
Preliminary Performance Assessment of the Wave Parameter Retrieval Algorithm from the Average Reflected Pulse
 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
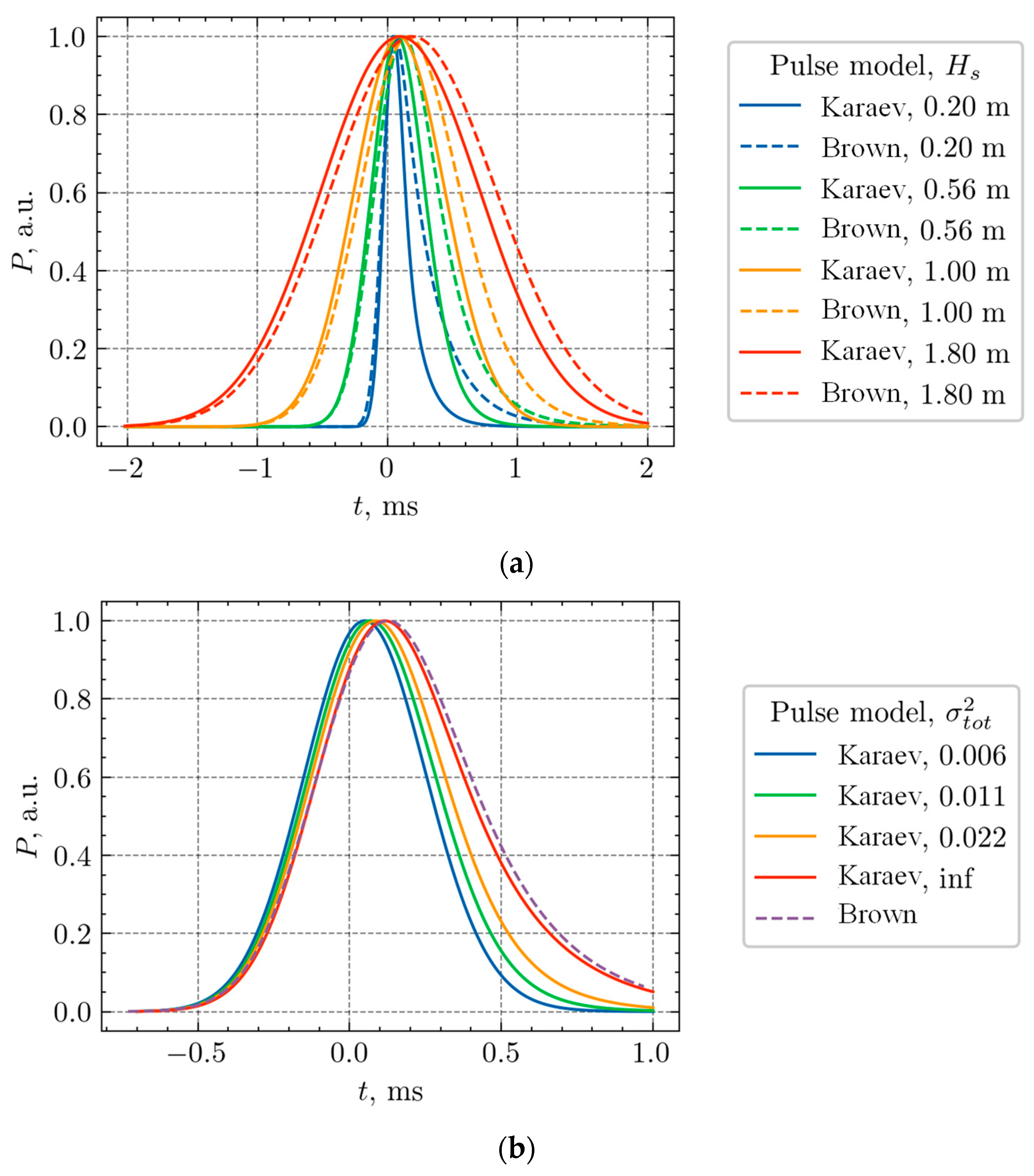
2.1. Acoustic Pulse Model Considering Slope Variance
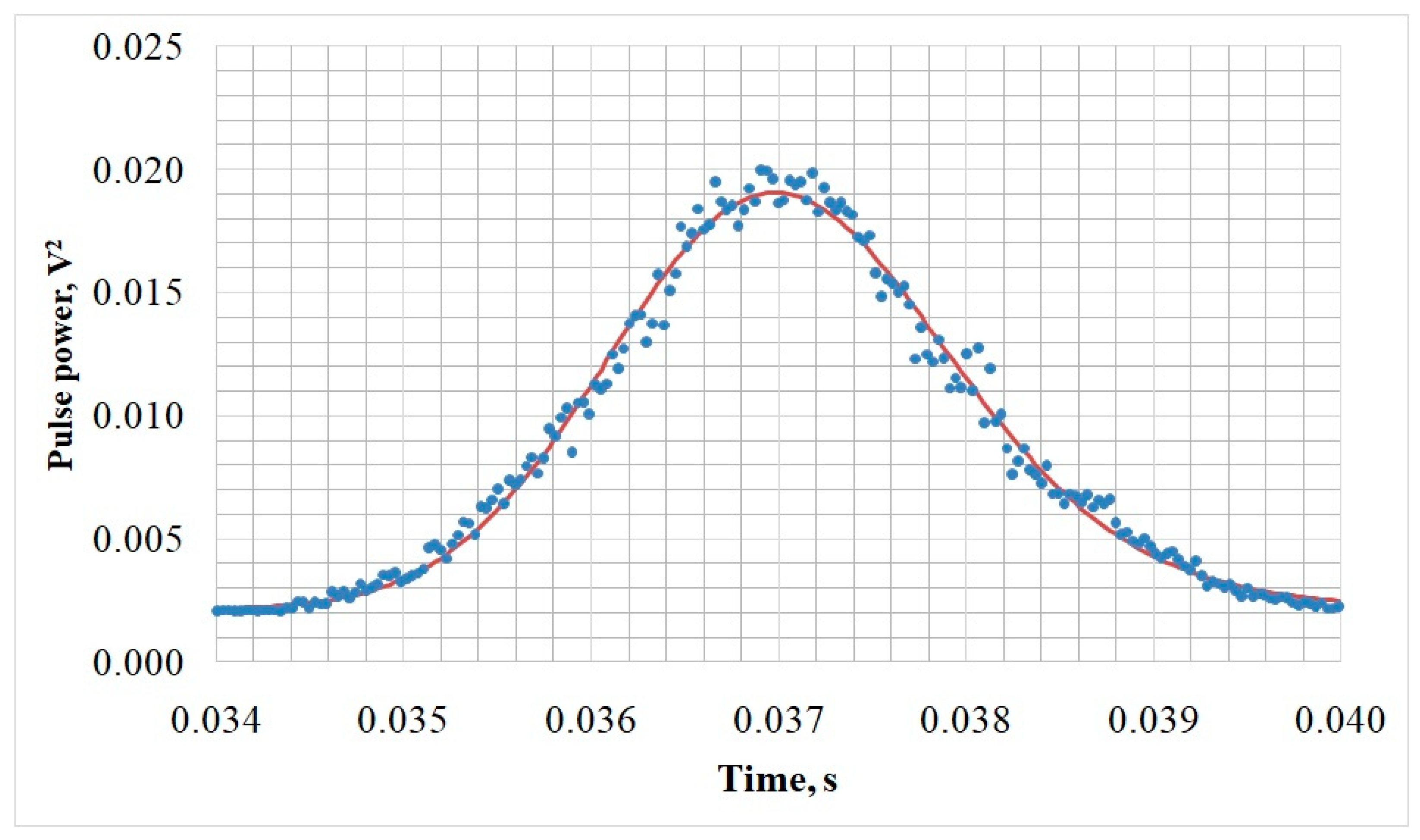
2.2. Numerical Simulation of Reflected Acoustic Pulse and Retracking
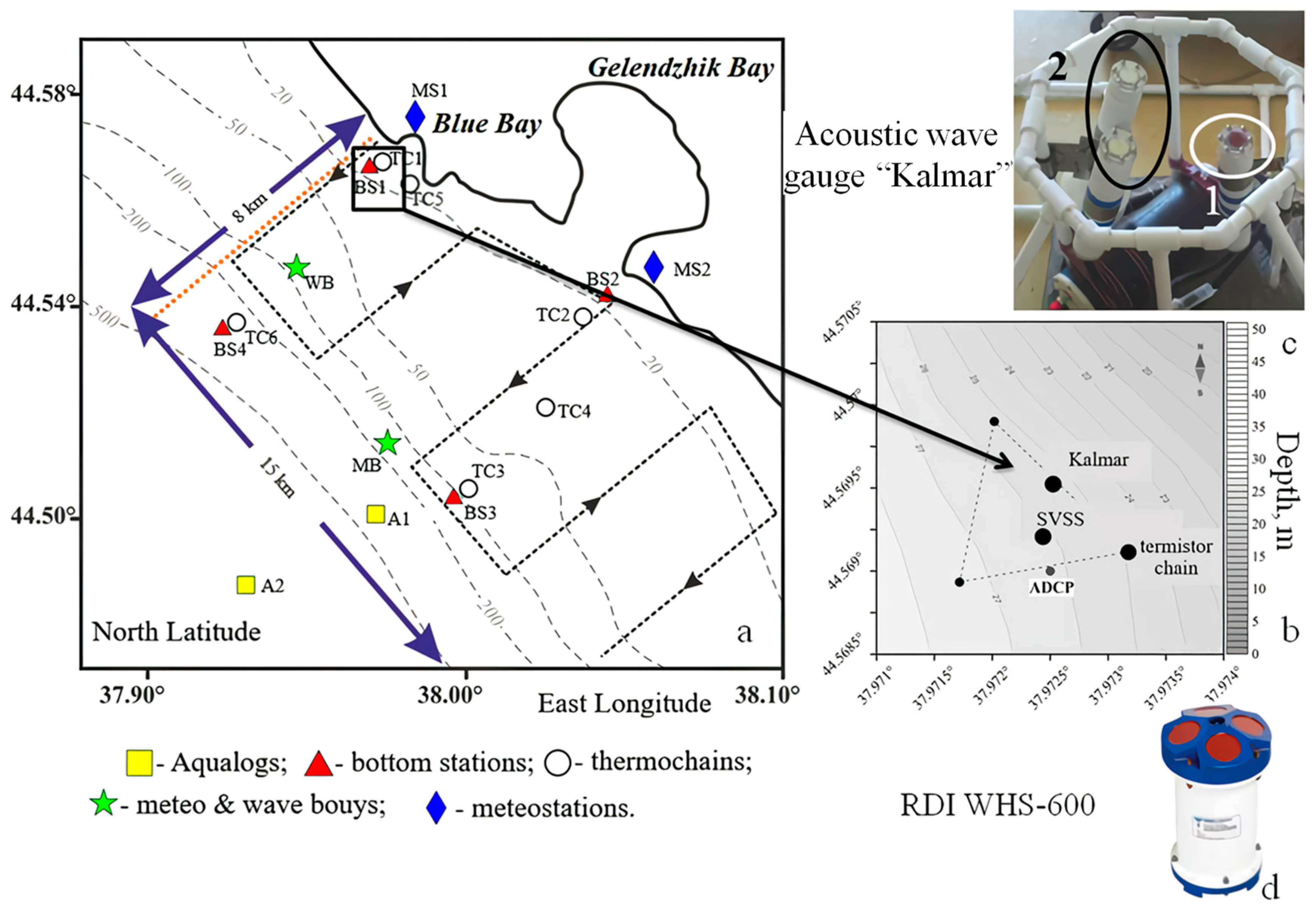
2.3. Test Site and Instruments
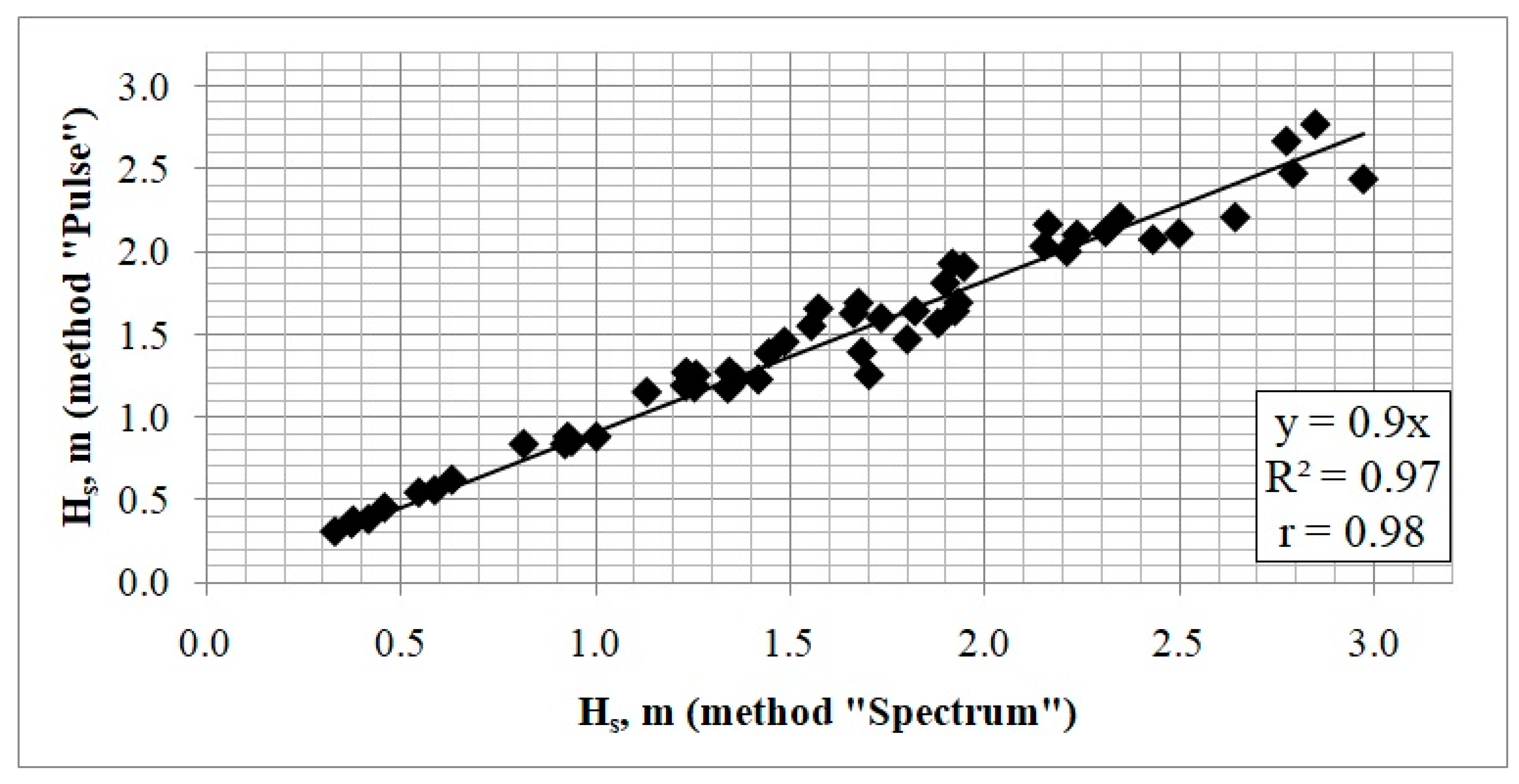
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barale, V.; Gower, J.F.; Alberotanza, L. Oceanography from Space: Revisited; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Halpern, D. Satellites, Oceanography and Society; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
- NDBC. Handbook of Automated Data Quality Control Checks and Procedures; Technical Document 09-02; National Data Buoy Center: Hancock County, MI, USA, 2009.
- Dulov, V.A.; Korinenko, A.E.; Kudryavtsev, V.N.; Malinovsky, V.V. Modulation of Wind-Wave Breaking by Long Surface Waves. Remote Sens. 2021, 13, 2825. [Google Scholar] [CrossRef]
- Bondur, V.G.; Dulov, V.A.; Murynin, A.B.; Yurovsky, Y.Y. A study of sea-wave spectra in a wide wavelength range from satellite and in-situ data. Izv. Atmos. Ocean. Phys. 2016, 52, 888–903. [Google Scholar] [CrossRef]
- Hwang, P.A. Microstructure of Ocean Surface Roughness: A Study of Spatial Measurement and Laboratory Investigation of Modulation Analysis. J. Atmos. Ocean. Technol. 1999, 16, 1619–1629. [Google Scholar] [CrossRef]
