

InSAR Detection of Slow Ground Deformation: Taking Advantage of Sentinel-1 Time Series Length in Reducing Error Sources


Abstract

1. Introduction
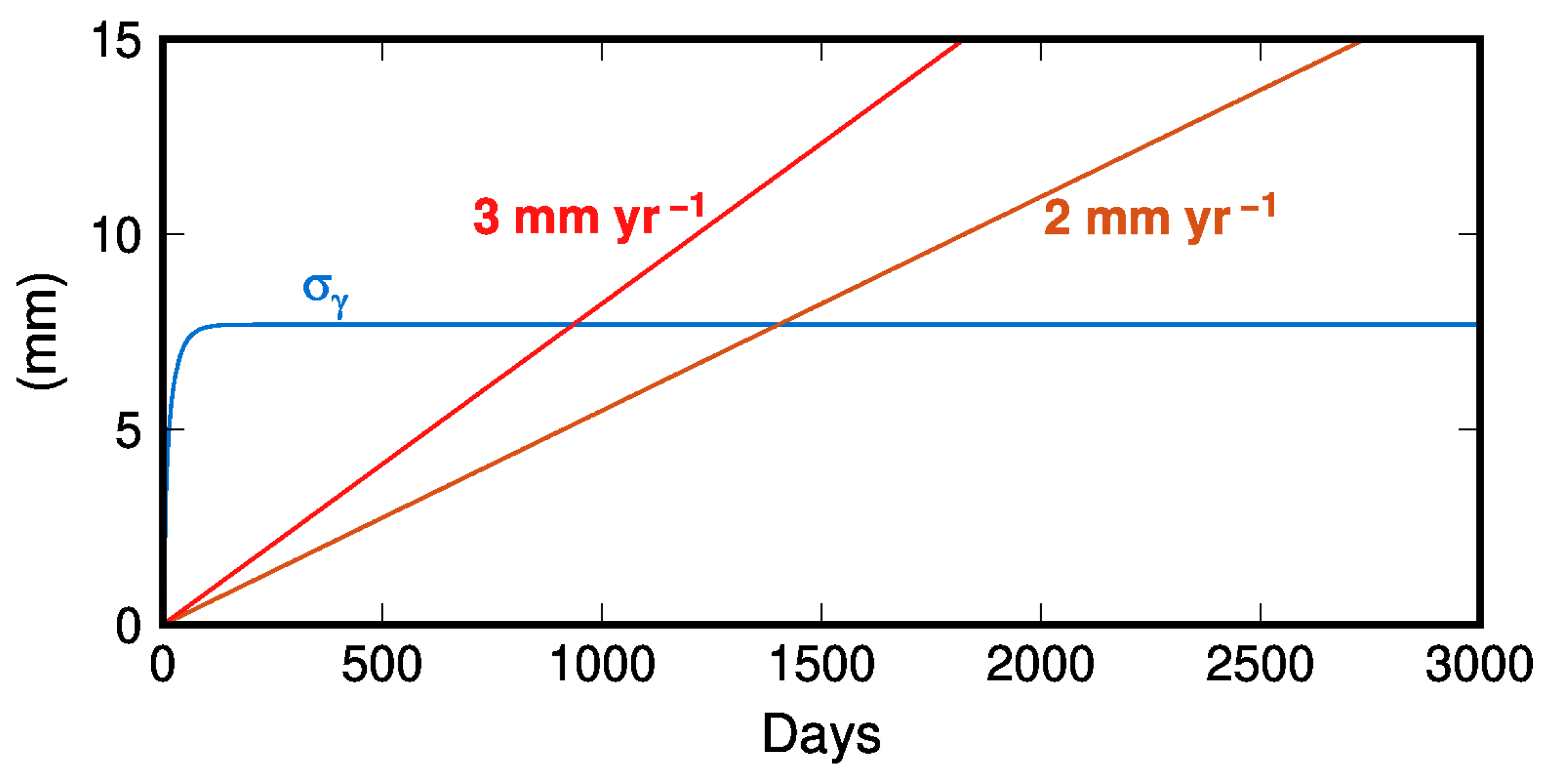
2. Coherence Phase Noise
3. Tropospheric Phase Delay Error
3.1. Tropospheric Phase Delay Error and Time Series Estimation
3.2. APS from GNSS Zenith Total Delay
3.3. Tropospheric Phase Delay Simulation
4. Unwrapping Error
Unwrapping Error and Time Series Simulation
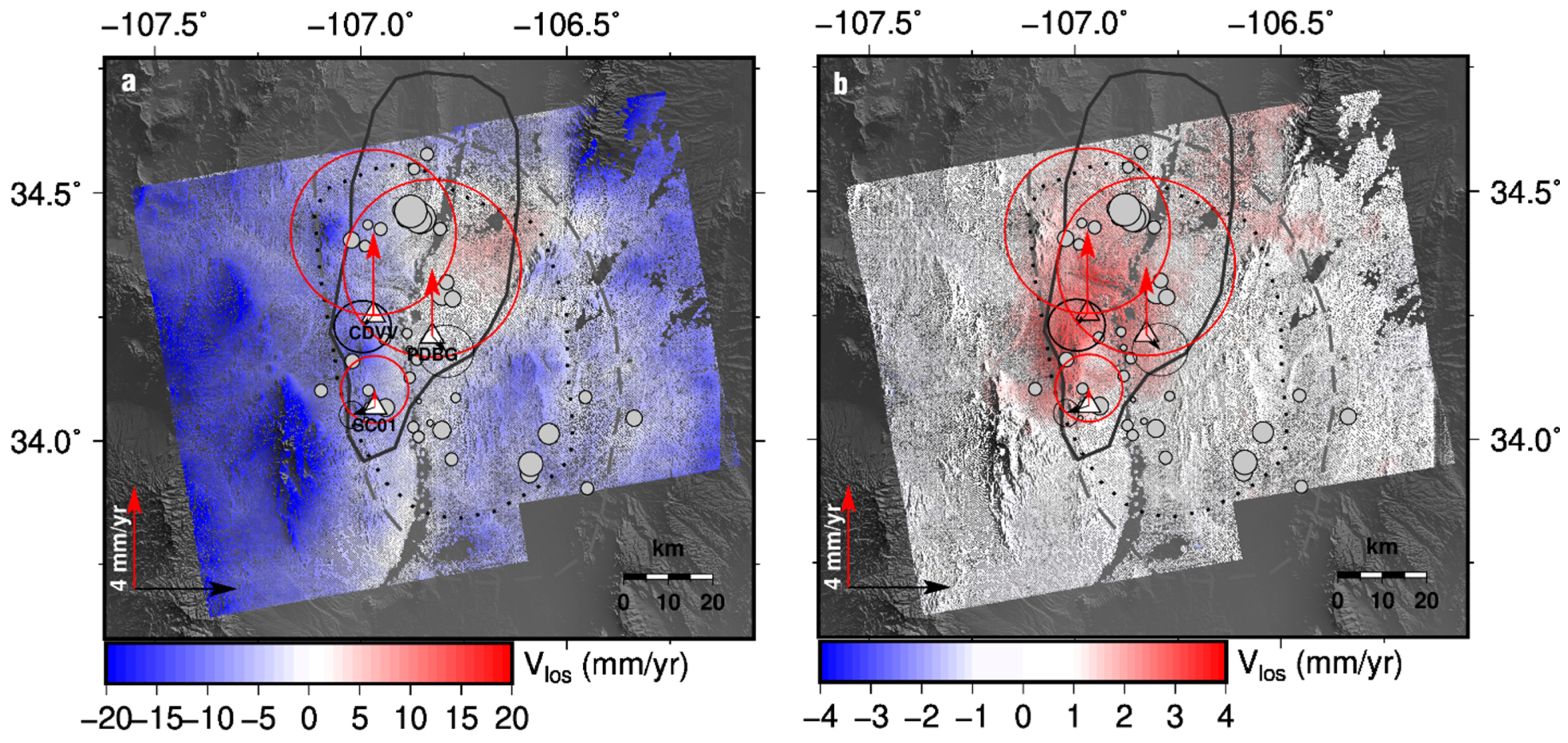
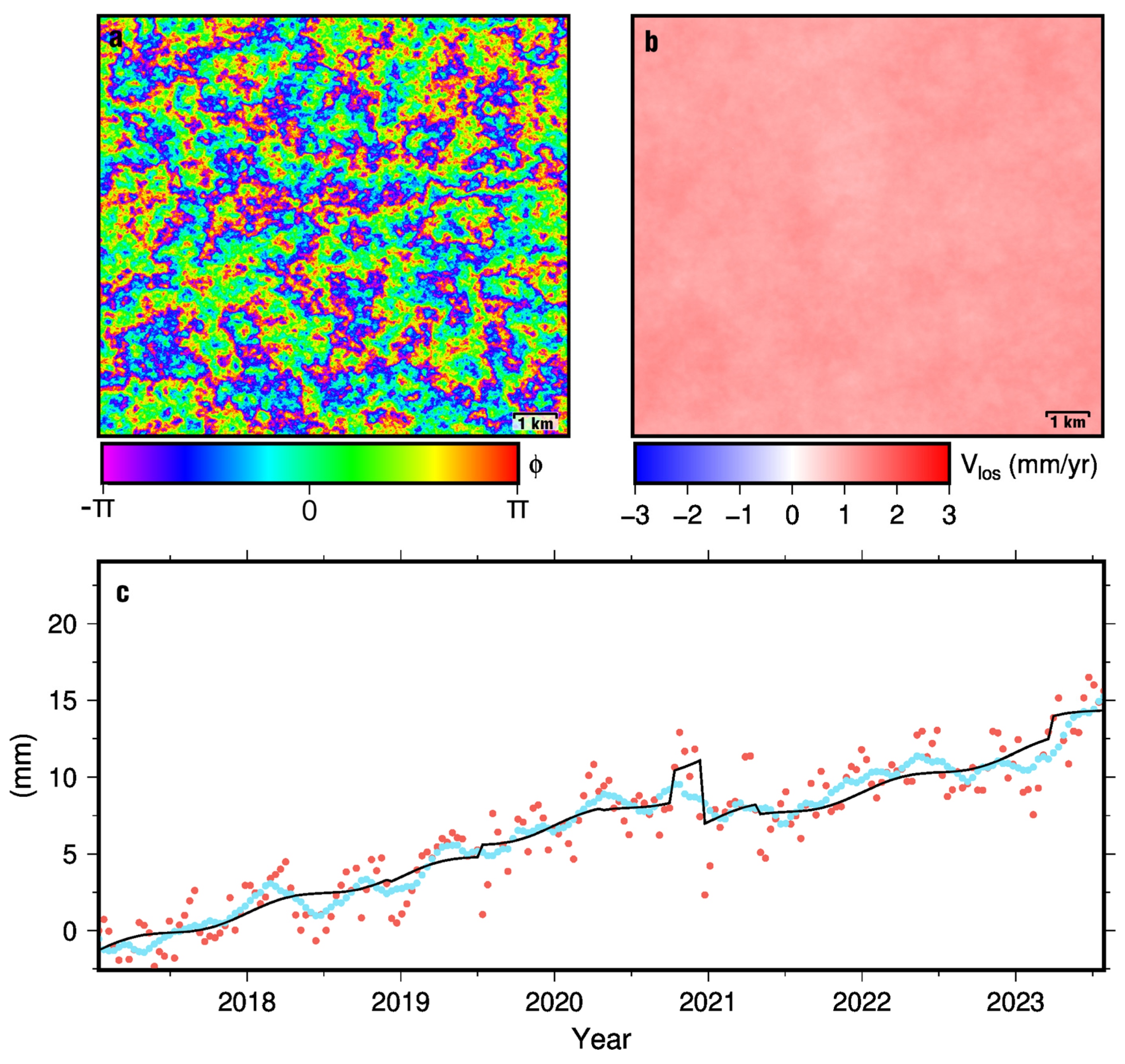
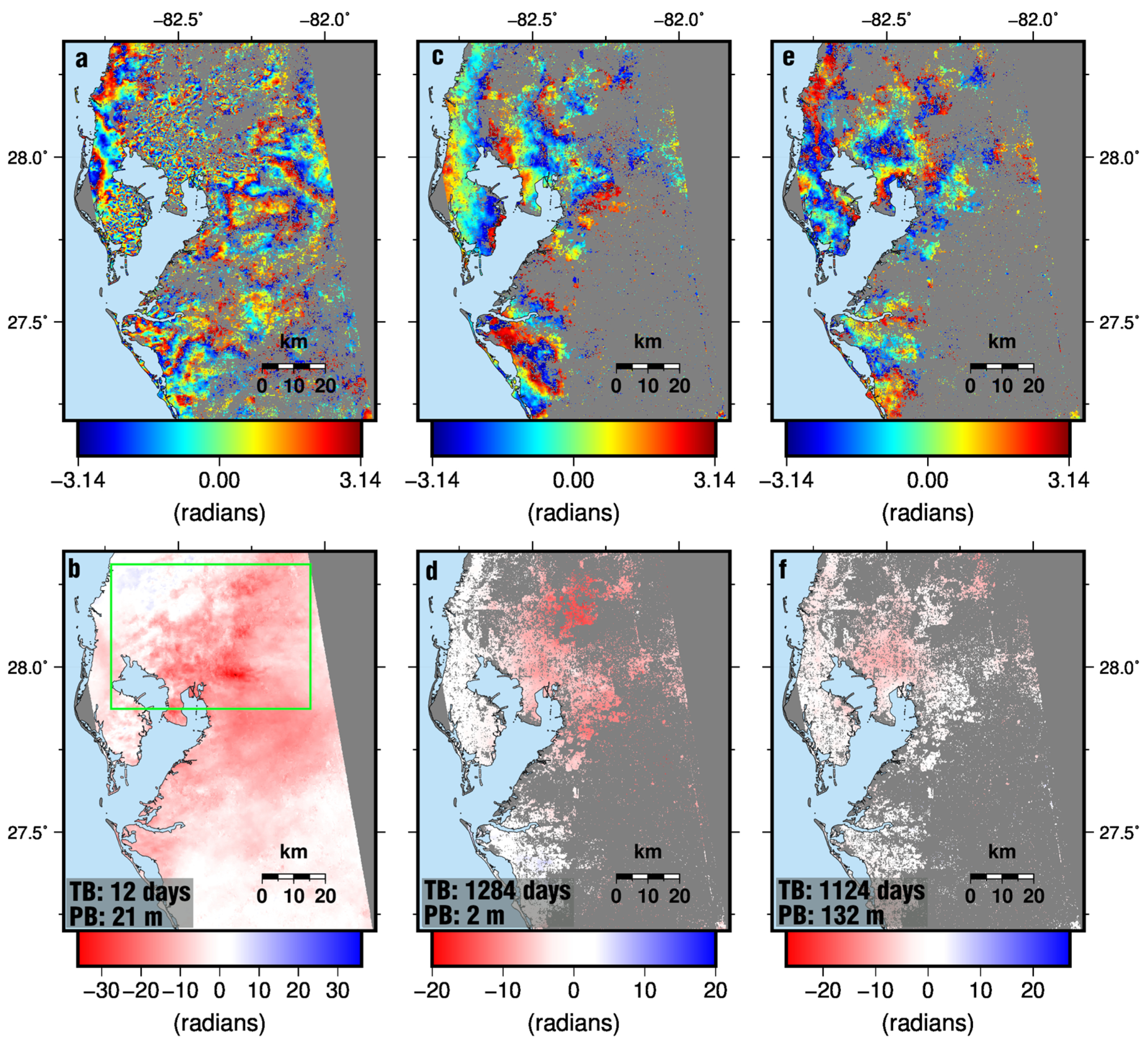
5. LTSPB Applied to the TBA and SMB
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| APS | Atmospheric phase screen |
| GACOS | Generic Atmospheric Correction Online Service |
| GNSS | Global Navigation Satellite System |
| InSAR | Interferometric synthetic aperture radar |
| LOS | Line of sight |
| LTSPB | Long-temporal short-perpendicular baselines |
| SAR | Synthetic aperture radar |
| SBAS | Short baselines |
| SMB | Socorro magma body |
| TBA | Tampa bay area |
| ZTD | Zenith total delay |
Appendix A
- SNAPHU configuration parameters used to ensure smooth unwrapping:
- DEFOMAX_CYCLE 0
- DEFOCONST 0.01
Appendix B
Appendix C
Appendix D
References
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The Displacement Field of the Landers Earthquake Mapped by Radar Interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Pinel, V.; Poland, M.P.; Hooper, A. Volcanology: Lessons Learned from Synthetic Aperture Radar Imagery. J. Volcanol. Geotherm. Res. 2014, 289, 81–113. [Google Scholar] [CrossRef]
- Colesanti, C.; Ferretti, A.; Prati, C.; Rocca, F. Monitoring Landslides and Tectonic Motions with the Permanent Scatterers Technique. Eng. Geol. 2003, 68, 3–14. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Engelhardt, H.; Kamb, B.; Frolich, R.M. Satellite Radar Interferometry for Monitoring Ice Sheet Motion: Application to an Antarctic Ice Stream. Science 1993, 262, 1525–1530. