
Identification of Lunar Craters in the Chang’e-5 Landing Region Based on Kaguya TC Morning Map
 , ,
, ,
Abstract

1. Introduction
2. Materials and Methods
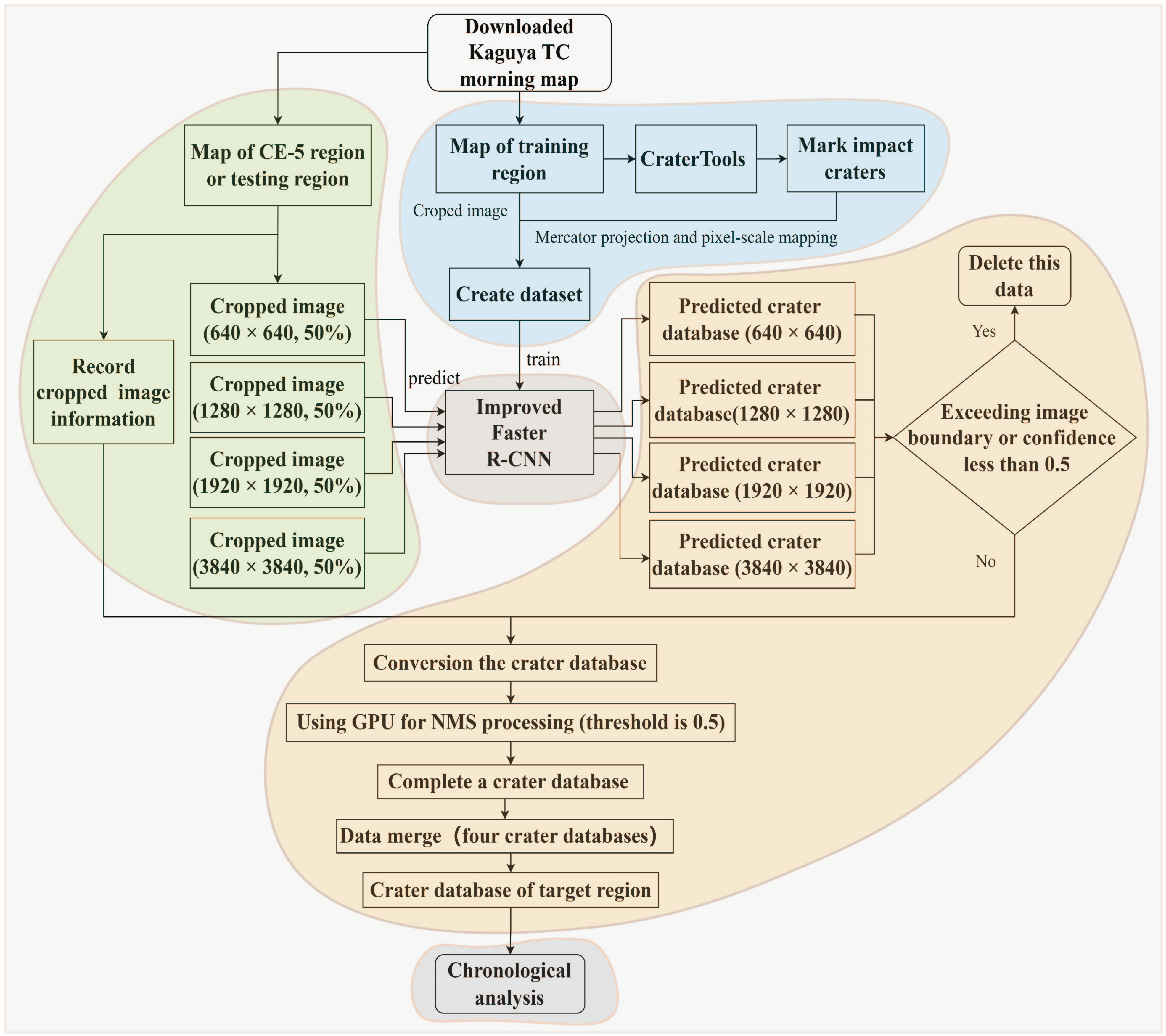
2.1. Data Preparation
2.1.1. Preparation before Creating Dataset
2.1.2. Region Partitioning and Dataset Generation
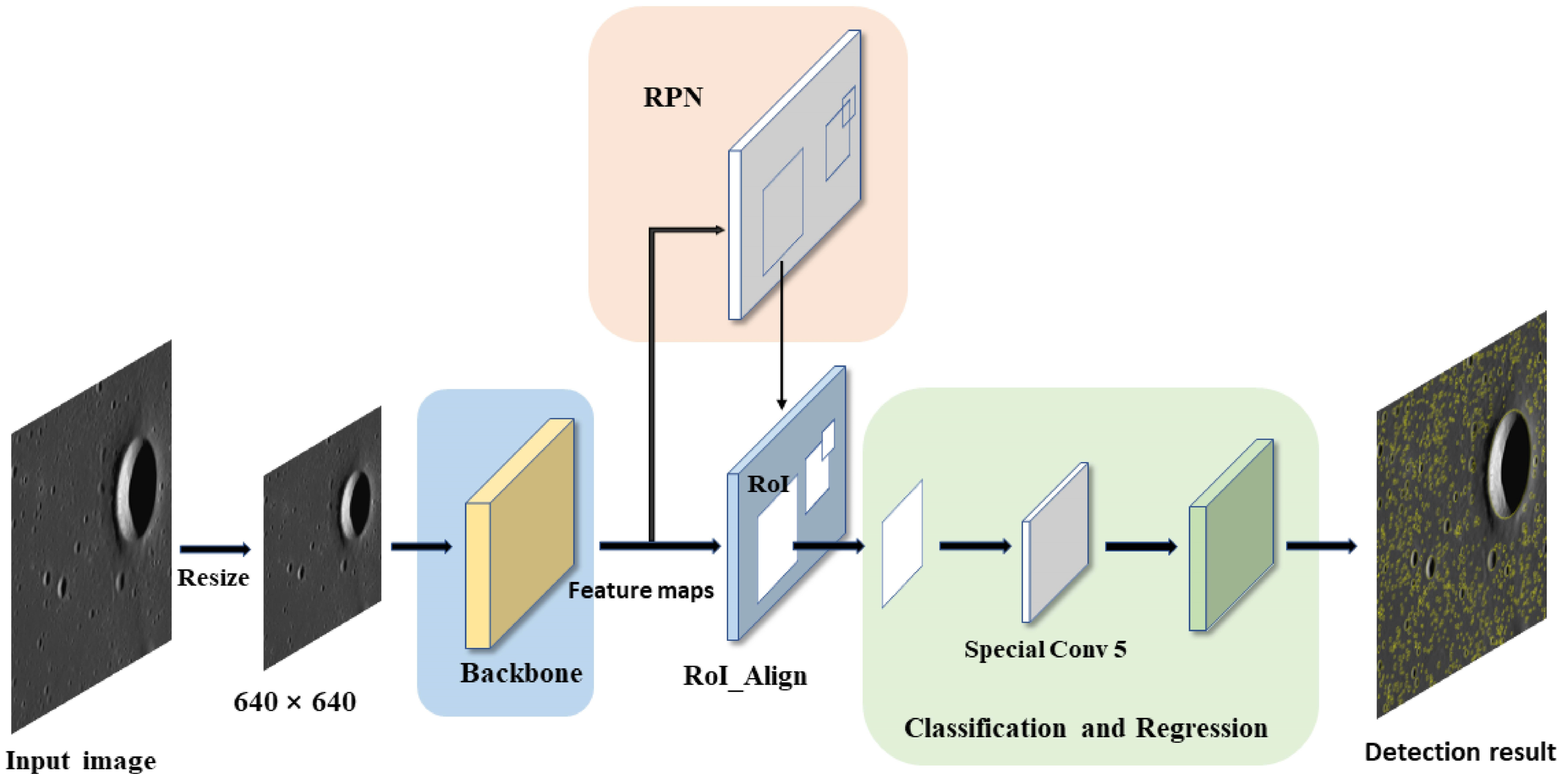
2.2. Neural Network Architecture
- Resize Processing: The first part involves resizing the input images to the fixed size required by the improved Faster R-CNN.
- Backbone: The second part consists of the backbone, which employs ResNet-50 to generate feature maps of a specific size. These feature maps are instrumental in extracting essential feature information from the images.
