
Mapping Cones on Mars in High-Resolution Planetary Images with Deep Learning-Based Instance Segmentation

Abstract
1. Introduction
- (1)
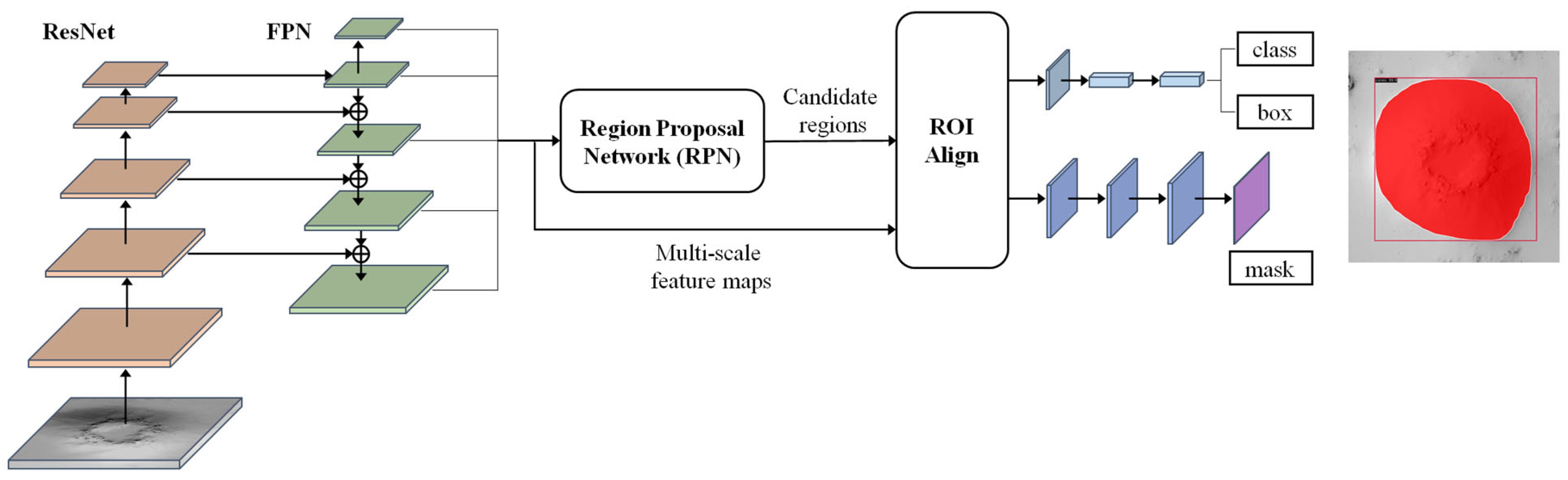
- For the comprehensive identification of Martian cones, we use cones with different origins and distributed in different spatial locations as training samples. The Feature Pyramid Network-equipped Mask-RCNN model is introduced to Mars cone instance segmentation. This model not only effectively detects the cones in the image but also generates high-quality segmentation masks for each cone.
- (2)
- The Feature Pyramid Network fuses the features extracted by the convolutional network backbone at different levels in a top-down manner, which is suitable for the different scales of cones in high-resolution images, and thus provides a higher cone recognition performance.
- (3)
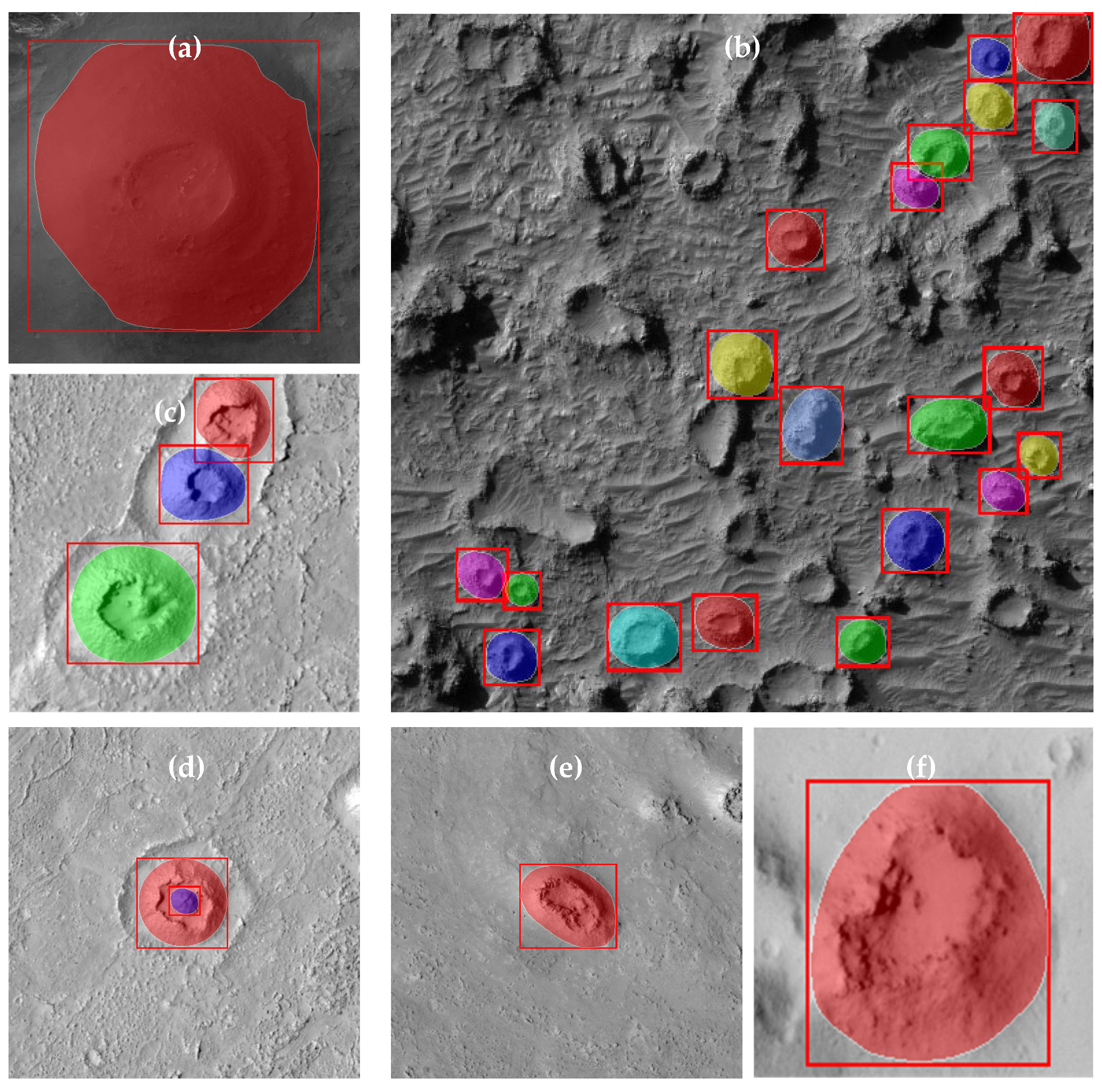
- Instance segmentation of the Martian cone dataset was carried out based on deep learning (DL-MCD) with 3681 cones, which is 180 more than the initial number of annotated cones. In this dataset, the locations and morphological characteristics, e.g., cone width and basal dip angle, are provided to explore geological processes on the surface of Mars.
