Translational MEMS Platform for Planar Optical Switching Fabrics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design Considerations
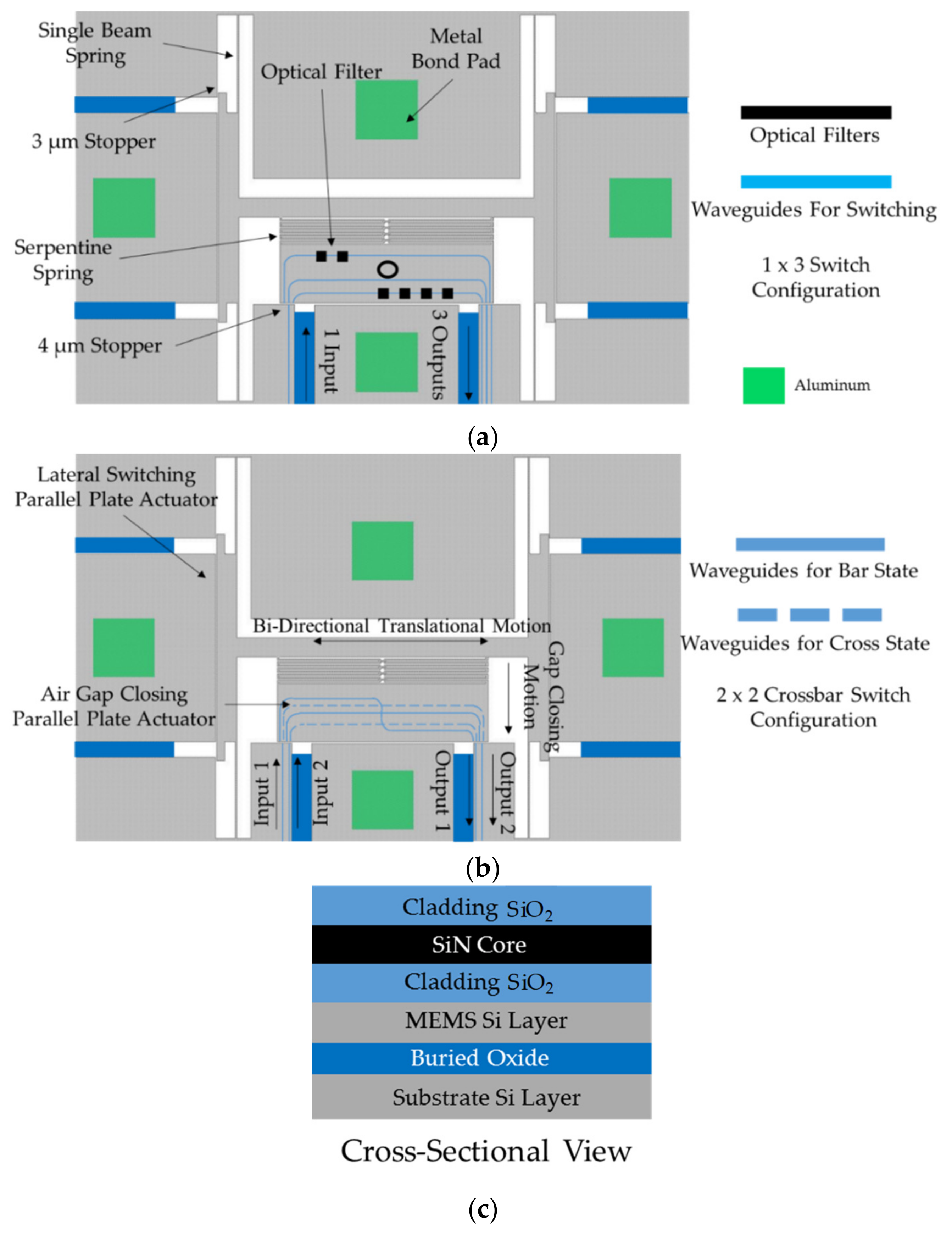
2.1. Translational MEMS Platform for Optical Switching
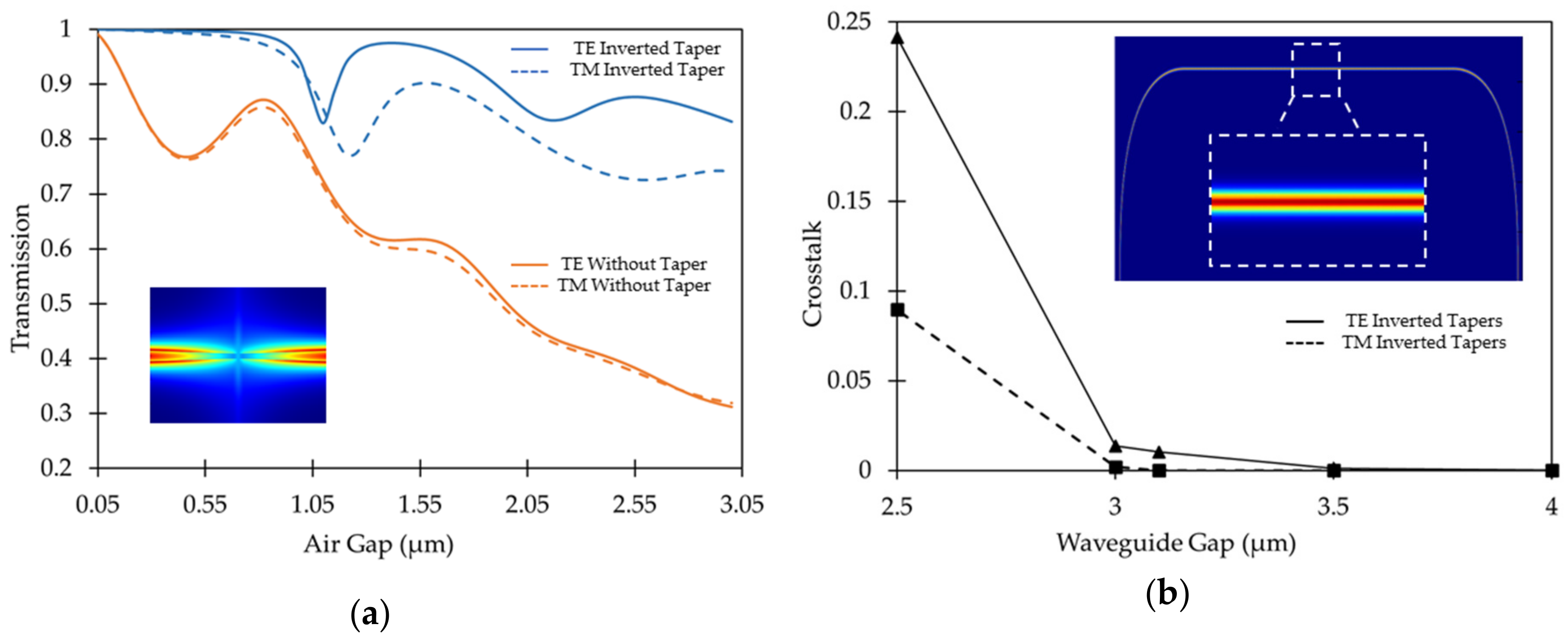
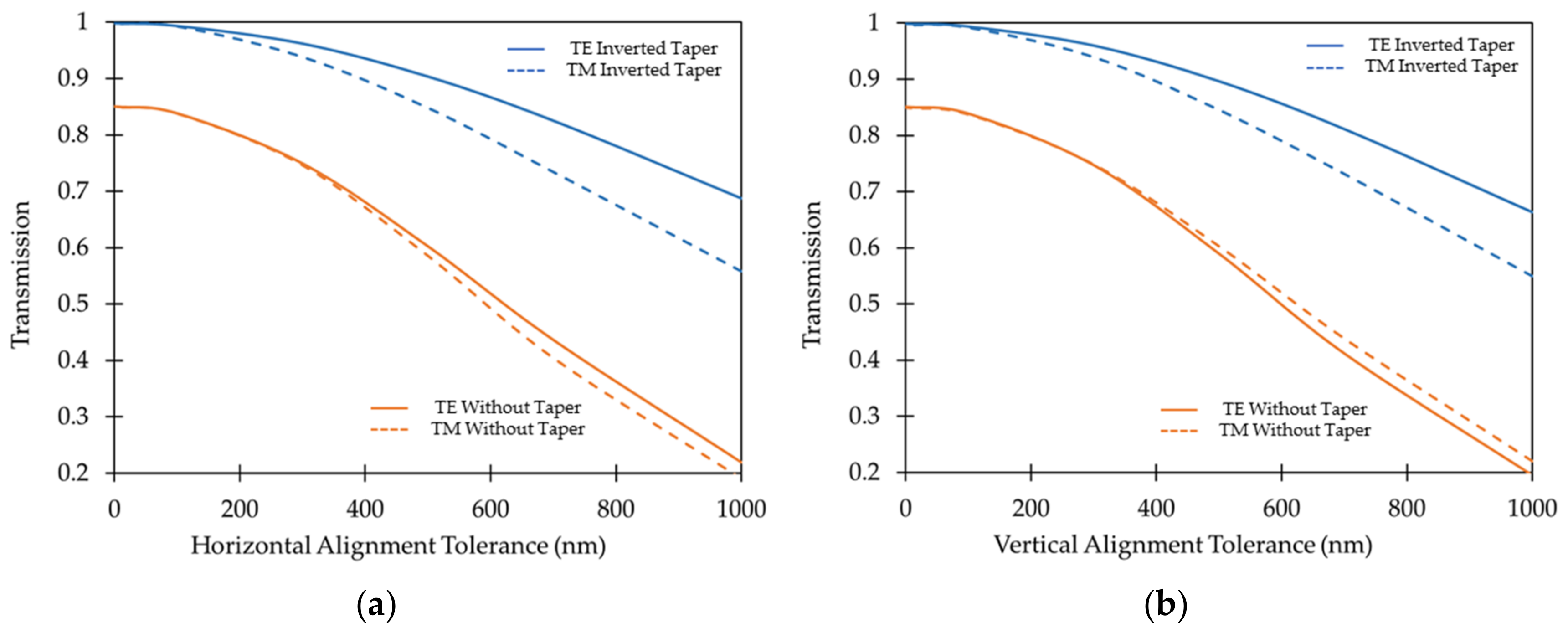
2.2. Optical Design Considerations
2.3. MEMS Design Considerations
3. Final Translational MEMS Platform
4. Experimental Results
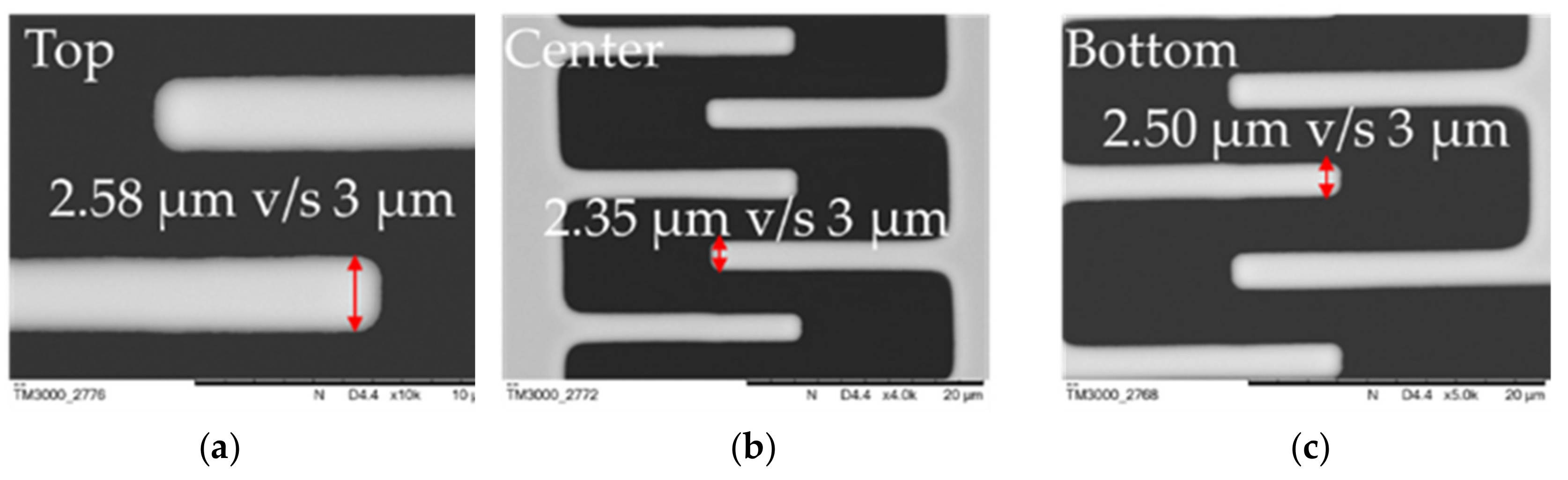
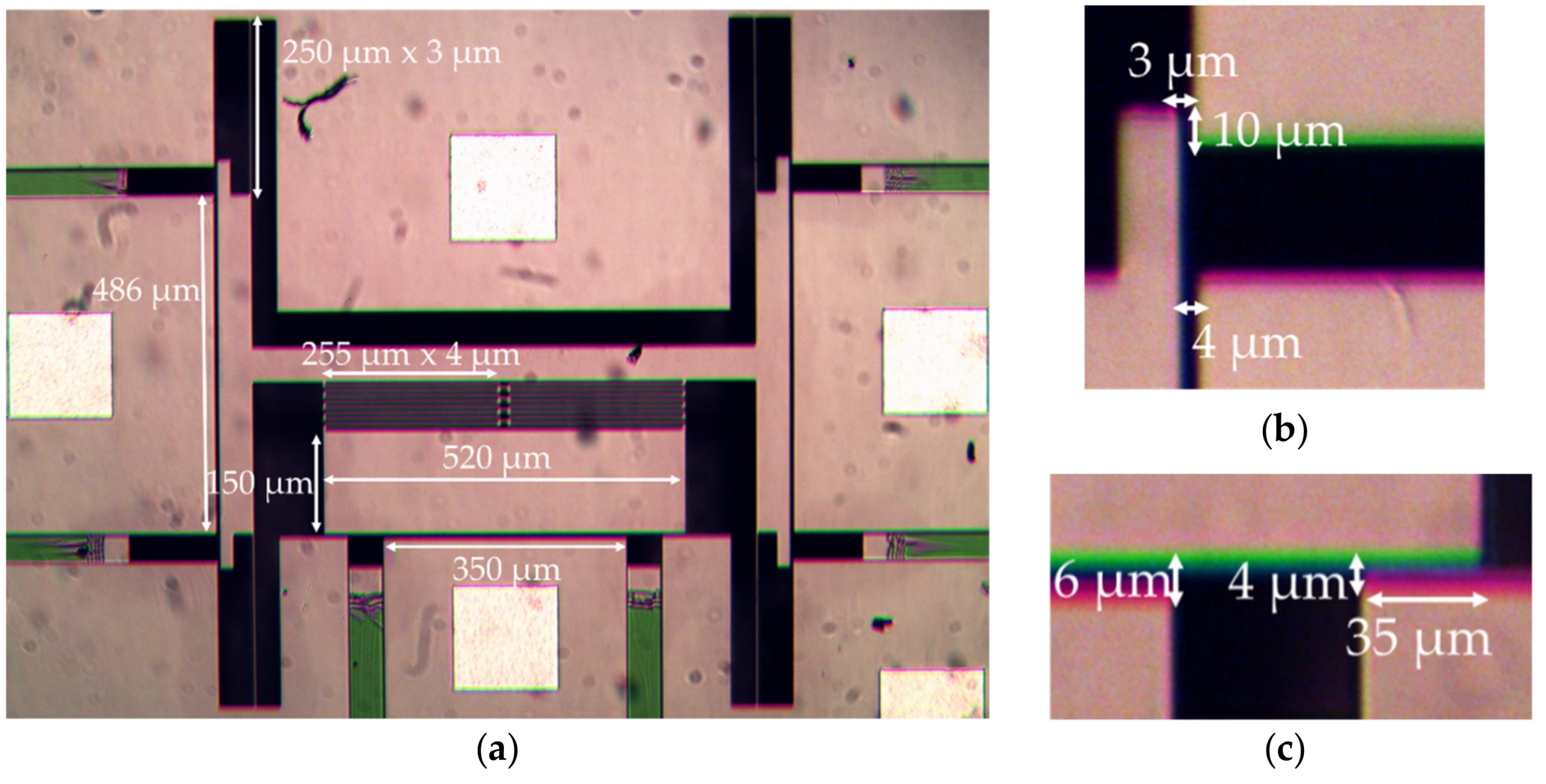
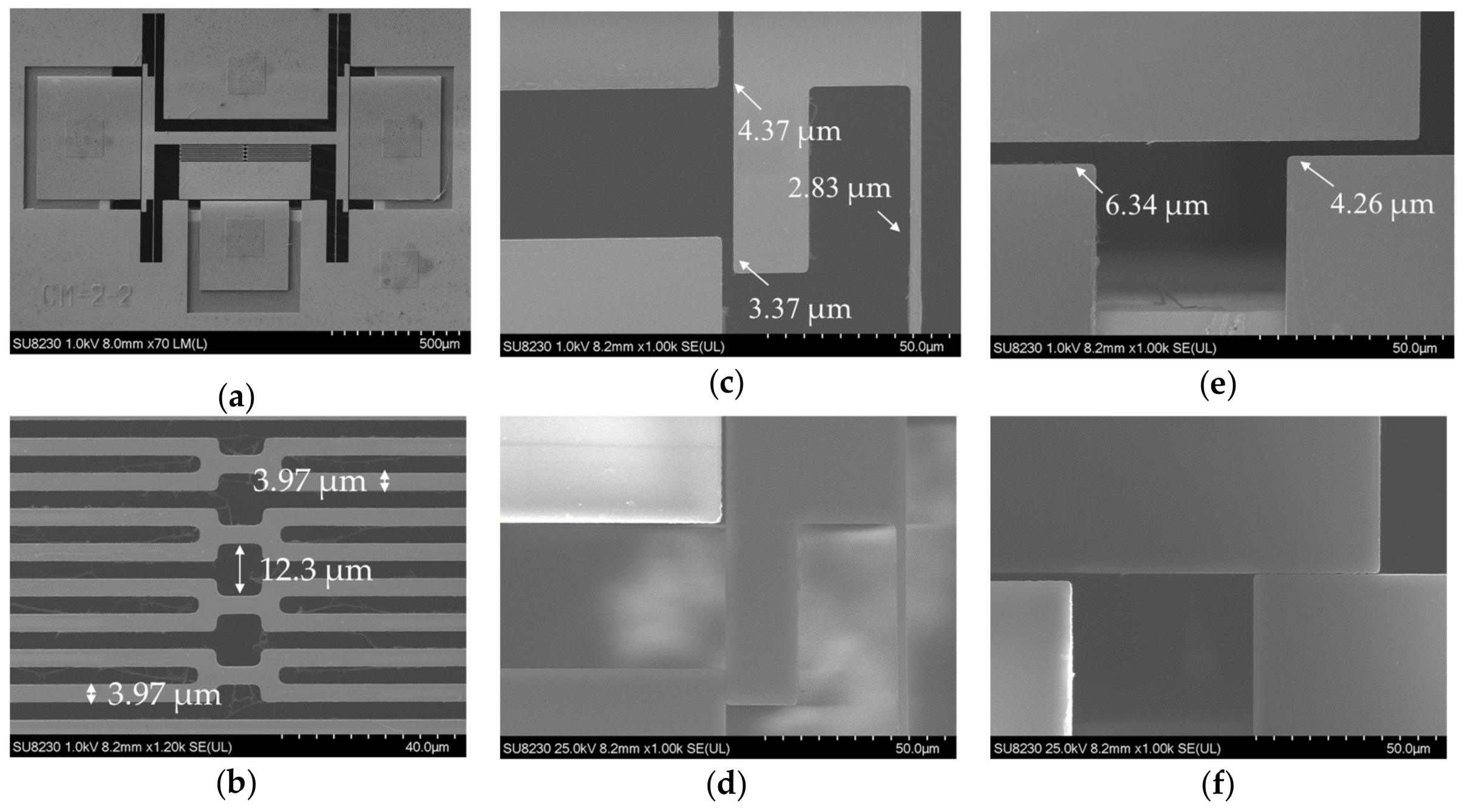
4.1. Microfabrication Results
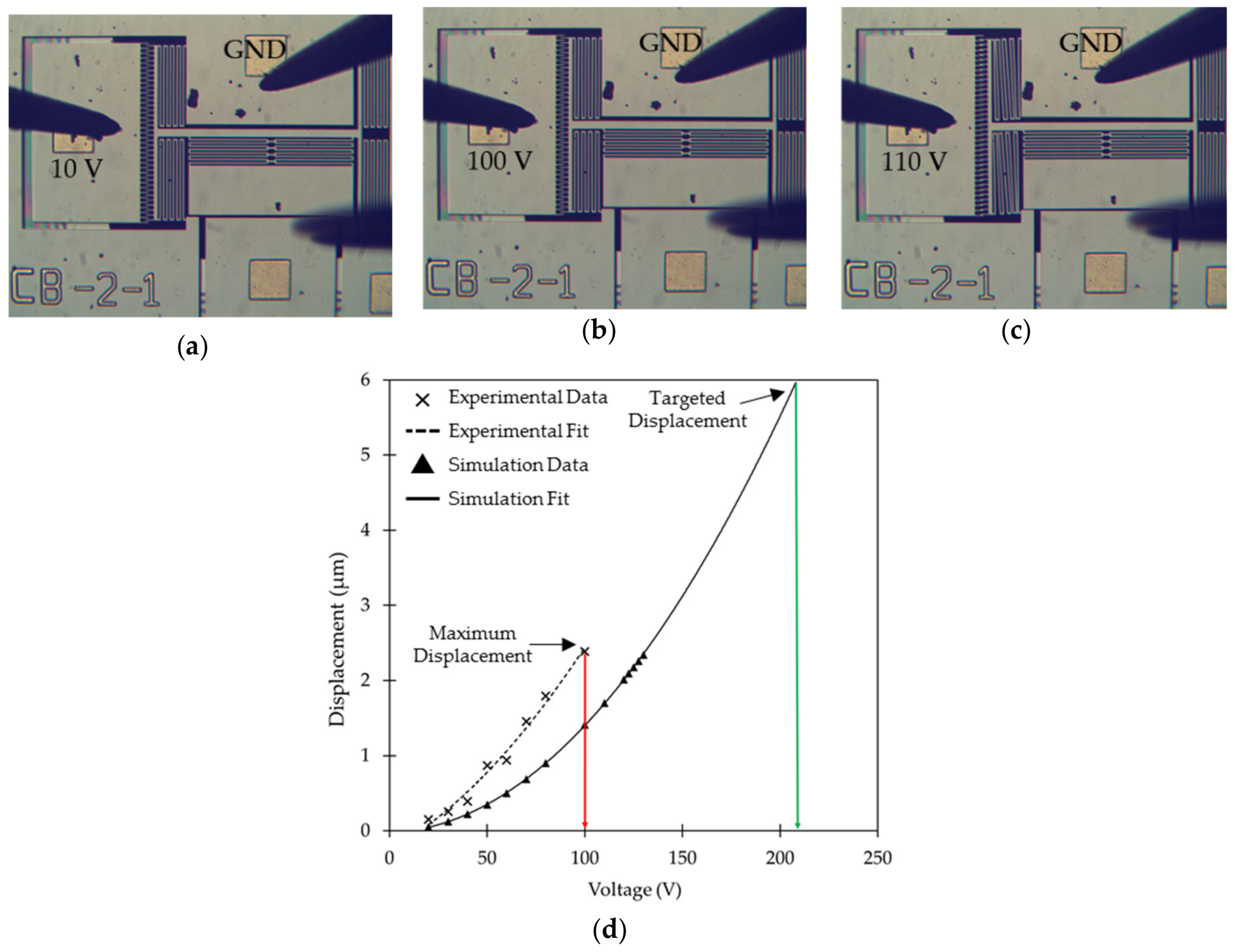
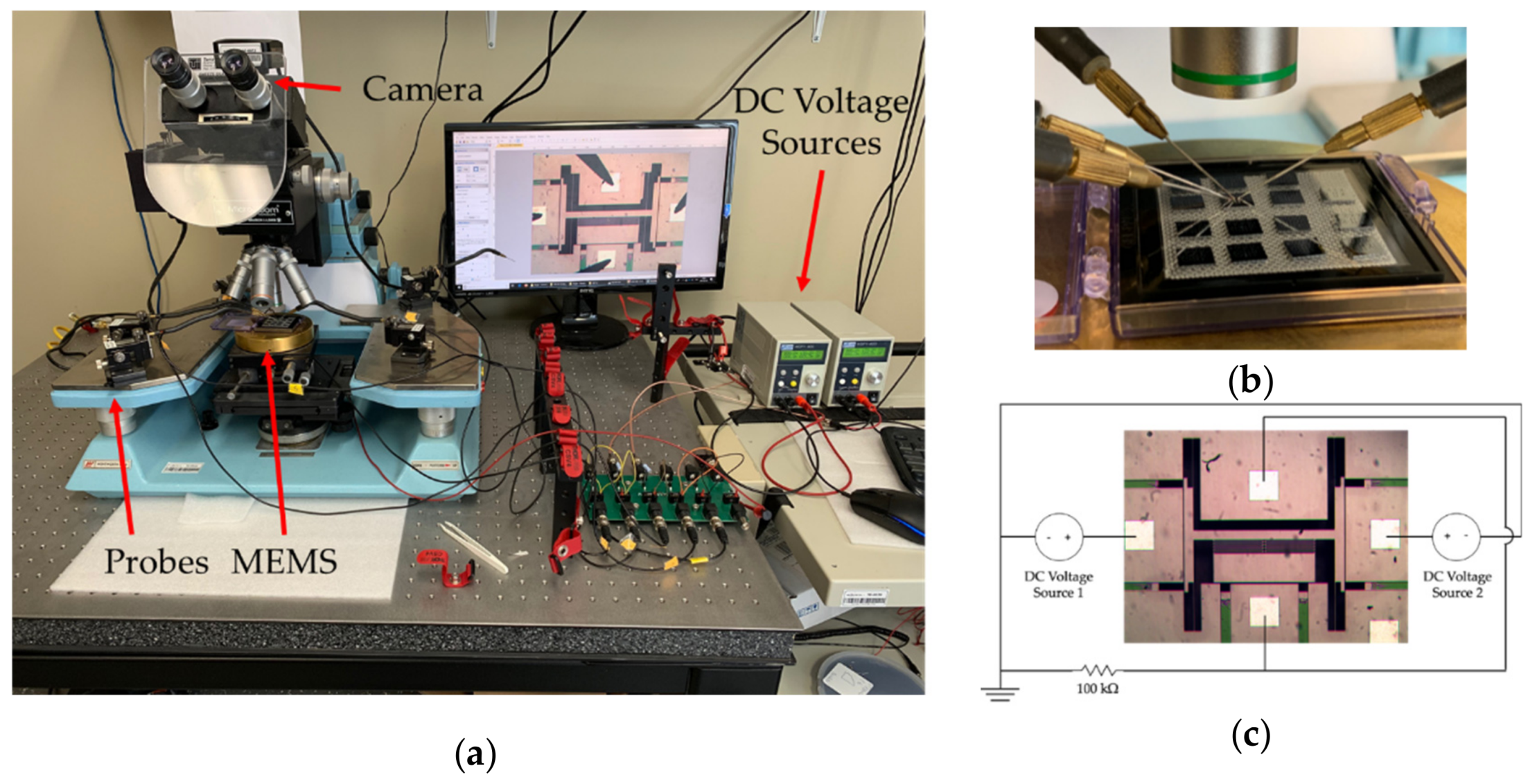
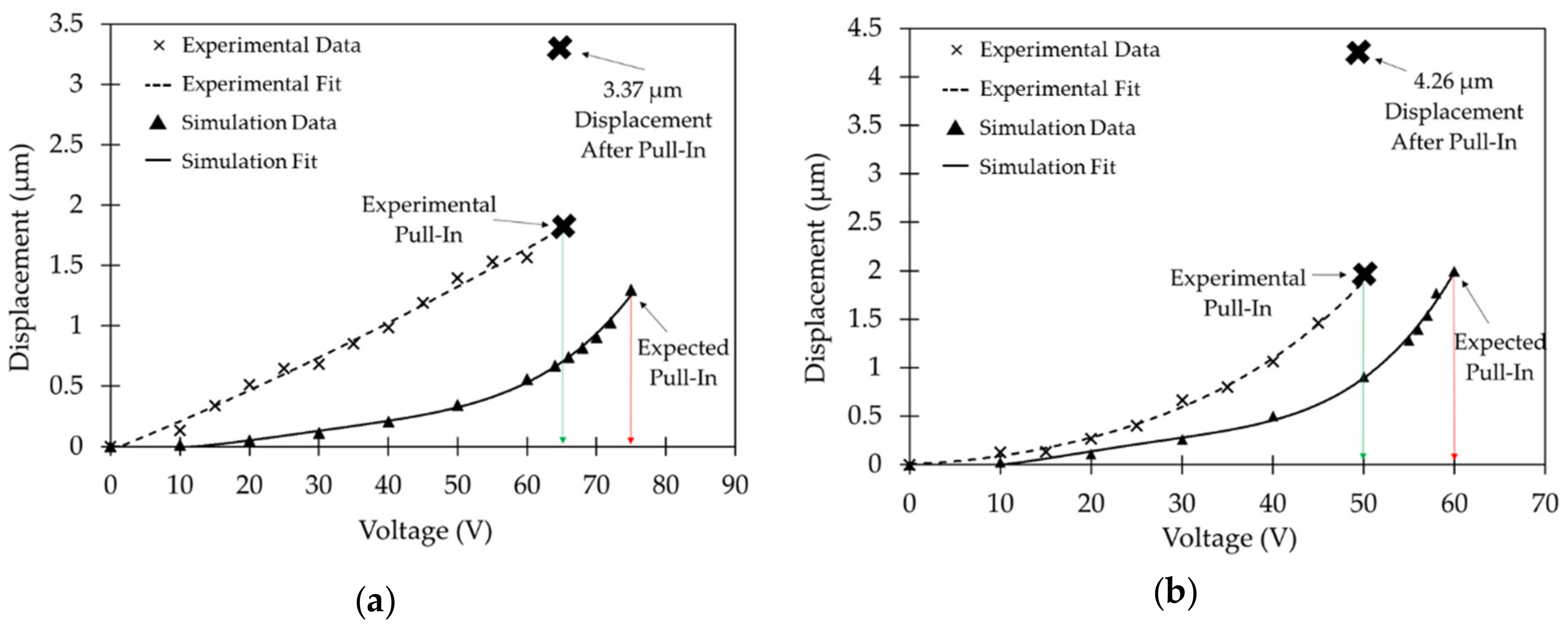
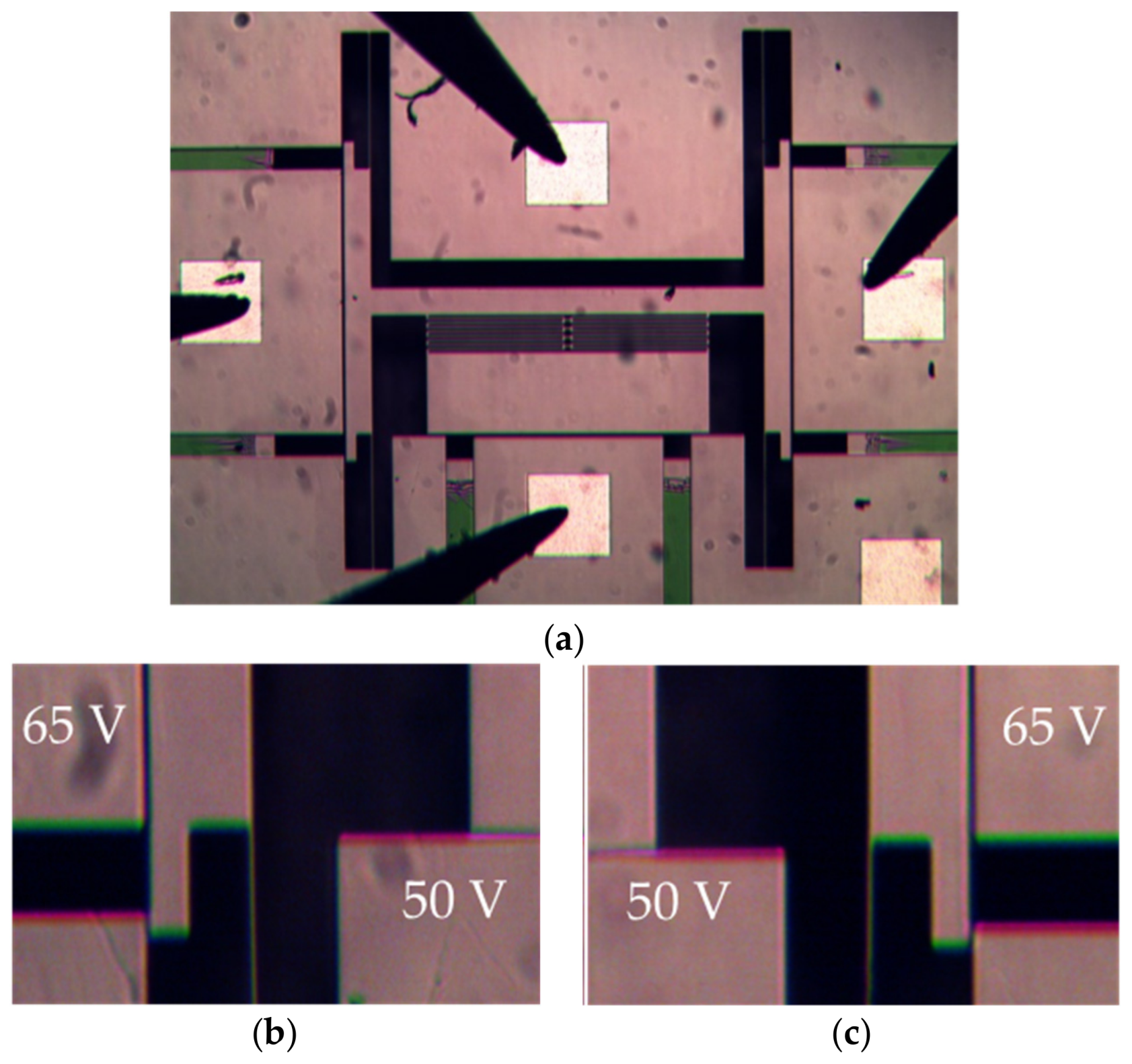
4.2. Actuation Test Results
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Monk, D.W.; Gale, R.O. The Digital Micromirror Device for Projection Display Deformable Membrane Displays. Microelectron. Eng. 1995, 27, 489–493. [Google Scholar] [CrossRef]
- Holmström, S.T.S.; Baran, U.; Urey, H. MEMS laser scanners: A review. J. Microelectromech. Syst. 2014, 23, 259–275. [Google Scholar] [CrossRef]
- Kaajakari, V. Practical MEMS: Design of Microsystems, Accelerometers, Gyroscopes, RF MEMS, Optical MEMS, and Microfluidic Systems; Small Gear Publishing: Las Vegas, NV, USA, 2009; ISBN 0982299109. [Google Scholar]
- Hammadi, A.; Mhamdi, L. A survey on architectures and energy efficiency in Data Center Networks. Comput. Commun. 2014, 40, 1–21. [Google Scholar] [CrossRef]
