
Python Software Tool for Diagnostics of the Global Navigation Satellite System Station (PS-NETM)–Reviewing the New Global Navigation Satellite System Time Series Analysis Tool



Abstract
1. Introduction
2. Materials and Methods
2.1. Processing Time Series from Various Software
2.2. Fundamental Differences between Classical and Non-Classical Methods of Mathematical Modeling
2.3. Algorithm for Estimating the Accuracy of the Results of GNSS Measurements Identified by the Non-Classical Error Theory of Measurements
- Finding the arithmetic mean of sample n > 500;
- Calculating errors and central sampling points;
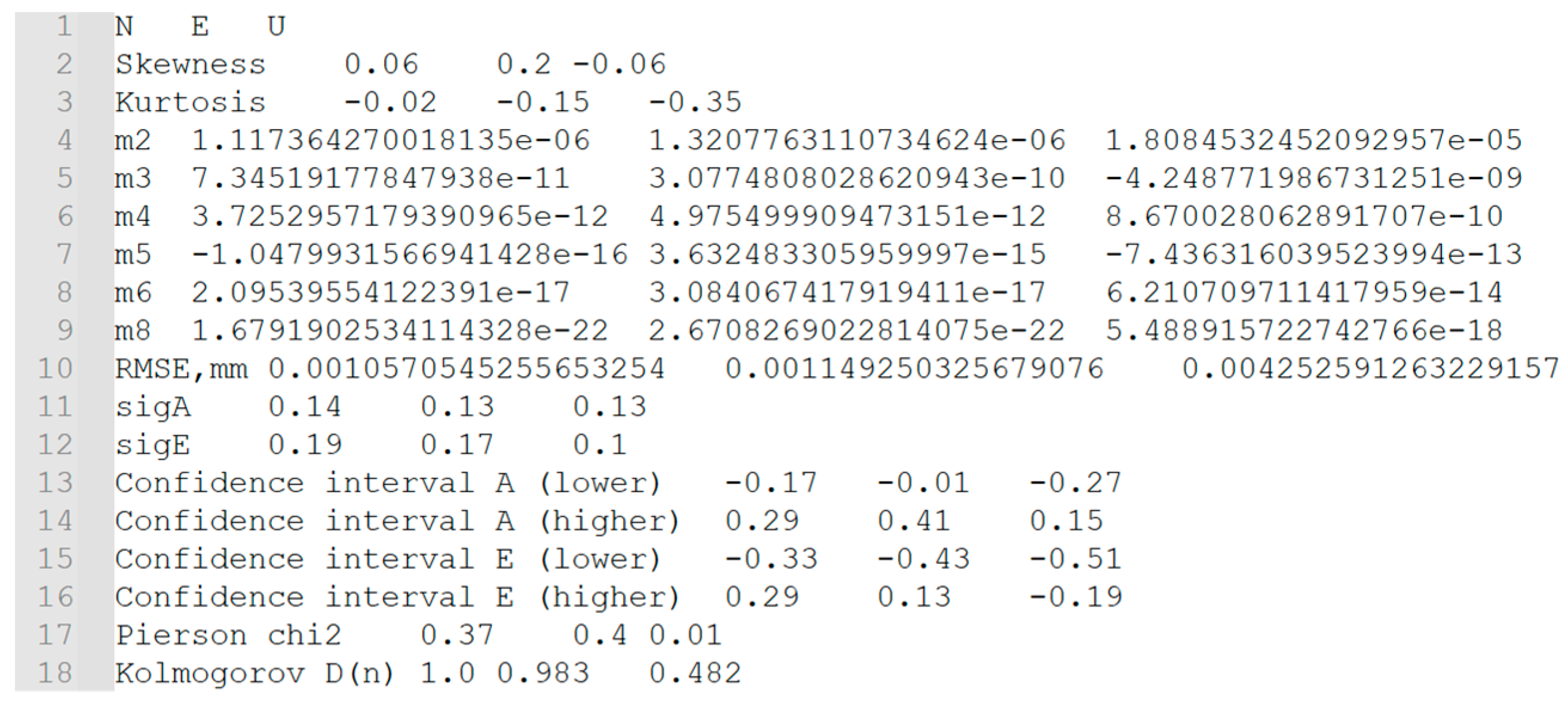
- Calculating the skewness ( and kurtosis ( of the sample using unbiased central moments [20]:
- 4.