2. Data and Methods
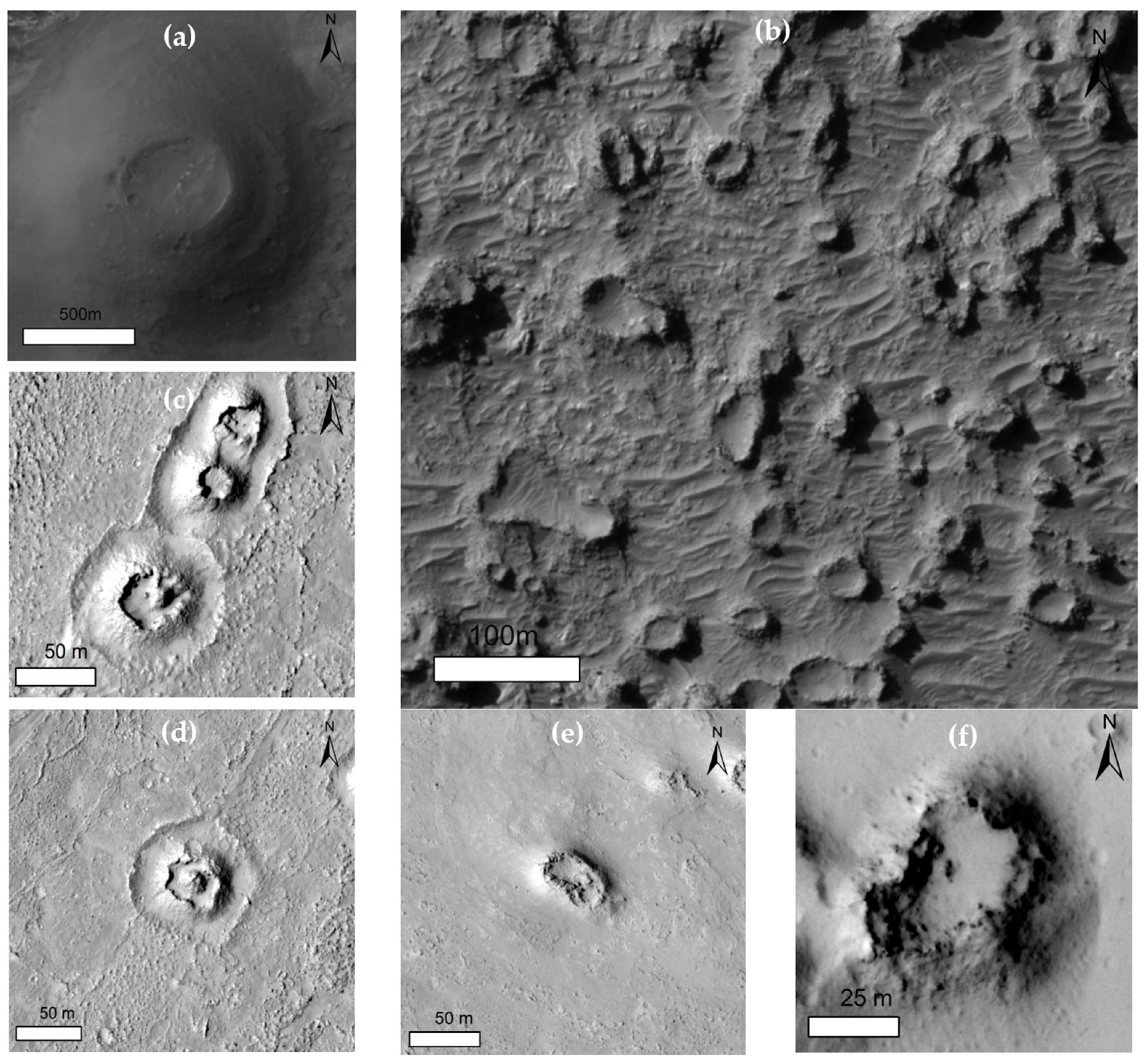
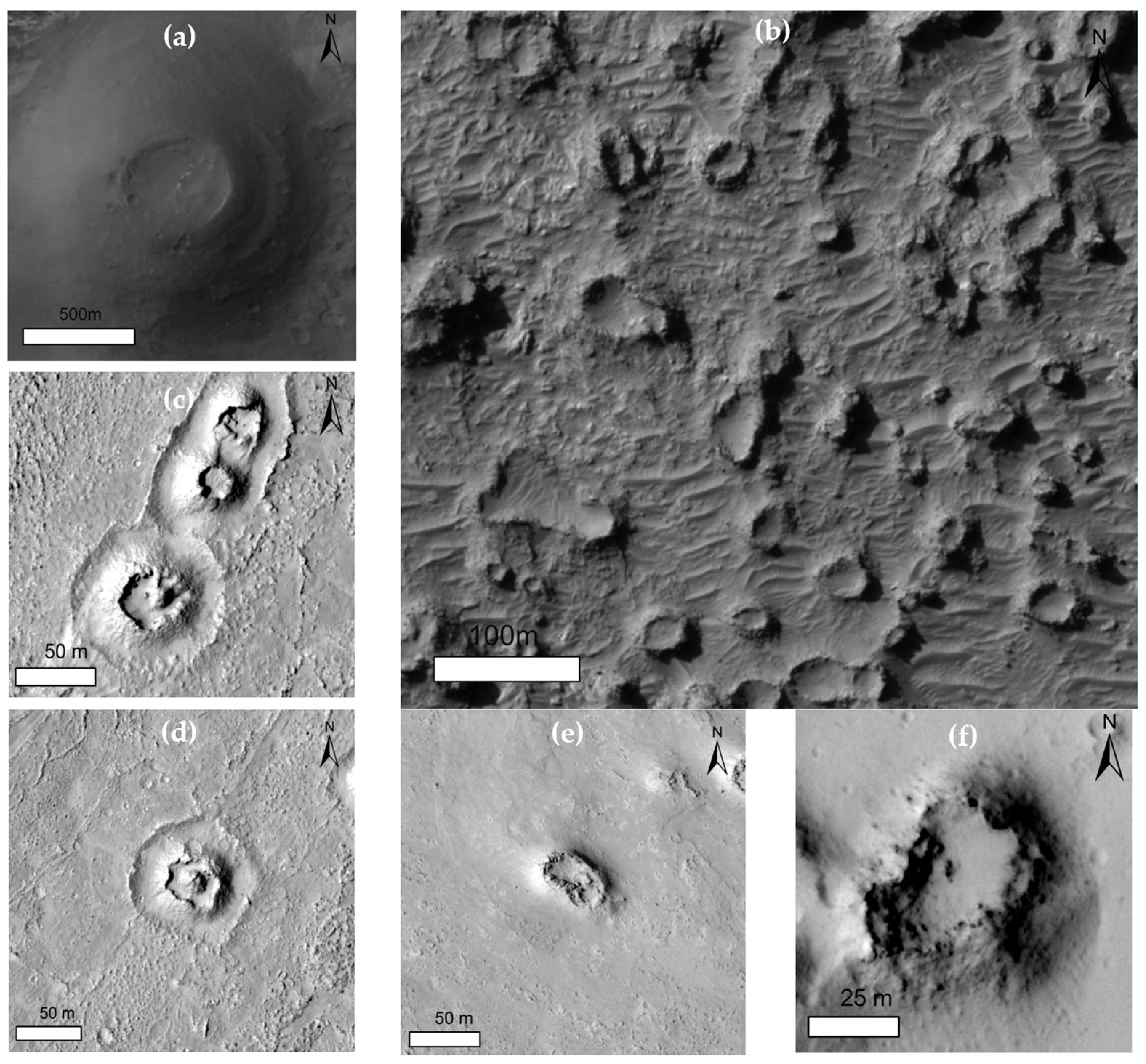
2.1. Description of Dataset
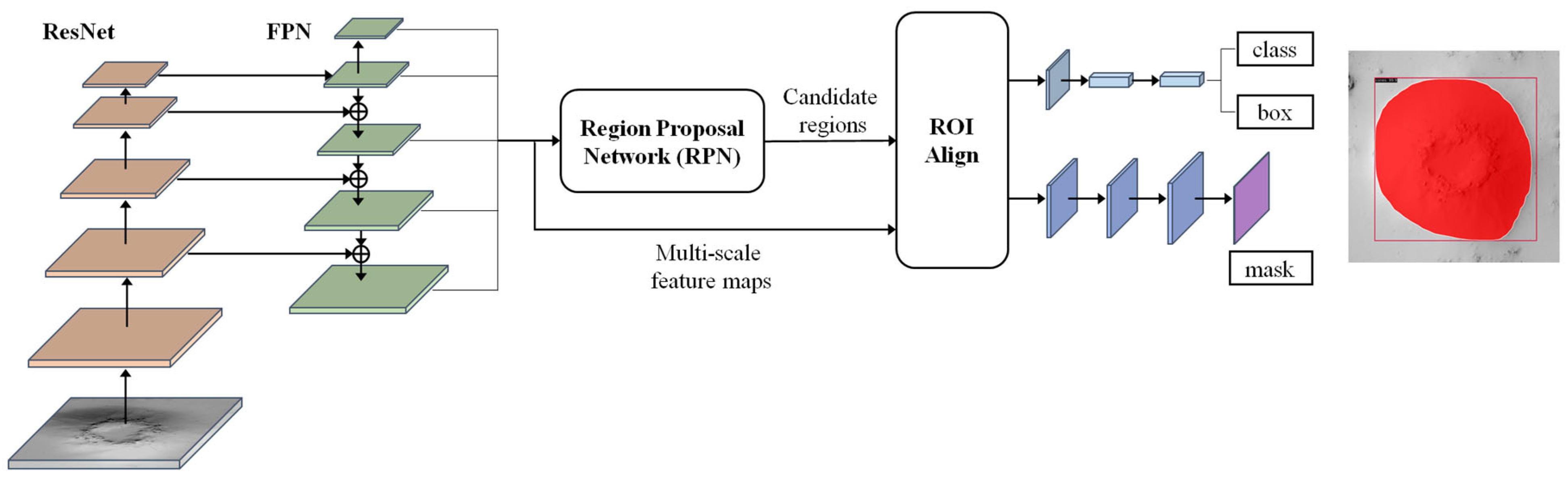
2.2. Identification of Cones with Deep Learning-Based Instance Segmentation
2.2.1. Multi-Scale Feature Extraction
2.2.2. Region Proposal Network (RPN)
2.2.3. ROIAlign Module
2.2.4. Instance Segmentation Head
3. Experiments and Results
3.1. Experiment Design
3.1.1. Training Strategy
3.1.2. Evaluation Metrics
3.1.3. Implementation Details and Parameter Settings
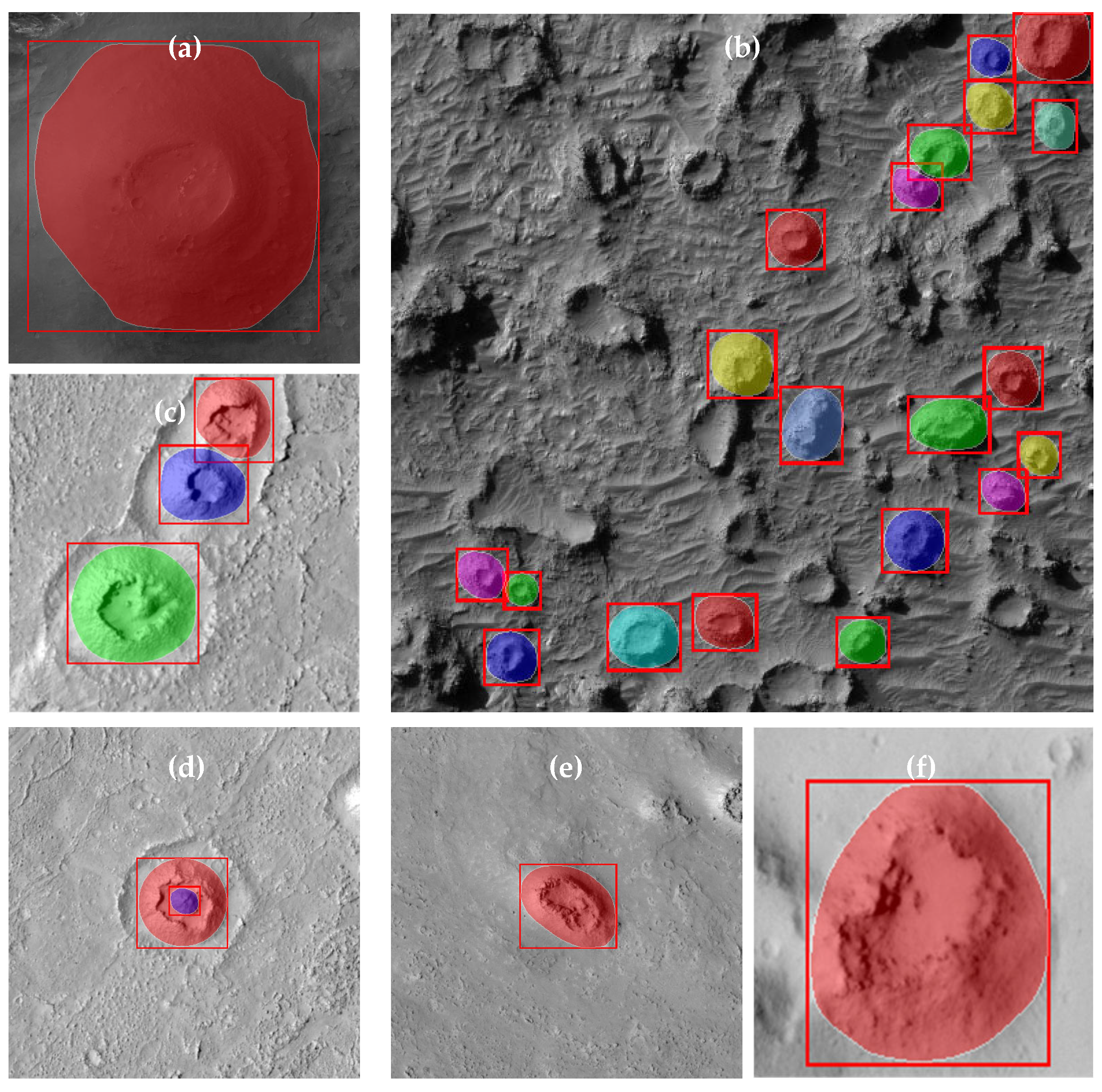
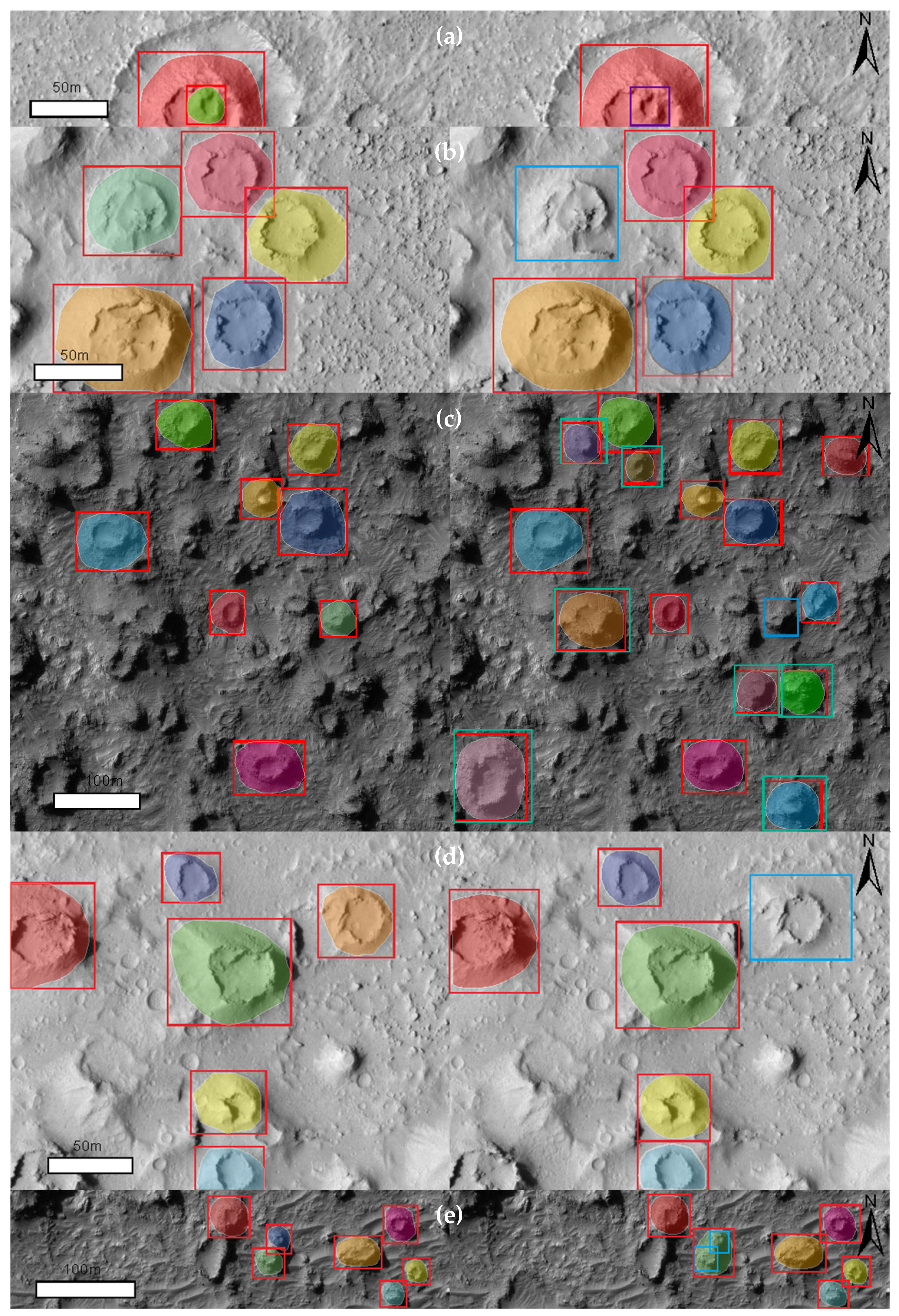
3.2. Results
Deep Learning-Based Instance Segmentation Martian Cone Dataset (DL-MCD)
4. Discussion
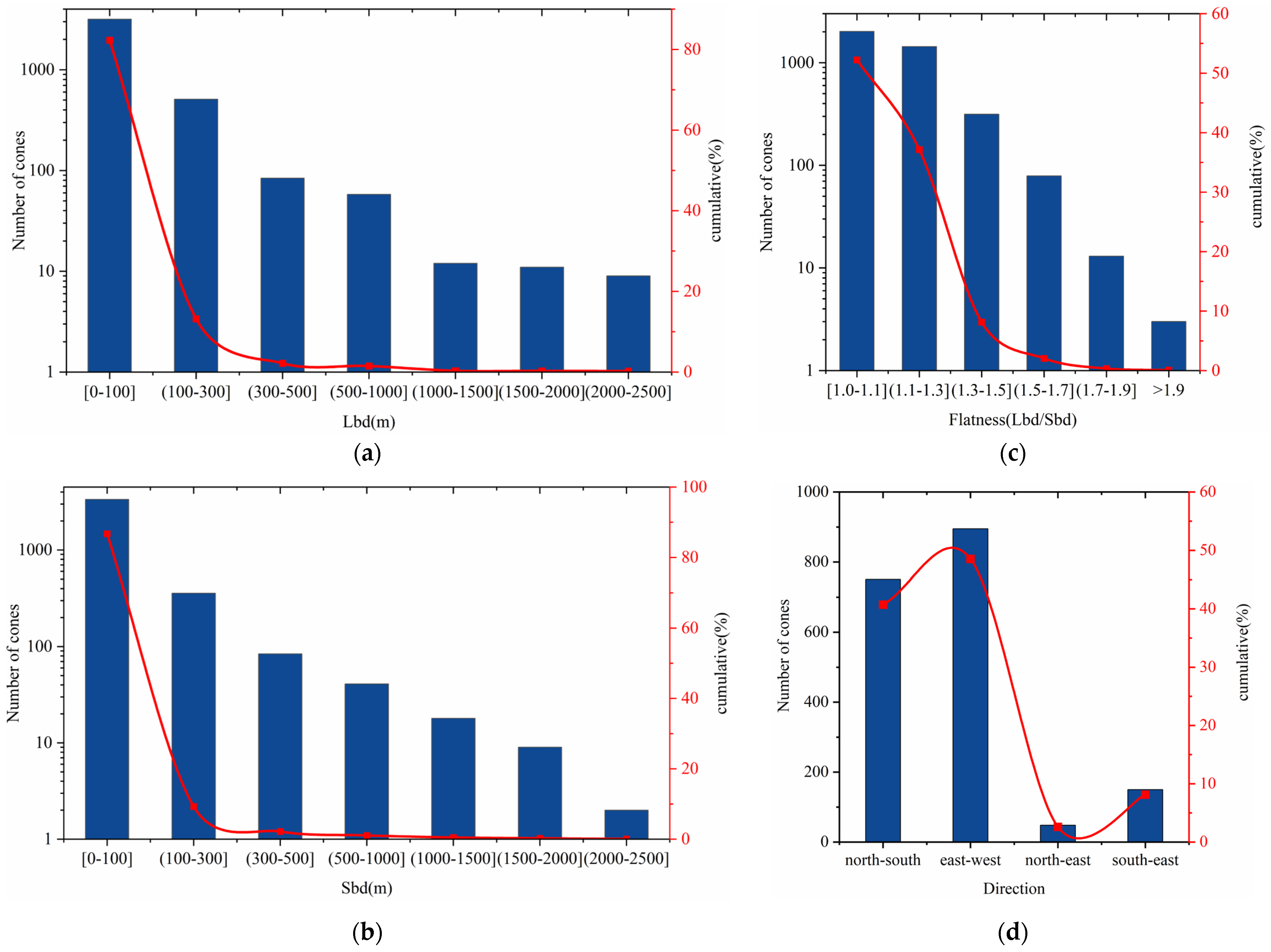
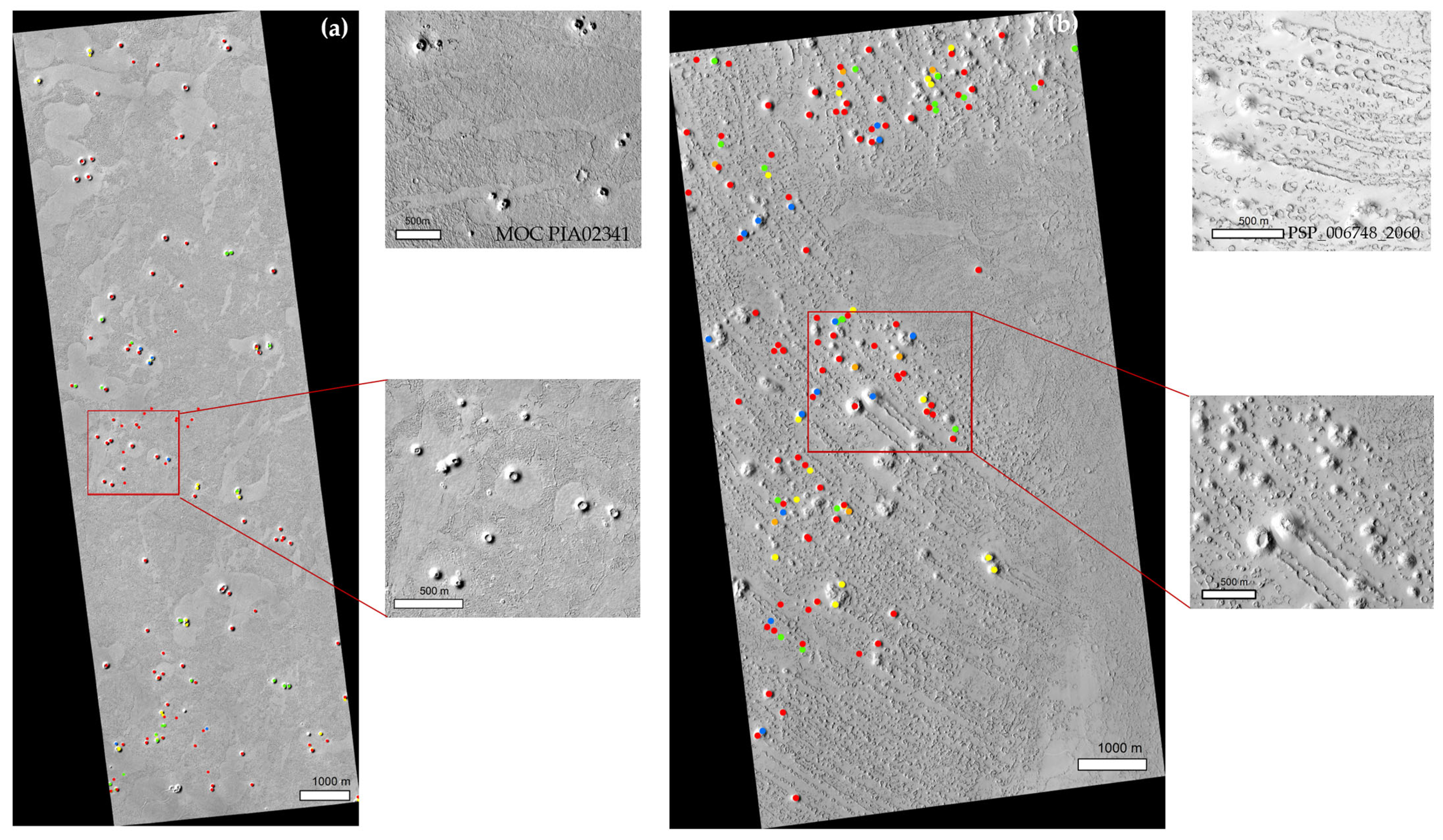
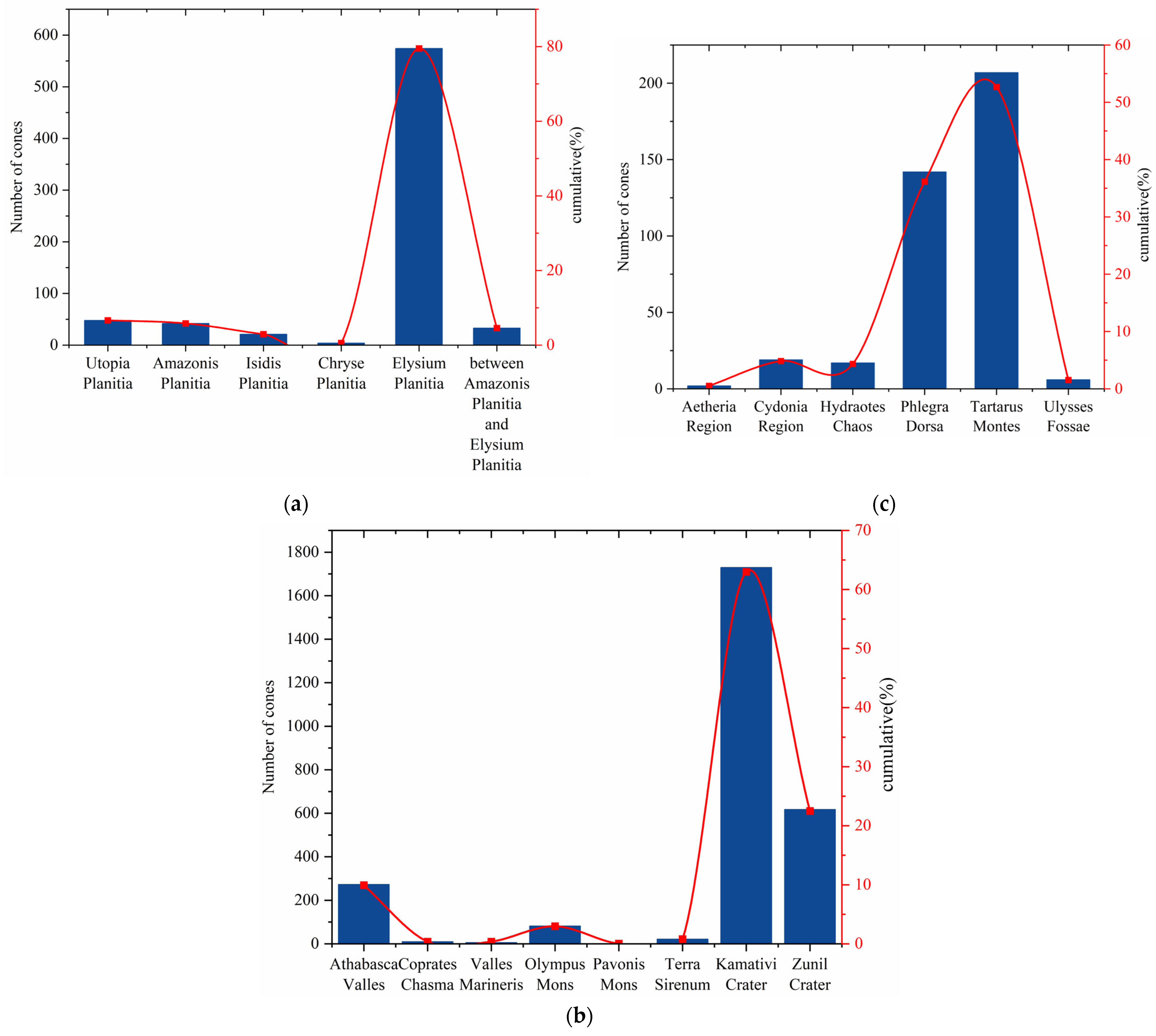
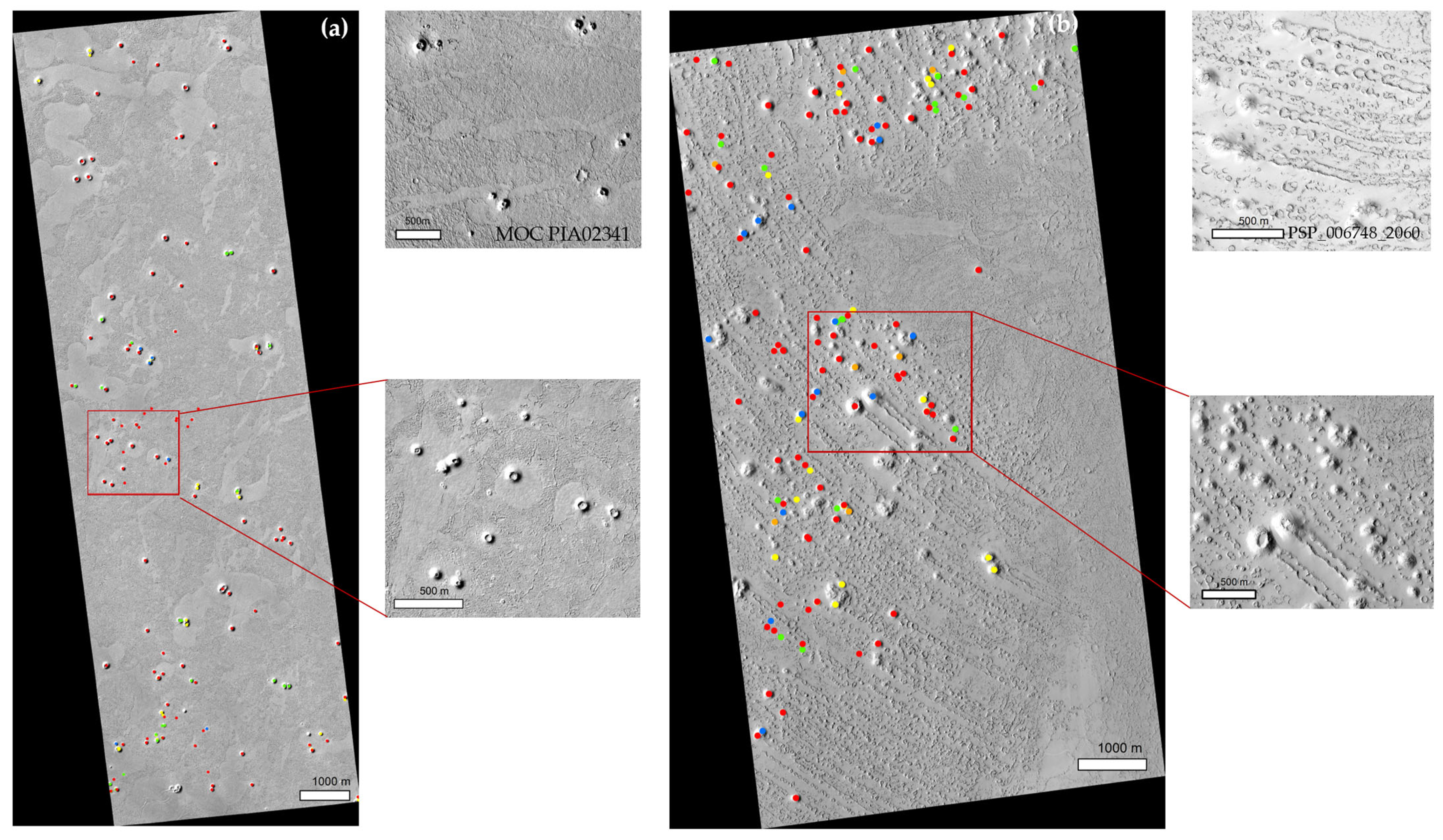
4.1. Spatial Distribution Analysis
4.2. Morphological Parameter Analysis
4.3. Further Discussion on the Experiments
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, C.; Zheng, Y.; Wang, X.; Zhang, J.; Wang, Y.; Chen, L.; Zhang, L.; Zhao, P.; Liu, Y.; Lv, W.; et al. Layered subsurface in Utopia Basin of Mars revealed by Zhurong rover radar. Nature 2022, 610, 308–312. [Google Scholar] [CrossRef] [PubMed]
- Noguchi, R.; Kurita, K. Cones on Mars with Special Reference to Volcanic Cone Morphology. J. Geogr. 2016, 125, 35–48. [Google Scholar] [CrossRef]