- Farrington, N.; Porter, G.; Radhakrishnan, S.; Bazzaz, H.H.; Subramanya, V.; Fainman, Y.; Papen, G.; Vahdat, A. Helios: A Hybrid Electrical/Optical Switch Architecture for Modular Data Centers. ACM SIGCOMM Comput. Commun. Rev. 2010, 40, 339–350. [Google Scholar] [CrossRef]
- Ménard, F.D.; Bérard, M.; Prescott, R. Scaled Out Optically Switched (SOOS) network architecture for Web Scale Data Centers. 2015 IEEE Opt. Interconnects Conf. (OI) 2015, 15, 90–91. [Google Scholar]
- Kim, J.; Nuzman, C.J.; Kumar, B.; Lieuwen, D.F.; Kraus, J.S.; Weiss, A.; Lichtenwalner, C.P.; Papazian, A.R.; Frahm, R.E.; Basavanhally, N.R.; et al. 1100 × 1100 Port MEMS-Based Optical Crossconnect With 4-dB Maximum Loss. IEEE Photonics Technol. Lett. 2003, 15, 1537–1539. [Google Scholar] [CrossRef]
- Truex, T.A.; Bent, A.A.; Hagood, N.W. Beam-Steering Optical Switch Fabric Utilizing Piezoelectric Actuation Technology; Continuum Photonics Inc.: Billerica, MA, USA, 2003. [Google Scholar]
- Fernandez, A. Modular MEMS design and fabrication for an 80 × 80 transparent optical cross-connect switch. Proc. SPIE 2004, 5604, 208–217. [Google Scholar]
- Aksyuk, V.A.; Pardo, F.; Bolle, C.A.; Arney, S.; Giles, C.R.; Bishop, D.J. Lucent Microstar micromirror array technology for large optical crossconnects. MOEMS Miniaturized Syst. 2003, 4178, 320–324. [Google Scholar]
