
An Improved NLCS Algorithm Based on Series Reversion and Elliptical Model Using Geosynchronous Spaceborne–Airborne UHF UWB Bistatic SAR for Oceanic Scene Imaging


Abstract
1. Introduction
2. Geometric Configuration and Analysis
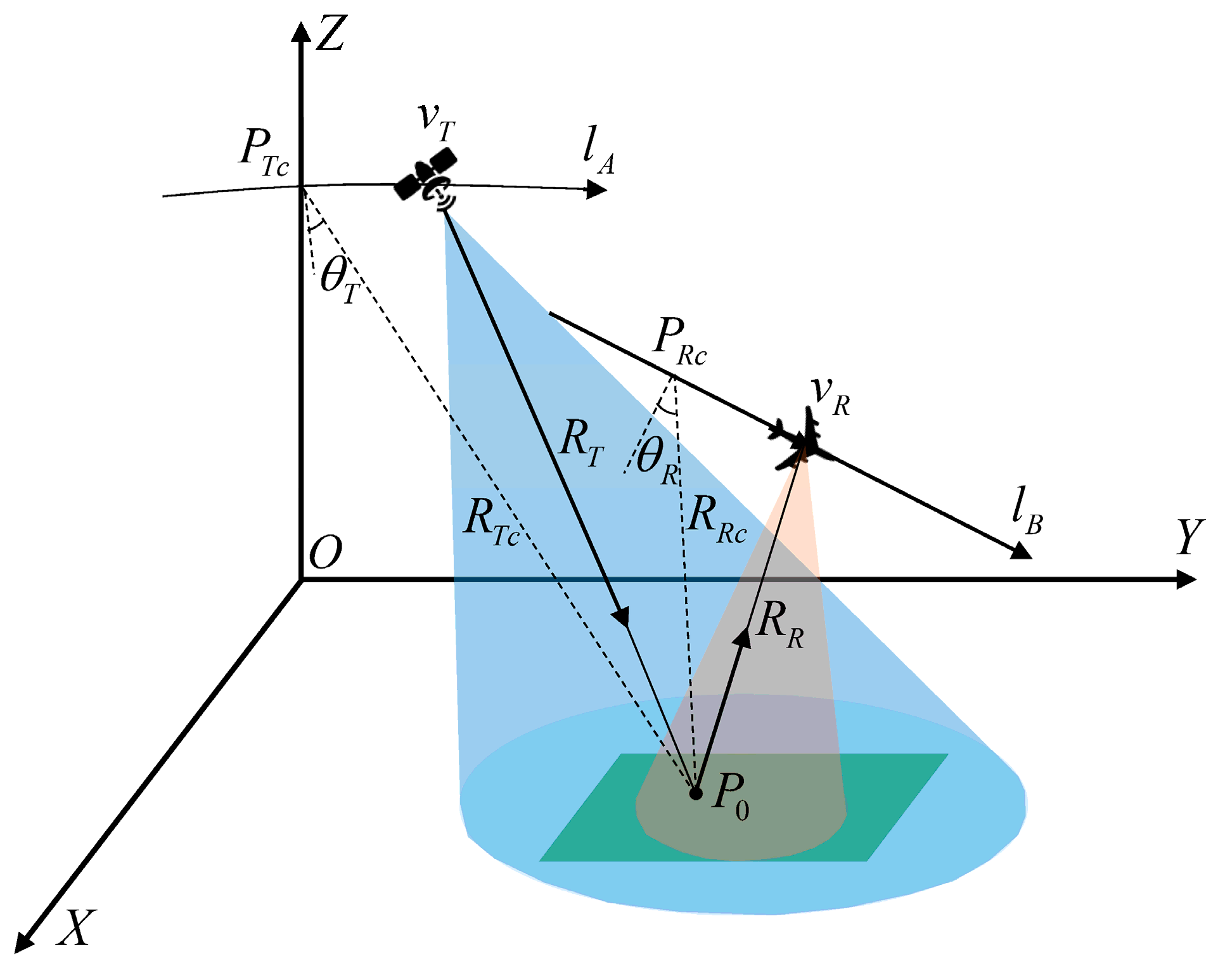
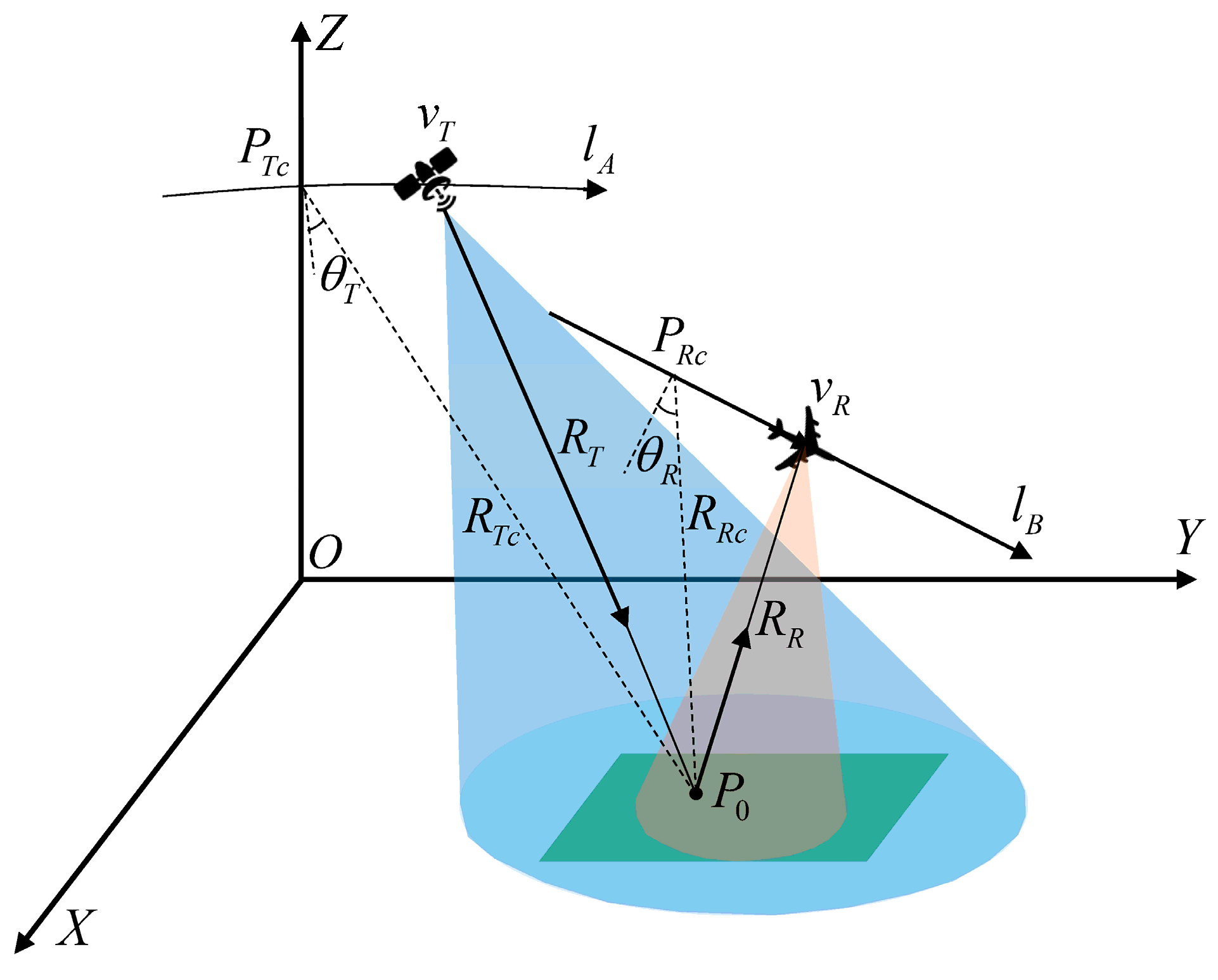
2.1. Imaging Geometric Configuration and Signal Model
2.2. Separation of Slant Range Model
3. Proposed Imaging Algorithm
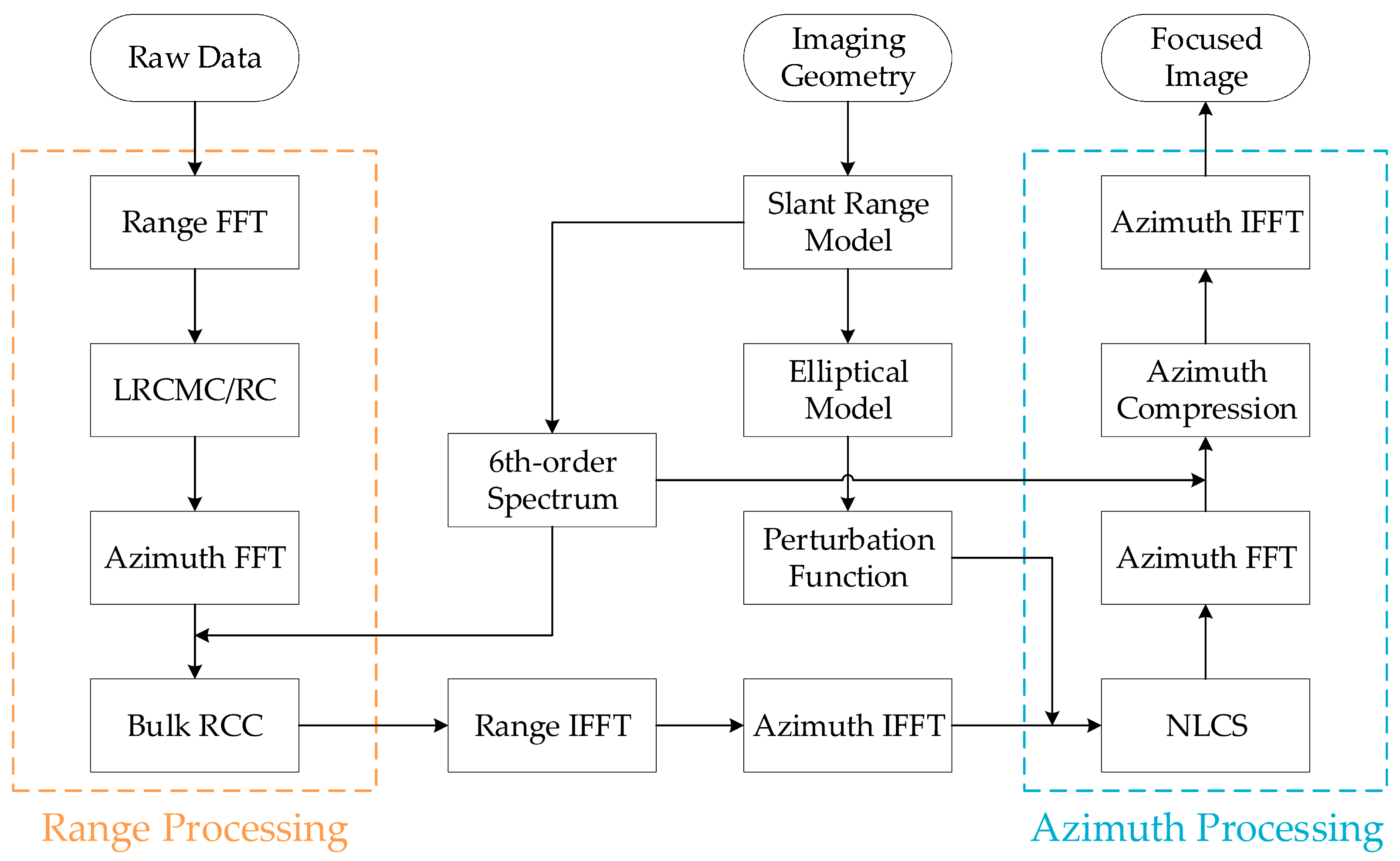
3.1. Description of the Proposed Algorithm
3.2. Range Processing
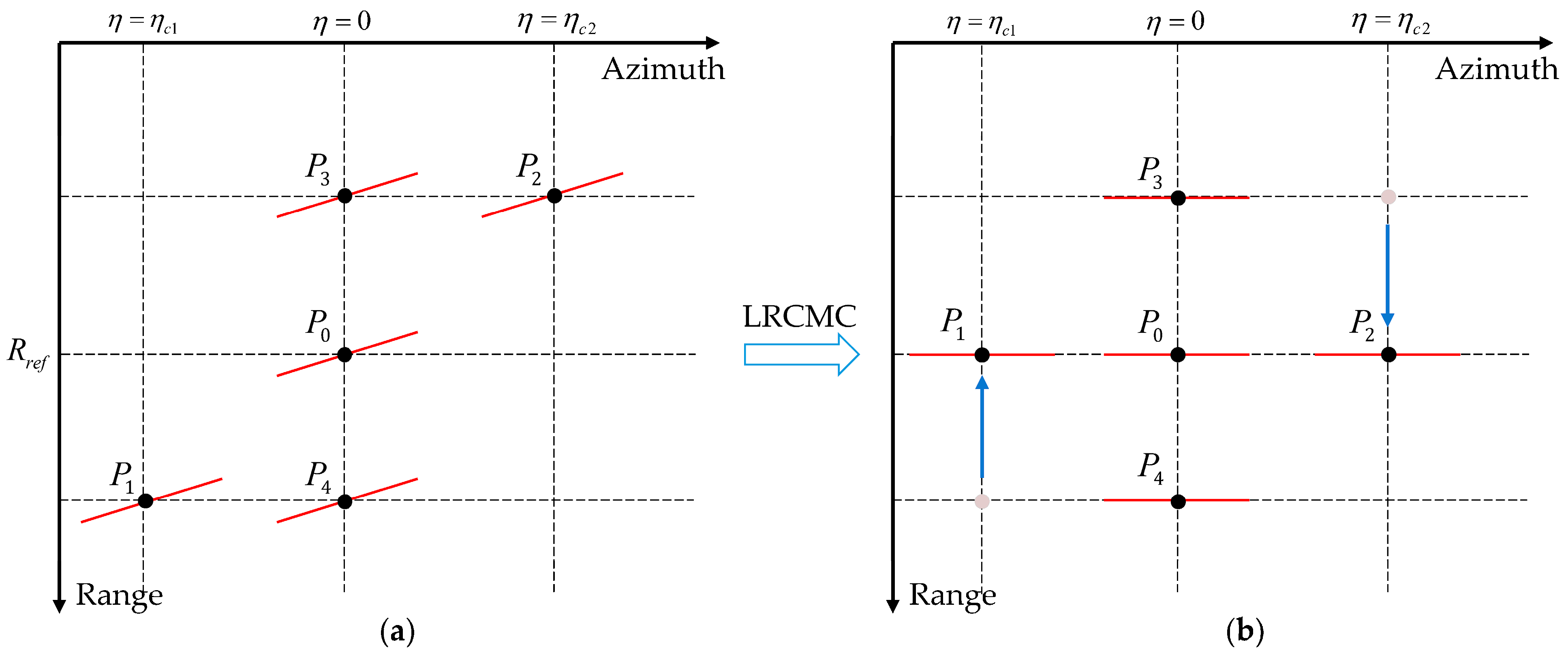
3.2.1. Linear Range Cell Migration Correction
3.2.2. Derivation of 2-D Spectrum and Bulk Range Curvature Correction
3.3. Azimuth Processing
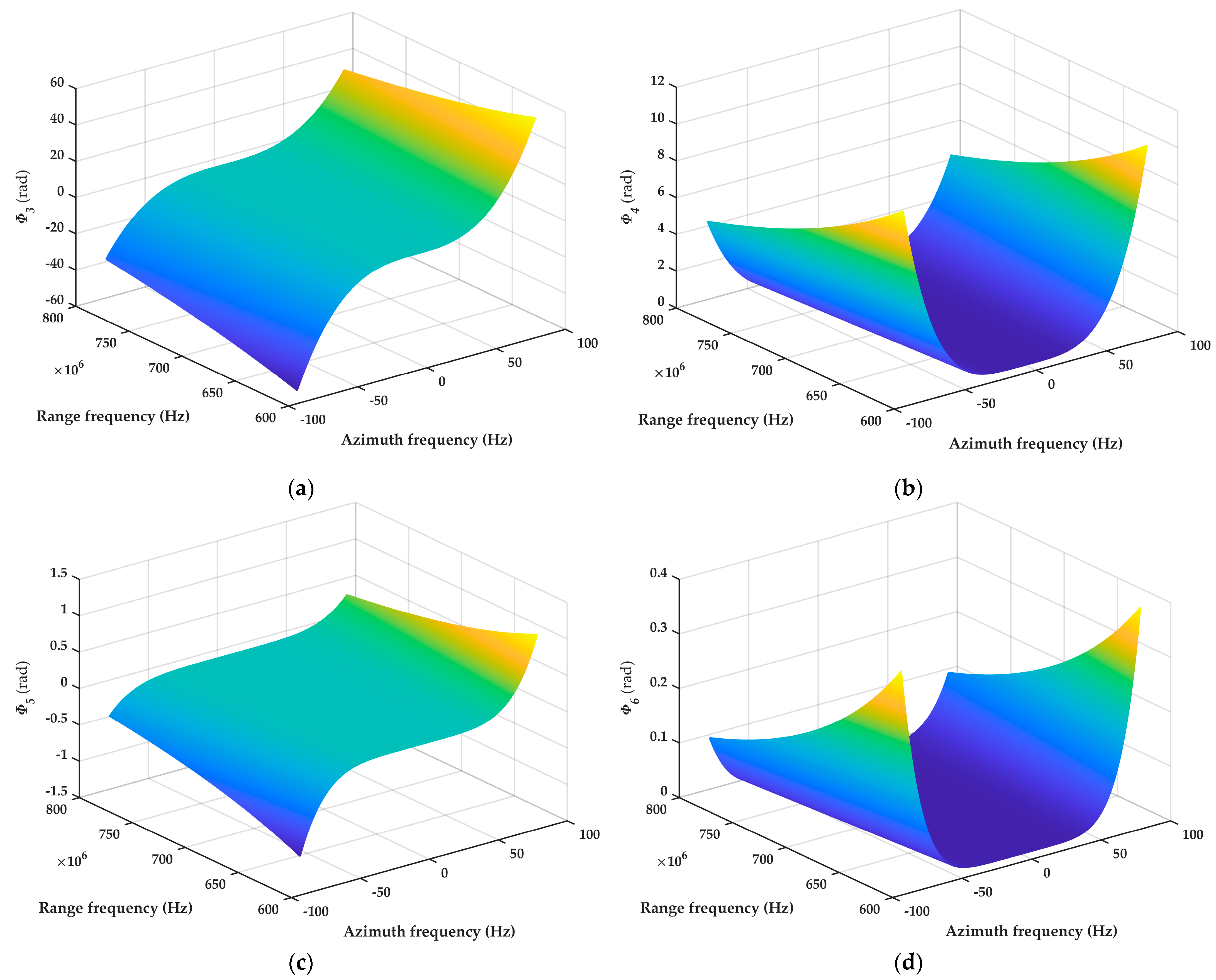
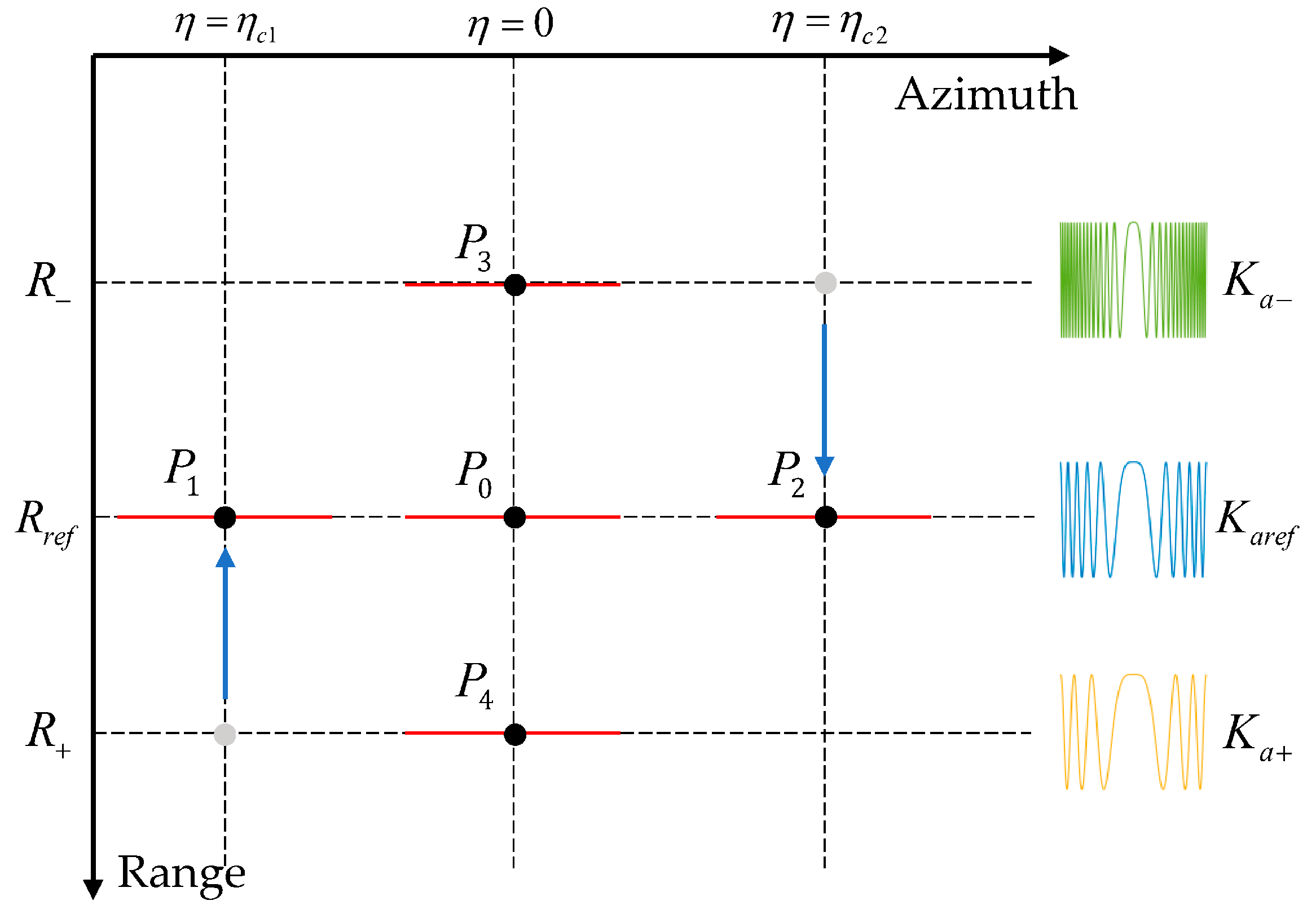
3.3.1. Analysis of FM Rate Distortion
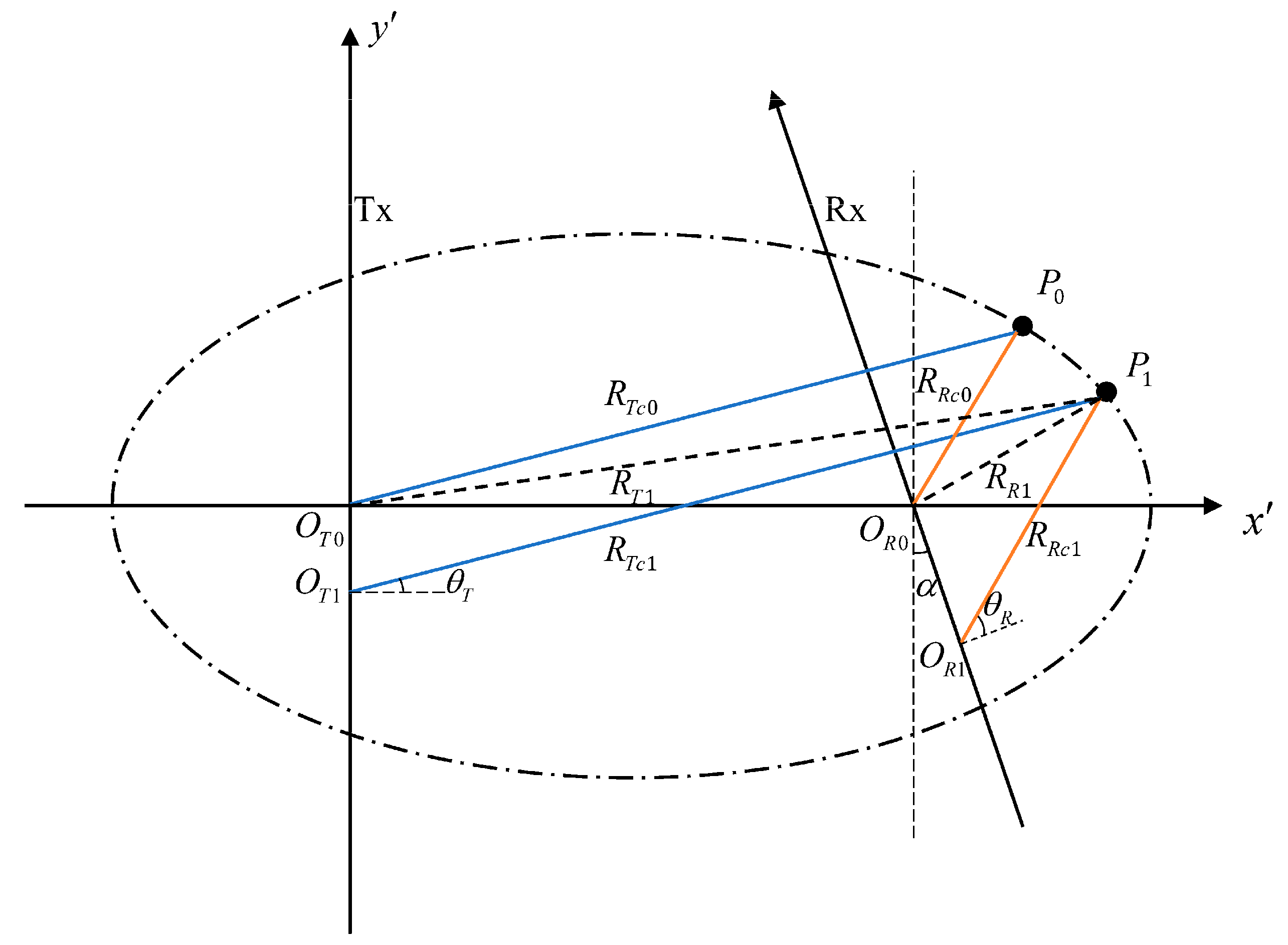
3.3.2. Elliptical Model and Perturbation Function
3.3.3. Azimuth Compression
3.4. Analysis of the Proposed Algorithm
3.4.1. Error and Boundary Condition
3.4.2. Computational Cost
4. Experiment and Discussion
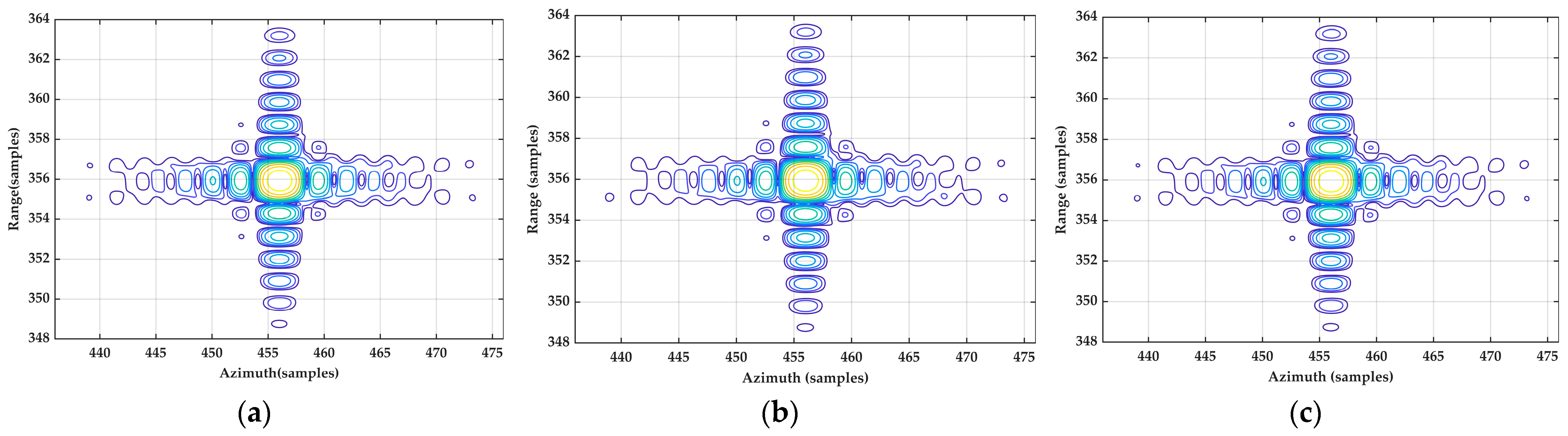
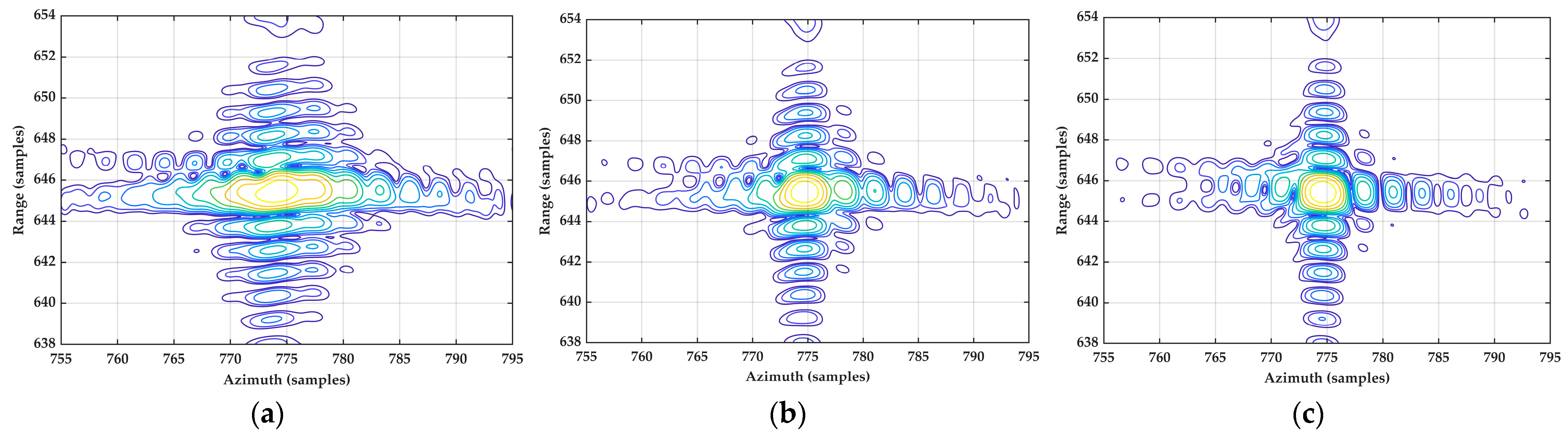
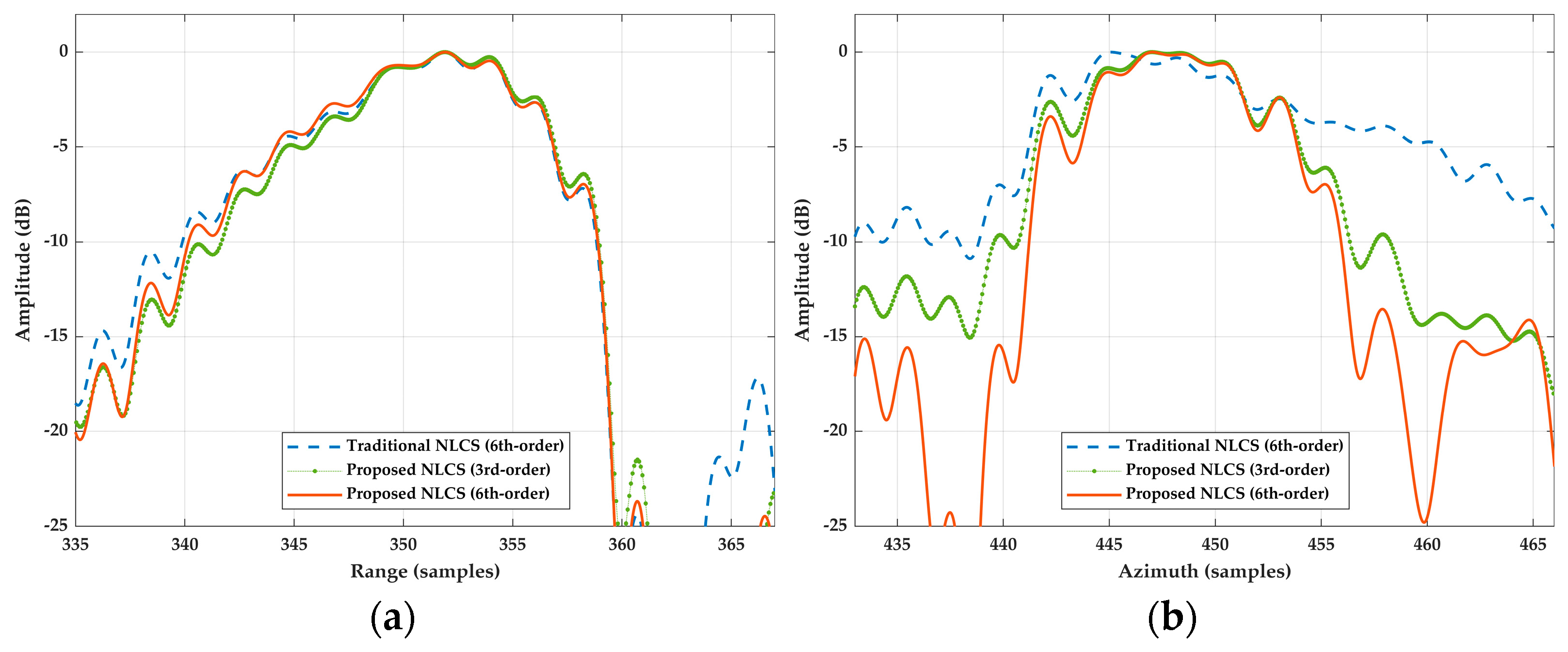
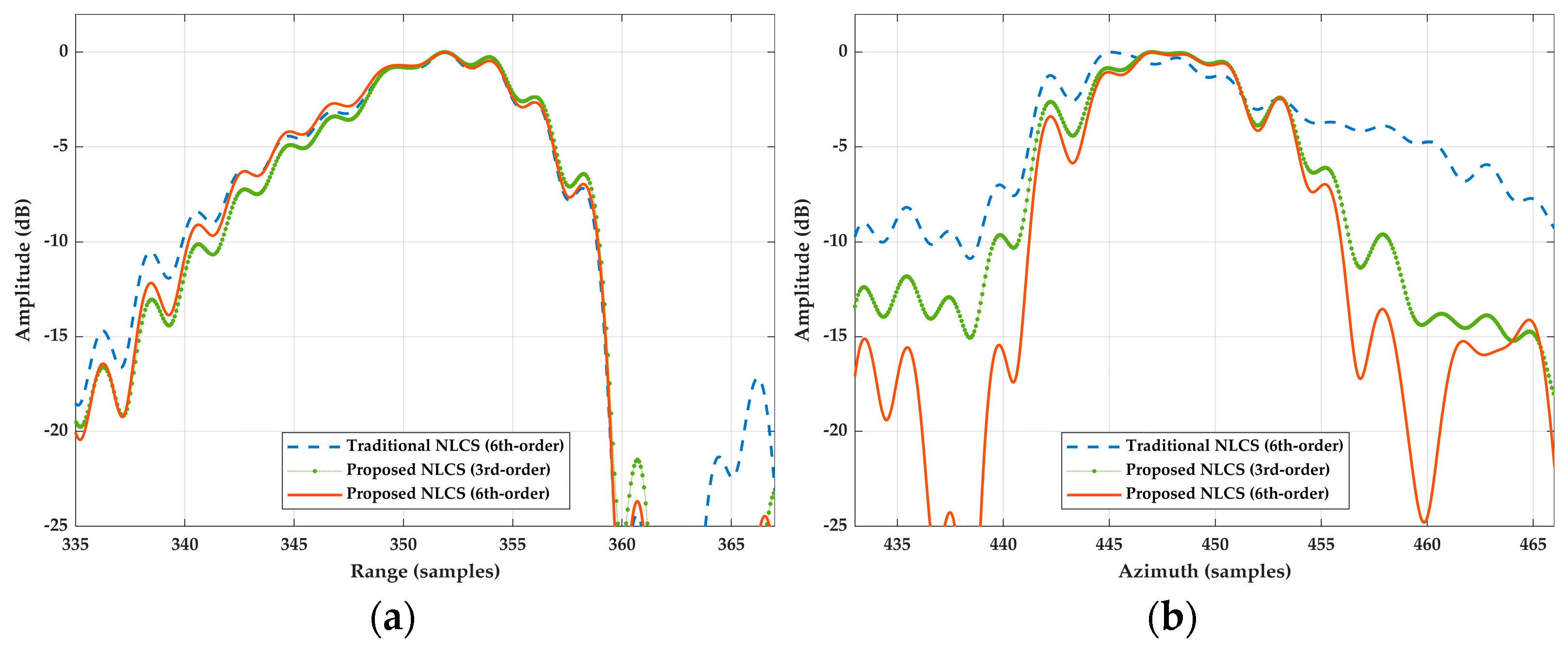
4.1. Experiment for Point Targets
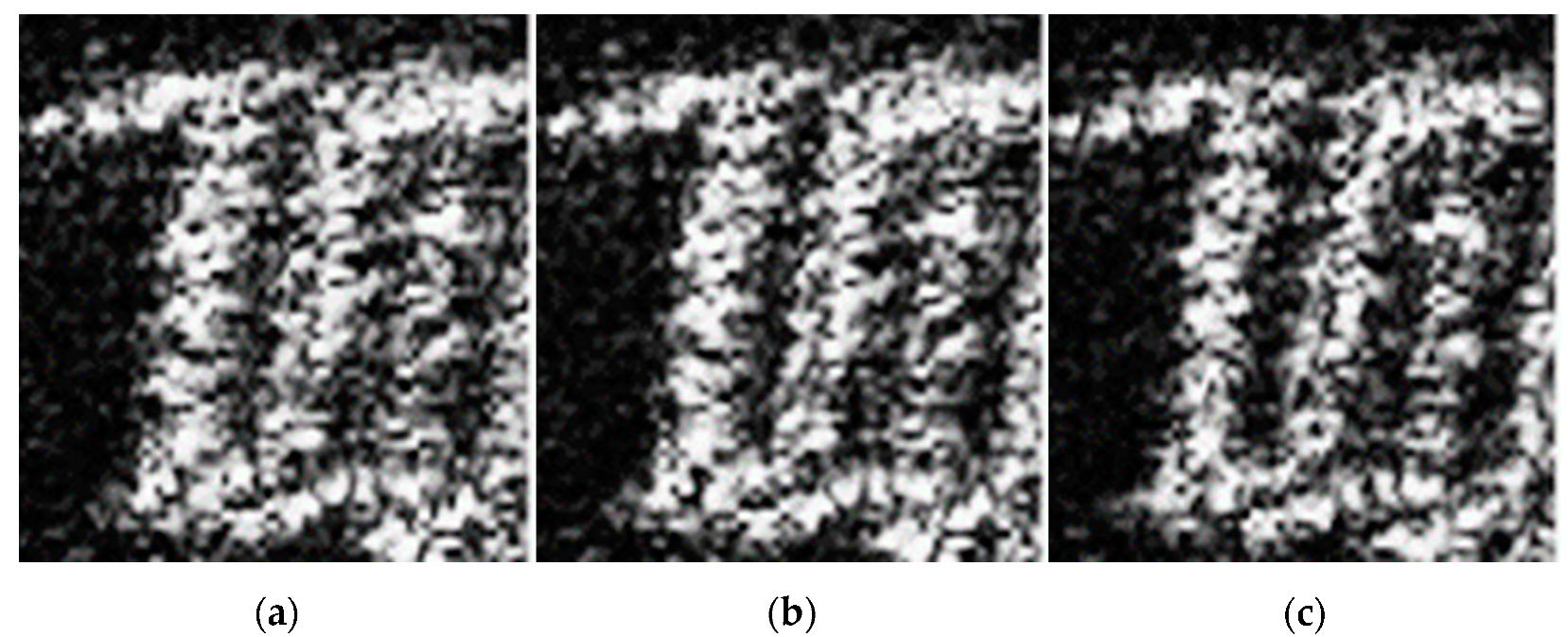
