
Coupled Finite Element-Finite Volume Multi-Physics Analysis of MEMS Electrothermal Actuators

 , , and
, , and 
Abstract
:1. Introduction
2. Electrothermal MEMS Actuating Principles and Fabrication Process Overview
3. Silicon-on-Insulator Mechanical and Thermal Properties
4. Analytical Modelling
5. Numerical Modeling Methodology
5.1. Sequential Coupling Methodology via the Finite Element Method
Sequential Coupling—Model Setup
- i.
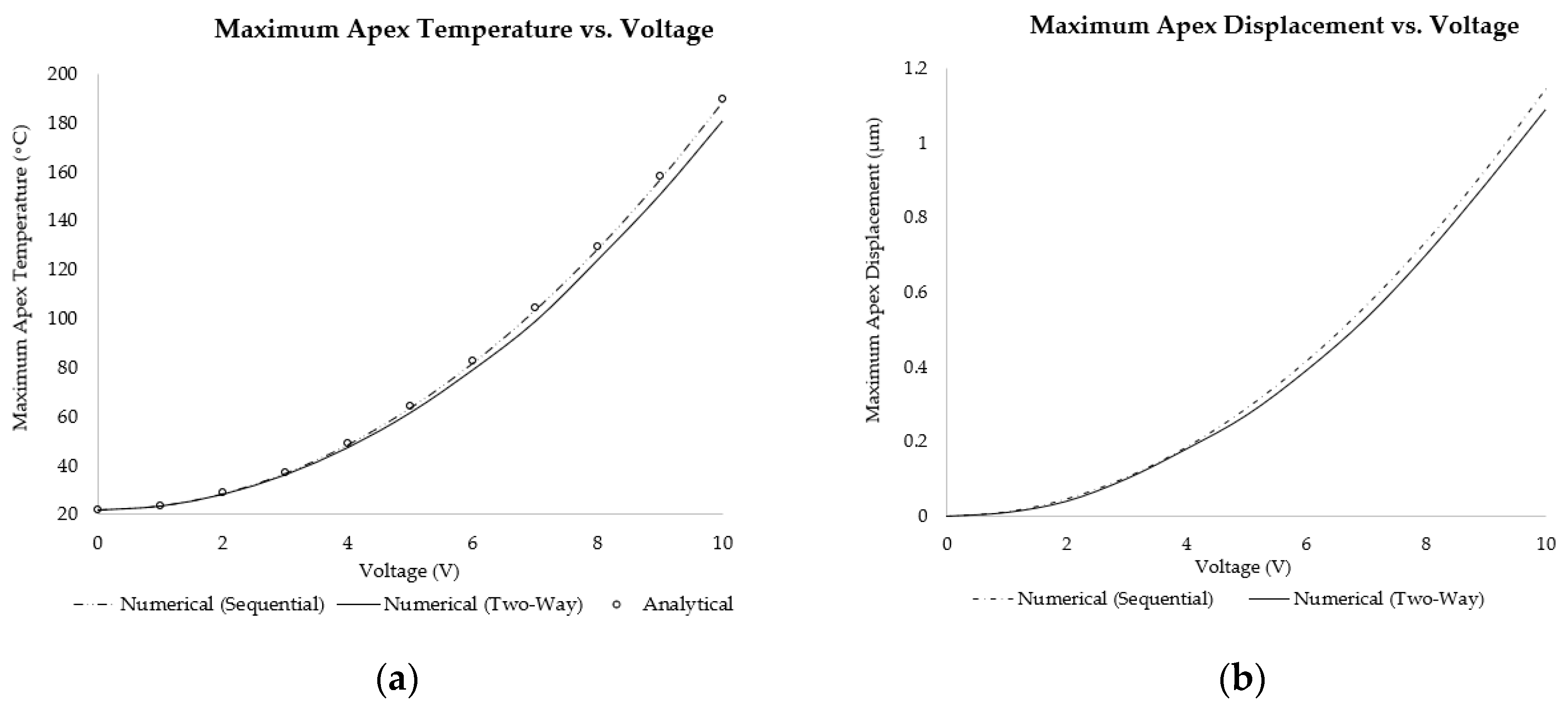
- A potential difference (V) was applied between the gold components (at the anchor sites) by setting one at the positive potential (V+) and the other constantly grounded at 0 V. The positive potential was ramped in a series of quasi-static load steps from 0 V to 10 V in steps of 1 V.
