Design, Fabrication and Experiment of Double U-Beam MEMS Vibration Ring Gyroscope

 ,
,  and
and
Abstract
1. Introduction
2. MEMS DUVRG Working Principle
2.1. MEMS DUVRG Structure
2.2. MEMS DUVRG Working Principle
3. MEMS DUVRG Structure Design
3.1. DUVRG Stiffness Model
3.2. DUVRG Structure Finite Element Analysis
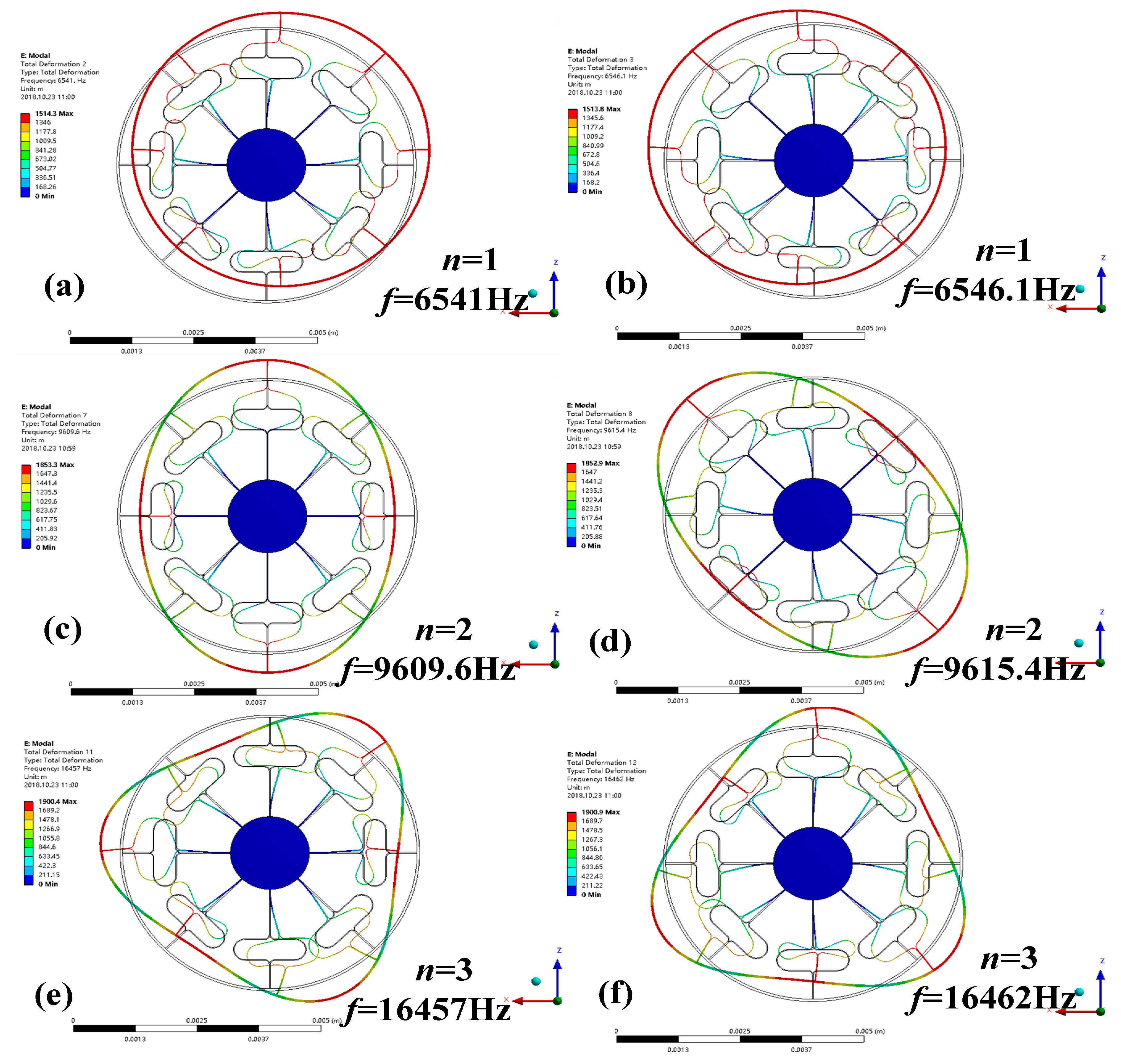
3.2.1. Mode Simulation
3.2.2. Harmonic Response Simulation
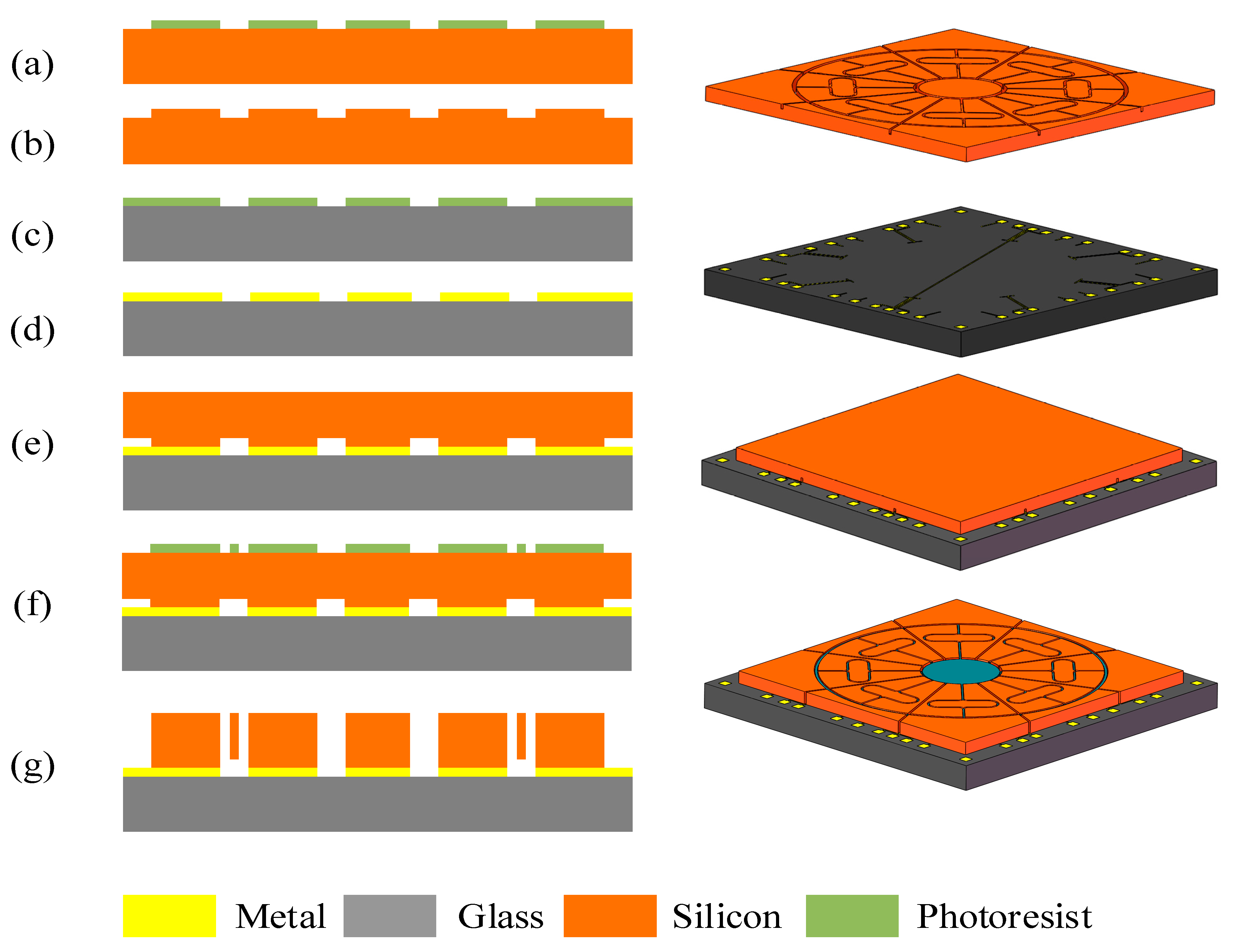
4. MEMS DUVRG Structure Fabrication
- (1)
- sputtering metal and metal patterns on top of the glass layer to form electrode leads on the glass substrate (Figure 9a–c);
- (2)
- etching the bottom surface of the silicon wafer to form supporting anchors and independent electrodes and anodic bonding between the silicon wafer and the glass layer (Figure 9d–f);
- (3)
- etching the silicon wafer by DRIE technology after anodic bonding, so that the resonant structure is released and the capacitor electrode is separated (Figure 9g,h);
- (4)
- etching glass chips to form glass caps to protect the microstructure and anodic bonding of the glass caps with silicon chips, forming a three-layer bonded gyroscopic structure (Figure 9i,k);
- (5)
- the fabrication process succeeded in fabricating a precise structure, and scanning electron microscopy (SEM) images are shown in Figure 10.
