

Retrieving Inland Water Quality Parameters via Satellite Remote Sensing: Sensor Evaluation, Atmospheric Correction, and Machine Learning Approaches




Abstract
1. Introduction
- A spatial resolution sufficient for the size of the targeted inland water bodies, which vary from large lakes to narrow rivers;
- A high radiometric sensitivity and Signal-to-Noise Ratio (SNR) to capture weak water-leaving radiance/reflectance;
- Spectral bands that are sensitive to variations in WQPs;
- Frequent temporal coverage to capture the dynamic nature of inland waters;
- Design features such as a tilting mechanism to minimize sun glint effects (the specular reflection of direct sunlight from the water surface [14]).
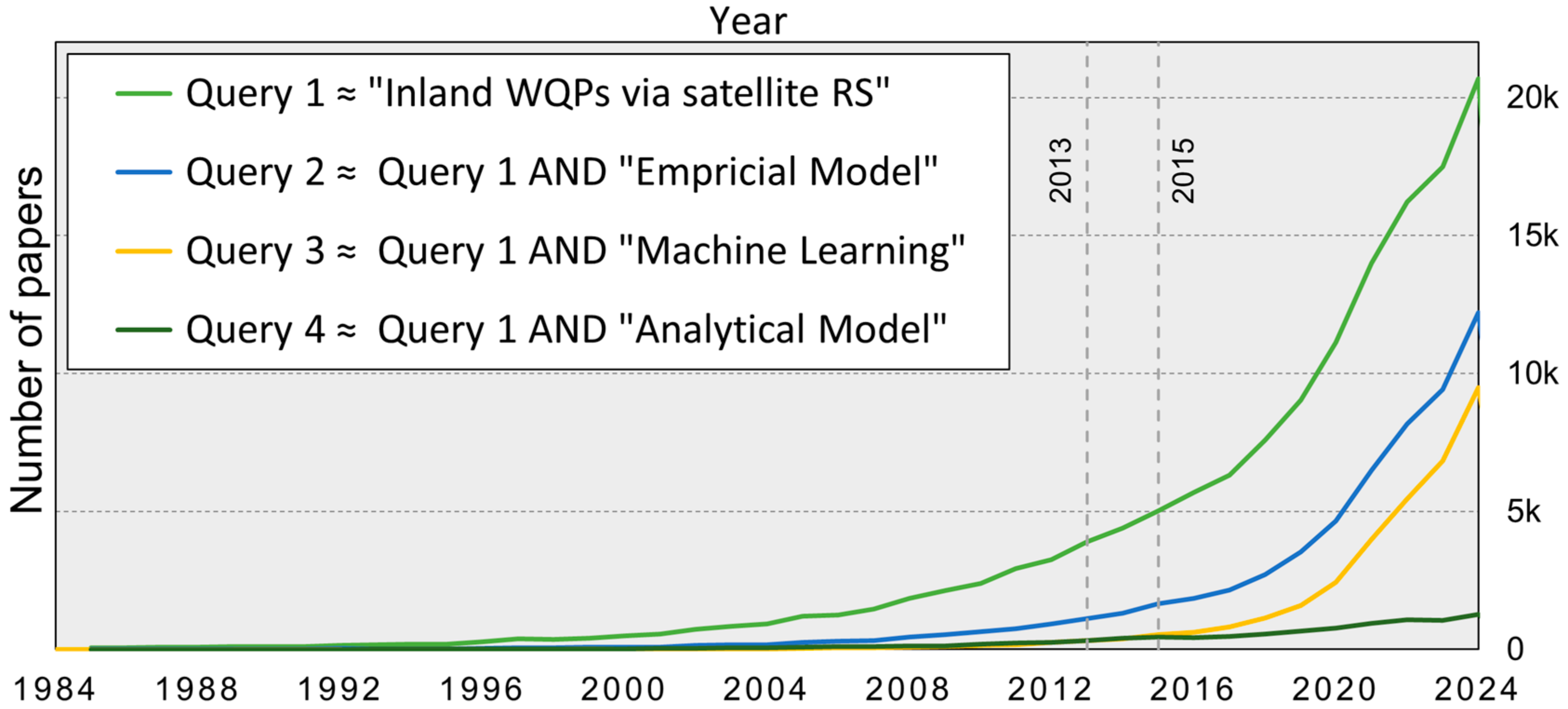
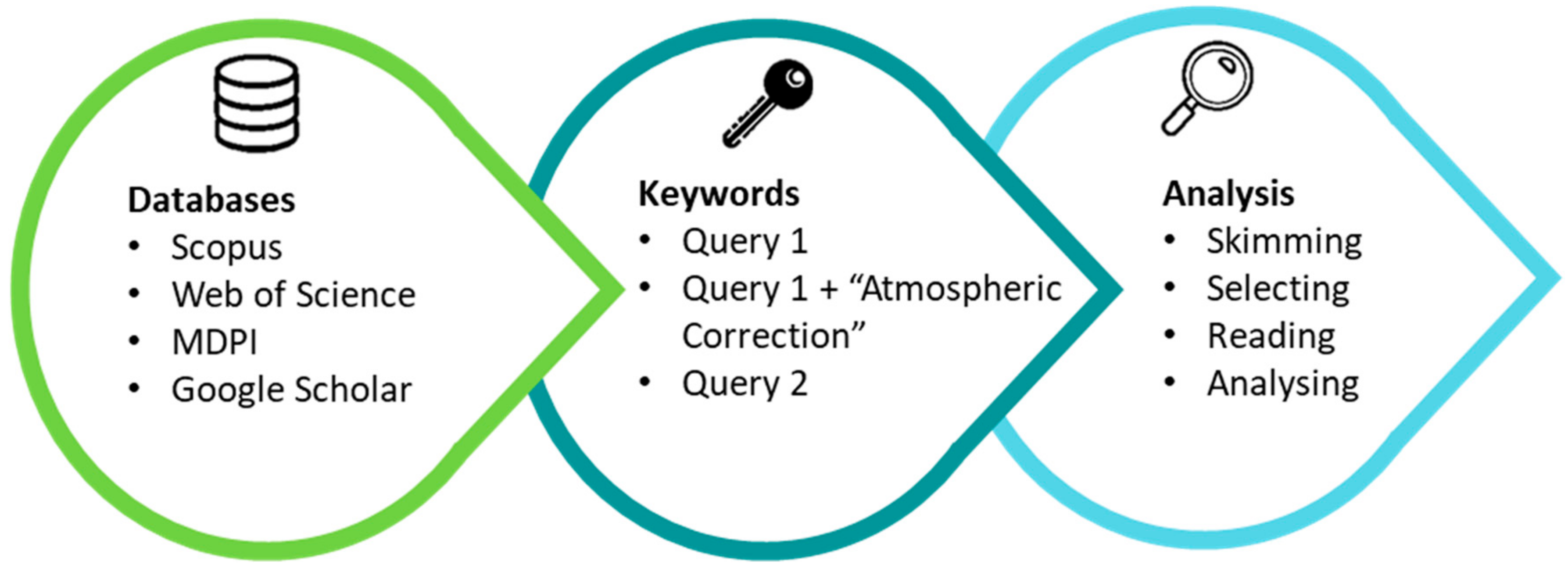
2. Methodology for Article Selection and Filtering
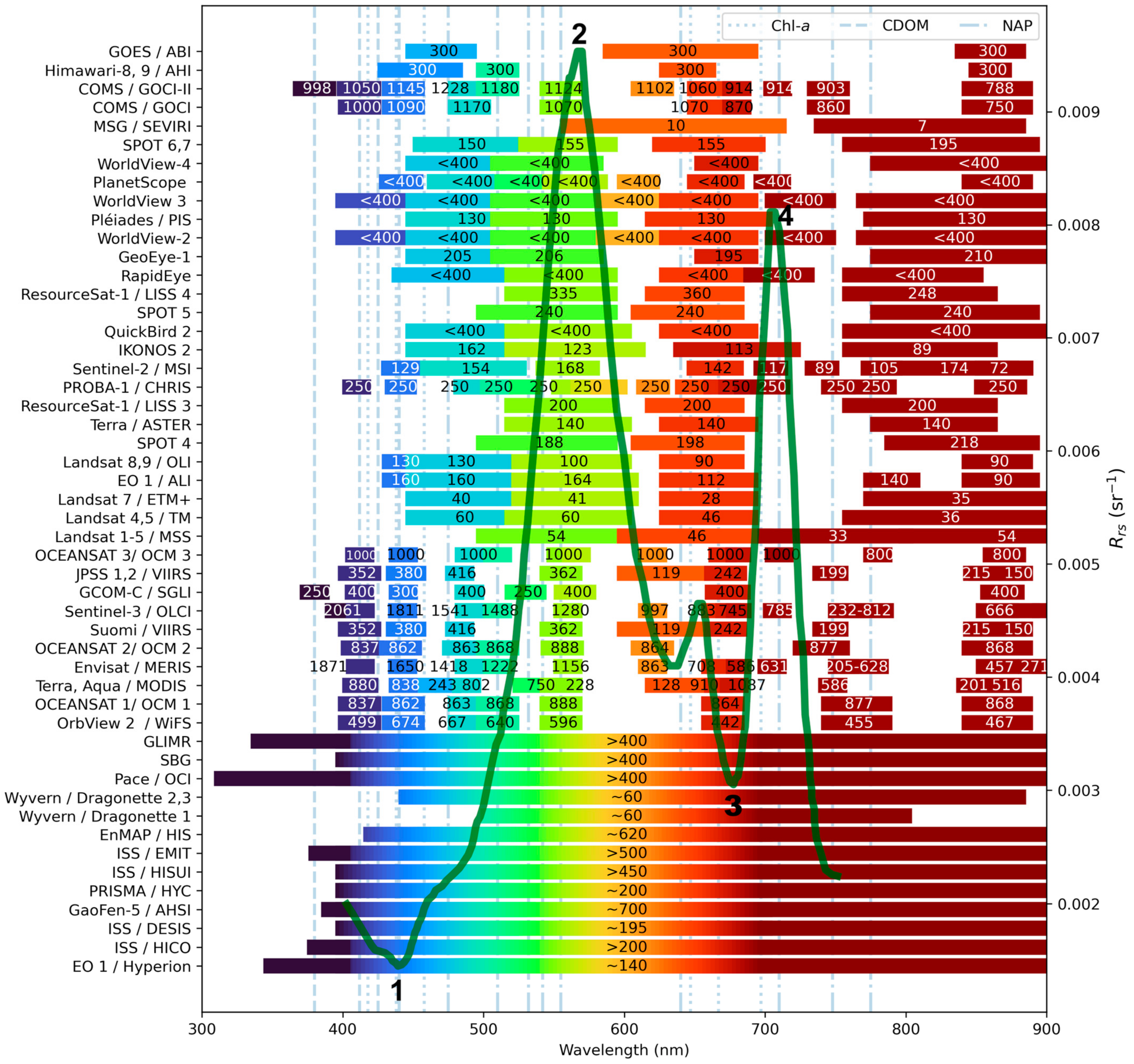
3. Earth Observation Satellite Sensors for Modeling WQPs in Inland Waters
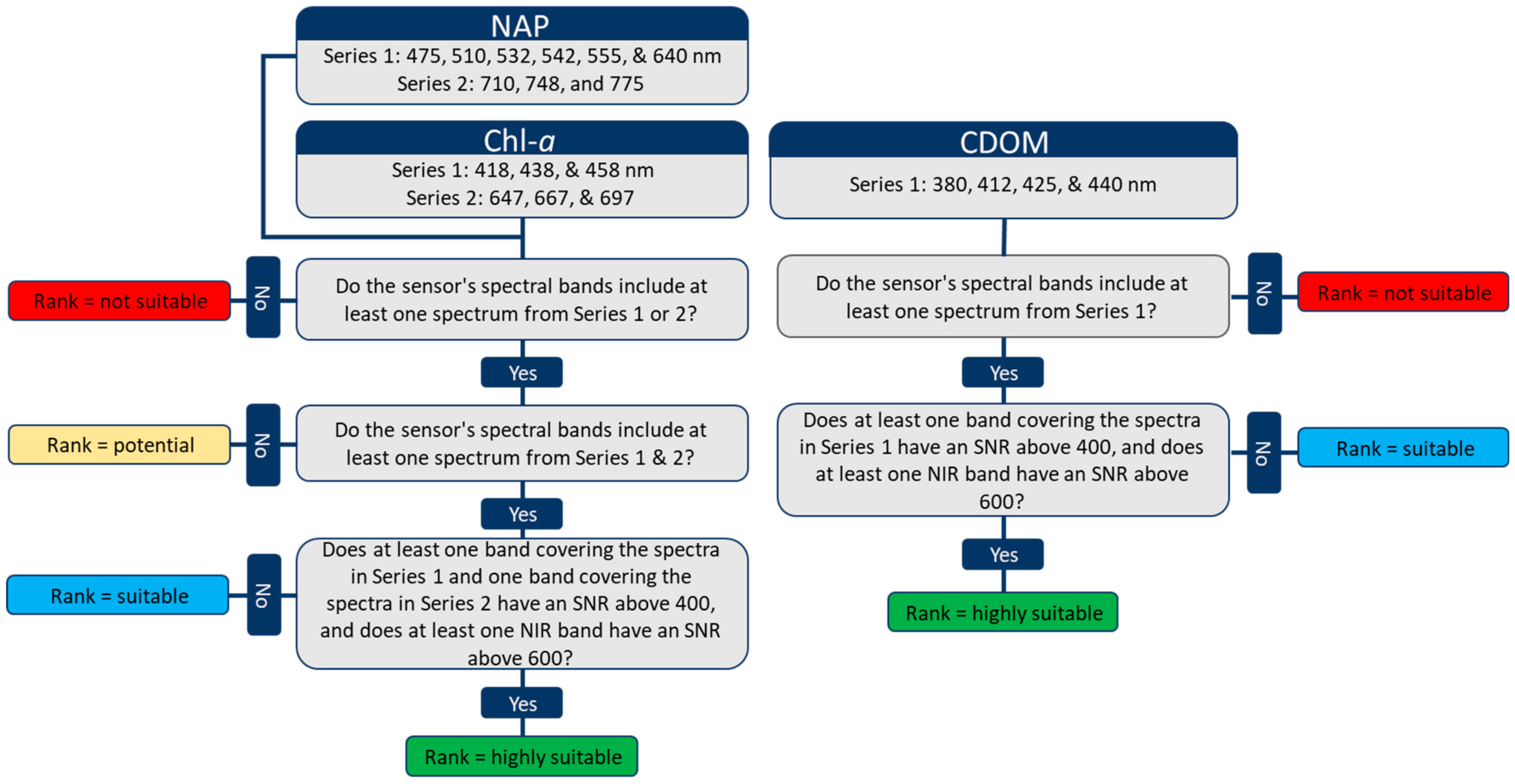
Ranking Satellite Sensors for Retrieving Chl-a, CDOM, and NAP

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Satellite/Sensor | Spatial Res. (m) | Spectral Res. between ~400–900 (nm) (Number of Bands) | SWIR Band | Temporal Res. (Days) | Data Record Period (Year) | Data Cost | WQPs | ||
|---|---|---|---|---|---|---|---|---|---|---|
| CDOM | Chl-a | NAP | ||||||||
| Ocean-Color | OrbView-2/SeaWiFS | 1100 | 402–885 (8) | ✗ | 1–2 | 1997–2010 | Free |  | | |
| OCEANSAT 1/OCM 1 | 360 | 402–885 (8) | ✗ | 2 | 1999–2010 | Free |  | | | |
| Terra, Aqua/MODIS | 250, 500, 1k | 405–877 (13) | ✓ | 1–2 | 1999–now | Free | | | | |
| Envisat/MERIS | 300 | 407–905 (15) | ✗ | 2–3 | 2002–2012 | Free | | | | |
| OCEANSAT 2/OCM 2 | 360 | 404–885 (8) | ✗ | 2 | 2009–2022 | Free | |  | | |
| Suomi/VIIRS | 375, 750 | 402–885 (9) | ✓ | 1 | 2011–2018 | Free | | | | |
| Sentinel 3/OLCI | 300 | 392–905 (19) | ✓ | 2–3 | 2016–now | Free | | | | |
| GCOM-C/SGLI | 250 | 374–878 (8) | ✓ | 2–4 | 2017–2022 | Free | | | | |
| JPSS 1,2/VIIRS | 375, 750 | 402–885 (9) | ✓ | 1 | 2011–2018 | Free | | | | |
| OCEANSAT 3/OCM 3 | 360, 1080 | 407–880 (12) | ✓ | 2 | 2022–now | Free | | | | |
| Pace/OCI | 1200 | 314–895 (280) | ✓ | 1–2 | 2024–now | Free | | | | |
| SBG | 30 | 400–2500 (63) | ✓ | 16 | 2028 | Free | | | | |
| GLIMR | 300 | 340–1040 (250) | ✓ | 4 h | 2026 | Free | | | | |
| Hyperspectral | EO-1/Hyperion | 60 | 349–896 (60) | ✓ | 16 | 2000–2017 | Free | | | |
| ISS/HICO | 90 | 380–960 (100) | ✓ | ~3 | 2009–2014 | Free | | | | |
| ISS/DESIS | 30 | 400–1000 (235) | ✓ | 3–5 | 2018–2023 | Free? | | | | |
| GaoFen-5/AHSI | 30 | 390–900 (100) | ✓ | 5 | 2018–now | Free? | | | | |
| PRISMA/HYC | 30 | 400–1010 (66) | ✓ | 29 | 2019–now | Free? | | | | |
