
A Sensitivity-Enhanced Vertical-Resonant MEMS Electric Field Sensor Based on TGV Technology

 ,
,
Abstract
1. Introduction
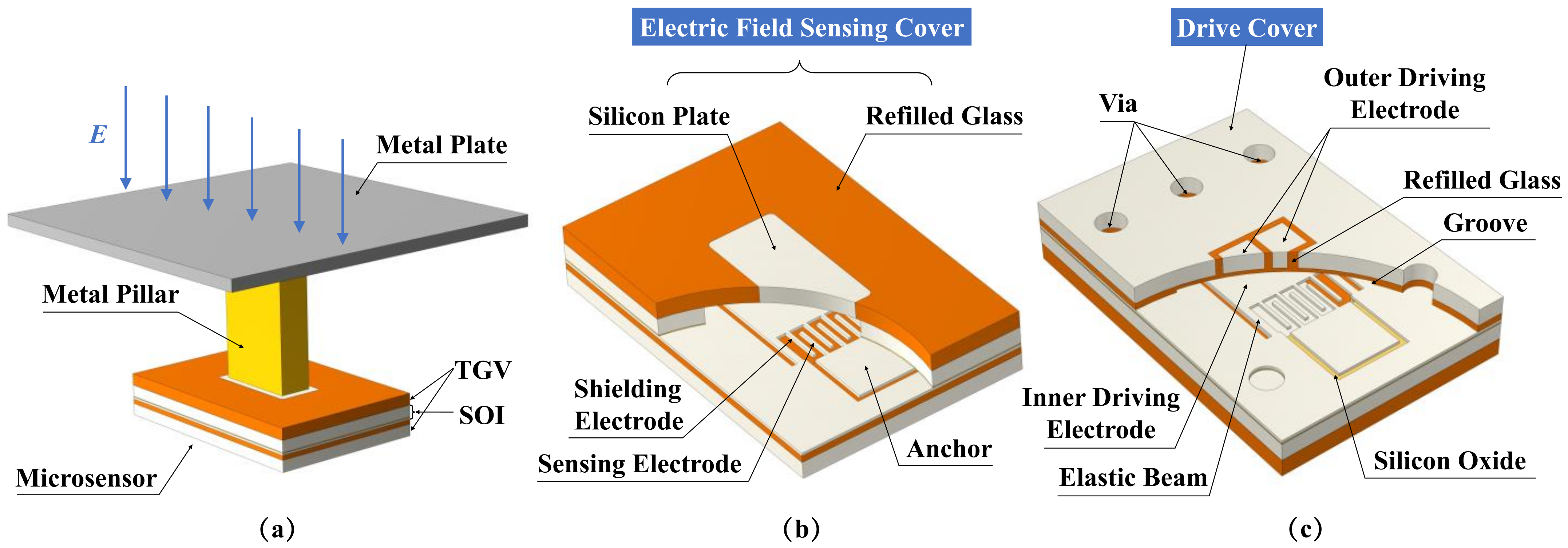
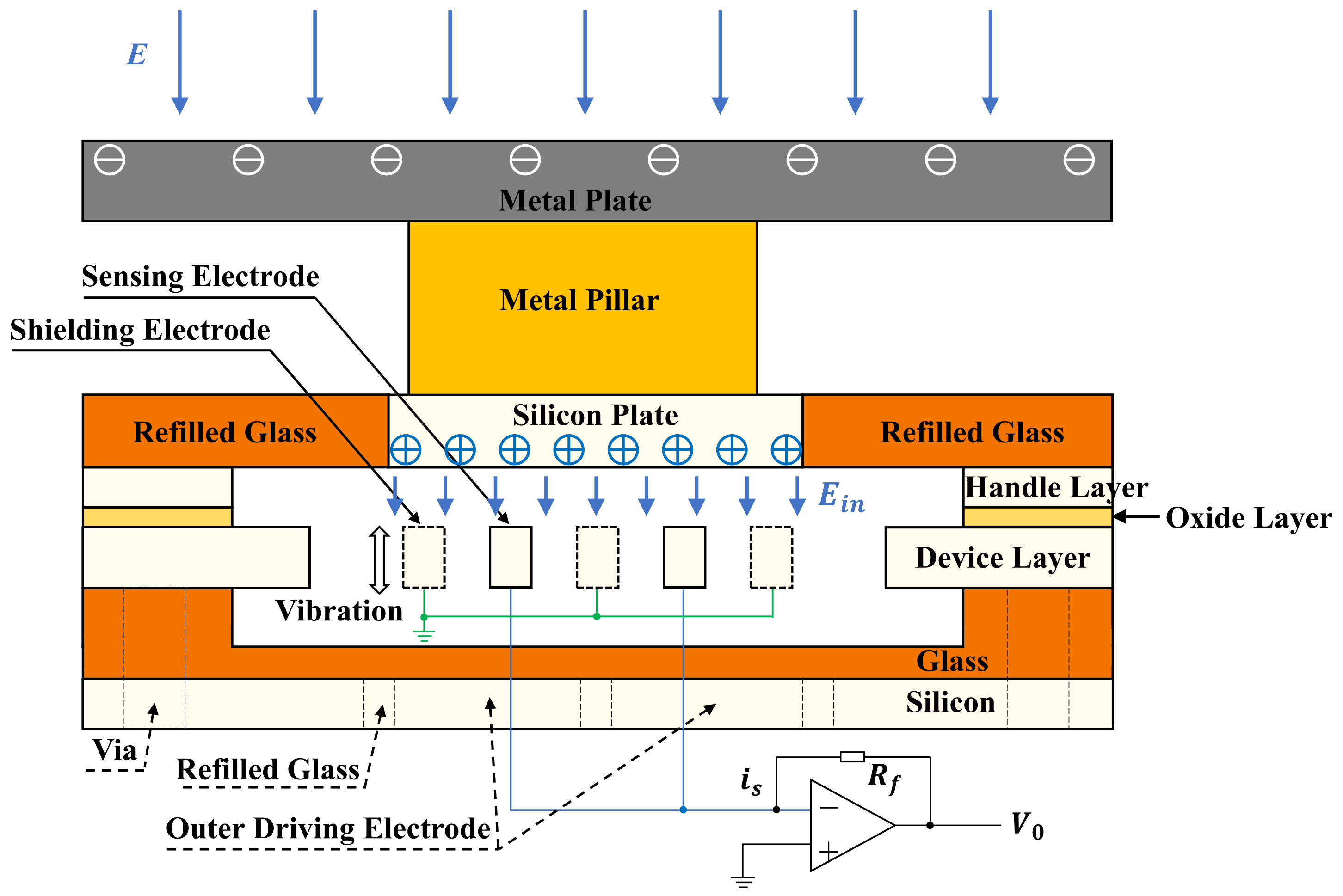
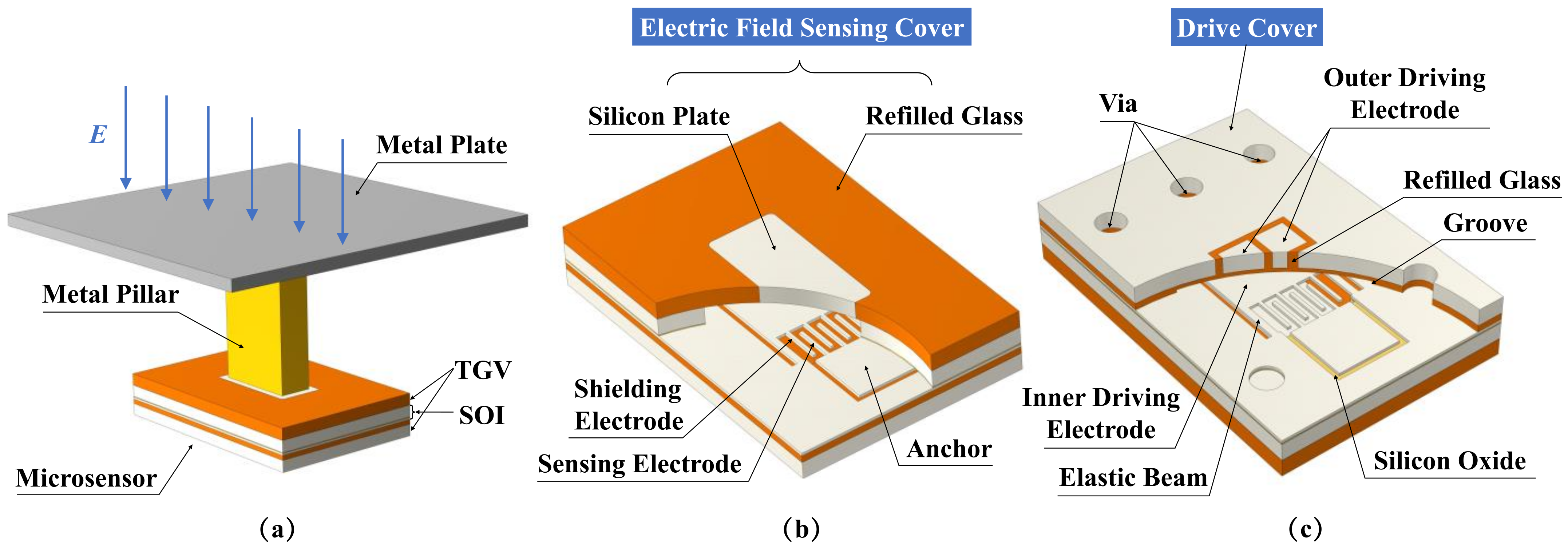
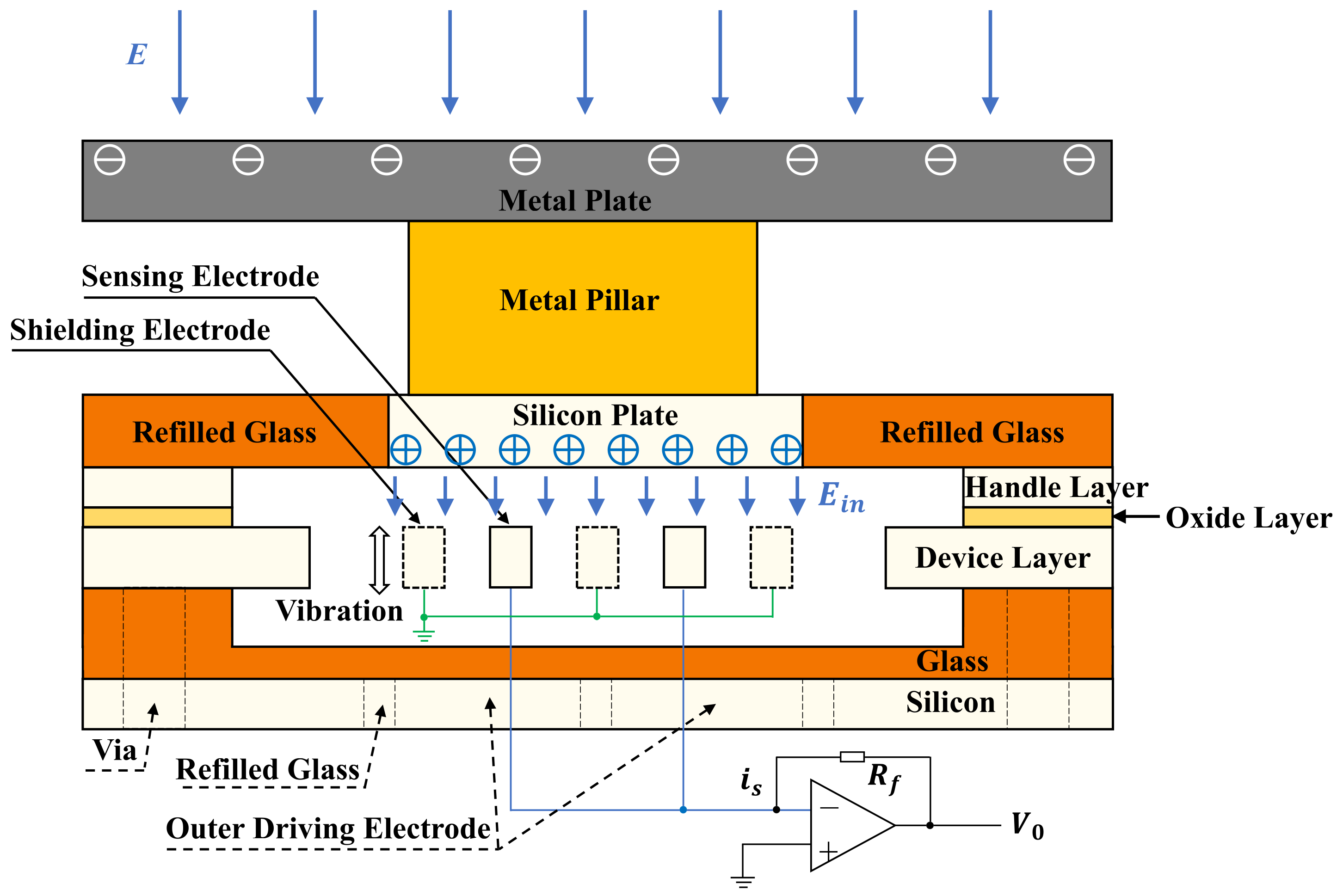
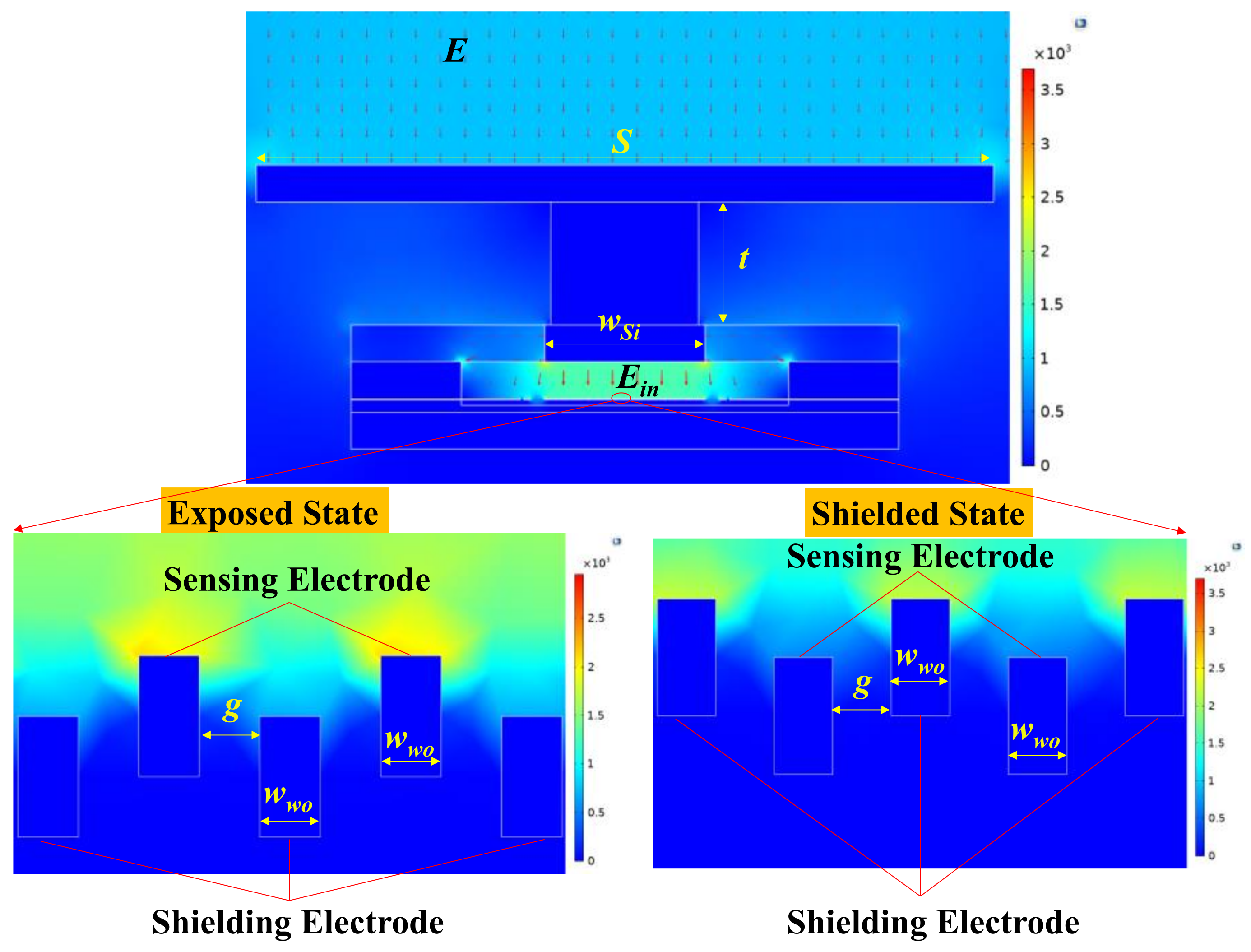
2. Structure Design and Working Principle
3. Simulation
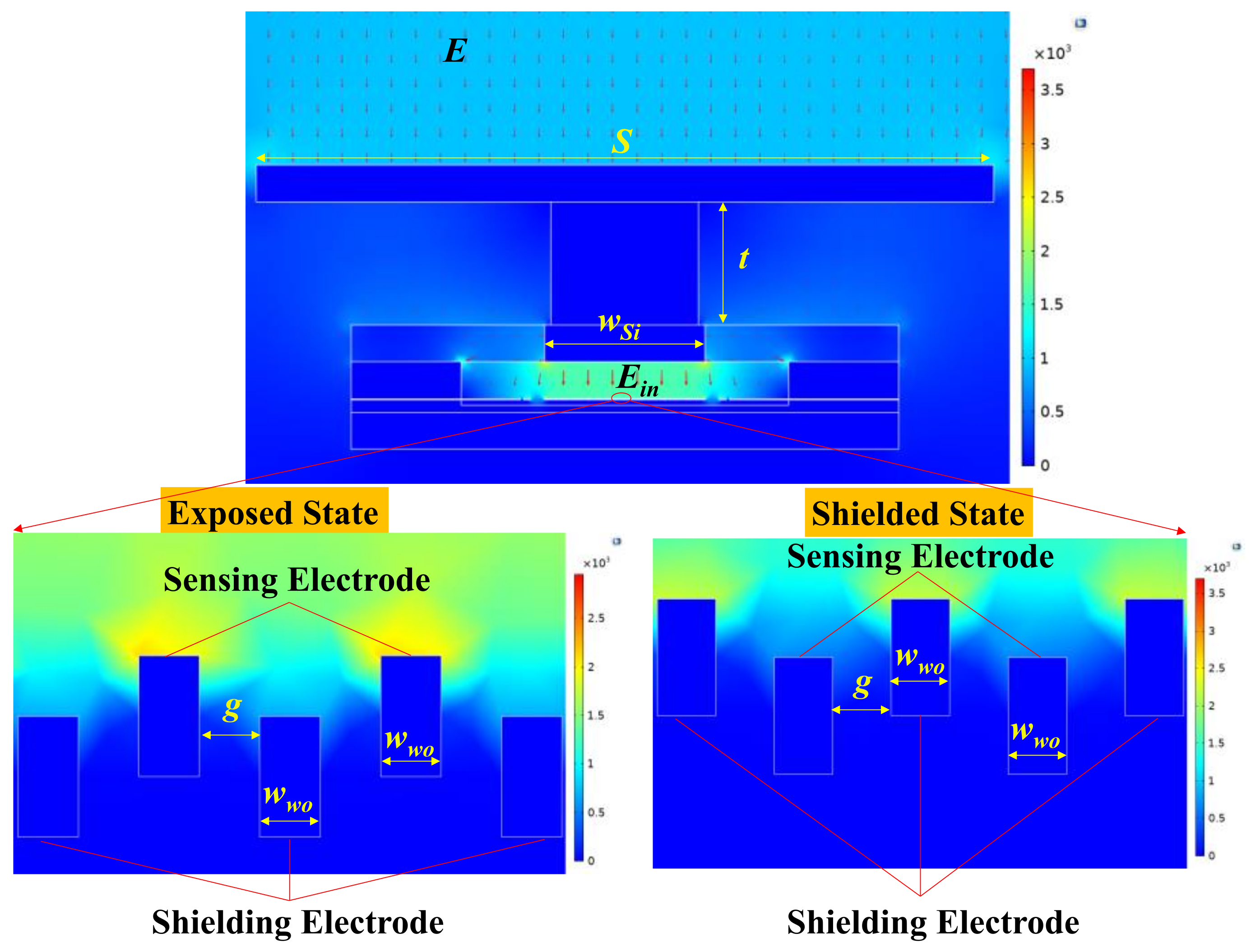
