Stability Study of an Electrothermally-Actuated MEMS Mirror with Al/SiO2 Bimorphs



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
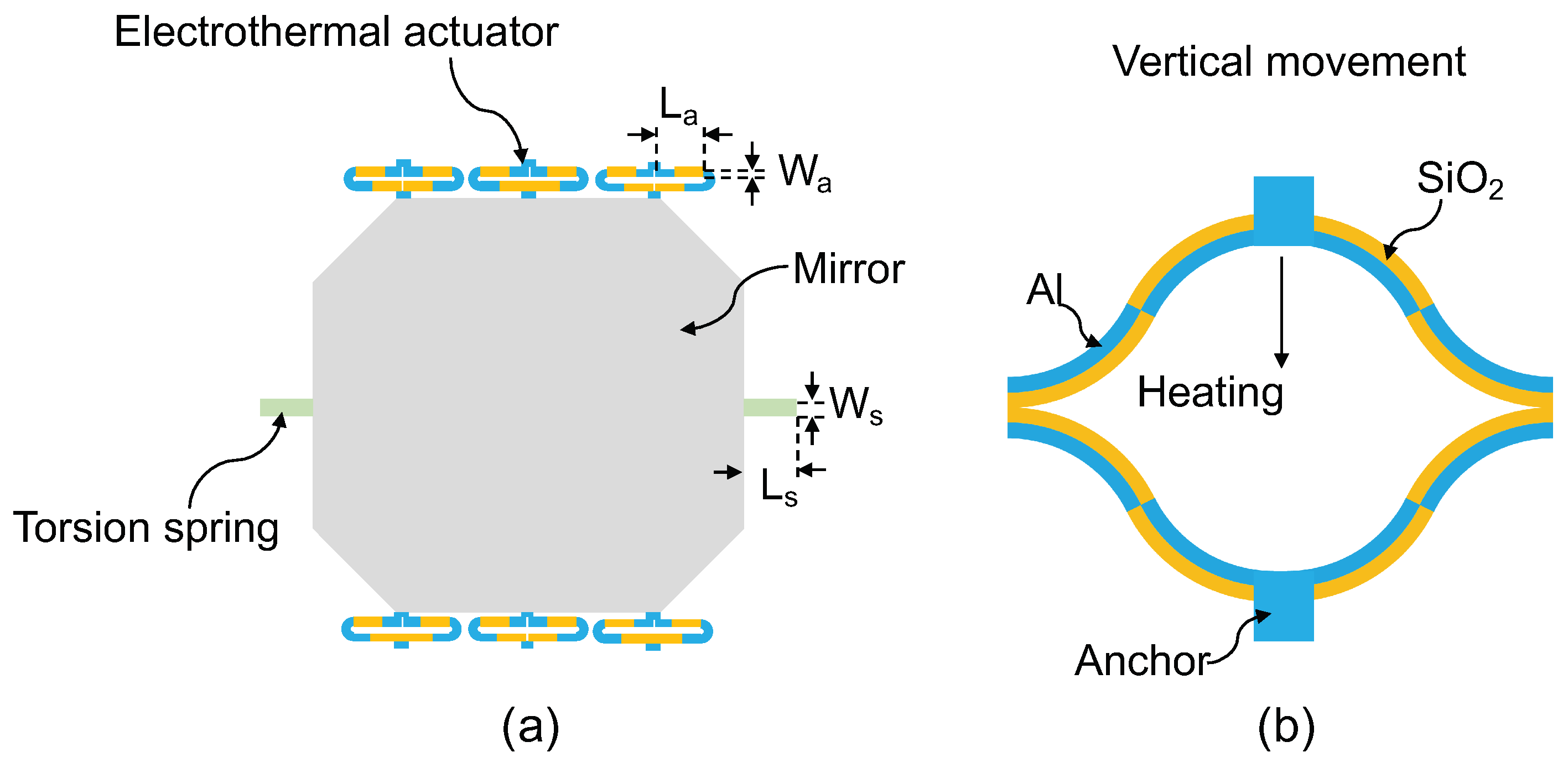
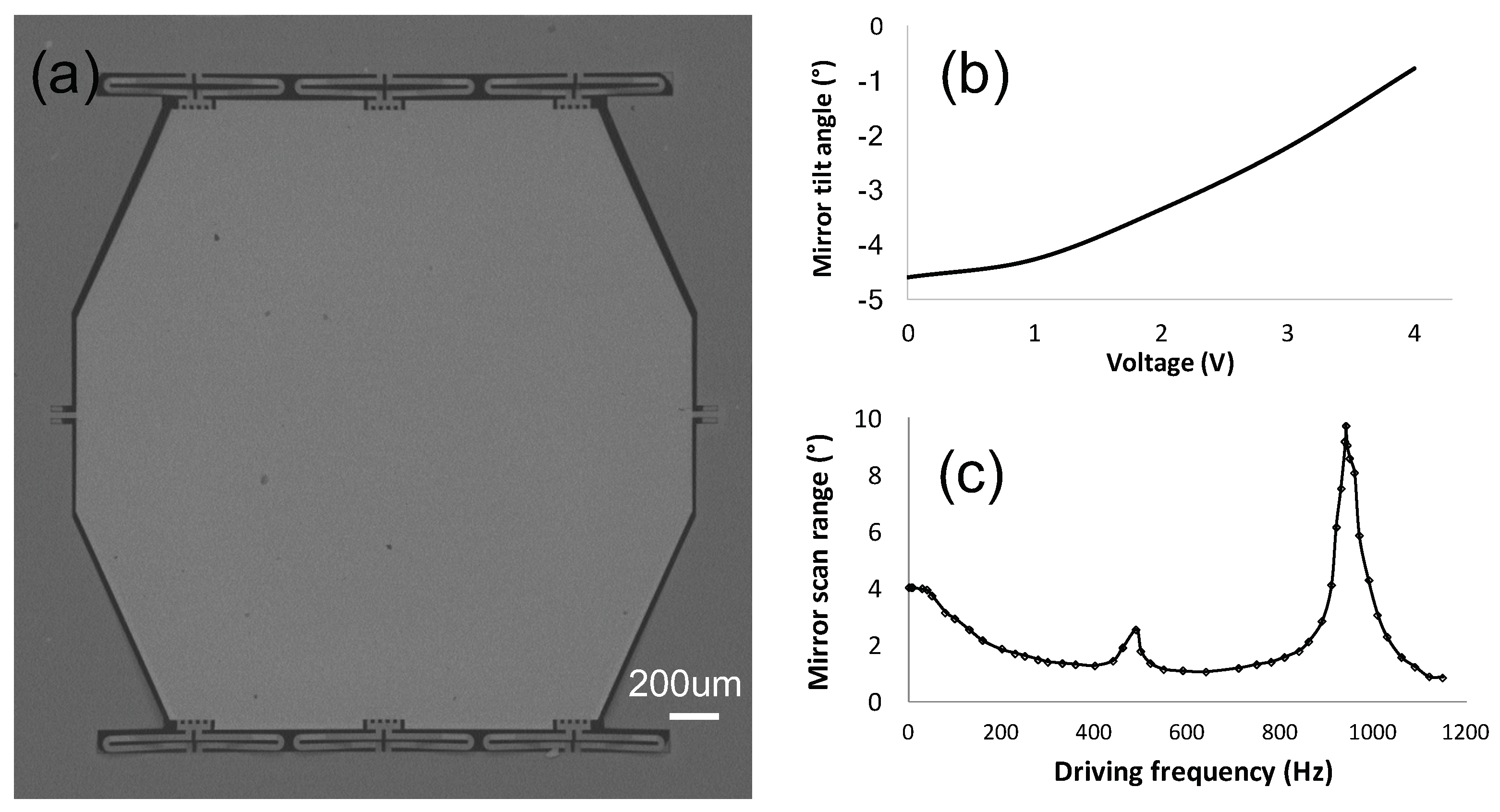
2. Electrothermal Bimorph MEMS Mirror
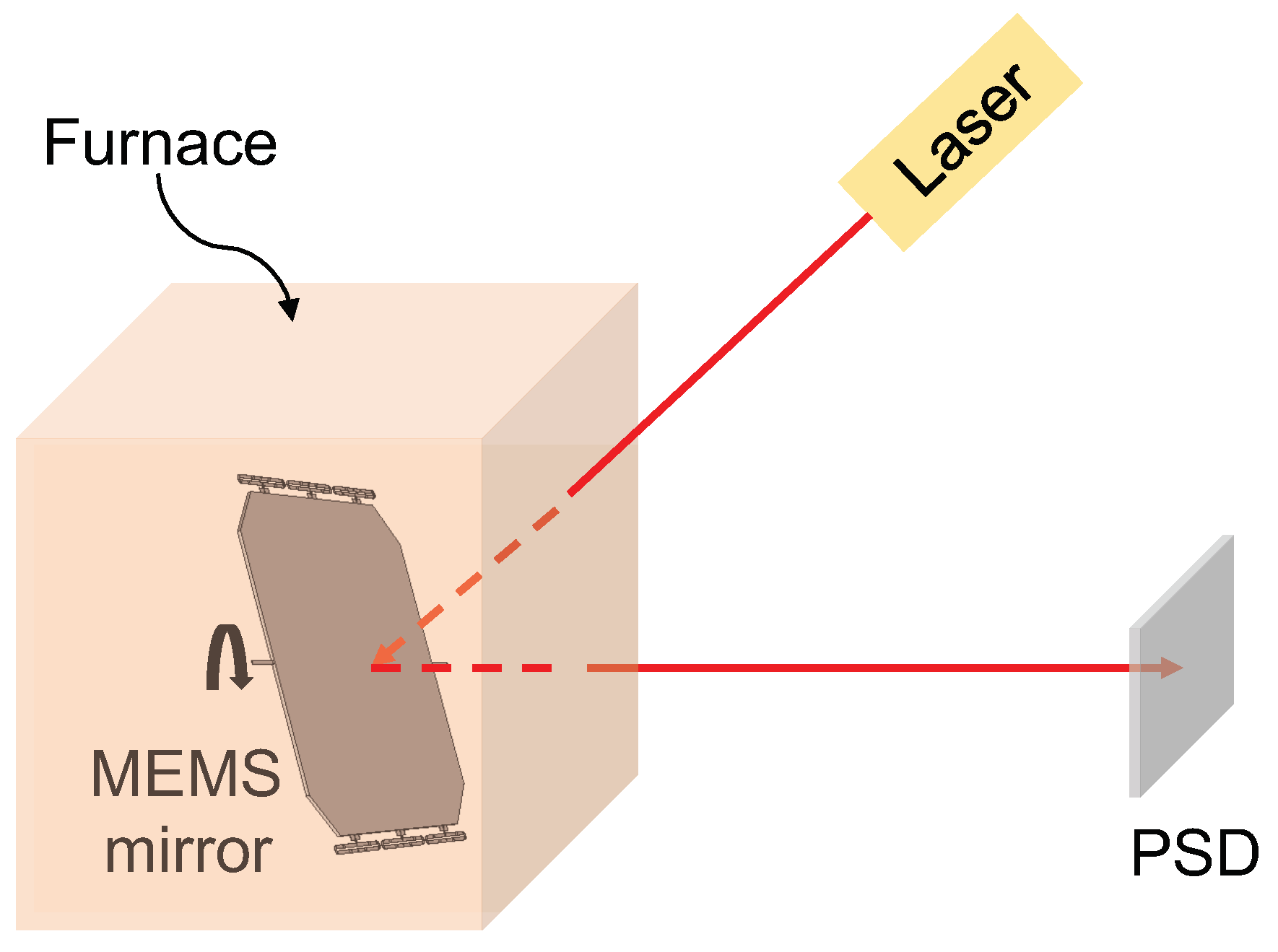
3. Stability Experiment
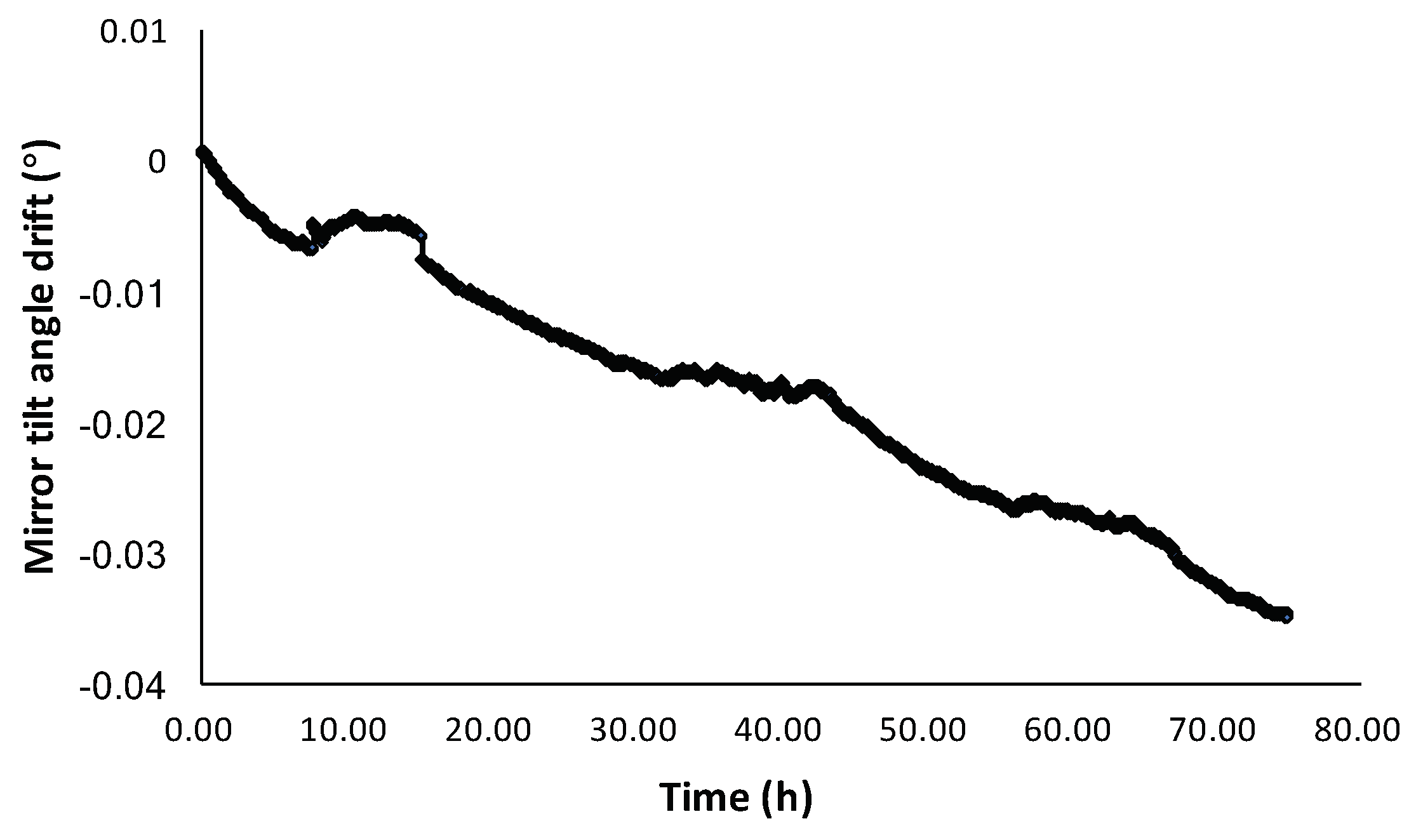
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, D.; Liu, H.; Zhang, J.; Chen, Q.; Wang, W.; Zhang, X.; Xie, H. Fourier transform infrared spectrometer based on an electrothermal MEMS mirror. Appl. Opt. 2018, 57, 5956–5961. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Xie, H. A large vertical displacement electrothermal bimorph microactuator with very small lateral shift. Sens. Actuators A Phys. 2008, 145–146, 371–379. [Google Scholar] [CrossRef]
- Park, H.C.; Zhang, X.; Yuan, W.; Zhou, L.; Xie, H.; Li, X. Ultralow-voltage electrothermal MEMS based fiber-optic scanning probe for forward-viewing endoscopic OCT. Opt. Lett. 2019, 44, 2232–2235. [Google Scholar] [CrossRef] [PubMed]