- Sterlyadkin, V.V.; Kulikovsky, K.V.; Kuzmin, A.V.; Sharkov, E.A.; Likhacheva, M.V. Scanning Laser Wave Recorder with Registration of “Instantaneous” Sea Surface Profiles. J. Atmos. Ocean. Technol. 2021, 38, 1415–1424. [Google Scholar] [CrossRef]
- Dally, W.R.; Osiecki, D.A. Comparison of Deep-water ADCP and NDBC Buoy Measurements to Hindcast Parameters. In Proceedings of the 8th International Workshop on Wave Hindcasting and Forecasting, Honolulu, HI, USA, 14–19 November 2004. [Google Scholar]
- Strong, B.; Brumley, B.; Terray, E.; Stone, G. The performance of ADCP-derived directional wave spectra and comparison with other independent measurements. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Providence, RI, USA, 11–14 September 2000; pp. 1195–1203. [Google Scholar]
- Birch, R.; Fissel, D.B.; Borg, K.; Lee, V.; English, D. The capabilities of Doppler current profilers for directional wave measurements in coastal and nearshore waters. In Proceedings of the Oceans ‘04 MTS/IEEE Techno-Ocean ‘04 (IEEE Cat. No.04CH37600), Kobe, Japan, 9–12 November 2004; Volume 1413, pp. 1418–1427. [Google Scholar]
- Churchill, J.H.; Plueddemann, A.J.; Faluotico, S.M. Extracting Wind Sea and Swell from Directional Wave Spectra Derived from a Bottom-Mounted ADCP; Woods Hole Oceanographic Institution: Falmouth, MA, USA, 2003; p. 41. [Google Scholar]
- Ryabkova, M.; Titchenko, Y.; Karaev, V.; Meshkov, E.; Belyaev, R.; Panfilova, M.; Baranov, V.; Ocherednik, V. Experimental Measurements of the Statistical Charachteristics of the Sea Waves Using Underwater Acoustic Wavegauge and Comparison with ADCP Measurements. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7545–7548. [Google Scholar]