5. Experiment and Discussion
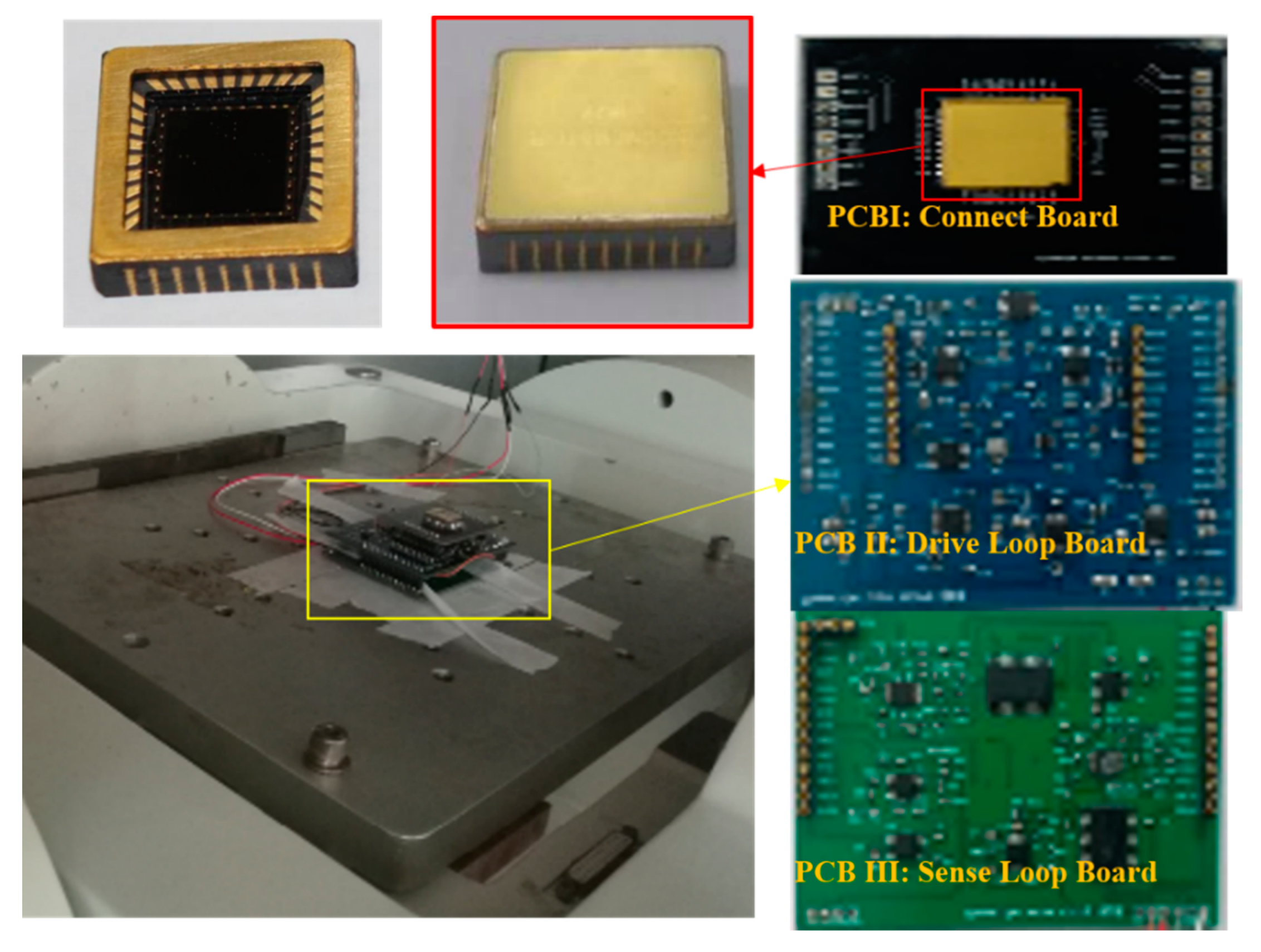
5.1. DUVRG Monitoring System
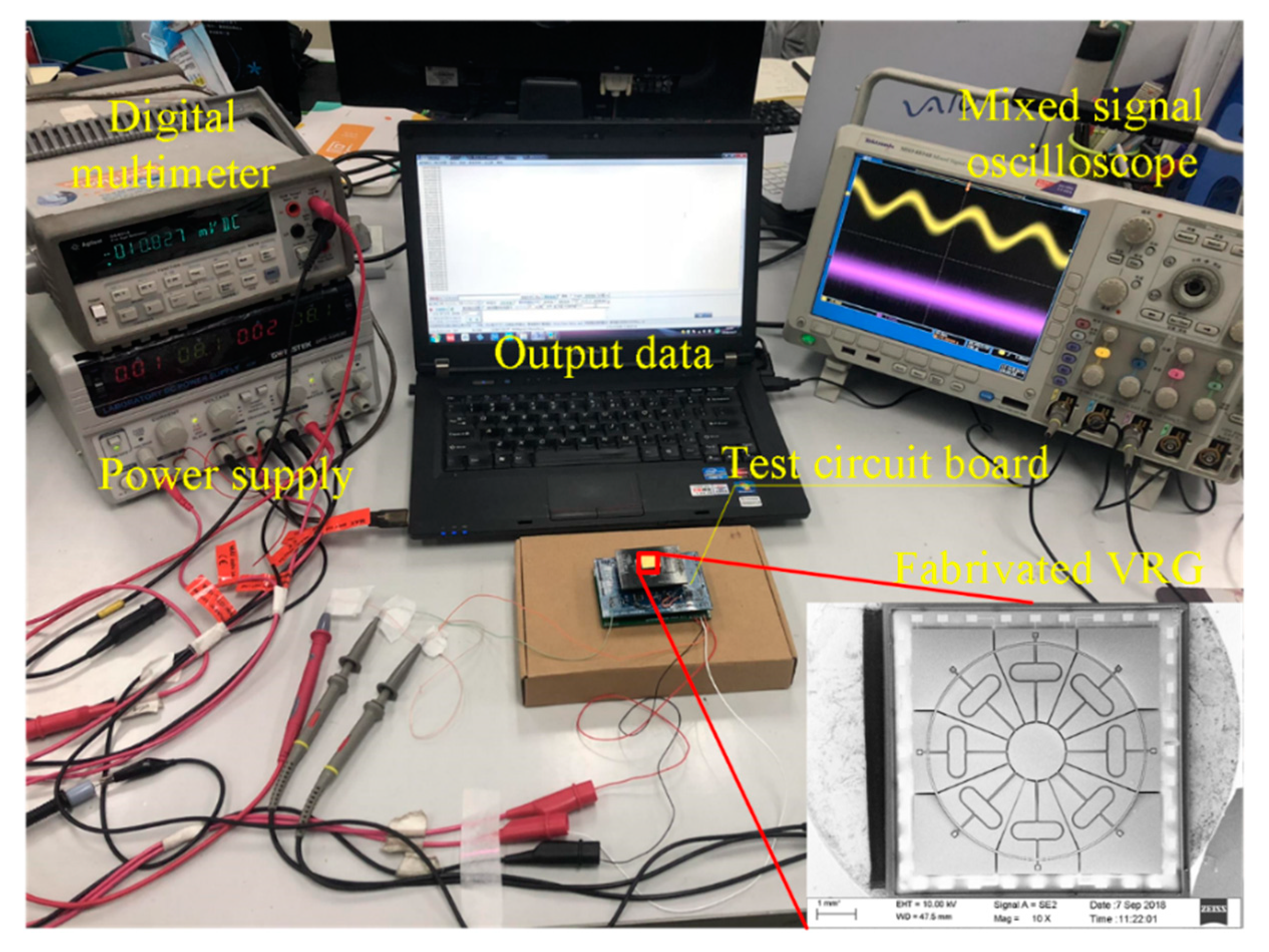
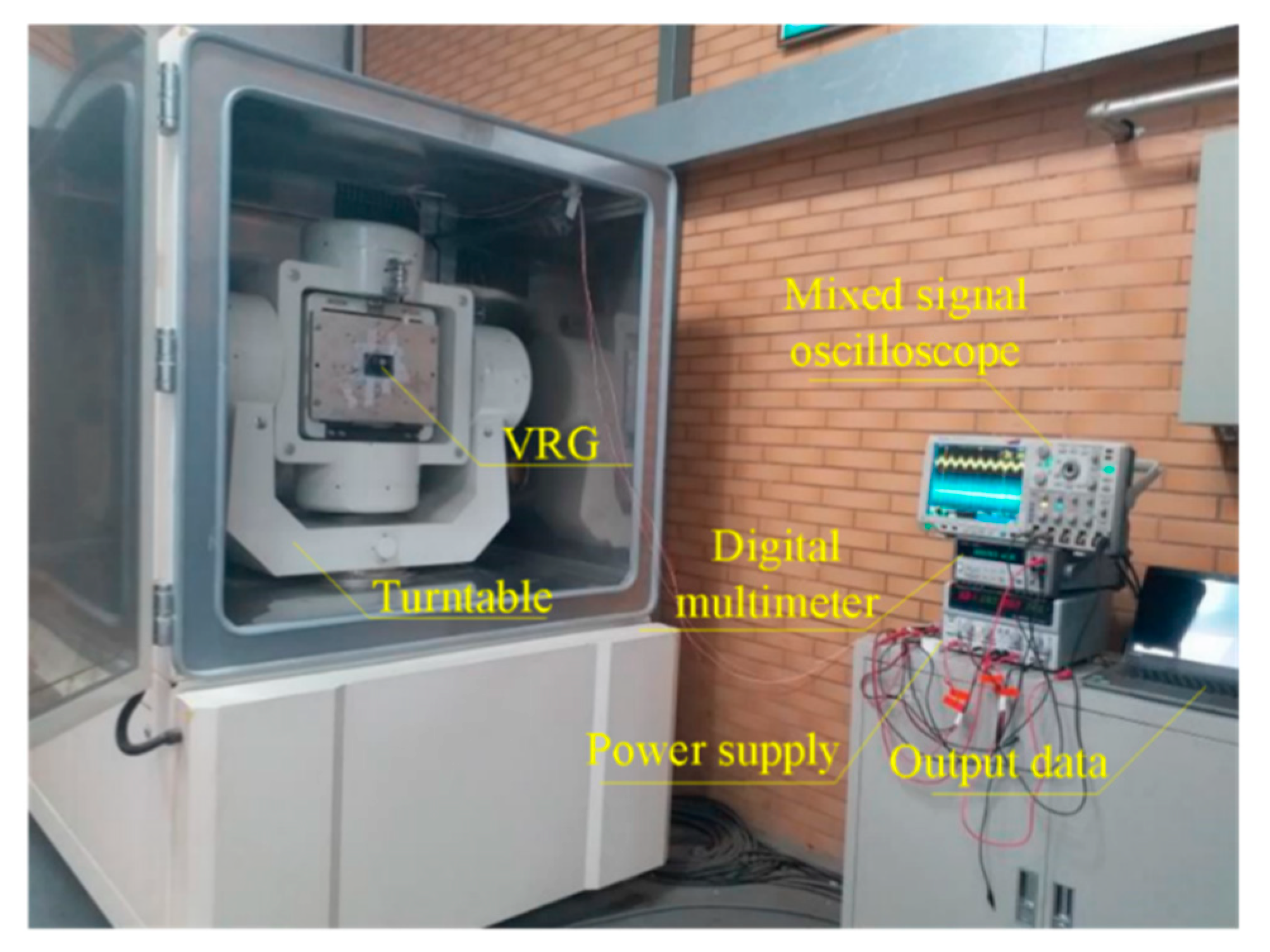
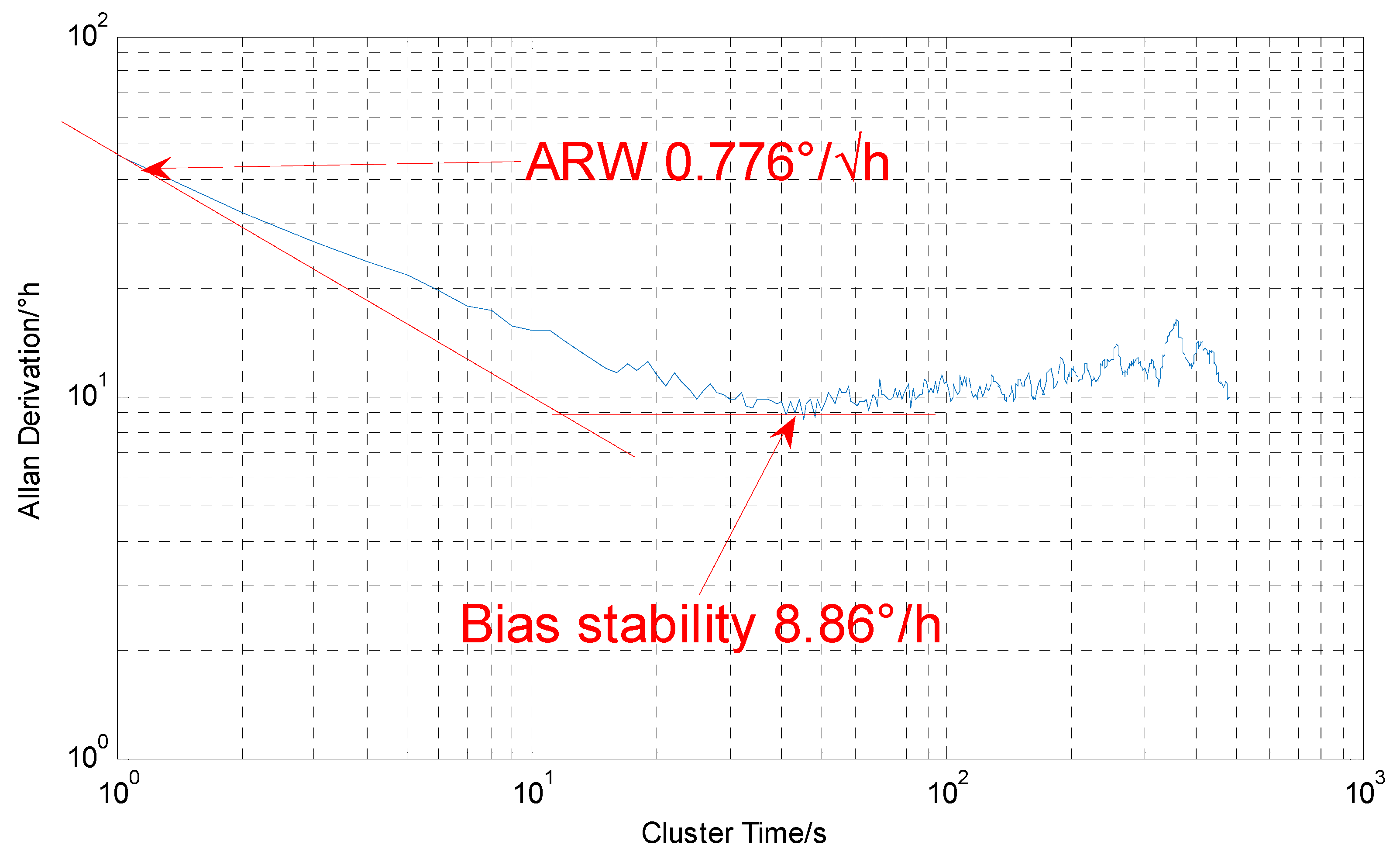
5.2. DUVRG Test Platform
6. Conclusions and Discussions
Author Contributions
Funding
Conflicts of Interest
References
- Tao, K.; Yi, H.P.; Tang, L.H.; Wu, J.; Wang, P.H.; Wang, N.; Hu, L.X.; Fu, Y.Q.; Miao, J.M.; Chang, H.L. Piezoelectric ZnO thin films for 2DOF MEMS vibrational energy harvesting. Surf. Coat. Technol. 2019, 359, 289–295. [Google Scholar] [CrossRef]
- Guo, H.; Chen, Y.; Wu, D.; Zhao, R.; Tang, J.; Ma, Z.; Xue, C.; Zhang, W.; Liu, J. Plasmon-enhanced sensitivity of spin-based sensors based on a diamond ensemble of nitrogen vacancy color centers. Opt. Lett. 2017, 42, 403–406. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wang, J.; Du, W. Research on Fault Diagnosis of Gearbox with Improved Variational Mode Decomposition. Sensors 2018, 10, 3510. [Google Scholar] [CrossRef] [PubMed]
- Xia, D.; Yu, C.; Kong, L. The development of micromachined gyroscope structure and circuitry technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Sun, C.; Wang, P.; Huang, L. Vision sensor and dual MEMS gyroscope integrated system for attitude determination on moving base. Rev. Sci. Instrum. 2018, 89, 015002. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Tian, G.; Chen, X. Enhancing INS/UWB integrated position estimation using federated EFIR filtering. IEEE Access 2018, 6, 64461–64469. [Google Scholar] [CrossRef]