- Finding the standard of skewness ( and kurtosis (;
- 5.
- Building confidence intervals for skewness and kurtosis. To diagnose the modeling, it is enough to find 90% confidence intervals, i.e., using the quantile , and the following formulas: . Provided that the confidence intervals for and cover zero, processing the GNSS observations can be limited to classical estimation methods;
- 6.
- Performing diagnostics of mathematical modeling through «observation–calculation» differences based on the constructed confidence intervals for the skewness and kurtosis. NETM methods should be used when the confidence interval for (:) covers zero and when the entire interval for is in the positive region (:) or the confidence interval is in the negative region (: ) without covering zero. All other cases indicate various pathologies in the operation of GNSS equipment, the processing, or unacceptable observation conditions (the state of the antenna installation center, the presence of a constant source of multipath signals, specific local geophysical parameters, etc.). All the diagnostic parameters based on the constructed confidence intervals for skewness and kurtosis can be found in Table 1;
- 7.
- 8.
- Receiving a general conclusion about the accuracy assessment of GNSS observations using the NETM diagnostics.
3. Results
3.1. Program Language and Installation
- Numpy is a library that adds support for large multidimensional arrays and matrices, along with a large library of high-level mathematical functions for operations on these arrays;
- Scipy is a library of high-quality scientific tools for the Python programming language (in particular, it is used to calculate the value of the Laplace function at the ends of histogram intervals and to calculate Pearson’s criterion (χ2));
- Matplotlib is a library whose main purpose is to visualize data with 2D graphics; it is used to create and draw error distribution histograms and time series graphs;
- Pywt is the implementation of wavelet analysis in Python; it is used to partially remove white and colored noise from the time series [23];
- PyEMD is the implementation of the Empirical Mode Decomposition filter in Python;
- PyQT is a Python shell for the Qt library. It was used to create a UI.
3.2. Structure of the PS-NETM Software
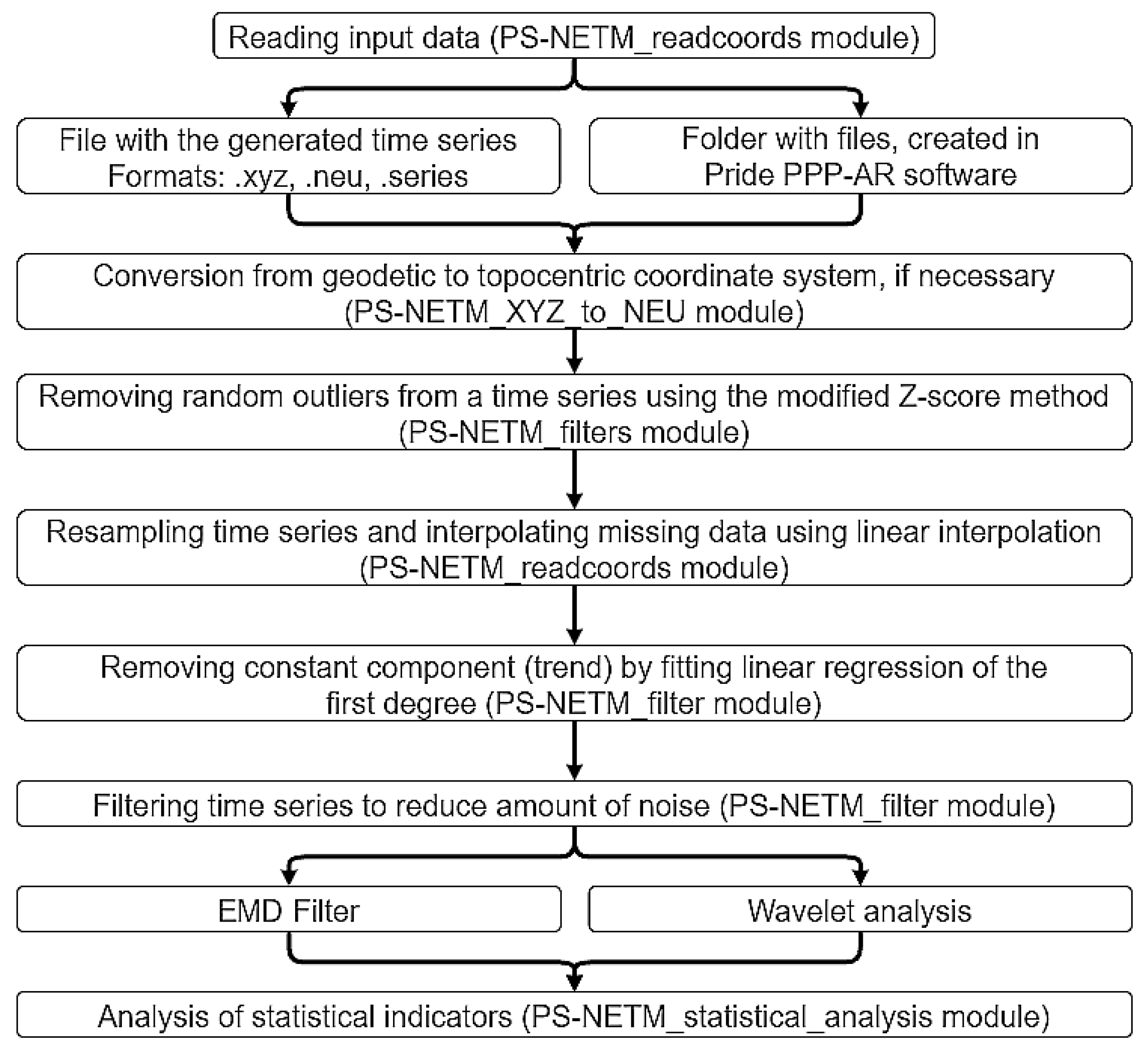
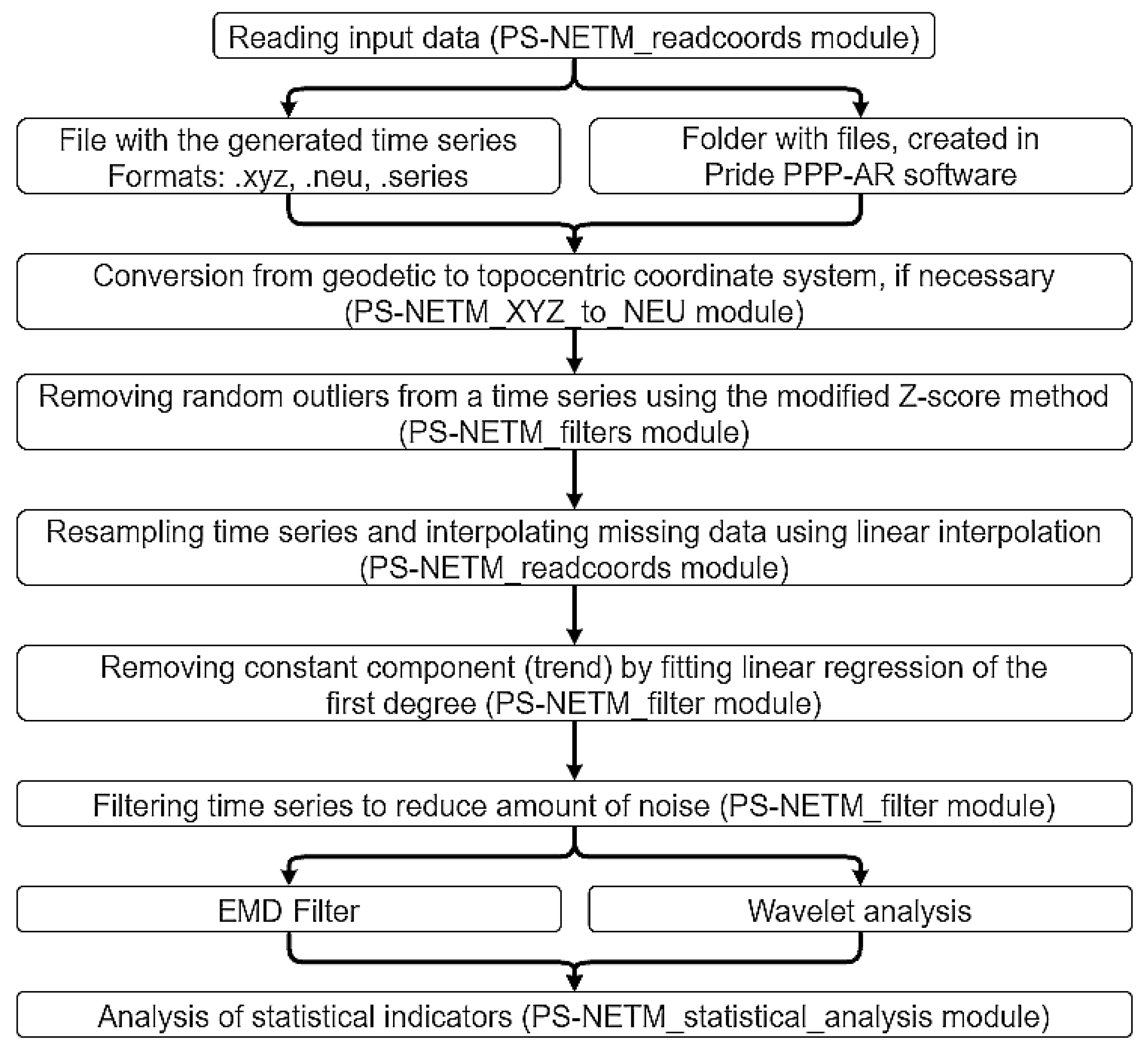
- Reading data from a specified file (if the time series has already been generated) or a folder with pos-files (PS-NETM_readcoords module);
- Converting from a geocentric to topocentric coordinate system if necessary (PS-NETM_XYZ_to_NEU module);
- Removing random outliers from the time series using the modified Z-score method (PS-NETM_filters module);
