
The Mapping of Alpha-Emitting Radionuclides in the Environment Using an Unmanned Aircraft System

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Hardware Architecture
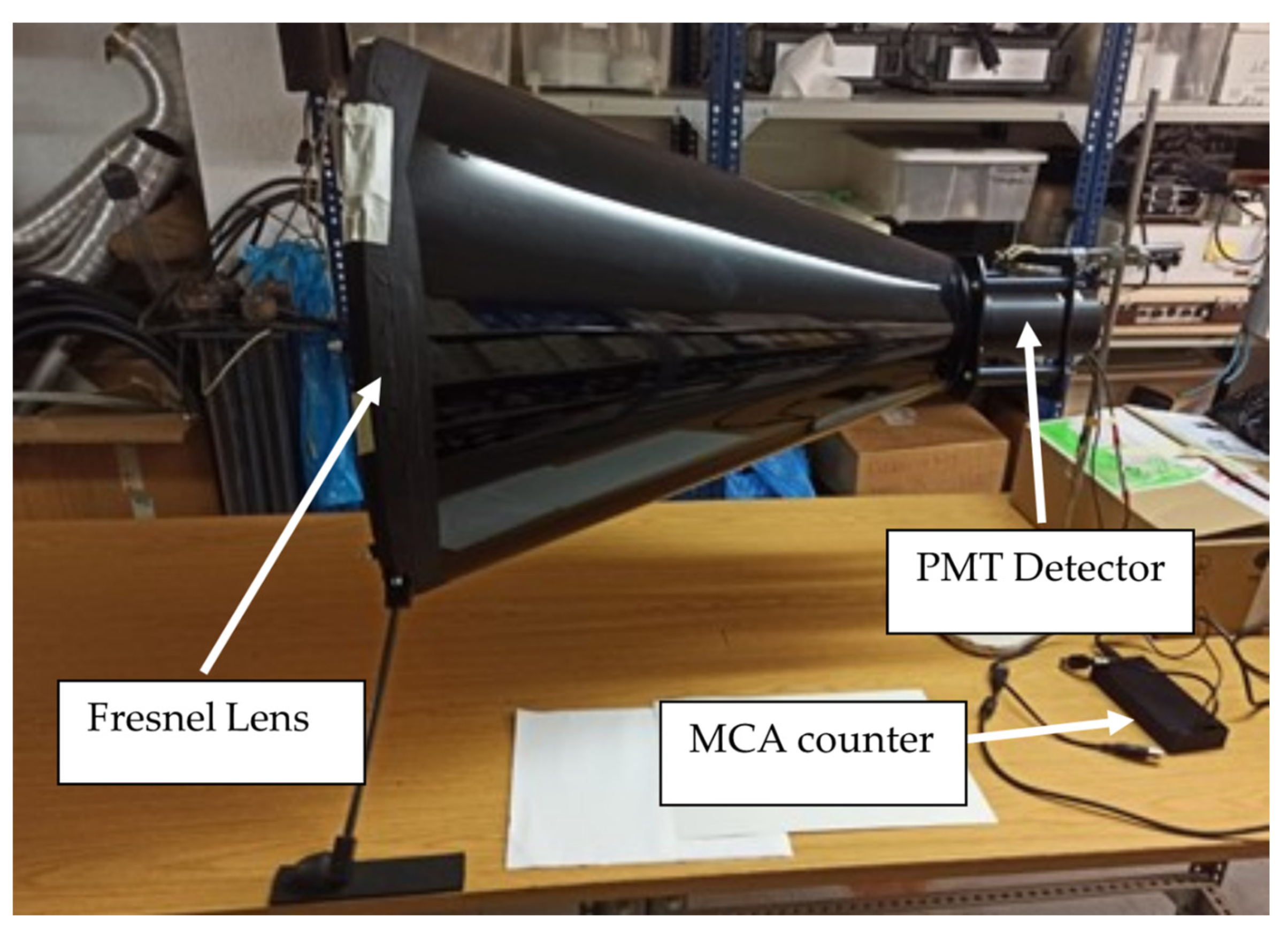
2.1.1. Detector
2.1.2. Characterization of the Detector