- ii.
- All the substrate volume was thermally fixed at a constant temperature of 22 °C. It was assumed that the substrate, given its bulk form in comparison to the suspended structure, acted as a perfect heat sink and maintained the initial, ambient temperature throughout the process.
- iii.
- A constant convection coefficient of = 25 pW/µm2·K acting on all exposed surfaces was applied as a boundary condition with an ambient temperature (T∞) of 22 °C. This value was chosen to benchmark with an analytical model presented in [14].
- i.
- The only load applied in this analysis was the body temperature from the upstream component. No other external loads were added as the device was being studied as a stand-alone module.
- ii.
- As a mechanical boundary condition, all the substrate volume was assumed as being mechanically fixed, that is, no translations were allowed.
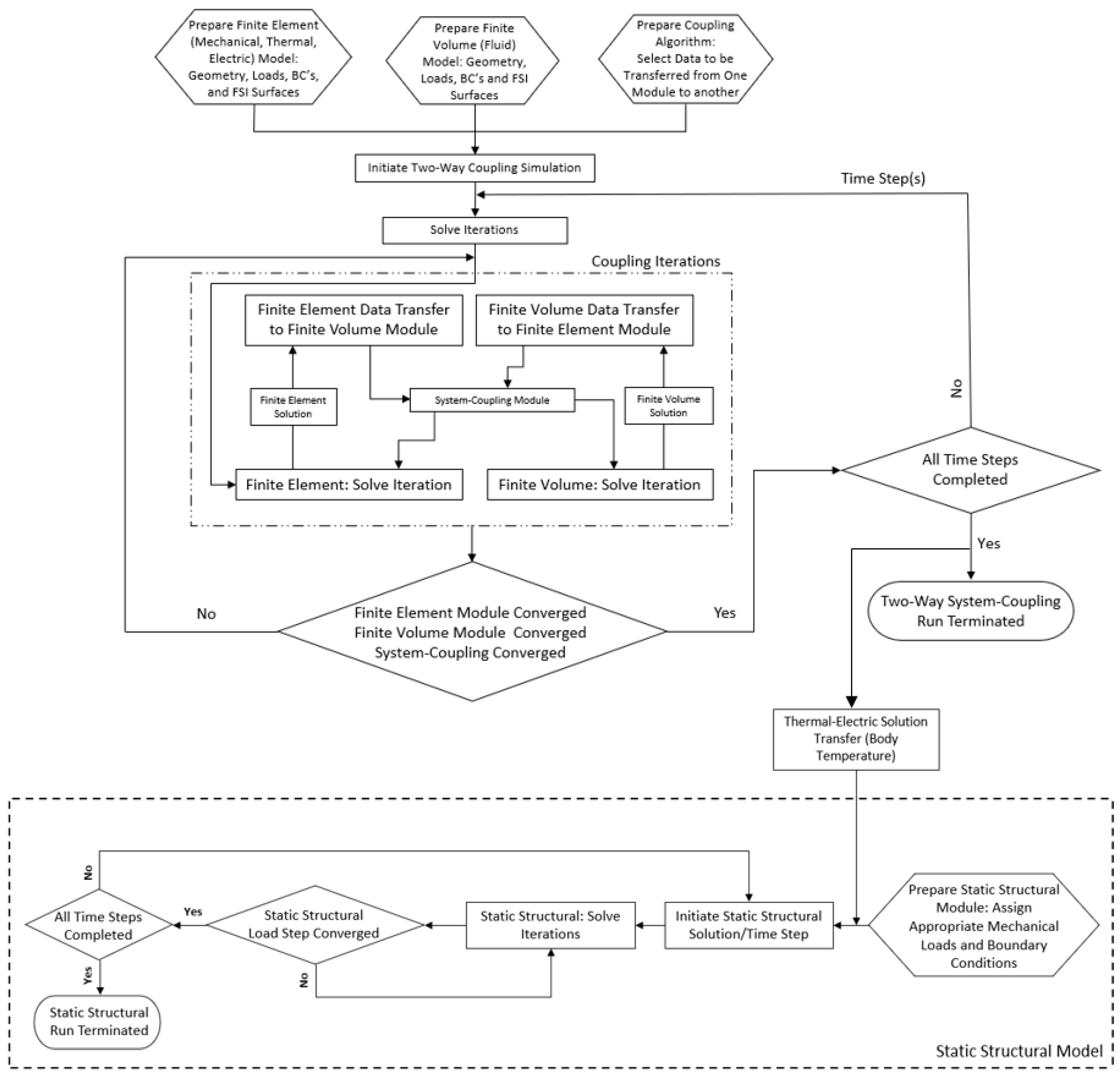
5.2. Two-Way System Coupling
5.2.1. Model Setup—Finite Element
5.2.2. Model Setup—Finite Volume
5.2.3. Data Transfer at the Fluid–Structure Interface
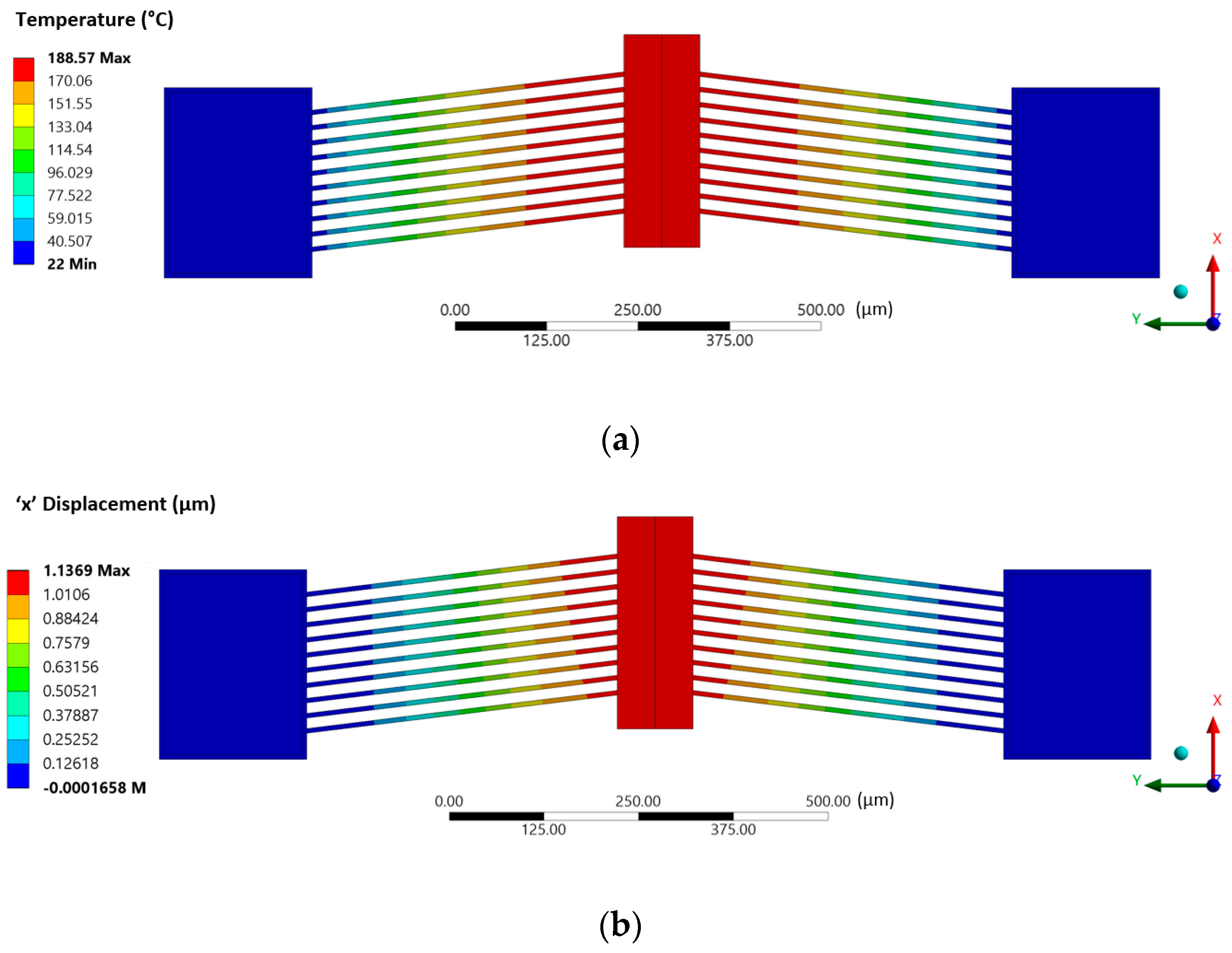
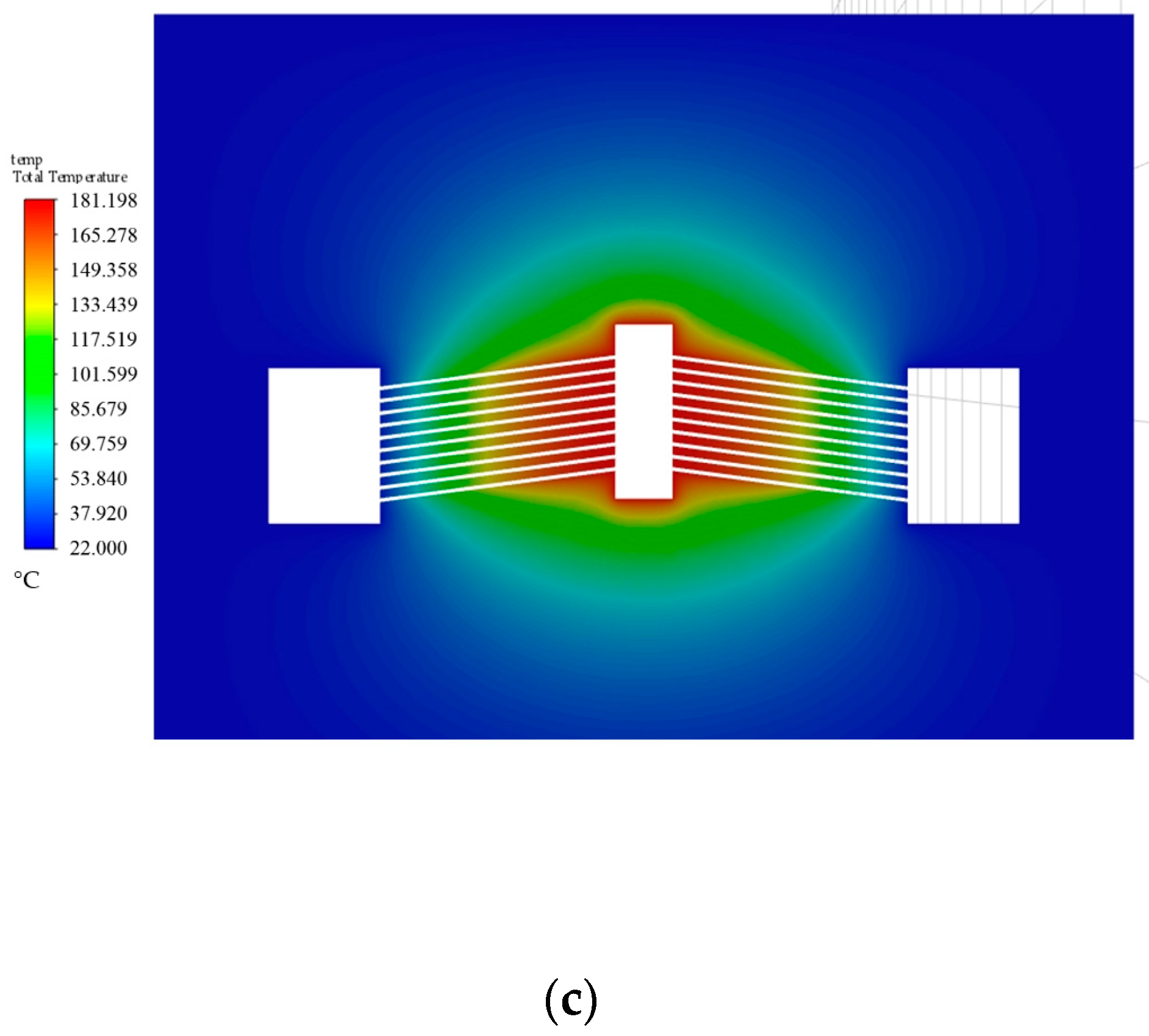
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BC | Boundary condition |
| ETA | Electrothermal actuator |
| FSI | Fluid–structure interface |
| GND | Ground |
| MEMS | Micro-electro-mechanical system |
| SCS | Single crystal silicon |
| SOI | Silicon-on-insulator |
References
