
Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
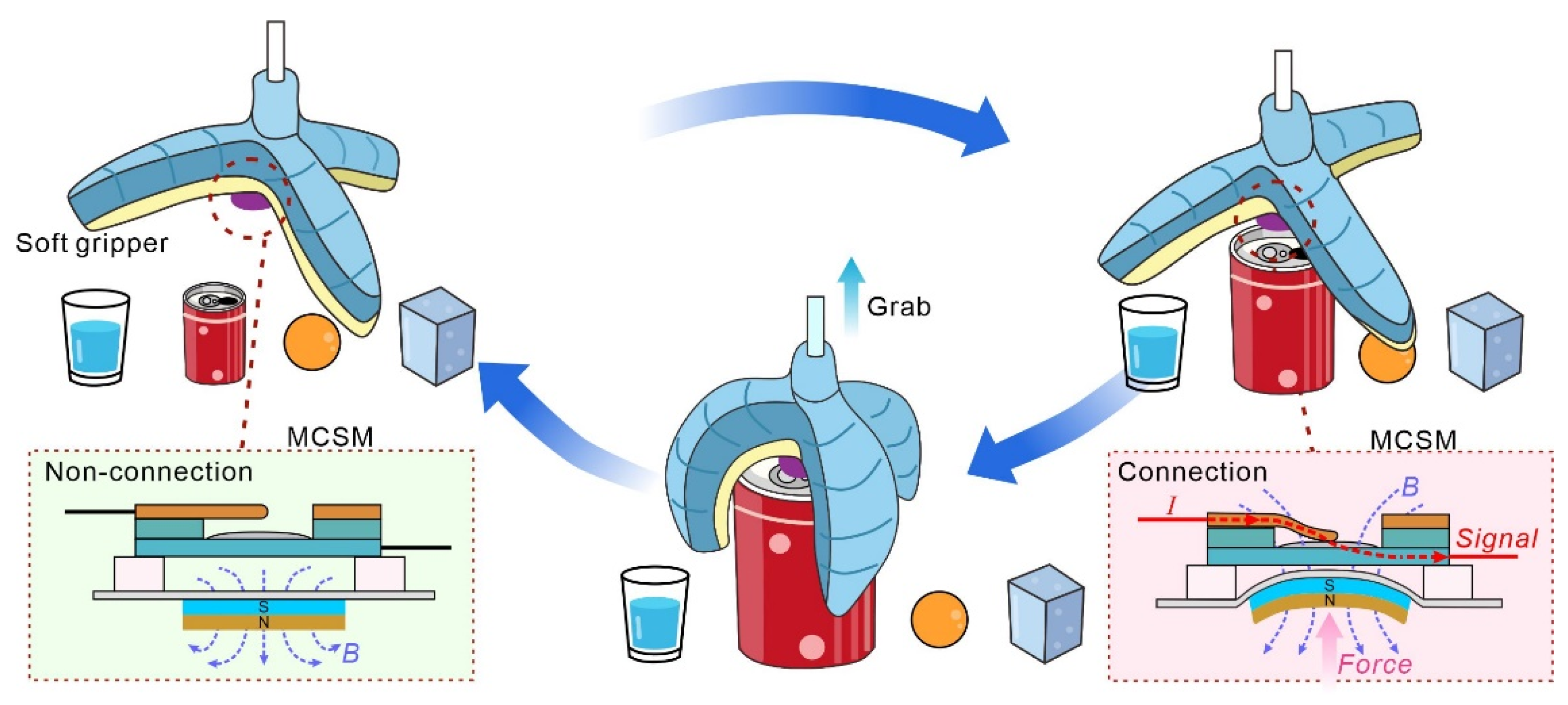
2.1. Working Principle
2.2. Fabrication Process of the MCSMs
2.2.1. Materials Preparation
2.2.2. Fabrication Process of the MCSM
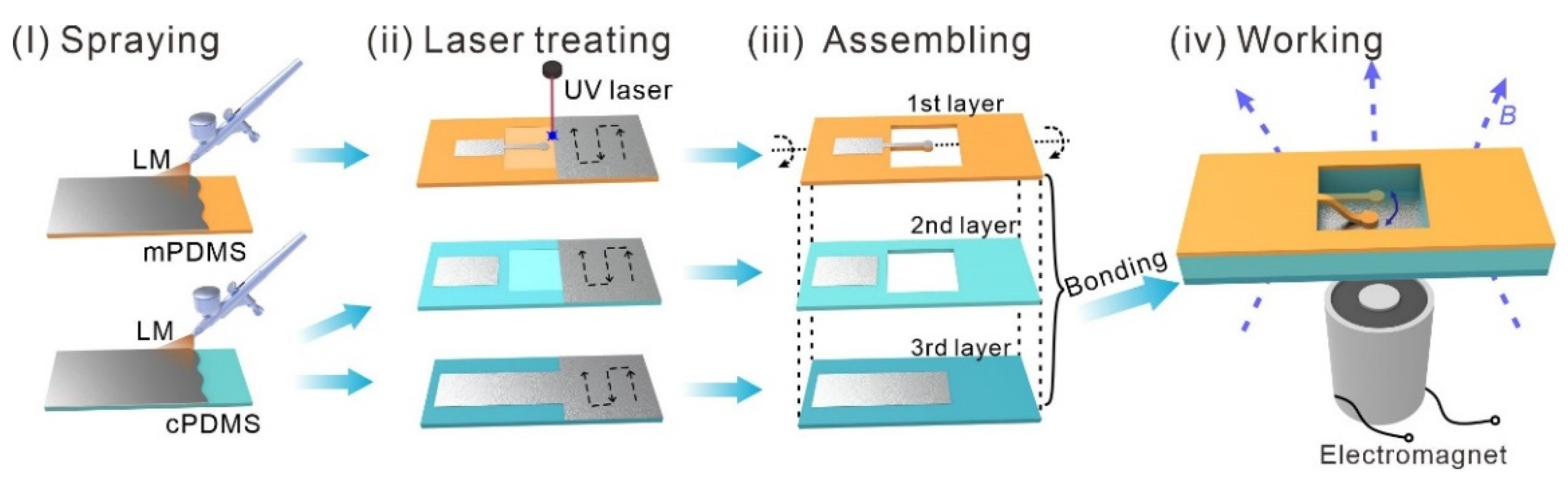
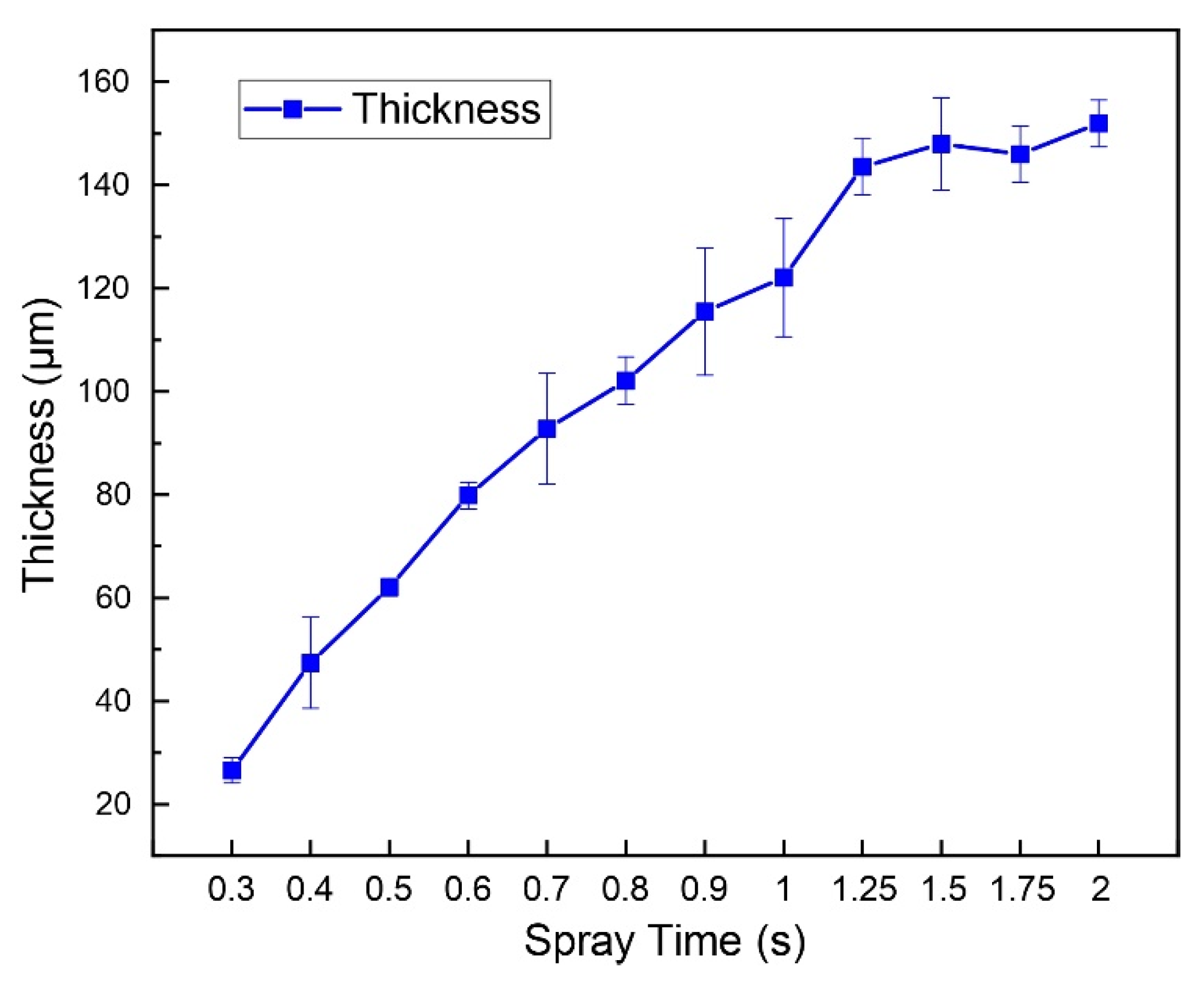
- Spraying of the LM. The LM (Galinstan, 68.5% Ga, 21.5% In, 10% Sn; Geratherm Medical AG, Geschwenda, Germany) film was atomized sprayed on the surface of mPDMS and cPDMS substrates, using a spray gun (Meec tools; Jula, Sweden). The spray time (from 0.3 to 2 s) and air pressure (0.35 Mpa) can be regulated by a pressure regulator (ML-5000XII; Musashi Engineering, Tokyo, Japan). The distance between the nozzle and substrate is about 5 mm.