- Pal, S.; Xie, H. Repeatability study of an electrothermally actuated micromirror. In Proceedings of the 2009 IEEE International Reliability Physics Symposium, Montreal, QC, Canada, 26–30 April 2009; pp. 549–556. [Google Scholar] [CrossRef]
- Chai, J.; Jia, H.; Wang, D.; Liu, H.; Chen, Q.; Xie, H. A MEMS Based Fourier Transform Spectrometer and Its Scan Stability Study. ECS J. Solid State Sci. Technol. 2018, 7, Q3025–Q3031. [Google Scholar] [CrossRef]
- Tseng, V.F.G.; Li, J.; Zhang, X.; Ding, J.; Chen, Q.; Xie, H. An electromagnetically actuated micromirror with precise angle control for harsh environment optical switching applications. Sens. Actuators A Phys. 2014, 206, 1–9. [Google Scholar] [CrossRef]
- Van Gils, M.; Bielen, J.; McDonald, G. Evaluation of Creep in RF MEMS Devices. In Proceedings of the 2007 International Conference on Thermal, Mechanical and Multi-Physics Simulation Experiments in Microelectronics and Micro-Systems (EuroSime 2007), London, UK, 16–18 April 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, S.T.; Yang, C.H.; Faupel, F.; Ho, P.S. Stress relaxation during thermal cycling in metal/polyimide layered films. J. Appl. Phys. 1988, 64, 6690–6698. [Google Scholar] [CrossRef]