- Cauchi, M.; Grech, I.; Mallia, B.; Mollicone, P.; Sammut, N. Analytical, Numerical and Experimental Study of a Horizontal Electrothermal MEMS Microgripper for the Deformability Characterisation of Human Red Blood Cells. Micromachines 2018, 9, 108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cauchi, M.; Grech, I.; Mallia, B.; Mollicone, P.; Sammut, N. The Effects of Structure Thickness, Air Gap Thickness and Silicon Type on the Performance of a Horizontal Electrothermal MEMS Microgripper. Actuators 2018, 7, 38. [Google Scholar] [CrossRef] [Green Version]
- Cauchi, M.; Grech, I.; Mallia, B.; Mollicone, P.; Sammut, N. The Effects of Cold Arm Width and Metal Deposition on the Performance of a U-Beam Electrothermal MEMS Microgripper for Biomedical Applications. Micromachines 2019, 10, 167. [Google Scholar] [CrossRef] [Green Version]
- Chronis, N.; Lee, L. Electrothermally activated SU-8 microgripper for single cell manipulation in solution. J. Microelectromech. Syst. 2005, 14, 857–863. [Google Scholar] [CrossRef]
- Mukundan, V.; Pruitt, B.L. MEMS Electrostatic Actuation in Conducting Biological Media. J. Microelectromech. Syst. 2009, 18, 405–413. [Google Scholar] [CrossRef]
- Boudaoud, M.; Haddab, Y.; Le Gorrec, Y. Modelling of a MEMS-Based Microgripper: Application to Dexterous Micromanipulation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; p. 5634. [Google Scholar] [CrossRef] [Green Version]
- Gursky, B.; Bütefisch, S.; Leester-Schädel, M.; Li, K.; Matheis, B.; Dietzel, A. A Disposable Pneumatic Microgripper for Cell Manipulation with Image-Based Force Sensing. Micromachines 2019, 10, 707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gnerlich, M.; Perry, S.F.; Tatic-Lucic, S. A submersible piezoresistive MEMS lateral force sensor for a diagnostic biomechanics platform. Sens. Actuators A Phys. 2012, 188, 111–119. [Google Scholar] [CrossRef]