4.2. Experiment for Natural Oceanic Scenes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hass, F.S.; Jokar Arsanjani, J. Deep Learning for Detecting and Classifying Ocean Objects: Application of YoloV3 for Iceberg–Ship Discrimination. ISPRS Int. J. Geo-Inf. 2020, 9, 758. [Google Scholar] [CrossRef]
- Dai, Z.; Li, H.; Liu, D.; Wang, C.; Shi, L.; He, Y. SAR Observation of Waves under Ice in the Marginal Ice Zone. J. Mar. Sci. Eng. 2022, 10, 1836. [Google Scholar] [CrossRef]
- Ge, S.; Feng, D.; Song, S.; Wang, J.; Huang, X. Sparse Logistic Regression-Based One-Bit SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5217915. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Barmettler, A.; Flood, B.; Frölind, P.-O.; Gustavsson, A.; Jonsson, T.; Meier, E.; Rasmusson, J.; Stenström, G. Signal-to-Clutter Ratio Enhancement in Bistatic Very High Frequency (VHF)-Band SAR Images of Truck Vehicles in Forested and Urban Terrain. IET Radar Sonar Navig. 2010, 4, 438. [Google Scholar] [CrossRef]
- Gao, G.; Yao, L.; Li, W.; Zhang, L.; Zhang, M. Onboard Information Fusion for Multisatellite Collaborative Observation: Summary, Challenges, and Perspectives. IEEE Geosci. Remote Sens. Mag. 2023, 11, 40–59. [Google Scholar] [CrossRef]