- Laser treating. A UV laser marker (HGL-LSU3/5EI, Huagong Laser, Wuhan, China, wavelength: 355 nm, pulse repetition frequency: 50 kHz) was utilized to treat three different layers. Each layer was treated in two steps. The first step aimed to remove the superfluous LM film and retain the LM patterns. Then, the second ablation step with higher energy aimed to cut substrates, forming a beam and hollow. For the first step, a laser with a scanning speed of 400 mm s−1, an adjacent distance of 0.05 mm, and a pulse width of 0.1 μs was used for the LM removal. For the second step, a laser with a moving speed of 40 mm s−1 and a pulse width of 0.2 μs was used for substrate cutting.
- Assembling. Three soft layers were aligned layer by layer and bounded by the uncured PDMS. Then, the MCSM was placed in the oven at 90 °C for 25 min. to bound well.
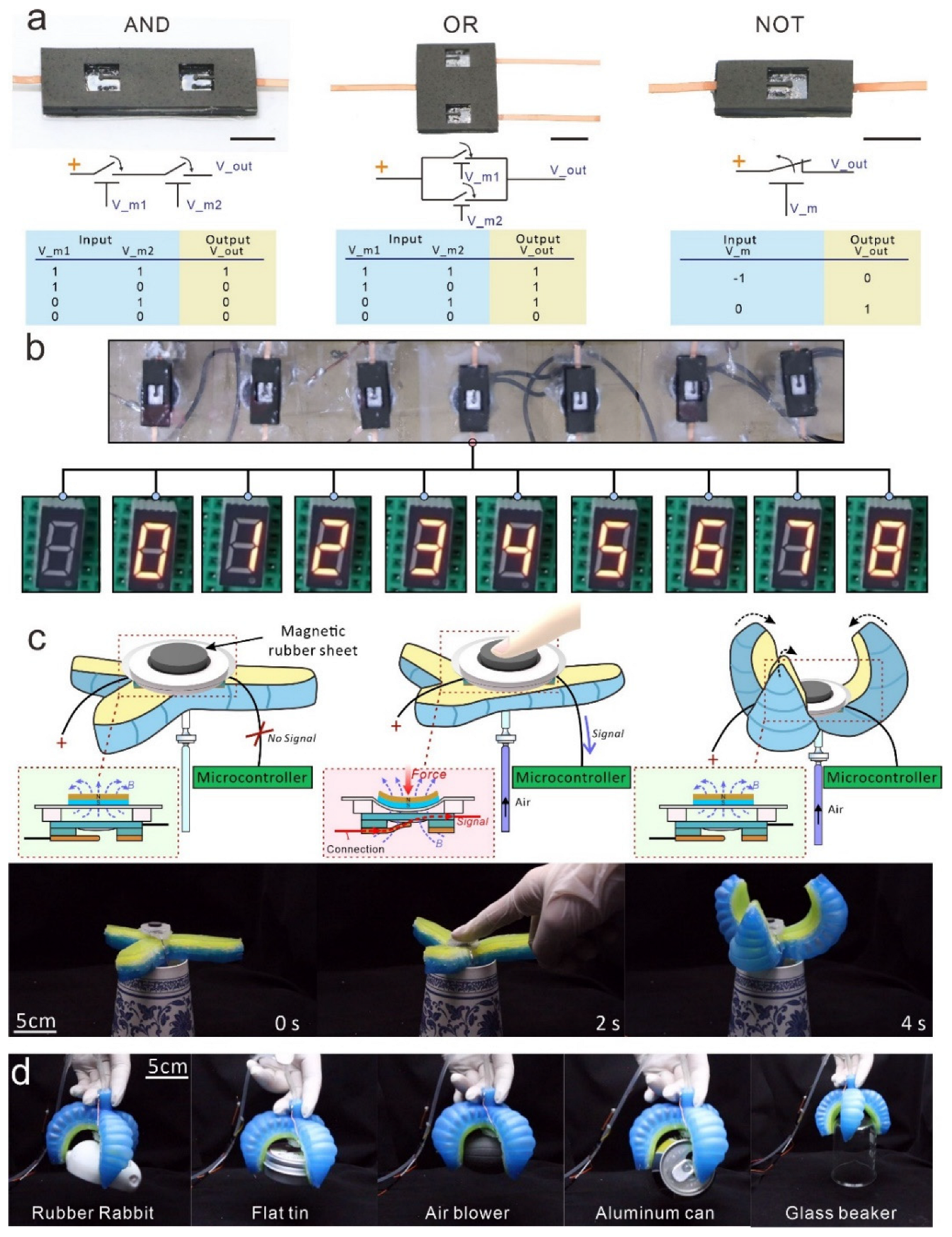
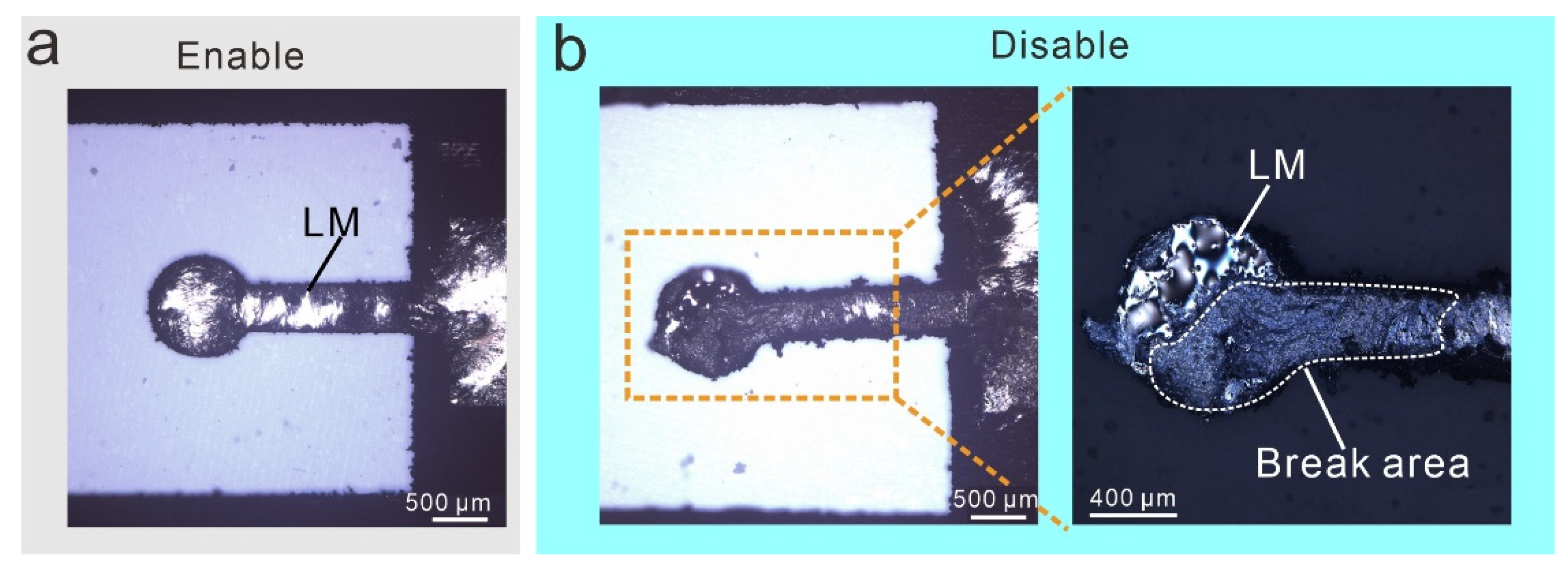
- Working. A micro-switch was placed on the electromagnet. Under the attraction of the magnetic field, the MCSM is turned on.