- Troitskaya, Y.I.; Rybushkina, G.V. Quasi-linear model of interaction of surface waves with strong and hurricane winds. Izv. Atmos. Ocean. Phys. 2008, 44, 621–645. [Google Scholar] [CrossRef]
- Brown, G. The average impulse response of a rough surface and its applications. IEEE Trans. Antennas Propag. 1977, 25, 67–74. [Google Scholar] [CrossRef]
- Bass, F.G.; Fuks, I.M. Scattering of Waves by Statistically Rough Surfaces; Pergamon Press: Oxford, UK, 1979. [Google Scholar]
- Elfouhaily, T.; Guérin, C. A critical survey of approximate scattering wave theories from random rough surfaces. Waves Random Media 2004, 14, R1–R40. [Google Scholar] [CrossRef]
- Barrick, D. Rough Surface Scattering Based on the Specular Point Theory. IEEE Trans. Antennas Propag. 1968, 16, 449–454. [Google Scholar] [CrossRef]
- Voronovic, A.G.; Zavorotny, V.U. Theoretical model for scattering of radar signals in Ku- and C-bands from a rough sea surface with breaking waves. Waves Random Media 2001, 11, 247–269. [Google Scholar] [CrossRef]
- Valenzuela, G. Theories for interaction of electromagnetic and oceanic waves: A review. Bound. Layer Meteorol. 1978, 13, 61–86. [Google Scholar] [CrossRef]
- Karaev, V.Y.; Meshkov, M.E.; Titchenko, Y.A. Underwater Acoustic Altimeter. Radiophys. Quantum Electron. 2014, 57, 488–497. [Google Scholar] [CrossRef]
- Baskakov, A.I.; Komarov, A.A.; Mikhailov, M.S. Methodical Errors of a High-Precision Airborne Radio Altimeter Operating at Low Altitudes Above the Sea Surface. Radiophys. Quantum Electron. 2017, 60, 467–474. [Google Scholar] [CrossRef]