- Li, S.; Xu, J.; Zhong, S.; Wu, Y. Design, fabrication and characterization of a high fill-factor micromirror array for wavelength selective switch applications. Sens. Actuators A Phys. 2011, 171, 274–282. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, J.; Zhong, S.; Wu, Y. Large size MEMS scanning mirror with vertical comb drive for tunable optical filter. Opt. Lasers Eng. 2013, 51, 54–60. [Google Scholar] [CrossRef]
- Koh, K.H.; Lee, C.; Kobayashi, T. A piezoelectric-driven three-dimensional MEMS VOA using attenuation mechanism with combination of rotational and translational effects. J. Microelectromech. Syst. 2010, 19, 1370–1379. [Google Scholar] [CrossRef]
- Microactuator, I.; Man, A.; Kwan, H.; Member, S.; Song, S.; Member, S.; Lu, X.; Lu, L.; Teh, Y.; Member, S.; et al. Improved Designs for an Electrothermal In-Plane Microactuator. J. Microelectromech. Syst. 2012, 21, 586–595. [Google Scholar]
- Member, S.; Lohmann, A. MOEMS Tuning Element for a Littrow External Cavity Laser. J. Microelectromech. Syst. 2003, 12, 921–928. [Google Scholar]
- Puder, J.M.; Bedair, S.S.; Pulskamp, J.S.; Rudy, R.Q.; Polcawich, R.G.; Bhave, S.A. Higher dimensional flexure mode for enhanced effective electromechanical coupling in PZT-on-silicon MEMS resonators. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 2017–2020. [Google Scholar]
- Cassella, C.; Chen, G.; Qian, Z.; Hummel, G.; Rinaldi, M. RF passive components based on aluminum nitride cross-sectional lamé-mode MEMS resonators. IEEE Trans. Electron Devices 2017, 64, 237–243. [Google Scholar] [CrossRef]