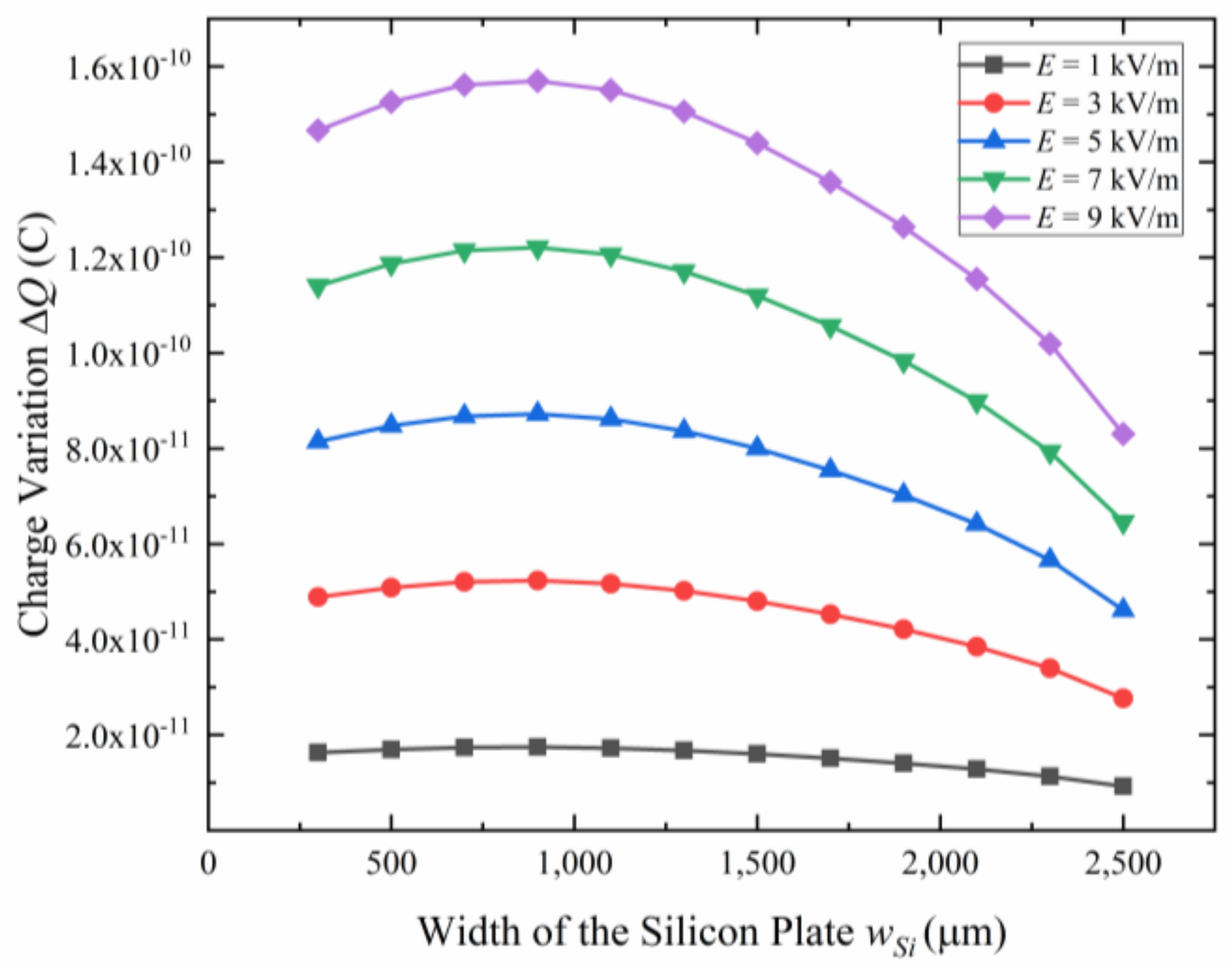
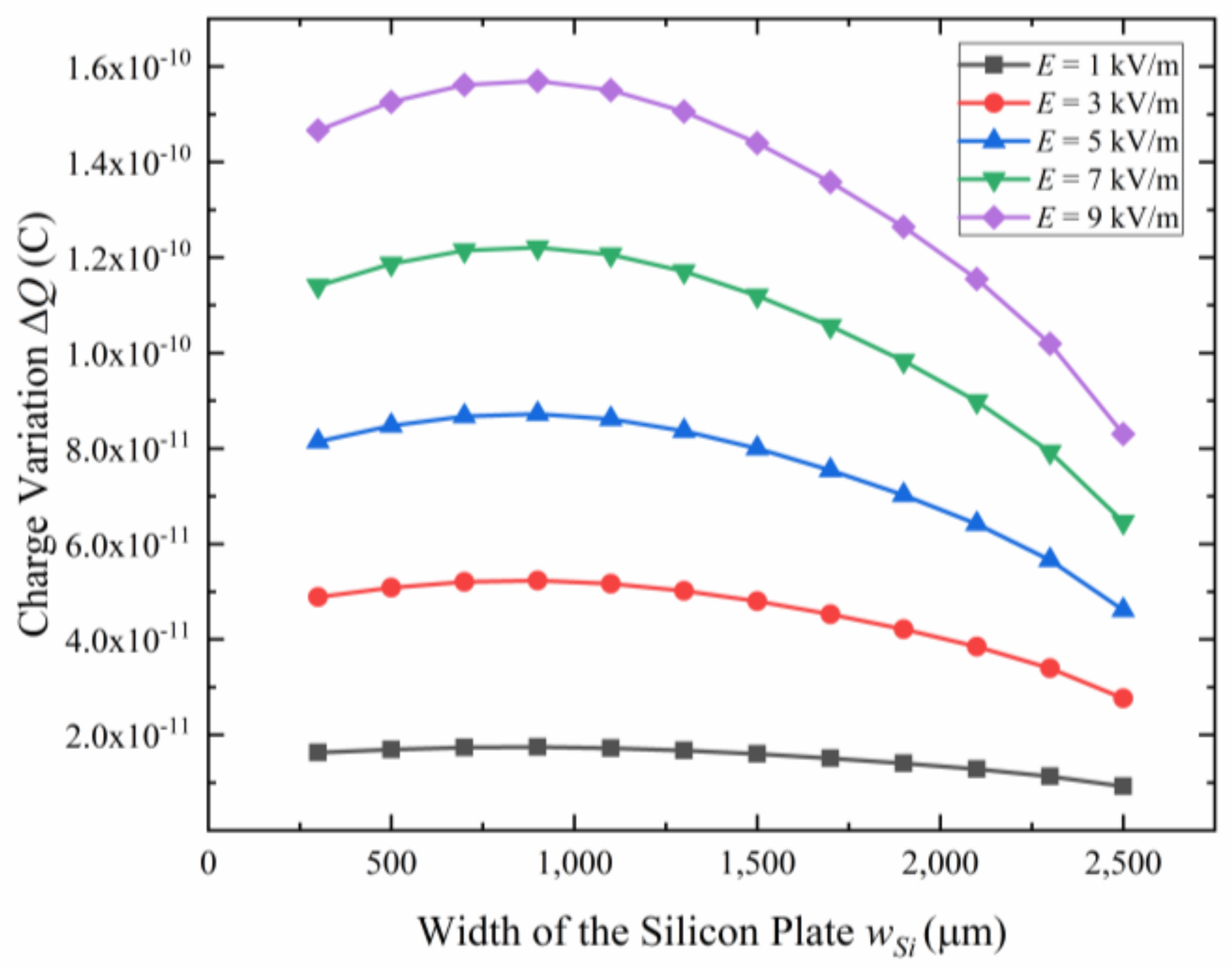
3.1. Optimization of the Width of the Silicon Plate
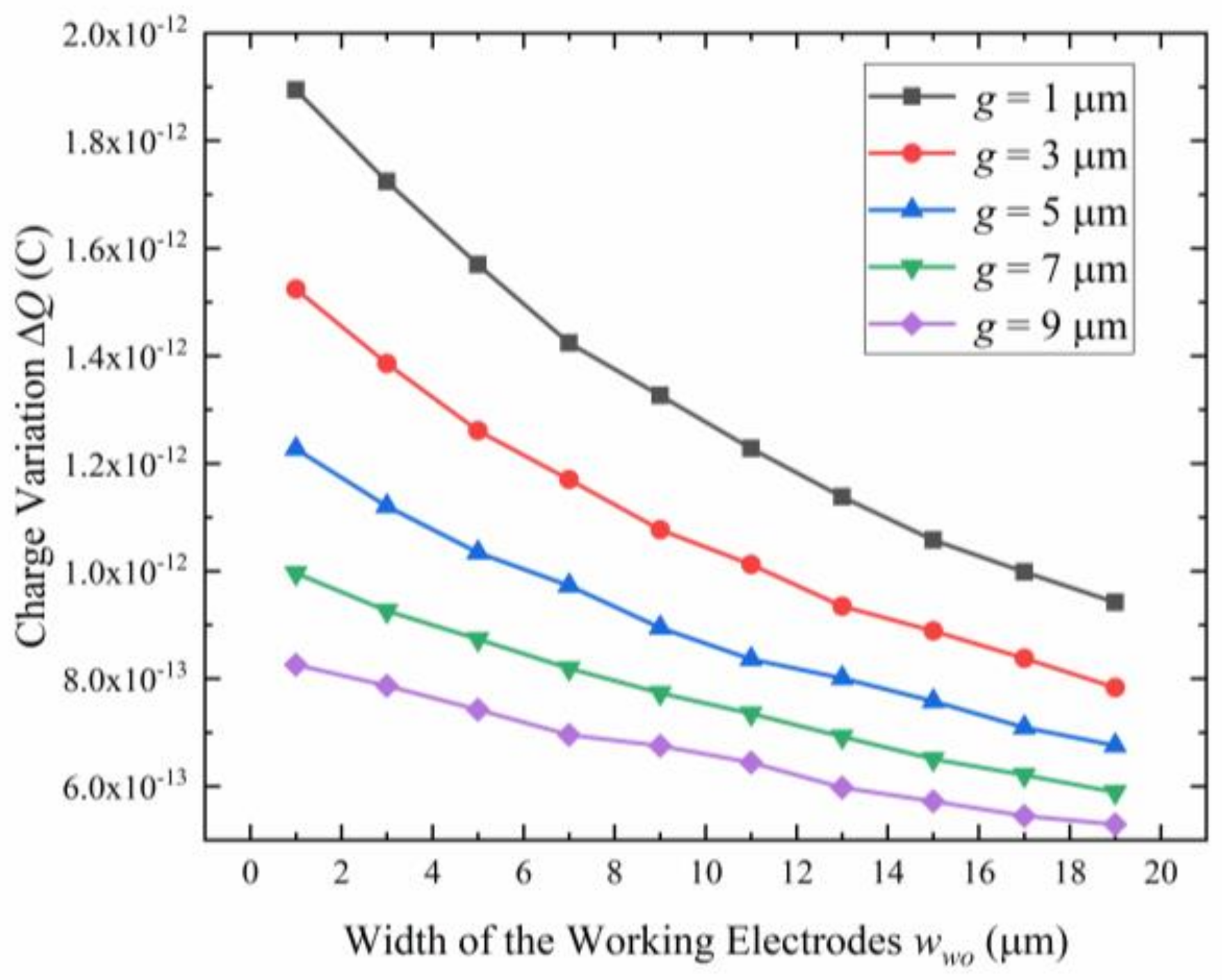
3.2. Optimization of the Working Electrodes
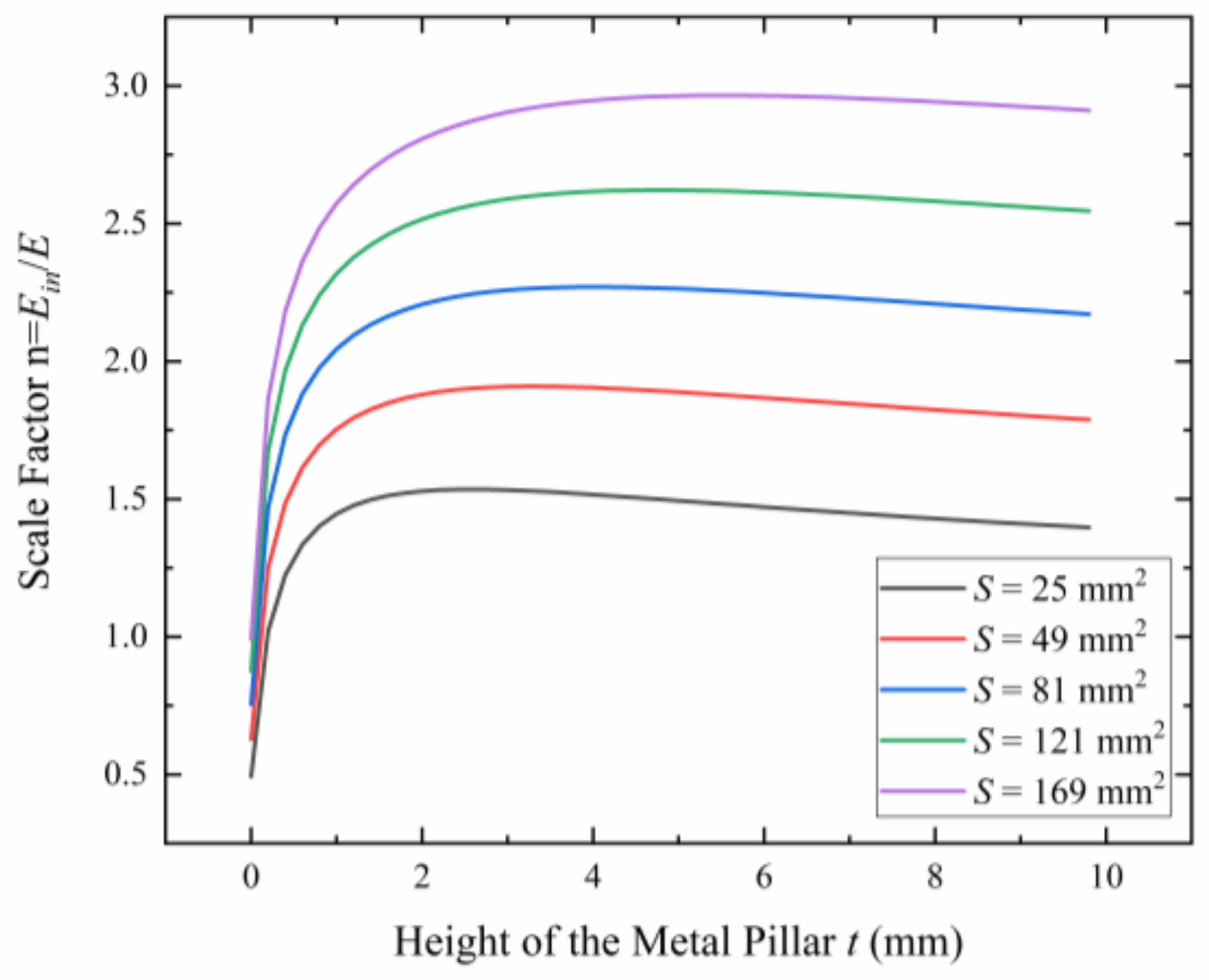
3.3. Optimization of the Height of the Metal Pillar
4. Device Fabrication
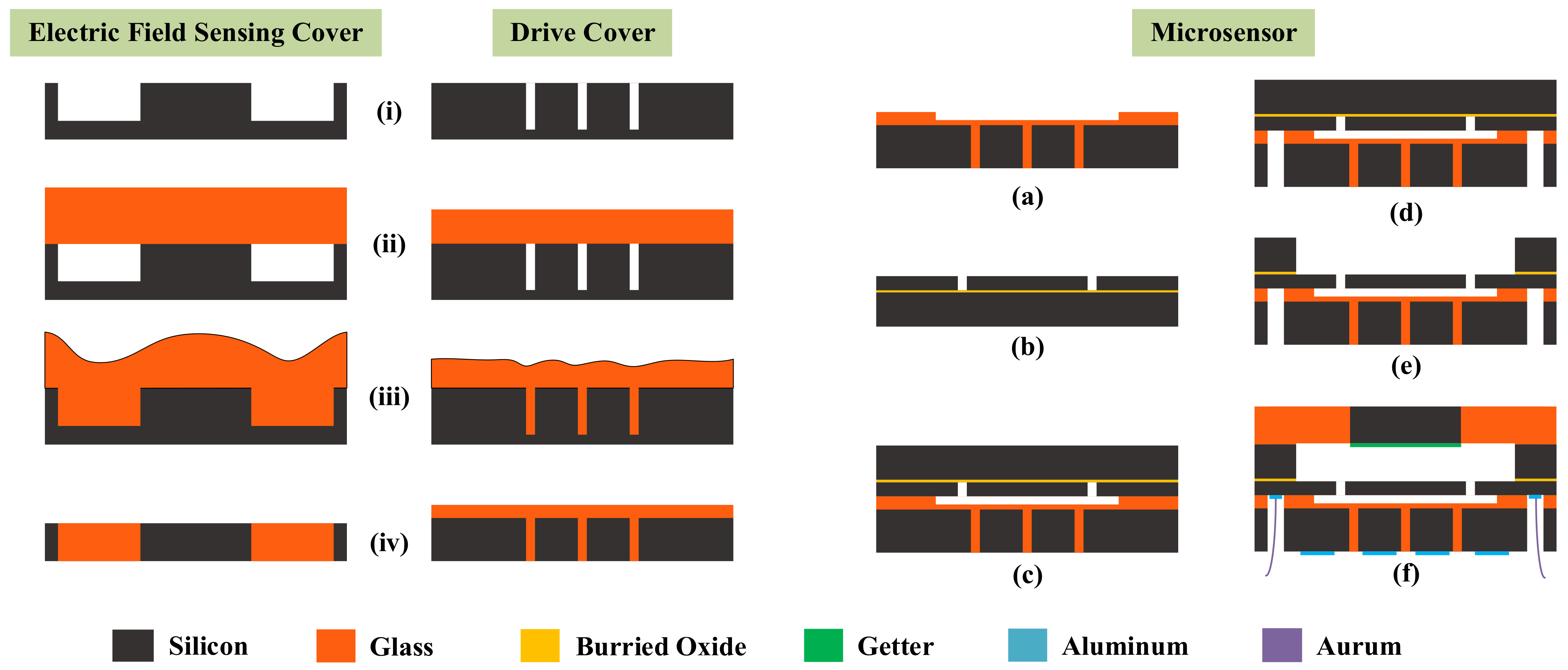
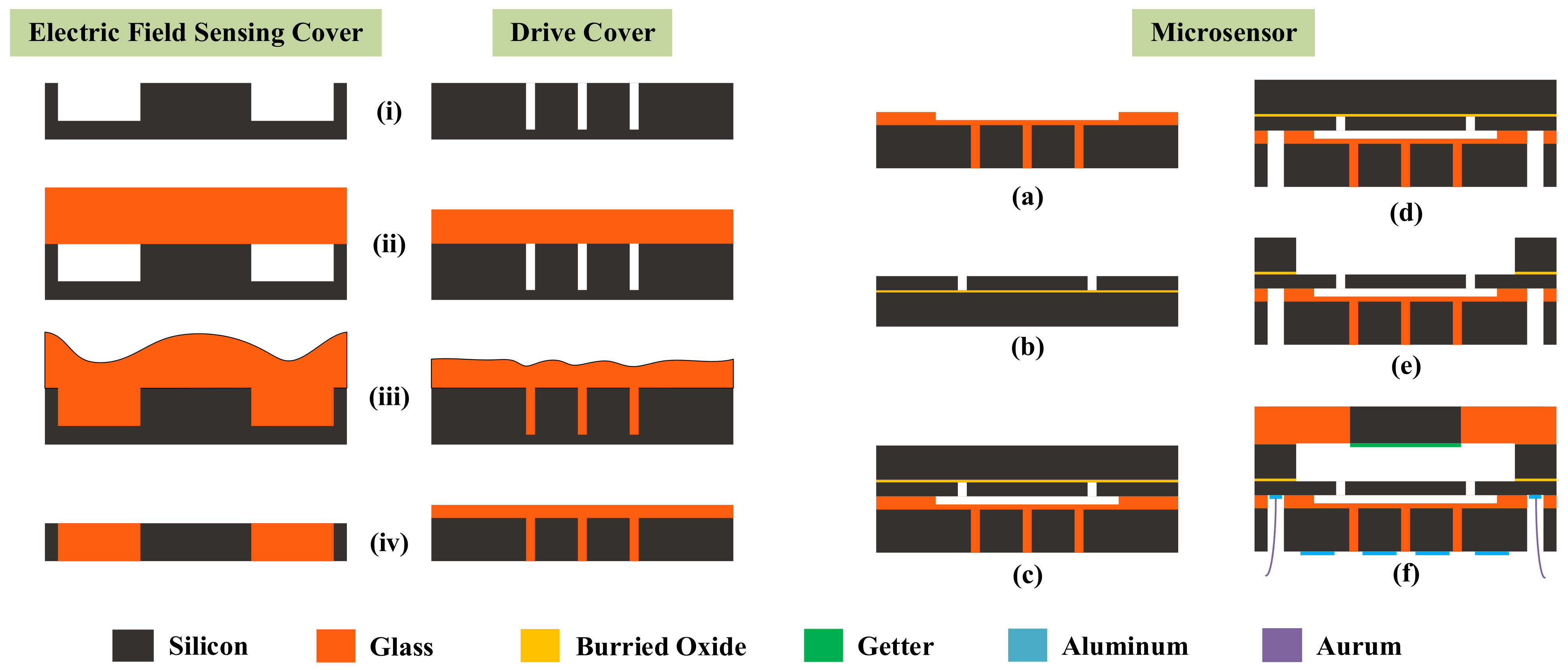
4.1. Preparation of the TGV Wafers