- RPN: The third part is the RPN, which primarily focuses on extracting the region of interest that potentially contains the target.
- Classification and Regression: The fourth part includes convolutional and pooling layers used to output detection positions and classification information for the target images.
- Additionally, Table 1 elucidates the alterations in improved Faster R-CNN feature maps at different stages, helping to understand the feature extraction process.
2.3. Preprocessing of Images in the Prediction Region
2.4. Postprocessing
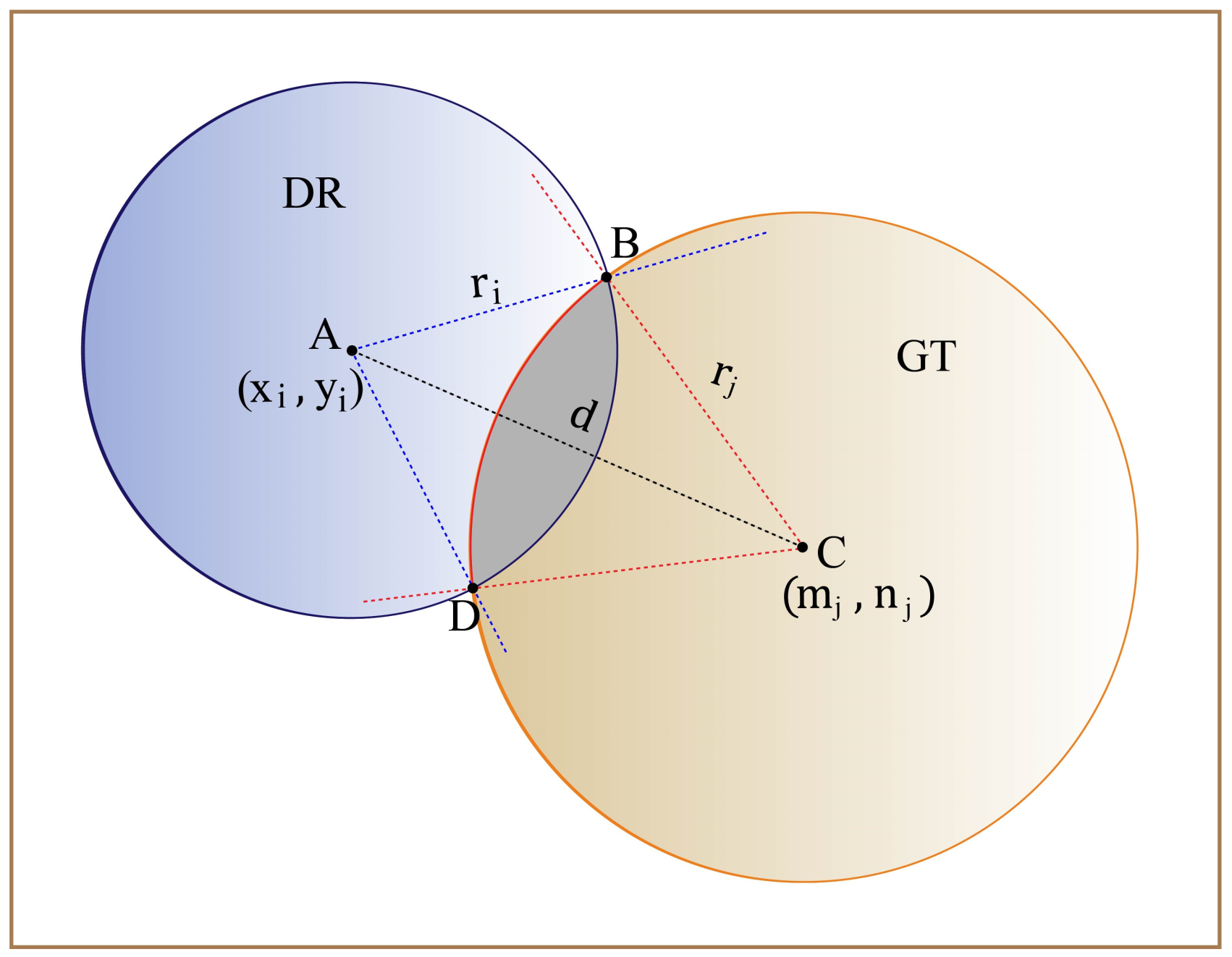
2.4.1. Data Processing for Predicted Impact Craters
- Extracting an impact crater coordinate data from one of the databases.