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Casu, F.; Manzo, M.; Lanari, R. A Quantitative Assessment of the SBAS Algorithm Performance for Surface Deformation Retrieval from DInSAR Data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Agram, P.S.; Simons, M. A Noise Model for InSAR Time Series. J. Geophys. Res. Solid Earth 2015, 120, 2752–2771. [Google Scholar] [CrossRef]
- Pepe, A. Multi-Temporal Small Baseline Interferometric Sar Algorithms: Error Budget and Theoretical Performance. Remote Sens. 2021, 13, 557. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in Interferometric Radar Echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Fattahi, H.; Simons, M.; Agram, P. InSAR Time-Series Estimation of the Ionospheric Phase Delay: An Extension of the Split Range-Spectrum Technique. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5984–5996. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K.L. Radar Interferometry and Its Application to Changes in the Earth’s Surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Zebker, H.A.; Rosen, P.A.; Hensley, S. Atmospheric Effects in Interferometric Synthetic Aperture Radar Surface Deformation and Topographic Maps. J. Geophys. Res. Solid Earth 1997, 102, 7547–7563. [Google Scholar] [CrossRef]
- Zheng, Y.; Fattahi, H.; Agram, P.; Simons, M.; Rosen, P. On Closure Phase and Systematic Bias in Multilooked SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Sica, F.; Pulella, A.; Nannini, M.; Pinheiro, M.; Rizzoli, P. Repeat-Pass SAR Interferometry for Land Cover Classification: A Methodology Using Sentinel-1 Short-Time-Series. Remote Sens. Environ. 2019, 232, 111277. [Google Scholar] [CrossRef]