- Baskakov, A.I.; Komarov, A.A.; Ruban, A.V.; Ka, M.-H. Limiting Accuracy of Height Measurement for a Precision Radar Altimeter in a Low Altitude Flying Vehicle above the Sea Surface. Remote Sens. 2021, 13, 2660. [Google Scholar] [CrossRef]
- Hauser, D.; Soussi, E.; Thouvenot, E.; Rey, L. SWIMSAT: A Real-Aperture Radar to Measure Directional Spectra of Ocean Waves from Space—Main Characteristics and Performance Simulation. J. Atmos. Ocean. Technol. 2001, 18, 421–437. [Google Scholar] [CrossRef]
- Lin, W.; Dong, X.; Portabella, M.; Lang, S.; He, Y.; Yun, R.; Wang, Z.; Xu, X.; Zhu, D.; Liu, J. A Perspective on the Performance of the CFOSAT Rotating Fan-Beam Scatterometer. IEEE Trans. Geosci. Remote Sens. 2019, 57, 627–639. [Google Scholar] [CrossRef]
- Nouguier, F.; Mouche, A.; Rascle, N.; Chapron, B.; Vandemark, D. Analysis of Dual-Frequency Ocean Backscatter Measurements at Ku- and Ka-Bands Using Near-Nadir Incidence GPM Radar Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1310–1314. [Google Scholar] [CrossRef]
- Ryabkova, M.; Karaev, V.; Guo, J.; Titchenko, Y. A Review of Wave Spectrum Models as Applied to the Problem of Radar Probing of the Sea Surface. J. Geophys. Res. Ocean. 2019, 124, 7104–7134. [Google Scholar] [CrossRef]
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.-L.; Callahan, P.S. Chapter 1 Satellite Altimetry. In International Geophysics; Fu, L.-L., Cazenave, A., Eds.; Academic Press: Cambridge, MA, USA, 2001; Volume 69, pp. 1–133. [Google Scholar]
- Ostrovskii, A.G.; Zatsepin, A.G.; Soloviev, V.A.; Tsibulsky, A.L.; Shvoev, D.A. Autonomous system for vertical profiling of the marine environment at a moored station. Oceanology 2013, 53, 233–242. [Google Scholar] [CrossRef]