- Then calculate the intersection over union (IoU) value with all the coordinates of another impact crater database.
- If a coordinate has an IoU value greater than 0.5, consider that both databases have detected the same impact crater. Calculate the average coordinates and confidence score of the two prediction results and retain the merged result. If the value of the intersection ratio is less than 0.5, it means that the two crater databases did not detect the same impact crater, and the data will be discarded.
- Repeat this process until all coordinate data from one database has been processed.
- Continue this merging process iteratively, merging multiple databases step by step; a comprehensive database containing all impact craters is eventually obtained.
2.4.2. Processing Ground Truth Data for Impact Crater
2.4.3. Extraction Method for Impact Crater
2.5. Model Evaluation
2.6. Chronological Method
3. Results
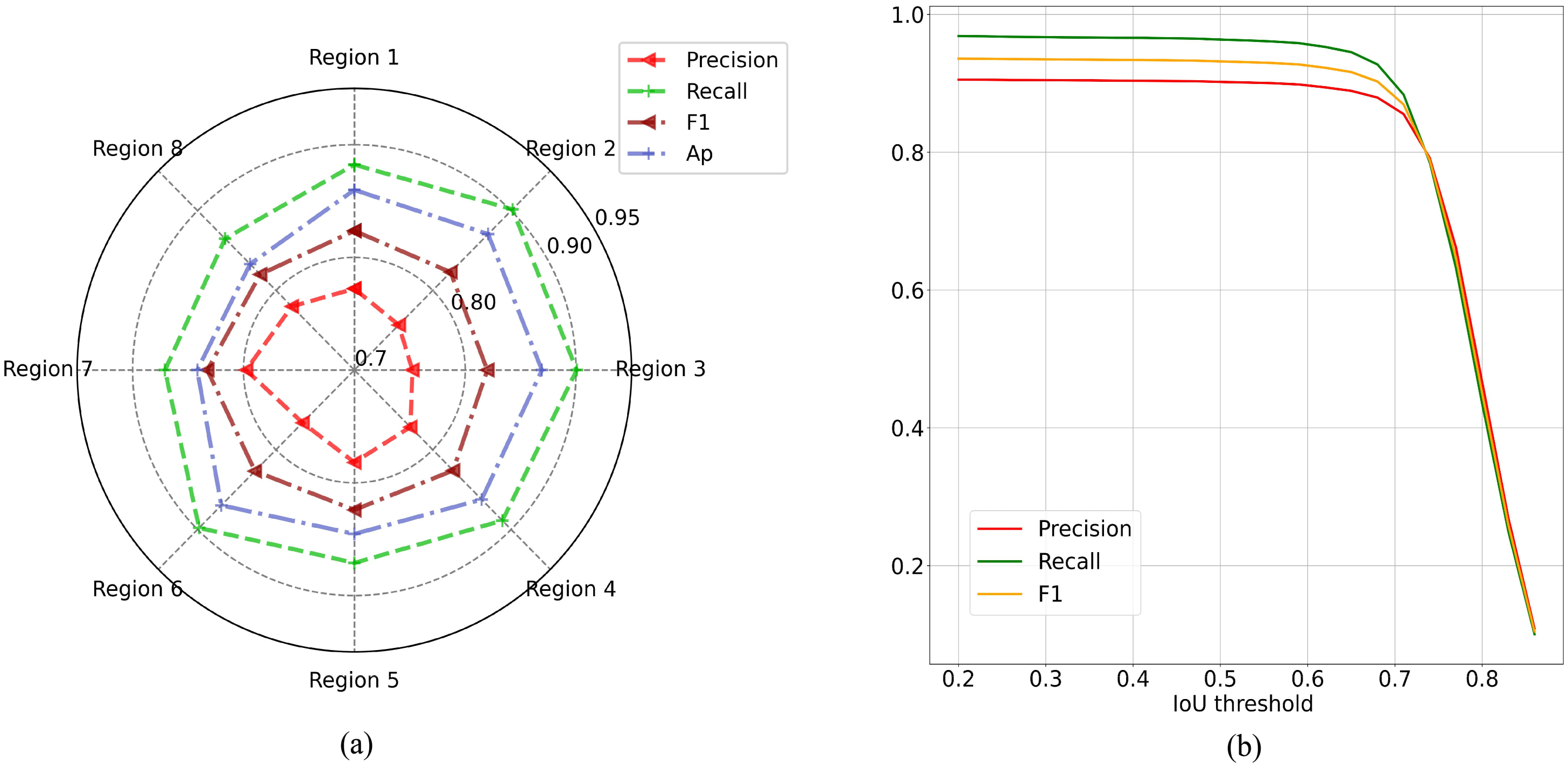
3.1. Model Evaluation of Test Region
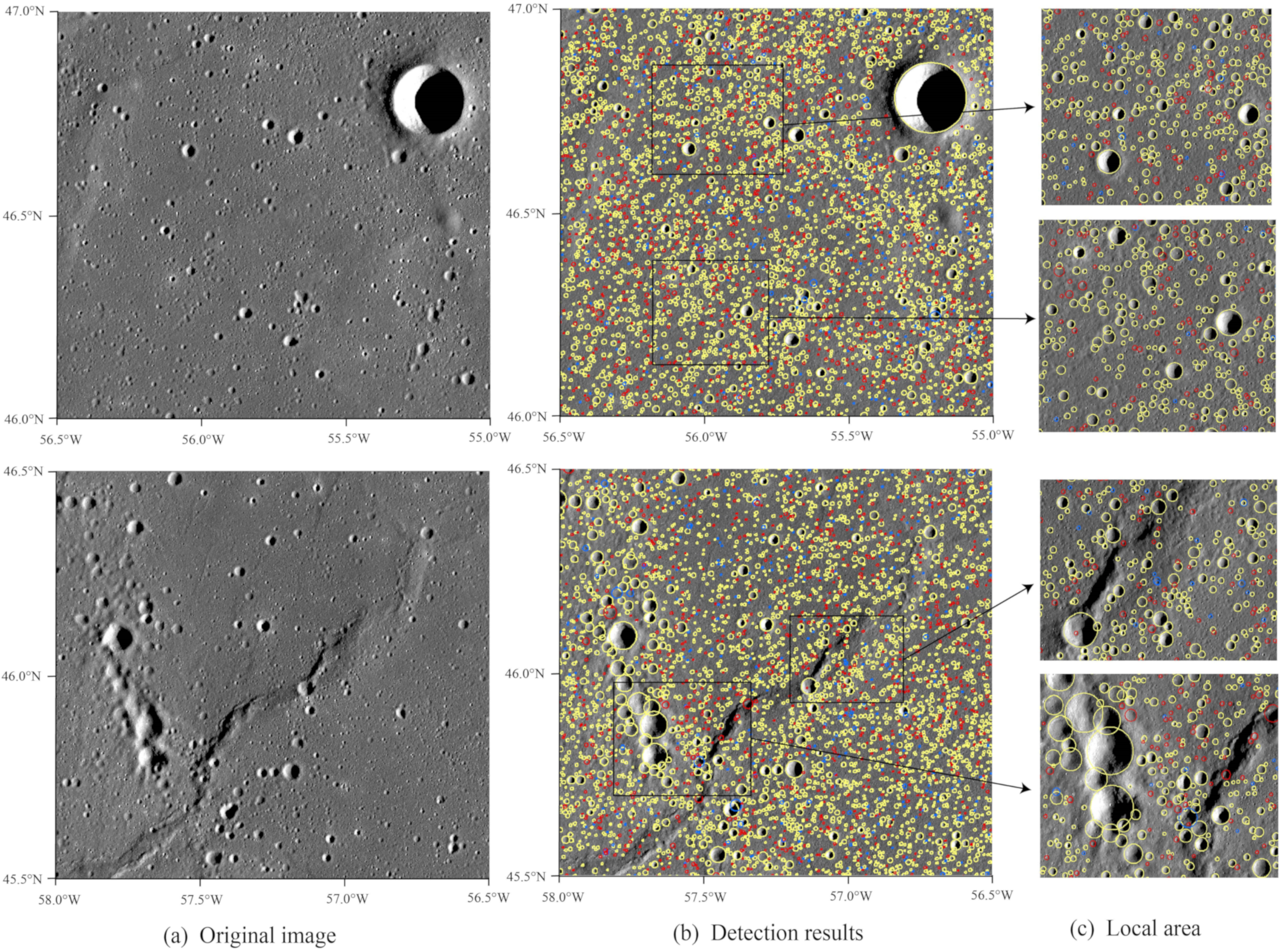
3.2. Identification of the CE-5 Region
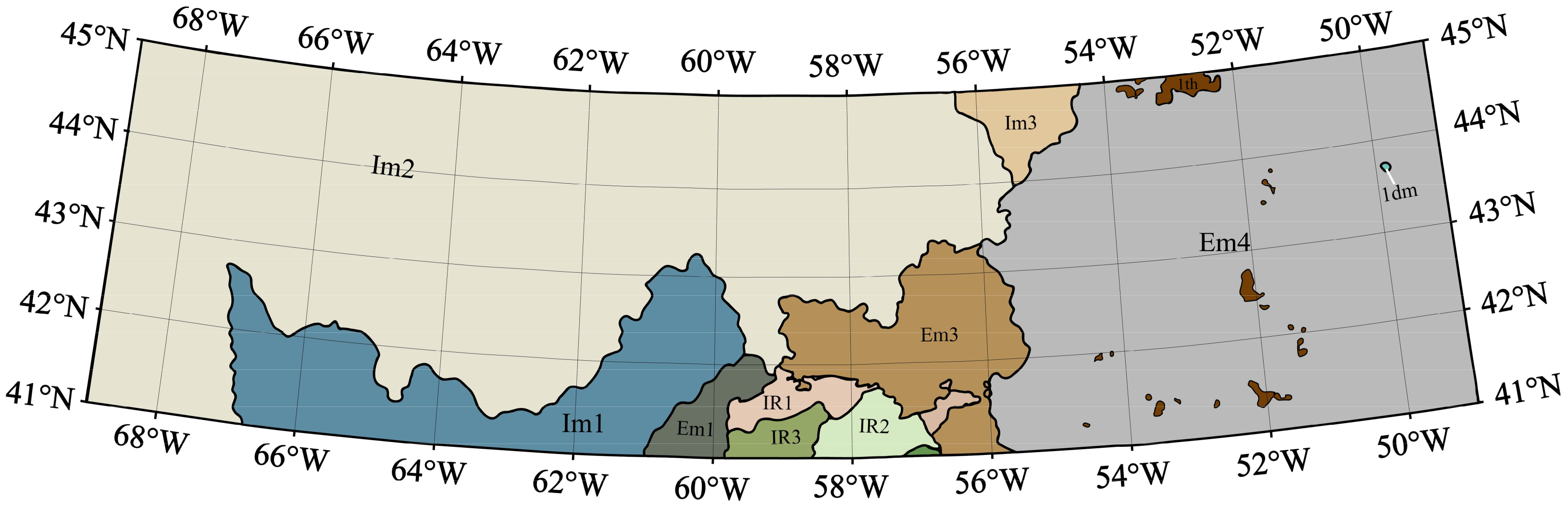
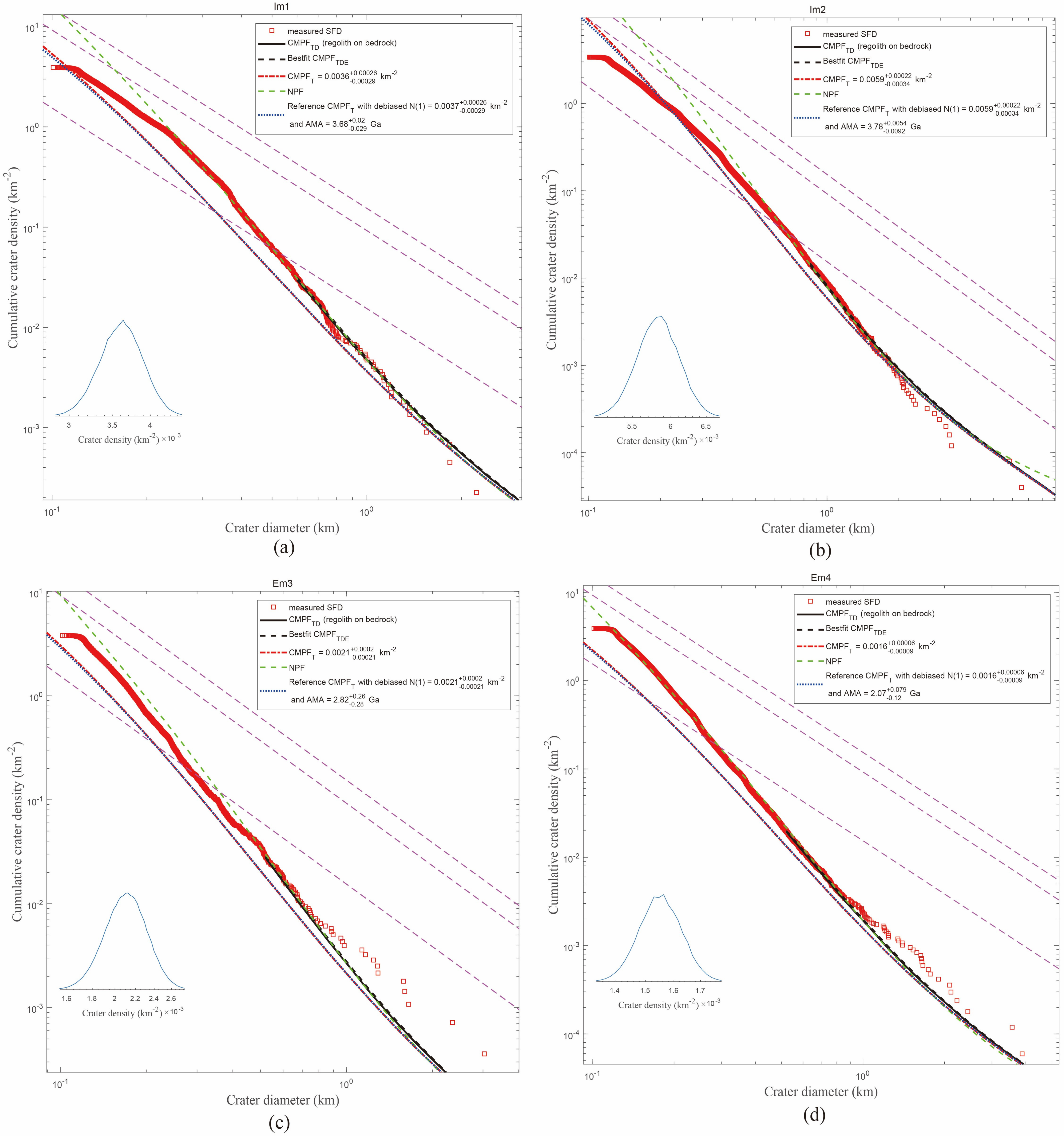
3.3. Chronological Analysis of Selected Geological Units in the CE-5 Region
4. Discussion
4.1. New Evaluation Metrics
4.2. Identification Performance in the Test Region
4.3. Density Analysis of the CE-5 Region
4.4. Chronological Analysis of CE-5 Geological Units
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Hiesinger, H.; Head, J.W., III; Wolf, U.; Jaumann, R.; Neukum, G. Ages and Stratigraphy of Mare Basalts in Oceanus Procellarum, Mare Nubium, Mare Cognitum, and Mare Insularum. J. Geophys. Res. Planets 2003, 108, 3256–3272. [Google Scholar] [CrossRef]
- Di, K.; Li, W.; Yue, Z.; Sun, Y.; Liu, Y. A Machine Learning Approach to Crater Detection from Topographic Data. Adv. Space Res. 2014, 54, 2419–2429. [Google Scholar] [CrossRef]
- Gou, S.; Yue, Z.; Di, K.; Cai, Z.; Liu, Z.; Niu, S. Absolute Model Age of Lunar Finsen Crater and Geologic Implications. Icarus 2021, 354, 114046. [Google Scholar] [CrossRef]
- Qiao, L.; Xu, L.; Yang, Y.; Xie, M.; Chen, J.; Fang, K.; Ling, Z. Cratering Records in the Chang’e-5 Mare Unit: Filling the “Age Gap” of the Lunar Crater Chronology and Preparation for Its Recalibration. Geophys. Res. Lett. 2021, 48, e2021GL095132. [Google Scholar] [CrossRef]
- Wu, B.; Huang, J.; Li, Y.; Wang, Y.; Peng, J. Rock Abundance and Crater Density in the Candidate Chang’E-5 Landing Region on the Moon. J. Geophys. Res. Planets 2018, 123, 3256–3272. [Google Scholar] [CrossRef]
- Gault, D.E. Saturation and Equilibrium Conditions for Impact Cratering on the Lunar Surface: Criteria and Implications. Radio Sci. 1970, 5, 273–291. [Google Scholar] [CrossRef]