2.2.3. Methods of Verification and Demonstrations
3. Results
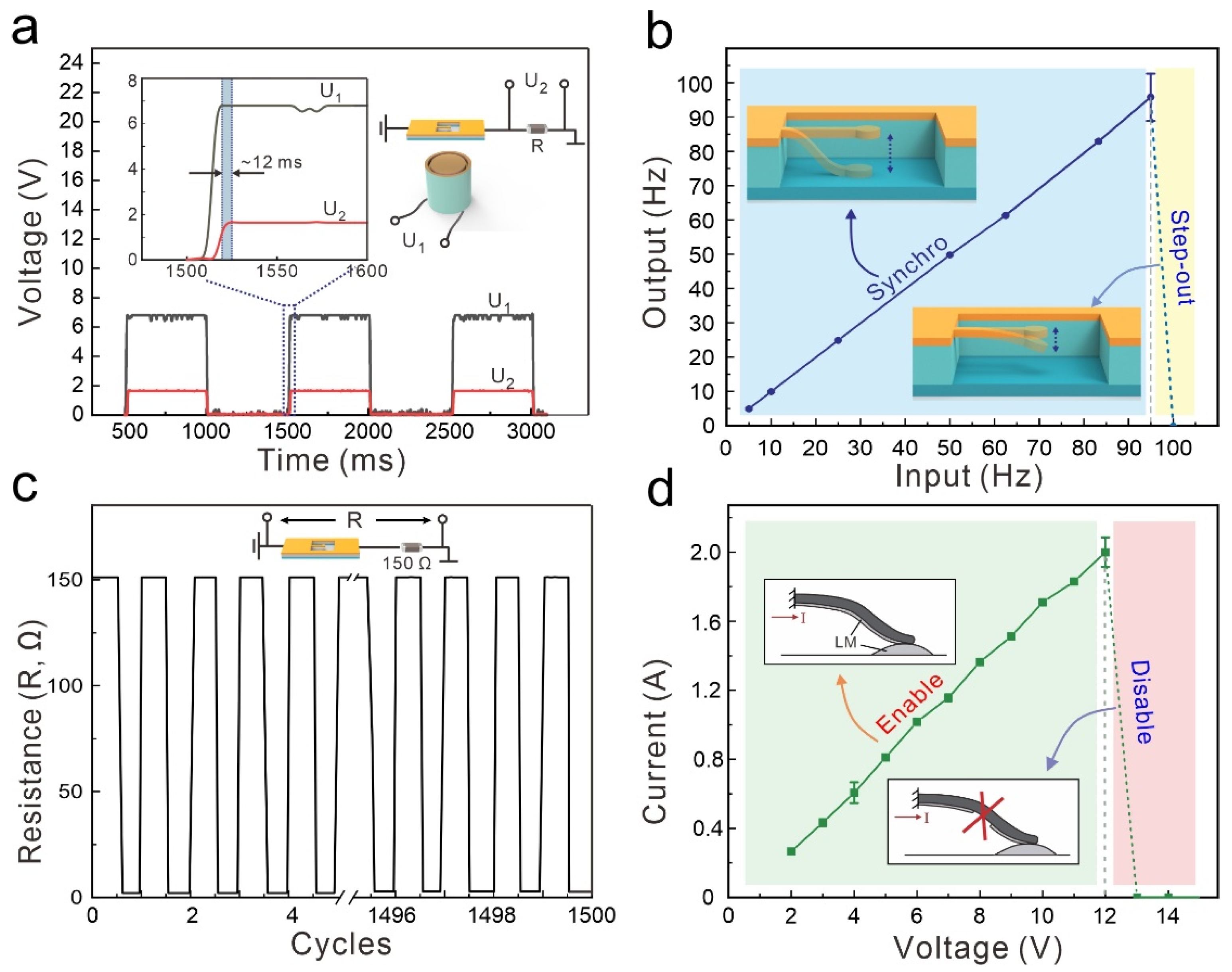
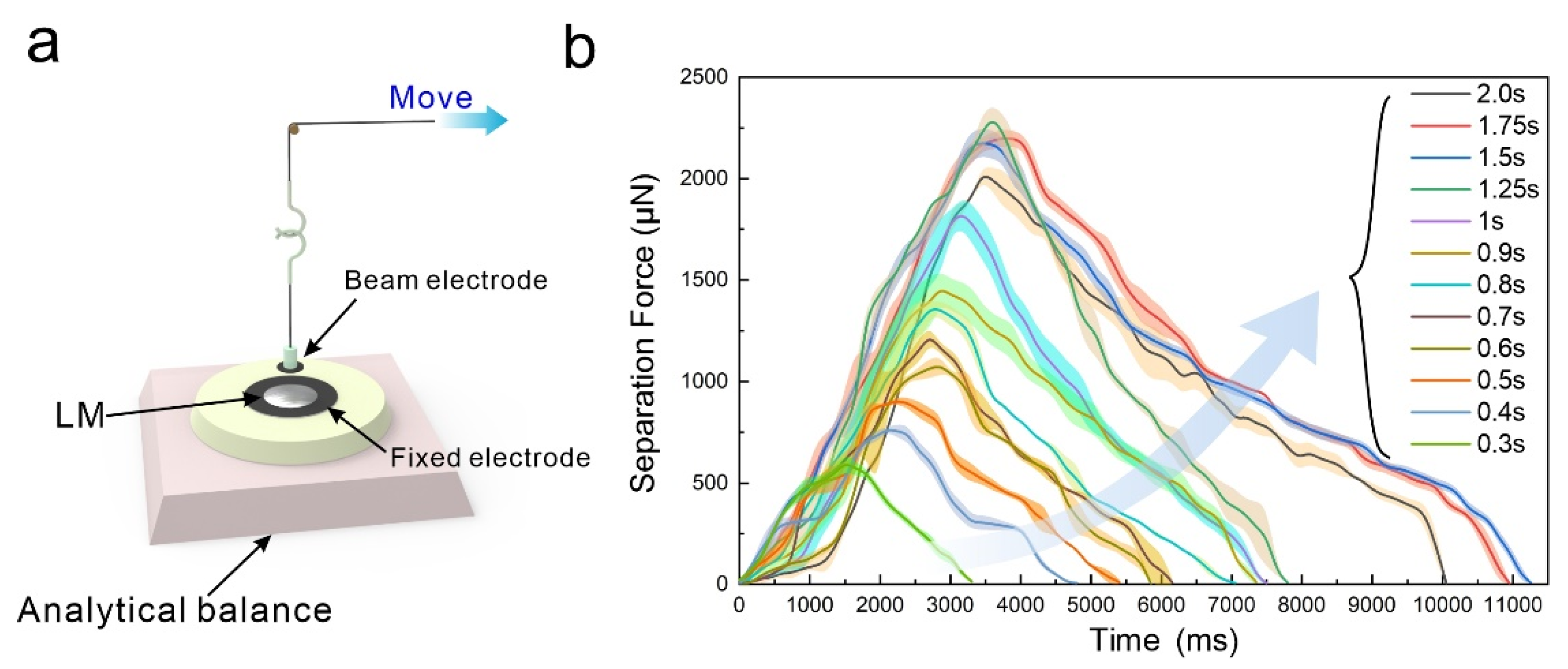
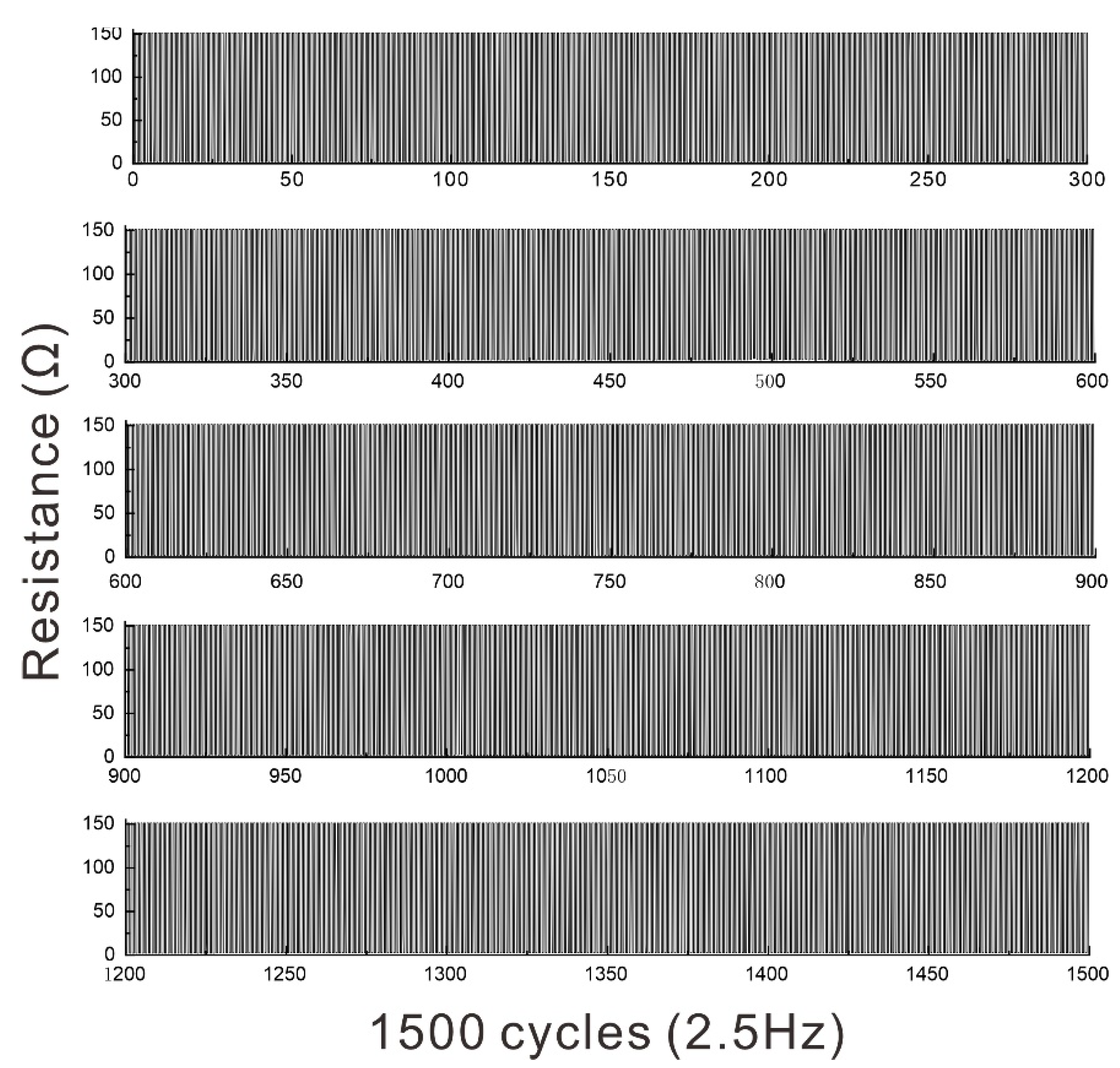
3.1. Electrical Characterization
3.2. Demonstrations
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A






References
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft Robotics: Technologies and Systems Pushing the Boundaries of Robot Abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Byun, J.; Kim, J.K.; Choi, W.Y.; Jakobsen, K.; Jakobsen, J.; Lee, D.Y.; Cho, K.J. Bioinspired Dual-Morphing Stretchable Origami. Sci. Robot. 2019, 4, eaay3493. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Vella, K.; Holmes, D.P. Grasping with Kirigami Shells. Sci. Robot. 2021, 6, eadb6426. [Google Scholar] [CrossRef] [PubMed]
- Ze, Q.; Kuang, X.; Wu, S.; Wong, J.; Montgomery, S.M.; Zhang, R.; Kovitz, J.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Adv. Mater. 2020, 32, 1906657. [Google Scholar] [CrossRef]
- Zhao, R.; Dai, H.; Yao, H. Liquid-Metal Magnetic Soft Robot with Reprogrammable Magnetization and Stiffness. IEEE Robot. Autom. Lett. 2022, 7, 4535–4541. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, D.; Harker, P.; Patel, A.B.; Guo, C.F.; Zhao, X. Evolutionary Design of Magnetic Soft Continuum Robots. Proc. Natl. Acad. Sci. USA. 2021, 118, e2021922118. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, Y.; Wang, J.; Wu, Q.; Gu, Z.; Zhou, Y.; Liu, X.; Yang, Y.; Tang, H.; Ling, Q.; et al. Ferromagnetic Soft Catheter Robots for Minimally Invasive Bioprinting. Nat. Commun. 2021, 12, 5072. [Google Scholar] [CrossRef]