- (i)
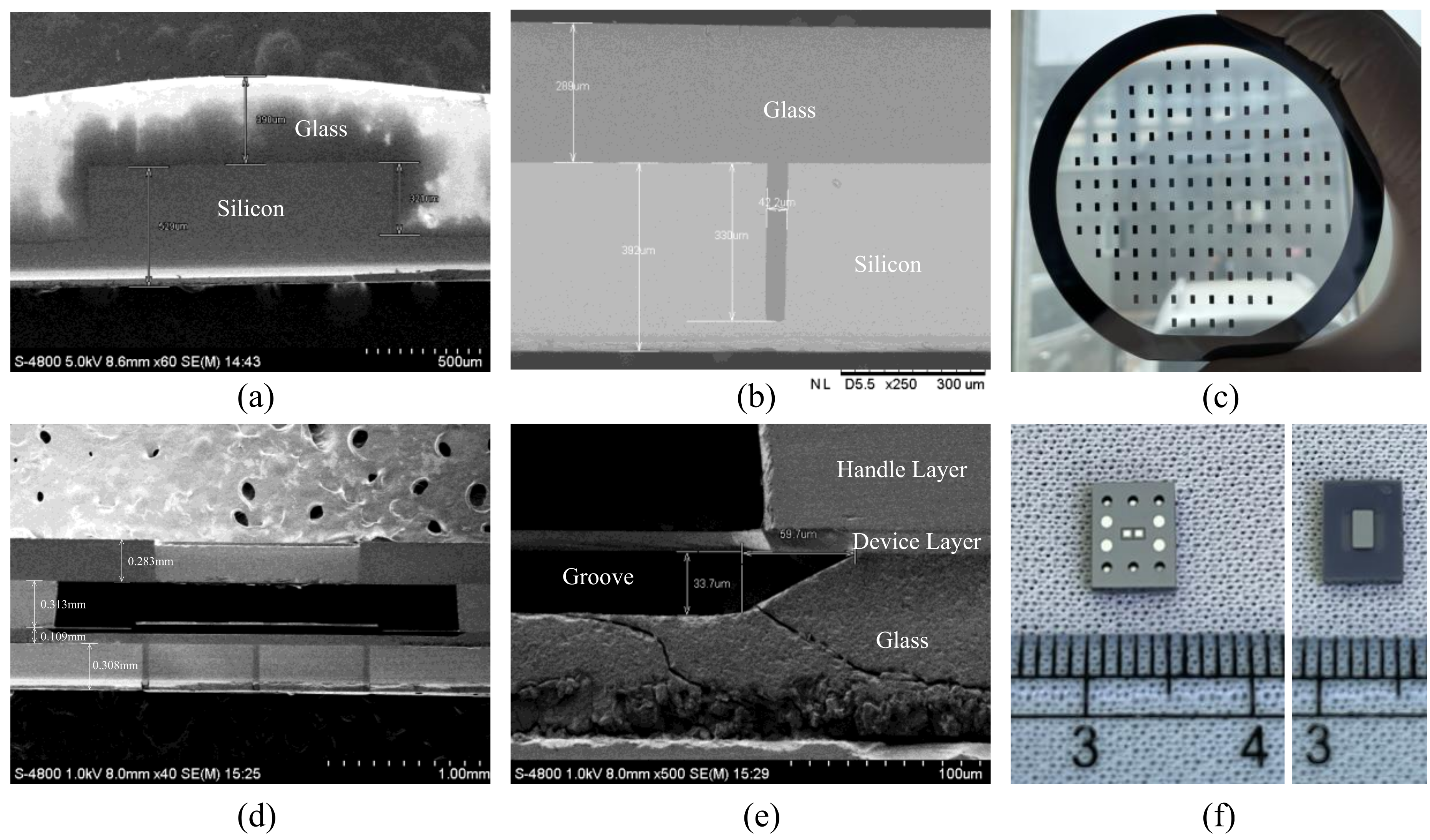
- A 530 μm thick highly-doped silicon wafer is etched 320 μm deep in an AMS-100 DRIE (Deep Reactive Ion Etching) system produced by Alcatel from France, forming a mold. A 390 μm thick highly-doped silicon wafer is etched 330 μm deep in an Omega Lpx Rapier DRIE system produced by SPTS Technologies Ltd. from Britain.
- (ii)
- The etched silicon wafers are anodically bonded to a 500 μm thick borosilicate glass (BF33) wafer and a 300 μm thick BF33 glass wafer, respectively, in vacuum conditions using a SB6e bonder produced by SUSS MicroTec from Germany at voltages of 1000 V and 800 V, respectively, with a pressure of 800 mBar.
- (iii)
- The bonded wafer is heated in a muffle furnace produced by FNS Electric Furnace Co., Ltd. from China (900 °C for 5 h) to reflow the glass into the silicon mold under atmospheric pressure.