- Brož, P.; Čadek, O.; Hauber, E.; Rossi, A.P. Scoria Cones on Mars: Detailed Investigation of Morphometry Based on High-Resolution Digital Elevation Models. J. Geophys. Res. Planets 2015, 120, 1512–1527. [Google Scholar] [CrossRef]
- Meresse, S.; Costard, F.; Mangold, N.; Masson, P.; Neukum, G. Formation and Evolution of the Chaotic Terrains by Subsidence and Magmatism: Hydraotes Chaos, Mars. Icarus 2008, 194, 487–500. [Google Scholar] [CrossRef]
- Noguchi, R.; Kurita, K. Unique Characteristics of Cones in Central Elysium Planitia, Mars. Planet. Space Sci. 2015, 111, 44–54. [Google Scholar] [CrossRef]
- Hamilton, C.W.; Fagents, S.A.; Thordarson, T. Lava–Ground Ice Interactions in Elysium Planitia, Mars: Geomorphological and Geospatial Analysis of the Tartarus Colles Cone Groups. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Brož, P.; Hauber, E. Hydrovolcanic Tuff Rings and Cones as Indicators for Phreatomagmatic Explosive Eruptions on Mars. J. Geophys. Res. Planets 2013, 118, 1656–1675. [Google Scholar] [CrossRef]
- Hemmi, R.; Miyamoto, H. Distribution, Morphology, and Morphometry of Circular Mounds in the Elongated Basin of Northern Terra Sirenum, Mars. Prog. Earth Planet. Sci. 2017, 4, 1–15. [Google Scholar] [CrossRef]