- Yue, Z.; Di, K.; Liu, Z.; Michael, G.; Jia, M.; Xin, X.; Liu, B.; Peng, M.; Liu, J. Lunar Regolith Thickness Deduced from Concentric Craters in the CE-5 Landing Area. Icarus 2019, 329, 46–54. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Bugiolacchi, R.; Wong, H.K.; Xu, L.; Zhang, X.; Zhang, L.; Zhang, X.; Xiao, L.; Liu, B.; et al. A Complex Paleo-Surface Revealed by the Yutu-2 Rover at the Lunar Farside. Geophys. Res. Lett. 2021, 48, e2021GL095133. [Google Scholar] [CrossRef]
- Kirchoff, M.R.; Schenk, P. Crater Modification and Geologic Activity in Enceladus’ Heavily Cratered Plains: Evidence from the Impact Crater Distribution. Icarus 2009, 202, 656–668. [Google Scholar] [CrossRef]
- Pajola, M.; Barnouin, O.S.; Lucchetti, A.; Hirabayashi, M.; Ballouz, R.-L.; Asphaug, E.; Ernst, C.M.; Della Corte, V.; Farnham, T.; Poggiali, G.; et al. Anticipated Geological Assessment of the (65803) Didymos–Dimorphos System, Target of the DART–LICIACube Mission. Planet. Sci. J. 2022, 3, 210. [Google Scholar] [CrossRef]
- Daly, R.T.; Ernst, C.M.; Barnouin, O.S.; Chabot, N.L.; Rivkin, A.S.; Cheng, A.F.; Adams, E.Y.; Agrusa, H.F.; Abel, E.D.; Alford, A.L.; et al. Successful Kinetic Impact into an Asteroid for Planetary Defence. Nature 2023, 616, 443–447. [Google Scholar] [CrossRef] [PubMed]
- Head, J.W.; Fassett, C.I.; Kadish, S.J.; Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E. Global Distribution of Large Lunar Craters: Implications for Resurfacing and Impactor Populations. Science 2010, 329, 1504–1507. [Google Scholar] [CrossRef]
- Povilaitis, R.Z.; Robinson, M.S.; van der Bogert, C.H.; Hiesinger, H.; Meyer, H.M.; Ostrach, L.R. Crater Density Differences: Exploring Regional Resurfacing, Secondary Crater Populations, and Crater Saturation Equilibrium on the Moon. Planet. Space Sci. 2018, 162, 41–51. [Google Scholar] [CrossRef]
- Robbins, S.J. A New Global Database of Lunar Impact Craters >1–2 Km: 1. Crater Locations and Sizes, Comparisons with Published Databases, and Global Analysis. JGR Planets 2019, 124, 871–892. [Google Scholar] [CrossRef]
- Salamuniccar, G.; Loncaric, S. Method for Crater Detection From Martian Digital Topography Data Using Gradient Value/Orientation, Morphometry, Vote Analysis, Slip Tuning, and Calibration. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2317–2329. [Google Scholar] [CrossRef]
- Xie, Y.; Tang, G.; Yan, S.; Lin, H. Crater Detection Using the Morphological Characteristics of Chang’E-1 Digital Elevation Models. IEEE Geosci. Remote Sens. Lett. 2013, 10, 885–889. [Google Scholar] [CrossRef]
- Liu, D.; Chen, M.; Qian, K.; Lei, M.; Zhou, Y. Boundary Detection of Dispersal Impact Craters Based on Morphological Characteristics Using Lunar Digital Elevation Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5632–5646. [Google Scholar] [CrossRef]