| ISS/HISUI | 30 | 400–970 (60) | ✓ | 2–60 | 2019–2023 | Free? | | | | |
| ISS/EMIT | 60 | 381–1001 (84) | ✓ | ~1 | 2022–now | Free | | | | |
| EnMAP/HIS | 30 | 420–900 (90) | ✓ | 4, 27 | 2022–now | Free? | | | | |
| Wyvern/Dragonette 1 | 5.3 | 503–799 (23) | ✗ | ~2 | 2023–now | Charge |  | | | |
| Wyvern/Dragonette 2,3 | 5.3 | 445–880 (32) | ✗ | ~2 | 2023–now | Charge | | | | |
| Mid Spatial Resolution | Landsat 1–5/MSS | 60 | 500–1100 (4) | ✗ | 16 | 1972–2013 | Free | | | |
| Landsat 4,5/TM | 30 | 450–900 (4) | ✓ | 16 | 1982–2013 | Free | | | | |
| SPOT 4 | 20 | 500–890 (3) | ✓ | 26 | 1998–2013 | Charge | | | | |
| Terra/ASTER | 15 | 520–860 (3) | ✓ | 16 | 1999-now | Free | | | | |
| Landsat 7/ETM+ | 30 | 450–900 (4) | ✓ | 16 | 1999–2022 | Free | | | | |
| EO 1/ALI | 30 | 433–890 (6) | ✓ | 16 | 2000–2017 | Free | | | | |
| PROBA-1/CHRIS | 18 | 405–880 (17) | ✓ | 7 | 2001–2021 | Free | | | | |
| ResourceSat-1/LISS 3 | 23.5 | 520–860 (3) | ✓ | 24 | 2003–2013 | Free? | | | | |
| Landsat 8,9/OLI | 30 | 433–885 (5) | ✓ | 16 | 2013–now | Free | | | | |
| Sentinel-2/MSI | 10, 20, 60 | 442–875 (9) | ✓ | 5 | 2015–now | Free | | | | |
| High Spatial Resolution | IKONOS 2 | 4 | 450–860(4) | ✗ | 3 | 1999–2015 | Charge | | | |
| QuickBird 2 | 2.4 | 450–900 (4) | ✗ | 3 | 2001–2015 | Charge | | | | |
| SPOT 5 | 10 | 500–890 (3) | ✓ | 26 | 2002–2015 | Charge | | | | |
| ResourceSat-1/LISS 4 | 5.8 | 520–860 (3) | ✗ | 24 | 2003–2013 | Free? | | | | |
| RapidEye | 6.5 | 440–850 (5) | ✗ | 1 | 2008–2020 | Charge | | | | |
| GeoEye-1 | 1.64 | 450–920 (4) | ✗ | 4 | 2008–now | Charge | | | | |
| WorldView 2 | 1.8 | 400–1040 (8) | ✗ | 1 | 2009–now | Charge | | | | |
| Pléiades/HiRI | 2 | 450–915 (4) | ✗ | 1 | 2011–now | Charge | | | | |
| WorldView 3 | 1.24 | 400–1040 (8) | ✓ | 1 | 2014–now | Charge | | | | |
| PlanetScope | 3 | 431–885 (8) | ✗ | 1 | 2014–2023 | Charge | | | | |
| WorldView 4 | 1.24 | 450–920 (4) | ✗ | 1 | 2016–now | Charge | | | | |
| SPOT 6,7 | 6 | 455–890 (4) | ✗ | 26 | 2021–now | Charge | | | | |
| Geostationary | MSG/SEVIRI | 1000 | 560–880 (2) | ✗ | 15 min | 2002–now | Free | | | |
| COMS/GOCI | 500 | 402–885 (8) | ✗ | 1 h | 2010–2021 | Free | | | | |
| COMS/GOCI-II | 250 | 370–885 (12) | ✗ | 1 h | 2020–now | Free | | | | |
| Himawari-8, 9/AHI | 1000 | 430–870 (4) | ✓ | 10 min | 2014–now | Free | | | | |
| GOES/ABI | 1000 | 450–880 (3) | ✓ | 10 min | 2016–now | Free | | | | |
4. Atmospheric Correction for Inland Waters
- Light from surrounding land areas or floating objects can reflect into the sensor’s view, causing non-negligible water reflectance in the NIR region. This interference disrupts AC algorithms that use NIR to derive the aerosol type and optical thickness, potentially resulting in overcorrection of Rrs in visible wavelengths [3,58,59].