- Komatsu, G.; Okubo, C.H.; Wray, J.J.; Ojha, L.; Cardinale, M.; Murana, A.; Orosei, R.; Chan, M.A.; Ormö, J.; Gallagher, R. Small Edifice Features in Chryse Planitia, Mars: Assessment of a Mud Volcano Hypothesis. Icarus 2016, 268, 56–75. [Google Scholar] [CrossRef]
- Brož, P.; Hauber, E.; van de Burgt, I.; Špillar, V.; Michael, G. Subsurface Sediment Mobilization in the Southern Chryse Planitia on Mars. J. Geophys. Res. Planets 2019, 124, 703–720. [Google Scholar] [CrossRef]
- Ivanov, M.A.; Hiesinger, H.; Erkeling, G.; Reiss, D. Mud Volcanism and Morphology of Impact Craters in Utopia Planitia on Mars: Evidence for the Ancient Ocean. Icarus 2014, 228, 121–140. [Google Scholar] [CrossRef]
- DEPABLO, M.; KOMATSU, G. Possible Pingo Fields in the Utopia Basin, Mars: Geological and Climatical Implications. Icarus 2009, 199, 49–74. [Google Scholar] [CrossRef]
- Dundas, C.M.; McEwen, A.S. An Assessment of Evidence for Pingos on Mars Using HiRISE. Icarus 2010, 205, 244–258. [Google Scholar] [CrossRef]
- Lanz, J.K.; Saric, M.B. Cone Fields in SW Elysium Planitia: Hydrothermal Venting on Mars? J. Geophys. Res. Planets 2009, 114. [Google Scholar] [CrossRef]
- Brož, P.; Bernhardt, H.; Conway, S.J.; Parekh, R. An Overview of Explosive Volcanism on Mars. J. Volcanol. Geotherm. Res. 2021, 409, 107125. [Google Scholar] [CrossRef]
- Brož, P.; Hauber, E. A Unique Volcanic Field in Tharsis, Mars: Pyroclastic Cones as Evidence for Explosive Eruptions. Icarus 2012, 218, 88–99. [Google Scholar] [CrossRef]