- Zuo, W.; Zhang, Z.; Li, C.; Wang, R.; Yu, L.; Geng, L. Contour-Based Automatic Crater Recognition Using Digital Elevation Models from Chang’E Missions. Comput. Geosci. 2016, 97, 79–88. [Google Scholar] [CrossRef]
- Ding, M.; Cao, Y.; Wu, Q. Novel Approach of Crater Detection by Crater Candidate Region Selection and Matrix-Pattern-Oriented Least Squares Support Vector Machine. Chin. J. Aeronaut. 2013, 26, 385–393. [Google Scholar] [CrossRef]
- Kang, Z.; Wang, X.; Hu, T.; Yang, J. Coarse-to-Fine Extraction of Small-Scale Lunar Impact Craters From the CCD Images of the Chang’E Lunar Orbiters. IEEE Trans. Geosci. Remote Sens. 2019, 57, 181–193. [Google Scholar] [CrossRef]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Tamayo, D.; Menou, K. Lunar Crater Identification via Deep Learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef]
- Yang, C.; Zhao, H.; Bruzzone, L.; Benediktsson, J.A.; Liang, Y.; Liu, B.; Zeng, X.; Guan, R.; Li, C.; Ouyang, Z. Lunar Impact Crater Identification and Age Estimation with Chang’E Data by Deep and Transfer Learning. Nat. Commun. 2020, 11, 6358. [Google Scholar] [CrossRef]
- Tewari, A.; Jain, V.; Khanna, N. Automatic Crater Shape Retrieval Using Unsupervised and Semi-Supervised Systems. arXiv 2022, arXiv:2211.01933. [Google Scholar] [CrossRef]
- Ali-Dib, M.; Menou, K.; Jackson, A.P.; Zhu, C.; Hammond, N. Automated Crater Shape Retrieval Using Weakly-Supervised Deep Learning. Icarus 2020, 345, 113749. [Google Scholar] [CrossRef]
- Wang, S.; Fan, Z.; Li, Z.; Zhang, H.; Wei, C. An Effective Lunar Crater Recognition Algorithm Based on Convolutional Neural Network. Remote Sens. 2020, 12, 2694. [Google Scholar] [CrossRef]
- Jia, Y.; Liu, L.; Zhang, C. Moon Impact Crater Detection Using Nested Attention Mechanism Based UNet++. IEEE Access 2021, 9, 44107–44116. [Google Scholar] [CrossRef]
- Wu, Y.; Wan, G.; Liu, L.; Jia, Y.; Wei, Z.; Wang, S. Fast and Accurate Crater Detection on Martian Surface Using SUNet 3+. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; Volume 6, pp. 683–687. [Google Scholar]
- Mao, Y.; Yuan, R.; Li, W.; Liu, Y. Coupling Complementary Strategy to U-Net Based Convolution Neural Network for Detecting Lunar Impact Craters. Remote Sens. 2022, 14, 661. [Google Scholar] [CrossRef]
- Lin, X.; Zhu, Z.; Yu, X.; Ji, X.; Luo, T.; Xi, X.; Zhu, M.; Liang, Y. Lunar Crater Detection on Digital Elevation Model: A Complete Workflow Using Deep Learning and Its Application. Remote Sens. 2022, 14, 621. [Google Scholar] [CrossRef]
