

Integrating UAV-Based RGB Imagery with Semi-Supervised Learning for Tree Species Identification in Heterogeneous Forests

 ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition and Processing
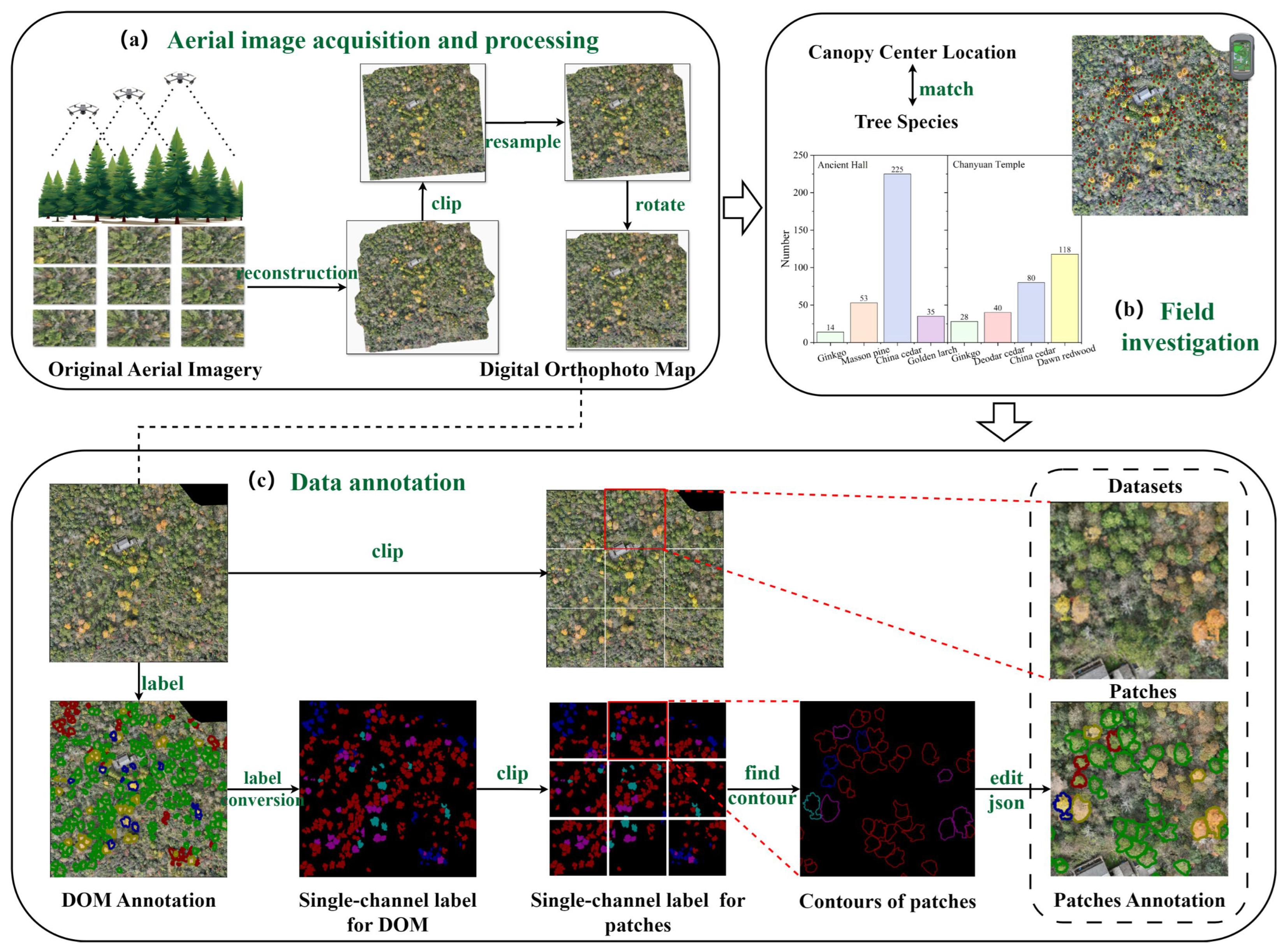
2.2.1. Aerial Image Acquisition and Processing
2.2.2. Field Investigation
2.2.3. Data Annotation
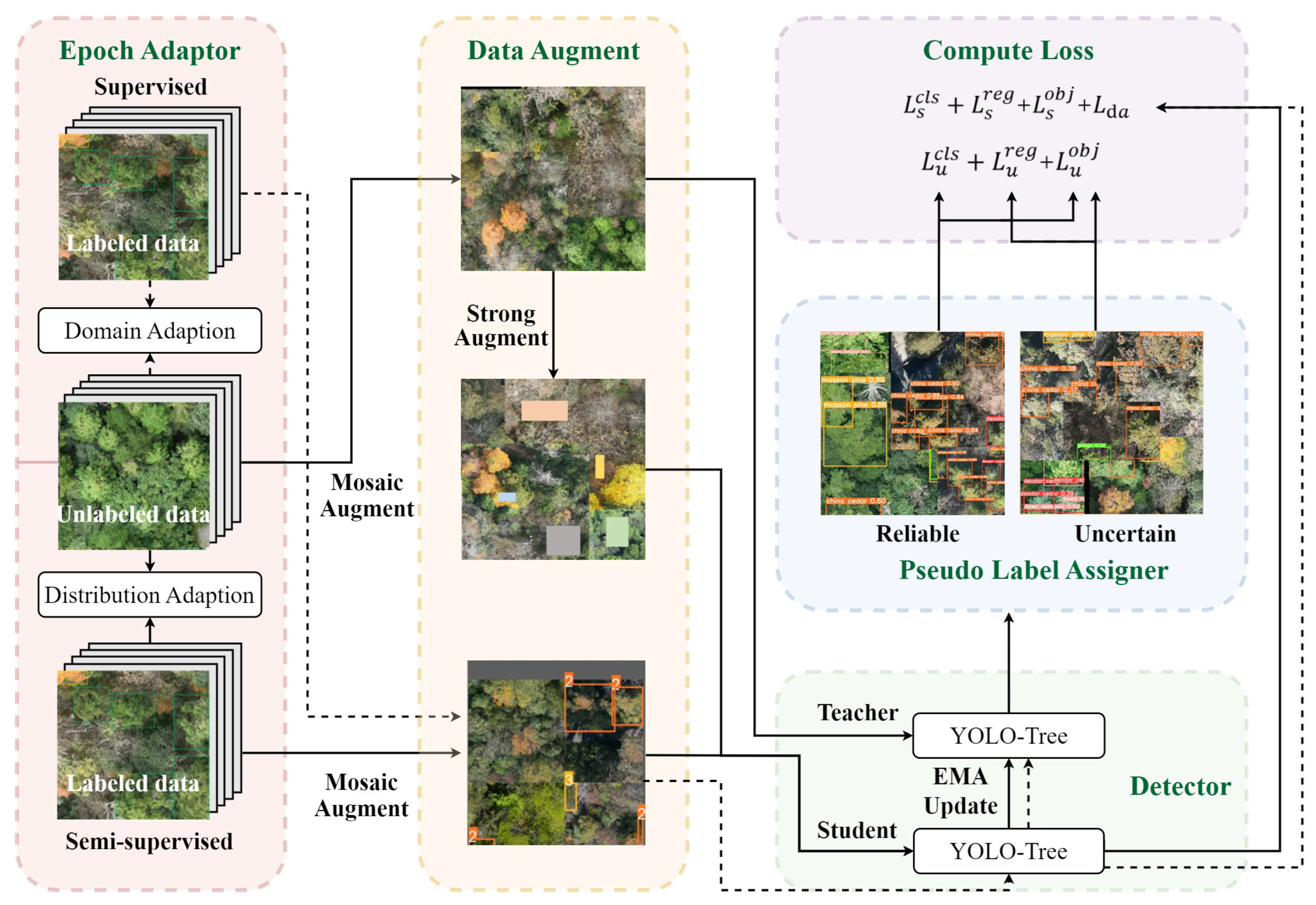
2.3. Semi-Supervised Object Detection
2.4. Experimental Setup
2.4.1. Datasets
2.4.2. Implementation Details
2.5. Evaluation Metrics
3. Results
3.1. Performance Comparison of YOLO-Tree with Other Supervised Models
3.2. Impact of Multiple Factors on the Performance of YOLO-Tree
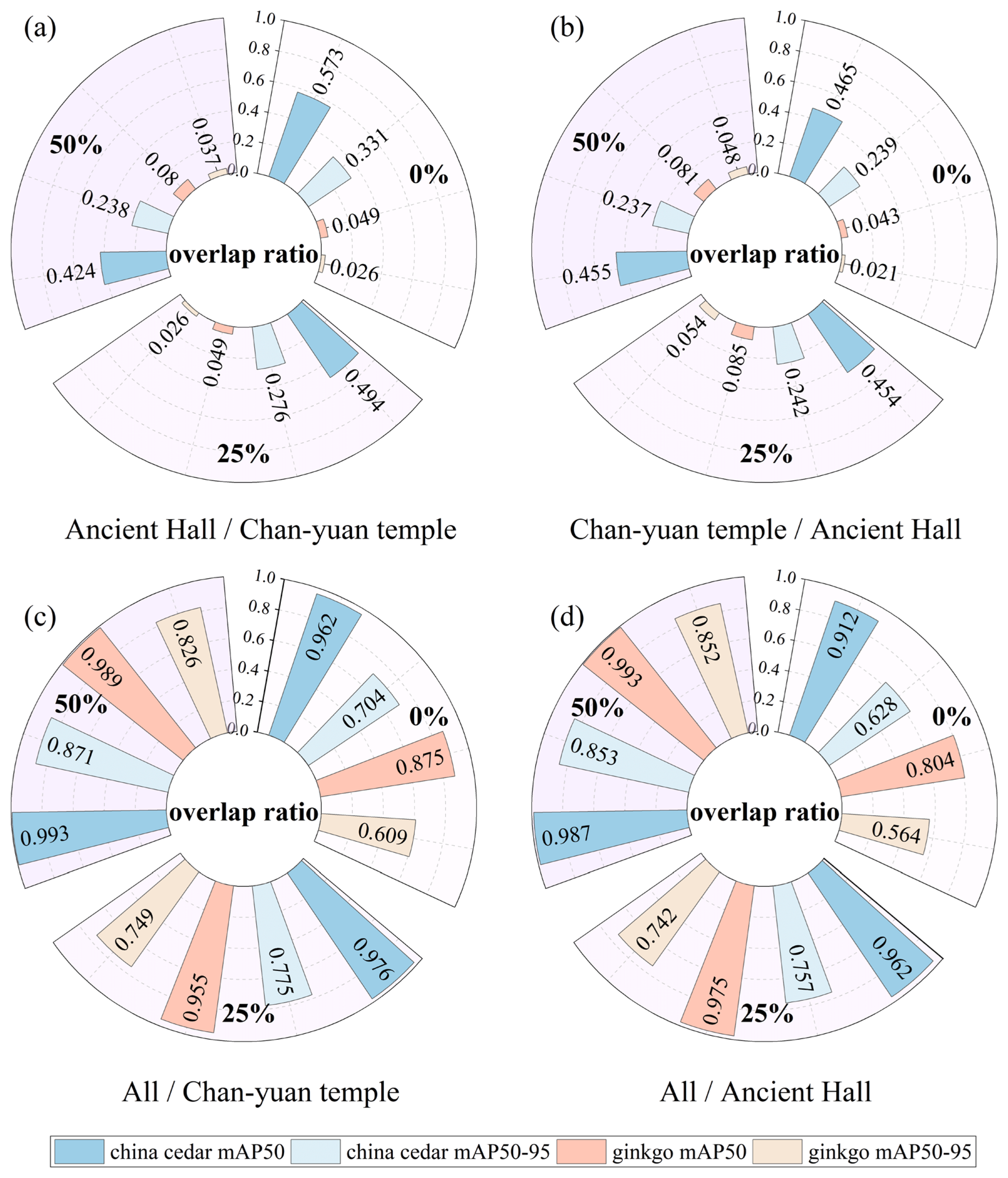
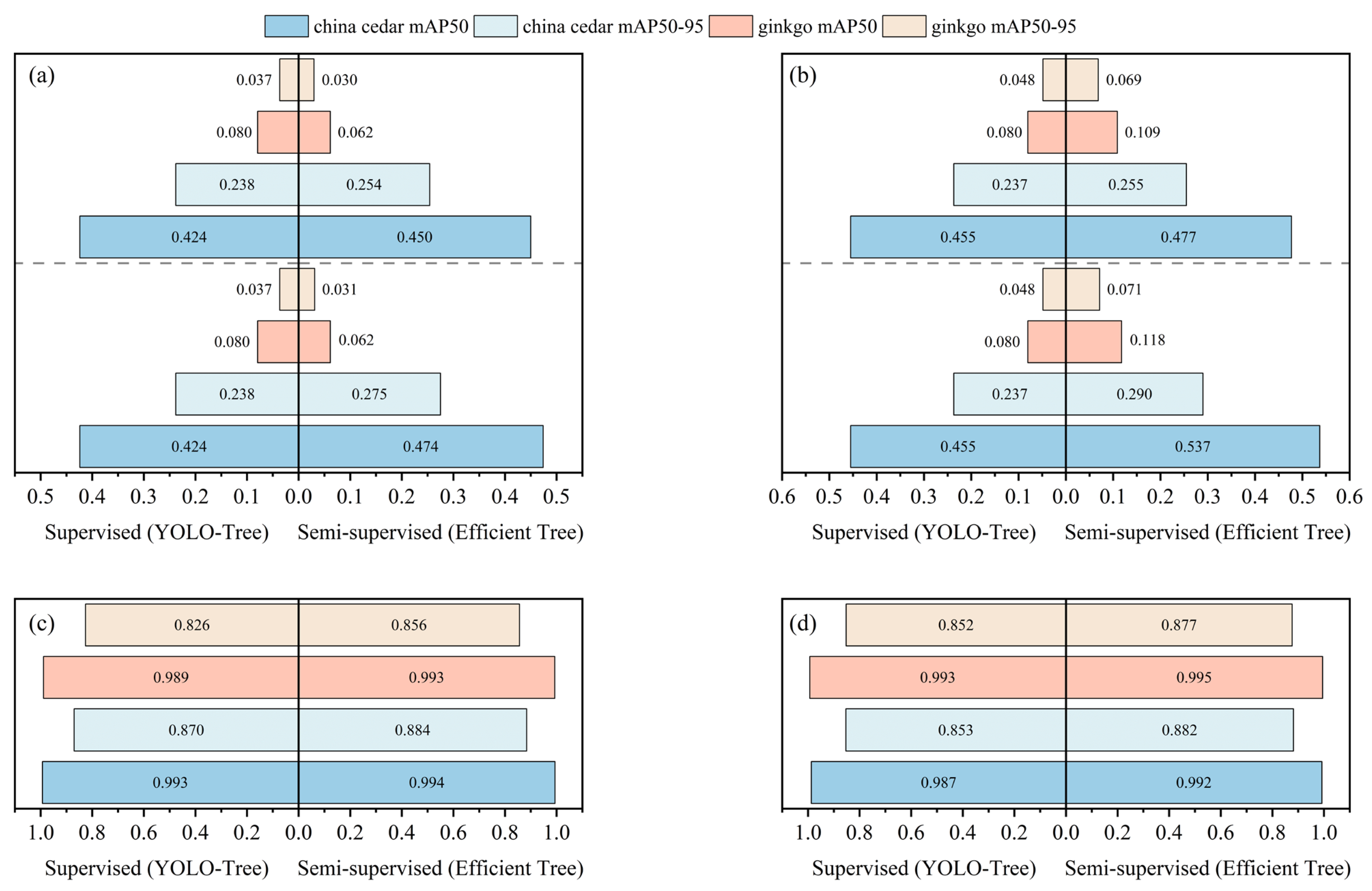
3.3. Performance Comparison Between ET and YOLO-Tree on Datasets with Varying Annotation Proportions
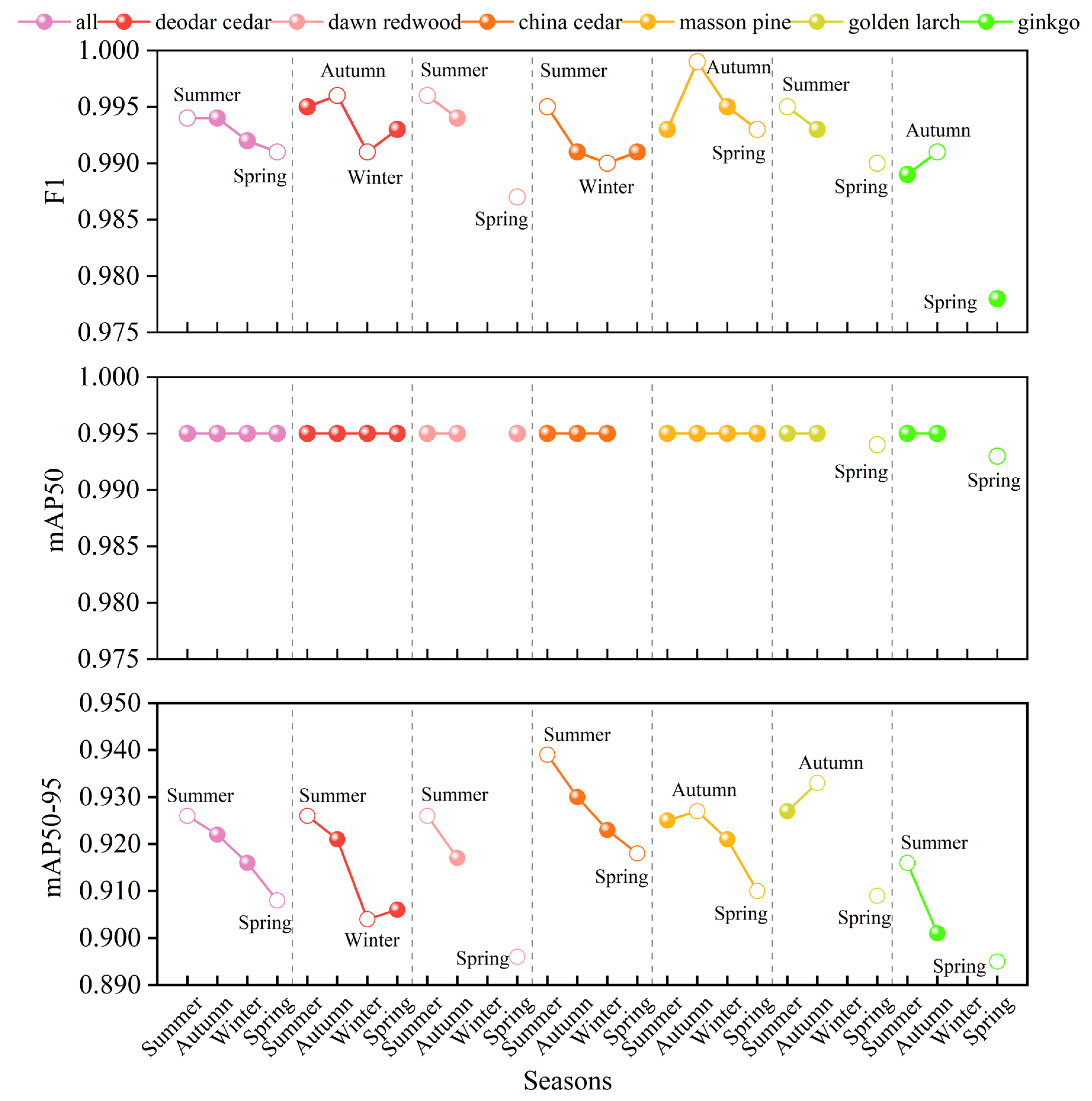
3.4. Influence of Phenology on Tree Species Identification
4. Discussion
4.1. Impact of Spatial Resolution and Overlap Ratio on the Detection Accuracy of YOLO-Tree
4.2. Impact of Site Conditions on the Generalization Capability of YOLO-Tree
4.3. The Effectiveness of Semi-Supervised Learning (SSL)
4.4. The Optimal Seasons for Tree Species Identification
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, G.; Bongers, F.J.; Trogisch, S.; Li, Y.; Chen, G.; Yan, H.; Deng, X.; Ma, K.; Liu, X. Climate and mycorrhizae mediate the relationship of tree species diversity and carbon stocks in subtropical forests. J. Ecol. 2022, 110, 2462–2474. [Google Scholar] [CrossRef]
- Ouaknine, A.; Kattenborn, T.; Laliberté, E.; Rolnick, D. OpenForest: A data catalog for machine learning in forest monitoring. Environ. Data Sci. 2025, 4, e15. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, X.; Wang, Z.; Yang, L.; Xie, Y.; Huang, Y. UAVs as remote sensing platforms in plant ecology: Review of applications and challenges. J. Plant Ecol. 2021, 14, 1003–1023. [Google Scholar] [CrossRef]