- Ocherednik, V.V.; Baranov, V.I.; Zatsepin, A.G.; Kyklev, S.B. Thermochains of the Southern Branch, Shirshov Institute of Oceanology, Russian Academy of Sciences: Design, Methods, and Results of Metrological Investigations of Sensors. Oceanology 2018, 58, 661–671. [Google Scholar] [CrossRef]
- Titchenko, Y.; Karaev, V.; Ryabkova, M.; Kuznetsova, A.; Meshkov, E. Peculiarities of the Acoustic Pulse Formation Reflected by the Water Surface: A Numerical Experiments and the Results of Long-term Measurements Using the “Kalmar” Sonar. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar]
- Waves User’s Guide; P/N 957-6148-00; RD Instruments: San Diego, CA, USA, 2011; p. 74.
- Zapevalov, A.; Pokazeev, K.; Chaplina, T. The Distribution of the Variance of the Sea Surface Slopes on the Spatial Scales Creating Their Waves. In Simulation of the Sea Surface for Remote Sensing; Springer International Publishing: Cham, Switzerland, 2021; pp. 157–172. [Google Scholar]
- Danilytchev, M.V.; Kutuza, B.G.; Nikolaev, A.G. The Application of Sea Wave Slope Distribution Empirical Dependences in Estimation of Interaction Between Microwave Radiation and Rough Sea Surface. IEEE Trans. Geosci. Remote Sens. 2009, 47, 652–661. [Google Scholar] [CrossRef]
- Freilich, M.H.; Vanhoff, B.A. The Relationship between Winds, Surface Roughness, and Radar Backscatter at Low Incidence Angles from TRMM Precipitation Radar Measurements. J. Atmos. Ocean. Technol. 2003, 20, 549–562. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, G.; Hauser, D.; Xu, F. Quasi-Gaussian probability density function of sea wave slopes from near nadir Ku-band radar observations. Remote Sens. Environ. 2018, 217, 86–100. [Google Scholar] [CrossRef]