- Gao, J.; Yan, G.; Shi, Y.; Cao, H.; Huang, K.; Jun, L. Optimization design of Extensor for Improving Locomotion Efficiency of Inchworm-like Capsule Robot. Sci. China Technol. Sci. 2019. [Google Scholar] [CrossRef]
- Guo, X.; Tang, J.; Li, J.; Wang, C.; Shen, C.; Liu, J. Determine turntable coordinate system considering its non-orthogonality. Rev. Sci. Instrum. 2019, in press. [Google Scholar]
- Wang, Z.; Zhou, J.; Wang, J. A novel Fault Diagnosis Method of Gearbox Based on Maximum Kurtosis Spectral Entropy Deconvolution. IEEE Access 2019. [Google Scholar] [CrossRef]
- Guo, H.; Zhu, Q.; Tang, J.; Nian, F.; Liu, W.; Zhao, R.; Du, F.; Yang, B.; Liu, J. A temperature and humidity synchronization detection method based on microwave coupled-resonator. Sens. Actuators B 2018, 261, 434–440. [Google Scholar] [CrossRef]
- Huang, H.; Chen, X.; Zhang, J. Weight self-adjustment adams implicit filtering algorithm for attitude estimation applied to underwater gliders. IEEE Access 2017, 4, 5695–5709. [Google Scholar] [CrossRef]
- Shen, Q.; Chang, H.; Wu, Y.; Xie, J. Turn-on bias behavior prediction for micromachined Coriolis vibratory gyroscopes. Measurement 2019, 131, 380–393. [Google Scholar] [CrossRef]
- Ding, X.; Zhu, K.; Li, H. A Switch-bridge Based Readout Circuit for Differential Capacitance Measurement in MEMS Resonators. IEEE Sens. J. 2017, 17, 6978–6985. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Liu, J.; Shi, Y.; Tang, J.; Shen, C. An improved interface and noise analysis of a turning fork microgyroscope structure. Mech. Syst. Signal Process. 2016, 70–71, 1208–1220. [Google Scholar] [CrossRef]
