
A Hybrid Spatio-Temporal Graph Attention (ST D-GAT Framework) for Imputing Missing SBAS-InSAR Deformation Values to Strengthen Landslide Monitoring


 and
and 
Abstract

1. Introduction
2. Study Area and Datasets
2.1. Study Area
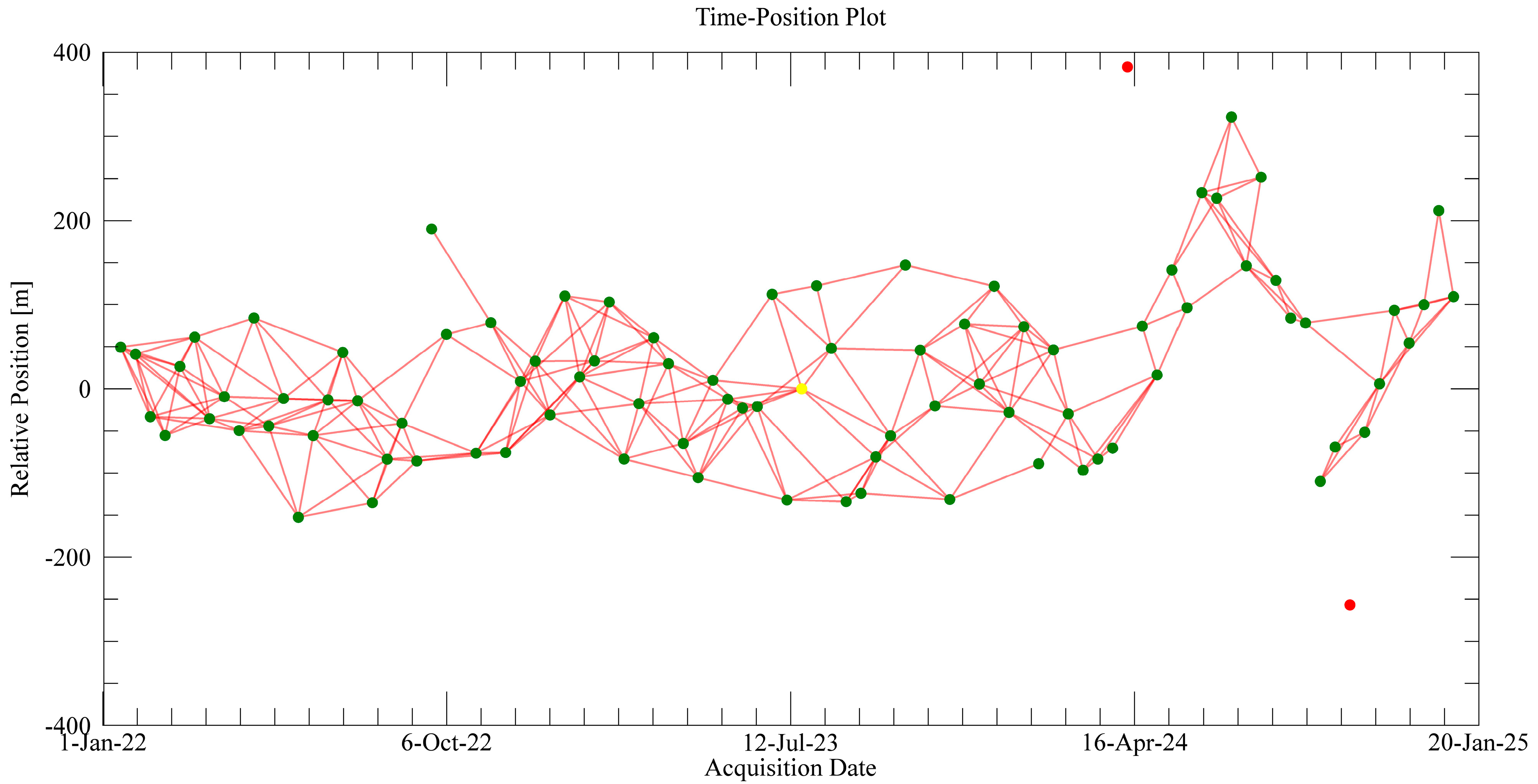
2.2. SAR Acquisitions
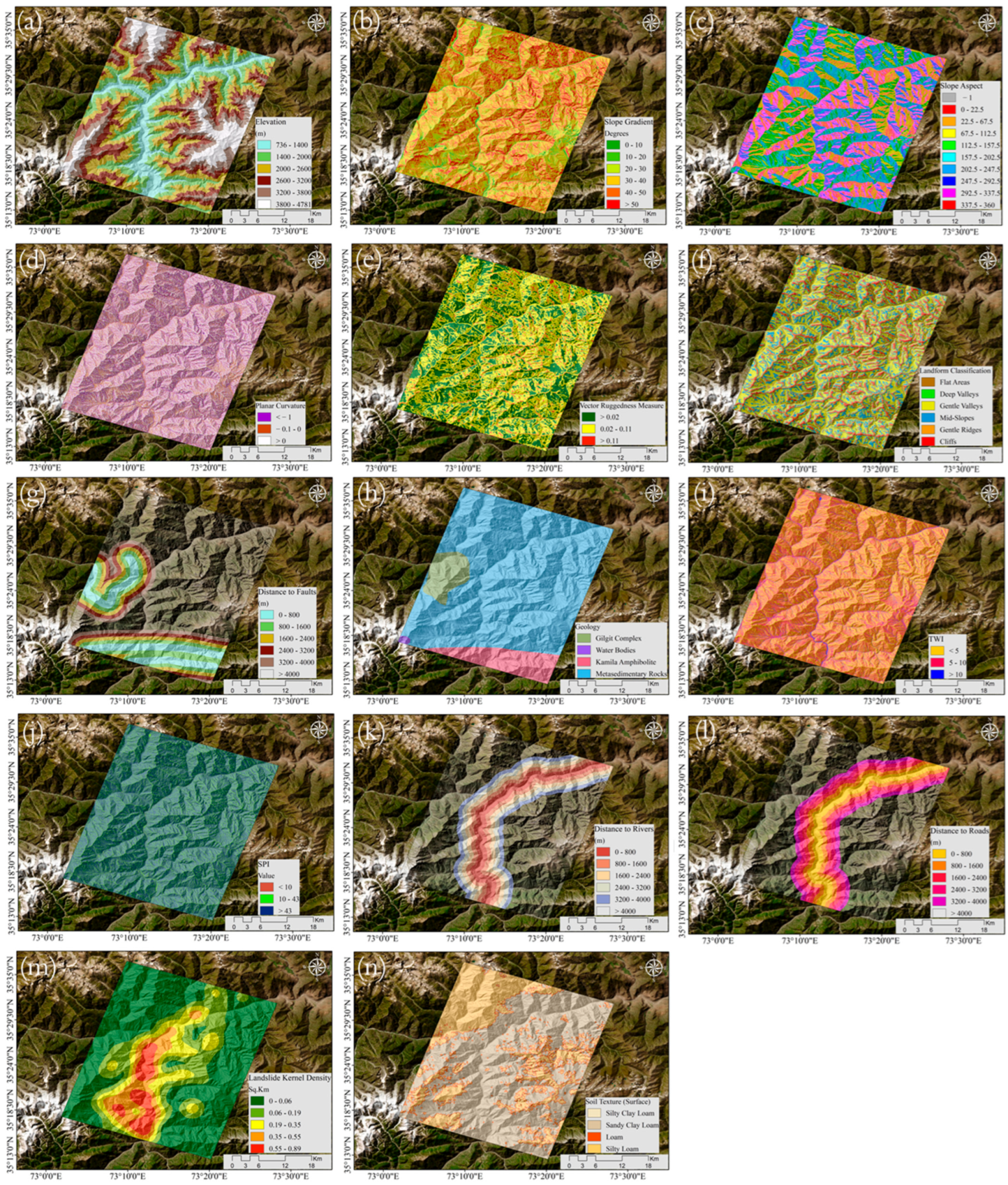
2.3. Static and Dynamic Covariates for InSAR Deformation
3. Methodological Framework
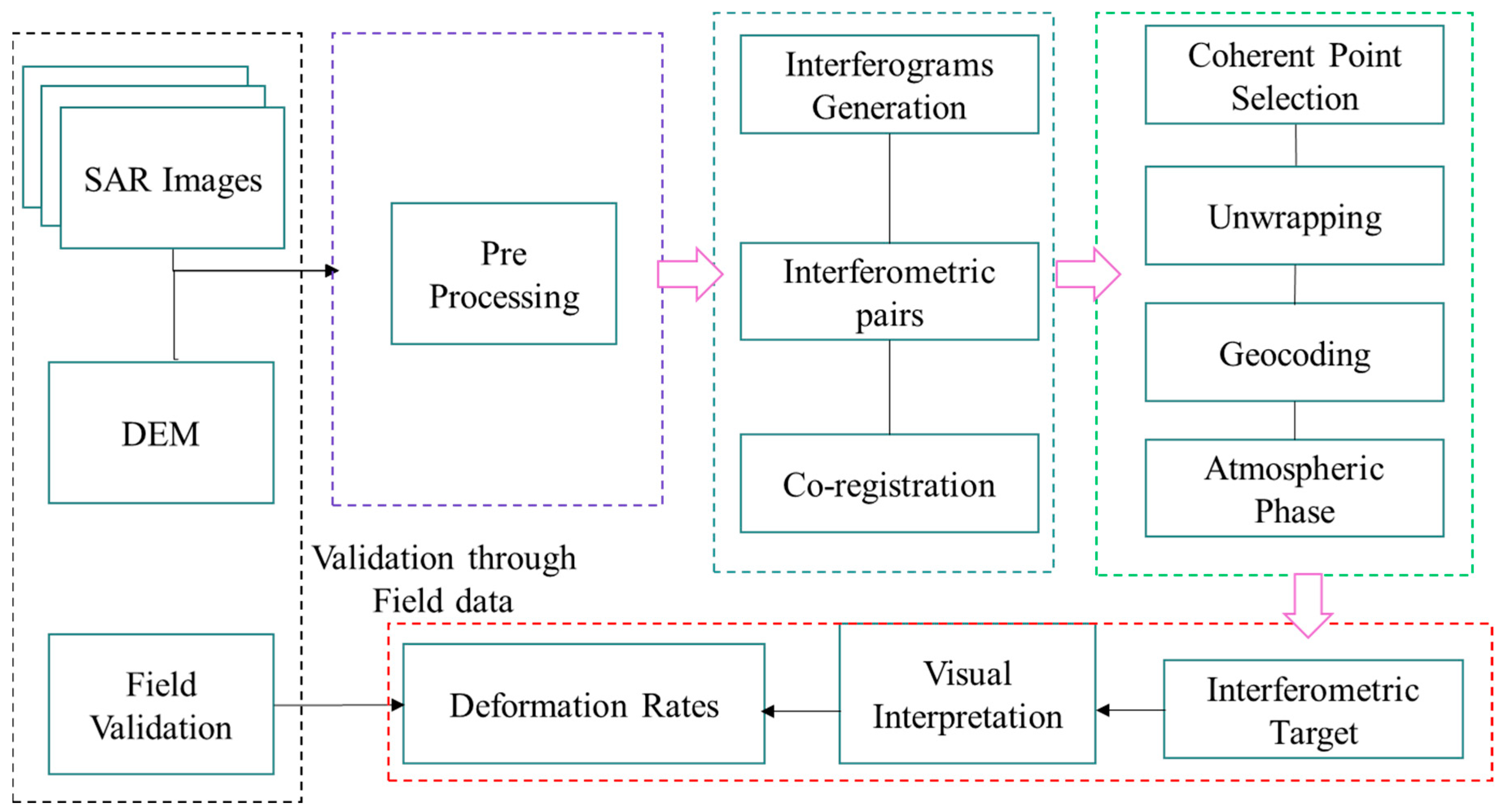
3.1. SBAS-InSAR Processing
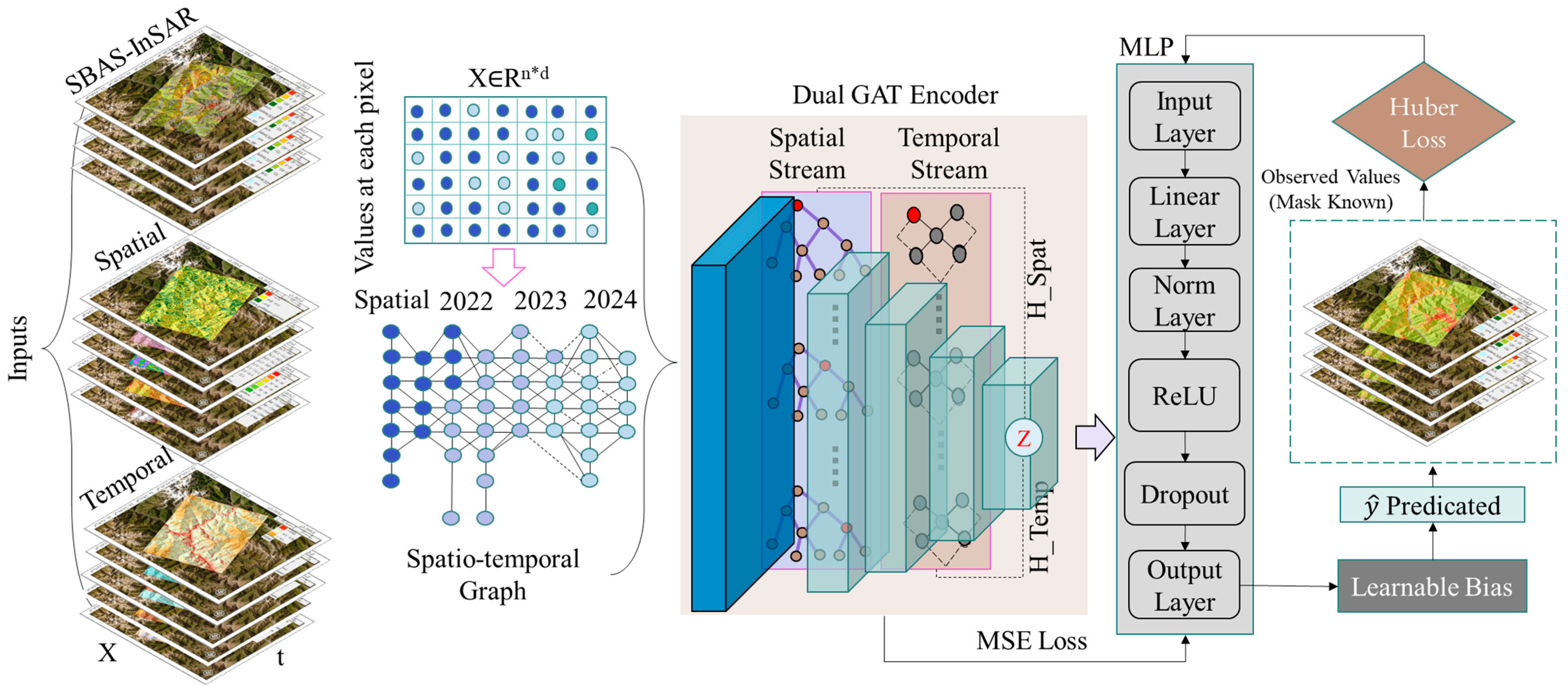
3.2. Development of the Proposed Model
3.2.1. Data Collection and Processing
3.2.2. Spatial–Temporal Graph Construction
3.2.3. Spatial–Temporal Dual GAT InSAR Deformation Framework (ST D-GAT Framework)
3.3. Evaluation and Validation of the Model
4. Results
4.1. SBAS-InSAR Analysis
4.2. ST D-GAT InSAR Imputation Performance
4.3. Model Validation and Performance Assessment
4.4. Baseline Models
4.5. Ablation Analysis
5. Discussion
6. Conclusions
- By incorporating 14 spatial and 10 temporal predictors (encompassing topographic, geological, hydrological, climatic, anthropogenic, hazard, vegetation, and soil factors) with SBAS-InSAR results, the model identifies both long-term susceptibility and short-term triggers, enabling it to impute realistic deformation even where InSAR measurements are unavailable.
- The framework successfully filled voids in geologically critical areas, such as the Uchar debris-flow site and Kaigha slope, ensuring temporal continuity and preserving observed deformation trends. This is essential for early warning systems and hazard assessment in areas where a high number of InSAR pixels are missing.
- The model achieved an overall R2 of 0.907 and a Pearson’s ρ of 0.947, outperforming classical and machine learning baselines across both spatial and temporal maps. Its ability to reconstruct nearly half of the missing data demonstrates strong generalization under extreme decorrelation.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Varnes, D.J. Slope movement types and processes. Spec. Rep. 1978, 176, e33. [Google Scholar]
