Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation


Abstract
:
1. Introduction
2. Methodology
2.1. Carrier Phase Bias Estimation
2.2. TEC Calculation Procedure
2.3. TEC Modelling by TPS
3. Numerical Results and Discussion
3.1. Self-Consistency Analysis
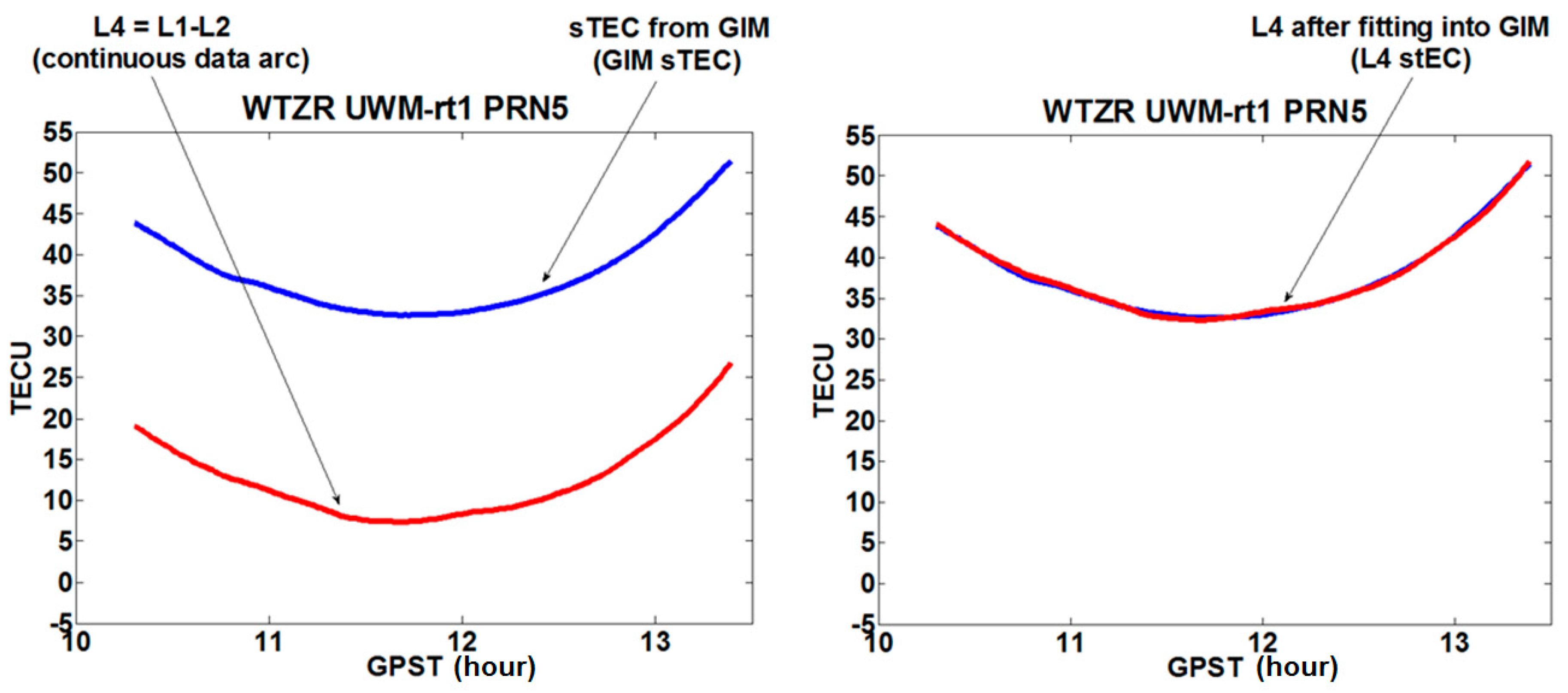
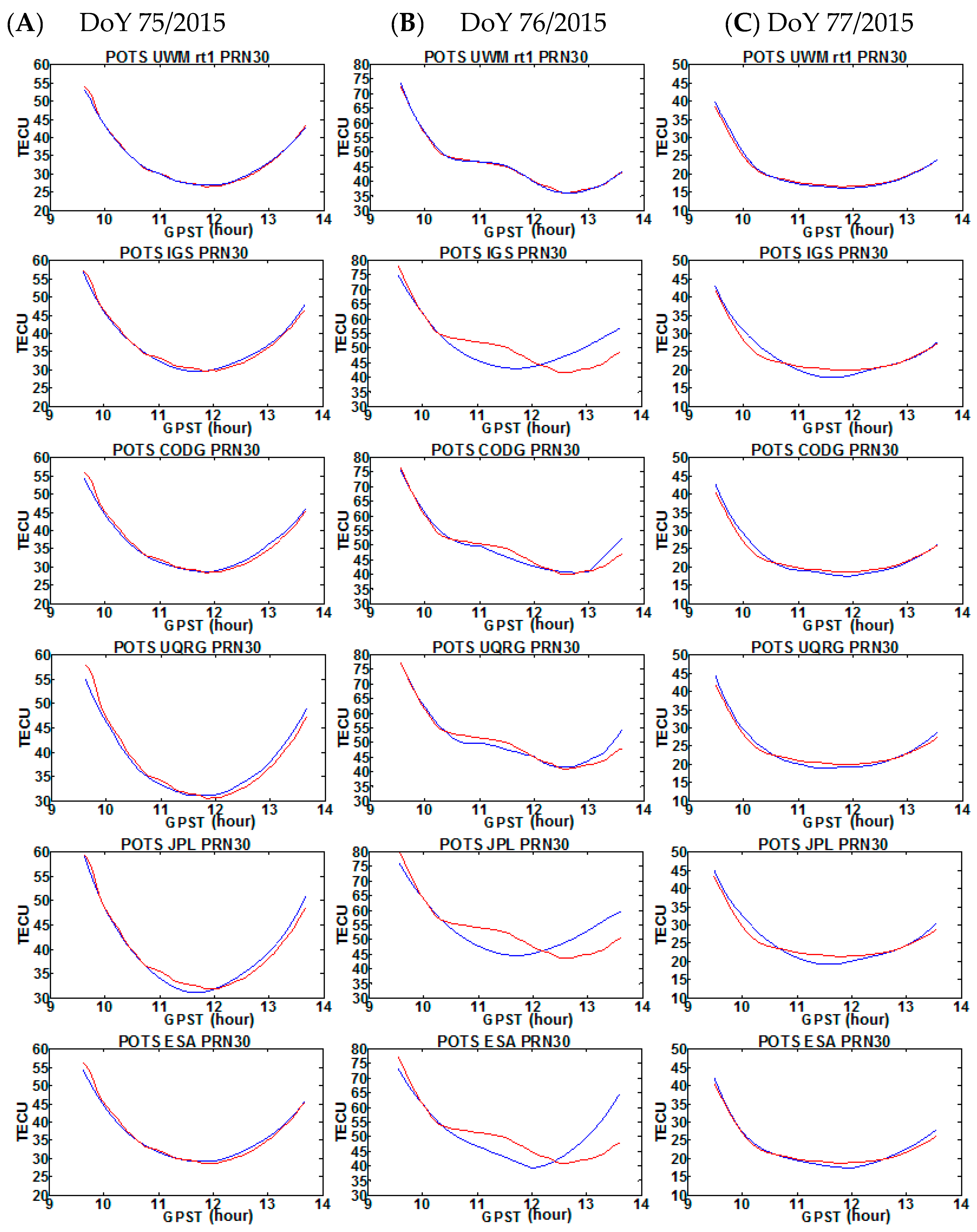
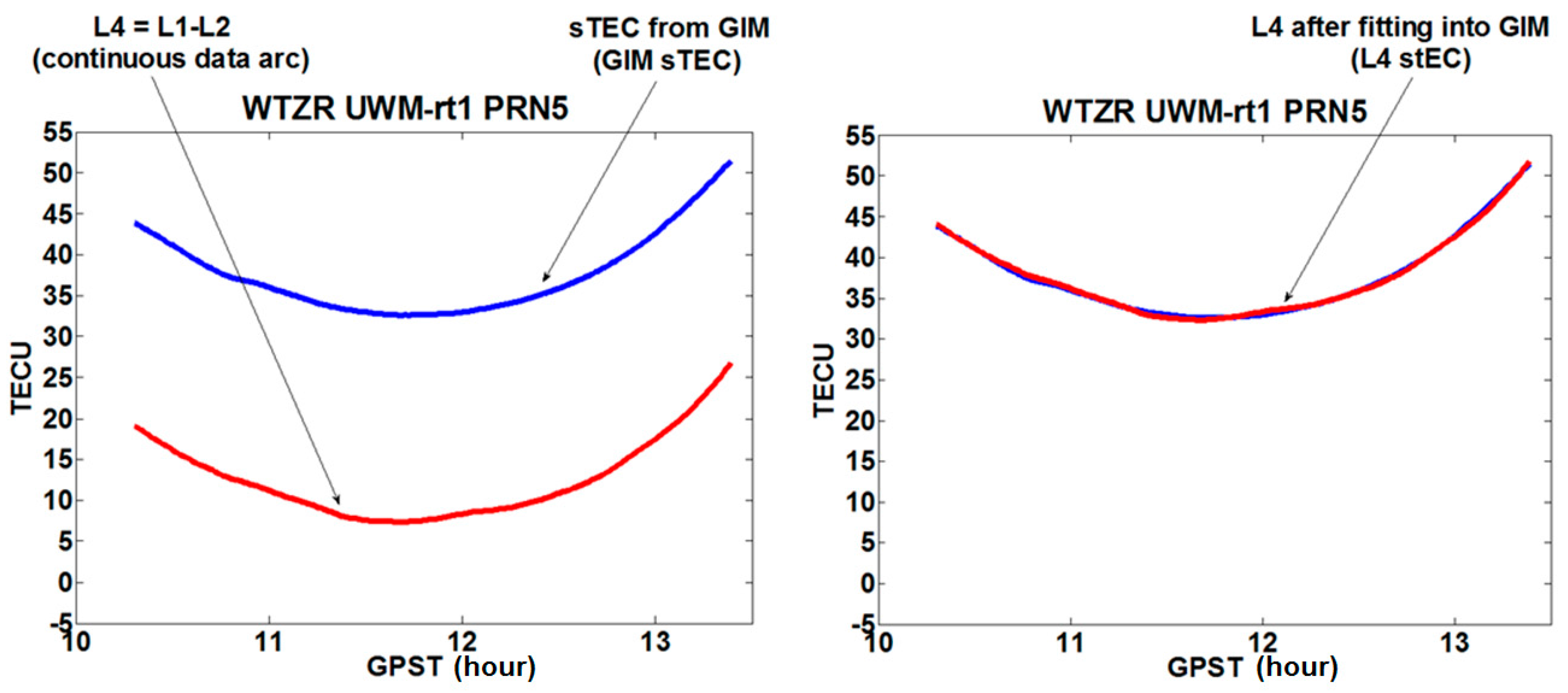
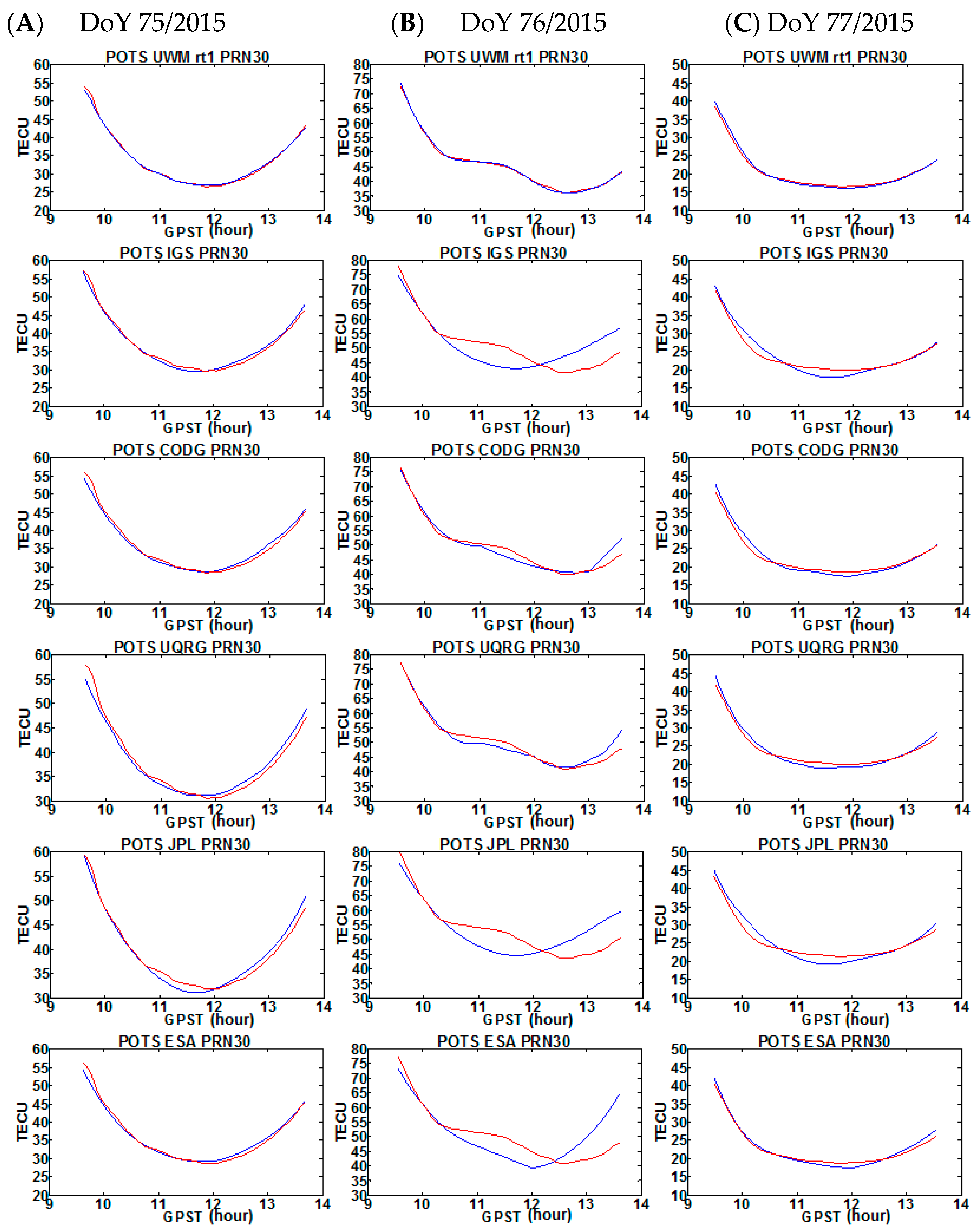
- Firstly, a geometry-free linear combination (L4) of carrier phase observations is formed for each continuous data arc (red line, Figure 3 left panel);
- next, sTEC for the same satellite arc extracted from a tested model (GIM_sTEC) is calculated (blue line, Figure 3 left panel);
- then, carrier phase bias is estimated by fitting carrier phase data (L4) into GIM_sTEC, resulting in calibrated sTEC (L4_sTEC) (red line, Figure 3 right panel).