- Kim, S.J.; Cho, Y.H.; Nam, H.J.; Bu, J.U. Piezoelectrically pushed rotational micromirrors using detached PZT actuators for wide-angle optical switch applications. J. Micromech. Microeng. 2008, 18, 125022. [Google Scholar] [CrossRef]
- Panda, P.K.; Sahoo, B. PZT to lead free piezo ceramics: A review. Ferroelectrics 2015, 474, 128–143. [Google Scholar] [CrossRef]
- Tonisch, K.; Cimalla, V.; Foerster, C.; Romanus, H.; Ambacher, O.; Dontsov, D. Piezoelectric properties of polycrystalline AlN thin films for MEMS application. Sens. Actuators A Phys. 2006, 132, 658–663. [Google Scholar] [CrossRef]
- Iborra, E.; Olivares, J.; Clement, M.; Vergara, L.; Sanz-Hervás, A.; Sangrador, J. Piezoelectric properties and residual stress of sputtered AlN thin films for MEMS applications. Sens. Actuators A Phys. 2004, 115, 501–507. [Google Scholar] [CrossRef]
- Liu, L.; Pal, S.; Xie, H. Sensors and Actuators A: Physical MEMS mirrors based on a curved concentric electrothermal actuator. Sens. Actuators A. Phys. 2012, 188, 349–358. [Google Scholar] [CrossRef]
- Peters, T.J.; Tichem, M. Electrothermal actuators for SiO2 photonic MEMS. Micromachines 2016, 7, 200. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.X.; Liu, A.Q. Advanced fiber optical switches using deep RIE (DRIE) fabrication. Sens. Actuators A Phys. 2003, 102, 286–295. [Google Scholar] [CrossRef]
- Sabry, Y.M.; Eltagoury, Y.M.; Shebl, A.; Soliman, M.; Sadek, M.; Khalil, D. In-plane deeply-etched optical MEMS notch filter with high-speed tunability. J. Opt. 2015, 17, 125703. [Google Scholar] [CrossRef]
