
Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications

 , , ,
, , ,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Material and Preparation of MRE
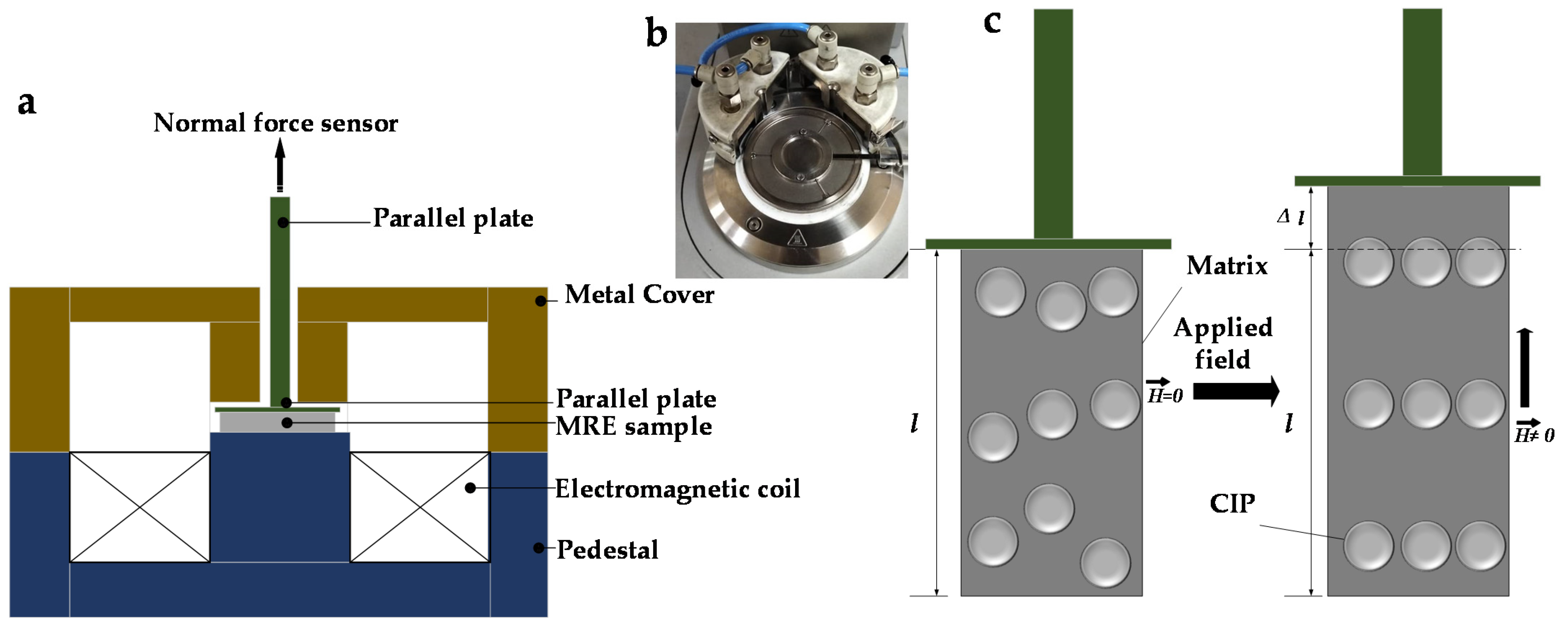
2.2. Microstructure Observation and Magnetostriction Measurements
3. Results and Discussion
3.1. Morphology Characteristic
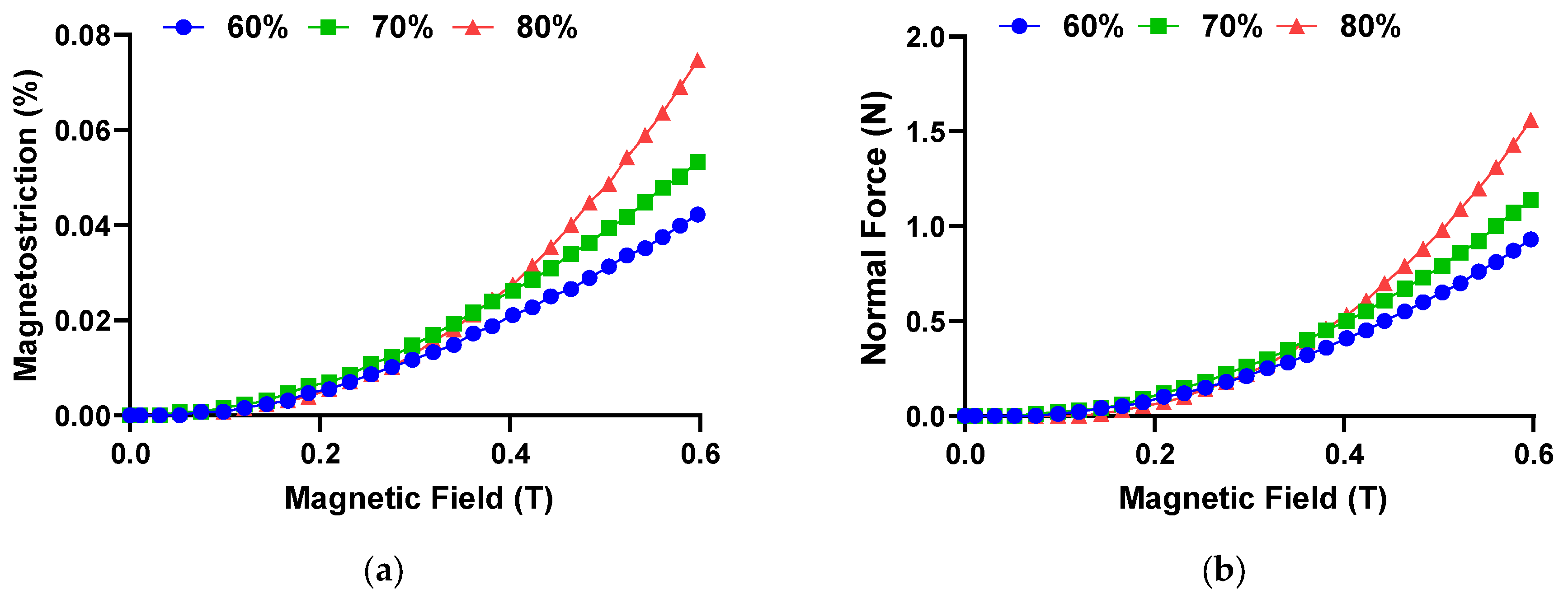
3.2. Effects of Particles’ Weight Percentage on Magnetostriction of MRE
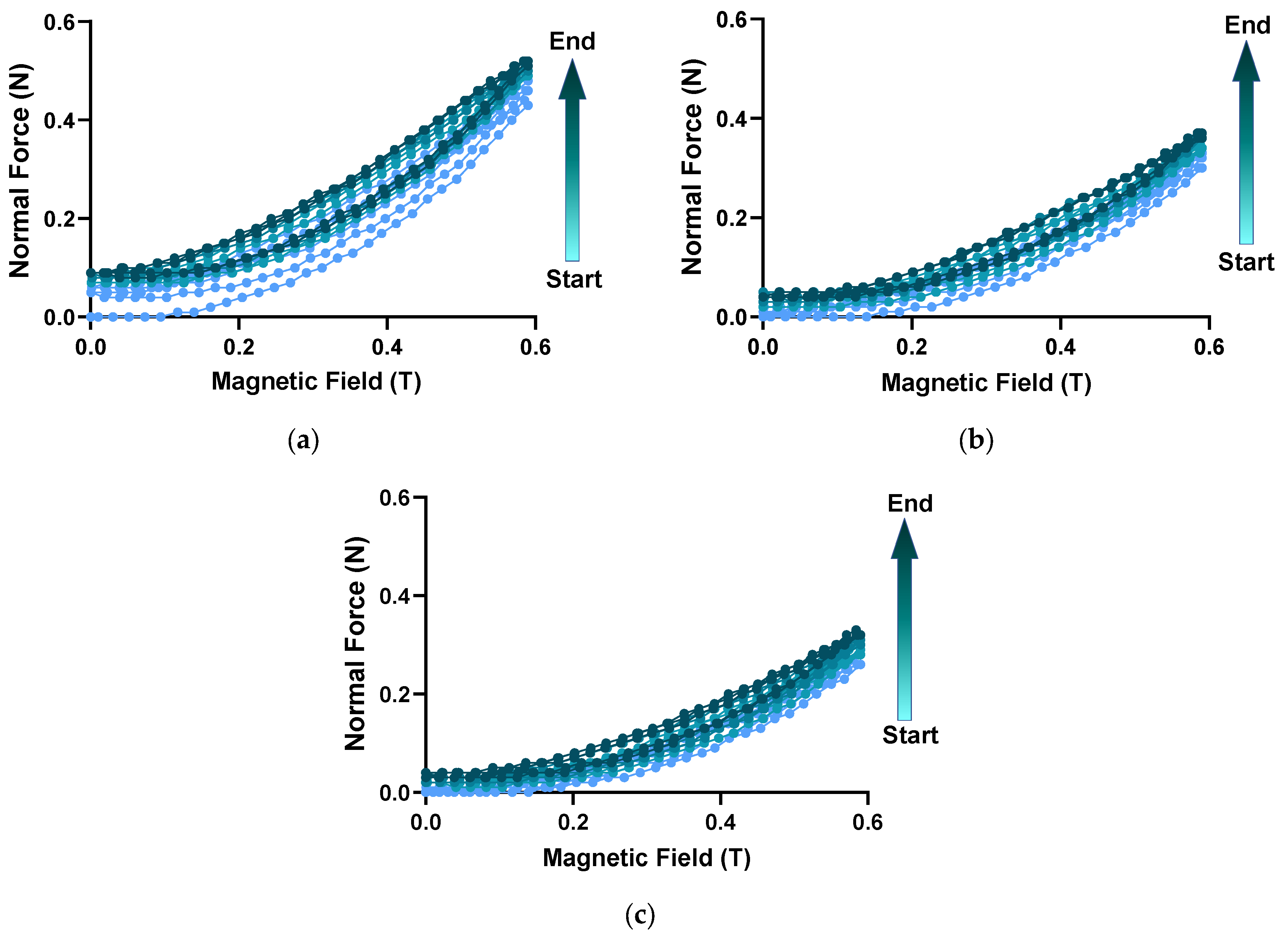
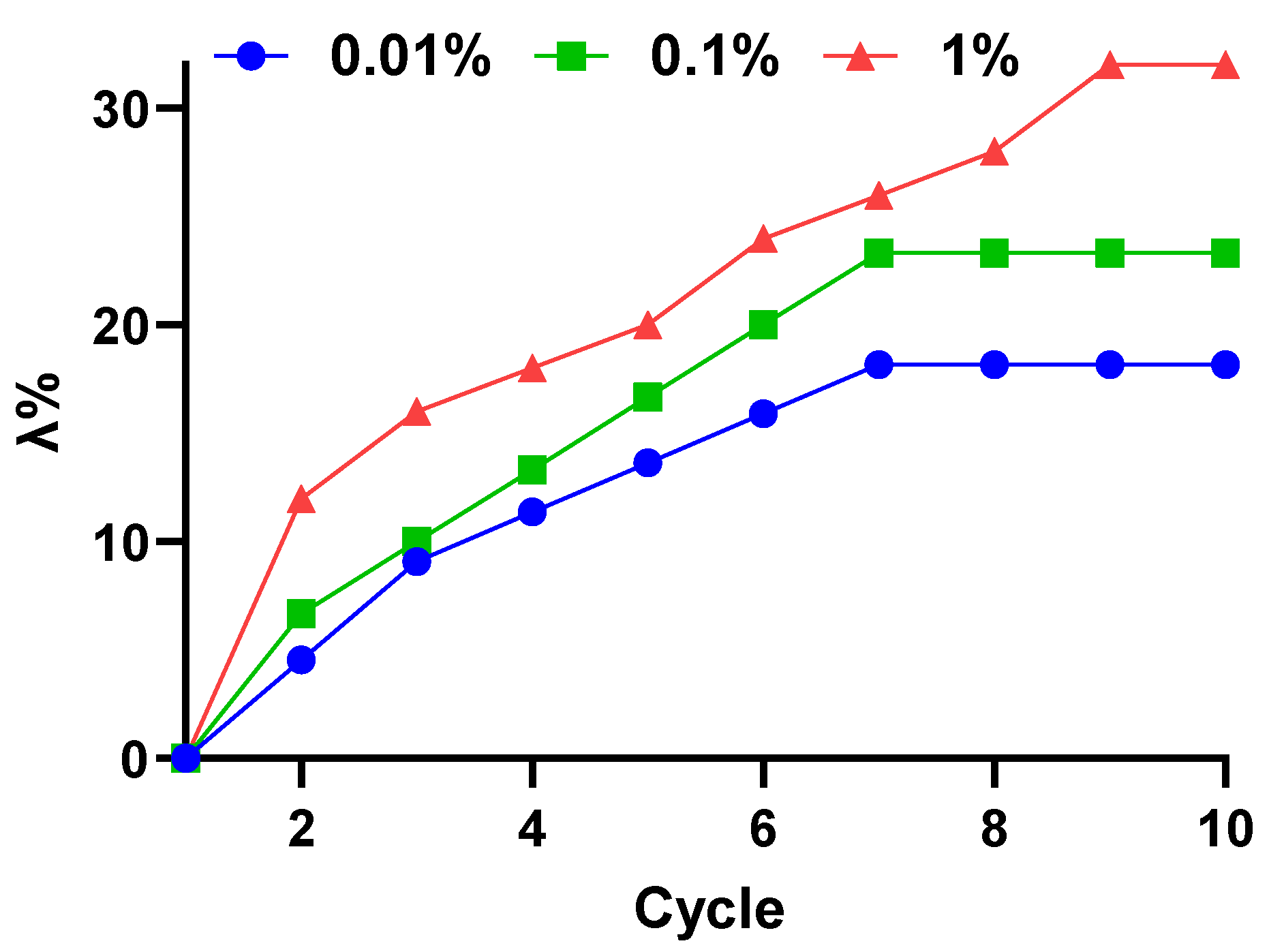
3.3. Normal Force under Cyclic Magnetic Loading at Different Strains
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guan, X.; Dong, X.; Ou, J. Magnetostrictive Effect of Magnetorheological Elastomer. J. Magn. Magn. Mater. 2008, 320, 158–163. [Google Scholar] [CrossRef]
- Saveliev, D.V.; Belyaeva, I.A.; Chashin, D.V.; Fetisov, L.Y.; Romeis, D.; Kettl, W.; Kramarenko, E.Y.; Saphiannikova, M.; Stepanov, G.V.; Shamonin, M. Giant Extensional Strain of Magnetoactive Elastomeric Cylinders in Uniform Magnetic Fields. Materials 2020, 13, 3297. [Google Scholar] [CrossRef] [PubMed]
- Dapino, M.J. On Magnetostrictive Materials and Their Use in Adaptive Structures. Struct. Eng. Mech. 2004, 17, 303–329. [Google Scholar] [CrossRef]
- Nersessian, N.; Or, S.W.; Carman, G.P.; Choe, W.; Radousky, H.B. Hollow and Solid Spherical Magnetostrictive Particulate Composites. J. Appl. Phys. 2004, 96, 3362–3365. [Google Scholar] [CrossRef]
- Liu, J.J.; Pan, Z.B.; Song, X.H.; Zhang, Z.R.; Ren, W.J. Enhanced Magnetostrictive Effect in Epoxy-Bonded Tb x Dy 0.9−x Nd 0.1 (Fe0.8Co0.2) 1.93 Pseudo 1–3 Particulate Composites. J. Appl. Phys. 2015, 117. [Google Scholar] [CrossRef]
