
Sea Clutter Suppression Based on Chaotic Prediction Model by Combining the Generator and Long Short-Term Memory Networks



Abstract
1. Introduction
2. Sea Clutter Prediction Model
2.1. Classical LSTM-Based Prediction Model
2.2. Improved Prediction Model Combining the Generator and LSTM Networks
3. Sea Clutter Suppression Based on Chaotic Prediction
3.1. Echo Normalization and Denormalization
3.2. GLSTM-Based Model Training
3.3. Sea Clutter Estimation and Cancellation
4. Experimental Results and Analysis
4.1. Experimental Data
4.2. Subjective Evaluation of Sea Clutter
4.3. Prediction Accuracy of Sea Clutter
4.4. SCR Improvement
4.5. Analysis
4.5.1. Robustness Analysis
4.5.2. Weak Targets Detection
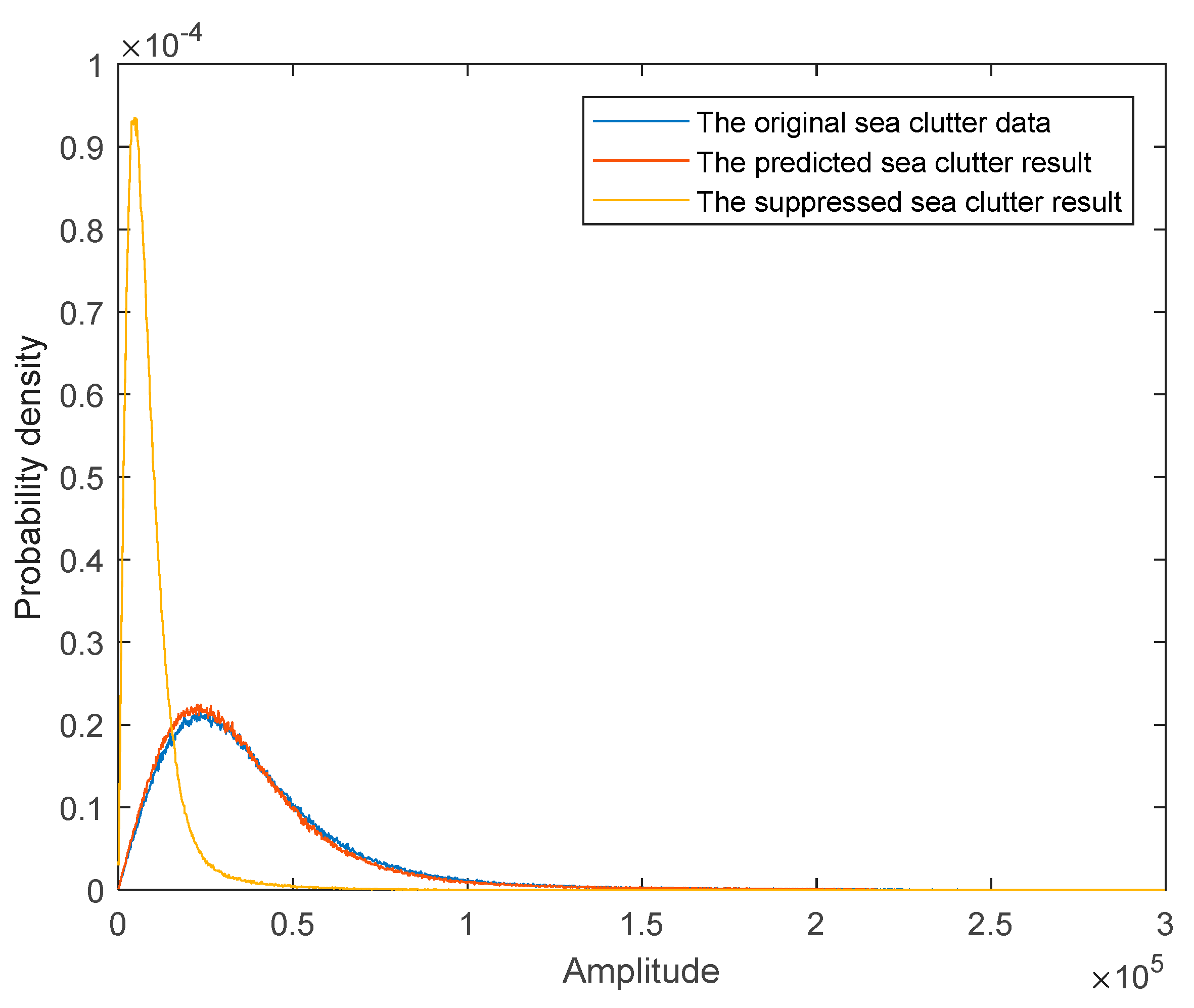
4.5.3. Comparison of Probability Densities
4.5.4. Comparison of the Prediction Computation Efficiency
4.5.5. Applicability to Another Area with Different Wave Field Characteristics
4.5.6. Applicability to Different Sea States
4.5.7. The Effect of White Caps
4.5.8. Applicability to Wind Seas and Swell Dominant Seas
5. Conclusions
- This proposed method uses a deep learning network for predicting sea clutter, subsequently suppressing the sea clutter through cancellation with the original echo. During training, it is essential to use sea clutter to construct the training dataset. In practical scenarios, radar echoes from real-world measurements without targets contain various interferences and noise, which reduces the accuracy of sea clutter prediction. In the future, reducing the sensitivity of the network to interference will be beneficial to enable the network to learn more intrinsic variations of sea clutter features, thus improving the accuracy of sea clutter prediction.