- Resampling the time series and interpolating missing data using the linear interpolation method. (PS-NETM_readcoords module);
- Removing the constant component (trend) by fitting linear regression of the first degree.
- The number of measurements in time series should be at least 500 actual values, which, in the case of GNSS coordinate series, means daily station coordinates for a year and a half observation period;
- The number of missing observations should not exceed 5% of the total amount of data;
- PS-NETM is not recommended for analyzing stations in seismically active regions.
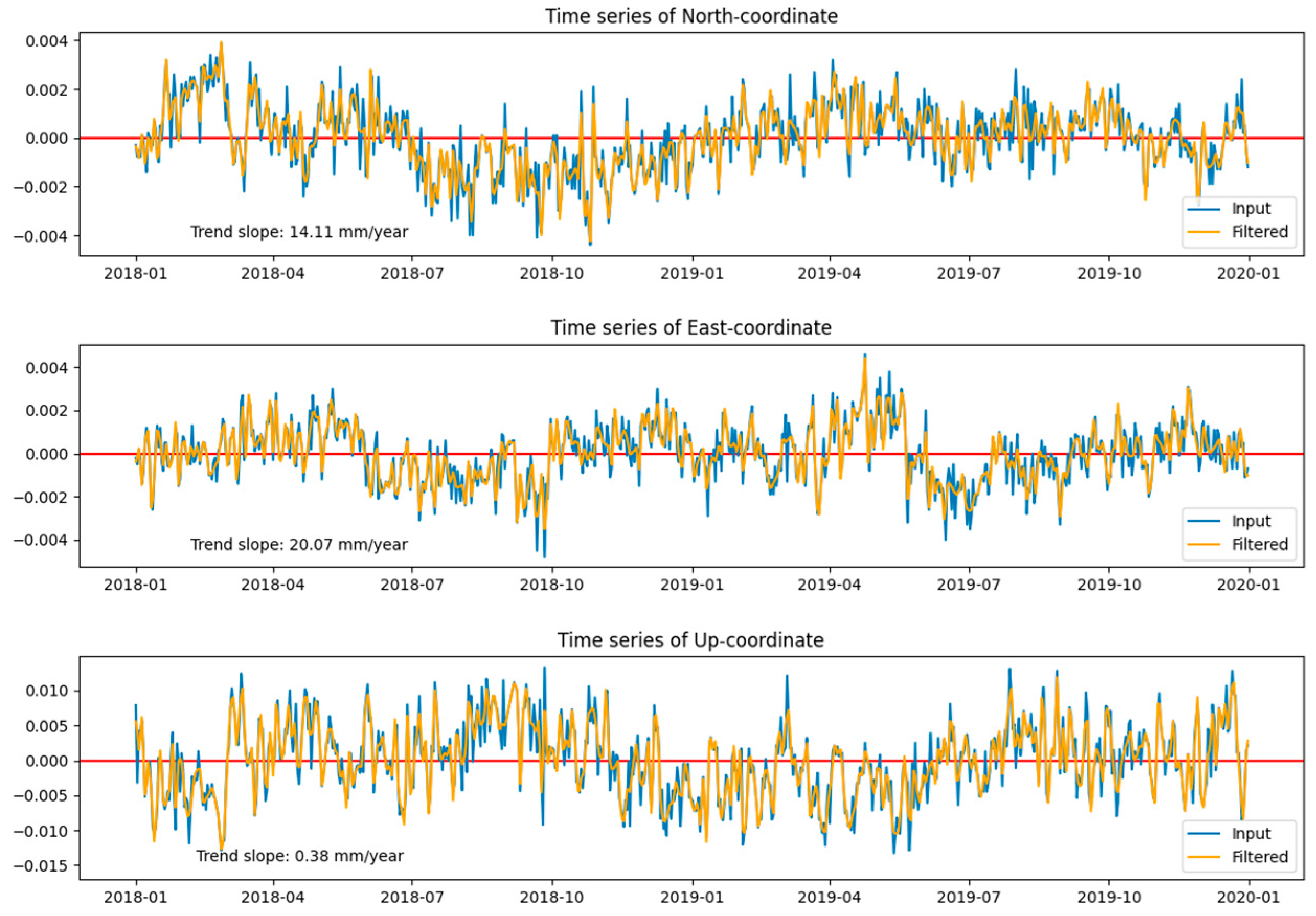
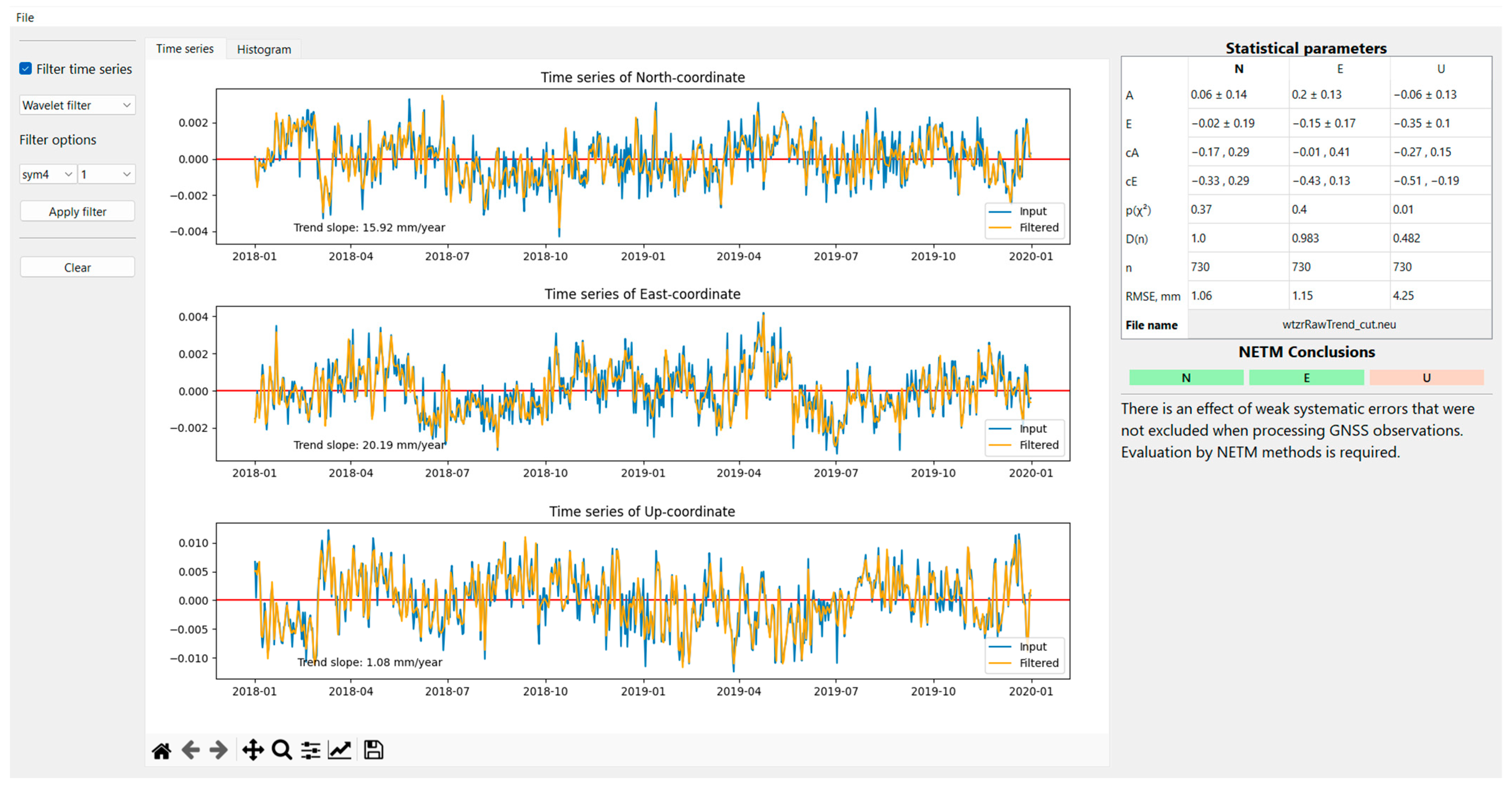
3.3. GNSS Position Time Series Conversion and Visualization in PS-NETM
3.4. Test and Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Bock, Y.; Wdowinski, S. GNSS Geodesy in Geophysics, Natural Hazards, Climate, and the Environment. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; IEEE: Piscataway, NJ, USA, 2020; pp. 741–820. [Google Scholar] [CrossRef]
- He, X.; Montillet, J.-P.; Fernandes, R.; Bos, M.; Yu, K.; Hua, X.; Jiang, W. Review of current GPS methodologies for producing accurate time series and their error sources. J. Geodyn. 2017, 106, 12–29. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111, B03405. [Google Scholar] [CrossRef]