- Dong, X.; Xiong, W.; Zhang, Y.; Hu, C.; Liu, F. A Novel Geosynchronous Spaceborne-Airborne Bistatic Multichannel Sar For Ground Moving Targets Indication. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 3499–3502. [Google Scholar]
- Maslikowski, L.; Samczynski, P.; Baczyk, M.; Krysik, P.; Kulpa, K. Passive Bistatic SAR Imaging—Challenges and Limitations. IEEE Aerosp. Electron. Syst. Mag. 2014, 29, 23–29. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Z.; An, H.; Qu, J.; Yang, J. Azimuth Signal Multichannel Reconstruction and Channel Configuration Design for Geosynchronous Spaceborne–Airborne Bistatic SAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1861–1872. [Google Scholar] [CrossRef]
- Patel, N. Open Source Data Programs From Low-Earth Orbit Synthetic Aperture Radar Companies: Questions and Answers [Industry Profiles and Activities]. IEEE Geosci. Remote Sens. Mag. 2023, 11, 171–173. [Google Scholar] [CrossRef]
- Feng, D.; An, D.; Wang, J.; Chen, L.; Huang, X. A Focusing Method of Buildings for Airborne Circular SAR. Remote Sens. 2024, 16, 253. [Google Scholar] [CrossRef]
- Xie, H.; Chen, L.; An, D.; Huang, X.; Zhou, Z. Back-Projection Algorithm Based on Elliptical Polar Coordinate for Low Frequency Ultra Wide Band One-Stationary Bistatic SAR Imaging. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; Volume 3, pp. 1984–1988. [Google Scholar]
