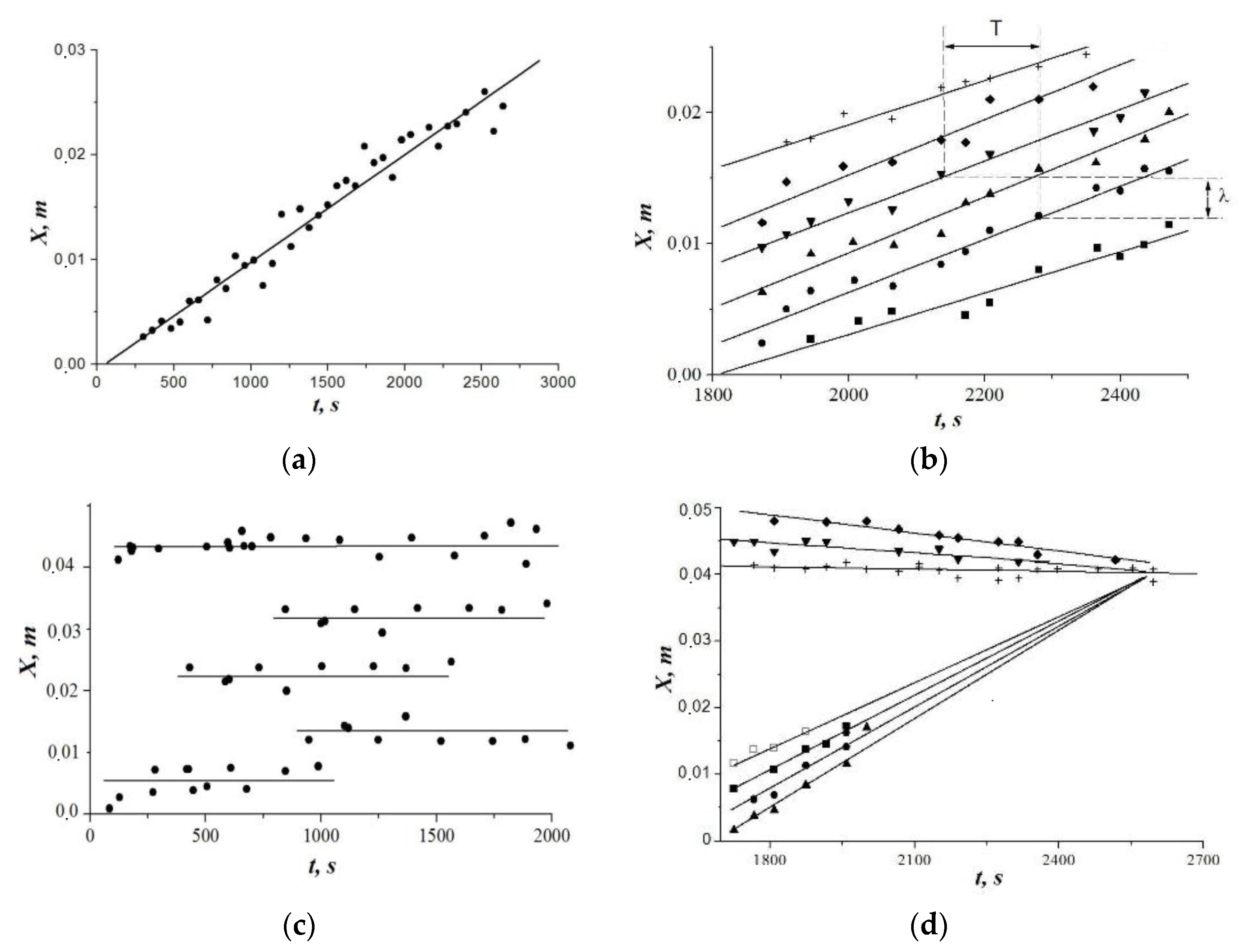
Equations (19) and (20) demonstrate the possibility of induced destruction of stress concentrators. It seems likely that the rate of localized plasticity autowave dynamics is determined by the time of plasticity nucleus growth from a nucleus that can be identified with the intergrowth of the Lüders band through the sample (
,
Figure 7).