- Fan, L.; Yuan, J.; Zha, K.; Wang, X. ELCD: Efficient Lunar Crater Detection Based on Attention Mechanisms and Multiscale Feature Fusion Networks from Digital Elevation Models. Remote Sens. 2022, 14, 5225. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, B.; Xue, H.; Li, X.; Ma, J. An Improved Global Catalog of Lunar Impact Craters (≥1 Km) With 3D Morphometric Information and Updates on Global Crater Analysis. J. Geophys. Res. Planets 2021, 126. [Google Scholar] [CrossRef]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Zuber, M.T.; Haruyama, J.; Smith, D.E. A New Lunar Digital Elevation Model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, M.; Xiao, Z.; Cui, J. The Minimum Confidence Limit for Diameters in Crater Counts. Icarus 2020, 341, 113645. [Google Scholar] [CrossRef]
- Fu, X.-H.; Qiao, L.; Zhang, J.; Ling, Z.-C.; Li, B. The Subsurface Structure and Stratigraphy of the Chang’E-4 Landing Site: Orbital Evidence from Small Craters on the Von Kármán Crater Floor. Res. Astron. Astrophys. 2020, 20, 008. [Google Scholar] [CrossRef]
- Fassett, C.I.; Beyer, R.A.; Deutsch, A.N.; Hirabayashi, M.; Leight, C.; Mahanti, P.; Nypaver, C.A.; Thomson, B.J.; Minton, D.A. Topographic Diffusion Revisited: Small Crater Lifetime on the Moon and Implications for Volatile Exploration. J. Geophys. Res. Planets 2022, 127, e2022JE007510. [Google Scholar] [CrossRef]
- Zhang, H.; Li, J.; Wang, Z.; Guan, Y. Guidance Navigation and Control for Chang’E-5 Powered Descent. Space Sci. Technol. 2021, 2021, 9823609. [Google Scholar] [CrossRef]
- Dundas, C.M.; McEwen, A.S. Rays and Secondary Craters of Tycho. Icarus 2007, 186, 31–40. [Google Scholar] [CrossRef]
- Plescia, J.B.; Robinson, M.S. Giordano Bruno: Small Crater Populations––Implications for Self-Secondary Cratering. Icarus 2019, 321, 974–993. [Google Scholar] [CrossRef]
- Xiao, Z.; Werner, S.C. Size-Frequency Distribution of Crater Populations in Equilibrium on the Moon. J. Geophys. Res. Planets 2015, 120, 2277–2292. [Google Scholar] [CrossRef]
- Minton, D.A.; Fassett, C.I.; Hirabayashi, M.; Howl, B.A.; Richardson, J.E. The Equilibrium Size-Frequency Distribution of Small Craters Reveals the Effects of Distal Ejecta on Lunar Landscape Morphology. Icarus 2019, 326, 63–87. [Google Scholar] [CrossRef]
- Fairweather, J.H.; Lagain, A.; Servis, K.; Benedix, G.K.; Kumar, S.S.; Bland, P.A. Automatic Mapping of Small Lunar Impact Craters Using LRO-NAC Images. Earth Space Sci. 2022, 9, e2021EA002177. [Google Scholar] [CrossRef]
- La Grassa, R.; Cremonese, G.; Gallo, I.; Re, C.; Martellato, E. YOLOLens: A Deep Learning Model Based on Super-Resolution to Enhance the Crater Detection of the Planetary Surfaces. Remote Sens. 2023, 15, 1171. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Di, K.; Chen, M.; Duan, J.; Kong, J.; Xie, J.; Liu, Z.; Wan, W.; Rong, Z.; et al. Localization of the Chang’e-5 Lander Using Radio-Tracking and Image-Based Methods. Remote Sens. 2021, 13, 590. [Google Scholar] [CrossRef]