2.1.3. Unmanned Aircraft System (UAS)
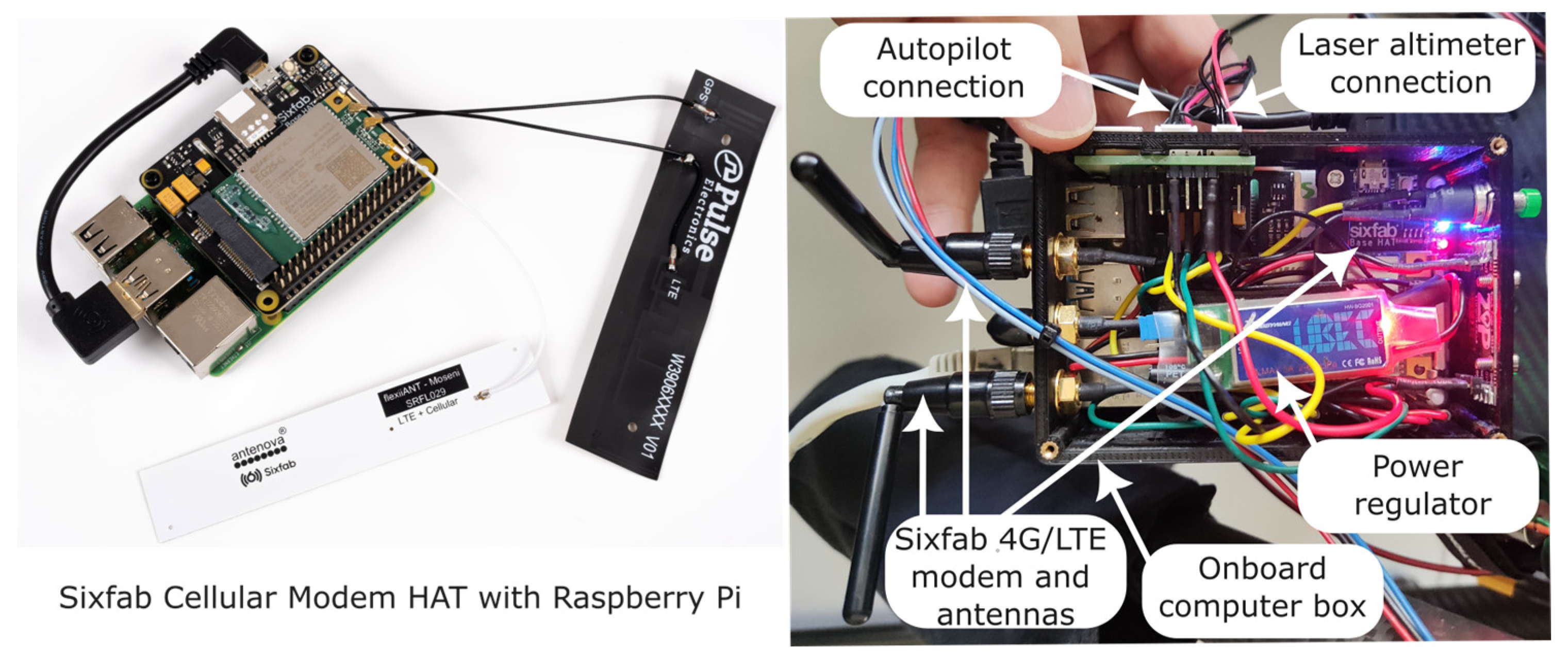
2.1.4. Onboard Computer and Air–Ground Communications
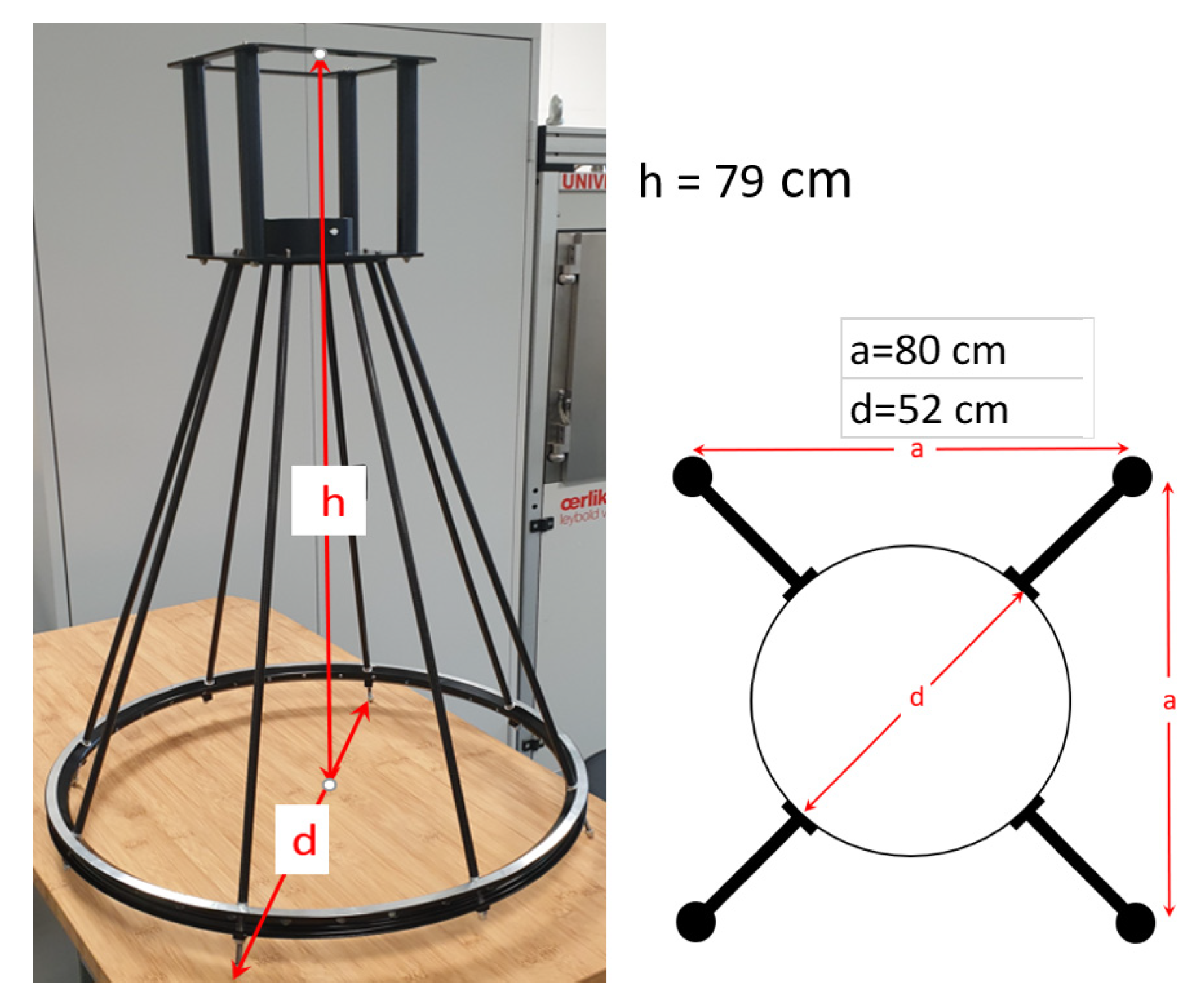
2.1.5. Hardware Integration with the UAS
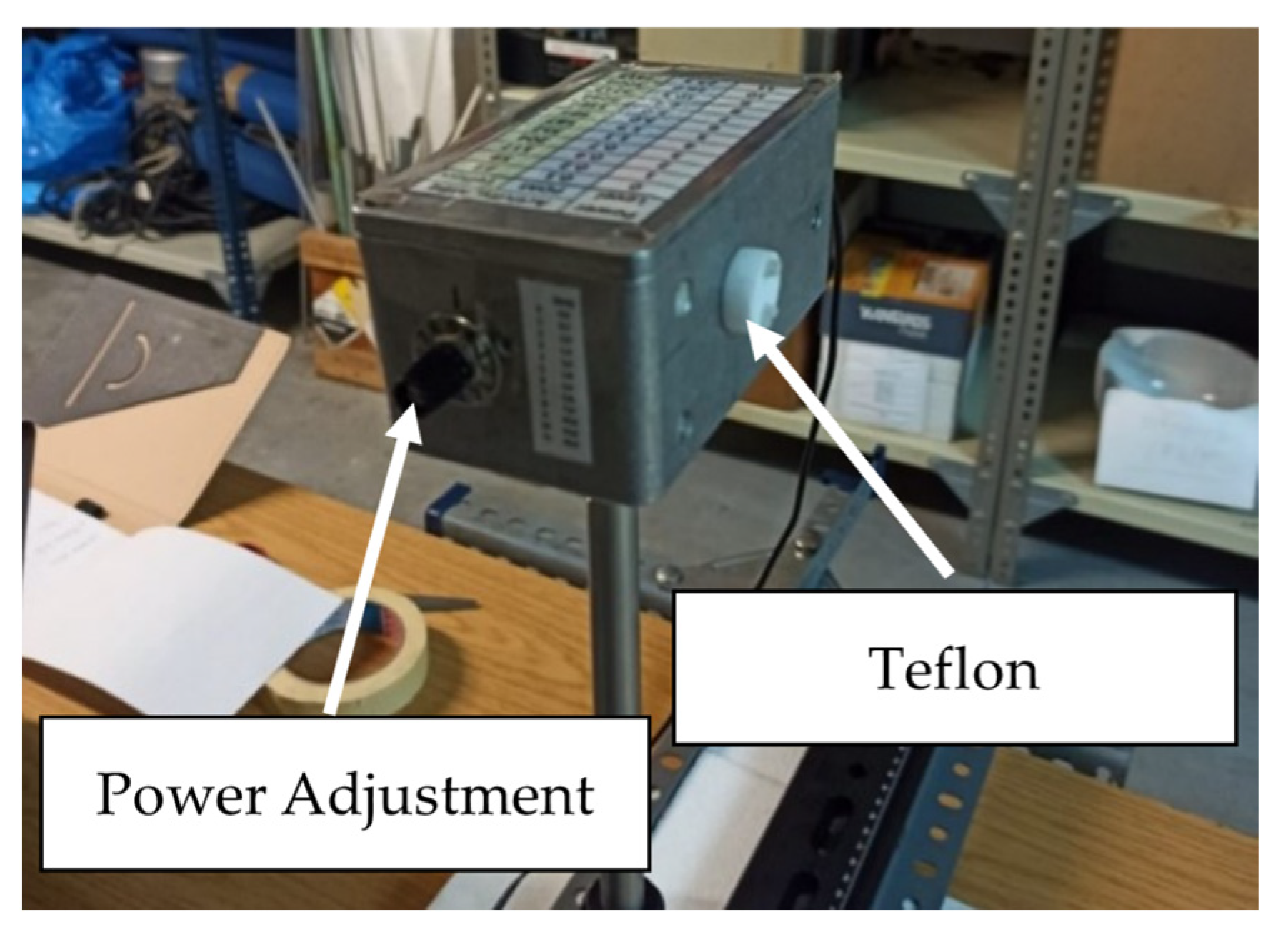