- (iv)
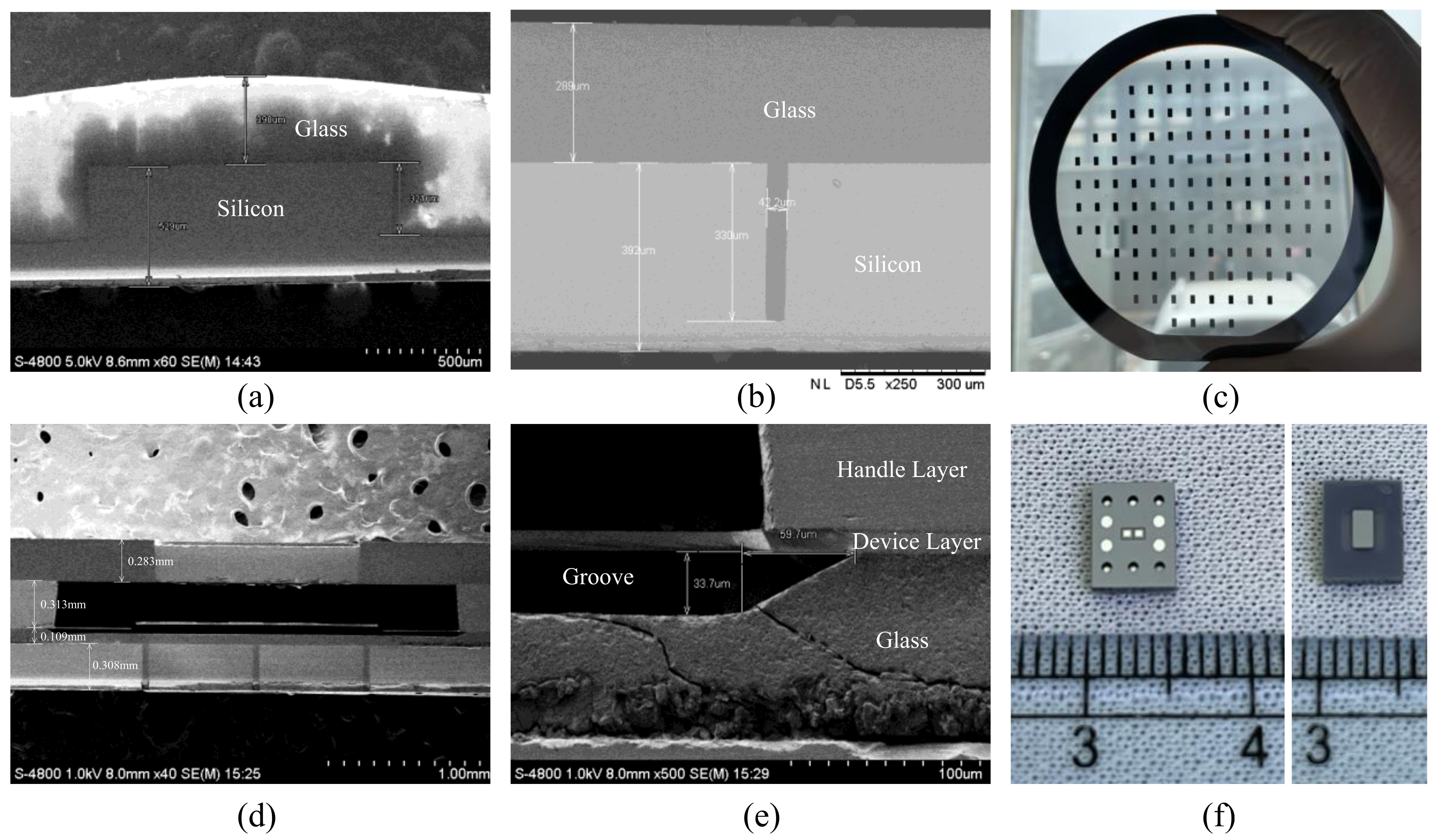
- The reflowed glass surface and the back surface are chemically and mechanically polished (CMP) using a GNAD61 precision grinding and polishing machine produced by FEE Company from Germany. The total thickness variation (TTV) of the wafer after CMP is within 5 μm and the roughness of the wafer after CMP is less than 50 Å, which fully meets the requirements of anodic bonding.
4.2. Fabrication Process of the Microsensor
- (a)
- The hydrofluoric acid vapor is utilized to corrode a 30 μm deep groove at the glass layer of the drive cover, which is used to provide the vertical vibration space for the resonator.
- (b)
- The device layer of SOI is etched in a HSE M200 DRIE system produced by NAURA Company from China by which the resonator, the sensing electrodes, and the anchors are patterned.
- (c)
- The SOI wafer and the drive cover are anodically bonded in vacuum conditions using an SUSS SB6e bonder at a voltage of 430 V with a pressure of 400 mBar.
- (d)
- DRIE and hydrofluoric acid vapor are used successively to etch the holes used for lead wires. DRIE is conducted in a NAURA HSE M200 DRIE system.
- (e)
- DRIE is used to etch the handle layer of SOI to form the vibration cavity and RIE (Reactive Ion Etching) is used to etch the buried oxide layer of SOI to release the movable structure in the NAURA HSE M200 DRIE system.
- (f)
- The getter (1 μm thick Ti) is deposited on the surface of the silicon plate using a BJD-2000 electron beam evaporation system produced by Ferrotec from Japan. The electric field sensing cover and the released wafer are anodically bonded in the SUSS SB6e bonder at a voltage of 800 V with a pressure of 400 mBar. Finally, 1 μm thick aluminum pads are deposited on the areas that need lead wires in a Ferrotec BJD-2000 electron beam evaporation system.
5. Experiment
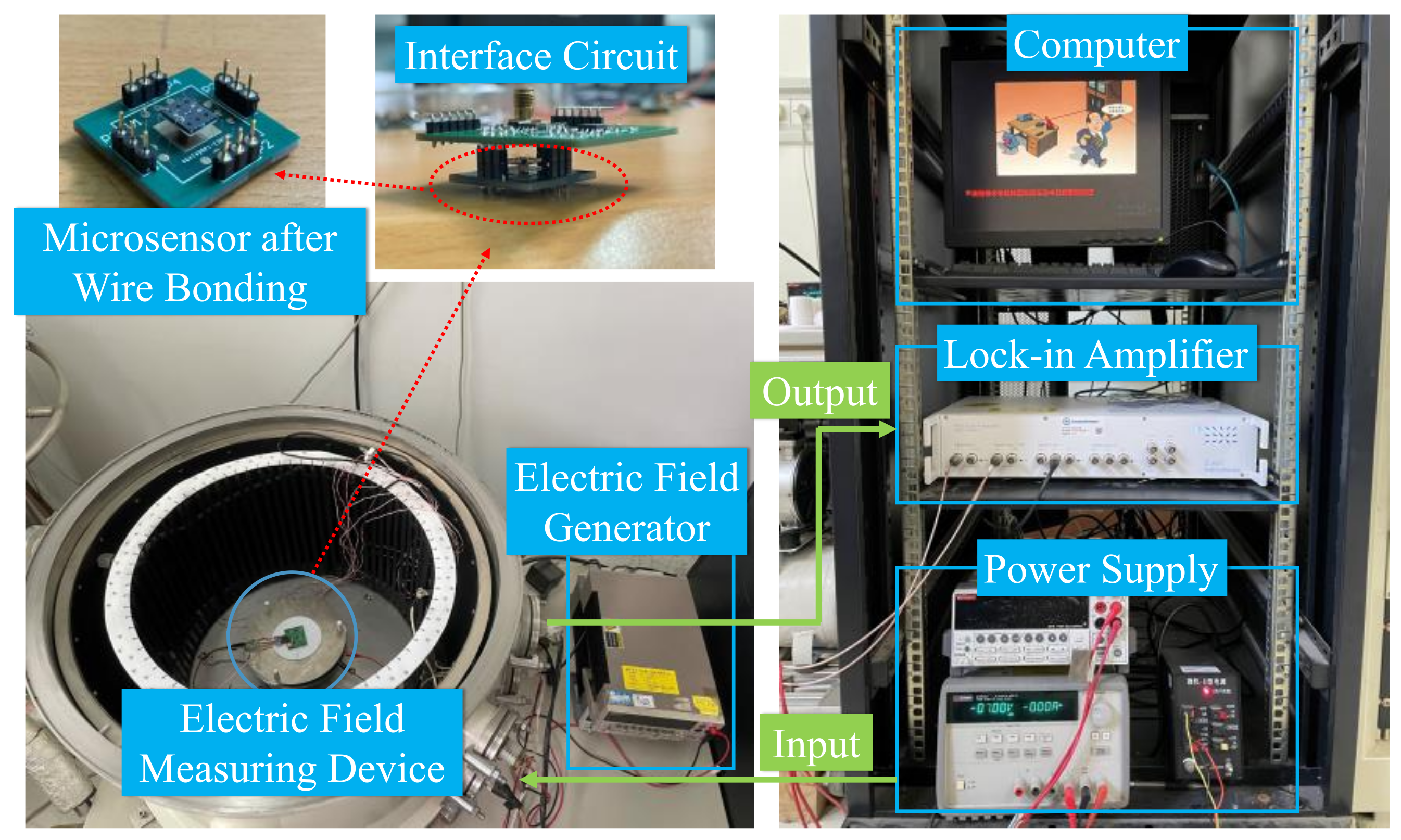
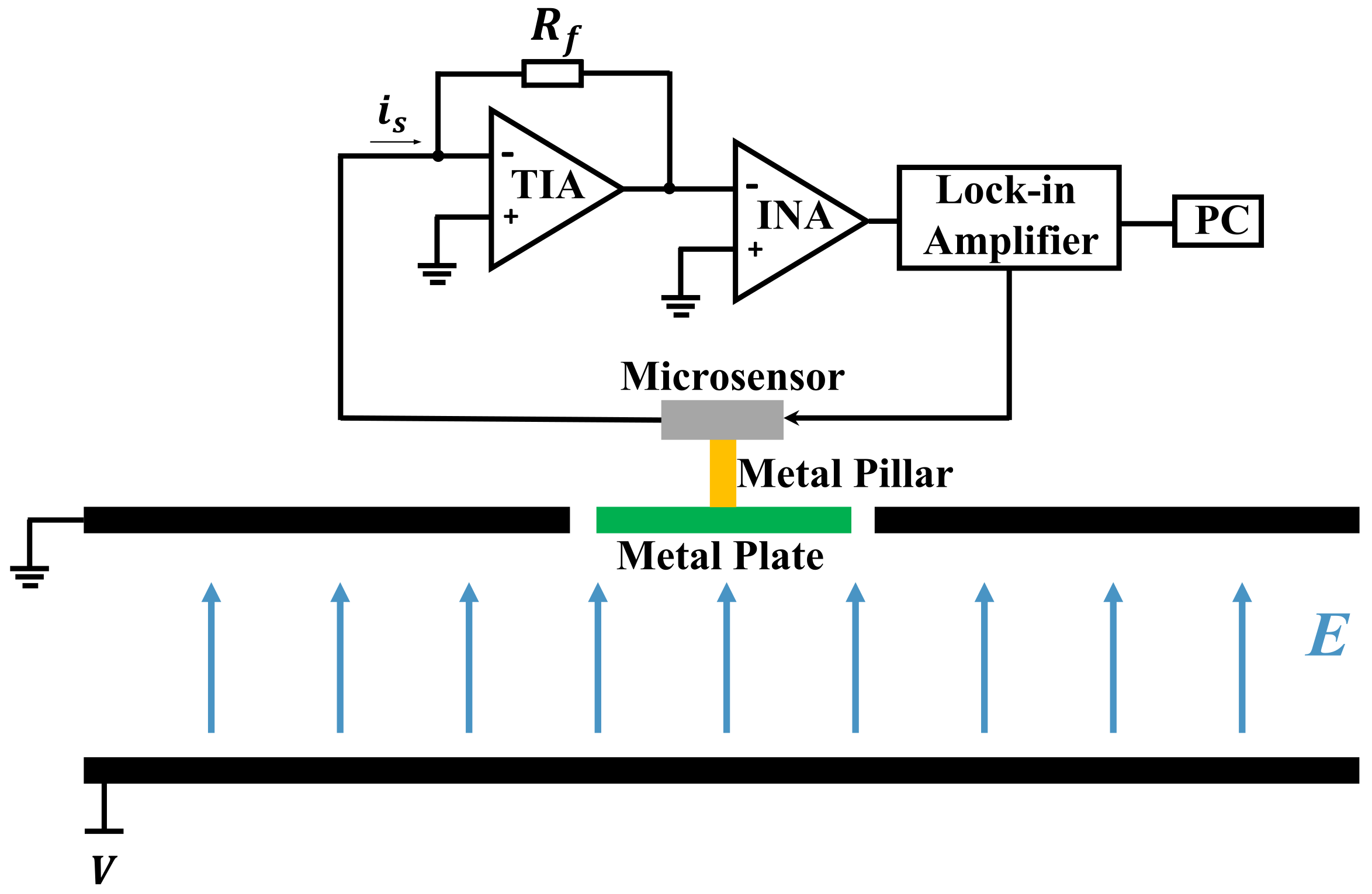
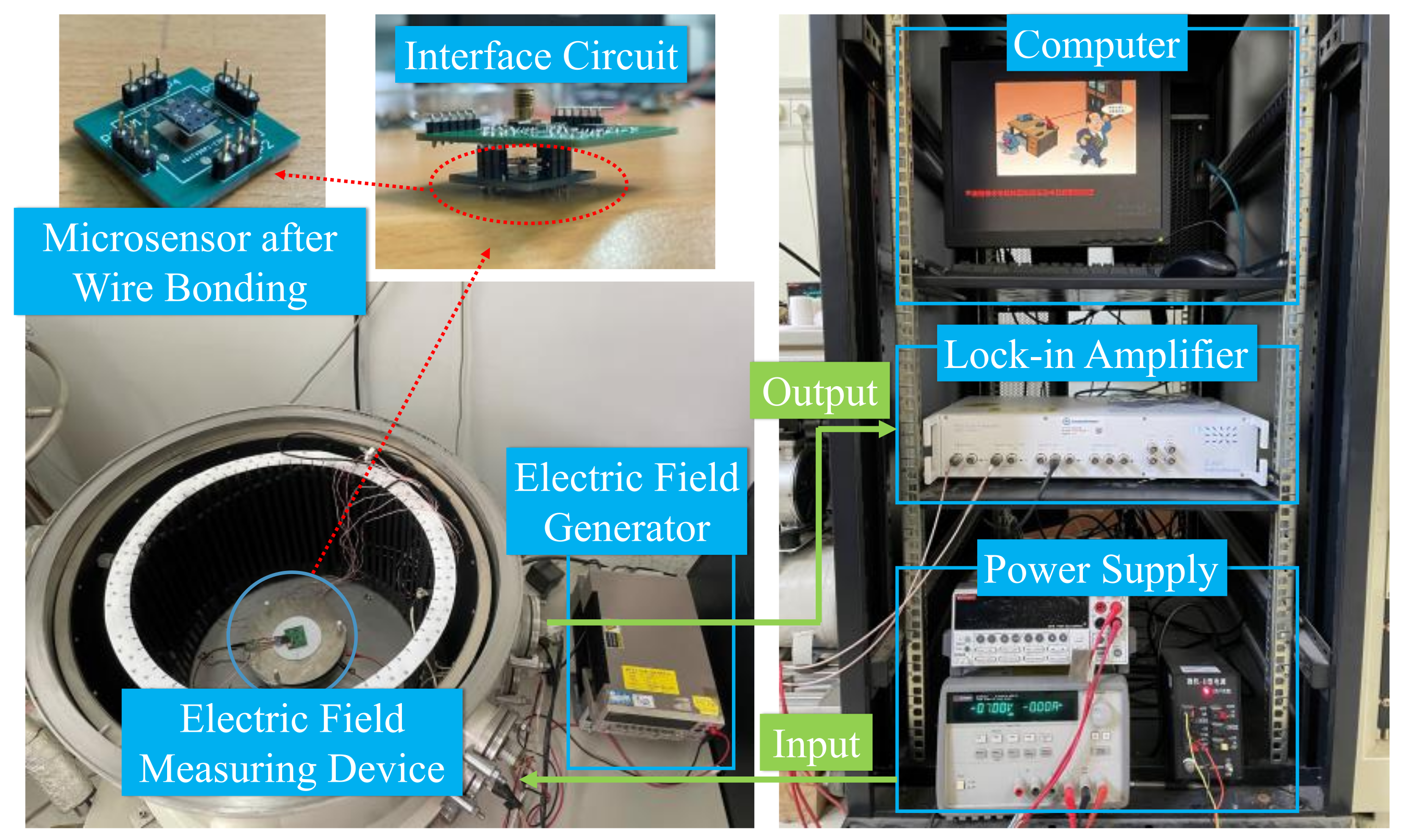
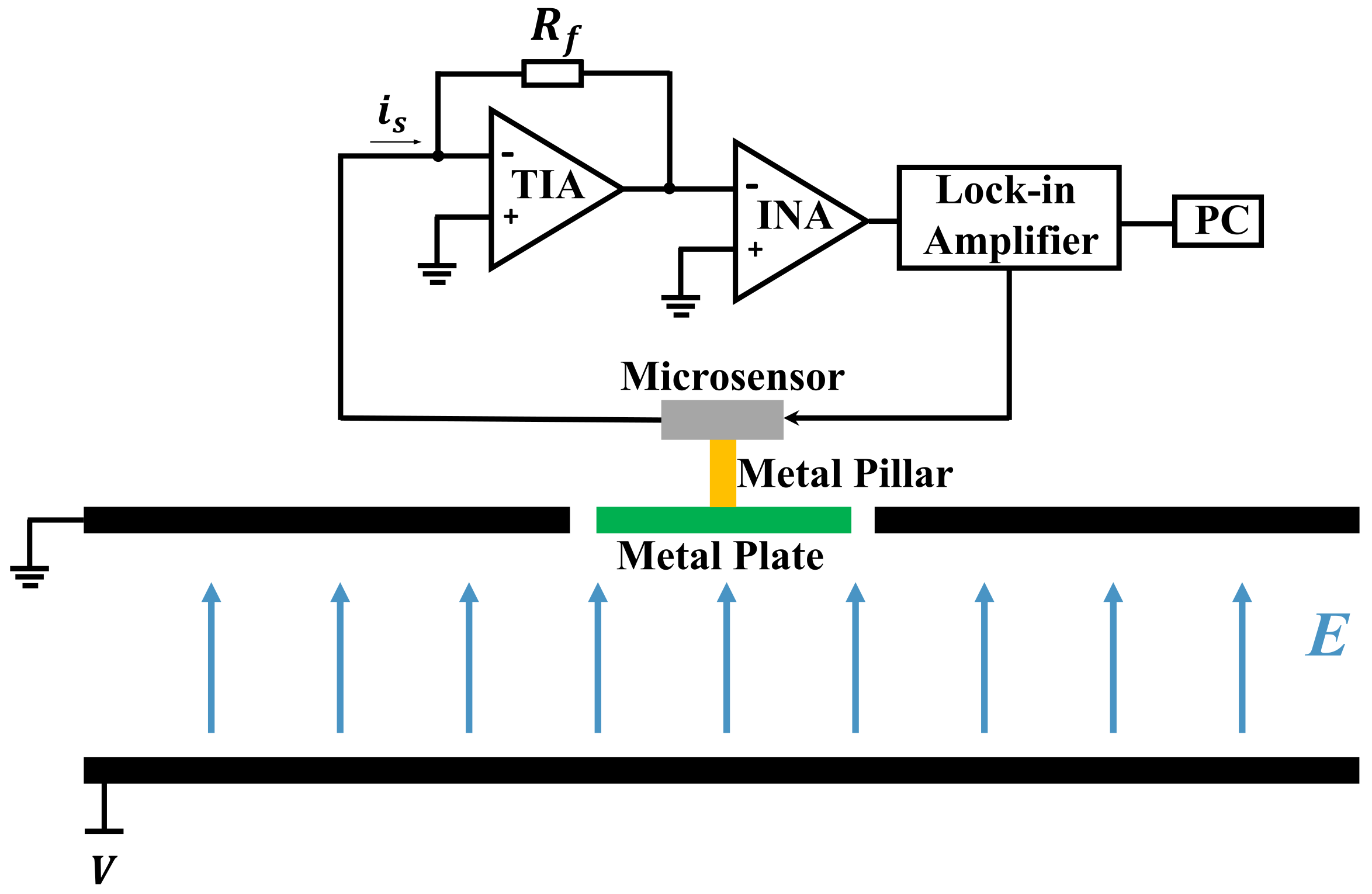
5.1. Experiment Setup
5.2. Experimental Results
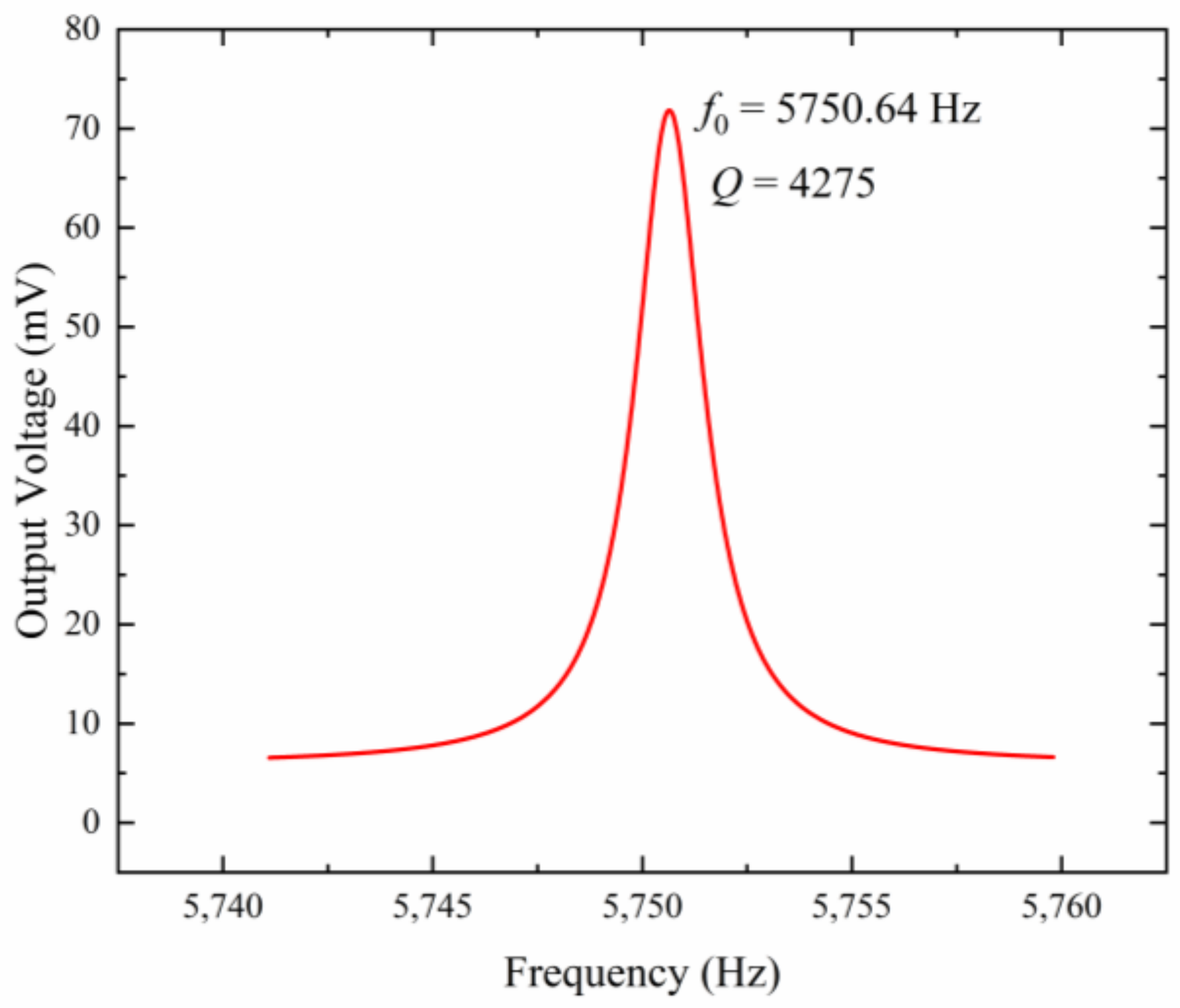
5.2.1. Amplitude–Frequency Characteristics
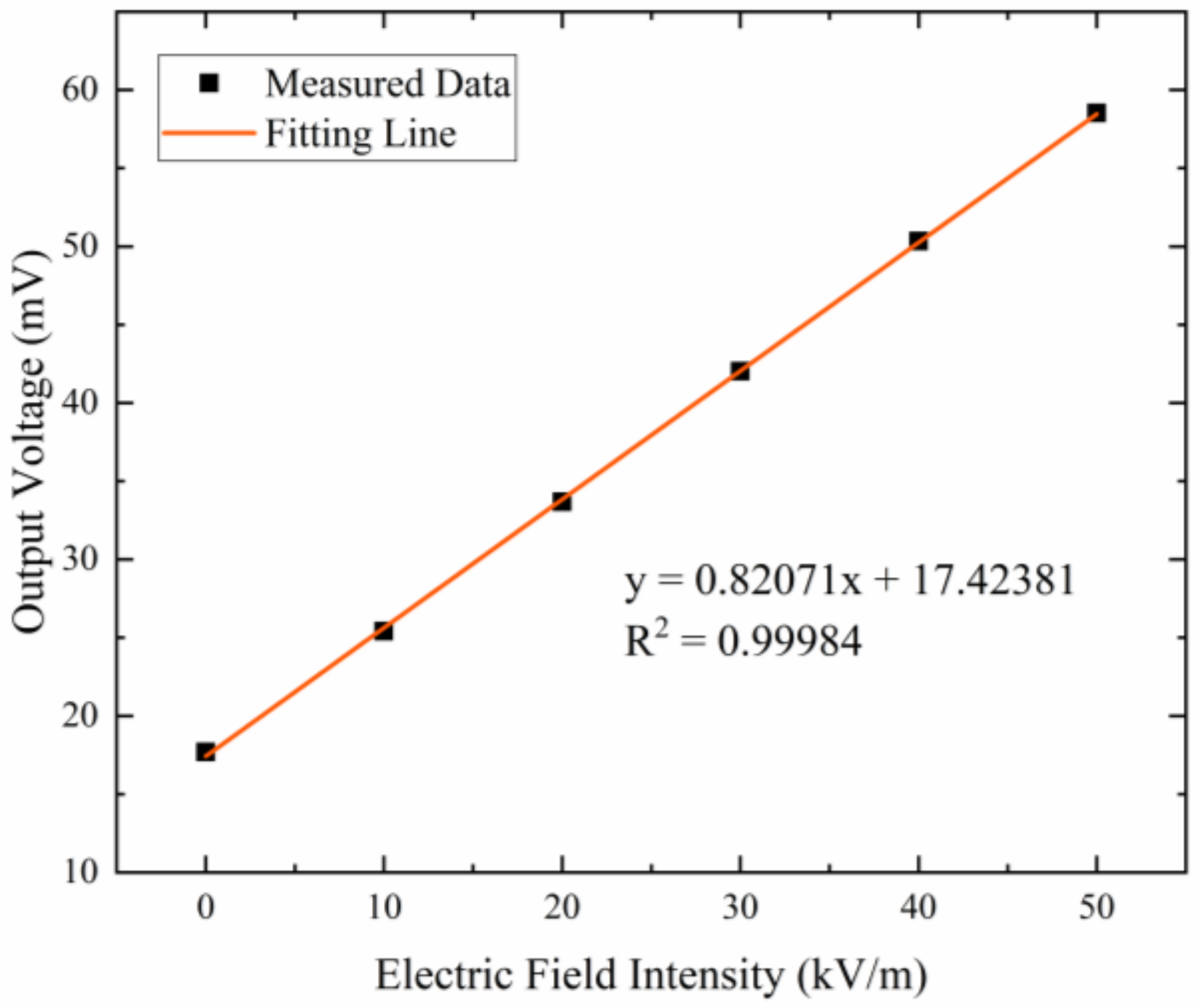
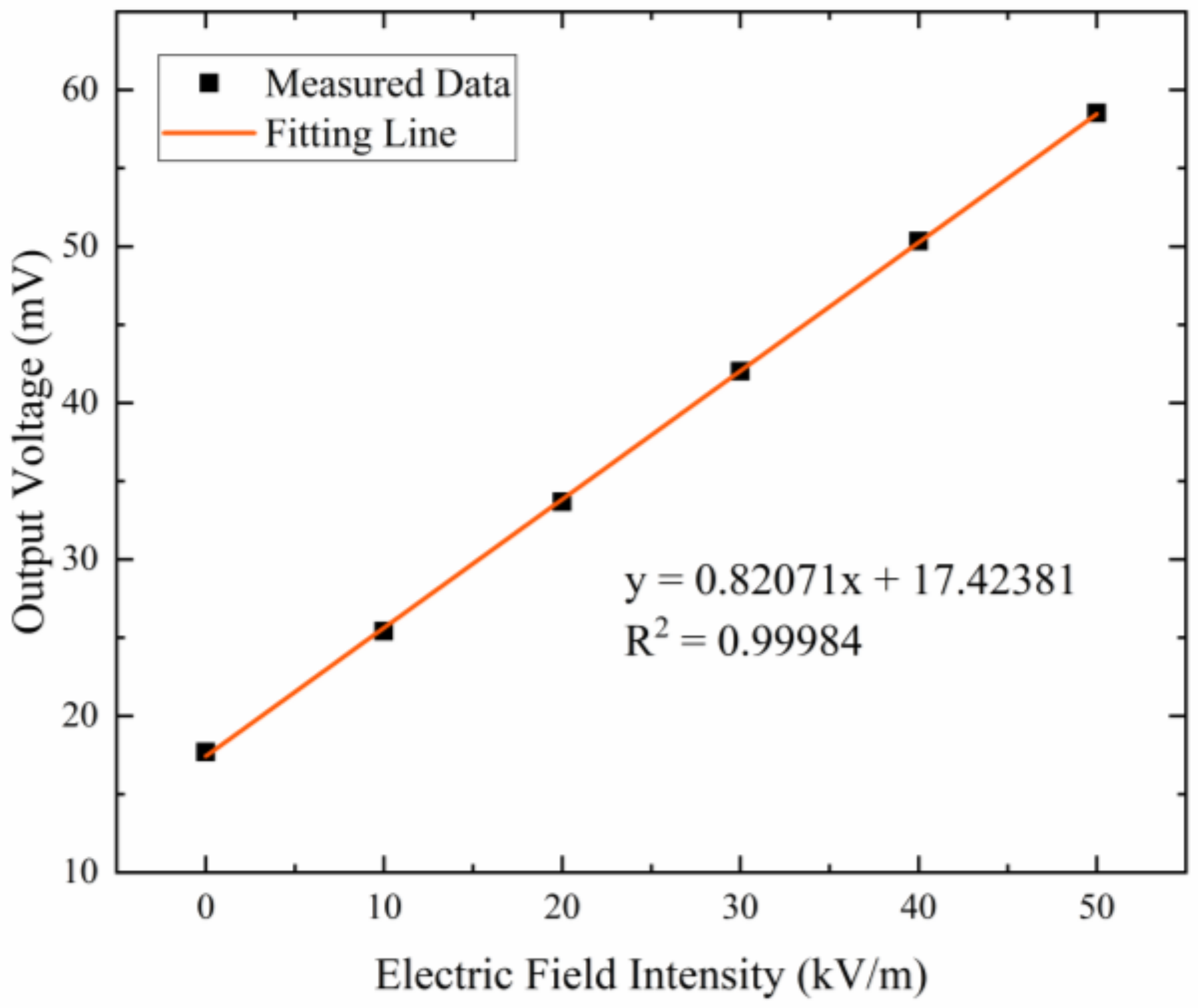
5.2.2. Sensitivity Characteristics
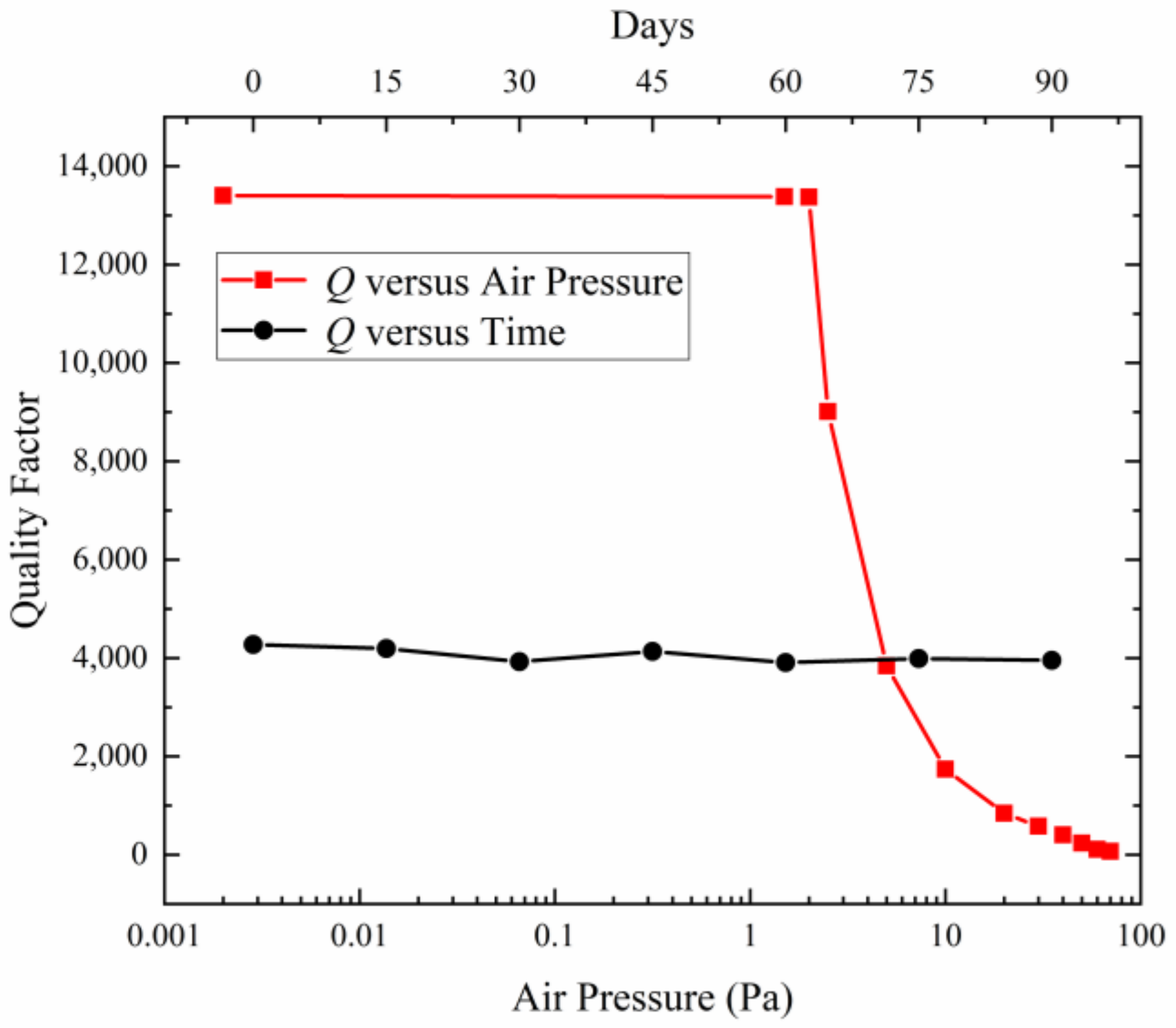
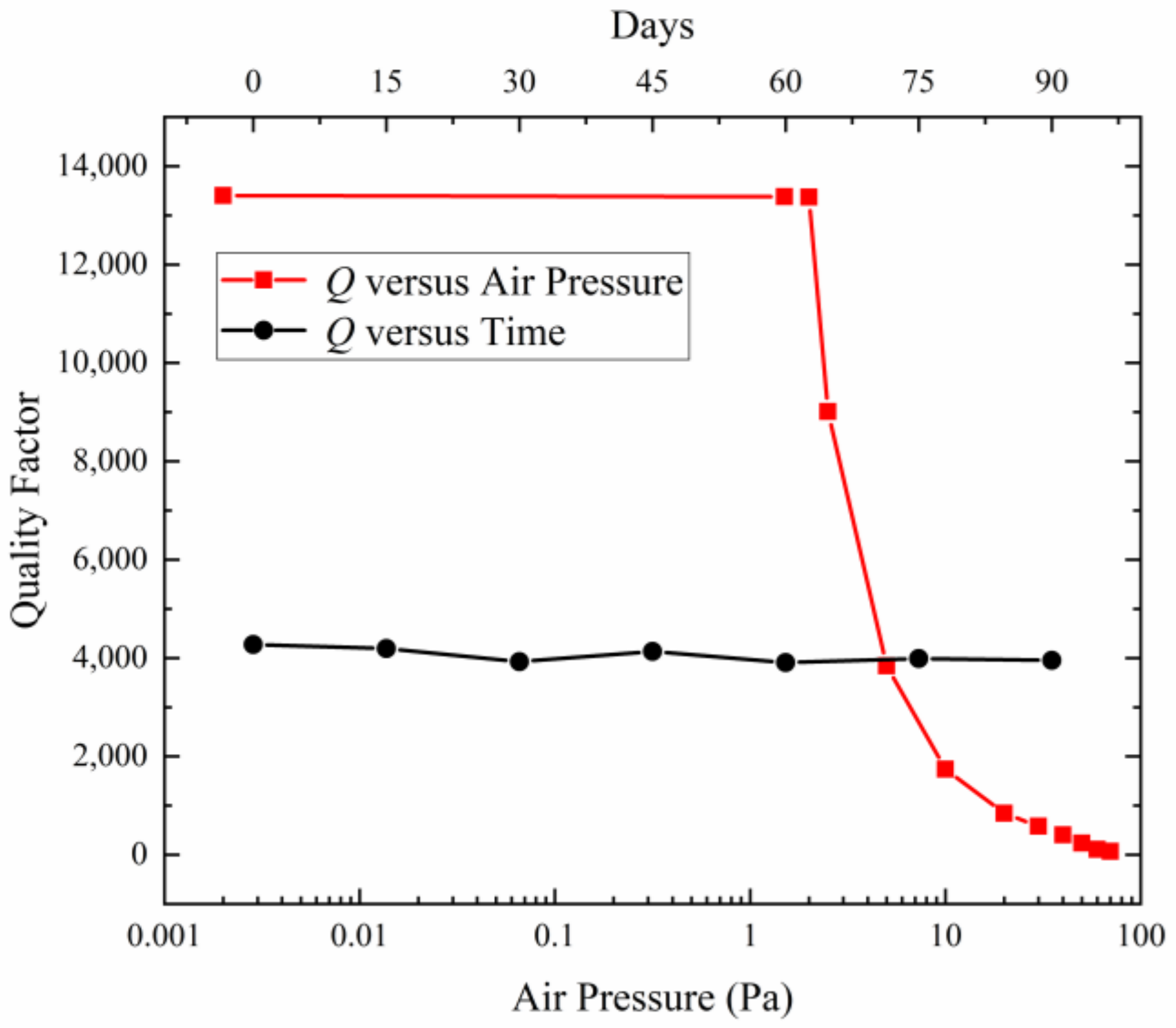
5.2.3. Quality Factor Test
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zeng, S.; Powers, J.R.; Newbraugh, B.H. Effectiveness of a worker-worn electric-field sensor to detect power-line proximity and electrical-contact. J. Saf. Res. 2010, 41, 229–239. [Google Scholar] [CrossRef]