- Yegulalp, A.F. Fast Backprojection Algorithm for Synthetic Aperture Radar. In Proceedings of the Proceedings of the 1999 IEEE Radar Conference, Waltham, MA, USA, 22 April 1999; pp. 60–65. [Google Scholar]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-Aperture Radar Processing Using Fast Factorized Back-Projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Loffeld, O.; Nies, H.; Peters, V.; Knedlik, S. Models and Useful Relations for Bistatic SAR Processing. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2031–2038. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.H.; Cumming, I.G. Processing of Azimuth-Invariant Bistatic SAR Data Using the Range Doppler Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 14–21. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing Bistatic SAR Data Using the Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- Liu, B.; Wang, T.; Wu, Q.; Bao, Z. Bistatic SAR Data Focusing Using an Omega-K Algorithm Based on Method of Series Reversion. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2899–2912. [Google Scholar] [CrossRef]
- Wong, F.W.; Yeo, T.S. New Applications of Nonlinear Chirp Scaling in SAR Data Processing. IEEE Trans. Geosci. Remote Sens. 2001, 39, 946–953. [Google Scholar] [CrossRef]
- Liu, G.G.; Zhang, L.R.; Liu, X. General Bistatic SAR Data Processing Based on Extended Nonlinear Chirp Scaling. IEEE Geosci. Remote Sens. Lett. 2013, 10, 976–980. [Google Scholar]