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes classification of landslide types, an update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Cruden, D.M.; Varnes, D.J. Landslide types and processes. Landslides Investig. Mitig. Spec. Rep. 1996, 247, 36–75. [Google Scholar]
- Paronuzzi, P.; Rigo, E.; Bolla, A. Influence of filling–drawdown cycles of the Vajont reservoir on Mt. Toc slope stability. Geomorphology 2013, 191, 75–93. [Google Scholar] [CrossRef]
- Xu, Z.; Song, S.; Wu, F.; Cao, C.; Ma, M.; Wang, S. Research on the spatiotemporal evolution of deformation and seismic dynamic response characteristics of high-steep loess slope on the northeast edge of the Qinghai-Tibet Plateau. Bull. Eng. Geol. Environ. 2025, 84, 21. [Google Scholar] [CrossRef]
- Li, L.; Yao, X.; Wen, B.; Zhou, Z.; Li, R. The long-term failure processes of a large reactivated landslide in the Xiluodu reservoir area based on InSAR technology. Front. Earth Sci. 2023, 10, 1055890. [Google Scholar] [CrossRef]
- Liu, M.; Yang, Z.; Xi, W.; Guo, J.; Yang, H. InSAR-based method for deformation monitoring of landslide source area in Baihetan reservoir, China. Front. Earth Sci. 2023, 11, 1253272. [Google Scholar] [CrossRef]
- Tang, H.; Wasowski, J.; Juang, C.H. Geohazards in the three Gorges Reservoir Area, China–Lessons learned from decades of research. Eng. Geol. 2019, 261, 105267. [Google Scholar] [CrossRef]
- Wang, Y.; Dong, J.; Zhang, L.; Deng, S.; Zhang, G.; Liao, M.; Gong, J. Automatic detection and update of landslide inventory before and after impoundments at the Lianghekou reservoir using Sentinel-1 InSAR. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103224. [Google Scholar] [CrossRef]
- Siddique, A.; Tan, Z.; Tan, N.; Ahmad, H.; Li, J.; Liu, J.; Khurram, S.H.; Jiang, Y.; Zeng, N. Remote Sensing and Numerical Simulation for Slope Stability in Open-Pit Mining: Case Study of Sijiaying Iron Ore Mine, China. Geotech. Geol. Eng. 2025, 43, 290. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E. A small-baseline approach for investigating deformations on full-resolution differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, L.; Fang, Z.; Oguchi, T.; Merghadi, A.; Fu, Z.; Dong, A.; Dou, J. Interferometric synthetic aperture Radar (InSAR)-based absence sampling for machine-learning-based landslide susceptibility mapping: The Three Gorges Reservoir area, China. Remote Sens. 2024, 16, 2394. [Google Scholar] [CrossRef]
- Mondini, A.C.; Guzzetti, F.; Chang, K.-T.; Monserrat, O.; Martha, T.R.; Manconi, A. Landslide failures detection and mapping using Synthetic Aperture Radar: Past, present and future. Earth-Sci. Rev. 2021, 216, 103574. [Google Scholar] [CrossRef]
- Dai, M.; Li, H.; Long, B.; Wang, X. Quantitative identification of landslide hazard in mountainous open-pit mining areas combined with ascending and descending orbit InSAR technology. Landslides 2024, 21, 2975–2991. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, M.; Ma, J.; Xing, G.; Feng, G.; An, Q. InSAR-based landslide detection method with the assistance of C-index. Landslides 2023, 20, 2709–2723. [Google Scholar] [CrossRef]
- Dong, J.; Niu, R.; Li, B.; Xu, H.; Wang, S. Potential landslides identification based on temporal and spatial filtering of SBAS-InSAR results. Geomat. Nat. Hazards Risk 2023, 14, 52–75. [Google Scholar] [CrossRef]
- Torre, D.; Galve, J.P.; Reyes-Carmona, C.; Alfonso-Jorde, D.; Ballesteros, D.; Menichetti, M.; Piacentini, D.; Troiani, F.; Azañón, J.M. Geomorphological assessment as basic complement of InSAR analysis for landslide processes understanding. Landslides 2024, 21, 1273–1292. [Google Scholar] [CrossRef]
- Wang, M.; Fang, Z.; Li, X.; Kang, J.; Wei, Y.; Wang, S.; Zheng, Y.; Zhang, X.; Liu, T. Research on the Prediction Method of 3D Surface Deformation in Filling Mining Based on InSAR-IPIM. Energy Sci. Eng. 2025, 13, 2401–2414. [Google Scholar] [CrossRef]
- Zhao, Z.; Wu, Z.; Zheng, Y.; Ma, P. Recurrent neural networks for atmospheric noise removal from InSAR time series with missing values. ISPRS J. Photogramm. Remote Sens. 2021, 180, 227–237. [Google Scholar] [CrossRef]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Sun, X.; Zimmer, A.; Mukherjee, S.; Kottayil, N.K.; Ghuman, P.; Cheng, I. DeepInSAR—A deep learning framework for SAR interferometric phase restoration and coherence estimation. Remote Sens. 2020, 12, 2340. [Google Scholar] [CrossRef]