- Kaleta, J.; Lewandowski, D.; Mech, R. Magnetostriction of Field-Structural Composite with Terfenol-D Particles. Arch. Civ. Mech. Eng. 2015, 15, 897–902. [Google Scholar] [CrossRef]
- Gonçalves, R.; Larrea, A.; Sebastian, M.S.; Sebastian, V.; Martins, P.; Lanceros-Mendez, S. Synthesis and Size Dependent Magnetostrictive Response of Ferrite Nanoparticles and Their Application in Magnetoelectric Polymer-Based Multiferroic Sensors. J. Mater. Chem. C 2016, 4, 10701–10706. [Google Scholar] [CrossRef]
- Altin, G.; Ho, K.K.; Henry, C.P.; Carman, G.P. Static Properties of Crystallographically Aligned Terfenol-D∕polymer Composites. J. Appl. Phys. 2007, 101, 033537. [Google Scholar] [CrossRef]
- Rhyne, J.J.; Legvold, S. Magnetostriction of Tb Single Crystals. Phys. Rev. 1965, 138, A507–A514. [Google Scholar] [CrossRef]
- Dobrzanski, L.; Tomiczek, A.; Nabiałek, A.; Zuberek, R. Structure and Magnetic Properties of Magnetostrictive Tb0.3Dy0.7Fe1.9/Polyurethane Composite Materials. J. Achiev. Mater. Manuf. Eng. 2010, 43, 527–532. [Google Scholar]
- Rodríguez, C.; Barrio, A.; Orue, I.; Vilas, J.L.; León, L.M.; Barandiarán, J.M.; Ruiz, M.F.-G. High Magnetostriction Polymer-Bonded Terfenol-D Composites. Sens. Actuators A Phys. 2008, 142, 538–541. [Google Scholar] [CrossRef]
- Yoo, B.; Na, S.M.; Pines, D.J. Influence of Particle Size and Filling Factor of Galfenol Flakes on Sensing Performance of Magnetostrictive Composite Transducers. IEEE Trans. Magn. 2015, 51, 2503204. [Google Scholar] [CrossRef]
- Hong, J.I.; Solomon, V.C.; Smith, D.J.; Parker, F.T.; Summers, E.M.; Berkowitz, A.E. One-Step Production of Optimized Fe–Ga Particles by Spark Erosion. Appl. Phys. Lett. 2006, 89, 142506. [Google Scholar] [CrossRef]
- Li, J.; Gao, X.; Zhu, J.; Jia, J.; Zhang, M. The Microstructure of Fe–Ga Powders and Magnetostriction of Bonded Composites. Scr. Mater. 2009, 61, 557–560. [Google Scholar] [CrossRef]