- Wang, K.; Zhao, Y.; Yuan, S.; Cai, X.; Duan, X.; Zhang, H. The Crack Defect Detection Method of 220 kV GIS Basin-Type Insulators Based on Electric Field Calculation and Modal Analysis. Power Syst. Clean Energy 2021, 37, 32–38. [Google Scholar]
- Luo, F. Lightning strike aircraft event and launch standards for US space activities. Aerosp. China 1993, 27–29. [Google Scholar]
- Gao, C.; Song, S.; Guo, Y.; Yang, Q. Study of numerical simulation of aircraft attachment points and lightning zoning. Chin. J. Radio Sci. 2012, 27, 1238–1243. [Google Scholar]
- Montanya, J.; Bergas, J.; Hermoso, B. Electric field measurements at ground level as a basis for lightning hazard warning. J. Electrost. 2004, 60, 241–246. [Google Scholar] [CrossRef]
- Wen, X.; Yang, P.; Chu, Z.; Peng, C.; Liu, Y.; Wu, S. MEMS-based electric field sensor with environmental adaptability consideration and its application in the near-ground atmosphere. J. Phys. Conf. Ser. 2021, 1775, 012003. [Google Scholar]
- Yang, G.; Wen, W. Electrostatic protection technology in semiconductor device industry production. Electron. Technol. Softw. Eng. 2021, 77–78. [Google Scholar]
- Shi, Y. Analysis of static electricity hazards and preventive measures in petrochemical enterprises. Clean. World 2022, 38, 41–43. [Google Scholar]
- Peng, C.; Chen, X.; Bai, Q.; Luo, L.; Xia, S. A novel high performance micromechanical resonant electrostatic field sensor used in atmospheric electric field detection. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, Istanbul, Turkey, 22–26 January 2006. [Google Scholar]
- Yang, P.; Peng, C.; Fang, D.; Wen, X.; Xia, S. Design, fabrication and application of an SOI-based resonant electric field microsensor with coplanar comb-shaped electrodes. J. Micromechanics Microengineering 2013, 23, 055002. [Google Scholar] [CrossRef]
- Chu, Z.; Peng, C.; Ren, R.; Ling, B.; Zhang, Z.; Lei, H.; Xia, S. A high sensitivity electric field microsensor based on torsional resonance. Sensors 2018, 18, 286. [Google Scholar] [CrossRef]
- Lei, H.; Xia, S.; Chu, Z.; Ling, B.; Peng, C.; Zhang, Z.; Liu, J.; Zhang, W. An electric field microsensor with mutual shielding electrodes. Micromachines 2021, 12, 360. [Google Scholar] [CrossRef] [PubMed]
- Bahreyni, B.; Wijeweera, G.; Shafai, C.; Rajapakse, A. Analysis and design of a micromachined electric-field sensor. J. Microelectromechanical Syst. 2008, 17, 31–36. [Google Scholar] [CrossRef]
- Bai, M.; Zhao, Y.; Jiao, B.; Zhai, X.; Geng, Y. A novel easy-driving and easy-signal-processing electrostatic field sensor based on a piezoresistance and polyethylene terephthalate lever. J. Micromechanics Microengineering 2017, 27, 035002. [Google Scholar] [CrossRef]