- Chen, J.; Liang, X.; Liu, Z.; Gong, W.; Chen, Y.; Hyyppä, J.; Kukko, A.; Wang, Y. Tree species recognition from close-range sensing: A review. Remote Sens. Environ. 2024, 313, 114337. [Google Scholar] [CrossRef]
- Onishi, M.; Ise, T. Explainable identification and mapping of trees using UAV RGB image and deep learning. Sci. Rep. 2021, 11, 903. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Lu, C.; Zhou, T.; Wu, J.; Feng, H. A 3D-2DCNN-CA approach for enhanced classification of hickory tree species using UAV-based hyperspectral imaging. Microchem. J. 2024, 199, 109981. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Sun, Z.; Liang, R.; Ding, Z.; Wang, B.; Huang, S.; Sun, Y. Instance segmentation and stand-scale forest mapping based on UAV images derived RGB and CHM. Comput. Electron. Agric. 2024, 220, 108878. [Google Scholar] [CrossRef]
- Shi, W.; Liao, X.; Wang, S.; Ye, H.; Wang, D.; Yue, H.; Liu, J. Evaluation of a CNN model to map vegetation classification in a subalpine coniferous forest using UAV imagery. Ecol. Inform. 2025, 87, 103111. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Kattenborn, T.; Eichel, J.; Wiser, S.; Burrows, L.; Fassnacht, F.E.; Schmidtlein, S. Convolutional Neural Networks accurately predict cover fractions of plant species and communities in Unmanned Aerial Vehicle imagery. Remote Sens. Ecol. Conserv. 2020, 6, 472–486. [Google Scholar] [CrossRef]
- Beloiu, M.; Heinzmann, L.; Rehush, N.; Gessler, A.; Griess, V.C. Individual Tree-Crown Detection and Species Identification in Heterogeneous Forests Using Aerial RGB Imagery and Deep Learning. Remote Sens. 2023, 15, 1463. [Google Scholar] [CrossRef]