- Ming, F.; Yang, Y.; Zeng, A.; Zhao, B. Spatiotemporal filtering for regional GPS network in China using independent component analysis. J. Geod. 2017, 91, 419–440. [Google Scholar] [CrossRef]
- Zhou, M.; Guo, J.; Shen, Y.; Kong, Q.; Yuan, J. Extraction of common mode errors of GNSS coordinate time series based on multi-channel singular spectrum analysis. Chin. J. Geophys. 2018, 61, 4383–4395. [Google Scholar] [CrossRef]
- Tian, Y.; Shen, Z.-K. Extracting the regional common-mode component of GPS station position time series from dense continuous network. J. Geophys. Res. Solid Earth 2016, 121, 1080–1096. [Google Scholar] [CrossRef]
- Bos, M.S.; Montillet, J.P.; Williams, S.D.P.; Fernandes, R.M.S. Introduction to Geodetic Time Series Analysis; Springer: Cham, Switzerland, 2019; pp. 29–52. [Google Scholar] [CrossRef]
- King, M.A.; Watson, C.S. Long GPS coordinate time series: Multipath and geometry effects. J. Geophys. Res. Solid Earth 2010, 115, 2500–2511. [Google Scholar] [CrossRef]
- Wu, D.; Yan, H.; Shen, Y. TSAnalyzer, a GNSS time series analysis software. GPS Solut. 2017, 21, 1389–1394. [Google Scholar] [CrossRef]
- Santamaría-Gómez, A. SARI: Interactive GNSS position time series analysis software. GPS Solut. 2019, 23, 52. [Google Scholar] [CrossRef]