- Dochshanov, A.; Verotti, M.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Operational Strategy. J. Mech. Des. 2017, 139, 070801. [Google Scholar] [CrossRef]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Mechanical Structure. J. Mech. Des. 2017, 139, 060801. [Google Scholar] [CrossRef]
- Llewellyn-Evans, H.; Griffiths, C.A.; Fahmy, A. Microgripper design and evaluation for automated µ-wire assembly: A survey. Microsyst. Technol. 2020, 26, 1745–1768. [Google Scholar] [CrossRef] [Green Version]
- Potekhina, A.; Wang, C. Review of Electrothermal Actuators and Applications. Actuators 2019, 8, 69. [Google Scholar] [CrossRef] [Green Version]
- Cauchi, M.; Grech, I.; Mallia, B.; Mollicone, P.; Portelli, B.; Sammut, N. Essential design and fabrication considerations for the reliable performance of an electrothermal MEMS microgripper. Microsyst. Technol. 2019, 1–16. [Google Scholar] [CrossRef]
- Thangavel, A.; Rengaswamy, R.; Sukumar, P.K.; Sekar, R. Modelling of Chevron electrothermal actuator and its performance analysis. Microsyst. Technol. 2018, 24, 1767–1774. [Google Scholar] [CrossRef]
- Cowen, A.; Hames, G.; Monk, D.; Wilcenski, S.; Hardy, B. SOIMUMPs Design Handbook; Revision 8; MEMSCAP Inc.: Durham, NC, USA, 2011. [Google Scholar]
- Qu, J.; Zhang, W.; Jung, A.; Cruz, S.S.-D.; Liu, X. Microscale Compression and Shear Testing of Soft Materials Using an MEMS Microgripper With Two-Axis Actuators and Force Sensors. IEEE Trans. Autom. Sci. Eng. 2016, 14, 834–843. [Google Scholar] [CrossRef]