- Mukherjee, S.; Zimmer, A.; Sun, X.; Ghuman, P.; Cheng, I. An unsupervised generative neural approach for InSAR phase filtering and coherence estimation. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1971–1975. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Ai, C.; Wu, Y.; Ren, X. NBDNet: A Self-Supervised CNN-Based Method for InSAR Phase and Coherence Estimation. Remote Sens. 2025, 17, 1181. [Google Scholar] [CrossRef]
- Sibler, P.; Wang, Y.; Auer, S.; Ali, S.M.; Zhu, X.X. Generative Adversarial Networks for Synthesizing InSAR Patches. In Proceedings of the EUSAR 2021, 13th European Conference on Synthetic Aperture Radar, Online, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Wang, Y.; Li, S.; Li, B. Deformation prediction of cihaxia landslide using InSAR and deep learning. Water 2022, 14, 3990. [Google Scholar] [CrossRef]
- Tian, F.; Zhang, W.; Zhu, H.-H.; Wang, C.; Chang, F.-N.; Li, H.-Z.; Tan, D.-Y. Multi-temporal InSAR-based landslide dynamic susceptibility mapping of Fengjie County, Three Gorges Reservoir Area, China. J. Rock Mech. Geotech. Eng. 2025, in press. [Google Scholar] [CrossRef]
- Dun, J.; Feng, W.; Yi, X.; Zhang, G.; Wu, M. Detection and mapping of active landslides before impoundment in the Baihetan Reservoir Area (China) based on the time-series InSAR method. Remote Sens. 2021, 13, 3213. [Google Scholar] [CrossRef]
- Zhengrong, Y.; Wenfei, X.; Zhengtao, S.; Bo, X.; Dingyi, Z. Deformation analysis in the bank slopes in the reservoir area of Baihetan Hydropower Station based on SBAS-InSAR technology. Chin. J. Geol. Hazard Control 2022, 33, 83–92. [Google Scholar]
- Chang, F.; Dong, S.; Yin, H.; Ye, X.; Wu, Z.; Zhang, W.; Zhu, H. 3D displacement time series prediction of a north-facing reservoir landslide powered by InSAR and machine learning. J. Rock Mech. Geotech. Eng. 2025, 17, 4445–4461. [Google Scholar] [CrossRef]