- Brière, J.; Beaulieu, P.-O.; Saidani, M.; Nabki, F.; Menard, M. Rotational MEMS mirror with latching arm for silicon photonics. Proc. SPIE 2015, 9375, 937507. [Google Scholar]
- Cowen, A.; Hames, G.; Glukh, K.; Hardy, B. PiezoMUMPs Design Handbook; rev. 1.3; MEMSCAP Inc.: Bernin, France, 2014. [Google Scholar]
- Chu, H.M.; Hane, K. Design, fabrication and vacuum operation characteristics of two-dimensional comb-drive micro-scanner. Sens. Actuators A Phys. 2011, 165, 422–430. [Google Scholar] [CrossRef]
- Srinivasan, P.; Gollasch, C.O.; Kraft, M. Three dimensional electrostatic actuators for tunable optical micro cavities. Sens. Actuators A Phys. 2010, 161, 191–198. [Google Scholar] [CrossRef]
- Lee, L.P.; Kwon, S.; Member, S.; Milanovic, V. Vertical Combdrive Based 2-D Gimbaled Micromirrors With Large Static Rotation by Backside Island Isolation. IEEE J. Sel. Top. Quantum Electron. 2004, 10, 498–504. [Google Scholar]
- Zhao, R.; Qiao, D.; Song, X.; You, Q. The exploration for an appropriate vacuum level for performance enhancement of a comb-drive microscanner. Micromachines 2017, 8, 126. [Google Scholar] [CrossRef]
- Hung, A.C.L.; Lai, H.Y.H.; Lin, T.W.; Fu, S.G.; Lu, M.S.C. An electrostatically driven 2D micro-scanning mirror with capacitive sensing for projection display. Sens. Actuators A Phys. 2015, 222, 122–129. [Google Scholar] [CrossRef]
- Zhang, W.; Li, P.; Zhang, X.; Wang, Y.; Hu, F. InGaN/GaN micro mirror with electrostatic comb drive actuation integrated on a patterned silicon-on-insulator wafer. Opt. Express 2018, 26, 7672. [Google Scholar] [CrossRef]