- Soma, A.; De Pasquale, G. MEMS Mechanical Fatigue: Experimental Results on Gold Microbeams. J. Microelectromech. Syst. 2009, 18, 828–835. [Google Scholar] [CrossRef]
- Van Kessel, P.F.; Hornbeck, L.J.; Meier, R.E.; Douglass, M.R. A MEMS-based projection display. Proc. IEEE 1998, 86, 1687–1704. [Google Scholar] [CrossRef]
- Fernández, R.; Bruno, G.; González-Doncel, G. Primary and secondary creep in aluminum alloys as a solid state transformation. J. Appl. Phys. 2016, 120, 085101. [Google Scholar] [CrossRef] [Green Version]
- Modlinski, R.; Witvrouw, A.; Ratchev, P.; Jourdain, A.; Simons, V.; Tilmans, H.A.C.; den Toonder, J.M.J.; Puers, R.; Wolf, I.D. Creep as a reliability problem in MEMS. Microelectron. Reliab. 2004, 44, 1733–1738. [Google Scholar] [CrossRef] [Green Version]
- Modlinski, R.; Witvrouw, A.; Ratchev, P.; Puers, R.; den Toonder, J.; Wolf, I.D. Creep characterization of Al alloy thin films for use in MEMS applications. Microelectron. Eng. 2004, 76, 272–278. [Google Scholar] [CrossRef]