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alizadeh, M.M.; Schuh, H.; Schmidt, M. Ray tracing technique for global 3-D modeling of ionospheric electron density using GNSS measurements. Radio Sci. 2015, 50, 539–553. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; J. Wiley and Sons: Hoboken, NJ, USA, 2015; pp. 496–509. [Google Scholar]
- Hu, G.; Abbey, D.A.; Castleden, N.; Featherstone, W.E.; Earls, C.; Ovstedal, O.; Weihing, D. An approach for instantaneous ambiguity resolution for medium- to long-range multiple reference station networks. GPS Solut. 2005, 9, 1–11. [Google Scholar] [CrossRef]
- Wielgosz, P. Quality assessment of GPS rapid static positioning with weighted ionospheric parameters in generalized least squares. GPS Solut. 2011, 15, 89–99. [Google Scholar] [CrossRef]
- Khodabandeh, A.; Teunissen, P.J.G. Array-aided multifrequency GNSS ionospheric sensing: Estimability and precision analysis. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5895–5913. [Google Scholar] [CrossRef]
- Kashani, I.; Wielgosz, P.; Grejner-Brzezinska, D.A. The impact of the ionospheric correction latency on long baseline instantaneous kinematic GPS positioning. Surv. Rev. 2007, 39, 238–251. [Google Scholar] [CrossRef]
- Schunk, R.W.; Scherliess, L.; Sojka, J.J.; Thompson, D. Global Assimilation of Ionospheric Measurements (GAIM). Radio Sci. 2004, 39, RS1S02. [Google Scholar] [CrossRef]
- Bilitza, D.; McKinnell, L.A.; Reinisch, B.; Fuller-Rowell, T. The international reference ionosphere today and in the future. J. Geodesy 2011, 85, 909–920. [Google Scholar] [CrossRef]
- Nava, B.; Radicella, S.M.; Azpilicueta, F. Data ingestion into NeQuick 2. Radio Sci. 2011, 46, RS0D17. [Google Scholar] [CrossRef]
- Gao, Y.; Liao, X.; Liu, Z.Z. Ionosphere modeling using carrier smoothed ionosphere observations from a regional GPS network. Geomatica 2002, 56, 97–106. [Google Scholar]
- Stanislawska, I.; Juchnikowski, G.; Cander, L.R.; Ciraolo, L.; Bradley, P.A.; Zbyszynski, Z.; Swiatek, A. The kriging method of TEC instantaneous mapping. Adv. Space Res. 2002, 29, 945–948. [Google Scholar] [CrossRef]
- Wielgosz, P.; Grejner-Brzezinska, D.A.; Kashani, I. Regional ionosphere mapping with kriging and multiquadric methods. J. Glob. Position. Syst. 2003, 2, 48–55. [Google Scholar] [CrossRef]
- Orùs, R.; Hernández-Pajares, M.; Juan, J.M.; Sanz, J. Improvement of global ionospheric VTEC maps by using kriging interpolation technique. J. Atmos. Sol. Terr. Phys. 2005, 67, 1598–1609. [Google Scholar] [CrossRef]