- Dziuban, P.; Laszczyk, K.; Bargiel, S.; Gorecki, C.; Kr, J.; Callet, D.; Frank, S. A two directional electrostatic comb-drive X–Y micro-stage for MOEMS applications. Sens. Actuators A Phys. 2010, 163, 255–265. [Google Scholar]
- Xue, G.; Toda, M.; Ono, T. Assembled comb-drive XYZ-microstage with large displacements for low temperature measurement systems. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015. [Google Scholar]
- Bulgan, E.; Kanamori, Y.; Hane, K. Submicron silicon waveguide optical switch driven by microelectromechanical actuator. Appl. Phys. Lett. 2008, 92, 1–4. [Google Scholar] [CrossRef]
- Abe, S.; Hane, K. Variable-gap silicon photonic waveguide coupler switch with a nanolatch mechanism. IEEE Photonics Technol. Lett. 2013, 25, 675–677. [Google Scholar] [CrossRef]
- Munemasa, Y.; Hane, K. Compact 1 × 3 silicon photonic waveguide switch based on precise investigation of coupling characteristics of variable-gap coupler. Jpn. J. Appl. Phys. 2013, 52, 06GL15. [Google Scholar] [CrossRef]
- Liu, H.B.; Chollet, F. Moving polymer waveguides and latching actuator for 2 × 2 MEMS optical switch. J. Microelectromech. Syst. 2009, 18, 715–724. [Google Scholar]
- Han, S.; Seok, T.J.; Quack, N.; Yoo, B.-W.; Wu, M.C. Large-scale silicon photonic switches with movable directional couplers. Optica 2015, 2, 1–6. [Google Scholar] [CrossRef]