2.2. UV Sources
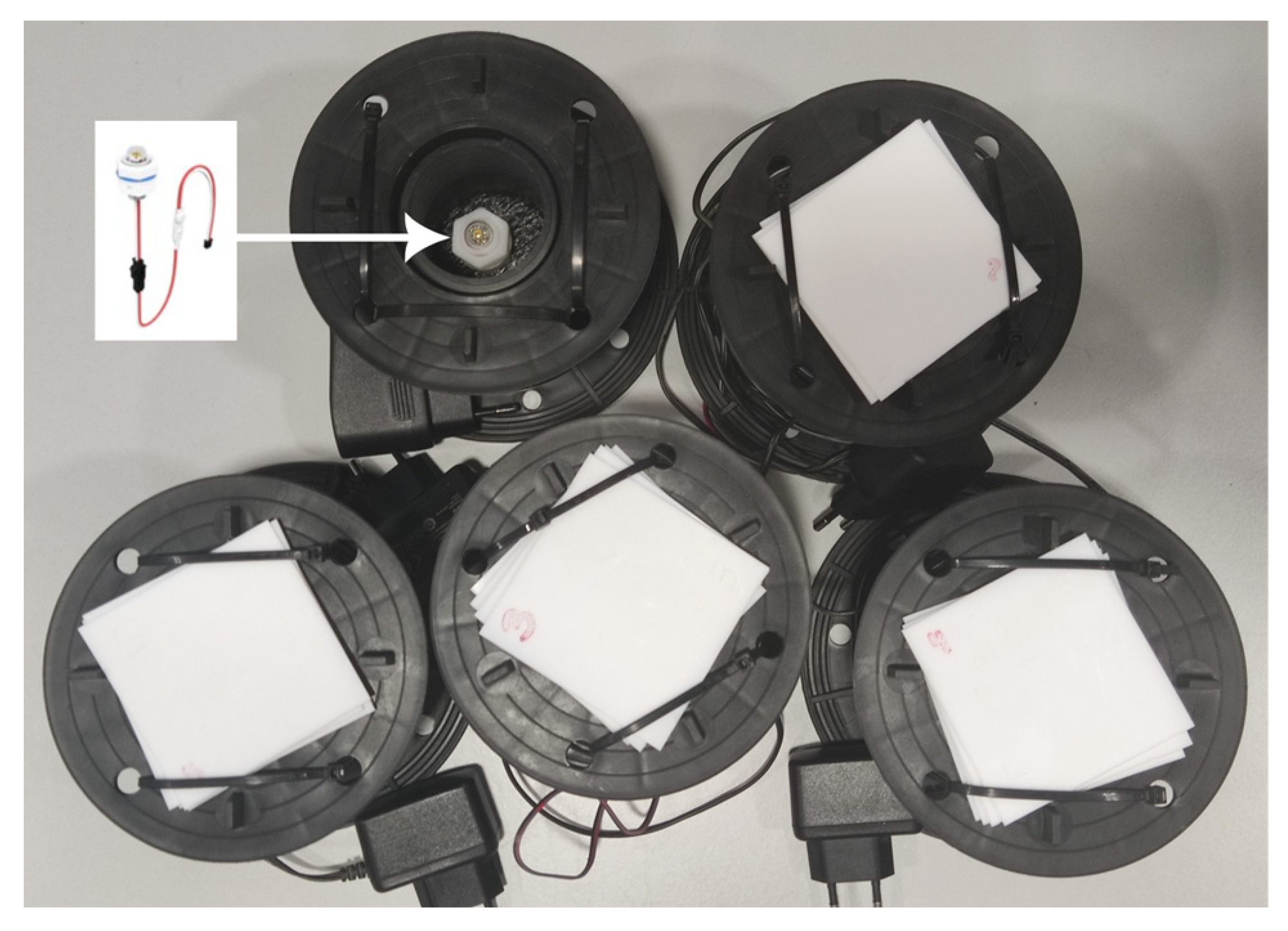
2.2.1. UV-C LED Sources
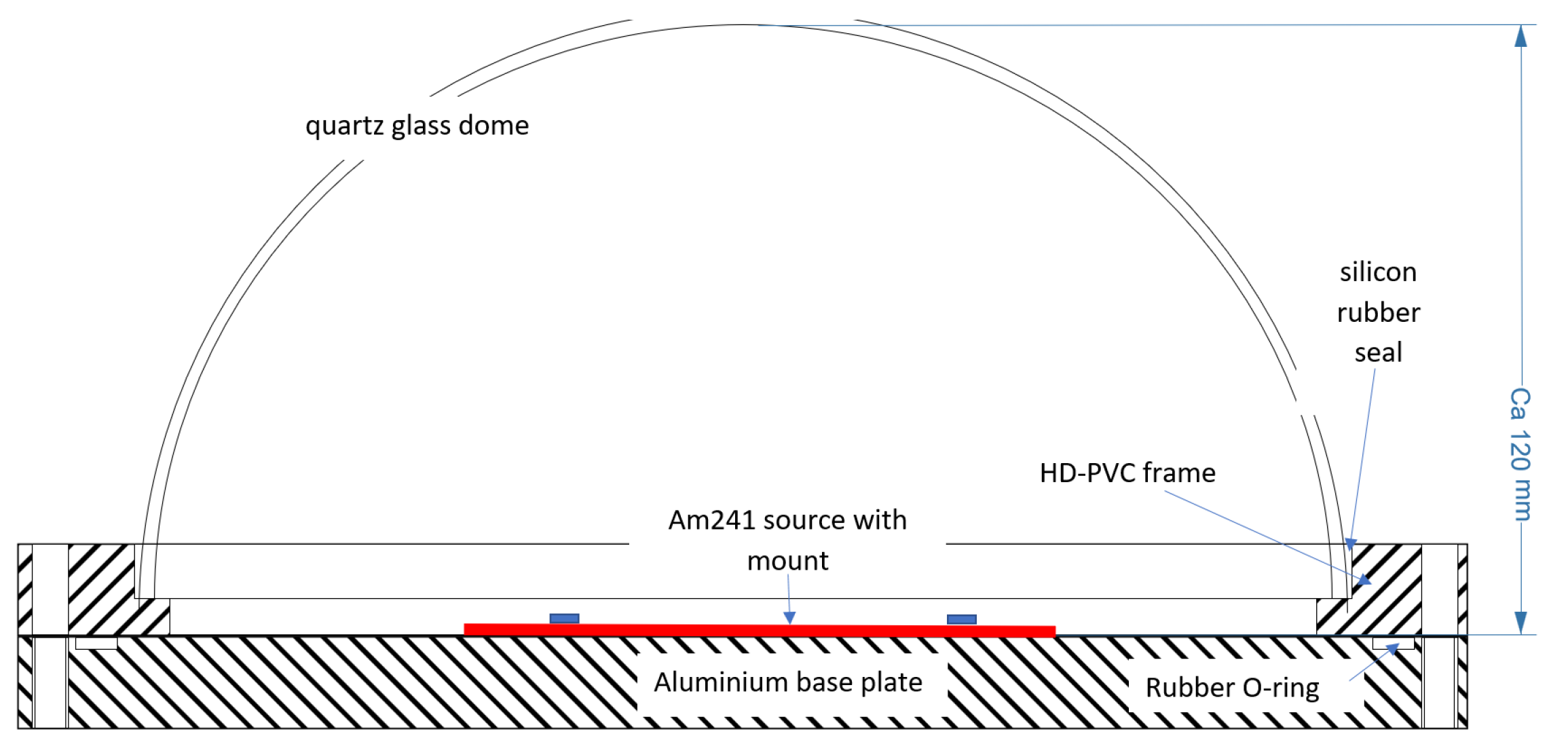
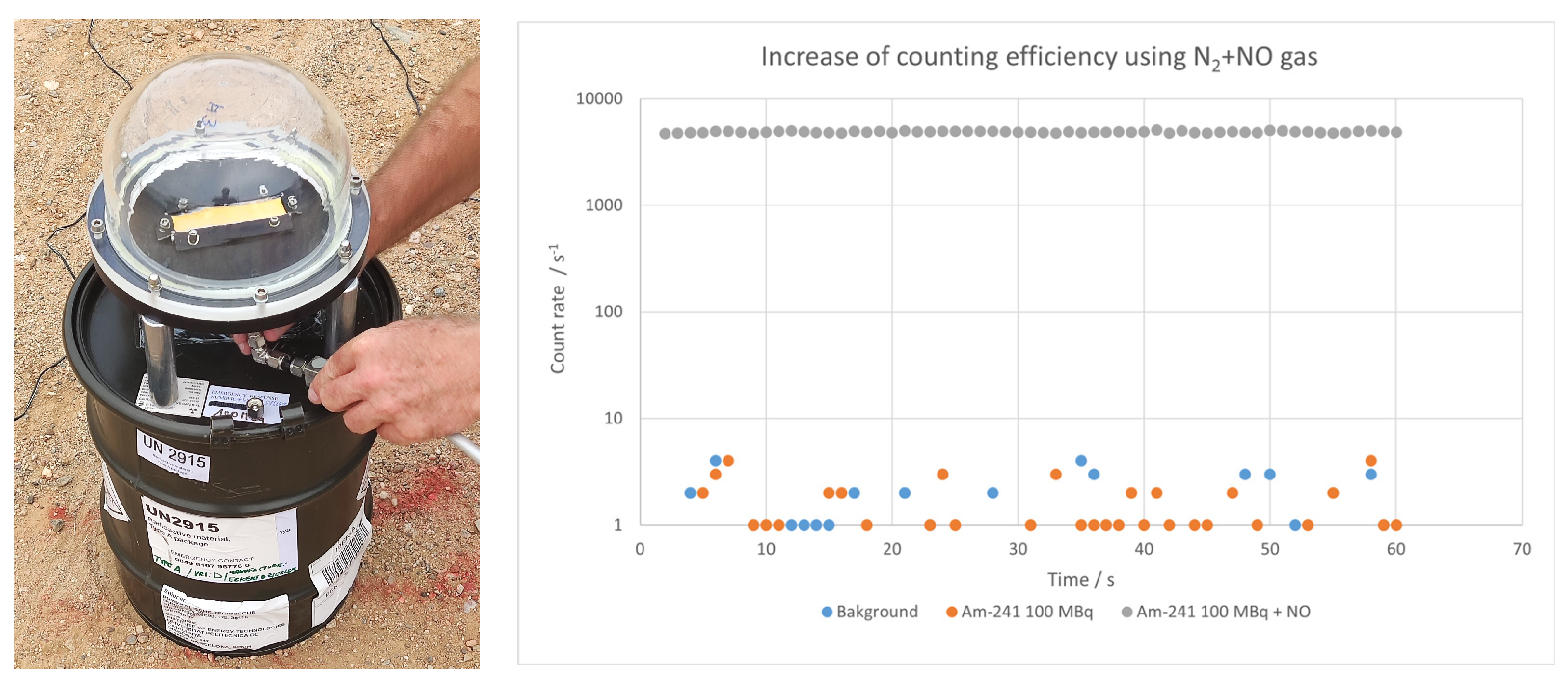
2.2.2. Americium Source
- Active dimensions: 20 mm × 100 mm.
- Overall dimensions: 30 mm × 100 mm.