- Krypiak-Gregorczyk, A.; Wielgosz, P.; Jarmołowski, W. A new TEC interpolation method based on the least squares collocation for high accuracy regional ionospheric maps. Meas. Sci. Technol. 2017, 28, 045801. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph.D. Thesis, Astronomical Institute, University of Berne, Bern, Switzerland, 1999. [Google Scholar]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The IGS VTEC Maps: A Reliable Source of Ionospheric Information since 1998. J. Geodesy 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Schmidt, M.; Dettmering, D.; Moßmer, M.; Wang, Y.; Zhang, J. Comparison of spherical harmonic and B spline models for the vertical total electron content. Radio Sci. 2011, 46, 1–8. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; González-Casado, G. A World-Wide Ionospheric Model for Fast Precise Point Positioning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4596–4604. [Google Scholar] [CrossRef]
- Zus, F.; Deng, Z.; Heise, S.; Wickert, J. Ionospheric mapping functions based on electron density fields. GPS Solut. 2017, 21, 873–885. [Google Scholar] [CrossRef]
- Hernandez-Pajares, M.; Roma-Dollase, D.; Krankowski, A.; Garcia-Rigo, A.; Orús-Perez, R. Methodology and consistency of slant and vertical assessments for ionospheric electron content models. J. Geodesy 2017, 91, 1–10. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Aragon-Angel, A.; Garcia-Rigo, A.; Salazar, D.; Escudero, M. The ionosphere: Effects, GPS modeling and the benefits for space geodetic techniques. J. Geodesy 2011, 85, 887–907. [Google Scholar] [CrossRef]
- Feltens, J. The International GPS Service (IGS) ionosphere working group. Adv. Space Res. 2003, 31, 205–214. [Google Scholar] [CrossRef]
- Feltens, J. Development of a new three-dimensional mathematical ionosphere model at European space agency/European space operations centre. Space Weather. 2007, 5, 1–17. [Google Scholar] [CrossRef]
- Mannucci, A.; Wilson, B.; Yuan, D.; Ho, C.; Lindqwister, U.; Runge, T. Global mapping technique for gps-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J. New approaches in global ionospheric determination using ground gps data. J. Atmos. Sol. Terr. Phys. 1999, 61, 1237–1247. [Google Scholar] [CrossRef]
- Brunini, C.; Meza, A.; Azpilicueta, F.; Zele, M.A.V. A new ionosphere monitoring technology based on GPS. Astrophys. Space Sci. 2004, 290, 415–429. [Google Scholar] [CrossRef]
- Bosy, J.; Graszka, W.; Leonczyk, M. ASG-EUPOS—A multifunctional precise satellite positioning system in Poland. Eur. J. Navig. 2007, 5, 2–6. [Google Scholar]
- Krypiak-Gregorczyk, A.; Wielgosz, P.; Krukowska, M. A new ionosphere monitoring service over the ASG-EUPOS network stations. In Proceedings of the 9th International Conference Environmental Engineering (9th ICEE), Vilnius, Lithuania, 22–23 May 2014. [Google Scholar]