- The atmosphere over inland waters is often heterogeneous due to atmospheric advection and pollution from terrestrial sources.
- Inland waters typically exhibit high turbidity, leading to non-negligible reflectance in the NIR and even SWIR bands.
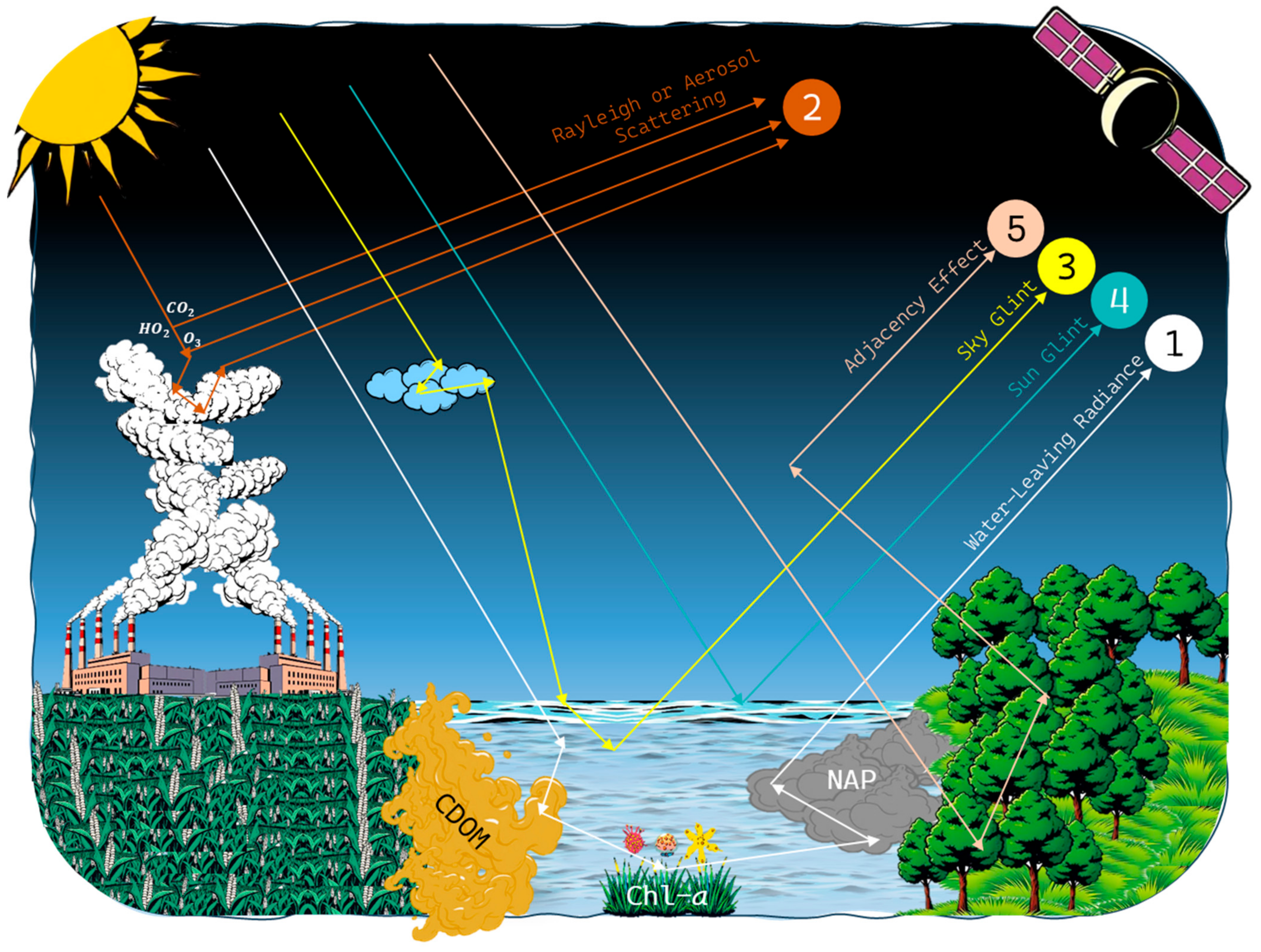
4.1. Additive and Multiplicative Atmospheric Effects
4.2. Sun Glint and Air–Water Interface Correction
4.3. Water Vapor Absorption, Rayleigh Scattering, and Gas Absorption
4.4. Aerosol Contributions
- Using the SWIR black-pixel assumption for wavelengths like 1240, 1640, and 2130 nm to retrieve aerosol contributions [90]. The AC for the Operational Land Imager lite (ACOLITE) exponential extrapolation mode [50] employs this approach. However, SWIR bands often have a low SNR, especially in sensors designed for land observation like the Operational Land Imager (OLI); this can be improved by a spatially averaged filter [91] or by using a cross-calibration method from less turbid waters [92]. Additionally, not all sensors have a SWIR band. For example, as shown in Table 2, 20 out of 50 sensors lack a SWIR band, which limits the use of this approach.
- Modeling marine contributions to NIR bands, a method critical for sensors like the Sea-viewing Wide Field-of-view Sensor (SeaWiFS), Medium Resolution Imaging Spectrometer (MERIS), and Geostationary Ocean Color Imager (GOCI), which lack SWIR bands. Marine contributions to NIR can be modeled by identifying the aerosol type over clear waters and transferring it to turbid waters using the nearest neighbor approach [58]. Another method involves using a bio-optical model to estimate the backscattering of particles in the NIR band from the backscattering of particles in the green band (e.g., 670 nm) and subsequently calculating the water-leaving radiance in the NIR, after which the NIR black-pixel assumption AC algorithm is applied [93]. Alternatively, aerosol scattering in NIR bands can be calculated by assuming spatial homogeneity in the NIR band ratios for aerosol and water-leaving reflectance [59].
- Combining or switching between NIR and SWIR bands is a method where turbid pixels are processed using the SWIR-based AC algorithms, while non-turbid pixels are handled with the NIR-based AC algorithms. This method has been applied in the SeaDAS [94] and the Level 2 generator (L2gen) [90]. However, the success of L2gen depends on accurately determining the aerosol type.
4.5. Adjacency Effect
4.6. Comparison of Atmospheric Correction Algorithms for OLI and MSI Sensors
5. Machine Learning Models for Retrieving Water Quality Parameters
- Statistical models, which include linear models like ordinary least squares regression and non-linear models like generalized additive models;
- Kernel-based models, such as support vector regression, which operate by mapping input variables into higher-dimensional feature spaces using a kernel function;
- Tree-based models, such as Decision Trees (DTs), which are structured hierarchically, with each node representing a decision based on a specific feature;
- NN models, such as multilayer perceptrons, which process raw data through multiple layers, each transforming the data into more abstract representations than the previous layer.
5.1. Improving Accuracy and Generalization in Machine Learning
5.2. Challenges and Solutions for Addressing Spatial and Temporal Autocorrelation in Machine Learning Models
5.3. Enhancing Dimensionality in Inland Water Remote Sensing
6. Conclusions
- Not all sensors are suitable for retrieving Chl-a, CDOM, and NAP concentrations. Before initiating modeling, it is important to address whether the selected sensor can effectively model the target WQP (Table 2). Leveraging a multi-sensor integration strategy - especially combining sensors with complementary strengths - can help overcome individual limitations.
- High spatial resolution sensors may lack the necessary spectral resolution and SNR for inland WQP estimation, but they are the only option for small inland waters.
- The Surface Biology and Geology (SBG) sensor, set to launch in 2028, is highly suitable for modeling Chl-a, NAP, and CDOM concentrations (Table 2). It has spatial and temporal resolutions similar to the Landsat OLI but offers higher spectral resolution, an improved SNR, and a tilting mechanism to minimize sun glint, making it highly suitable for inland WQP monitoring. However, its performance remains to be validated once operational data become available.
- No AC algorithm has consistently outperformed others across all atmospheric and water conditions. Therefore, it is important to evaluate the suitability of a given algorithm for the specific sensor, water type, and atmospheric context before implementation. Moreover, although new AE correction methods have been proposed in recent research, their performance has not been thoroughly evaluated.
- Recent studies demonstrate that ensemble methods achieve higher accuracy and robustness compared to single machine learning models.
- Locally trained ML models generally outperform globally trained ones when evaluated within the same region the local model was trained on. This is because ML models tend to perform poorly in regions where they have not been calibrated, due to differences in atmospheric conditions or variations in WQP concentrations between the training data and the target area.
- Addressing the impact of spatial and temporal autocorrelation in WQP modeling is important, particularly when using data-driven models, as it can result in biased estimates and unreliable conclusions. Additionally, identifying spatial patterns in residuals is key to assessing whether the model has captured all spatial dependencies in the data.
- Ensuring the prevention of information leakage during the separation of training and test data is necessary for reliable performance evaluation. Such leakage can lead to inflated performance estimates and undermine the validity of the results. Methods like spatial/temporal cross-validation, checkerboard evaluation, and buffered cross-validation help mitigate the risk of information leakage.