2.3. Software Architecture
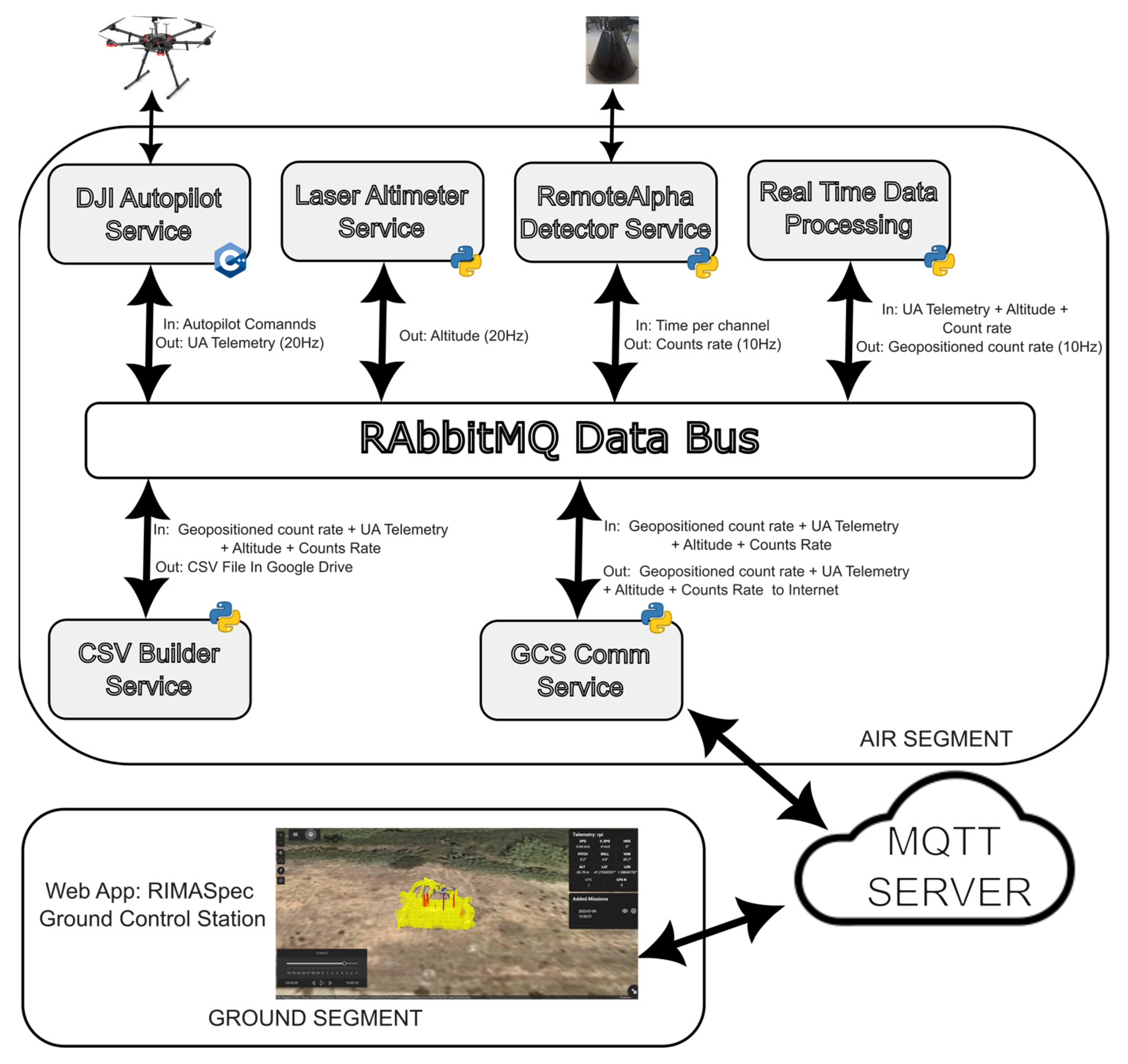
2.3.1. Air Segment Software Architecture
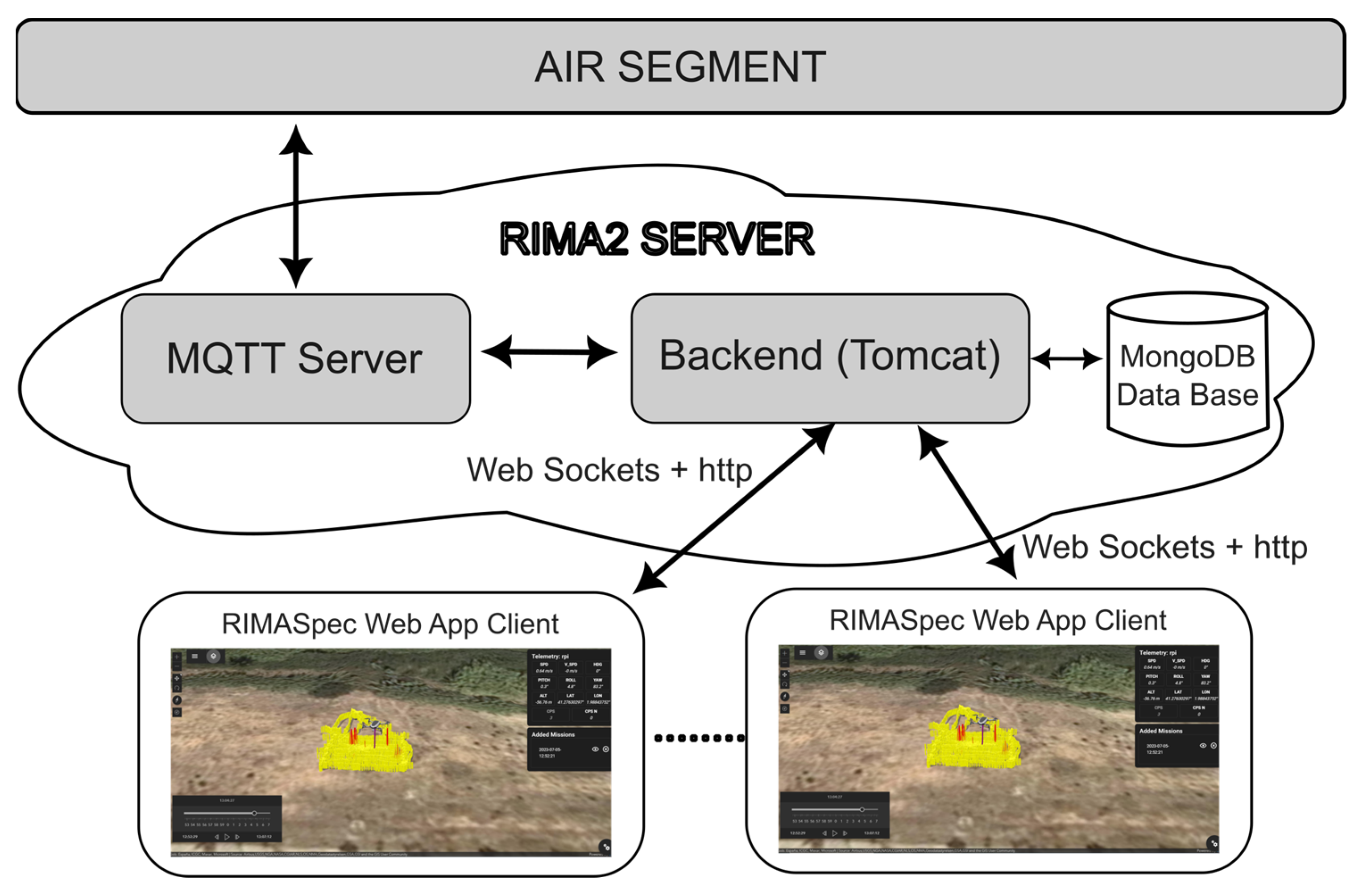
2.3.2. Ground Segment Software Architecture
3. Results and Discussion
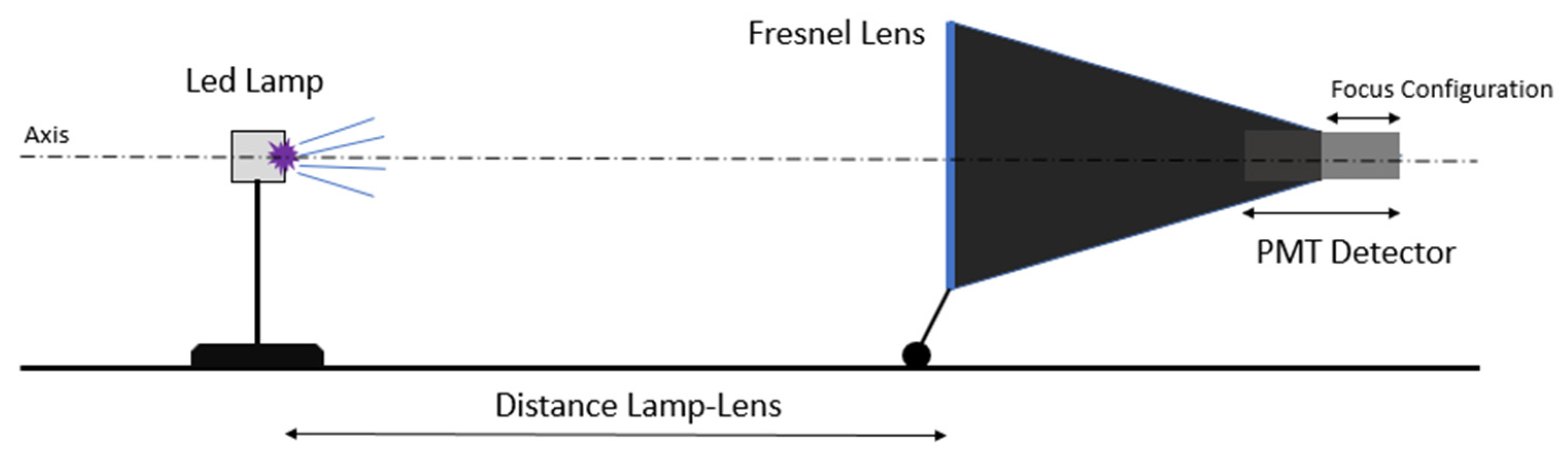
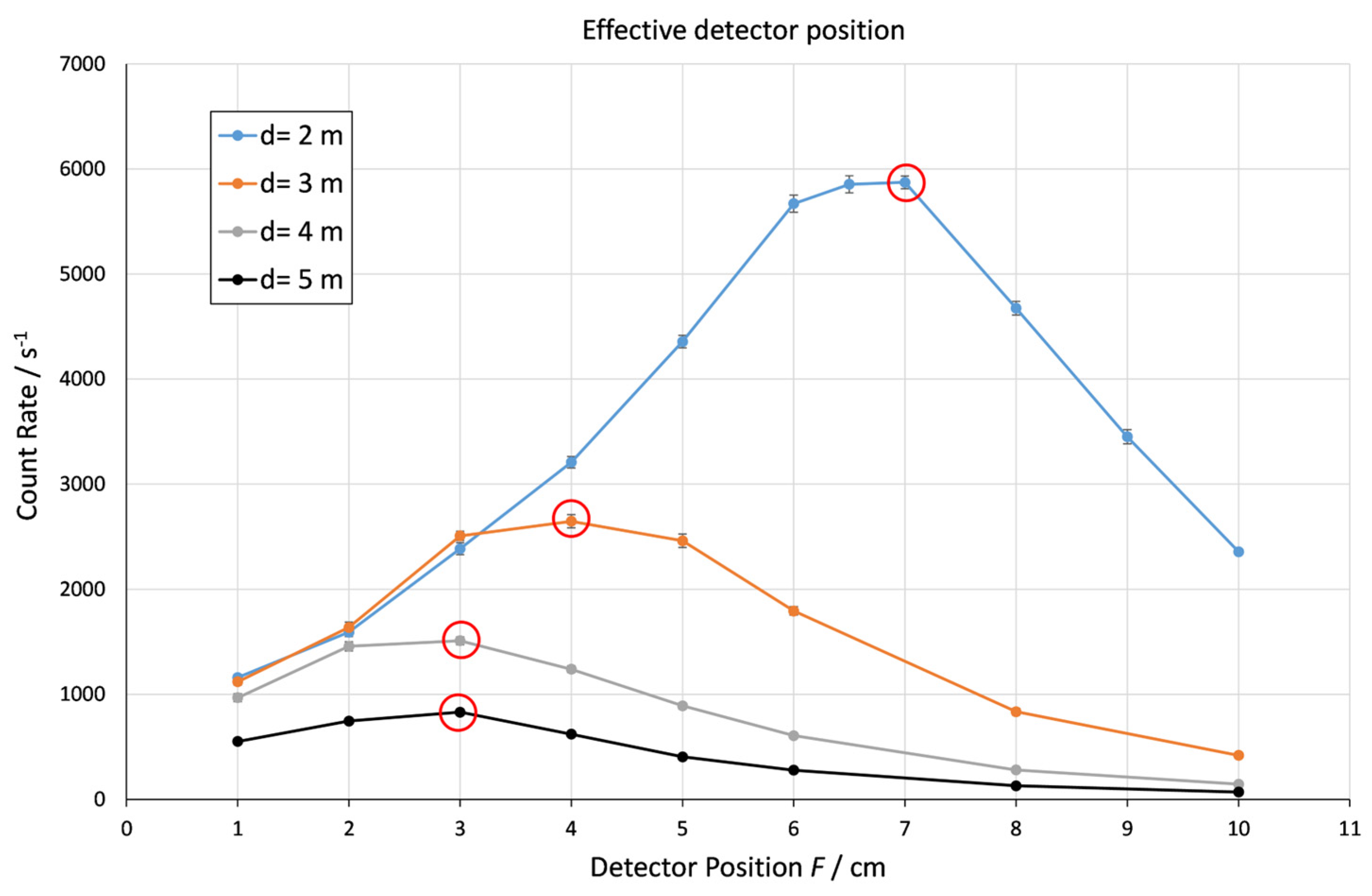
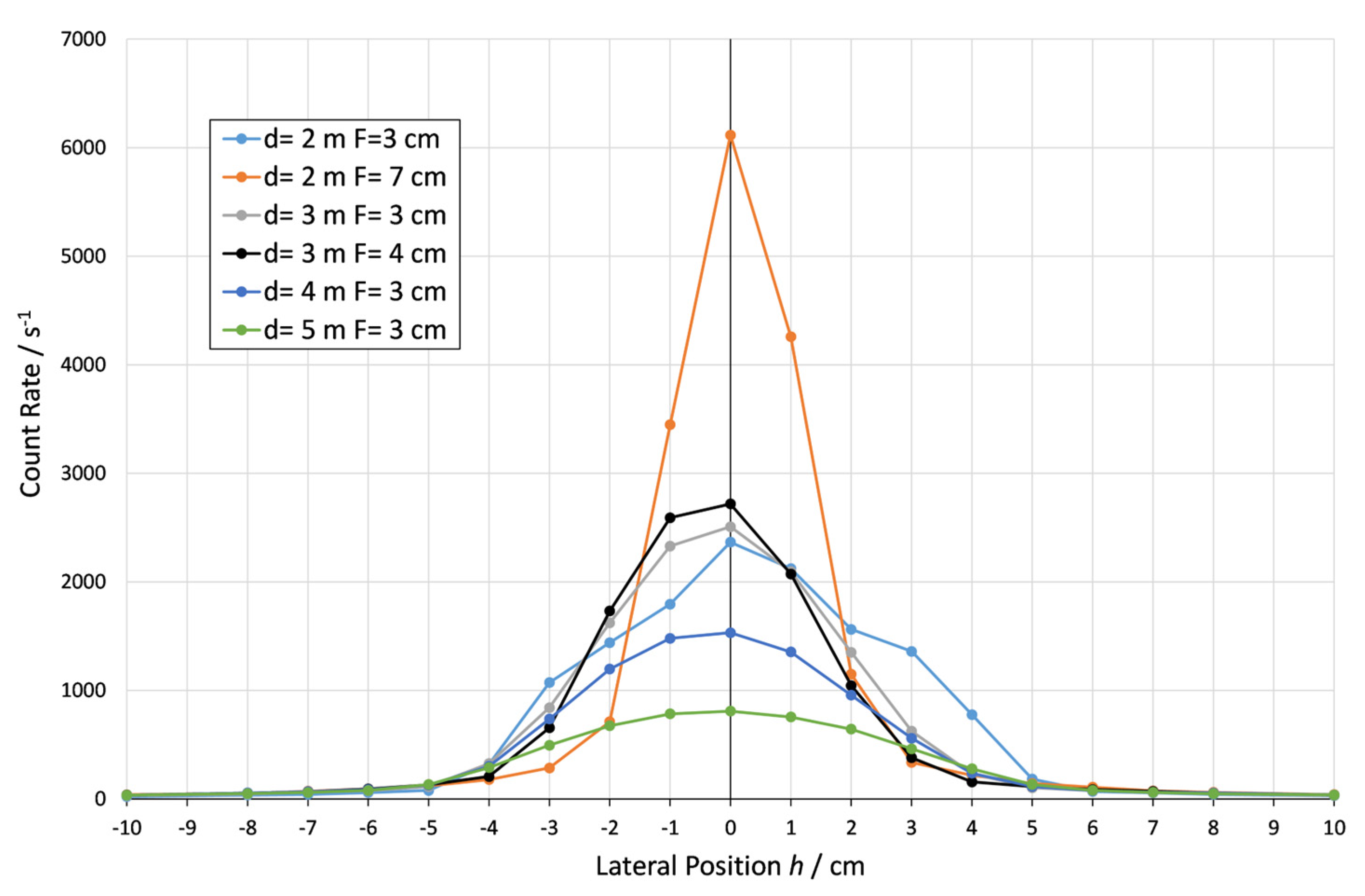
3.1. Focus Configuration and the Field of View
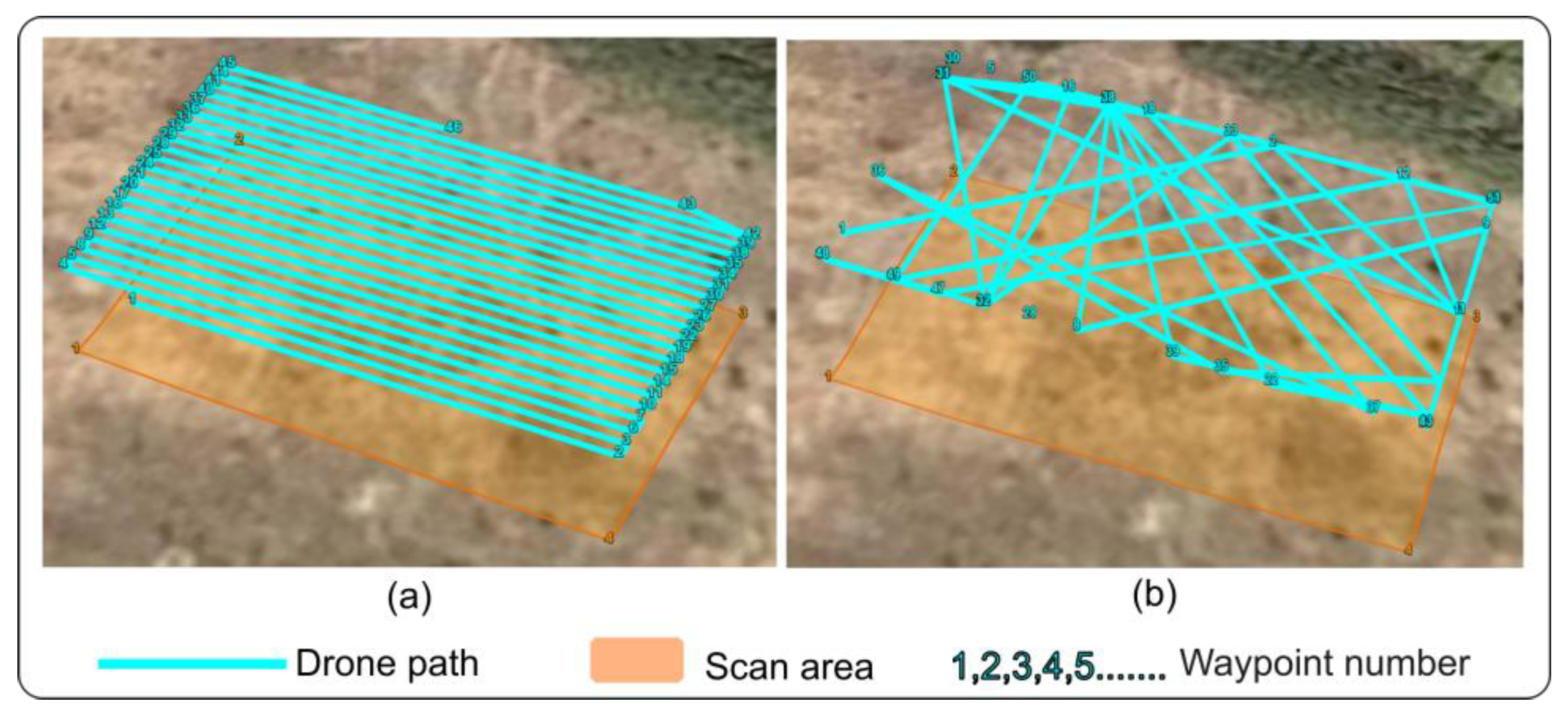
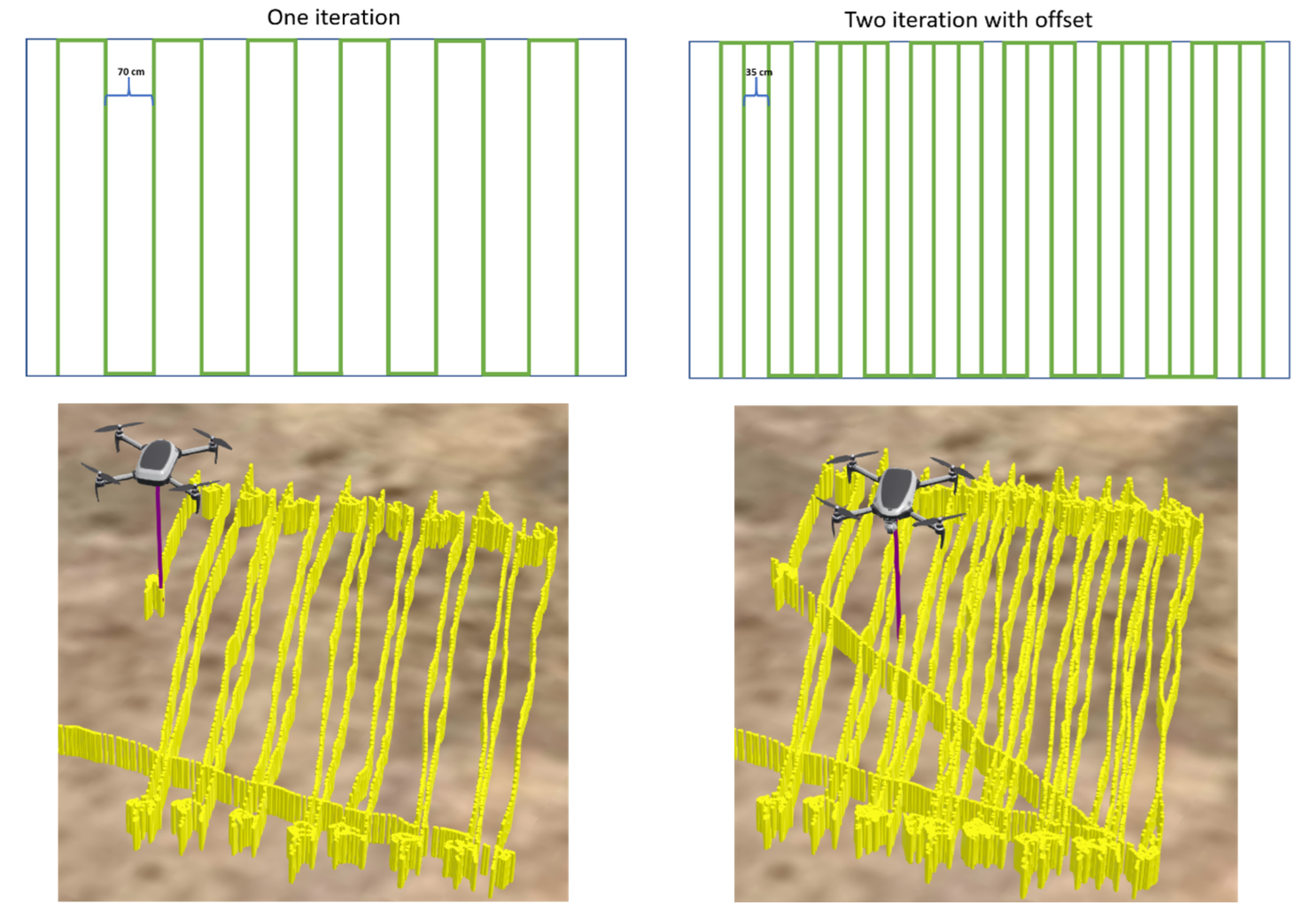
3.2. Optimal Flight Plans for Localization and Mapping of Alpha Emitters
- Speed: 1 m s−1;
- Altitude above ground level: 5 m;
- Distance between parallel lines: 70 cm;
- Detector integration time: 0.1 s;
- Scan pattern type: back and forth;
- If the sources are not detected in the first iteration of the flight plan, a second iteration with an offset will be performed.
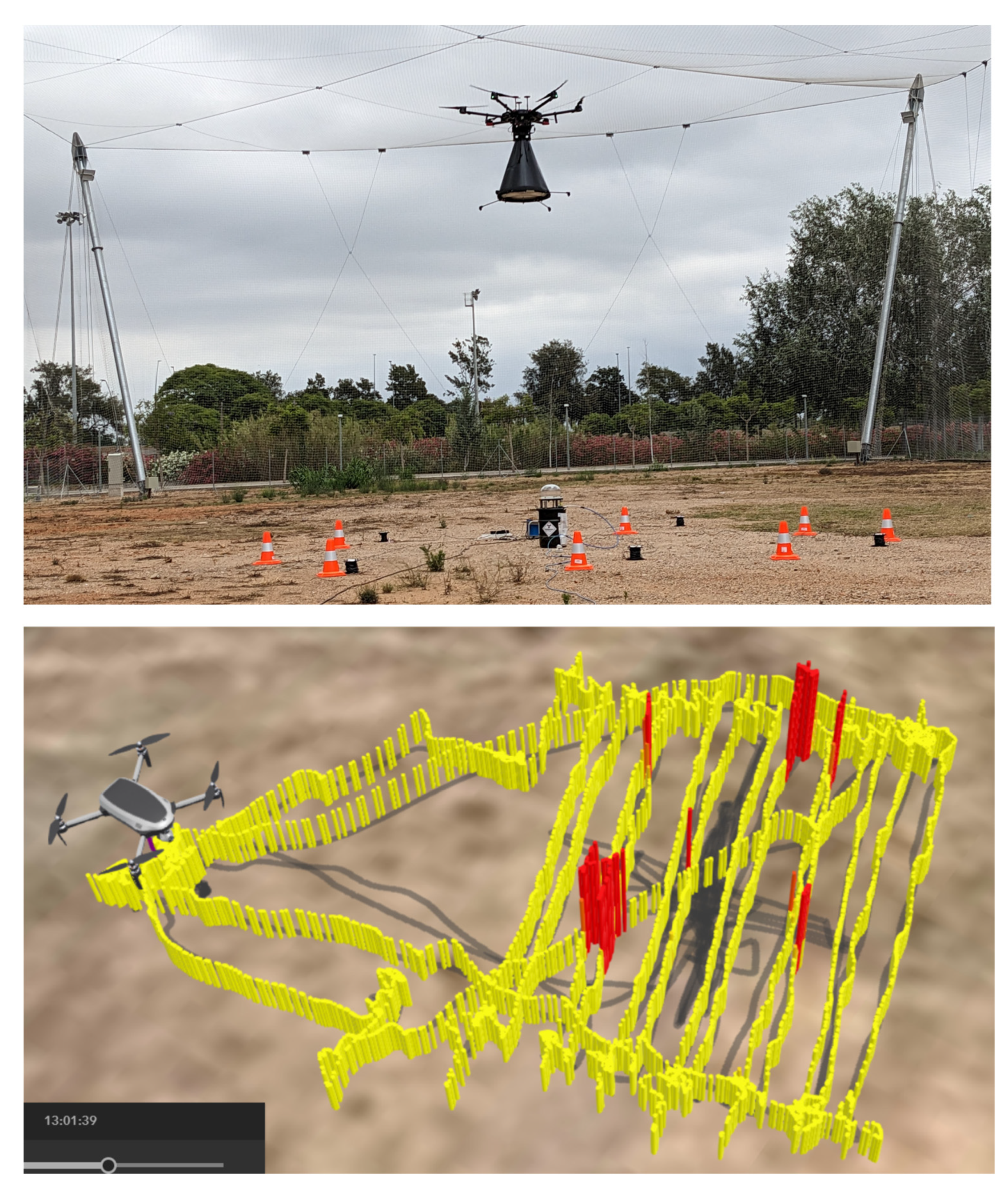
3.3. Defining and Preparing the Flight Area
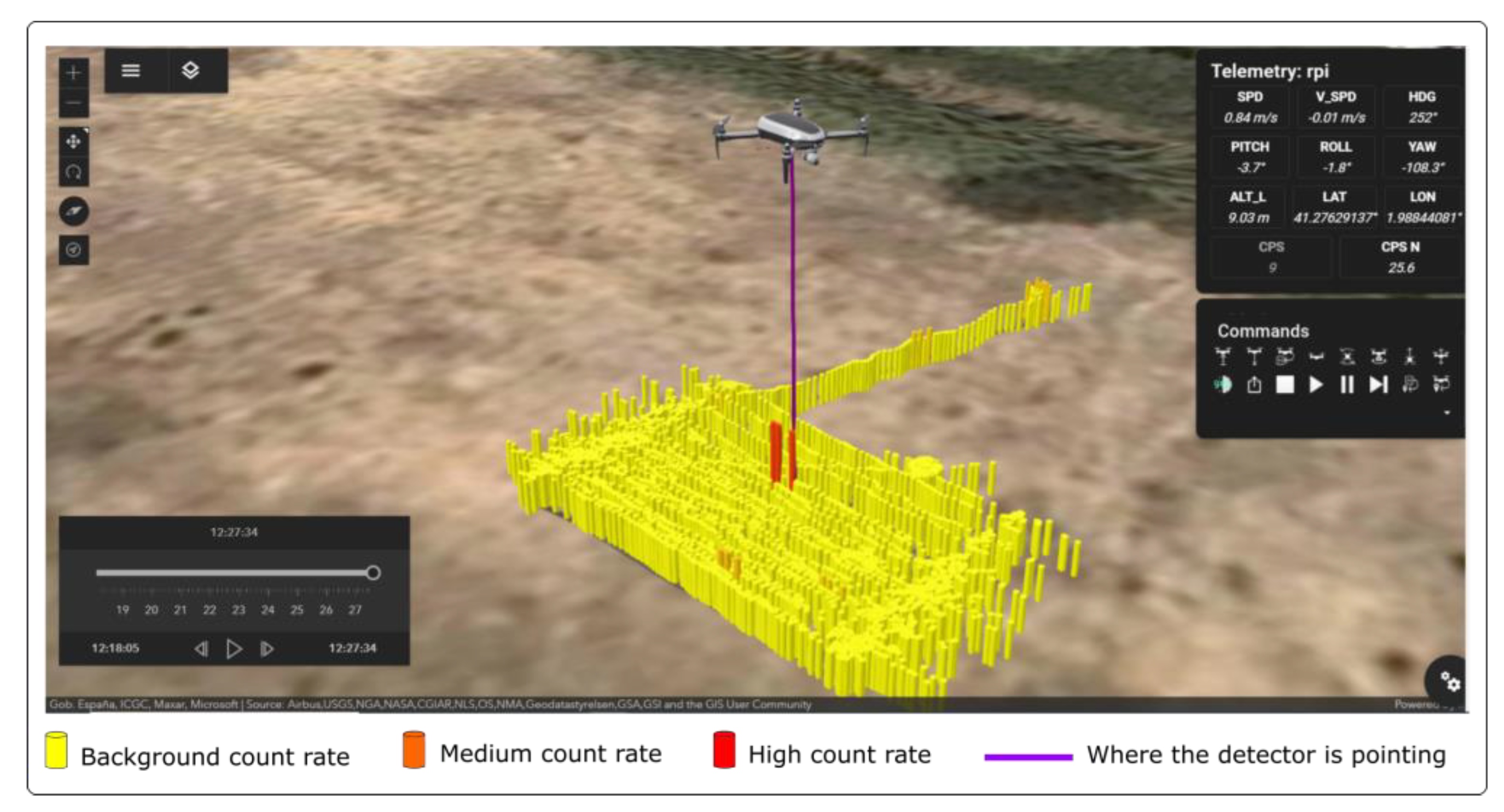
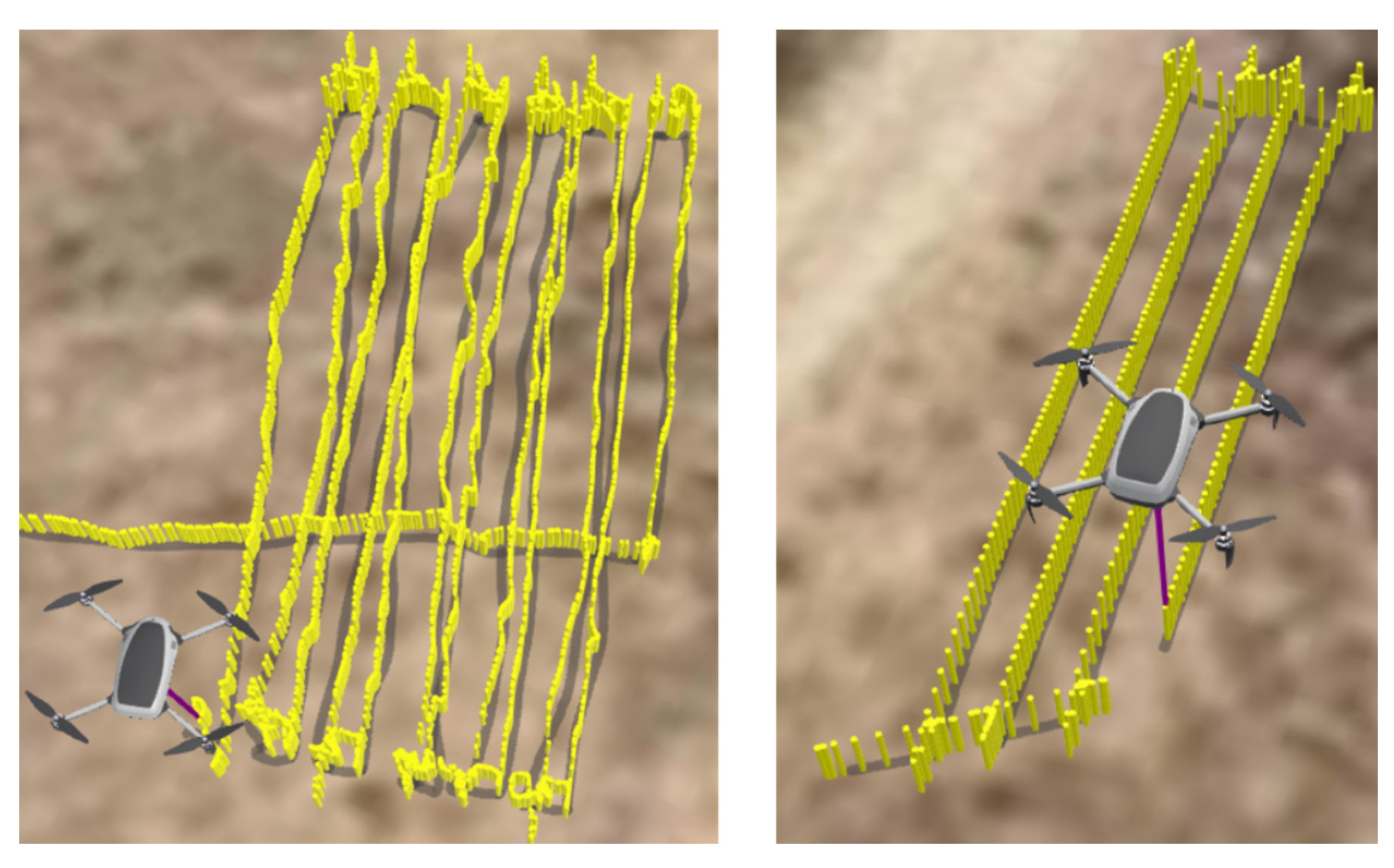