- Morishita, Y.; Hanssen, R.F. Temporal Decorrelation in L-, C-, and X-Band Satellite Radar Interferometry for Pasture on Drained Peat Soils. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1096–1104. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M. Evidence for On-Going Inflation of the Socorro Magma Body, New Mexico, from Interferometric Synthetic Aperture Radar Imaging. Geophys. Res. Lett. 2001, 28, 3549–3552. [Google Scholar] [CrossRef]
- Havazli, E.; Wdowinski, S. Detection Threshold Estimates for Insar Time Series: A Simulation of Tropospheric Delay Approach. Sensors 2021, 21, 1124. [Google Scholar] [CrossRef]
- Finnegan, N.J.; Pritchard, M.E. Magnitude and Duration of Surface Uplift above the Socorro Magma Body. Geology 2009, 37, 231–234. [Google Scholar] [CrossRef]
- Wu, P.; Wei, M.; D’Hondt, S. Subsidence in Coastal Cities Throughout the World Observed by InSAR. Geophys. Res. Lett. 2022, 49, e2022GL098477. [Google Scholar] [CrossRef]
- Ohenhen, L.O.; Shirzaei, M.; Ojha, C.; Sherpa, S.F.; Nicholls, R.J. Disappearing Cities on US Coasts. Nature 2024, 627, 108–115. [Google Scholar] [CrossRef]
- Blewitt, G.; Kreemer, C.; Hammond, W.C.; Gazeaux, J. MIDAS Robust Trend Estimator for Accurate GPS Station Velocities without Step Detection. J. Geophys. Res. Solid Earth 2016, 121, 2054–2068. [Google Scholar] [CrossRef] [PubMed]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic Aperture Radar Interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Bamler, R.; Hartl, P. Synthetic Aperture Radar Interferometry. Inverse Probl. 1998, 14, R1. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Dordrecht, The Netherlands, 2001; Volume 2. [Google Scholar]
- Rodriguez, E.; Martin, J.M. Theory and Design of Interferometric Synthetic Aperture Radars. In IEE Proceedings F (Radar and Signal Processing); IEE: London, UK, 1992; Volume 139, pp. 147–159. [Google Scholar]
- Delacourt, C.; Briole, P.; Achache, J. Tropospheric Corrections of SAR Interferograms with Strong Topography. Application to Etna. Geophys. Res. Lett. 1998, 25, 2849–2852. [Google Scholar] [CrossRef]