- Li, D.; Liao, G.; Wang, W.; Xu, Q. Extended Azimuth Nonlinear Chirp Scaling Algorithm for Bistatic SAR Processing in High-Resolution Highly Squinted Mode. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1134–1138. [Google Scholar] [CrossRef]
- Wang, W.; Liao, G.; Li, D.; Xu, Q. Focus Improvement of Squint Bistatic SAR Data Using Azimuth Nonlinear Chirp Scaling. IEEE Geosci. Remote Sens. Lett. 2014, 11, 229–233. [Google Scholar] [CrossRef]
- Zhong, H.; Zhang, Y.; Chang, Y.; Liu, E.; Tang, X.; Zhang, J. Focus High-Resolution Highly Squint SAR Data Using Azimuth-Variant Residual RCMC and Extended Nonlinear Chirp Scaling Based on a New Circle Model. IEEE Geosci. Remote Sens. Lett. 2018, 15, 547–551. [Google Scholar] [CrossRef]
- Liang, M.; Su, W.; Gu, H. Focusing High-Resolution High Forward-Looking Bistatic SAR With Nonequal Platform Velocities Based on Keystone Transform and Modified Nonlinear Chirp Scaling Algorithm. IEEE Sens. J. 2019, 19, 901–908. [Google Scholar] [CrossRef]
- Li, C.; Zhang, H.; Deng, Y. Focus Improvement of Airborne High-Squint Bistatic SAR Data Using Modified Azimuth NLCS Algorithm Based on Lagrange Inversion Theorem. Remote Sens. 2021, 13, 1916. [Google Scholar] [CrossRef]