3.4. Flight Test with LEDs and 241Am Source
4. Conclusions
- The Fresnel lens detection system used to measure alpha-induced radioluminescence is relatively large. This is because maximizing the radioluminescence throughput while minimizing the background signal requires a compromise between the diameter of the receiving optics (which determines the geometric efficiency of the system) and the focal length (which determines the FOV, which subsequently affects both the number of detected photons and filtering [17]).
- The detector’s size makes the drone integration difficult, which means it can only be integrated into medium- and large-sized UASs, with the sensor itself acting as the landing gear. The lens, located at the aircraft’s underbelly, deep below its center of gravity, resists UAS movement. Flight tests conducted in windy conditions revealed significant instabilities in the UAS’s flight. It is not advisable to exchange the landing gear supplied by the manufacturer for incorporating the detector. Therefore, in future iterations, a compact detector design must be implemented.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gale, R.P.; Armitage, J.O.; Hashmi, S.K. Emergency response to radiological and nuclear accidents and incidents. Br. J. Haematol. 2021, 192, 968–972. [Google Scholar] [CrossRef] [PubMed]
- Hogan, D.E.; Kellison, T. Nuclear terrorism. Am. J. Med. Sci. 2002, 323, 341–349. [Google Scholar] [CrossRef] [PubMed]
- Royo, P.; Pastor, E.; Macias, M.; Cuadrado, R.; Barrado, C.; Vargas, A. An Unmanned Aircraft System to Detect a Radiological Point Source Using RIMA Software Architecture. Remote Sens. 2018, 10, 1712. [Google Scholar] [CrossRef]
- Vargas, A.; Costa, D.; Macias, M.; Royo, P.; Pastor, E.; Luchkov, M.; Neumaier, S.; Stöhlker, U.; Luff, R. Comparison of airborne radiation detectors carried by rotary-wing unmanned aerial systems. Radiat. Meas. 2021, 145, 106595. [Google Scholar] [CrossRef]
- Podgorsak, E.B. Radiation Physics for Medical Physicists; Springer: Berlin, Germany, 2006. [Google Scholar]
- Burchfield, L.A. Radiation Safety: Protection and Management for Homeland Security and Emergency Response; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Crompton, A.J.; Gamage, K.A.A.; Jenkins, A.; Taylor, C.J. Alpha particle detection using alpha-induced air radioluminescence: A review and future prospects for preliminary radiological characterisation for nuclear facilities decommissioning. Sensors 2018, 18, 1015. [Google Scholar] [CrossRef] [PubMed]
- Baschenko, S.M. Remote optical detection of alpha particle sources. J. Radiol. Prot. 2004, 24, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Sand, J.; Ihantola, S.; Peräjärvi, K.; Toivonen, H.; Toivonen, J. Radioluminiscence yield of alpha particles in air. New J. Phys. 2014, 16, 053022. [Google Scholar] [CrossRef]
- Sand, J. Alpha Radiation Detection via Radioluminescence of Air. Ph.D. Thesis, Tampere University of Technology, Tampere, Finland, 2016. Available online: https://trepo.tuni.fi//handle/10024/114881 (accessed on 21 February 2024).