- Increasing data dimensionality through the integration of auxiliary variables—such as meteorological parameters—can improve the performance of ML models. This approach compensates for the limited spectral and spatial information typically available in inland water RS and allows models to capture more complex patterns. However, this may lead to overfitting if cross-validation and regularization techniques are not properly applied.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SeaWiFS | Sea-viewing Wide Field-of-view Sensor |
| OCM | Ocean Color Monitor |
| JPSS | Joint Polar Satellite System |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| OLCI | Ocean and Land Color Instrument |
| SGLI | Second Generation Global Imager |
| OCI | Ocean Color Imager |
| GLIMR | Geostationary Littoral Imaging and Monitoring Radiometer |
| HICO | Hyperspectral Imager for the Coastal Ocean |
| AHI | Advanced Himawari Imager |
| AHSI | Advanced Hyperspectral Imager |
| HYC | Hyperspectral Camera |
| COMS | Communication, Ocean, and Meteorological Satellite |
| EMIT | Earth Surface Mineral Dust Source Investigation |
| MSS | Multispectral Scanner |
| TM | Thematic Mapper |
| ASTER | Advanced Spaceborne Thermal Emission and Reflection Radiometer |
| ETM+ | Enhanced Thematic Mapper Plus |
| ALI | Advanced Land Imager |
| CHRIS | Compact High Resolution Imaging Spectrometer |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| SPOT | Satellite Pour l’Observation de la Terre |
| MSI | Multispectral Imager |
| HiRI | High Resolution Imager |
| SEVIRI | Spinning Enhanced Visible and InfraRed Imager |
| GOCI | Geostationary Ocean Color Imager |
| OLI | Operational Land Imager |
| ABI | Advanced Baseline Imager |
| MERIS | Medium Resolution Imaging Spectrometer |
| PACE | Plankton, Aerosol, Cloud, ocean Ecosystem |
| SBG | Surface Biology and Geology |
| EO | Earth Observing |
| ISS | International Space Station |
| EnMAP | Environmental Mapping and Analysis Program |
| LISS | Linear Imaging and Self-Scanning Sensor |
| MSG | Meteosat Second Generation |
| HISUI | Hyperspectral Imager Suite |
| GOES | Geostationary Operational Environmental Satellite |
| PROBA | Project for On-Board Autonomy |
| HIS | Hyperspectral Imager |
| DESIS | DLR Earth Sensing Imaging Spectrometer |
Appendix A
- Query 1: (“inland water*” OR “river*” OR “lake*” OR “reservoir*” OR “wetland*” OR “freshwater” OR “estuary*” OR “aquatic system*”) AND (“remote sensing” OR “satellite imagery” OR “Earth observation” OR “hyperspectral imaging” OR “multispectral imaging”) AND (“water quality” OR “turbidity” OR “chlorophyll*” OR “total suspended solid*” OR “total dissolved solid*” OR “salinity” OR “colored dissolved organic matter” OR “dissolved organic carbon” OR “particulate organic carbon” OR “electrical conductivity” OR “Secchi disk depth” OR “eutrophication” OR “harmful algal bloom*” OR “phytoplankton” OR “cyanobacteria” OR “non-algal particle*” OR “water transparency” OR “biogeochemical cycle*” OR “optically active constituent*” OR “optically inactive constituent*” OR “non-optically active constituent*”);
- Query 2: (“empirical model*” OR “data-driven model*” OR “statistical model*” OR “supervised learning” OR “unsupervised learning” OR “regression” OR “machine learning” OR “deep learning” OR “statistical analysis” OR “linear regression” OR “Bayesian” OR “ensemble learning “);
- Query 3: (“machine learning” OR “deep learning” OR “Bayesian” OR “ensemble learning “);
- Query 4: (“physical model*” OR “mechanistic model*” OR “analytical model*” OR “semi-analytical model*” OR “quasi-analytical model*” OR “radiative transfer model*” OR “radiative transfer code*” OR “radiative transfer equation*”).
References
- Likens, G.E. Inland Waters. In Encyclopedia of Inland Waters; Academic Press: Oxford, UK, 2009; pp. 1–5. ISBN 978-0-12-370626-3. [Google Scholar]
- Bastviken, D.; Tranvik, L.J.; Downing, J.A.; Crill, P.M.; Enrich-Prast, A. Freshwater Methane Emissions Offset the Continental Carbon Sink. Science 2011, 331, 50. [Google Scholar] [CrossRef] [PubMed]
- Mishra, D.R.; Ogashawara, I.; Gitelson, A.A. Bio-Optical Modeling and Remote Sensing of Inland Waters; Elsevier: Amsterdam, The Netherlands, 2017; ISBN 978-0-12-804654-8. [Google Scholar]
- United Nations. The United Nations World Water Development Report 2023: Partnerships and Cooperation for Water; UNESCO: Paris, France, 2023. [Google Scholar]
- Franco; Granados, E.; Kuritzky, M.; Lukacs, R.; Zahidi, S. The Global Risks Report 2020; World Economic Forum: Cologny, Switzerland, 2020. [Google Scholar]
- Mueller, J.T.; Gasteyer, S. The Widespread and Unjust Drinking Water and Clean Water Crisis in the United States. Nat. Commun. 2021, 12, 3544. [Google Scholar] [CrossRef] [PubMed]
- Barati, A.A.; Pour, M.D.; Sardooei, M.A. Water Crisis in Iran: A System Dynamics Approach on Water, Energy, Food, Land and Climate (WEFLC) Nexus. Sci. Total Environ. 2023, 882, 163549. [Google Scholar] [CrossRef]
- Getirana, A.; Libonati, R.; Cataldi, M. Brazil Is in Water Crisis—It Needs a Drought Plan. Nature 2021, 600, 218–220. [Google Scholar] [CrossRef]
- Christodoulou, A.; Christidis, P.; Bisselink, B. Forecasting the Impacts of Climate Change on Inland Waterways. Transp. Res. Part Transp. Environ. 2020, 82, 102159. [Google Scholar] [CrossRef]
- Yao, S.; Chen, C.; He, M.; Cui, Z.; Mo, K.; Pang, R.; Chen, Q. Land Use as an Important Indicator for Water Quality Prediction in a Region under Rapid Urbanization. Ecol. Indic. 2023, 146, 109768. [Google Scholar] [CrossRef]
- Parmar, T.K.; Rawtani, D.; Agrawal, Y.K. Bioindicators: The Natural Indicator of Environmental Pollution. Front. Life Sci. 2016, 9, 110–118. [Google Scholar] [CrossRef]
- Klemas, V. Remote Sensing of Algal Blooms: An Overview with Case Studies. J. Coast. Res. 2011, 28, 34–43. [Google Scholar] [CrossRef]
- National Research Council. The Drama of the Commons; National Academies Press: Washington, DC, USA, 2002; ISBN 978-0-309-08250-1. [Google Scholar]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring Inland Water Quality Using Remote Sensing: Potential and Limitations of Spectral Indices, Bio-Optical Simulations, Machine Learning, and Cloud Computing. Earth-Sci. Rev. 2020, 205, 103187. [Google Scholar] [CrossRef]
- Declaro, A.; Kanae, S. Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR. Remote Sens. 2024, 16, 3329. [Google Scholar] [CrossRef]
- International Ocean-Colour Coordinating Group (IOCCG). Atmospheric Correction for Remotely-Sensed Ocean-Colour Products; IOCCG Report Series; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2010. [Google Scholar]
- International Ocean-Colour Coordinating Group (IOCCG). Earth Observations in Support of Global Water Quality Monitoring; IOCCG Report Series; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2018. [Google Scholar]
- Smith, R.C.; Baker, K.S. The Bio-Optical State of Ocean Waters and Remote Sensing. Limnol. Oceanogr. 1978, 23, 247–259. [Google Scholar] [CrossRef]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A Comprehensive Review on Water Quality Parameters Estimation Using Remote Sensing Techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef]
- Tesfaye, A. Remote Sensing-Based Water Quality Parameters Retrieval Methods: A Review. East Afr. J. Environ. Nat. Resour. 2024, 7, 80–97. [Google Scholar] [CrossRef]
- Vakili, T.; Amanollahi, J. Determination of Optically Inactive Water Quality Variables Using Landsat 8 Data: A Case Study in Geshlagh Reservoir Affected by Agricultural Land Use. J. Clean. Prod. 2020, 247, 119134. [Google Scholar] [CrossRef]
- Chen, L.; Liu, L.; Liu, S.; Shi, Z.; Shi, C. The Application of Remote Sensing Technology in Inland Water Quality Monitoring and Water Environment Science: Recent Progress and Perspectives. Remote Sens. 2025, 17, 667. [Google Scholar] [CrossRef]
- Matthews, M.W. A Current Review of Empirical Procedures of Remote Sensing in Inland and Near-Coastal Transitional Waters. Int. J. Remote Sens. 2011, 32, 6855–6899. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, Y.; Pan, D.; Yang, S.X.; Gharabaghi, B. Review of Recent Advances in Remote Sensing and Machine Learning Methods for Lake Water Quality Management. Remote Sens. 2024, 16, 4196. [Google Scholar] [CrossRef]
- Elmotawakkil, A.; Enneya, N.; Bhagat, S.K.; Ouda, M.M.; Kumar, V. Advanced Machine Learning Models for Robust Prediction of Water Quality Index and Classification. J. Hydroinformatics 2025, 27, 299–319. [Google Scholar] [CrossRef]
- Koldasbayeva, D.; Tregubova, P.; Gasanov, M.; Zaytsev, A.; Petrovskaia, A.; Burnaev, E. Challenges in Data-Driven Geospatial Modeling for Environmental Research and Practice. Nat. Commun. 2024, 15, 10700. [Google Scholar] [CrossRef]
- Gray, P.C.; Boss, E.; Prochaska, J.X.; Kerner, H.; Demeaux, C.B.; Lehahn, Y. The Promise and Pitfalls of Machine Learning in Ocean Remote Sensing. Oceanography 2024, 37, 52–63. [Google Scholar] [CrossRef]
- Liu, X.; Kounadi, O.; Zurita-Milla, R. Incorporating Spatial Autocorrelation in Machine Learning Models Using Spatial Lag and Eigenvector Spatial Filtering Features. ISPRS Int. J. Geo-Inf. 2022, 11, 242. [Google Scholar] [CrossRef]
- Cao, Z.; Ma, R.; Duan, H.; Xue, K. Effects of Broad Bandwidth on the Remote Sensing of Inland Waters: Implications for High Spatial Resolution Satellite Data Applications. ISPRS J. Photogramm. Remote Sens. 2019, 153, 110–122. [Google Scholar] [CrossRef]
- Dekker, A.G.; Pinnel, N.; Gege, P.; Briottet, X.; Court, A.; Peters, S.; Turpie, K.R.; Sterckx, S.; Costa, M.; Giardino, C.; et al. Feasibility Study for an Aquatic Ecosystem Earth Observing System Version 1.2. In Feasibility Study for an Aquatic Ecosystem Earth Observing System; CEOS: Rapid City, SD, USA, 2018. [Google Scholar]