- Walters, K.; Busbridge, S.; Walters, S. Magnetic Properties of Epoxy-Bonded Iron–Gallium Particulate Composites. Smart Mater. Struct. 2013, 22, 025009. [Google Scholar] [CrossRef]
- Silva, J.A.; Gouveia, C.; Dinis, G.; Pinto, A.M.; Pereira, A.M. Giant Magnetostriction in Low-Concentration Magnetorheological Elastomers. Compos. Part B Eng. 2022, 243, 110125. [Google Scholar] [CrossRef]
- Carlson, J.D.; Jolly, M.R. MR Fluid, Foam and Elastomer Devices. Mechatronics 2000, 10, 555–569. [Google Scholar] [CrossRef]
- Lokander, M.; Stenberg, B. Performance of Isotropic Magnetorheological Rubber Materials. Polym. Test. 2003, 22, 245–251. [Google Scholar] [CrossRef]
- Zhu, J.T.; Xu, Z.D.; Guo, Y.Q. Experimental and Modeling Study on Magnetorheological Elastomers with Different Matrices. J. Mater. Civ. Eng. 2013, 25, 1762–1771. [Google Scholar] [CrossRef]
- Oldfield, D.; Symes, T. Long Term Natural Ageing of Silicone Elastomers. Polym. Test. 1996, 15, 115–128. [Google Scholar] [CrossRef]
- Yu, Z.R.; Li, S.N.; Zang, J.; Zhang, M.; Gong, L.X.; Song, P.; Zhao, L.; Zhang, G.D.; Tang, L.C. Enhanced Mechanical Property and Flame Resistance of Graphene Oxide Nanocomposite Paper Modified with Functionalized Silica Nanoparticles. Compos. Part B Eng. 2019, 177, 107347. [Google Scholar] [CrossRef]
- Song, P.; Song, J.; Zhang, Y. Stretchable Conductor Based on Carbon Nanotube/Carbon Black Silicone Rubber Nanocomposites with Highly Mechanical, Electrical Properties and Strain Sensitivity. Compos. Part B Eng. 2020, 191, 107979. [Google Scholar] [CrossRef]
- Kostrov, S.A.; Gorodov, V.V.; Sokolov, B.O.; Muzafarov, A.M.; Kramarenko, E.Y. Low-Modulus Elastomeric Matrices for Magnetoactive Composites with a High Magnetic Field Response. Polym. Sci.-Ser. A 2020, 62, 383–391. [Google Scholar] [CrossRef]