- Xu, L.; Zou, Y.L.; Wu, J. Preliminary Imagines for the Planning and Its Scientific Objectives of China’s Lunar Research Station. In Proceedings of the 49th Annual Lunar and Planetary Science Conference, Houston, TX, USA, 19–23 March 2018; Volume 1856. [Google Scholar]
- Qian, Y.; Xiao, L.; Yin, S.; Zhang, M.; Zhao, S.; Pang, Y.; Wang, J.; Wang, G.; Head, J.W. The Regolith Properties of the Chang’e-5 Landing Region and the Ground Drilling Experiments Using Lunar Regolith Simulants. Icarus 2020, 337, 113508. [Google Scholar] [CrossRef]
- Hu, S.; He, H.; Ji, J.; Lin, Y.; Hui, H.; Anand, M.; Tartèse, R.; Yan, Y.; Hao, J.; Li, R.; et al. A Dry Lunar Mantle Reservoir for Young Mare Basalts of Chang’e-5. Nature 2021, 600, 49–53. [Google Scholar] [CrossRef]
- Jia, M.; Yue, Z.; Di, K.; Liu, B.; Liu, J.; Michael, G. A Catalogue of Impact Craters Larger than 200 m and Surface Age Analysis in the Chang’e-5 Landing Area. Earth Planet. Sci. Lett. 2020, 541, 116272. [Google Scholar] [CrossRef]
- Li, Q.-L.; Zhou, Q.; Liu, Y.; Xiao, Z.; Lin, Y.; Li, J.-H.; Ma, H.-X.; Tang, G.-Q.; Guo, S.; Tang, X.; et al. Two-Billion-Year-Old Volcanism on the Moon from Chang’e-5 Basalts. Nature 2021, 600, 54–58. [Google Scholar] [CrossRef]
- Wilhelms, D.E.; McCauley, J.F.; Trask, N.J. The Geologic History of the Moon. Prof. Pap. 1987, 1348. [Google Scholar] [CrossRef]
- Stoffler, D. Cratering History and Lunar Chronology. Rev. Mineral. Geochem. 2006, 60, 519–596. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 28. [Google Scholar]
- Haruyama, J.; Matsunaga, T.; Ohtake, M.; Morota, T.; Honda, C.; Yokota, Y.; Torii, M.; Ogawa, Y. LISM Working Group Global Lunar-Surface Mapping Experiment Using the Lunar Imager/Spectrometer on SELENE. Earth Planet Space 2008, 60, 243–255. [Google Scholar] [CrossRef]
- Huang, G.; Li, Y.; Pleiss, G.; Liu, Z.; Hopcroft, J.E.; Weinberger, K.Q. Snapshot Ensembles: Train 1, Get M for Free 2017. arXiv 2017, arXiv:1704.00109. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Proceedings of the Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2019; Volume 32. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Kneissl, T.; van Gasselt, S.; Neukum, G. Map-Projection-Independent Crater Size-Frequency Determination in GIS Environments—New Software Tool for ArcGIS. Planet. Space Sci. 2011, 59, 1243–1254. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. Available online: https://arxiv.org/abs/1703.06870 (accessed on 14 October 2023).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. Available online: https://openaccess.thecvf.com/content_cvpr_2016/html/He_Deep_Residual_Learning_CVPR_2016_paper.html (accessed on 14 October 2023).