- Fu, B.; Li, S.; Lao, Z.; Wei, Y.; Song, K.; Deng, T.; Wang, Y. A Novel Hierarchical Approach to Insight to Spectral Characteristics in Surface Water of Karst Wetlands and Estimate Its Non-Optically Active Parameters Using Field Hyperspectral Data. Water Res. 2024, 257, 121673. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, W.; Cao, X.; He, B.; Feng, Q.; Yang, F.; Liu, H.; Kutser, T.; Xu, M.; Xiao, F.; et al. Spatial-Temporal Distribution of Labeled Set Bias Remote Sensing Estimation: An Implication for Supervised Machine Learning in Water Quality Monitoring. Int. J. Appl. Earth Obs. Geoinf. 2024, 131, 103959. [Google Scholar] [CrossRef]
- D’Sa, E.J.; Hu, C.; Muller-Karger, F.E.; Carder, K.L. Estimation of Colored Dissolved Organic Matter and Salinity Fields in Case 2 Waters Using SeaWiFS: Examples from Florida Bay and Florida Shelf. J. Earth Syst. Sci. 2002, 111, 197–207. [Google Scholar] [CrossRef]
- Siddorn, J.R.; Bowers, D.G.; Hoguane, A.M. Detecting the Zambezi River Plume Using Observed Optical Properties. Mar. Pollut. Bull. 2001, 42, 942–950. [Google Scholar] [CrossRef]
- Blough, N.V.; Zafiriou, O.C.; Bonilla, J. Optical Absorption Spectra of Waters from the Orinoco River Outflow: Terrestrial Input of Colored Organic Matter to the Caribbean. J. Geophys. Res. Ocean. 1993, 98, 2271–2278. [Google Scholar] [CrossRef]
- Ansari, M.; Knudby, A.; Homayouni, S. River Salinity Mapping through Machine Learning and Statistical Modeling Using Landsat 8 OLI Imagery. Adv. Space Res. 2025, 75, 6981–7002. [Google Scholar] [CrossRef]
- Adjovu, G.E.; Stephen, H.; James, D.; Ahmad, S. Measurement of Total Dissolved Solids and Total Suspended Solids in Water Systems: A Review of the Issues, Conventional, and Remote Sensing Techniques. Remote Sens. 2023, 15, 3534. [Google Scholar] [CrossRef]
- Khadim, F.K.; Su, H.; Xu, L. A Spatially Weighted Optimization Model (SWOM) for Salinity Mapping in Florida Bay Using Landsat Images and in Situ Observations. Phys. Chem. Earth Parts ABC 2017, 101, 86–101. [Google Scholar] [CrossRef]
- Lavery, P.; Pattiaratchi, C.; Wyllie, A.; Hick, P. Water Quality Monitoring in Estuarine Waters Using the Landsat Thematic Mapper. Remote Sens. Environ. 1993, 46, 268–280. [Google Scholar] [CrossRef]
- Gurlin, D. Near Infrared-Red Models for the Remote Estimation of Chlorophyll-α Concentration in Optically Complex Turbid Productive Waters: From in Situ Measurements to Aerial Imagery. Ph.D. Thesis, University of Nebraska—Lincoln, Lincoln, NE, USA, 2012. [Google Scholar]
- Wolanin, A.; Soppa, M.A.; Bracher, A. Investigation of Spectral Band Requirements for Improving Retrievals of Phytoplankton Functional Types. Remote Sens. 2016, 8, 871. [Google Scholar] [CrossRef]
- Gilerson, A.; Zhou, J.; Hlaing, S.; Ioannou, I.; Gross, B.; Moshary, F.; Ahmed, S. Fluorescence Component in the Reflectance Spectra from Coastal Waters. II. Performance of Retrieval Algorithms. Opt. Express 2008, 16, 2446–2460. [Google Scholar] [CrossRef]
- Ruddick, K.G.; De Cauwer, V.; Park, Y.-J.; Moore, G. Seaborne Measurements of near Infrared Water-Leaving Reflectance: The Similarity Spectrum for Turbid Waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef]
- Babin, M.; Stramski, D.; Ferrari, G.M.; Claustre, H.; Bricaud, A.; Obolensky, G.; Hoepffner, N. Variations in the Light Absorption Coefficients of Phytoplankton, Nonalgal Particles, and Dissolved Organic Matter in Coastal Waters around Europe. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef]
- Gordon, H.R. Removal of Atmospheric Effects from Satellite Imagery of the Oceans. Appl. Opt. 1978, 17, 1631–1636. [Google Scholar] [CrossRef]
- Moses, W.J.; Bowles, J.H.; Lucke, R.L.; Corson, M.R. Impact of Signal-to-Noise Ratio in a Hyperspectral Sensor on the Accuracy of Biophysical Parameter Estimation in Case II Waters. Opt. Express 2012, 20, 4309–4330. [Google Scholar] [CrossRef]
- Pahlevan, N.; Lee, Z.; Wei, J.; Schaaf, C.B.; Schott, J.R.; Berk, A. On-Orbit Radiometric Characterization of OLI (Landsat-8) for Applications in Aquatic Remote Sensing. Remote Sens. Environ. 2014, 154, 272–284. [Google Scholar] [CrossRef]
- Schröder, T.; Schmidt, S.I.; Kutzner, R.D.; Bernert, H.; Stelzer, K.; Friese, K.; Rinke, K. Exploring Spatial Aggregations and Temporal Windows for Water Quality Match-Up Analysis Using Sentinel-2 MSI and Sentinel-3 OLCI Data. Remote Sens. 2024, 16, 2798. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Advantages of High Quality SWIR Bands for Ocean Colour Processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef]
- Jorge, D.S.F.; Barbosa, C.C.F.; De Carvalho, L.A.S.; Affonso, A.G.; Lobo, F.D.L.; Novo, E.M.L.D.M. SNR (Signal-To-Noise Ratio) Impact on Water Constituent Retrieval from Simulated Images of Optically Complex Amazon Lakes. Remote Sens. 2017, 9, 644. [Google Scholar] [CrossRef]
- International Ocean Colour Coordinating Group (IOCCG). Mission Requirements for Future Ocean-Colour Sensors; IOCCG Report Series; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2012. [Google Scholar]
- Qi, L.; Lee, Z.; Hu, C.; Wang, M. Requirement of Minimal Signal-to-Noise Ratios of Ocean Color Sensors and Uncertainties of Ocean Color Products. J. Geophys. Res. Ocean. 2017, 122, 2595–2611. [Google Scholar] [CrossRef]
- Cetinic, I.; McClain, C.R.; Werdell, P.J. Pre-Aerosol, Clouds, and Ocean Ecosystem (PACE) Mission Science Definition Team Report: PACE Technical Report Series—Volume 2; National Aeronautics and Space Administration: Washington, DC, USA, 2018. [Google Scholar]
- International Ocean Colour Coordinating Group (IOCCG). Ocean-Colour Observations from a Geostationary Orbit; IOCCG Report Series; International Ocean Colour Coordinating Group: Dartmouth, NS, Canada, 2012. [Google Scholar]
- Werdell, P.J.; McClain, C.R. Satellite Remote Sensing: Ocean Color. In Encyclopedia of Ocean Sciences; GSFC-E-DAA-TN65587; Elsevier: Amsterdam, The Netherlands, 2019; Volume 5, pp. 443–455. ISBN 978-0-12-813082-7. [Google Scholar]
- Dekker, A.G.; Hestir, E.L. Evaluating the Feasibility of Systematic Inland Water Quality Monitoring with Satellite Remote Sensing; Commonwealth Scientific and Industrial Research Organization: Canberra, Australia, 2012. [Google Scholar]
- Hu, C.; Carder, K.L.; Muller-Karger, F.E. Atmospheric Correction of SeaWiFS Imagery over Turbid Coastal Waters: A Practical Method. Remote Sens. Environ. 2000, 74, 195–206. [Google Scholar] [CrossRef]
- Ruddick, K.G.; Ovidio, F.; Rijkeboer, M. Atmospheric Correction of SeaWiFS Imagery for Turbid Coastal and Inland Waters. Appl. Opt. 2000, 39, 897–912. [Google Scholar] [CrossRef]
- DeepAI. Available online: https://deepai.org/ (accessed on 5 April 2025).
- Chavez, P.S. Image-Based Atmospheric Corrections—Revisited and Improved. Photogramm. Eng. Remote Sens. 1996, 62, 1025–1035. [Google Scholar]
- El Alem, A.; Lhissou, R.; Chokmani, K.; Oubennaceur, K. Remote Retrieval of Suspended Particulate Matter in Inland Waters: Image-Based or Physical Atmospheric Correction Models? Water 2021, 13, 2149. [Google Scholar] [CrossRef]
- Chavez, P.S. An Improved Dark-Object Subtraction Technique for Atmospheric Scattering Correction of Multispectral Data. Remote Sens. Environ. 1988, 24, 459–479. [Google Scholar] [CrossRef]
- Gong, S.; Huang, J.; Li, Y.; Wang, H. Comparison of Atmospheric Correction Algorithms for TM Image in Inland Waters. Int. J. Remote Sens. 2008, 29, 2199–2210. [Google Scholar] [CrossRef]
- Bernstein, L.S.; Adler-Golden, S.M.; Sundberg, R.L.; Levine, R.Y.; Perkins, T.C.; Berk, A.; Ratkowski, A.J.; Felde, G.; Hoke, M.L. Validation of the QUick Atmospheric Correction (QUAC) Algorithm for VNIR-SWIR Multi- and Hyperspectral Imagery. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XI SPIE, Orlando, FL, USA, 28 March–1 April 2005; Volume 5806, pp. 668–678. [Google Scholar]
- Bernstein, L.S.; Adler-Golden, S.M.; Sundberg, R.L.; Levine, R.Y.; Perkins, T.C.; Berk, A.; Ratkowski, A.J.; Felde, G.; Hoke, M.L. A New Method for Atmospheric Correction and Aerosol Optical Property Retrieval for VIS-SWIR Multi- and Hyperspectral Imaging Sensors: QUAC (QUick Atmospheric Correction). In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Republic of Korea, 29 July 2005; Volume 5, pp. 3549–3552. [Google Scholar]
- Mancino, G.; Nolè, A.; Urbano, V.; Amato, M.; Ferrara, A. Assessing Water Quality by Remote Sensing in Small Lakes: The Case Study of Monticchio Lakes in Southern Italy. IForest—Biogeosci. For. 2009, 2, 154–161. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Perk, R.L.; Gurlin, D.; Rundquist, D.C.; Leavitt, B.C.; Barrow, T.M.; Brakhage, P. Estimation of Chlorophyll-a Concentration in Turbid Productive Waters Using Airborne Hyperspectral Data. Water Res. 2012, 46, 993–1004. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.; Wang, S.; Zhou, Y.; Troy, A. Mapping the Concentrations of Total Suspended Matter in Lake Taihu, China, Using Landsat-5 TM Data. Int. J. Remote Sens. 2006, 27, 1177–1191. [Google Scholar] [CrossRef]
- Allan, M.G.; Hamilton, D.P.; Hicks, B.J.; Brabyn, L. Landsat Remote Sensing of Chlorophyll a Concentrations in Central North Island Lakes of New Zealand. Int. J. Remote Sens. 2011, 32, 2037–2055. [Google Scholar] [CrossRef]
- Vermote, E.F.; Tanre, D.; Deuze, J.L.; Herman, M.; Morcette, J.-J. Second Simulation of the Satellite Signal in the Solar Spectrum, 6S: An Overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Emde, C.; Buras-Schnell, R.; Kylling, A.; Mayer, B.; Gasteiger, J.; Hamann, U.; Kylling, J.; Richter, B.; Pause, C.; Dowling, T.; et al. The libRadtran Software Package for Radiative Transfer Calculations (Version 2.0.1). Geosci. Model Dev. 2016, 9, 1647–1672. [Google Scholar] [CrossRef]
- Richter, R.; Schlapfer, D. Atmospheric and Topographic Correction (ATCOR Theoretical Background Document). DLR IB 2023, 1, 564-03. [Google Scholar]