- He, X.; Yu, K.; Montillet, J.-P.; Xiong, C.; Lu, T.; Zhou, S.; Ma, X.; Cui, H.; Ming, F. GNSS-TS-NRS: An Open-Source MATLAB-Based GNSS Time Series Noise Reduction Software. Remote Sens. 2020, 12, 3532. [Google Scholar] [CrossRef]
- Łyszkowicz, A.; Pelc-Mieczkowska, R.; Bernatowicz, A.; Savchuk, S. First results of time series analysis of the permanent GNSS observations at polish EPN stations using GipsyX software. Artif. Satell. 2021, 56, 101–118. [Google Scholar] [CrossRef]
- Zus, F.; Dick, G.; Dousa, J.; Wickert, J. Systematic errors of mapping functions which are based on the VMF1 concept. GPS Solut. 2015, 19, 277–286. [Google Scholar] [CrossRef]
- Langbein, J.; Svarc, J.L. Evaluation of temporally correlated noise in global navigation satellite system time series: Geodetic monument performance. J. Geophys. Res. Solid Earth 2019, 124, 925–942. [Google Scholar] [CrossRef]
- Geng, J.; Chen, X.; Pan, Y.; Mao, S.; Li, C.; Zhou, J.; Zhang, K. PRIDE PPP-AR: An open-source software for GPS PPP ambiguity resolution. GPS Solut. 2019, 23, 91. [Google Scholar] [CrossRef]
- Bock, Y.; Fang, P.; Knox, A.; Sullivan, A.; Jiang, S.; Guns, K.; Golriz, D.; Moore, A.; Argus, D.; Liu, Z.; et al. Extended Solid Earth Science ESDR System: Algorithm Theoretical Basis Document. 2023. Available online: http://garner.ucsd.edu/pub/measuresESESES_products/ATBD/ESESES-ATBD.pdf (accessed on 12 June 2023).