- Adelson, E.; Anderson, C.; Bergen, J.; Burt, P.; Ogden, J. Pyramid Methods in Image Processing. RCA Eng. 1983, 29, 33–41. [Google Scholar]
- Neukum, G.; Ivanov, B.A.; Hartmann, W.K. Cratering Records in the Inner Solar System in Relation to the Lunar Reference System. In Chronology and Evolution of Mars; Kallenbach, R., Geiss, J., Hartmann, W.K., Eds.; Space Sciences Series of ISSI; Springer: Dordrecht, The Netherlands, 2001; Volume 12, pp. 55–86. ISBN 978-90-481-5725-9. [Google Scholar]
- Xie, M.; Xiao, Z.; Xu, L.; Fa, W.; Xu, A. Change in the Earth–Moon Impactor Population at about 3.5 Billion Years Ago. Nat. Astron. 2021, 5, 128–133. [Google Scholar] [CrossRef]
- Neukum, G. Meteorite Bombardment and Dating of Planetary Surfaces; Ludwig-Maximilians University: Munich, Germany, 1984. [Google Scholar]
- Xie, M. A New Chronology from Debiased Crater Densities: Implications for the Origin and Evolution of Lunar Impactors. Earth Planet. Sci. Lett. 2023, 602, 117963. [Google Scholar] [CrossRef]
- Qian, Y.Q.; Xiao, L.; Zhao, S.Y.; Zhao, J.N.; Huang, J.; Flahaut, J.; Martinot, M.; Head, J.W.; Hiesinger, H.; Wang, G.X. Geology and Scientific Significance of the Rümker Region in Northern Oceanus Procellarum: China’s Chang’E-5 Landing Region. J. Geophys. Res. Planets 2018, 123, 1407–1430. [Google Scholar] [CrossRef]
- Robbins, S.J.; Bierhaus, E.; Spencer, J.R.; Lauer, T.R.; Weaver, H.; Marchi, S.; Barnouin, O.S.; Russo, D.; Levison, H.F.; Martin, L. Testing the Ability for Deconvolution and Nyquist-Sampling to Allow Detection of Small Impact Craters: Lunar Proof-of-Concept with Lucy’s L’LORRI Camera. In Proceedings of the 54th Lunar and Planetary Science Conference, Houston, TX, USA, 13–17 March 2023; LPI Contrib. No. 2806. Available online: https://www.hou.usra.edu/meetings/lpsc2023/pdf/2976.pdf (accessed on 14 October 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Feature Maps (Input) | Feature Maps (Output) |
|---|---|---|
| Special Conv 1 | ||
| Max Pooling 1 | ||
| Special Conv 2 | ||
| Special Conv 3 | ||
| Special Conv 4 | ||
| Special RoI_Align | ||
| Special Conv 5 | ||
| Average Pooling |
| Diameter (m) | ||||
|---|---|---|---|---|
| 100 | ||||
| 200 | ||||
| 500 |
| Region | Longitude | Latitude | GT | DR | |||
|---|---|---|---|---|---|---|---|
| 1 | 55°W–55.5°W | 45°N–48°N | |||||
| 2 | 55.5°W–56°W | 45°N–48°N | |||||
| 3 | 56°W–56.5°W | 45°N–48°N | |||||
| 4 | 56.5°W–57°W | 45°N–48°N | |||||
| 5 | 57°W–57.5°W | 45°N–48°N | |||||
| 6 | 57.5°W–58°W | 45°N–48°N | |||||
| 7 | 58°W–58.5°W | 45°N–48°N | |||||
| 8 | 58.5°W–59°W | 45°N–48°N |
| Geological Unit | Total | Area (km2) | |||
|---|---|---|---|---|---|
| Im1 | |||||
| Im2 | |||||
| Em3 | |||||
| Em4 |
| Region | Diameter (m) | GT | DR | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 3321 | 4049 | 3024 | 297 | 1035 | ||||
| 2 | 100 | 3218 | 3848 | 2928 | 290 | 920 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Lai, J.; Xie, M.; Zhao, J.; Zou, C.; Liu, C.; Qian, Y.; Deng, J. Identification of Lunar Craters in the Chang’e-5 Landing Region Based on Kaguya TC Morning Map. Remote Sens. 2024, 16, 344. https://doi.org/10.3390/rs16020344
Liu Y, Lai J, Xie M, Zhao J, Zou C, Liu C, Qian Y, Deng J. Identification of Lunar Craters in the Chang’e-5 Landing Region Based on Kaguya TC Morning Map. Remote Sensing. 2024; 16(2):344. https://doi.org/10.3390/rs16020344
Chicago/Turabian StyleLiu, Yanshuang, Jialong Lai, Minggang Xie, Jiannan Zhao, Chen Zou, Chaofei Liu, Yiqing Qian, and Jiahao Deng. 2024. "Identification of Lunar Craters in the Chang’e-5 Landing Region Based on Kaguya TC Morning Map" Remote Sensing 16, no. 2: 344. https://doi.org/10.3390/rs16020344
APA StyleLiu, Y., Lai, J., Xie, M., Zhao, J., Zou, C., Liu, C., Qian, Y., & Deng, J. (2024). Identification of Lunar Craters in the Chang’e-5 Landing Region Based on Kaguya TC Morning Map. Remote Sensing, 16(2), 344. https://doi.org/10.3390/rs16020344