- Heng, W.; Solomon, S.; Gao, W. Flexible Electronics and Devices as Human–Machine Interfaces for Medical Robotics. Adv. Mater. 2022, 34, 2107902. [Google Scholar] [CrossRef]
- Bai, H.; Li, S.; Barreiros, J.; Tu, Y.; Pollock, C.R.; Shepherd, R.F. Stretchable Distributed Fiber-Optic Sensors. Science 2020, 370, 848–852. [Google Scholar] [CrossRef]
- Shih, B.; Shah, D.; Li, J.; Thuruthel, T.G.; Park, Y.L.; Iida, F.; Bao, Z.; Kramer-Bottiglio, R.; Tolley, M.T. Electronic Skins and Machine Learning for Intelligent Soft Robots. Sci. Robot. 2020, 5, eaaz9239. [Google Scholar] [CrossRef]
- Li, G.; Liu, S.; Wang, L.; Zhu, R. Skin-Inspired Quadruple Tactile Sensors Integrated on a Robot Hand Enable Object Recognition. Sci. Robot. 2020, 5, eabc8134. [Google Scholar] [CrossRef] [PubMed]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A Hierarchically Patterned, Bioinspired e-Skin Able to Detect the Direction of Applied Pressure for Robotics. Sci. Robot. 2018, 3, eaau6914. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically Innervated Soft Prosthetic Hand via Stretchable Optical Waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft Magnetic Skin for Super-Resolution Tactile Sensing with Force Self-Decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Wang, H.Z.; Zhao, R.Q.; Rao, W.; Liu, J. Liquid Metal Composites. Matter 2020, 2, 1446–1480. [Google Scholar] [CrossRef]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Kim, M.G.; Alrowais, H.; Brand, O. 3D-Integrated and Multifunctional All-Soft Physical Microsystems Based on Liquid Metal for Electronic Skin Applications. Adv. Electron. Mater. 2018, 4, 1700434. [Google Scholar] [CrossRef]
- Oh, J.; Kim, S.; Lee, S.; Jeong, S.; Ko, S.H.; Bae, J. A Liquid Metal Based Multimodal Sensor and Haptic Feedback Device for Thermal and Tactile Sensation Generation in Virtual Reality. Adv. Funct. Mater. 2021, 31, 2007772. [Google Scholar] [CrossRef]