- U.S. Geological Survey. Landsat 8 Surface Reflectance Code (LASRC) Poduct Guide; U.S. Geological Survey: Reston, VA, USA, 2019. [Google Scholar]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the Image and Signal Processing for Remote Sensing XXIII, At SPIE Remote Sensing, Warsaw, Poland, 11–13 September 2017; Volume 10427, pp. 37–48. [Google Scholar]
- Cao, Z.; Ma, R.; Liu, J.; Ding, J. Improved Radiometric and Spatial Capabilities of the Coastal Zone Imager Onboard Chinese HY-1C Satellite for Inland Lakes. IEEE Geosci. Remote Sens. Lett. 2021, 18, 193–197. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Statistics of the Sea Surface Derived from Sun Glitter. J. Mar. Res. 1954, 13, 198–227. [Google Scholar]
- Goodman, J.A.; Lee, Z.; Ustin, S.L. Influence of Atmospheric and Sea-Surface Corrections on Retrieval of Bottom Depth and Reflectance Using a Semi-Analytical Model: A Case Study in Kaneohe Bay, Hawaii. Appl. Opt. 2008, 47, F1–F11. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Technical Note: Simple and Robust Removal of Sun Glint for Mapping Shallow-water Benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral Bathymetry Using a Simple Physically Based Algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M.; Tormos, T.; Reynaud, N.; Danis, P.-A. Sunglint Correction of the Multi-Spectral Instrument (MSI)-SENTINEL-2 Imagery over Inland and Sea Waters from SWIR Bands. Remote Sens. Environ. 2018, 204, 308–321. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmäe, E.; Praks, J. A Sun Glint Correction Method for Hyperspectral Imagery Containing Areas with Non-Negligible Water Leaving NIR Signal. Remote Sens. Environ. 2009, 113, 2267–2274. [Google Scholar] [CrossRef]
- Emberton, S.; Chittka, L.; Cavallaro, A.; Wang, M. Sensor Capability and Atmospheric Correction in Ocean Colour Remote Sensing. Remote Sens. 2016, 8, 1. [Google Scholar] [CrossRef]
- Griffin, M.K.; Burke, H.K. Compensation of Hyperspectral Data for Atmospheric Effects. Linc. Lab. J. 2003, 14, 29–54. [Google Scholar]
- Mobley, C.D.; Werdell, J.; Franz, B.; Ahmad, Z.; Bailey, S. Atmospheric Correction for Satellite Ocean Color Radiometry; NASA: Washington, DC, USA, 2016. [Google Scholar]
- Steinmetz, F.; Deschamps, P.-Y.; Ramon, D. Atmospheric Correction in Presence of Sun Glint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric Correction of Metre-Scale Optical Satellite Data for Inland and Coastal Water Applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- McClain, C.R.; Cleave, M.L.; Feldman, G.C.; Gregg, W.W.; Hooker, S.B.; Kuring, N. Science Quality SeaWiFS Data for Global Biosphere Research: Ocean Color Is Back, Providing Global Estimates of Oceanic Chlorophyll-a, Other Bio-Optical Quantities—Data Critical for Understanding Temporal Variability of Marine Ecosystems. Sea Technol. 1998, 39, 10–16. [Google Scholar]
- Wang, D.; Tang, B.-H.; Li, Z.-L. Evaluation of Five Atmospheric Correction Algorithms for Multispectral Remote Sensing Data over Plateau Lake. Ecol. Inform. 2024, 82, 102666. [Google Scholar] [CrossRef]
- Shi, W.; Wang, M. An Assessment of the Black Ocean Pixel Assumption for MODIS SWIR Bands. Remote Sens. Environ. 2009, 113, 1587–1597. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W. Sensor Noise Effects of the SWIR Bands on MODIS-Derived Ocean Color Products. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3280–3292. [Google Scholar] [CrossRef]
- Chen, J.; Cui, T.; Lin, C. An Improved SWIR Atmospheric Correction Model: A Cross-Calibration-Based Model. IEEE Trans. Geosci. Remote Sens. 2013, 52, 3959–3967. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Arnone, R.A.; Gould, R.W., Jr.; Martinolich, P.M.; Ransibrahmanakul, V. A Partially Coupled Ocean-Atmosphere Model for Retrieval of Water-Leaving Radiance from SeaWiFS in Coastal Waters. NASA Tech. Memo.—SeaWIFS Postlaunch Tech. Rep. Ser. 2003, 22, 51–59. [Google Scholar]
- Pahlevan, N.; Schott, J.R.; Franz, B.A.; Zibordi, G.; Markham, B.; Bailey, S.; Schaaf, C.B.; Ondrusek, M.; Greb, S.; Strait, C.M. Landsat 8 Remote Sensing Reflectance (Rrs) Products: Evaluations, Intercomparisons, and Enhancements. Remote Sens. Environ. 2017, 190, 289–301. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Adaptation of the Dark Spectrum Fitting Atmospheric Correction for Aquatic Applications of the Landsat and Sentinel-2 Archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- De Keukelaere, L.; Sterckx, S.; Adriaensen, S.; Knaeps, E.; Reusen, I.; Giardino, C.; Bresciani, M.; Hunter, P.; Neil, C.; Van der Zande, D.; et al. Atmospheric Correction of Landsat-8/OLI and Sentinel-2/MSI Data Using iCOR Algorithm: Validation for Coastal and Inland Waters. Eur. J. Remote Sens. 2018, 51, 525–542. [Google Scholar] [CrossRef]
- Zhao, D.; Feng, L.; Sun, K. Development of a Practical Atmospheric Correction Algorithm for Inland and Nearshore Coastal Waters. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5402515. [Google Scholar] [CrossRef]
- Fan, Y.; Li, W.; Gatebe, C.K.; Jamet, C.; Zibordi, G.; Schroeder, T.; Stamnes, K. Atmospheric Correction over Coastal Waters Using Multilayer Neural Networks. Remote Sens. Environ. 2017, 199, 218–240. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Peters, M.; Kerstin, S.; Embacher, S.; Ruescas, A. Evolution of the C2RCC Neural Network for Sentinel 2 and 3 for the Retrieval of Ocean Colour Products in Normal and Extreme Optically Complex Waters. Living Planet Symp. 2016, 740, 54. [Google Scholar]
- Hieronymi, M.; Krasemann, H.; Mueller, D.; Brockmann, C.; Ruescas, A.; Stelzer, K.; Nechad, B.; Ruddick, K.; Simis, S.; Tilstone, G.; et al. Ocean Colour Remote Sensing of Extreme Case-2 Waters. In Proceedings of the 2016 ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Llodrà-Llabrés, J.; Martínez-López, J.; Postma, T.; Pérez-Martínez, C.; Alcaraz-Segura, D. Retrieving Water Chlorophyll-a Concentration in Inland Waters from Sentinel-2 Imagery: Review of Operability, Performance and Ways Forward. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103605. [Google Scholar] [CrossRef]
- Radin, C.; Sòria-Perpinyà, X.; Delegido, J. Estudio multitemporal de calidad del agua del embalse de Sitjar (Castelló, España) utilizando imágenes Sentinel-2. Rev. Teledetec. 2020, 56, 117–130. [Google Scholar] [CrossRef]
- Cuartero, A.; Cáceres-Merino, J.; Torrecilla-Pinero, J.A. An Application of C2-Net Atmospheric Corrections for Chlorophyll-a Estimation in Small Reservoirs. Remote Sens. Appl. Soc. Environ. 2023, 32, 101021. [Google Scholar] [CrossRef]
- Karpouzli, E.; Malthus, T. The Empirical Line Method for the Atmospheric Correction of IKONOS Imagery. Int. J. Remote Sens. 2003, 24, 1143–1150. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Zibordi, G. On the Detectability of Adjacency Effects in Ocean Color Remote Sensing of Mid-Latitude Coastal Environments by SeaWiFS, MODIS-A, MERIS, OLCI, OLI and MSI. Remote Sens. Environ. 2018, 209, 423–438. [Google Scholar] [CrossRef]
- Sterckx, S.; Knaeps, E.; Ruddick, K. Detection and Correction of Adjacency Effects in Hyperspectral Airborne Data of Coastal and Inland Waters: The Use of the near Infrared Similarity Spectrum. Int. J. Remote Sens. 2011, 32, 6479–6505. [Google Scholar] [CrossRef]
- Wu, Y.; Knudby, A.; Pahlevan, N.; Lapen, D.; Zeng, C. Sensor-Generic Adjacency-Effect Correction for Remote Sensing of Coastal and Inland Waters. Remote Sens. Environ. 2024, 315, 114433. [Google Scholar] [CrossRef]
- Sei, A. Efficient Correction of Adjacency Effects for High-Resolution Imagery: Integral Equations, Analytic Continuation, and Padé Approximants. Appl. Opt. 2015, 54, 3748–3758. [Google Scholar] [CrossRef]
- Paulino, R.S.; Martins, V.S.; Novo, E.M.L.M.; Barbosa, C.C.F.; de Carvalho, L.A.S.; Begliomini, F.N. Assessment of Adjacency Correction over Inland Waters Using Sentinel-2 MSI Images. Remote Sens. 2022, 14, 1829. [Google Scholar] [CrossRef]
- Castagna, A.; Vanhellemont, Q. A Generalized Physics-Based Correction for Adjacency Effects. Appl. Opt. 2025, 64, 2719–2743. [Google Scholar] [CrossRef]
- Wu, Y.; Knudby, A.; Lapen, D. Topography-Adjusted Monte Carlo Simulation of the Adjacency Effect in Remote Sensing of Coastal and Inland Waters. J. Quant. Spectrosc. Radiat. Transf. 2023, 303, 108589. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Kiselev, V.; Zibordi, G. Simulation and Analysis of Adjacency Effects in Coastal Waters: A Case Study. Appl. Opt. 2014, 53, 1523–1545. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Bélanger, S. Genetic Algorithm for Atmospheric Correction (GAAC) of Water Bodies Impacted by Adjacency Effects. Remote Sens. Environ. 2025, 317, 114508. [Google Scholar] [CrossRef]
- Yan, N.; Sun, Z.; Huang, W.; Jun, Z.; Sun, S. Assessing Landsat-8 Atmospheric Correction Schemes in Low to Moderate Turbidity Waters from a Global Perspective. Int. J. Digit. Earth 2023, 16, 66–92. [Google Scholar] [CrossRef]
- Pereira-Sandoval, M.; Ruescas, A.; Urrego, P.; Ruiz-Verdú, A.; Delegido, J.; Tenjo, C.; Soria-Perpinyà, X.; Vicente, E.; Soria, J.; Moreno, J. Evaluation of Atmospheric Correction Algorithms over Spanish Inland Waters for Sentinel-2 Multi Spectral Imagery Data. Remote Sens. 2019, 11, 1469. [Google Scholar] [CrossRef]
- Warren, M.A.; Simis, S.G.H.; Martinez-Vicente, V.; Poser, K.; Bresciani, M.; Alikas, K.; Spyrakos, E.; Giardino, C.; Ansper, A. Assessment of Atmospheric Correction Algorithms for the Sentinel-2A MultiSpectral Imager over Coastal and Inland Waters. Remote Sens. Environ. 2019, 225, 267–289. [Google Scholar] [CrossRef]
- Pan, Y.; Bélanger, S.; Huot, Y. Evaluation of Atmospheric Correction Algorithms over Lakes for High-Resolution Multispectral Imagery: Implications of Adjacency Effect. Remote Sens. 2022, 14, 2979. [Google Scholar] [CrossRef]