- Majidi Fard Vatan, H.; Hamedi, M.; Salehi, M.; Salmani, H. A Novel Electro-ThermalMicroactuator Design and Simulation; Civilica: Tehran, Iran, 2011. [Google Scholar]
- Boyd, E.J.; Uttamchandani, D. Measurement of the Anisotropy of Young’s Modulus in Single-Crystal Silicon. J. Microelectromech. Syst. 2011, 21, 243–249. [Google Scholar] [CrossRef]
- Hussein, H.; Tahhan, A.; Le Moal, P.; Bourbon, G.; Haddab, Y.; Lutz, P. Dynamic electro-thermo-mechanical modelling of a U-shaped electro-thermal actuator. J. Micromech. Microeng. 2016, 26, 025010. [Google Scholar] [CrossRef]
- Huang, Q.-A.; Lee, N.K.S. Analytical modeling and optimization for a laterally-driven polysilicon thermal actuator. Microsyst. Technol. 1999, 5, 133–137. [Google Scholar] [CrossRef]
- Pan, C.S.; Hsu, W. An electro-thermally and laterally driven polysilicon microactuator. J. Micromech. Microeng. 1997, 7, 7–13. [Google Scholar] [CrossRef]
- Lerch, P.; Slimane, C.K.; Romanowicz, B.; Renaud, P. Modelization and characterization of asymmetrical thermal micro-actuators. J. Micromech. Microeng. 1996, 6, 134–137. [Google Scholar] [CrossRef]
- Lin, L.; Chiao, M. Electrothermal responses of lineshape microstructures. Sens. Actuators A Phys. 1996, 55, 35–41. [Google Scholar] [CrossRef]
- Hickey, R.; Kujath, M.; Hubbard, T. Heat transfer analysis and optimization of two-beam microelectromechanical thermal actuators. J. Vac. Sci. Technol. A 2002, 20, 971–974. [Google Scholar] [CrossRef]