- An, H.; Wu, J.; Sun, Z.; Yang, J. A Two-Step Nonlinear Chirp Scaling Method for Multichannel GEO Spaceborne–Airborne Bistatic SAR Spectrum Reconstructing and Focusing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3713–3728. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, M.; Ai, G.; Wang, P.; Lv, K. Focusing of Bistatic SAR With Curved Trajectory Based on Extended Azimuth Nonlinear Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4160–4179. [Google Scholar] [CrossRef]
- Xi, Z.; Duan, C.; Zuo, W.; Li, C.; Huo, T.; Li, D.; Wen, H. Focus Improvement of Spaceborne-Missile Bistatic SAR Data Using the Modified NLCS Algorithm Based on the Method of Series Reversion. Remote Sens. 2022, 14, 5770. [Google Scholar] [CrossRef]
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Li, D.; Lin, H.; Liu, H.; Liao, G.; Tan, X. Focus Improvement for High-Resolution Highly Squinted SAR Imaging Based on 2-D Spatial-Variant Linear and Quadratic RCMs Correction and Azimuth-Dependent Doppler Equalization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 168–183. [Google Scholar] [CrossRef]
- Zhang, S.; Long, T.; Zeng, T.; Ding, Z. Space-Borne Synthetic Aperture Radar Received Data Simulation Based on Airborne SAR Image Data. Adv. Space Res. 2008, 41, 1818–1821. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A High-Resolution SAR Images Dataset for Ship Detection and Instance Segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values | |