- Wei, B.; Gong, X.; Jiang, W. Influence of Polyurethane Properties on Mechanical Performances of Magnetorheological Elastomers. J. Appl. Polym. Sci. 2010, 116, 771–778. [Google Scholar] [CrossRef]
- Ioppolo, T.; Otügen, M.V. Magnetorheological Polydimethylsiloxane Micro-Optical Resonator. Opt. Lett. 2010, 35, 2037–2039. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, S.; Wen, W.; Li, W. Analysis and Fabrication of Patterned Magnetorheological Elastomers. Smart Mater. Struct. 2008, 17, 045001. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, H.; Wang, Q.; Jiang, S.; Yi, L.; Wang, J. Study on Movement Mechanism of Magnetic Particles in Silicone Rubber-Based Magnetorheological Elastomers with Viscosity Change. J. Magn. Magn. Mater. 2020, 494, 165793. [Google Scholar] [CrossRef]
- Bednarek, S. The Giant Volumetric Magnetostriction of Ferromagnetic Composites with Elastomer Matrix. Mod. Phys. Lett. B 1999, 13, 865–878. [Google Scholar] [CrossRef]
- Bednarek, S. The Giant Linear Magnetostriction in Elastic Ferromagnetic Composites within a Porous Matrix. J. Magn. Magn. Mater. 2006, 301, 200–207. [Google Scholar] [CrossRef]
- Abramchuk, S.; Kramarenko, E.; Grishin, D.; Stepanov, G.; Nikitin, L.V.; Filipcsei, G.; Khokhlov, A.R.; Zrínyi, M. Novel Highly Elastic Magnetic Materials for Dampers and Seals: Part, I.I. Material Behavior in a Magnetic Field. Polym. Adv. Technol. 2007, 18, 513–518. [Google Scholar] [CrossRef]
- Diguet, G.; Beaugnon, E.; Cavaillé, J.Y. Shape Effect in the Magnetostriction of Ferromagnetic Composite. J. Magn. Magn. Mater. 2010, 322, 3337–3341. [Google Scholar] [CrossRef]