- Hickey, R.; Sameoto, D.; Hubbard, T.; Kujath, M. Time and frequency response of two-arm micromachined thermal actuators. J. Micromech. Microeng. 2002, 13, 40–46. [Google Scholar] [CrossRef]
- Lai, Y.; McDonald, J.; Kujath, M.; Hubbard, T. Force, deflection and power measurements of toggled microthermal actuators. J. Micromech. Microeng. 2003, 14, 49–56. [Google Scholar] [CrossRef]
- Versaci, M.; Jannelli, A.; Morabito, F.; Angiulli, G. A Semi-Linear Elliptic Model for a Circular Membrane MEMS Device Considering the Effect of the Fringing Field. Sensors 2021, 21, 5237. [Google Scholar] [CrossRef] [PubMed]
- Meng, E.; Gassmann, S.; Tai, Y.-C. A Mems Body Fluid Flow Sensor. In Micro Total Analysis Systems 2001; Springer: Dordrecht, The Netherlands, 2001; pp. 167–168. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.-H.; Chen, C.-P.; Chang, C.-M.; Lin, C.-P.; Lin, C.-H.; Fu, L.-M.; Lee, C.-Y. MEMS-based gas flow sensors. Microfluid. Nanofluid. 2009, 6, 333–346. [Google Scholar] [CrossRef]
- ANSYS. Academic Research Mechanical, Release 21.2, Help System, System Coupling User’s Guide; ANSYS, Inc. Available online: https://www.ansys.com/legal/terms-and-conditions (accessed on 16 December 2021).
- Chimakurthi, S.K.; Reuss, S.; Tooley, M.; Scampoli, S. ANSYS Workbench System Coupling: A state-of-the-art computational framework for analyzing multiphysics problems. Eng. Comput. 2017, 34, 385–411. [Google Scholar] [CrossRef]
- ANSYS. Academic Research Mechanical, Release 21.1, Help System, ANSYS Fluent Theory Guide; ANSYS, Inc. Available online: https://www.ansys.com/legal/terms-and-conditions (accessed on 16 December 2021).