- Zotov, S.; Simon, S.; Prikhodko, I.; Trusov, A.; Shkel, A. Quality Factor Maximization Through Dynamic Balancing of Tuning Fork Resonator. IEEE Sens. J. 2014, 14, 2706–2714. [Google Scholar] [CrossRef]
- Xie, J.; Chen, L.; Xie, H.; Zhou, J.; Liu, G. The Application of Chemical Foaming Method in the Fabrication of Micro Glass Hemisphere Resonator. Micromachines 2018, 9, 42. [Google Scholar]
- Cao, H.; Li, H.; Shao, X.; Liu, Z.; Kou, Z.; Shan, Y.; Shi, Y.; Shen, C.; Liu, J. Sensing mode coupling analysis for dual-mass MEMS gyroscope and bandwidth expansion within wide-temperature range. Mech. Syst. Signal Process. 2018, 98, 448–464. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Han, Z.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; Liu, J. Pole-Zero-Temperature Compensation Circuit Design and Experiment for Dual-mass MEMS Gyroscope Bandwidth Expansion. IEEE/ASME Trans. Mechatron. 2019. [Google Scholar] [CrossRef]
- Shen, C.; Song, R.; Li, J.; Zhang, X.; Tang, J.; Shi, Y.; Liu, J.; Cao, H. Temperature drift modeling of MEMS gyroscope based on genetic-Elman neural network. Mech. Syst. Signal Process. 2016, 72–73, 897–905. [Google Scholar]
- Cao, H.; Zhang, Y.; Shen, C.; Liu, Y.; Wang, X. Temperature Energy Influence Compensation for MEMS Vibration Gyroscope Based on RBF NN-GA-KF Method. Shock Vib. 2018, 2018, 2830686. [Google Scholar] [CrossRef]
- Shen, C.; Yang, J.; Tang, J.; Liu, J.; Cao, H. Note: Parallel processing algorithm of temperature and noise error for micro-electromechanical system gyroscope based on variational mode decomposition and augmented nonlinear differentiator. Rev. Sci. Instrum. 2018, 89, 076107. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Kou, Z.; Shi, Y.; Tang, J.; Ma, Z.; Shen, C.; Liu, J. Optimization and Experimentation of Dual-Mass MEMS Gyroscope Quadrature Error Correction Methods. Sensors 2016, 16, 71. [Google Scholar] [CrossRef]