- Lin, Y.N.N.; Simons, M.; Hetland, E.A.; Muse, P.; Dicaprio, C. A Multiscale Approach to Estimating Topographically Correlated Propagation Delays in Radar Interferograms. Geochem. Geophys. Geosystems 2010, 11, 1–17. [Google Scholar] [CrossRef]
- Bekaert, D.P.S.; Hooper, A.; Wright, T.J. A Spatially Variable Power Law Tropospheric Correction Technique for InSAR Data. J. Geophys. Res. Solid Earth 2015, 120, 1345–1356. [Google Scholar] [CrossRef]
- Onn, F.; Zebker, H.A. Correction for Interferometric Synthetic Aperture Radar Atmospheric Phase Artifacts Using Time Series of Zenith Wet Delay Observations from a GPS Network. J. Geophys. Res. Solid Earth 2006, 111, 1–16. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.P.; Cross, P.; Fielding, E.J. Interferometric Synthetic Aperture Radar (InSAR) Atmospheric Correction: GPS, Moderate Resolution Imaging Spectroradiometer (MODIS), and InSAR Integration. J. Geophys. Res. Solid Earth 2005, 110, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Muller, J.P.; Cross, P.; Albert, P.; Fischer, J.; Bennartz, R. Assessment of the Potential of MERIS Near-Infrared Water Vapour Products to Correct ASAR Interferometric Measurements. Int. J. Remote Sens. 2006, 27, 349–365. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 Global Reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Yu, C.; Li, Z.; Penna, N.T.; Crippa, P. Generic Atmospheric Correction Model for Interferometric Synthetic Aperture Radar Observations. J. Geophys. Res. Solid Earth 2018, 123, 9202–9222. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic InSAR Tropospheric Phase Delay Corrections from Global Meteorological Reanalysis Data. Geophys. Res. Lett. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Stephens, K.J.; Wauthier, C.; Bussard, R.C.; Higgins, M. Assessment of Mitigation Strategies for Tropospheric Phase Contributions to InSAR Time-Series Datasets over Two Nicaraguan Volcanoes. Remote Sens. 2020, 12, 782. [Google Scholar] [CrossRef]