- ANSYS. Academic Research Mechanical, Release 15.0, Help System, ANSYS Fluent User’s Guide; ANSYS, Inc. Available online: https://www.ansys.com/legal/terms-and-conditions (accessed on 16 December 2021).
- Somà, A.; Iamoni, S.; Voicu, R.; Müller, R.; Al-Zandi, M.H.M.; Wang, C. Design and experimental testing of an electro-thermal microgripper for cell manipulation. Microsyst. Technol. 2017, 24, 1053–1060. [Google Scholar] [CrossRef]
- Ulkir, O. Design and fabrication of an electrothermal MEMS micro-actuator with 3D printing technology. Mater. Res. Express 2020, 7, 075015. [Google Scholar] [CrossRef]
- Enikov, E.; Kedar, S.; Lazarov, K. Analytical and Experimental Analysis of Folded Beam and V-Shaped Thermal Microactuators. In Proceedings of the SEM 10th International Congress and Exposition, Costa Mesa, CA, USA, 7–10 June 2004. [Google Scholar]
- Lin, L.; Wu, H.; Xue, L.; Shen, H.; Huang, H.; Chen, L. Heat Transfer Scale Effect Analysis and Parameter Measurement of an Electrothermal Microgripper. Micromachines 2021, 12, 309. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Distance from anchor to centre of shuttle parallel to beams, L (µm) | 464 |
| Width of beams, (µm) | 6 |
| Beam spacing, (µm) | 10 |
| Pre-bend angle, θ (°) | 7 |
| Number of beams per side | 10 |
| SOI silicon thickness, tSOI (µm) | 25 |
| Property | SOI | Pad Metal |
|---|---|---|
| Young’s modulus, E (GPa) | Ex = Ey = 169, Ez = 130 | 57 |
| Shear modulus, G (GPa) | Gyz = Gzx = 79.6, Gxy = 50.9 | N/A |
| Poisson’s ratio, ν | νyz = 0.36, νzx = 0.29, νxy = 0.064 | 0.35 |
| Density (g/(cm)3) | 2.50 | 19.30 |
| Thermal conductivity, k (W/m·K) | 148 | 297 |
| Electrical resistivity (µΩ.m) | 500 | 2.86 × 10−2 |
| Specific heat capacity, c (J/kg·K) | 712 | 128.7 |
| Coefficient of thermal expansion, α (µm/m·K) | 2.5 | N/A |
| Data Source | Target Module | Source Variable | Affected Target Variable |
|---|---|---|---|
| Finite Volume | Finite Element | Heat Transfer Coefficient | Convection Coefficient |
| Finite Volume | Finite Element | Near-Wall Temperature | Convection Reference Temperature |
| Finite Element | Finite Volume | Temperature | Temperature |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sciberras, T.; Demicoli, M.; Grech, I.; Mallia, B.; Mollicone, P.; Sammut, N. Coupled Finite Element-Finite Volume Multi-Physics Analysis of MEMS Electrothermal Actuators. Micromachines 2022, 13, 8. https://doi.org/10.3390/mi13010008
Sciberras T, Demicoli M, Grech I, Mallia B, Mollicone P, Sammut N. Coupled Finite Element-Finite Volume Multi-Physics Analysis of MEMS Electrothermal Actuators. Micromachines. 2022; 13(1):8. https://doi.org/10.3390/mi13010008
Chicago/Turabian StyleSciberras, Thomas, Marija Demicoli, Ivan Grech, Bertram Mallia, Pierluigi Mollicone, and Nicholas Sammut. 2022. "Coupled Finite Element-Finite Volume Multi-Physics Analysis of MEMS Electrothermal Actuators" Micromachines 13, no. 1: 8. https://doi.org/10.3390/mi13010008
APA StyleSciberras, T., Demicoli, M., Grech, I., Mallia, B., Mollicone, P., & Sammut, N. (2022). Coupled Finite Element-Finite Volume Multi-Physics Analysis of MEMS Electrothermal Actuators. Micromachines, 13(1), 8. https://doi.org/10.3390/mi13010008