- Seok, T.J.; Quack, N.; Han, S.; Muller, R.S.; Wu, M.C. Large-scale broadband digital silicon photonic switches with vertical adiabatic couplers. Optica 2016, 3, 64. [Google Scholar] [CrossRef]
- Brière, J.; Elsayed, M.Y.; Saidani, M.; Bérard, M.; Beaulieu, P.O.; Rabbani-Haghighi, H.; Nabki, F.; Ménard, M. Rotating circular micro-platform with integrated waveguides and latching arm for reconfigurable integrated optics. Micromachines 2017, 8, 354. [Google Scholar] [CrossRef] [PubMed]
- Ménard, M.; Elsayed, M.Y.; Brière, J.; Rabbani-Haghighi, H.; Saidani, M.; Bérard, M.; Ménard, F.; Nabki, F. Integrated optical switch controlled with a MEMS rotational electrostatic actuator. In Proceedings of the Photonics in Switching, New Orleans, LA, USA, 24–27 July 2017. [Google Scholar]
- Tabti, B.; Nabki, F.; Ménard, M. Polarization insensitive Bragg gratings in silicon nitride waveguides. In Proceedings of the Integrated Photonics Research, Silicon, and NanoPhotonics, New Orleans, LA, USA, 24–27 July 2017. [Google Scholar]
- Gondarenko, A.; Levy, J.S.; Lipson, M. High confinement micron-scale silicon nitride high Q ring resonator. Opt. Express 2009, 17, 11366. [Google Scholar] [CrossRef] [PubMed]
- Jones, A.M.; DeRose, C.T.; Lentine, A.L.; Trotter, D.C.; Starbuck, A.L.; Norwood, R.A. Ultra-low crosstalk, CMOS compatible waveguide crossings for densely integrated photonic interconnection networks. Opt. Express 2013, 21, 12002. [Google Scholar] [CrossRef]
- Legtenberg, R.; Groeneveld, A.W.; Elwenspoek, M. Comb-drive actuators for large displacements. J. Micromech. Microeng. 1996, 6, 320–329. [Google Scholar] [CrossRef]