|---|---|---|---|---|
| BiSAR system | Center frequency | 700 MHz | Bandwidth | 150 MHz |
| Pulse duration | 1 μs | Sampling frequency | 180 MHz | |
| PRF | 172 Hz | Synthetic aperture time | 7.08 s | |
| GEO satellite | Orbital semi-major axis | 42,164 km | Orbital eccentricity | 0.006 |
| Initial coordinates | (0, 0, 35,753) km | Equivalent velocity | 600 m/s | |
| Receiver | Height | 1000 m | X-axis velocity | 40 m/s |
| Squint angle | 16° | Y-axis velocity | 300 m/s | |
| Initial coordinates | (4000, 0, 1000) m | Angle | 7.59° |
| Range | Azimuth | ||||||
|---|---|---|---|---|---|---|---|
| IRW (m) | PSLR (dB) | ISLR (dB) | IRW (m) | PSLR (dB) | ISLR (dB) | ||
| P1 | Traditional NLCS (6th order) | 0.99 | −12.40 | −9.73 | 5.75 | −2.49 | −4.71 |
| Proposed NLCS (3rd order) | 1.00 | −13.02 | −10.65 | 2.09 | −9.49 | −8.18 | |
| Proposed NLCS (6th order) | 1.00 | −13.42 | −11.27 | 2.03 | −13.63 | −11.48 | |
| P13 | Traditional NLCS (6th order) | 1.00 | −13.05 | −10.42 | 2.12 | −13.35 | −11.00 |
| Proposed NLCS (3rd order) | 1.00 | −13.05 | −10.43 | 2.13 | −13.30 | −10.73 | |
| Proposed NLCS (6th order) | 1.00 | −13.05 | −10.43 | 2.12 | −13.36 | −11.01 | |
| P25 | Traditional NLCS (6th order) | 1.03 | −13.79 | −11.25 | 3.24 | −3.78 | −5.80 |