- Kerst, T.; Toivonen, J. Intense radioluminescence of NO/N2-mixture in solar blind spectral region. Opt. Express 2018, 26, 33764–33771. [Google Scholar] [CrossRef] [PubMed]
- Kerst, T.; Toivonen, J. Dynamic enhancement of nitric oxide radioluminescence with nitrogen purge. Sci. Rep. 2019, 9, 13884. [Google Scholar] [CrossRef] [PubMed]
- Krasniqi, F.; Kerst, T.; Leino, M.; Eisheh, J.T.; Toivonen, H.; Röttger, A.; Toivonen, J. Standoff UV-C imaging of alpha particle emitters. Nucl. Instrum. Methods Phys. Res. 2021, 987, 164821. [Google Scholar] [CrossRef]
- Remote and Real-Time Optical Detection of Alpha-Emitting Radionuclides in the Environment (RemoteALPHA) Project Official Web-Site. Available online: https://remotealpha.drmr.nipne.ro/ (accessed on 30 August 2023).
- Luchkov, M.; Olaru, C.; Lalau, I.; Zadehrafi, M.; Nikolényi, I.R.; Gémesi, Z.; Mihail-Razvan Ioan, M.R.; Krasniqi, F. Radioluminescence mapping of 241Am-doped environmental samples and nuclear materials. J. Radioanal. Nucl. Chem. 2024, 333, 253–262. [Google Scholar] [CrossRef]
- Parc Mediterrani de la Tecnologia, DRONELAB Section. Available online: https://pmt.es/ca/dronlab (accessed on 30 August 2023).
- Luchkov, M.; Dangendorf, V.; Giesen, U.; Langner, F.; Olaru, C.; Zadehrafi, M.; Klose, A.; Kalmankoski, K.; Sand, J.; Ihantola, S.; et al. Novel optical technologies for emergency preparedness and response: Mapping contaminations with alpha-emitting radionuclides. Nucl. Inst. Meth. 2023, 1047, 167895. [Google Scholar] [CrossRef]
- Thorlabs LC4252-UV—Ø1″ Plano-Concave Lens, f = -30.00 mm. Available online: https://www.thorlabs.de/thorproduct.cfm?partnumber=LC4252-UV (accessed on 21 February 2024).
- Thorlabs LA4052-UV—f = 35.0 mm, Ø1″ UV Fused Silica Plano-Convex Lens. Available online: https://www.thorlabs.de/thorproduct.cfm?partnumber=LA4052-UV (accessed on 21 February 2024).
- Hamamatsu Photonics Web-Site; Photon Counting Head PMT Modules Section. Available online: https://www.hamamatsu.com/us/en/product/optical-sensors/pmt/pmt-module/photon-counting-head/H11870-09.html (accessed on 30 August 2023).
- GBS Elektronik GmbH Web Site, Multi-Channel Analyzer Section. Available online: https://www.gbs-elektronik.de/en/nuclear-measurements/multi-channel-analyzer.php (accessed on 30 August 2023).
- DJI Matrice 600 Pro. Available online: https://www.dji.com/es/matrice600-pro (accessed on 21 February 2024).
- LightWare Lidar LLC Web-Site. Available online: https://lightwarelidar.com/products/sf11-c-100-m (accessed on 30 August 2023).
- Raspberry Pi Official Website. Available online: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/ (accessed on 30 August 2023).
- Sixfab Official Website. Available online: https://sixfab.com/product/raspberry-pi-4g-lte-modem-kit/ (accessed on 30 August 2023).
- Be, M.M.; Chiste, V.; Dulieu, C.; Mougeot, X.; Browne, E.; Chechev, V.; Kuzmenko, N.; Kondev, F.; Luca, A.; Galan, M.; et al. Table of Radionuclides (Vol. 5—A = 22 to 244); Bureau International des Poids et Mesures: Sevres, France, 2010; ISBN 13 978-92-822-2234-8. [Google Scholar]
- MQTT Official Website. Available online: https://mqtt.org/ (accessed on 31 August 2023).
- RabbitMQ Official Website. Available online: https://www.rabbitmq.com/ (accessed on 31 August 2023).
- European Accreditation. EA-4/02 M: 2013 Evaluation of the Uncertainty of Measurement in Calibration. 2013, p. 75. Available online: https://www.twirpx.com/file/1996254/ (accessed on 21 February 2024).
- ISO 11929-4:2022; Determination of the Characteristic Limits (Decision Threshold, Detection Limit and Limits of the Coverage Interval) for Measurements of Ionizing Radiation. ISO: Geneva, Switzerland, 2022. Available online: https://www.iso.org/standard/84497.html/ (accessed on 21 February 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Weight (g) |
|---|---|
| Detector structure and landing gear | 2591 |
| PMT detector | 408 |
| GBS MCA527OEM + onboard computer + air–ground communications and wires | 468 |
| TOTAL | 3467 |
| F (cm) | d (m) | n (s−1) | FOV (cm) | AFOV (°) |
|---|---|---|---|---|
| 3 | 2 | 2240 | 9.6 | 2.75 |
| 3 | 3 | 2510 | 7.5 | 1.44 |
| 3 * | 4 | 1550 | 8.6 | 1.24 |
| 3 * | 5 | 811 | 10.7 | 1.22 |
| 7 * | 2 | 6070 | 4.1 | 1.17 |
| 4 * | 3 | 2770 | 6.4 | 1.23 |
| F (cm) | d (m) | n (s−1) | FOV (cm) | AFOV (°) | ε (s−1 MBq−1) | εs (s−1 MBq−1 cm2) |
|---|---|---|---|---|---|---|
| 3 | 2 | 2240 | 9.6 | 2.75 | 0.31 | 22 |
| 3 | 3 | 2510 | 7.5 | 1.44 | 0.34 | 15 |
| 3 | 4 | 1550 | 8.6 | 1.24 | 0.21 | 12 |
| 3 | 5 | 811 | 10.7 | 1.22 | 0.11 | 10 |
| F (cm) | d (m) | n (s−1) | FOV (cm) | AFOV (°) | ε (s−1 MBq−1) | εs (s−1 MBq−1 cm2) |
|---|---|---|---|---|---|---|
| 7 | 2 | 6070 | 4.1 | 1.17 | 0.83 | 11 |
| 4 | 3 | 2770 | 6.4 | 1.23 | 0.38 | 12 |
| 3 | 4 | 1550 | 8.6 | 1.24 | 0.21 | 12 |
| 3 | 5 | 811 | 10.7 | 1.22 | 0.11 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Royo, P.; Vargas, A.; Guillot, T.; Saiz, D.; Pichel, J.; Rábago, D.; Duch, M.A.; Grossi, C.; Luchkov, M.; Dangendorf, V.; et al. The Mapping of Alpha-Emitting Radionuclides in the Environment Using an Unmanned Aircraft System. Remote Sens. 2024, 16, 848. https://doi.org/10.3390/rs16050848
Royo P, Vargas A, Guillot T, Saiz D, Pichel J, Rábago D, Duch MA, Grossi C, Luchkov M, Dangendorf V, et al. The Mapping of Alpha-Emitting Radionuclides in the Environment Using an Unmanned Aircraft System. Remote Sensing. 2024; 16(5):848. https://doi.org/10.3390/rs16050848
Chicago/Turabian StyleRoyo, Pablo, Arturo Vargas, Tania Guillot, David Saiz, Jonathan Pichel, Daniel Rábago, María Amor Duch, Claudia Grossi, Maksym Luchkov, Volker Dangendorf, and et al. 2024. "The Mapping of Alpha-Emitting Radionuclides in the Environment Using an Unmanned Aircraft System" Remote Sensing 16, no. 5: 848. https://doi.org/10.3390/rs16050848
APA StyleRoyo, P., Vargas, A., Guillot, T., Saiz, D., Pichel, J., Rábago, D., Duch, M. A., Grossi, C., Luchkov, M., Dangendorf, V., & Krasniqi, F. (2024). The Mapping of Alpha-Emitting Radionuclides in the Environment Using an Unmanned Aircraft System. Remote Sensing, 16(5), 848. https://doi.org/10.3390/rs16050848