- Yun, T.; Li, J.; Ma, L.; Zhou, J.; Wang, R.; Eichhorn, M.P.; Zhang, H. Status, advancements and prospects of deep learning methods applied in forest studies. Int. J. Appl. Earth Obs. Geoinf. 2024, 131, 103938. [Google Scholar] [CrossRef]
- Hamedianfar, A.; Mohamedou, C.; Kangas, A.; Vauhkonen, J. Deep learning for forest inventory and planning: A critical review on the remote sensing approaches so far and prospects for further applications. Forestry 2022, 95, 451–465. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, Y.; Sun, S.; Zhang, T.; Zhang, X.; Fei, S.; Chen, V. M2fNet: Multi-Modal Forest Monitoring Network on Large-Scale Virtual Dataset. In Proceedings of the 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Orlando, FL, USA, 16–21 March 2024; pp. 539–543. [Google Scholar] [CrossRef]
- Xu, W.; Cheng, Y.; Luo, M.; Mai, X.; Wang, W.; Zhang, W.; Wang, Y. Progress and Limitations in Forest Carbon Stock Estimation Using Remote Sensing Technologies: A Comprehensive Review. Forests 2025, 16, 449. [Google Scholar] [CrossRef]
- Fromm, M.; Schubert, M.; Castilla, G.; Linke, J.; McDermid, G. Automated Detection of Conifer Seedlings in Drone Imagery Using Convolutional Neural Networks. Remote Sens. 2019, 11, 2585. [Google Scholar] [CrossRef]
- Soltani, S.; Feilhauer, H.; Duker, R.; Kattenborn, T. Transfer learning from citizen science photographs enables plant species identification in UAV imagery. ISPRS Open J. Photogramm. Remote Sens. 2022, 5, 100016. [Google Scholar] [CrossRef]
- Chadwick, A.J.; Coops, N.C.; Bater, C.W.; Martens, L.A.; White, B. Transferability of a Mask R–CNN model for the delineation and classification of two species of regenerating tree crowns to untrained sites. Sci. Remote Sens. 2024, 9, 100109. [Google Scholar] [CrossRef]