- Li, Q.; Xiao, D.; Zhou, X.; Xu, Y.; Zhuo, M.; Hou, Z.; He, K.; Zhang, Y.; Wu, X. 0.04 degree-per-hour MEMS disk resonator gyroscope with high-quality factor (510 k) and long decaying time constant (74.9 s). Microsyst. Nanoeng. 2018, 4, 32. [Google Scholar] [CrossRef]
- Mamo, Y. Fabrication of High Aspect Ratio Vibrating Cylinder Microgyroscope Structures by Use of the LIGA Process. Ph.D. Thesis, Louisiana State University, Baton Rouge, LA, USA, 2005. [Google Scholar]
- Xi, X.; Wu, X.; Wu, Y.; Zhang, Y.; Tao, Y.; Zheng, Y.; Xiao, D. Structural-Acoustic Coupling Effects on the Non-Vacuum Packaging Vibratory Cylinder Gyroscope. Sensors 2013, 13, 17176–17192. [Google Scholar] [CrossRef]
- Casinovi, G.; Norouzpour-Shirazi, A.; Dalal, M.; Farrokh, A. Gyroscope sensing and self-calibration architecture based on signal phase shift. Sens. Actuators A Phys. 2016, 241, 1–11. [Google Scholar] [CrossRef]
- Su, Z.; Fu, M.; Li, Q.; Liu, N.; Liu, H. Research on Bell-Shaped Vibratory Angular Rate Gyro’s Character of Resonator. Sensors 2013, 13, 4724–4741. [Google Scholar] [CrossRef]
- Wang, R.; Bai, B.; Feng, H.; Ren, Z.; Cao, H.; Xue, C.; Zhang, B.; Liu, J. Design and Fabrication of Micro Hemispheric Shell Resonator with Annular Electrodes. Sensors 2016, 16, 1991. [Google Scholar] [CrossRef]