- Yin, J.; Hinchet, R.; Shea, H.; Majidi, C. Wearable Soft Technologies for Haptic Sensing and Feedback. Adv. Funct. Mater. 2021, 31, 2007428. [Google Scholar] [CrossRef]
- Xu, J.; Pang, H.; Gong, X.; Pei, L.; Xuan, S. A Shape-Deformable Liquid-Metal-Filled Magnetorheological Plastomer Sensor with a Magnetic Field “on-off” Switch. iScience 2021, 24, 102549. [Google Scholar] [CrossRef]
- Jiang, J.; Fei, W.; Pu, M.; Chai, Z.; Wu, Z. A Facile Liquid Alloy Wetting Enhancing Strategy on Super-Hydrophobic Lotus Leaves for Plant-Hybrid System Implementation. Adv. Mater. Interfaces 2022, 9, 2200516. [Google Scholar] [CrossRef]
- Kim, K.; Choi, J.; Jeong, Y.; Cho, I.; Kim, M.; Kim, S.; Oh, Y.; Park, I. Highly Sensitive and Wearable Liquid Metal-Based Pressure Sensor for Health Monitoring Applications: Integration of a 3D-Printed Microbump Array with the Microchannel. Adv. Healthc. Mater. 2019, 8, 1900978. [Google Scholar] [CrossRef] [PubMed]
- Wissman, J.; Dickey, M.D.; Majidi, C. Field-Controlled Electrical Switch with Liquid Metal. Adv. Sci. 2017, 4, 1700169. [Google Scholar] [CrossRef] [PubMed]
- Sheng, L.; Zhang, J.; Liu, J. Diverse Transformations of Liquid Metals between Different Morphologies. Adv. Mater. 2014, 26, 6036–6042. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.R.; Eaker, C.B.; Bowden, E.F.; Dickey, M.D. Giant and Switchable Surface Activity of Liquid Metal via Surface Oxidation. Proc. Natl. Acad. Sci. USA. 2014, 111, 14047–14051. [Google Scholar] [CrossRef] [PubMed]