- Lötters, J.C.; Olthuis, W.; Veltink, P.H.; Bergveld, P. The Mechanical Properties of the Rubber Elastic Polymer Polydimethylsiloxane for Sensor Applications. J. Micromechanics Microeng. 1997, 7, 145–147. [Google Scholar] [CrossRef]
- Ahn, J.; Gu, J.; Choi, J.; Han, C.; Jeong, Y.; Park, J.; Cho, S.; Oh, Y.S.; Jeong, J.H.; Amjadi, M.; et al. A Review of Recent Advances in Electrically Driven Polymer-Based Flexible Actuators: Smart Materials, Structures, and Their Applications. Adv. Mater. Technol. 2022, 7, 2200041. [Google Scholar] [CrossRef]
- Tsujio, S.; Chaen, T.; Yu, Y. High-Stiffness and High-Sensitivity 3-Axis Force Sensor Using Strain-Deformation Expansion Mechanism. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 4417–4422. [Google Scholar]
- Jeong, Y.; Gu, J.; Byun, J.; Ahn, J.; Byun, J.; Kim, K.; Park, J.; Ko, J.; Jeong, J.; Amjadi, M.; et al. Ultra-Wide Range Pressure Sensor Based on a Microstructured Conductive Nanocomposite for Wearable Workout Monitoring. Adv. Healthc. Mater. 2021, 10, 2001461. [Google Scholar] [CrossRef]
- Dong, X.; Ma, N.; Qi, M.; Li, J.; Chen, R.; Ou, J. The Pressure-Dependent MR Effect of Magnetorheological Elastomers. Smart Mater. Struct. 2012, 21, 075014. [Google Scholar] [CrossRef]
- Tian, T.; Nakano, M. Fabrication and Characterisation of Anisotropic Magnetorheological Elastomer with 45° Iron Particle Alignment at Various Silicone Oil Concentrations. J. Intell. Mater. Syst. Struct. 2018, 29, 151–159. [Google Scholar] [CrossRef]
- Cantera, M.A.; Behrooz, M.; Gibson, R.F.; Gordaninejad, F. Modeling of Magneto-Mechanical Response of Magnetorheological Elastomers (MRE) and MRE-Based Systems: A Review. Smart Mater. Struct. 2017, 26, 023001. [Google Scholar] [CrossRef]