- Allen, C.C. Volcano-Ice Interactions on Mars. J. Geophys. Res. Solid Earth 1979, 84, 8048–8059. [Google Scholar] [CrossRef]
- Frey, H.; Lowry, B.L.; Chase, S.A. Pseudocraters on Mars. J. Geophys. Res. Solid Earth 1979, 84, 8075–8086. [Google Scholar] [CrossRef]
- Frey, H.; Jarosewich, M. Subkilometer Martian Volcanoes: Properties and Possible Terrestrial Analogs. J. Geophys. Res. Solid Earth 1982, 87, 9867–9879. [Google Scholar] [CrossRef]
- Farrand, W.H.; Gaddis, L.R.; Keszthelyi, L. Pitted Cones and Domes on Mars: Observations in Acidalia Planitia and Cydonia Mensae Using MOC, THEMIS, and TES Data. J. Geophys. Res. Planets 2005, 110. [Google Scholar] [CrossRef]
- Hauber, E.; Brož, P.; Rossi, A.P.; Michael, G. A Field of Small Pitted Cones on the Floor of Coprates Chasma: Volcanism inside Valles Marineris. In Proceedings of the European Planetary Science Congress 2015, Nantes, France, 27 September–2 October 2015. [Google Scholar]
- Dapremont, A.M.; Wray, J.J. Igneous or Mud Volcanism on Mars? The Case Study of Hephaestus Fossae. J. Geophys. Res. Planets 2021, 126, e2020JE006390. [Google Scholar] [CrossRef]
- Huang, H.; Liu, J.; Wang, X.; Chen, Y.; Zhang, Q.; Liu, D.; Yan, W.; Ren, X. The Analysis of Cones within the Tianwen-1 Landing Area. Remote Sens. 2022, 14, 2590. [Google Scholar] [CrossRef]