- The predicted sea clutter is used in the proposed method to cancel the echo. In a case where the echo contains a target, the energy of the target is inevitably attenuated after the cancellation. In the future, efforts to preserve the target energy as much as possible will be the key to improving the SCR and thus the radar’s target detection performance during the sea clutter suppression process.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SAR | SAR Synthetic Aperture Radar |
| LSTM | Long Short-Term Memory Networks |
| GANs | Generative Adversarial Networks |
| RBFNNs | Radial Basis Function Neural Networks |
| ANNs | Artificial Neural Networks |
| RNNs | Recurrent Neural Networks |
| GLSTM | modified prediction model combining the generator and LSTM |
| FC | fully connected layer |
| SCR | signal-to-clutter |
| JS | Jensen–Shannon |
| R-square | coefficient of determination |
| MSE | mean squared error |
References
- Haykin, S.; Li, X.B. Detection of signals in chaos. Proc. IEEE 1995, 83, 95–122. [Google Scholar] [CrossRef]
- Haykin, S.; Puthusserypady, S. Chaotic dynamics of sea clutter. Chaos Interdiscip. J. Nonlinear Sci. 1997, 7, 777–802. [Google Scholar] [CrossRef] [PubMed]
- Xie, N.; Leung, H.; Chan, H. A multiple-model prediction approach for sea clutter modeling. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1491–1502. [Google Scholar]
- Wang, Q.; Wen, B. Active Learning Artificial Neural Networks Ensemble for HF Ground Wave Radar Sea Clutter Predicting. In Proceedings of the 2009 International Conference on Computational Intelligence and Software Engineering, Wuhan, China, 11–13 December 2009; pp. 1–4. [Google Scholar]
- Gao, Z.; Chen, L. Sea Clutter Sequences Regression Prediction Based on PSO-GRNN Method. In Proceedings of the 2015 8th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 12–13 December 2015; Volume 1, pp. 72–75. [Google Scholar]
- Han, M.; Xi, J.H.; Xu, S.G.; Yin, F.L. Prediction of chaotic time series based on the recurrent predictor neural network. IEEE Trans. Signal Process. 2004, 52, 3409–3416. [Google Scholar] [CrossRef]
- Salehinejad, H.; Sankar, S.; Barfett, J.; Colak, E.; Valaee, S. Recent advances in recurrent neural networks. arXiv 2017, arXiv:1801.01078. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Ma, L.; Wu, J.; Zhang, J.; Wu, Z.; Jeon, G.; Tan, M.; Zhang, Y. Sea Clutter Amplitude Prediction Using a Long Short-Term Memory Neural Network. Remote Sens. 2019, 11, 2826. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. Adv. Neural Inf. Process. Syst. 2014, 27, 2672–2680. [Google Scholar]
- Li, C.L.; Chang, W.C.; Cheng, Y.; Yang, Y.; Póczos, B. Mmd gan: Towards deeper understanding of moment matching network. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Durgadevi, M. Generative adversarial network (gan): A general review on different variants of gan and applications. In Proceedings of the 2021 6th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, Indian, 8–10 July 2021; pp. 1–8. [Google Scholar]
- Takens, F. Detecting Strange Attractors in Turbulence; Dynamical Systems and Turbulence, Warwick 1980: Proceedings of a Symposium Held at the University of Warwick 1979/80; Springer: Berlin/Heidelberg, Germany, 2006; pp. 366–381. [Google Scholar]
- Matsumoto, T.; Nakajima, Y.; Saito, M.; Sugi, J.; Hamagishi, H. Reconstructions and predictions of nonlinear dynamical systems: A hierarchical Bayesian approach. IEEE Trans. Signal Process. 2001, 49, 2138–2155. [Google Scholar] [CrossRef]