| Proposed NLCS (3rd order) | 1.00 | −13.61 | −11.23 | 2.34 | −10.09 | −8.82 | |
| Proposed NLCS (6th order) | 1.00 | −13.38 | −10.88 | 2.24 | −13.10 | −11.13 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Xie, H.; Yi, S.; Zhang, L.; Lu, Z. An Improved NLCS Algorithm Based on Series Reversion and Elliptical Model Using Geosynchronous Spaceborne–Airborne UHF UWB Bistatic SAR for Oceanic Scene Imaging. Remote Sens. 2024, 16, 1131. https://doi.org/10.3390/rs16071131
Hu X, Xie H, Yi S, Zhang L, Lu Z. An Improved NLCS Algorithm Based on Series Reversion and Elliptical Model Using Geosynchronous Spaceborne–Airborne UHF UWB Bistatic SAR for Oceanic Scene Imaging. Remote Sensing. 2024; 16(7):1131. https://doi.org/10.3390/rs16071131
Chicago/Turabian StyleHu, Xiao, Hongtu Xie, Shiliang Yi, Lin Zhang, and Zheng Lu. 2024. "An Improved NLCS Algorithm Based on Series Reversion and Elliptical Model Using Geosynchronous Spaceborne–Airborne UHF UWB Bistatic SAR for Oceanic Scene Imaging" Remote Sensing 16, no. 7: 1131. https://doi.org/10.3390/rs16071131
APA StyleHu, X., Xie, H., Yi, S., Zhang, L., & Lu, Z. (2024). An Improved NLCS Algorithm Based on Series Reversion and Elliptical Model Using Geosynchronous Spaceborne–Airborne UHF UWB Bistatic SAR for Oceanic Scene Imaging. Remote Sensing, 16(7), 1131. https://doi.org/10.3390/rs16071131