- Hosseiny, B.; Mahdianpari, M.; Hemati, M.; Radman, A.; Mohammadimanesh, F.; Chanussot, J. Beyond Supervised Learning in Remote Sensing: A Systematic Review of Deep Learning Approaches. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 1035–1052. [Google Scholar] [CrossRef]
- Chen, J.; Chen, G.; Zhang, L.; Huang, M.; Luo, J.; Ding, M.; Ge, Y. Category-sensitive semi-supervised semantic segmentation framework for land-use/land-cover mapping with optical remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2024, 134, 104160. [Google Scholar] [CrossRef]
- Huang, W.; Shi, Y.; Xiong, Z.; Zhu, X.X. Decouple and weight semi-supervised semantic segmentation of remote sensing images. ISPRS J. Photogramm. Remote Sens. 2024, 212, 13–26. [Google Scholar] [CrossRef]
- Lv, L.; Zhang, L. Advancing Data-Efficient Exploitation for Semi-Supervised Remote Sensing Images Semantic Segmentation. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Liu, N.; Xu, X.; Gao, Y.; Zhao, Y.; Li, H.-C. Semi-supervised object detection with uncurated unlabeled data for remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2024, 129, 103814. [Google Scholar] [CrossRef]
- Fang, Z.; Ren, J.; Zheng, J.; Chen, R.; Zhao, H. Dual Teacher: Improving the Reliability of Pseudo Labels for Semi-Supervised Oriented Object Detection. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–15. [Google Scholar] [CrossRef]
- Luo, J.; Fan, J.; Huang, S.; Wu, S.; Zhang, F.; Li, X. Semi-supervised learning techniques for detection of dead pine trees with UAV imagery for pine wilt disease control. Int. J. Remote Sens. 2025, 46, 575–605. [Google Scholar] [CrossRef]
- Xu, B.; Chen, M.; Guan, W.; Hu, L. Efficient Teacher: Semi-Supervised Object Detection for YOLOv5. arXiv 2023. [Google Scholar] [CrossRef]
- Zhang, L.; Lin, H.; Wang, F. Individual Tree Detection Based on High-Resolution RGB Images for Urban Forestry Applications. IEEE Access 2022, 10, 46589–46598. [Google Scholar] [CrossRef]