- Lee, C.J.; Kwon, S.H.; Choi, H.J.; Chung, K.H.; Jung, J.H. Enhanced Magnetorheological Performance of Carbonyl Iron/Natural Rubber Composite Elastomer with Gamma-Ferrite Additive. Colloid Polym. Sci. 2018, 296, 1609–1613. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Stepanov, G.V.; Shamonin, M.; Monkman, G.J.; Khokhlov, A.R.; Kramarenko, E.Y. Hysteresis of the Viscoelastic Properties and the Normal Force in Magnetically and Mechanically Soft Magnetoactive Elastomers: Effects of Filler Composition, Strain Amplitude and Magnetic Field. Polymer 2015, 76, 191–202. [Google Scholar] [CrossRef]
- Zhang, Y.; Fang, F.; Huang, W.; Chen, Y.; Qi, S.; Yu, M. Dynamic Mechanical Hysteresis of Magnetorheological Elastomers Subjected to the Cyclic Loading and Periodic Magnetic Field. Front. Mater. 2019, 6, 292. [Google Scholar] [CrossRef]
- Zhang, S.; Ge, C.; Liu, R. Mechanical Characterization of the Stress-Strain Behavior of the Polydimethylsiloxane (PDMS) Substate of Wearable Strain Sensors under Uniaxial Loading Conditions. Sens. Actuators A Phys. 2022, 341, 113580. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed]
- Santaniello, T.; Migliorini, L.; Locatelli, E.; Monaco, I.; Yan, Y.; Lenardi, C.; Franchini, M.C.; Milani, P. Hybrid Nanocomposites Based on Electroactive Hydrogels and Cellulose Nanocrystals for High-Sensitivity Electro–Mechanical Underwater Actuation. Smart Mater. Struct. 2017, 26, 085030. [Google Scholar] [CrossRef]
- Piazzoni, M.; Piccoli, E.; Migliorini, L.; Milana, E.; Iberite, F.; Vannozzi, L.; Ricotti, L.; Gerges, I.; Milani, P.; Marano, C.; et al. Monolithic Three-Dimensional Functionally Graded Hydrogels for Bioinspired Soft Robots Fabrication. Soft Robot. 2022, 9, 224–232. [Google Scholar] [CrossRef]