- Pahlevan, N.; Mangin, A.; Balasubramanian, S.V.; Smith, B.; Alikas, K.; Arai, K.; Barbosa, C.; Bélanger, S.; Binding, C.; Bresciani, M.; et al. ACIX-Aqua: A Global Assessment of Atmospheric Correction Methods for Landsat-8 and Sentinel-2 over Lakes, Rivers, and Coastal Waters. Remote Sens. Environ. 2021, 258, 112366. [Google Scholar] [CrossRef]
- Ge, Y.; Shen, F.; Sklenička, P.; Vymazal, J.; Baxa, M.; Chen, Z. Machine Learning for Cyanobacteria Inversion via Remote Sensing and AlgaeTorch in the Třeboň Fishponds, Czech Republic. Sci. Total Environ. 2024, 947, 174504. [Google Scholar] [CrossRef]
- Begliomini, F.N.; Barbosa, C.C.F.; Martins, V.S.; Novo, E.M.L.M.; Paulino, R.S.; Maciel, D.A.; Lima, T.M.A.; O’Shea, R.E.; Pahlevan, N.; Lamparelli, M.C. Machine Learning for Cyanobacteria Mapping on Tropical Urban Reservoirs Using PRISMA Hyperspectral Data. ISPRS J. Photogramm. Remote Sens. 2023, 204, 378–396. [Google Scholar] [CrossRef]
- Fooladi, M.; Nikoo, M.R.; Mirghafari, R.; Madramootoo, C.A.; Al-Rawas, G.; Nazari, R. Robust Clustering-Based Hybrid Technique Enabling Reliable Reservoir Water Quality Prediction with Uncertainty Quantification and Spatial Analysis. J. Environ. Manage. 2024, 362, 121259. [Google Scholar] [CrossRef]
- Gao, L.; Shangguan, Y.; Sun, Z.; Shen, Q.; Shi, Z. Estimation of Non-Optically Active Water Quality Parameters in Zhejiang Province Based on Machine Learning. Remote Sens. 2024, 16, 514. [Google Scholar] [CrossRef]
- Guo, H.; Huang, J.J.; Zhu, X.; Tian, S.; Wang, B. Spatiotemporal Variation Reconstruction of Total Phosphorus in the Great Lakes since 2002 Using Remote Sensing and Deep Neural Network. Water Res. 2024, 255, 121493. [Google Scholar] [CrossRef] [PubMed]
- Jiang, D.; Dong, C.; Ma, Z.; Wang, X.; Lin, K.; Yang, F.; Chen, X. Monitoring Saltwater Intrusion to Estuaries Based on UAV and Satellite Imagery with Machine Learning Models. Remote Sens. Environ. 2024, 308, 114198. [Google Scholar] [CrossRef]
- Khan, R.M.; Salehi, B.; Niroumand-Jadidi, M.; Mahdianpari, M. Mapping Water Clarity in Small Oligotrophic Lakes Using Sentinel-2 Imagery and Machine Learning Methods: A Case Study of Canandaigua Lake in Finger Lakes, New York. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 4674–4688. [Google Scholar] [CrossRef]
- Leggesse, E.; Zimale, F.; Sultan, D.; Enku, T.; Tilahun, S.A. Advancing Non-Optical Water Quality Monitoring in Lake Tana, Ethiopia: Insights from Machine Learning and Remote Sensing Techniques. Front. Water 2024, 6, 1432280. [Google Scholar] [CrossRef]
- Mamun, M.; Hasan, M.; An, K.-G. Advancing Reservoirs Water Quality Parameters Estimation Using Sentinel-2 and Landsat-8 Satellite Data with Machine Learning Approaches. Ecol. Inform. 2024, 81, 102608. [Google Scholar] [CrossRef]
- Nikoo, M.R.; Zamani, M.G.; Zadeh, M.M.; Al-Rawas, G.; Al-Wardy, M.; Gandomi, A.H. Mapping Reservoir Water Quality from Sentinel-2 Satellite Data Based on a New Approach of Weighted Averaging: Application of Bayesian Maximum Entropy. Sci. Rep. 2024, 14, 16438. [Google Scholar] [CrossRef]
- Tian, D.; Zhao, X.; Gao, L.; Liang, Z.; Yang, Z.; Zhang, P.; Wu, Q.; Ren, K.; Li, R.; Yang, C.; et al. Estimation of Water Quality Variables Based on Machine Learning Model and Cluster Analysis-Based Empirical Model Using Multi-Source Remote Sensing Data in Inland Reservoirs, South China. Environ. Pollut. 2024, 342, 123104. [Google Scholar] [CrossRef]
- Zhao, Y.; He, X.; Pan, S.; Bai, Y.; Wang, D.; Li, T.; Gong, F.; Zhang, X. Satellite Retrievals of Water Quality for Diverse Inland Waters from Sentinel-2 Images: An Example from Zhejiang Province, China. Int. J. Appl. Earth Obs. Geoinf. 2024, 132, 104048. [Google Scholar] [CrossRef]
- Zhu, L.; Cui, T.; Runa, A.; Pan, X.; Zhao, W.; Xiang, J.; Cao, M. Robust Remote Sensing Retrieval of Key Eutrophication Indicators in Coastal Waters Based on Explainable Machine Learning. ISPRS J. Photogramm. Remote Sens. 2024, 211, 262–280. [Google Scholar] [CrossRef]
- Ansari, M.; Akhoondzadeh, M. Mapping Water Salinity Using Landsat-8 OLI Satellite Images (Case Study: Karun Basin Located in Iran). Adv. Space Res. 2020, 65, 1490–1502. [Google Scholar] [CrossRef]
- Ansari, M.; Akhoondzadeh, M. Generation of Karun River Water Salinity Map from Landsat-8 Satellite Images using Support Vector Regression, Multilayer Perceptron and Genetic Algorithm. J. Environ. Stud. 2021, 46, 581–600. [Google Scholar] [CrossRef]
- Ansari, M.; Akhoondzadeh, M. Water Salinity Mapping of Karun Basin Located In Iran Using the SVR Method. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4-W18, 97–101. [Google Scholar] [CrossRef]
- Yan, Z.; Fang, C.; Song, K.; Wang, X.; Wen, Z.; Shang, Y.; Tao, H.; Lyu, Y. Spatiotemporal Variation in Biomass Abundance of Different Algal Species in Lake Hulun Using Machine Learning and Sentinel-3 Images. Sci. Rep. 2025, 15, 2739. [Google Scholar] [CrossRef]
- Feng, P.; Song, K.; Wen, Z.; Tao, H.; Yu, X.; Shang, Y. Remote Sensing Estimation of CDOM for Songhua River of China: Distributions and Implications. Remote Sens. 2024, 16, 4608. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, G.; Song, K.; Wen, Z.; Shang, Y.; Li, S.; Fang, C.; Tao, H. Comparison of Machine Learning Algorithms for Estimating Global Lake Clarity With Landsat TOA Data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4206514. [Google Scholar] [CrossRef]
- Nguyen, X.C.; Bui, V.K.H.; Cho, K.H.; Hur, J. Practical Application of Machine Learning for Organic Matter and Harmful Algal Blooms in Freshwater Systems: A Review. Crit. Rev. Environ. Sci. Technol. 2024, 54, 953–975. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, T.; Du, W.; Meng, Q.; Xu, X.; Zhao, X. A Comprehensive Review of Machine Learning for Water Quality Prediction over the Past Five Years. J. Mar. Sci. Eng. 2024, 12, 159. [Google Scholar] [CrossRef]
- Xia, K.; Wu, T.; Li, X.; Wang, S.; Tang, H.; Zu, Y.; Yang, Y. A Novel Method for Assessing Water Quality Status Using MODIS Images: A Case Study of Large Lakes and Reservoirs in China. J. Hydrol. 2024, 638, 131545. [Google Scholar] [CrossRef]
- Li, Z.; Yang, X.; Zhou, T.; Cai, S.; Zhang, W.; Mao, K.; Ou, H.; Ran, L.; Yang, Q.; Wang, Y. Monitoring Chlorophyll-a Concentration Variation in Fish Ponds from 2013 to 2022 in the Guangdong-Hong Kong-Macao Greater Bay Area, China. Remote Sens. 2024, 16, 2033. [Google Scholar] [CrossRef]
- Sillen, S.J.; Ross, M.R.V.; Collins, S.M. Long-Term Trends in Productivity Across Intermountain West Lakes Provide No Evidence of Widespread Eutrophication. Water Resour. Res. 2024, 60, e2023WR034997. [Google Scholar] [CrossRef]
- Park, J.; Khanal, S.; Zhao, K.; Byun, K. Remote Sensing of Chlorophyll-a and Water Quality over Inland Lakes: How to Alleviate Geo-Location Error and Temporal Discrepancy in Model Training. Remote Sens. 2024, 16, 2761. [Google Scholar] [CrossRef]
- Peng, C.; Xie, Z.; Jin, X. Using Ensemble Learning for Remote Sensing Inversion of Water Quality Parameters in Poyang Lake. Sustainability 2024, 16, 3355. [Google Scholar] [CrossRef]
- Zhang, J.; Fu, P.; Meng, F.; Yang, X.; Xu, J.; Cui, Y. Estimation Algorithm for Chlorophyll-a Concentrations in Water from Hyperspectral Images Based on Feature Derivation and Ensemble Learning. Ecol. Inform. 2022, 71, 101783. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Alikas, K.; Anstee, J.; Barbosa, C.; Binding, C.; Bresciani, M.; Cremella, B.; Giardino, C.; Gurlin, D.; et al. Simultaneous Retrieval of Selected Optical Water Quality Indicators from Landsat-8, Sentinel-2, and Sentinel-3. Remote Sens. Environ. 2022, 270, 112860. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Schalles, J.; Binding, C.; Cao, Z.; Ma, R.; Alikas, K.; Kangro, K.; Gurlin, D.; Hà, N.; et al. Seamless Retrievals of Chlorophyll-a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in Inland and Coastal Waters: A Machine-Learning Approach. Remote Sens. Environ. 2020, 240, 111604. [Google Scholar] [CrossRef]
- Chegoonian, A.M.; Pahlevan, N.; Zolfaghari, K.; Leavitt, P.R.; Davies, J.-M.; Baulch, H.M.; Duguay, C.R. Comparative Analysis of Empirical and Machine Learning Models for Chla Extraction Using Sentinel-2 and Landsat OLI Data: Opportunities, Limitations, and Challenges. Can. J. Remote Sens. 2023, 49, 2215333. [Google Scholar] [CrossRef]
- Smith, B.; Pahlevan, N.; Schalles, J.; Ruberg, S.; Errera, R.; Ma, R.; Giardino, C.; Bresciani, M.; Barbosa, C.; Moore, T.; et al. A Chlorophyll-a Algorithm for Landsat-8 Based on Mixture Density Networks. Front. Remote Sens. 2021, 1, 623678. [Google Scholar] [CrossRef]
- O’Shea, R.E.; Pahlevan, N.; Smith, B.; Bresciani, M.; Egerton, T.; Giardino, C.; Li, L.; Moore, T.; Ruiz-Verdu, A.; Ruberg, S.; et al. Advancing Cyanobacteria Biomass Estimation from Hyperspectral Observations: Demonstrations with HICO and PRISMA Imagery. Remote Sens. Environ. 2021, 266, 112693. [Google Scholar] [CrossRef]
- Khan, R.M.; Salehi, B.; Niroumand-Jadidi, M.; Mahdianpari, M. Global vs Local Random Forest Model for Water Quality Monitoring: Assessment in Finger Lakes Using Sentinel-2 Imagery and Gloria Dataset. In Proceedings of the IGARSS 2024-2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 4389–4392. [Google Scholar]
- Lehmann, M.K.; Gurlin, D.; Pahlevan, N.; Alikas, K.; Conroy, T.; Anstee, J.; Balasubramanian, S.V.; Barbosa, C.C.F.; Binding, C.; Bracher, A.; et al. GLORIA—A Globally Representative Hyperspectral in Situ Dataset for Optical Sensing of Water Quality. Sci. Data 2023, 10, 100. [Google Scholar] [CrossRef]
- Mainali, J.; Chang, H.; Chun, Y. A Review of Spatial Statistical Approaches to Modeling Water Quality. Prog. Phys. Geogr. Earth Environ. 2019, 43, 801–826. [Google Scholar] [CrossRef]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Kelly, M. The Standard Errors of Persistence. SSRN. 2019. Available online: https://ssrn.com/abstract=3398303 (accessed on 14 April 2025).