- Krypiak-Gregorczyk, A.; Wielgosz, P. Carrier phase bias estimation of geometry-free linear combination of GNSS signals. GPS Solut. 2017. under review. [Google Scholar]
- Lin, L. Remote sensing of ionosphere using GPS measurements. In Proceedings of the 22nd Asian Conference on Remote Sensing, Singapore, 5–9 November 2001. [Google Scholar]
- Shagimuratov, I.; Baran, L.W.; Wielgosz, P.; Yakimova, G.A. The structure of mid- and high-latitude ionosphere during September 1999 storm event obtained from GPS observations. Ann. Geophys. 2002, 20, 665–671. [Google Scholar] [CrossRef]
- Wielgosz, P.; Krypiak-Gregorczyk, A.; Borkowski, A. Regional Ionosphere Modeling Based on Multi-GNSS Data and TPS Interpolation. In Proceedings of the Baltic Geodetic Congress (BGC Geomatics), Gdansk, Poland, 22–25 June 2017; pp. 287–291. [Google Scholar]
- Duchon, J. Interpolation des fonctions de deux varianles suivant le principle de la flexion des plaques minces. R.A.I.R.O. Anal. Numer. 1976, 10, 5–12. [Google Scholar]
- Borkowski, A.; Keller, W. Global and local methods for tracking the intersection curve between two surfaces. J. Geodesy 2005, 79, 1–10. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
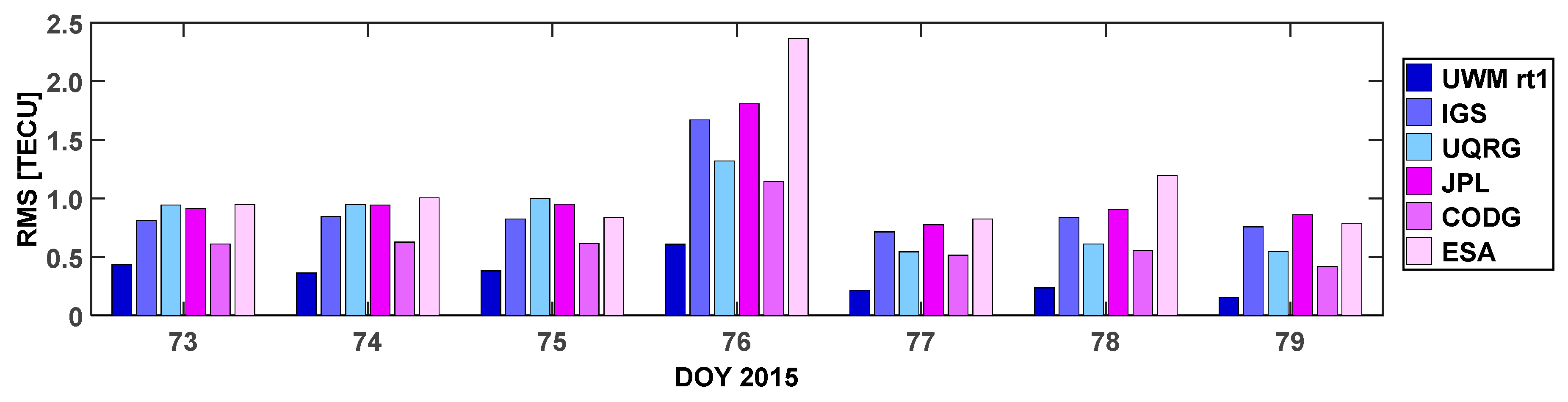
| DOY | UWM-rt1 | IGS | UQRG | JPL | CODG | ESA |
|---|---|---|---|---|---|---|
| 73 | 0.44 | 0.81 | 0.94 | 0.91 | 0.61 | 0.95 |
| 74 | 0.36 | 0.85 | 0.95 | 0.94 | 0.63 | 1.00 |
| 75 | 0.38 | 0.83 | 1.00 | 0.95 | 0.62 | 0.84 |
| 76 | 0.61 | 1.67 | 1.32 | 1.81 | 1.14 | 2.36 |
| 77 | 0.22 | 0.71 | 0.54 | 0.78 | 0.52 | 0.82 |
| 78 | 0.24 | 0.84 | 0.61 | 0.91 | 0.56 | 1.20 |
| 79 | 0.15 | 0.76 | 0.55 | 0.86 | 0.42 | 0.79 |
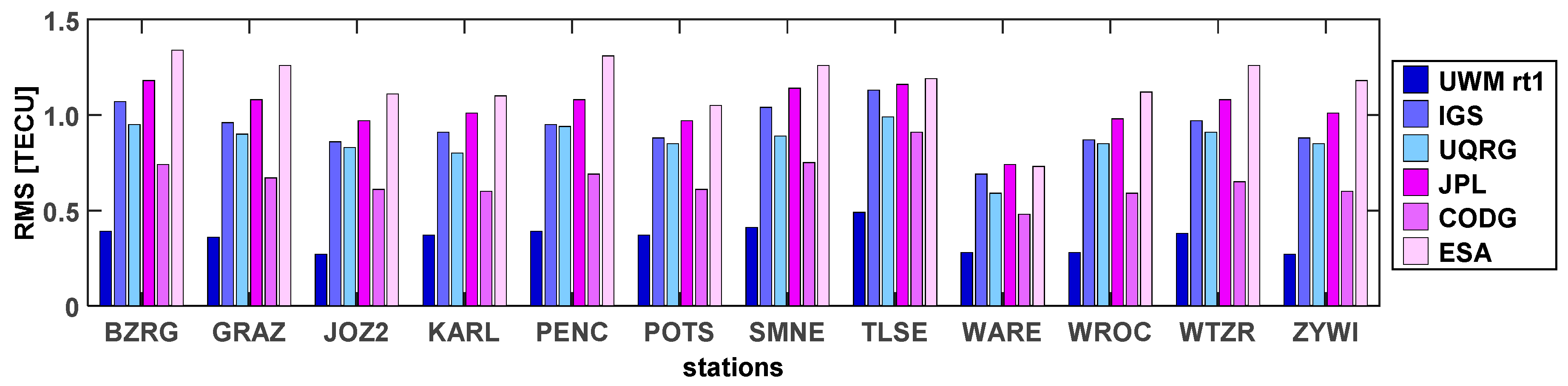
| UWM-rt1 | IGS | UQRG | JPL | CODG | ESA |
|---|---|---|---|---|---|
| 0.34 | 0.92 | 0.84 | 1.02 | 0.64 | 1.14 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krypiak-Gregorczyk, A.; Wielgosz, P.; Borkowski, A. Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation. Remote Sens. 2017, 9, 1221. https://doi.org/10.3390/rs9121221
Krypiak-Gregorczyk A, Wielgosz P, Borkowski A. Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation. Remote Sensing. 2017; 9(12):1221. https://doi.org/10.3390/rs9121221
Chicago/Turabian StyleKrypiak-Gregorczyk, Anna, Pawel Wielgosz, and Andrzej Borkowski. 2017. "Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation" Remote Sensing 9, no. 12: 1221. https://doi.org/10.3390/rs9121221
APA StyleKrypiak-Gregorczyk, A., Wielgosz, P., & Borkowski, A. (2017). Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation. Remote Sensing, 9(12), 1221. https://doi.org/10.3390/rs9121221