- Kainz, A.; Steiner, H.; Schalko, J.; Jachimowicz, A.; Kohl, F.; Stifter, M.; Beigelbeck, R.; Keplinger, F.; Hortschitz, W. Distortion-free measurement of electric field strength with a MEMS sensor. Nat. Electron. 2018, 1, 68–73. [Google Scholar] [CrossRef]
- Kainz, A.; Steiner, H.; Hortschitz, W.; Schalko, J.; Jachimowicz, A.; Keplinger, F. Improved reference-free vibration-suppressed optical MEMS electric field strength sensor. In Proceedings of the Transducers 2019-EUROSENSORS XXXIII, Berlin, Germany, 23–27 June 2019. [Google Scholar]
- Williams, K.R.; De Bruyker, D.P.; Limb, S.J.; Amendt, E.M.; Overland, D.A. Vacuum steered-electron electric-field sensor. J. Microelectromechanical Syst. 2013, 23, 157–167. [Google Scholar] [CrossRef]
- Zhang, H.; Fang, D.; Yang, P.; Peng, C.; Wen, X.; Xia, S. Humidity-induced charge leakage and field attenuation in electric field microsensors. Sensors 2012, 12, 5105–5115. [Google Scholar] [CrossRef]
- Wen, X.; Peng, C.; Fang, D.; Yang, P.; Chen, B.; Zheng, F.; Xia, S. High performance electric field micro sensor with combined differential structure. Chin. J. Electron. 2014, 31, 143–150. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, C.; Yang, P.; Wen, X.; Li, B.; Xia, S. Chip-level Vacuum Package and Test of Resonant MEMS Electric Field Sensor. J. Electron. Inf. Technol. 2015, 37, 2282–2286. [Google Scholar]
- Wen, X.; Yang, P.; Zhang, Z.; Chu, Z.; Peng, C.; Liu, Y.; Wu, S.; Zhang, B.; Zheng, F. Resolution-enhancing structure for the electric field microsensor chip. Micromachines 2021, 12, 936. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Xia, S.; Peng, C.; Wu, Z.; Chu, Z.; Zhang, Z.; Lei, H.; Zhang, W. Wafer-level vacuum-packaged electric field microsensor: Structure design, theoretical model, microfabrication, and characterization. Micromachines 2022, 13, 928. [Google Scholar] [CrossRef] [PubMed]
- Xie, B.; Xing, Y.; Wang, Y.; Chen, J.; Chen, D.; Wang, J. A lateral differential resonant pressure microsensor based on SOI-glass wafer-level vacuum packaging. Sensors 2015, 15, 24257–24268. [Google Scholar] [CrossRef] [PubMed]
- Hu, Q.; Li, N.; Xing, C.; Liu, Y.; Zhuang, H.; Xu, Y. Full-silicon MEMS sandwich capacitive accelerometer with wafer-level packaging. J. Chin. Inert. Technol. 2017, 25, 804–809. [Google Scholar]
- Yao, J.; Cheng, C.; Xue, H.; Li, X.; Lu, Y.; Xie, B.; Wang, J.; Chen, D.; Chen, J. A High-Sensitivity Resonant Differential Pressure Microsensor Based on Wafer-Level Eutectic Bonding. IEEE Trans. Electron. Devices 2023, 70, 2481–2488. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.; Peng, S.; Zhang, W.; Liu, Y.; Wang, Y.; Wu, Z.; Peng, C.; Xia, S. A Wafer-Level Vacuum-Packaged Vertical Resonant Electric Field Microsensor. IEEE Trans. Electron. Devices 2024, 71, 782–789. [Google Scholar] [CrossRef]