- Hamilton, C.W.; Plug, L.J. Identification of Volcanic Rootless Cones and Impact Craters Using Artificial Neural Networks. In Proceedings of the AGU Spring Meeting Abstracts, Montreal, Canada, 17–21 May 2004; p. P33D-09. [Google Scholar]
- Palafox, L.; Alvarez, A.; Hamilton, C. Automated Detection of Impact Craters and Volcanic Rootless Cones in Mars Satellite Imagery Using Convolutional Neural Networks and Support Vector Machines. In Proceedings of the Lunar and Planetary Science Conference, Lunar and Planetary Science Conference, The Woodlands, TX, USA, 16–20 March 2015. [Google Scholar]
- Palafox, L.F.; Hamilton, C.W.; Scheidt, S.P.; Alvarez, A.M. Automated Detection of Geological Landforms on Mars Using Convolutional Neural Networks. Comput. Geosci. 2017, 101, 48–56. [Google Scholar] [CrossRef] [PubMed]
- Pieterek, B.; Grochowski, M.; Ciążela, J.; Sokolov, O.; Józefowicz, M. Automated Detection of Pitted Cones and Impact Craters: Deep-Learning Approach for Searching Potential Hydrothermal Activity and Related Ore Deposits on Mars. LPI Contrib. 2022, 2678, 1328. [Google Scholar]
- Wu, B.; Dong, J.; Wang, Y.; Li, Z.; Chen, Z.; Liu, W.C.; Zhu, J.; Chen, L.; Li, Y.; Rao, W. Characterization of the Candidate Landing Region for Tianwen-1—China’s First Mission to Mars. Earth Space Sci. 2021, 8, e2021EA001670. [Google Scholar] [CrossRef]