- Jeon, J.; Lee, J.B.; Chung, S.K.; Kim, D. On-Demand Magnetic Manipulation of Liquid Metal in Microfluidic Channels for Electrical Switching Applications. Lab Chip 2017, 17, 128–133. [Google Scholar] [CrossRef]
- Eustathopoulos, N. Wetting by Liquid Metals—Application in Materials Processing: The Contribution of the Grenoble Group. Metals 2015, 5, 350–370. [Google Scholar] [CrossRef]
- Kumar, P.; Howarth, J.; Dutta, I. Electric Current Induced Flow of Liquid Metals: Mechanism and Substrate-Surface Effects. J. Appl. Phys. 2014, 115, 044915. [Google Scholar] [CrossRef]
- Michaud, H.O.; Lacour, S.P. Liquid Electromigration in Gallium-Based Biphasic Thin Films. APL Mater. 2019, 7, 031504. [Google Scholar] [CrossRef]
- Epstein, S.G.; Dickey, J.M. Electromigration in Liquid Na-K Alloys. Phys. Rev. B 1970, 1, 2442–2446. [Google Scholar] [CrossRef]
- Liu, J.; Sheng, L.; He, Z.-Z. Liquid Metal Soft Machines Principles and Applications; Bergmann, C.P., Ed.; Springer: Singapore, 2019; ISBN 9789811327087. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Q.; Hu, Z.; Xie, Y.; Wu, K.; Zhang, S.; Wu, Z. Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems. Micromachines 2022, 13, 2255. https://doi.org/10.3390/mi13122255
Jiang Q, Hu Z, Xie Y, Wu K, Zhang S, Wu Z. Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems. Micromachines. 2022; 13(12):2255. https://doi.org/10.3390/mi13122255
Chicago/Turabian StyleJiang, Qin, Zhitong Hu, Yaping Xie, Kefan Wu, Shuo Zhang, and Zhigang Wu. 2022. "Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems" Micromachines 13, no. 12: 2255. https://doi.org/10.3390/mi13122255
APA StyleJiang, Q., Hu, Z., Xie, Y., Wu, K., Zhang, S., & Wu, Z. (2022). Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems. Micromachines, 13(12), 2255. https://doi.org/10.3390/mi13122255