The principal problem in explanation of the autowave nature irrespective of the system nature matches the macroscopic autowave scale with the microscale of internal interactions. In the context of the model being developed, it can be explained as follows. Let a shear emits a pulse of transverse acoustic waves with frequency
10
6 Hz corresponding to a maximum of the spectrum [
93].
As shown in [
97], having passed through an elastically stressed region, such pulse is split into two orthogonally polarized acoustic waves propagating with velocities
and
. The difference between their wavelengths
reaches ~10
–4 m provided that the difference between the principal normal stresses
10
2 MPa in Equation (21), the material density
5 × 10
3 kg/m
3, and the sound velocity
≈ 10
3 m/s. The probability of activation of a new shear increases when the maxima of
coincide in both waves, that is, when the elastic energy is maximal. This corresponds to the condition
10
–2 m, which is close to the observable autowave length and explains the origin of the plasticity nuclei at the distance ~
λ from the existing strain front at the expense of the process of acoustic initiation of strain.
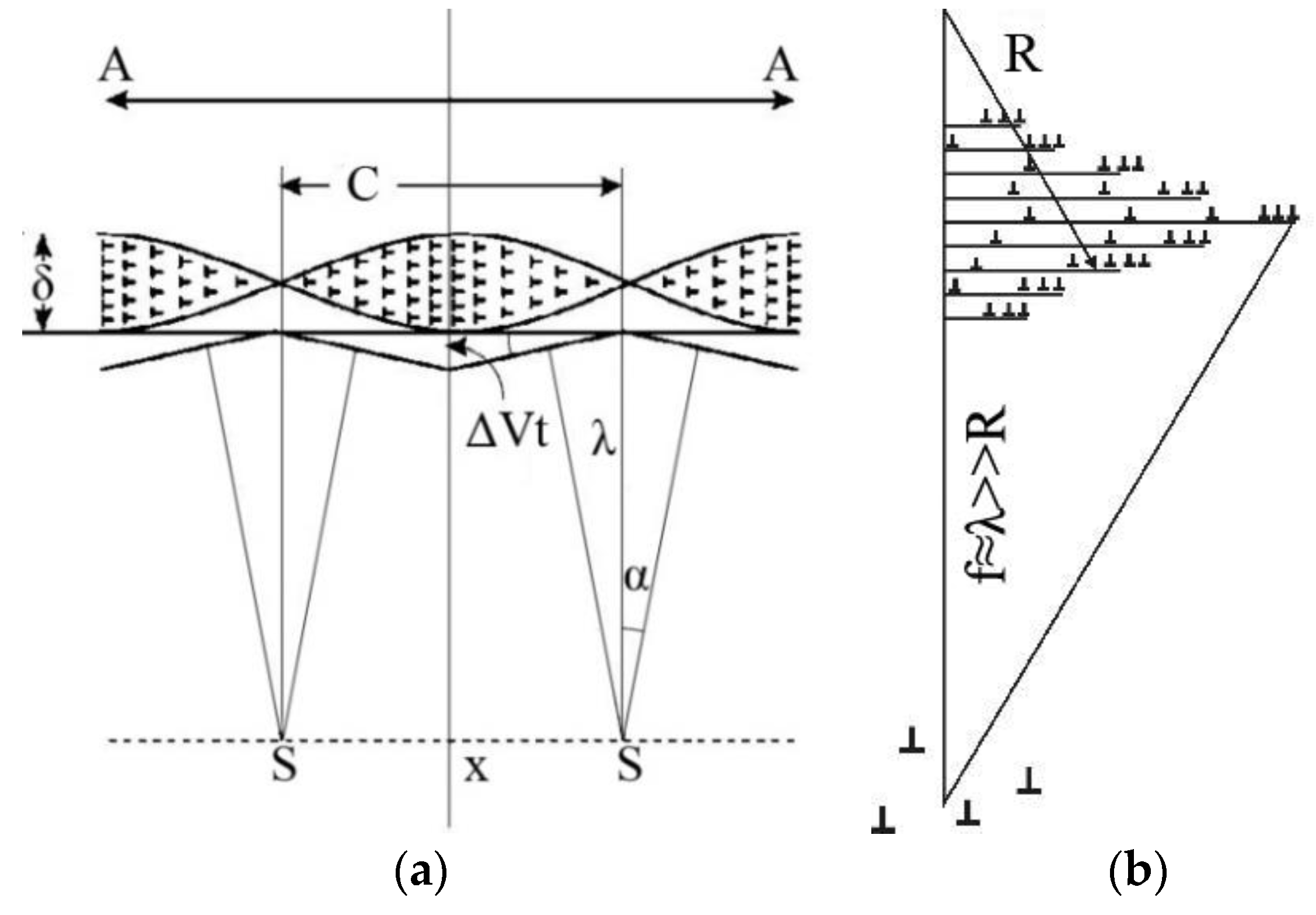
Another variant of estimation is based on an analysis of acoustic signal propagation through a fragment with inhomogeneous density of dislocations of the type of the existing plastic flow nucleus (
Figure 8a). If the dislocation density in the fragment decreases from the nucleus toward the periphery, the internal stresses
[
6] are inhomogeneously distributed. Such fragment can be considered as an acoustic lens with diameter
C. Together with the dependence
[
60], this causes rotation of the plane wave front А–А passing in this region through a small angle
α.
The waves from neighboring regions playing the role of lenses are focused onto the symmetry axis where the level of the elastic stress increases, thereby increasing the probability of relaxation plasticity events.