- Jing, X.; Chen, S.; Zhang, C.; Xie, F. Increasing Bending Performance of Soft Actuator by Silicon Rubbers of Multiple Hardness. Machines 2022, 10, 272. [Google Scholar] [CrossRef]
- Yoon, J.H.; Lee, S.W.; Bae, S.H.; Kim, N.I.; Yun, J.H.; Jung, J.H.; Kim, Y.-G. Effect of Cyclic Shear Fatigue under Magnetic Field on Natural Rubber Composite as Anisotropic Magnetorheological Elastomers. Polymers 2022, 14, 1927. [Google Scholar] [CrossRef]
- Molchanov, V.S.; Stepanov, G.V.; Vasiliev, V.G.; Kramarenko, E.Y.; Khokhlov, A.R.; Xu, Z.D.; Guo, Y.Q. Viscoelastic Properties of Magnetorheological Elastomers for Damping Applications. Macromol. Mater. Eng. 2014, 299, 1116–1125. [Google Scholar] [CrossRef]
- Guo, F.; Du, C.; Yu, G. The Normal Force Characteristic of a Novel Magnetorheological Elastomer Based on Butadiene Rubber Matrix Compounded with the Self-Fabricated Silly Putty. Adv. Mater. Sci. Eng. 2021, 2021, 5831721. [Google Scholar] [CrossRef]
- Liao, G.; Gong, X.; Xuan, S. Influence of Shear Deformation on the Normal Force of Magnetorheological Elastomer. Mater. Lett. 2013, 106, 270–272. [Google Scholar] [CrossRef]
- Linke, J.M.; Borin, D.Y.; Odenbach, S. First-Order Reversal Curve Analysis of Magnetoactive Elastomers. RSC Adv. 2016, 6, 100407–100416. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Shamonin, M. Magnetodielectric Effect in Magnetoactive Elastomers: Transient Response and Hysteresis. Polymer 2017, 127, 119–128. [Google Scholar] [CrossRef]
- Johari, M.A.F.; Mazlan, S.A.; Nasef, M.M.; Ubaidillah, U.; Nordin, N.A.; Aziz, S.A.A.; Johari, N.; Nazmi, N. Microstructural Behavior of Magnetorheological Elastomer Undergoing Durability Evaluation by Stress Relaxation. Sci. Rep. 2021, 11, 10936. [Google Scholar] [CrossRef]