- Zheng, Y.; Wei, C.; Fu, H.; Li, H.; Fu, M.; Zheng, Y.; He, Q.; Yu, D. Spatial-Temporal Evolution Analysis of Pollutants in Daitou River Watershed Based on Sentinel-2 Satellite Images. Ecol. Indic. 2024, 166, 112436. [Google Scholar] [CrossRef]
- Mahboobi, H.; Shakiba, A.; Mirbagheri, B. Improving Groundwater Nitrate Concentration Prediction Using Local Ensemble of Machine Learning Models. J. Environ. Manage. 2023, 345, 118782. [Google Scholar] [CrossRef] [PubMed]
- Anselin, L. Rao’s Score Test in Spatial Econometrics. J. Stat. Plan. Inference 2001, 97, 113–139. [Google Scholar] [CrossRef]
- Brunsdon, C.; Fotheringham, S.; Charlton, M. Geographically Weighted Regression. J. R. Stat. Soc. Ser. Stat. 1998, 47, 431–443. [Google Scholar] [CrossRef]
- Nguyen, P.T.B.; Koedsin, W.; McNeil, D.; Van, T.P.D. Remote Sensing Techniques to Predict Salinity Intrusion: Application for a Data-Poor Area of the Coastal Mekong Delta, Vietnam. Int. J. Remote Sens. 2018, 39, 6676–6691. [Google Scholar] [CrossRef]
- Feng, H.; Wang, Y.; Li, Z.; Zhang, N.; Zhang, Y.; Gao, Y. Information Leakage in Deep Learning-Based Hyperspectral Image Classification: A Survey. Remote Sens. 2023, 15, 3793. [Google Scholar] [CrossRef]
- Zhao, R.; Yang, Q.; Wen, Z.; Fang, C.; Li, S.; Shang, Y.; Liu, G.; Tao, H.; Lyu, L.; Song, K. Satellite Estimation of pCO2 and Quantification of CO2 Fluxes in China’s Chagan Lake in the Context of Climate Change. Remote Sens. 2023, 15, 5680. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, Y.; Jiang, M.; Cao, Z.; Li, X.; Ma, R.; Xu, L.; Xiong, J. Estimation of Total Phosphorus Concentration in Lakes in the Yangtze-Huaihe Region Based on Sentinel-3/OLCI Images. Remote Sens. 2023, 15, 4487. [Google Scholar] [CrossRef]
- Rolf, E.; Proctor, J.; Carleton, T.; Bolliger, I.; Shankar, V.; Ishihara, M.; Recht, B.; Hsiang, S. A Generalizable and Accessible Approach to Machine Learning with Global Satellite Imagery. Nat. Commun. 2021, 12, 4392. [Google Scholar] [CrossRef] [PubMed]
- Knudby, A.; Richardson, G. Incorporation of Neighborhood Information Improves Performance of SDB Models. Remote Sens. Appl. Soc. Environ. 2023, 32, 101033. [Google Scholar] [CrossRef]
- Rolf, E. Evaluation Challenges for Geospatial ML. arXiv 2023, arXiv:2303.18087v1. [Google Scholar]
- Thopanaiah, C.K.; Gireesh Babu, C.N.; Gurani, V.; Rajani, T.; Pavani, A.; Muthukumaran, D.; Deivasigamani, S. Advanced Remote Sensing and Generative Models for Comprehensive Water Quality Management in a Changing Climate. Remote Sens. Earth Syst. Sci. 2024, 7, 596–611. [Google Scholar] [CrossRef]
- Guo, H.; Zhu, X.; Jeanne Huang, J.; Zhang, Z.; Tian, S.; Chen, Y. An Enhanced Deep Learning Approach to Assessing Inland Lake Water Quality and Its Response to Climate and Anthropogenic Factors. J. Hydrol. 2023, 620, 129466. [Google Scholar] [CrossRef]
- Adilakshmi, A.; Venkatesan, V. Effective Monitoring of Noyyal River Surface Water Quality Using Remote Sensing and Machine Learning and GIS Techniques. Desalination Water Treat. 2024, 320, 100630. [Google Scholar] [CrossRef]
- Shahvaran, A.R.; Kheyrollah Pour, H.; Van Cappellen, P. Comparative Evaluation of Semi-Empirical Approaches to Retrieve Satellite-Derived Chlorophyll-a Concentrations from Nearshore and Offshore Waters of a Large Lake (Lake Ontario). Remote Sens. 2024, 16, 1595. [Google Scholar] [CrossRef]
- Hou, Y.; Zhang, A.; Lv, R.; Zhao, S.; Ma, J.; Zhang, H.; Li, Z. A Study on Water Quality Parameters Estimation for Urban Rivers Based on Ground Hyperspectral Remote Sensing Technology. Environ. Sci. Pollut. Res. 2022, 29, 63640–63654. [Google Scholar] [CrossRef]
| Optically Active WQPs | Correlated Non-Optically Active WQPs | References |
|---|---|---|
| Chl-a | Phosphorus, nitrogen, dissolved oxygen, and chemical oxygen | [15,32,33] |
| CDOM | TDS, salinity, and electrical conductivity | [34,35,36,37] |
| TSM and TSS | TDS, salinity, and electrical conductivity | [38,39,40] |
| AC Algorithms | Example | Main Advantage | Main Disadvantage |
|---|---|---|---|
| Image-based methods | DOS, COST, QUAC | Simple to implement | Provides only partial correction |
| Radiative transfer models | FLAASH, ATCOR, LaSRC, Sen2Cor | Corrects both additive and multiplicative atmospheric effects | Has limitations in surface reflection removal (e.g., sky glint, sun glint) |
| SWIR black-pixel assumption | ACOLITE’s exponential extrapolation mode | Addresses nonnegligible water-leaving radiance in NIR | Limited to sensors with SWIR bands |
| Modeling marine contributions to NIR | [58,59,93] | Useful for sensors lacking SWIR bands | Based on assumptions that may not always hold |
| Combining/switching between NIR and SWIR | SeaDAS, L2gen | Addresses nonnegligible water-leaving radiance in NIR | Requires precise aerosol type determination |
| Land-based methods | iCOR, ACLANC | Addresses nonnegligible water-leaving radiance in NIR | Limited by availability of dark land pixels and variable aerosol properties |
| NN-based AC algorithms | OC-SMART, C2RCC, C2X, C2XC | Simultaneously retrieves Rrs and optically active WQPs; assumption-free | Requires multiple auxiliary data; highly data-dependent |
| Spectral-based algorithms | POLYMER, GRS | Corrects aerosol and sun glint simultaneously | Computationally intensive |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansari, M.; Knudby, A.; Amani, M.; Sawada, M. Retrieving Inland Water Quality Parameters via Satellite Remote Sensing: Sensor Evaluation, Atmospheric Correction, and Machine Learning Approaches. Remote Sens. 2025, 17, 1734. https://doi.org/10.3390/rs17101734
Ansari M, Knudby A, Amani M, Sawada M. Retrieving Inland Water Quality Parameters via Satellite Remote Sensing: Sensor Evaluation, Atmospheric Correction, and Machine Learning Approaches. Remote Sensing. 2025; 17(10):1734. https://doi.org/10.3390/rs17101734
Chicago/Turabian StyleAnsari, Mohsen, Anders Knudby, Meisam Amani, and Michael Sawada. 2025. "Retrieving Inland Water Quality Parameters via Satellite Remote Sensing: Sensor Evaluation, Atmospheric Correction, and Machine Learning Approaches" Remote Sensing 17, no. 10: 1734. https://doi.org/10.3390/rs17101734
APA StyleAnsari, M., Knudby, A., Amani, M., & Sawada, M. (2025). Retrieving Inland Water Quality Parameters via Satellite Remote Sensing: Sensor Evaluation, Atmospheric Correction, and Machine Learning Approaches. Remote Sensing, 17(10), 1734. https://doi.org/10.3390/rs17101734