- Aswathi, J.; Kumar, R.B.; Oommen, T.; Bouali, E.; Sajinkumar, K. InSAR as a tool for monitoring hydropower projects: A review. Energy Geosci. 2022, 3, 160–171. [Google Scholar] [CrossRef]
- Miller, L.; Pelletier, C.; Webb, G.I. Deep learning for satellite image time-series analysis: A review. IEEE Geosci. Remote Sens. Mag. 2024, 12, 81–124. [Google Scholar] [CrossRef]
- Ahmad, H.; Ningsheng, C.; Rahman, M.; Islam, M.M.; Pourghasemi, H.R.; Hussain, S.F.; Habumugisha, J.M.; Liu, E.; Zheng, H.; Ni, H. Geohazards susceptibility assessment along the upper indus basin using four machine learning and statistical models. ISPRS Int. J. Geo-Inf. 2021, 10, 315. [Google Scholar] [CrossRef]
- Ahmed, M.F.; Sher, F.; Mehmood, E. Evaluation of landslide hazards potential at Dasu dam site and its reservoir area. Environ. Earth Sci. 2023, 82, 183. [Google Scholar] [CrossRef]
- Ahmad, H.; Alam, M.; Yinghua, Z.; Najeh, T.; Gamil, Y.; Hameed, S. Landslide risk assessment integrating susceptibility, hazard, and vulnerability analysis in Northern Pakistan. Discov. Appl. Sci. 2024, 6, 7. [Google Scholar] [CrossRef]
- Siddique, A.; Qulin, T.; Ahmad, H.; Rasool, U.; Tan, Z.; Sajjad, M.M.; Iftikharf, F.; Shrahili, M.; ur Rahman, S. Landslide risk assessment on the China–Pakistan Economic Corridor (CPEC): A comparative study of quantitative and machine learning approaches. Sādhanā 2025, 50, 95. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 2. [Google Scholar]
- Sajjad, M.M.; Wang, J.; Ge, D.; Khan, R.; Ahmed, I.; Zada, K. Assessing the potential landslide risk identification in the northern section of CPEC route Pakistan based on Multi-Temporal InSAR approaches. J. Mt. Sci. 2024, 21, 4131–4148. [Google Scholar] [CrossRef]
- Hussain, S.; Pan, B.; Hussain, W.; Sajjad, M.M.; Ali, M.; Afzal, Z.; Abdullah-Al-Wadud, M.; Tariq, A. Integrated PSInSAR and SBAS-InSAR analysis for landslide detection and monitoring. Phys. Chem. Earth Parts A/B/C 2025, 139, 103956. [Google Scholar] [CrossRef]
- Chang, F.; Dong, S.; Yin, H.; Wu, Z. Using the SBAS InSAR technique to monitor surface deformation in the Kuqa fold-thrust belt, Tarim Basin, NW China. J. Asian Earth Sci. 2022, 231, 105212. [Google Scholar] [CrossRef]