- Hauser, D.; Tison, C.; Amiot, T.; Delaye, L.; Corcoral, N.; Castillan, P. SWIM: The First Spaceborne Wave Scatterometer. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3000–3014. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Titchenko, Y.; Jie, G.; Karaev, V.; Ponur, K.; Ryabkova, M.; Baranov, V.; Ocherednik, V.; He, Y. Preliminary Performance Assessment of the Wave Parameter Retrieval Algorithm from the Average Reflected Pulse. Remote Sens. 2024, 16, 418. https://doi.org/10.3390/rs16020418
Titchenko Y, Jie G, Karaev V, Ponur K, Ryabkova M, Baranov V, Ocherednik V, He Y. Preliminary Performance Assessment of the Wave Parameter Retrieval Algorithm from the Average Reflected Pulse. Remote Sensing. 2024; 16(2):418. https://doi.org/10.3390/rs16020418
Chicago/Turabian StyleTitchenko, Yuriy, Guo Jie, Vladimir Karaev, Kirill Ponur, Maria Ryabkova, Vladimir Baranov, Vladimir Ocherednik, and Yijun He. 2024. "Preliminary Performance Assessment of the Wave Parameter Retrieval Algorithm from the Average Reflected Pulse" Remote Sensing 16, no. 2: 418. https://doi.org/10.3390/rs16020418
APA StyleTitchenko, Y., Jie, G., Karaev, V., Ponur, K., Ryabkova, M., Baranov, V., Ocherednik, V., & He, Y. (2024). Preliminary Performance Assessment of the Wave Parameter Retrieval Algorithm from the Average Reflected Pulse. Remote Sensing, 16(2), 418. https://doi.org/10.3390/rs16020418