- Han, S.; Seok, T.J.; Yu, K.; Quack, N.; Muller, R.S.; Wu, M.C. Large-Scale Polarization-Insensitive Silicon Photonic MEMS Switches. J. Light. Technol. 2018, 36, 1824–1830. [Google Scholar] [CrossRef]
- Nakamura, S.; Yanagimachi, S.; Takeshita, H.; Tajima, A.; Hino, T.; Fukuchi, K. Optical Switches Based on Silicon Photonics for ROADM Application. IEEE J. Sel. Top. Quantum Electron. 2016, 22, 185–193. [Google Scholar] [CrossRef]
- Strasser, T.A.; Wagener, J.L. Wavelength-selective switches for ROADM applications. IEEE J. Sel. Top. Quantum Electron. 2010, 16, 1150–1157. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.; Kohli, N.; Brière, J.; Ménard, M.; Nabki, F. Translational MEMS Platform for Planar Optical Switching Fabrics. Micromachines 2019, 10, 435. https://doi.org/10.3390/mi10070435
Sharma S, Kohli N, Brière J, Ménard M, Nabki F. Translational MEMS Platform for Planar Optical Switching Fabrics. Micromachines. 2019; 10(7):435. https://doi.org/10.3390/mi10070435
Chicago/Turabian StyleSharma, Suraj, Niharika Kohli, Jonathan Brière, Michaël Ménard, and Frederic Nabki. 2019. "Translational MEMS Platform for Planar Optical Switching Fabrics" Micromachines 10, no. 7: 435. https://doi.org/10.3390/mi10070435
APA StyleSharma, S., Kohli, N., Brière, J., Ménard, M., & Nabki, F. (2019). Translational MEMS Platform for Planar Optical Switching Fabrics. Micromachines, 10(7), 435. https://doi.org/10.3390/mi10070435