This initiates the formation of a new strain nucleus at the same distance ~
λ from the initial. Simple geometric calculation the details of which and the designations are explained in
Figure 8a demonstrates that
It is convenient to estimate the effect quantitatively for polycrystalline Al in which the velocity is
3⋅10
3 m/s, and its experimentally determined range of variation in the plastic strain interval corresponding to the stage of parabolic hardening is
10 m/s [
43]. For the fragment size
δ ≈ 10
–7 m and the ratio
10, we obtain
λ ≈ 10
–2 m, which is close to the observable distance between the localized strain nuclei (autowave strain length). Since
, we can consider that Equation (22) relates the microscale of the dislocation substructures and the macroscale of the autowave deformation.
A simpler variant of such estimation is possible. Since the velocity of elastic waves depends on the strain and the dislocations are conventionally distributed inhomogeneously. The inhomogeneity zone with size
can be considered as an acoustic lens with curvature radius
. Its focal length
(
Figure 8b) is [
49]
where
is the refractive index of sound waves in the deforming medium. From experimental data presented in [
60], it follows that
1.002 almost until destruction; during deformation of Al,
≈ 10
–5 m. Then according to Equation (23)
5 × 10
–3 m. The probability of stress concentrator destruction increases at this distance, and a new strain localization nucleus is formed. Since the parameters
and
R are determined by the material structure, the dynamics of the strain nuclei in the plastic flow can control reorganization of the autowave strain localization pattern. Dislocation ensembles with inhomogeneous distribution of defects in the volume—dislocation fragments, cells etc.—can play the role of acoustic lenses [
4,
7,
98].