- Yang, Q.; Zuo, X.; Guo, S.; Zhao, Y. Evaluation of InSAR Tropospheric Delay Correction Methods in the Plateau Monsoon Climate Region Considering Spatial–Temporal Variability. Sensors 2023, 23, 9574. [Google Scholar] [CrossRef]
- Bekaert, D.P.S.; Walters, R.J.; Wright, T.J.; Hooper, A.J.; Parker, D.J. Statistical Comparison of InSAR Tropospheric Correction Techniques. Remote Sens. Environ. 2015, 170, 40–47. [Google Scholar] [CrossRef]
- Burgmann, R.; Rosen, P.A.; Fielding, E.J. Synthetic Aperture Radar Interferometry to Measure Earth’s Surface Topography and Its Deformation. Annu. Rev. Earth Planet. Sci. 2000, 28, 169–209. [Google Scholar] [CrossRef]
- Fattahi, H.; Amelung, F. InSAR Bias and Uncertainty Due to the Systematic and Stochastic Tropospheric Delay. J. Geophys. Res. Solid Earth 2015, 120, 8758–8773. [Google Scholar] [CrossRef]
- Janssen, V.; Ge, L.; Rizos, C. Tropospheric Corrections to SAR Interferometry from GPS Observations. GPS Solut. 2004, 8, 140–151. [Google Scholar] [CrossRef]
- Doin, M.P.; Lasserre, C.; Peltzer, G.; Cavalié, O.; Doubre, C. Corrections of Stratified Tropospheric Delays in SAR Interferometry: Validation with Global Atmospheric Models. J. Appl. Geophys. 2009, 69, 35–50. [Google Scholar] [CrossRef]
- Samsonov, S.V.; Trishchenko, A.P.; Tiampo, K.; González, P.J.; Zhang, Y.; Fernández, J. Removal of Systematic Seasonal Atmospheric Signal from Interferometric Synthetic Aperture Radar Ground Deformation Time Series. Geophys. Res. Lett. 2014, 41, 6123–6130. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Phase Unwrapping for Large SAR Interferograms: Statistical Segmentation and Generalized Network Models. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1709–1719. [Google Scholar] [CrossRef]
- Samsonov, S.V. User Manual, Source Code, and Test Set for MSBASv3 (Multidimensional Small Baseline Subset Version 3) for One-and Two-Dimensional Deformation Analysis. Geomat. Can. Open File 2019, 45, 13. [Google Scholar]