- Matsunaga, T.; Sato, E. Creep mechanism in several grades of aluminum at low temperatures. J. Jpn. Inst. Light Metals 2014, 64, 42–48. [Google Scholar] [CrossRef] [Green Version]
- Ueda, S.; Kameyama, T.; Matsunaga, T.; Kitazono, K.; Sato, E. Re-examination of creep behaviour of high purity aluminium at low temperature. J. Phys. Conf. Ser. 2010, 240, 012073. [Google Scholar] [CrossRef]
- Kahl, S.; Ekström, H.E.; Mendoza, J. Tensile, Fatigue, and Creep Properties of Aluminum Heat Exchanger Tube Alloys for Temperatures from 293 K to 573 K (20 °C to 300 °C). Metall. Mater. Trans. A 2014, 45, 663–681. [Google Scholar] [CrossRef]
- De Pasquale, G.; Soma, A. MEMS Mechanical Fatigue: Effect of Mean Stress on Gold Microbeams. J. Microelectromech. Syst. 2011, 20, 1054–1063. [Google Scholar] [CrossRef]
- Scott, S.; Katz, J.; Sadeghi, F.; Peroulis, D. Highly Reliable MEMS Temperature Sensors for 275 °CApplications—Part 2: Creep and Cycling Performance. J. Microelectromech. Syst. 2013, 22, 236–243. [Google Scholar] [CrossRef]
- Wang, W.; Chen, Q.; Wang, D.; Zhou, L.; Xie, H. A bi-directional large-stroke electrothermal MEMS mirror with minimal thermal and temporal drift. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 331–334. [Google Scholar] [CrossRef]
- COMSOL Multiphysics © v.5.4. Available online: https://www.comsol.com/release/5.4 (accessed on 3 October 2018).
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Liu, Y.; Wang, D.; Liu, H.; Liu, W.; Xie, H. Stability Study of an Electrothermally-Actuated MEMS Mirror with Al/SiO2 Bimorphs. Micromachines 2019, 10, 693. https://doi.org/10.3390/mi10100693
Wang P, Liu Y, Wang D, Liu H, Liu W, Xie H. Stability Study of an Electrothermally-Actuated MEMS Mirror with Al/SiO2 Bimorphs. Micromachines. 2019; 10(10):693. https://doi.org/10.3390/mi10100693
Chicago/Turabian StyleWang, Peng, YaBing Liu, Donglin Wang, Huan Liu, Weiguo Liu, and HuiKai Xie. 2019. "Stability Study of an Electrothermally-Actuated MEMS Mirror with Al/SiO2 Bimorphs" Micromachines 10, no. 10: 693. https://doi.org/10.3390/mi10100693