- Zhong, F.; Gao, F.; Liu, T.; Wang, J.; Sun, J.; Zhou, H. Scattering characteristics guided network for isar space target component segmentation. IEEE Geosci. Remote Sens. Lett. 2025, 22, 4009505. [Google Scholar] [CrossRef]
- Yang, H.; Liu, Y.; Han, Q.; Xu, L.; Zhang, T.; Wang, Z.; Yan, A.; Zhao, S.; Han, J.; Wang, Y. Improved Landslide Deformation Prediction Using Convolutional Neural Network–Gated Recurrent Unit and Spatial–Temporal Data. Remote Sens. 2025, 17, 727. [Google Scholar] [CrossRef]
- Shu, C.; Meng, Z.; Yang, Y.; Wang, Y.; Liu, S.; Zhang, X.; Zhang, Y. Deep learning-based InSAR time-series deformation prediction in coal mine areas. Geo-Spat. Inf. Sci. 2025, 1–23. [Google Scholar] [CrossRef]
- Ahmad, H.; Yinghua, Z.; Khan, M.; Alam, M.; Hameed, S.; Basnet, P.M.S.; Siddique, A.; Ullah, Z. Morphometric assessment and soil erosion susceptibility maping using ensemble extreme gradient boosting (XGBoost) algorithm: A study for Hunza-Nagar catchment, Northern Pakistan. Environ. Earth Sci. 2024, 83, 605. [Google Scholar] [CrossRef]
- Nie, W.; Tian, C.; Song, D.; Liu, X.; Wang, E. Disaster process and multisource information monitoring and warning method for rainfall-triggered landslide: A case study in the southeastern coastal area of China. Nat. Hazards 2025, 121, 2535–2564. [Google Scholar] [CrossRef]
- Gariano, S.L.; Guzzetti, F. Landslides in a changing climate. Earth-Sci. Rev. 2016, 162, 227–252. [Google Scholar] [CrossRef]
- Sujatha, E.R.; Sudharsan, J. Landslide Susceptibility Mapping Methods—A Review. In Landslide: Susceptibility, Risk Assessment and Sustainability: Application of Geostatistical and Geospatial Modeling; Springer: Cham, Switzerland, 2024; pp. 87–102. [Google Scholar]
- Iverson, R.M. Landslide triggering by rain infiltration. Water Resour. Res. 2000, 36, 1897–1910. [Google Scholar] [CrossRef]