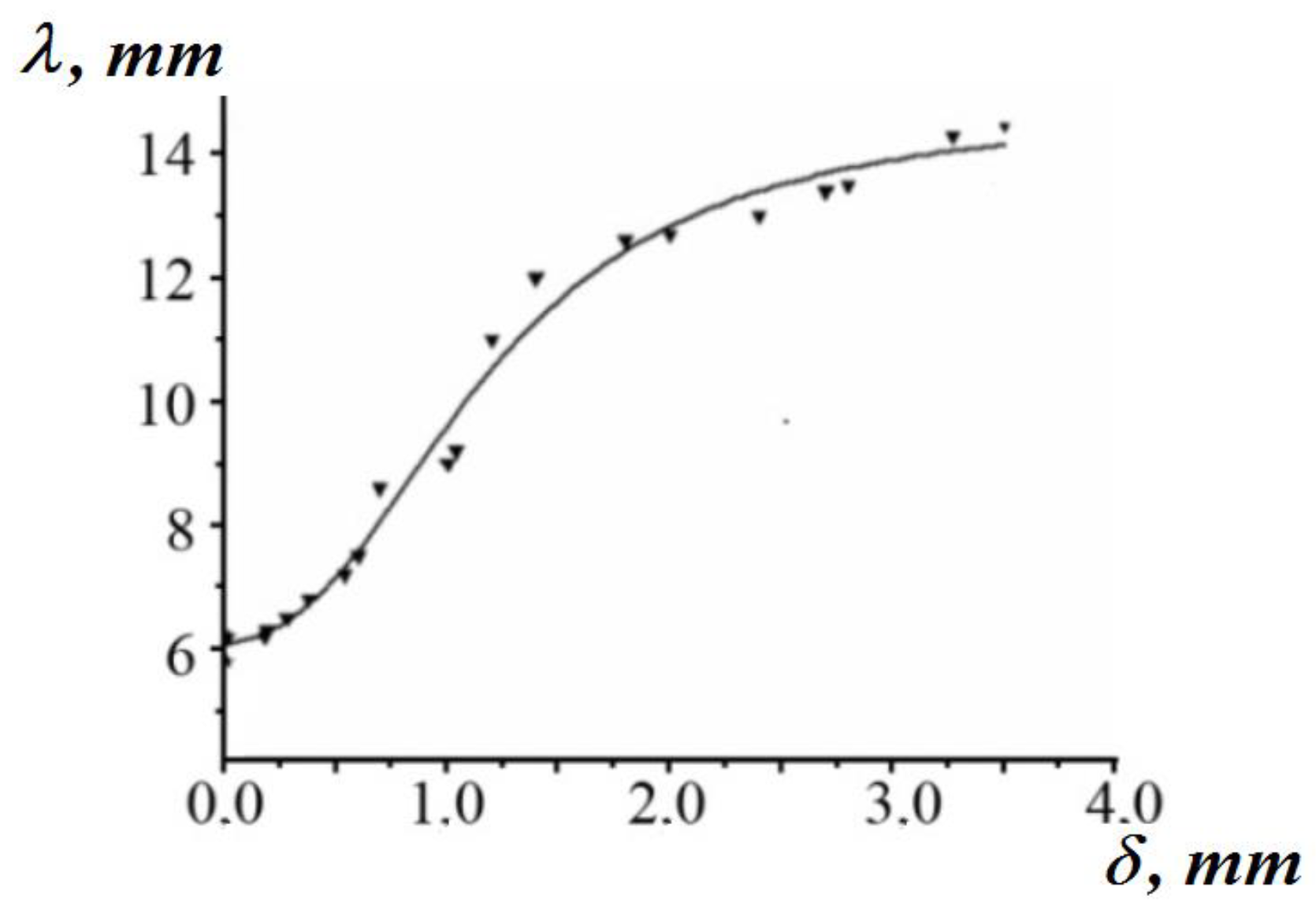
In these cases, variants of propagation and behavior of macroscopic localized strain zones can be caused by the change of the acoustic lens geometry (parameters C and δ and their ratio ) or dislocation distributions during plastic flow. According to Equation (22), the increase of the fragment size initiates growth of λ and can cause motion of the plastic flow nucleus along the tension axis at the stage of linear work hardening.
The above estimations show that the most complicated problem of plastic flow physics, which is the emergence of macroscopic autowave scale of ~10–2 m in actual deforming material whose structural defects (dislocations) possess much smaller spatial scale on the order of the Bürgers vector of ~10–10 m, finds a non-contradictory explanation in the context of the proposed two-component model of localized plastic flow dynamics.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}