- Amirkolaee, H.A.; Shi, M.; Mulligan, M. TreeFormer: A Semi-Supervised Transformer-Based Framework for Tree Counting From a Single High-Resolution Image. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–15. [Google Scholar] [CrossRef]
- Cao, F.; Yan, K.; Chen, H.; Wang, Z.; Du, Y.; Zheng, Z.; Li, K.; Qi, B.; Wang, M. SSCD-YOLO: Semi-Supervised Cross-Domain YOLOv8 for Pedestrian Detection in Low-Light Conditions. IEEE Access 2025, 13, 61225–61236. [Google Scholar] [CrossRef]
- Dai, Y.; Gieseke, F.; Oehmcke, S.; Wu, Y.; Barnard, K. Attentional Feature Fusion. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 3559–3568. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar] [CrossRef]
- Zhong, H.; Zhang, Z.; Liu, H.; Wu, J.; Lin, W. Individual Tree Species Identification for Complex Coniferous and Broad-Leaved Mixed Forests Based on Deep Learning Combined with UAV LiDAR Data and RGB Images. Forests 2024, 15, 293. [Google Scholar] [CrossRef]
- Ullah, S.; Ilniyaz, O.; Eziz, A.; Ullah, S.; Fidelis, G.D.; Kiran, M.; Azadi, H.; Ahmed, T.; Elfleet, M.S.; Kurban, A. Multi-Temporal and Multi-Resolution RGB UAV Surveys for Cost-Efficient Tree Species Mapping in an Afforestation Project. Remote Sens. 2025, 17, 949. [Google Scholar] [CrossRef]
- Miraki, M.; Sohrabi, H.; Fatehi, P.; Kneubuehler, M. Individual tree crown delineation from high-resolution UAV images in broadleaf forest. Ecol. Inform. 2021, 61, 101207. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.A.; Zare, A.; White, E.P. Cross-site learning in deep learning RGB tree crown detection. Ecol. Inform. 2020, 56, 101061. [Google Scholar] [CrossRef]
- Yang, R.; Chen, M.; Lu, X.; He, Y.; Li, Y.; Xu, M.; Li, M.; Huang, W.; Liu, F. Integrating UAV remote sensing and semi-supervised learning for early-stage maize seedling monitoring and geolocation. Plant Phenomics 2025, 7, 100011. [Google Scholar] [CrossRef]