- Haque, R.M.; Wise, K.D. An intraocular pressure sensor based on a glass reflow process. In Proceedings of the Solid-State Sensors, Actuators, and Microsystems Workshop, Hilton Head Island, SC, USA, 6–10 June 2010. [Google Scholar]
- Razi-ul, M.H.; Wise, K.D. A glass-in-silicon reflow process for three-dimensional microsystems. J. Microelectromechanical Syst. 2013, 22, 1470–1477. [Google Scholar]
- Kuang, Y.; Xiao, D.; Zhou, J.; Zhuo, M.; Li, W.; Hou, Z.; Cui, H.; Wu, X. Enhancing airtightness of TGV through regulating interface energy for wafer-level vacuum packaging. Microsyst. Technol. 2018, 24, 3645–3649. [Google Scholar] [CrossRef]
- Fu, Y.; Han, G.; Gu, J.; Zhao, Y.; Ning, J.; Wei, Z.; Yang, F.; Si, C. A High-Performance MEMS Accelerometer with an Improved TGV Process of Low Cost. Micromachines 2022, 13, 1071. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Structural Parameters | Value |
|---|---|
| size of the silicon plate | 2500 μm × 1000 μm |
| size of the working electrodes | 630 μm × 5 μm |
| gap between two adjacent working electrodes | 5 μm |
| number of the working electrodes | 130 × 2 |
| size of the elastic beams | 650 μm × 50 μm |
| thickness of the device layer | 10 μm |
| height of the metal pillar | 2 mm |
| size of the inner driving electrode | 1600 μm × 1100 μm |
| size of the outer driving electrodes | 690 μm × 620 μm |
| width of the refilled glass at the drive cover | 40 μm |
| thickness of the glass layer of the drive cover | 100 μm |
| depth of the groove at the glass layer of the drive cover | 30 μm |
| diameter of the via | 670 μm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Peng, S.; Liu, X.; Liu, Y.; Zhang, W.; Peng, C.; Xia, S. A Sensitivity-Enhanced Vertical-Resonant MEMS Electric Field Sensor Based on TGV Technology. Micromachines 2024, 15, 356. https://doi.org/10.3390/mi15030356
Gao Y, Peng S, Liu X, Liu Y, Zhang W, Peng C, Xia S. A Sensitivity-Enhanced Vertical-Resonant MEMS Electric Field Sensor Based on TGV Technology. Micromachines. 2024; 15(3):356. https://doi.org/10.3390/mi15030356
Chicago/Turabian StyleGao, Yahao, Simin Peng, Xiangming Liu, Yufei Liu, Wei Zhang, Chunrong Peng, and Shanhong Xia. 2024. "A Sensitivity-Enhanced Vertical-Resonant MEMS Electric Field Sensor Based on TGV Technology" Micromachines 15, no. 3: 356. https://doi.org/10.3390/mi15030356
APA StyleGao, Y., Peng, S., Liu, X., Liu, Y., Zhang, W., Peng, C., & Xia, S. (2024). A Sensitivity-Enhanced Vertical-Resonant MEMS Electric Field Sensor Based on TGV Technology. Micromachines, 15(3), 356. https://doi.org/10.3390/mi15030356