- Xu, X.; Sandwell, D.T. InSAR: Correcting for Earth Tides and Phase. IEEE Trans. Geosci. Remote Sens. 2020, 58, 726–733. [Google Scholar] [CrossRef]
- Oliver-Cabrera, T.; Jones, C.E.; Yunjun, Z.; Simard, M. InSAR Phase Unwrapping Error Correction for Rapid Repeat Measurements of Water Level Change in Wetlands. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Yunjun, Z.; Fattahi, H.; Amelung, F. Small Baseline InSAR Time Series Analysis: Unwrapping Error Correction and Noise Reduction. Comput. Geosci. 2019, 133, 104331. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Xu, X.; Mellors, R.; Wei, M.; Tong, X.; Wessel, P. GMTSAR: An InSAR Processing System Based on Generic Mapping Tools, 2nd ed.; Scripps Institution of Oceanography: San Diego, CA, USA, 2016. [Google Scholar]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A New Method for Measuring Deformation on Volcanoes and Other Natural Terrains Using InSAR Persistent Scatterers. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Murray, K.D.; Ebinger, C.J. Active Deformation in the Central Section of the East African Rift from Tectonic, Volcanic, and Hydrologic Processes: Observations from Satellite Geodesy. J. African Earth Sci. 2024, 219, 105390. [Google Scholar] [CrossRef]
- Massé, R.P.; Needham, R.E. NEIC-The National Earthquake Information Center. Earthq. Volcanoes (USGS) 1989, 21, 4–44. [Google Scholar]
- Rinehart, E.J.; Sanford, A.R. Upper Crustal Structure of the Rio Grande Rift near Socorro, New Mexico, from Inversion of Microearthquake S-Wave Reflections. Bull. Seismol. Soc. Am. 1981, 71, 437–450. [Google Scholar]
- Balch, R.S.; Hartse, H.E.; Sanford, A.R.; Lin, K. A New Map of the Geographic Extent of the Socorro Mid-Crustal Magma Body. Bull. Seismol. Soc. Am. 1997, 87, 174–182. [Google Scholar] [CrossRef]
- Sanford, A.R.; Alptekin, Ö.; Toppozada, T.R. Use of Reflection Phases on Microearthquake Seismograms to Map an Unusual Discontinuity beneath the Rio Grande Rift. Bull. Seismol. Soc. Am. 1973, 63, 2021–2034. [Google Scholar] [CrossRef]