- Bogaard, T.A.; Greco, R. Landslide hydrology: From hydrology to pore pressure. Wiley Interdiscip. Rev. Water 2016, 3, 439–459. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Cigna, F.; Tapete, D. Present-day land subsidence rates, surface faulting hazard and risk in Mexico City with 2014–2020 Sentinel-1 IW InSAR. Remote Sens. Environ. 2021, 253, 112161. [Google Scholar] [CrossRef]
- Guo, J.; Xi, W.; Yang, Z.; Shi, Z.; Huang, G.; Yang, Z.; Yang, D. Landslide hazard susceptibility evaluation based on SBAS-InSAR technology and SSA-BP neural network algorithm: A case study of Baihetan Reservoir Area. J. Mt. Sci. 2024, 21, 952–972. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Maps/Outputs | RMSE | Bias | ρ | R2 |
|---|---|---|---|---|---|
| ST-GAT | Overall | 9.263 | — | 0.9474 | 0.907 |
| Spatial | 12.066 | 0.059 | 0.951 | 0.914 | |
| 2022 | 5.782 | –0.151 | 0.887 | 0.807 | |
| 2023 | 8.027 | –0.088 | 0.935 | 0.894 | |
| 2024 | 9.990 | –0.047 | 0.942 | 0.897 |
| Method | Maps/Outputs | RMSE | ρ | R2 |
|---|---|---|---|---|
| MLP Regressor | Overall | 14.626 | 0.865 | 0.743 |
| Simple NN | Overall | 15.595 | 0.502 | 0.735 |
| IDW (K = 8) | Overall | 20.020 | 0.733 | 0.519 |
| KNN Regressor | Overall | 16.543 | 0.819 | 0.672 |
| Random Forest | Overall | 12.753 | 0.897 | 0.805 |
| XGBoost | Overall | 14.544 | 0.866 | 0.746 |
| Method | Maps/Outputs | RMSE | Bias | ρ | R2 |
|---|---|---|---|---|---|
| MLP Regressor | Spatial | 19.989 | 0.324 | 0.863 | 0.738 |
| 2022 | 8.301 | 0.098 | 0.771 | 0.561 | |
| 2023 | 12.448 | 0.064 | 0.838 | 0.697 | |
| 2024 | 15.240 | –0.056 | 0.862 | 0.736 | |
| Simple NN | Spatial | 21.885 | 0.406 | 0.830 | 0.725 |
| 2022 | 10.079 | 0.011 | 0.728 | 0.490 | |
| 2023 | 13.267 | 0.050 | 0.818 | 0.609 | |
| 2024 | 16.801 | 0.081 | 0.797 | 0.704 | |
| IDW (K = 8) | Spatial | 26.685 | 16.714 | 0.911 | 0.533 |
| 2022 | 20.658 | –3.308 | 0.793 | –1.719 | |
| 2023 | 16.814 | –11.818 | 0.884 | 0.446 | |
| 2024 | 13.479 | 0.171 | 0.903 | 0.794 | |
| KNN Regressor | Spatial | 22.939 | 3.238 | 0.813 | 0.655 |
| 2022 | 8.838 | –0.505 | 0.733 | 0.502 | |
| 2023 | 13.596 | –1.770 | 0.803 | 0.638 | |
| 2024 | 17.476 | –1.199 | 0.810 | 0.653 | |
| Random Forest | Spatial | 18.234 | 0.051 | 0.884 | 0.782 |
| 2022 | 5.937 | –0.171 | 0.881 | 0.775 | |