- Johari, M.A.F.; Mazlan, S.A.; Nordin, N.A.; Ubaidillah, U.; Aziz, S.A.A.; Nazmi, N.; Johari, N.; Choi, S.-B. The Effect of Microparticles on the Storage Modulus and Durability Behavior of Magnetorheological Elastomer. Micromachines 2021, 12, 948. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Particle’s Weight (%) | Sylgard 84 (10:1 wt%) | Storage Modulus (kPa) |
|---|---|---|---|
| MRE 60 wt.% | 60 | 40 | 350 |
| MRE 70 wt.% | 70 | 30 | 680 |
| MRE 80 wt.% | 80 | 20 | 743 |
| Current (A) | Magnetic Field (T) |
|---|---|
| 0 | 0 |
| 1 | 0.21 |
| 2 | 0.39 |
| 3 | 0.61 |
| Samples | Magnetic Field (T) |
|---|---|
| MRE 60 wt.% | 0.72 |
| MRE 70 wt.% | 0.74 |
| MRE 80 wt.% | 0.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tasin, M.A.; Aziz, S.A.A.; Mazlan, S.A.; Johari, M.A.F.; Nordin, N.A.; Yusuf, S.Y.M.; Choi, S.-B.; Bahiuddin, I. Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications. Micromachines 2023, 14, 767. https://doi.org/10.3390/mi14040767
Tasin MA, Aziz SAA, Mazlan SA, Johari MAF, Nordin NA, Yusuf SYM, Choi S-B, Bahiuddin I. Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications. Micromachines. 2023; 14(4):767. https://doi.org/10.3390/mi14040767
Chicago/Turabian StyleTasin, Muhammad Asyraf, Siti Aishah Abdul Aziz, Saiful Amri Mazlan, Mohd Aidy Faizal Johari, Nur Azmah Nordin, Shahir Yasin Mohd Yusuf, Seung-Bok Choi, and Irfan Bahiuddin. 2023. "Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications" Micromachines 14, no. 4: 767. https://doi.org/10.3390/mi14040767
APA StyleTasin, M. A., Aziz, S. A. A., Mazlan, S. A., Johari, M. A. F., Nordin, N. A., Yusuf, S. Y. M., Choi, S.-B., & Bahiuddin, I. (2023). Magnetostriction Enhancement in Midrange Modulus Magnetorheological Elastomers for Sensor Applications. Micromachines, 14(4), 767. https://doi.org/10.3390/mi14040767