- Liang, X.; Chen, J.; Gong, W.; Puttonen, E.; Wang, Y. Influence of data and methods on high-resolution imagery-based tree species recognition considering phenology: The case of temperate forests. Remote Sens. Environ. 2025, 323, 114654. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, R.; Lin, C.-F.; Zhang, Z.; Zhang, R.; Shang, K.; Zhao, M.; Huang, J.; Wang, X.; Li, Y.; et al. Remote sensing of subtropical tree diversity: The underappreciated roles of the practical definition of forest canopy and phenological variation. For. Ecosyst. 2023, 10, 100122. [Google Scholar] [CrossRef]
- Jiang, M.; Kong, J.; Zhang, Z.; Hu, J.; Qin, Y.; Shang, K.; Zhao, M.; Zhang, J. Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests. Forests 2023, 14, 908. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Model | Metrics | ||||||
|---|---|---|---|---|---|---|---|---|
| P | R | F1 | mAP50 | mAP50-95 | Params (M) | FPS | ||
| Ancient Hall | RetinaNet | 0.566 | 0.749 | 0.645 | 0.790 | 0.524 | 37.74 | 50.3 |
| YOLOv5 | 0.885 | 0.797 | 0.839 | 0.883 | 0.603 | 7.03 | 256.4 | |
| YOLOv8 | 0.925 | 0.772 | 0.842 | 0.874 | 0.646 | 9.84 | 312.5 | |
| YOLOv11 | 0.903 | 0.829 | 0.864 | 0.903 | 0.680 | 9.43 | 238.1 | |
| Our | 0.934 | 0.852 | 0.891 | 0.930 | 0.684 | 26.11 | 172.4 | |
| Chan-yuan Temple | RetinaNet | 0.651 | 0.839 | 0.733 | 0.868 | 0.576 | 37.74 | 50.3 |
| YOLOv5 | 0.921 | 0.855 | 0.887 | 0.925 | 0.624 | 7.03 | 256.4 | |
| YOLOv8 | 0.933 | 0.904 | 0.918 | 0.952 | 0.698 | 9.84 | 312.5 | |
| YOLOv11 | 0.902 | 0.913 | 0.907 | 0.948 | 0.697 | 9.43 | 238.1 | |
| Our | 0.937 | 0.891 | 0.913 | 0.939 | 0.665 | 26.11 | 172.4 | |
| All | RetinaNet | 0.601 | 0.805 | 0.688 | 0.840 | 0.551 | 37.74 | 50.3 |