- Tsai, S.-C.; Tzeng, W.-G.; Wu, H.-L. On the Jensen-Shannon divergence and variational distance. IEEE Trans. Inf. Theory 2005, 51, 3333–3336. [Google Scholar] [CrossRef]
- Zhu, H.L.; Yu, Z.; Yu, J.D. Sea Clutter Suppression Based on Complex-Valued Neural Networks Optimized by PSD. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9821–9828. [Google Scholar] [CrossRef]
- Cao, L. Practical method for determining the minimum embedding dimension of a scalar time series. Phys. D Nonlinear Phenom. 1997, 110, 43–50. [Google Scholar] [CrossRef]
- Liu, N.; Dong, Y.; Wang, G.; Ding, H.; Huang, Y.; Guan, J.; Chen, X.; He, Y. Sea detecting X-band radar and data acquisition program. J. Radars 2019, 8, 656–667. [Google Scholar]
- Liu, N.; Ding, H.; Huang, Y.; Dong, Y.; Wang, G.; Dong, K. Annual Progress of Sea-detecting X-band Radar and Data Acquisition Program. J. Radars 2021, 10, 173–182. [Google Scholar]
- Rousson, V.; Goşoniu, N.F. An R-square coefficient based on final prediction error. Stat. Methodol. 2007, 4, 331–340. [Google Scholar] [CrossRef]
- Drosopoulos, A. Description of the OHGR Database; Tech. Note; National Defence Canada, Defence Research Establishment Ottawa: Ottawa, ON, Canada, 1994; pp. 1–30. [Google Scholar]
- Greco, M.; Stinco, P.; Gini, F.; Rangaswamy, M. Impact of Sea Clutter Nonstationarity on Disturbance Covariance Matrix Estimation and CFAR Detector Performance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1502–1513. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The LSTM-Based Method | The GLSTM-Based Method | |
|---|---|---|
| Duration | 47.85 s | 57.75 s |
| Training Data | Testing Data | |
|---|---|---|
| Radar | X-band experimental radar | IPIX X-band polarimetric |
| Carrier frequency (GHz) | 9.3–9.5 | 9.39 |
| PRF (Hz) | 1697 | 1000 |
| Azimuth angle () | 42.17 | 128.9 |
| Polarization mode | HH | VV |
| Mode of operation | staring | 360 surveillance—2 min staring |
| Sea state | 4 | 4 |
| Significant wave height (m) | 2.17 | 2.01 |
| Wave velocity (m/s) | 10.01 | 11.75 |
| Wind speed (m/s) | 8.4 | 2.5 |
| Wind direction () | 155 | 300 |
| Wave age | 1.2 | 4.7 |
| Training Data | Testing Data 1 | Testing Data 2 | |
|---|---|---|---|
| Sea state | 4 | 5 | 3 |
| Significant wave height (m) | 2.17 | 2.80 | 1.41 |
| Polarization mode | HH | VV | HH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Pan, B.; Yu, Z.; Zhu, H.; Li, H.; Li, C.; Sun, H. Sea Clutter Suppression Based on Chaotic Prediction Model by Combining the Generator and Long Short-Term Memory Networks. Remote Sens. 2024, 16, 1260. https://doi.org/10.3390/rs16071260
Yu J, Pan B, Yu Z, Zhu H, Li H, Li C, Sun H. Sea Clutter Suppression Based on Chaotic Prediction Model by Combining the Generator and Long Short-Term Memory Networks. Remote Sensing. 2024; 16(7):1260. https://doi.org/10.3390/rs16071260
Chicago/Turabian StyleYu, Jindong, Baojing Pan, Ze Yu, Hongling Zhu, Hanfu Li, Chao Li, and Hezhi Sun. 2024. "Sea Clutter Suppression Based on Chaotic Prediction Model by Combining the Generator and Long Short-Term Memory Networks" Remote Sensing 16, no. 7: 1260. https://doi.org/10.3390/rs16071260
APA StyleYu, J., Pan, B., Yu, Z., Zhu, H., Li, H., Li, C., & Sun, H. (2024). Sea Clutter Suppression Based on Chaotic Prediction Model by Combining the Generator and Long Short-Term Memory Networks. Remote Sensing, 16(7), 1260. https://doi.org/10.3390/rs16071260