- Block, G.A.; Roy, M.; Graves, E.; Grapenthin, R. Pressurizing Magma Within Heterogeneous Crust: A Case Study at the Socorro Magma Body, New Mexico, USA. Geophys. Res. Lett. 2023, 50, e2023GL105689. [Google Scholar] [CrossRef]
- MacQueen, P.; Delgado, F.; Reath, K.; Pritchard, M.E.; Bagnardi, M.; Milillo, P.; Lundgren, P.; Macedo, O.; Aguilar, V.; Ortega, M.; et al. Volcano-Tectonic Interactions at Sabancaya Volcano, Peru: Eruptions, Magmatic Inflation, Moderate Earthquakes, and Fault Creep. J. Geophys. Res. Solid Earth 2020, 125, 1–25. [Google Scholar] [CrossRef]
- Aerts, J. Earthquake Relocation and Characterization Methods and Their Application to the Area Above the Socorro Magma Body in Central New Mexico and to Icequake Swarms in the Beaufort Sea; New Mexico Institute of Mining and Technology: Socorro, NM, USA, 2024. [Google Scholar]
- Tsimplis, M.N.; Woodworth, P.L. The Global Distribution of the Seasonal Sea Level Cycle Calculated from Coastal Tide Gauge Data. J. Geophys. Res. Ocean. 1994, 99, 16031–16039. [Google Scholar] [CrossRef]
- Blewitt, G.; Lavallée, D. Effect of Annual Signals on Geodetic Velocity. J. Geophys. Res. 2002, 107, ETG 9-1–ETG 9-11. [Google Scholar] [CrossRef]
- Bos, M.S.; Fernandes, R.M.S.; Williams, S.D.P.; Bastos, L. Fast Error Analysis of Continuous GNSS Observations with Missing Data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef]
- Kirui, P.K.; Reinosch, E.; Isya, N.; Riedel, B.; Gerke, M. Mitigation of Atmospheric Artefacts in Multi Temporal InSAR: A Review. PFG—J. Photogramm. Remote Sens. Geoinf. Sci. 2021, 89, 251–272. [Google Scholar] [CrossRef]
- Altamimi, Z.; Métivier, L.; Rebischung, P.; Rouby, H.; Collilieux, X. ITRF2014 Plate Motion Model. Geophys. J. Int. 2017, 209, 1906–1912. [Google Scholar] [CrossRef]