- Hamilton, C.W.; Fagents, S.A.; Wilson, L. Explosive Lava-water Interactions in Elysium Planitia, Mars: Geologic and Thermodynamic Constraints on the Formation of the Tartarus Colles Cone Groups. J. Geophys. Res. Planets 2010, 115. [Google Scholar] [CrossRef]
- Dundas, C.M.; Mellon, M.T.; McEwen, A.S.; Lefort, A.; Keszthelyi, L.P.; Thomas, N. HiRISE Observations of Fractured Mounds: Possible Martian Pingos. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Keszthelyi, L.P.; Jaeger, W.L.; Dundas, C.M.; Martínez-Alonso, S.; McEwen, A.S.; Milazzo, M.P. Hydrovolcanic Features on Mars: Preliminary Observations from the First Mars Year of HiRISE Imaging. Icarus 2010, 205, 211–229. [Google Scholar] [CrossRef]
- Vörös, F.; Székely, B. Preliminary Geomorphometric Analysis of Selected Martian Scoria Cone-like Features Using High-Resolution DTMs. Abstr. ICA 2021, 3, 1–2. [Google Scholar] [CrossRef]
- Németh, K. Rootless Cone/Vent. In Encyclopedia of Planetary Landforms; Springer Science + Business Media: New York, NY, USA, 2015; pp. 1829–1834. [Google Scholar]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 386–397. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Jaeger, W.L.; Keszthelyi, L.; Galuszka, D.; Kirk, R.L.; Team, H. Morphologic Characteristics and Global Distribution of Phreato-Volcanic Constructs on Mars as Seen by HiRISE. In Proceedings of the 39th Annual Lunar and Planetary Science Conference, League City, TX, USA, 10–14 March 2008; Volume 1391, p. 2428. [Google Scholar]