| YOLOv5 | 0.883 | 0.855 | 0.869 | 0.912 | 0.624 | 7.03 | 256.4 | |
| YOLOv8 | 0.887 | 0.851 | 0.869 | 0.920 | 0.674 | 9.84 | 312.5 | |
| YOLOv11 | 0.898 | 0.869 | 0.883 | 0.928 | 0.681 | 9.43 | 238.1 | |
| Our | 0.910 | 0.875 | 0.892 | 0.927 | 0.659 | 26.11 | 172.4 | |
| Datasets | Model | Metrics | ||||||
|---|---|---|---|---|---|---|---|---|
| ResNet34 Backbone | YOLOv8 neck | MSAM+ CAM | P | R | F1 | mAP50 | mAP50-95 | |
| Ancient Hall | × | × | × | 0.885 | 0.797 | 0.839 | 0.883 | 0.603 |
| √ | × | × | 0.891 | 0.830 | 0.859 | 0.891 | 0.626 | |
| √ | √ | × | 0.904 | 0.874 | 0.889 | 0.931 | 0.668 | |
| √ | √ | √ | 0.934 | 0.852 | 0.891 | 0.930 | 0.684 | |
| Chan-yuan Temple | × | × | × | 0.921 | 0.855 | 0.887 | 0.925 | 0.624 |
| √ | × | × | 0.926 | 0.859 | 0.891 | 0.931 | 0.646 | |
| √ | √ | × | 0.903 | 0.901 | 0.902 | 0.930 | 0.654 | |
| √ | √ | √ | 0.937 | 0.891 | 0.913 | 0.939 | 0.665 | |
| Locations | Overlap Ratio (%) | Flight Height (m) | Metrics | ||||
|---|---|---|---|---|---|---|---|
| P | R | F1 | mAP50 | mAP50-95 | |||
| Ancient Hall | 0 | 60 | 0.823 | 0.720 | 0.768 | 0.779 | 0.530 |
| 100 | 0.876 | 0.753 | 0.810 | 0.799 | 0.557 | ||
| 150 | 0.972 | 0.816 | 0.887 | 0.914 | 0.618 | ||
| 25 | 60 | 0.883 | 0.911 | 0.897 | 0.929 | 0.648 | |
| 100 | 0.937 | 0.913 | 0.925 | 0.939 | 0.704 | ||
| 150 | 0.970 | 0.892 | 0.929 | 0.951 | 0.752 | ||
| 50 | 60 | 0.973 | 0.957 | 0.965 | 0.975 | 0.851 | |
| 100 | 0.989 | 0.974 | 0.981 | 0.993 | 0.880 | ||
| 150 | 0.997 | 0.987 | 0.992 | 0.994 | 0.895 | ||
| Chan-yuan Temple | 0 | 60 | 0.914 | 0.804 | 0.855 | 0.904 | 0.609 |
| 100 | 0.932 | 0.880 | 0.905 | 0.917 | 0.638 | ||
| 150 | 0.944 | 0.917 | 0.930 | 0.962 | 0.652 | ||
| 25 | 60 | 0.922 | 0.882 | 0.902 | 0.948 | 0.727 | |
| 100 | 0.937 | 0.918 | 0.927 | 0.955 | 0.739 | ||
| 150 | 0.980 | 0.934 | 0.956 | 0.973 | 0.788 | ||