- Barba, P.; Rosado, B.; Ramírez-Zelaya, J.; Berrocoso, M. Comparative Analysis of Statistical and Analytical Techniques for the Study of GNSS Geodetic Time Series. Eng. Proc. 2021, 5, 21. [Google Scholar] [CrossRef]
- Time Series in SOPAC Archive. Available online: http://garner.ucsd.edu/pub/measuresESESES_products/Timeseries/ (accessed on 12 June 2023).
- Jeffreys, H. The law of error and the combination of observations. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1938, 237, 231–271. [Google Scholar] [CrossRef]
- Dvulit, P.; Dzhun, J. Application of methods of the non-classical error theory in absolute measurements of Galilean acceleration. Geodynamics 2017, 1, 7–15. [Google Scholar] [CrossRef]
- Chimitova, E.; Lemeshko, B.; Lemeshko, S.; Postovalov, S.; Rogozhnikov, A. Software System for Simulation and Research of Probabilistic Regularities and Statistical Data Analysis in Reliability and Quality Control. In Mathematical and Statistical Models and Methods in Reliability: Applications to Medicine, Finance, and Quality Control; Birkhäuser: Boston, MA, USA, 2014; Volume 114, pp. 417–432. [Google Scholar] [CrossRef]
- Tumanov, A.; Sabanaev, A.; Solovyov, A.; Tumanov, V. Statistical testing of hypotheses about the form of the factor law of influence by the Kolmogorov criterion. J. Phys. Conf. Ser. 2020, 1614, 012082. [Google Scholar] [CrossRef]
- Lee, G.; Gommers, R.; Wasilewski, F.; Wohlfahrt, K.; O’Leary, A. PyWavelets: A Python package for wavelet analysis. J. Open Source Softw. 2019, 4, 1237. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Ji, K.; Shen, Y. A Wavelet-Based Outlier Detection and Noise Component Analysis for GNSS Position Time Series. In Beyond 100: The Next Century in Geodesy. International Association of Geodesy Symposia; Freymueller, J.T., Sánchez, L., Eds.; Springer: Cham, Switzerland, 2020; Volume 152. [Google Scholar] [CrossRef]
- Time Series in CDDIS Archive. Available online: https://cddis.nasa.gov/archive/GPS_Explorer/archive/time_series/ (accessed on 12 June 2023).