- Ayazi, F.; Najafi, K. Design and fabrication of high-performance polysilicon vibrating ring gyroscope. In Proceedings of the 11th International Workshop on MICRO Electro Mechanical Systems, Heidelberg, Germany, 25–29 January 1998; pp. 621–626. [Google Scholar]
- Ayzai, F.; Najafi, K. High aspect-ratio polysilicon micromachining technology. Sens. Actuators A 2000, 87, 46–51. [Google Scholar] [CrossRef]
- Yoon, S.; Park, U.; Rhim, J.; Yang, S.S. Tactical grade MEMS vibrating ring gyroscope with high shock reliability. J. Microelectron. Eng. 2015, 142, 22–29. [Google Scholar] [CrossRef]
- Liu, J.L.; Chen, D.Y.; Wang, J.B. Fabrication and test of an electromagnetic vibrating ring gyroscope based on SOI wafer. J. Electron. 2014, 31, 168–173. [Google Scholar] [CrossRef]
- Zaman, M.F.; Sharma, A.; Ayazi, F. The Resonating Star Gyroscope: A Novel Multiple-Shell Silicon Gyroscope with Sub-5 deg/hr Allan Deviation Bias Instability. IEEE Sens. J. 2009, 9, 616–624. [Google Scholar] [CrossRef]
- Hu, Z.X.; Gallacher, B.J.; Burdess, J.S.; Fell, C.P.; Townsend, K. A parametrically amplified MEMS rate gyroscope. Sens. Actuators A Phys. 2011, 167, 249–260. [Google Scholar] [CrossRef]
- Tao, Y.; Wu, X.; Xiao, D.; Wu, Y.; Cui, H.; Xi, X.; Zhu, B. Design, analysis and experiment of a novel ring vibratory gyroscope. Sens. Actuators A 2011, 168, 286–299. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, Y.; Wu, X.; Zhang, Y.; Zheng, Y. A novel ring vibrating gyroscope based on side piezo-electrodes. J. Cent. South Univ. 2016, 23, 555–561. [Google Scholar] [CrossRef]
- Kou, Z.; Liu, J.; Cao, H.; Shi, Y.; Ren, J.; Zhang, Y. A novel MEMS S-springs vibrating ring gyroscope with atmosphere package. AIP Adv. 2017, 7, 125301. [Google Scholar] [CrossRef]