- Kreemer, C.; Klein, E.; Shen, Z.K.; Wang, M.; Estey, L.; Wier, S.; Boler, F. A Geodetic Plate Motion and Global Strain Rate Model. Geochem. Geophys. Geosyst. 2014, 15, 3849–3889. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Reference Station | Secondary Station | (mm) | (mm) | Prob (4 mm > a) | Prob (8 mm > a) | Prob (7 mm > a) | Prob (12 mm > a) |
|---|---|---|---|---|---|---|---|---|
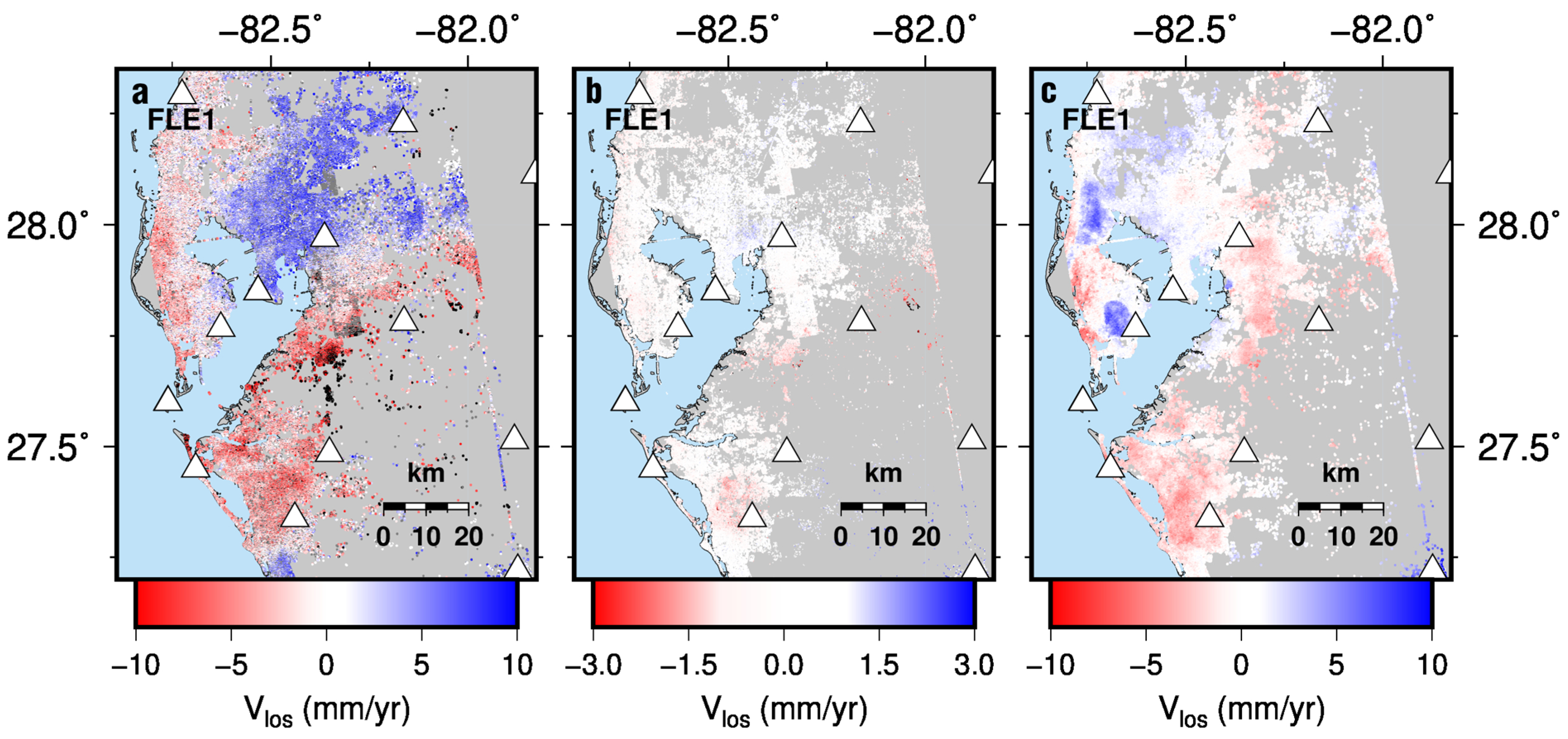
| Tampa Bay Area | FLD7 | FLIB | −2 | 26 | 60% | 65% | 63% | 71% |
| STP3 | FLIB | −2 | 23 | 62% | 68% | 65% | 74% | |
| FLD7 | STP3 | −1 | 23 | 59% | 66% | 63% | 72% | |
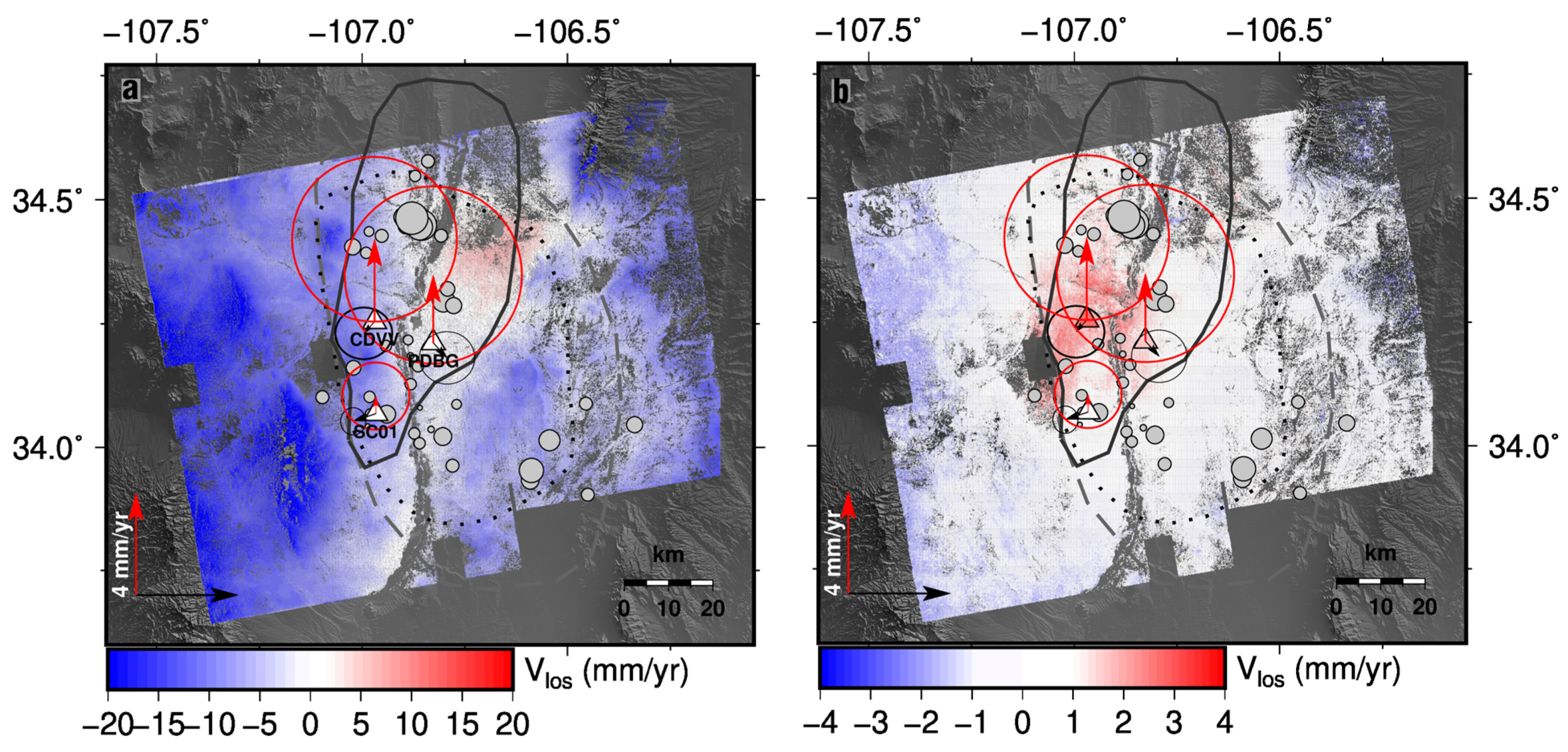
| Socorro | CDVV | PDBG | 0 | 8 | 72% | 86% | 81% | 95% |
| CDVV | SC01 | 2 | 16 | 56% | 65% | 61% | 74% | |
| SC01 | PDBG | −3 | 18 | 66% | 73% | 70% | 80% | |
| NMBL | CDVV | 2 | 14 | 56% | 67% | 62% | 77% | |
| Western Nicaragua | MANA | ELMA | −1 | 26 | 59% | 64% | 62% | 70% |
| MANA | LEME | −3 | 30 | 59% | 64% | 62% | 69% | |
| ELMA | LEME | 1 | 22 | 56% | 63% | 60% | 70% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Higgins, M.; Wdowinski, S. InSAR Detection of Slow Ground Deformation: Taking Advantage of Sentinel-1 Time Series Length in Reducing Error Sources. Remote Sens. 2025, 17, 2420. https://doi.org/10.3390/rs17142420
Higgins M, Wdowinski S. InSAR Detection of Slow Ground Deformation: Taking Advantage of Sentinel-1 Time Series Length in Reducing Error Sources. Remote Sensing. 2025; 17(14):2420. https://doi.org/10.3390/rs17142420
Chicago/Turabian StyleHiggins, Machel, and Shimon Wdowinski. 2025. "InSAR Detection of Slow Ground Deformation: Taking Advantage of Sentinel-1 Time Series Length in Reducing Error Sources" Remote Sensing 17, no. 14: 2420. https://doi.org/10.3390/rs17142420
APA StyleHiggins, M., & Wdowinski, S. (2025). InSAR Detection of Slow Ground Deformation: Taking Advantage of Sentinel-1 Time Series Length in Reducing Error Sources. Remote Sensing, 17(14), 2420. https://doi.org/10.3390/rs17142420