- McEwen, A.S.; Eliason, E.M.; Bergstrom, J.W.; Bridges, N.T.; Hansen, C.J.; Delamere, W.A.; Grant, J.A.; Gulick, V.C.; Herkenhoff, K.E.; Keszthelyi, L.; et al. Mars Reconnaissance Orbiter’s High Resolution Imaging Science Experiment (HiRISE). J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object Detection | Object Segmentation | Time (s) | ||
|---|---|---|---|---|
| Recall (%) | Precision (%) | mAR (%) | mAP (%) | 0.52 |
| 92.1 | 84.8 | 92.2 | 84.9 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Zhang, N.; Guan, R.; Zhao, H. Mapping Cones on Mars in High-Resolution Planetary Images with Deep Learning-Based Instance Segmentation. Remote Sens. 2024, 16, 227. https://doi.org/10.3390/rs16020227
Yang C, Zhang N, Guan R, Zhao H. Mapping Cones on Mars in High-Resolution Planetary Images with Deep Learning-Based Instance Segmentation. Remote Sensing. 2024; 16(2):227. https://doi.org/10.3390/rs16020227
Chicago/Turabian StyleYang, Chen, Nan Zhang, Renchu Guan, and Haishi Zhao. 2024. "Mapping Cones on Mars in High-Resolution Planetary Images with Deep Learning-Based Instance Segmentation" Remote Sensing 16, no. 2: 227. https://doi.org/10.3390/rs16020227
APA StyleYang, C., Zhang, N., Guan, R., & Zhao, H. (2024). Mapping Cones on Mars in High-Resolution Planetary Images with Deep Learning-Based Instance Segmentation. Remote Sensing, 16(2), 227. https://doi.org/10.3390/rs16020227