- Reference Stations Classification in EPN. Available online: http://www.epncb.oma.be/_productsservices/ReferenceFrame/Station_Classification.php (accessed on 12 June 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result | Diagnosis by Result |
|---|---|
| Confirmation of hypotheses: ) | There is no need to apply NETM. |
| Confirmation of hypotheses: ) ) ) | There is an effect of weak systematic errors that were not excluded when processing GNSS observations. An evaluation by NETM methods is required. |
| Confirmation of hypotheses: ) ) ) ) ) ) | Significant data pathology. Evaluation is not possible. |
| A | Skewness of Dataset |
|---|---|
| E | Kurtosis of dataset |
| cA | Confidence interval for skewness |
| cE | Confidence interval for kurtosis |
| p(χ2) | Pierson’s chi-square criteria |
| D(n) | Kolmogorov–Smirnov criteria |
| n | Number of observations |
| RMSE, mm | Root mean square error |
| File name | Name of file (folder) |
| Station Name | Location | Status in EPN | |
|---|---|---|---|
| Included Since | Class | ||
| WTZR | Wetzell/Germany | 31-12-1995 | C0 |
| HELG | Helgoland Island/Germany | 28-11-1999 | C1 |
| PTBB | Brauschweig/Germany | 23-04-2000 | C5 |
| WROC | Wroclaw/Poland | 24-11-1996 | C6 |
| Station | RMSE, mm | Asymmetry and Its Deviations | Confidence Interval for A | Kurtosis and Its Deviation | Confidence Interval for E | |
|---|---|---|---|---|---|---|
| WTZR | N | 1.06 | 0.06 ± 0.14 | −0.17, 0.29 | −0.02 ± 0.19 | −0.33, 0.29 |
| E | 1.15 | 0.2 ± 0.13 | −0.01, 0.41 | −0.15 ± 0.17 | −0.43, 0.13 | |
| U | 4.25 | −0.05 ± 0.13 | −0.26, 0.16 | −0.35 ± 0.1 | −0.51, −0.19 | |
| HELG | N | 1.18 | −0.46 ± 0.15 | −0.71, −0.21 | 0.61 ± 0.41 | −0.06, 1.28 |
| E | 1.3 | 0.19 ± 0.15 | −0.06, 0.44 | 0.09 ± 0.26 | −0.34, 0.52 | |
| U | 4.23 | 0.11 ± 0.13 | −0.1, 0.32 | −0.36 ± 0.11 | −0.54, −0.18 | |
| PTBB | N | 1.46 | −0.03 ± 0.13 | −0.24, 0.18 | −0.49 ± 0.1 | −0.65, −0.33 |
| E | 1.2 | 0.07 ± 0.13 | −0.14, 0.28 | −0.34 ± 0.13 | −0.55, −0.13 | |
| U | 4.38 | −0.11 ± 0.13 | −0.32, 0.1 | −0.36 ± 0.1 | −0.52, −0.2 | |
| WROC | N | 1.24 | −0.17 ± 0.14 | −0.4, 0.06 | 0.16 ± 0.18 | −0.14, 0.46 |
| E | 1.19 | −0.04 ± 0.14 | −0.27, 0.19 | 0.01 ± 0.2 | −0.32, 0.34 | |
| U | 4.89 | −0.02 ± 0.12 | −0.22, 0.18 | −0.56 ± 0.08 | −0.69, −0.43 | |
| Station | EPN Class | Coordinate Components | Overall Conclusion |
|---|---|---|---|
| WTZR | C0 | N | There is an effect of weak systematic errors that were not excluded when processing GNSS observations. Evaluation by NETM methods is required. |
| E | |||
| U | |||
| HELG | C1 | N | Significant data pathology. Evaluation is not possible. |
| E | |||
| U | |||
| PTBB | C5 | N | There is an effect of weak systematic errors that were not excluded when processing GNSS observations. Evaluation by NETM methods is required. |
| E | |||
| U | |||
| WROC | C6 | N | There is an effect of weak systematic errors that were not excluded when processing GNSS observations. Evaluation by NETM methods is required. |
| E | |||
| U |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savchuk, S.; Dvulit, P.; Kerker, V.; Michalski, D.; Michalska, A. Python Software Tool for Diagnostics of the Global Navigation Satellite System Station (PS-NETM)–Reviewing the New Global Navigation Satellite System Time Series Analysis Tool. Remote Sens. 2024, 16, 757. https://doi.org/10.3390/rs16050757
Savchuk S, Dvulit P, Kerker V, Michalski D, Michalska A. Python Software Tool for Diagnostics of the Global Navigation Satellite System Station (PS-NETM)–Reviewing the New Global Navigation Satellite System Time Series Analysis Tool. Remote Sensing. 2024; 16(5):757. https://doi.org/10.3390/rs16050757
Chicago/Turabian StyleSavchuk, Stepan, Petro Dvulit, Vladyslav Kerker, Daniel Michalski, and Anna Michalska. 2024. "Python Software Tool for Diagnostics of the Global Navigation Satellite System Station (PS-NETM)–Reviewing the New Global Navigation Satellite System Time Series Analysis Tool" Remote Sensing 16, no. 5: 757. https://doi.org/10.3390/rs16050757
APA StyleSavchuk, S., Dvulit, P., Kerker, V., Michalski, D., & Michalska, A. (2024). Python Software Tool for Diagnostics of the Global Navigation Satellite System Station (PS-NETM)–Reviewing the New Global Navigation Satellite System Time Series Analysis Tool. Remote Sensing, 16(5), 757. https://doi.org/10.3390/rs16050757