| 2023 | 9.736 | –0.257 | 0.903 | 0.814 | |
| 2024 | 13.712 | 0.104 | 0.888 | 0.786 | |
| XGBoost | Spatial | 20.040 | 0.284 | 0.864 | 0.736 |
| 2022 | 7.679 | –0.101 | 0.796 | 0.624 | |
| 2023 | 11.758 | –0.364 | 0.855 | 0.729 | |
| 2024 | 15.727 | –0.012 | 0.849 | 0.719 |
| Variant | Val R2 | RMSE | Spatial R2 | 2022 R2 | 2023 R2 | 2024 R2 |
|---|---|---|---|---|---|---|
| Full Model | 0.929 | 8.85 | 0.937 | 0.826 | 0.918 | 0.922 |
| Spatial-Only GAT (No Temp) | 0.776 | 12.24 | 0.821 | 0.642 | 0.715 | 0.704 |
| Temporal-Only GAT (No Spatial) | 0.702 | 14.12 | 0.153 | 0.673 | 0.708 | 0.695 |
| No Engineered Features | 0.839 | 10.38 | 0.874 | 0.752 | 0.817 | 0.805 |
| No Slice-Bias Head | 0.912 | 9.72 | 0.928 | 0.794 | 0.881 | 0.872 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, H.; Zhang, Y.; Rehman, H.; Alam, M.; Ullah, Z.; Shahid, M.A.; Khan, M.; Siddique, A. A Hybrid Spatio-Temporal Graph Attention (ST D-GAT Framework) for Imputing Missing SBAS-InSAR Deformation Values to Strengthen Landslide Monitoring. Remote Sens. 2025, 17, 2613. https://doi.org/10.3390/rs17152613
Ahmad H, Zhang Y, Rehman H, Alam M, Ullah Z, Shahid MA, Khan M, Siddique A. A Hybrid Spatio-Temporal Graph Attention (ST D-GAT Framework) for Imputing Missing SBAS-InSAR Deformation Values to Strengthen Landslide Monitoring. Remote Sensing. 2025; 17(15):2613. https://doi.org/10.3390/rs17152613
Chicago/Turabian StyleAhmad, Hilal, Yinghua Zhang, Hafeezur Rehman, Mehtab Alam, Zia Ullah, Muhammad Asfandyar Shahid, Majid Khan, and Aboubakar Siddique. 2025. "A Hybrid Spatio-Temporal Graph Attention (ST D-GAT Framework) for Imputing Missing SBAS-InSAR Deformation Values to Strengthen Landslide Monitoring" Remote Sensing 17, no. 15: 2613. https://doi.org/10.3390/rs17152613
APA StyleAhmad, H., Zhang, Y., Rehman, H., Alam, M., Ullah, Z., Shahid, M. A., Khan, M., & Siddique, A. (2025). A Hybrid Spatio-Temporal Graph Attention (ST D-GAT Framework) for Imputing Missing SBAS-InSAR Deformation Values to Strengthen Landslide Monitoring. Remote Sensing, 17(15), 2613. https://doi.org/10.3390/rs17152613