- Kou, Z.; Liu, J.; Cao, H.; Han, Z.; Sun, Y.; Shi, Y.; Ren, S.; Zhang, Y. Investigation, modeling, and experiment of an MEMS S-springs vibrating ring gyroscope. J. Micro/Nanolithogr. MEMS MOEMS 2018, 17, 015001. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Elastic Modulus (E) | 169 GPa |
| Poisson’s ratio (µ) | 0.27 |
| Density (ρ) | 2328.3 kg/m³ |
| Radius of Resonant ring (RO) | 3000 μm |
| Height of Resonant ring (h) | 150 μm |
| Width of Resonant ring (wr) | 50 μm |
| Width of U-beam (b) | 15 μm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Liu, Y.; Kou, Z.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; et al. Design, Fabrication and Experiment of Double U-Beam MEMS Vibration Ring Gyroscope. Micromachines 2019, 10, 186. https://doi.org/10.3390/mi10030186
Cao H, Liu Y, Kou Z, Zhang Y, Shao X, Gao J, Huang K, Shi Y, Tang J, Shen C, et al. Design, Fabrication and Experiment of Double U-Beam MEMS Vibration Ring Gyroscope. Micromachines. 2019; 10(3):186. https://doi.org/10.3390/mi10030186
Chicago/Turabian StyleCao, Huiliang, Yu Liu, Zhiwei Kou, Yingjie Zhang, Xingling Shao, Jinyang Gao, Kun Huang, Yunbo Shi, Jun Tang, Chong Shen, and et al. 2019. "Design, Fabrication and Experiment of Double U-Beam MEMS Vibration Ring Gyroscope" Micromachines 10, no. 3: 186. https://doi.org/10.3390/mi10030186
APA StyleCao, H., Liu, Y., Kou, Z., Zhang, Y., Shao, X., Gao, J., Huang, K., Shi, Y., Tang, J., Shen, C., & Liu, J. (2019). Design, Fabrication and Experiment of Double U-Beam MEMS Vibration Ring Gyroscope. Micromachines, 10(3), 186. https://doi.org/10.3390/mi10030186