| 50 | 60 | 0.973 | 0.958 | 0.965 | 0.985 | 0.871 | |
| 100 | 0.993 | 0.974 | 0.983 | 0.989 | 0.895 | ||
| 150 | 0.998 | 0.988 | 0.993 | 0.995 | 0.893 | ||
| All | 0 | 60 | 0.835 | 0.802 | 0.818 | 0.874 | 0.609 |
| 100 | 0.868 | 0.821 | 0.844 | 0.873 | 0.620 | ||
| 150 | 0.924 | 0.878 | 0.900 | 0.937 | 0.636 | ||
| 25 | 60 | 0.909 | 0.896 | 0.902 | 0.941 | 0.704 | |
| 100 | 0.949 | 0.924 | 0.936 | 0.953 | 0.745 | ||
| 150 | 0.974 | 0.913 | 0.943 | 0.959 | 0.757 | ||
| 50 | 60 | 0.981 | 0.950 | 0.965 | 0.982 | 0.854 | |
| 100 | 0.987 | 0.971 | 0.979 | 0.989 | 0.884 | ||
| 150 | 0.986 | 0.979 | 0.982 | 0.993 | 0.892 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, B.; Lin, C.; Chen, M.; Gouda, M.M.; Zhao, Y.; Chen, Y.; Liu, F.; Feng, X. Integrating UAV-Based RGB Imagery with Semi-Supervised Learning for Tree Species Identification in Heterogeneous Forests. Remote Sens. 2025, 17, 2541. https://doi.org/10.3390/rs17152541
Hou B, Lin C, Chen M, Gouda MM, Zhao Y, Chen Y, Liu F, Feng X. Integrating UAV-Based RGB Imagery with Semi-Supervised Learning for Tree Species Identification in Heterogeneous Forests. Remote Sensing. 2025; 17(15):2541. https://doi.org/10.3390/rs17152541
Chicago/Turabian StyleHou, Bingru, Chenfeng Lin, Mengyuan Chen, Mostafa M. Gouda, Yunpeng Zhao, Yuefeng Chen, Fei Liu, and Xuping Feng. 2025. "Integrating UAV-Based RGB Imagery with Semi-Supervised Learning for Tree Species Identification in Heterogeneous Forests" Remote Sensing 17, no. 15: 2541. https://doi.org/10.3390/rs17152541
APA StyleHou, B., Lin, C., Chen, M., Gouda, M. M., Zhao, Y., Chen, Y., Liu, F., & Feng, X. (2025). Integrating UAV-Based RGB Imagery with Semi-Supervised Learning for Tree Species Identification in Heterogeneous Forests. Remote Sensing, 17(15), 2541. https://doi.org/10.3390/rs17152541