1. Introduction
Subsea cables are the main carrier for integrating energy into the onshore grid [
1]. However, these cables face potential risks of damage from both natural factors and human activities. Human activities are the primary cause of cable faults, such as fishing and anchoring [
2,
3]. Matrix-type subsea power cable protectors assembled with reinforced concrete blocks have been tested to protect cables from anchoring [
4]. Cables can also be damaged by natural causes, including ocean currents [
5] and earthquakes [
6,
7]. When a cable is damaged, it is necessary to locate the fault as soon as possible to reduce economic losses [
8]. Detailed subsea cable route maps serve as valuable references for locating cable faults, enabling significant time savings. Consequently, the detection of subsea cables has become a top priority, especially cable route tracking.
The methods of subsea cable detection mainly include acoustics, optics, electricity, and magnetism. Probe devices are usually integrated into AUVs or ROVs [
9,
10]. Sonar is the main equipment used for acoustic detection. High-resolution sonar instruments, such as multibeam sonar [
10], synthetic aperture sonar [
11], and side-scan sonar [
12], are needed for subsea cable-like object detection. In order to widen the frequency band, biosonar is used for cable detection [
13]. Acoustic detection is mainly used for cables that are exposed to the seabed or buried shallowly in the seabed [
14]. Vision technology can provide real-time observation for optical detection. In order to solve the problem wherein vision technology has no effect in a turbid sea environment, some methods, including those integrating image enhancement [
15], image segmentation [
16], and particle filters [
17], have been proposed. In addition, the high-precision recognition of curved cables has been realized by means of edge detection [
18,
19] and the random sample consensus (RANSAC) algorithm [
19]. Acoustic and optical methods are only applicable for detecting subsea cables that are exposed on the seabed or shallowly buried. When the cables are deeply buried beneath the seabed, both methods become ineffective. Electrical methods are mainly used in cable fault detection. Time–frequency domain reflectometry is a traditional method [
20]. To solve the difficulty of high-impedance fault location, a deep learning algorithm [
21] and a novel method by analyzing the variation difference in the equivalent current in the Laplace transform domain [
22] have been proposed. When using electrical methods to locate the fault points of the subsea cables, precise cable route information is essential. Otherwise, it is challenging to accurately locate the positions of the fault points.
Magnetic detection is a popular method because cables do not need to be seen visually. Vector magnetic field sensors, including fluxgate [
23,
24] and multi-probe [
25], are usually applied to cable detection. There are some commercial devices, such as the TSS 350 and MAG-032C. The disadvantage of these magnetic field sensors is that the detection results are affected by the determination of the magnetometer bias vector, scale factors, and non-orthogonality corrections [
26]. To correct these errors, some calibration methods have been proposed, but changes in magnetic fields cannot be completely corrected. Figure 10 of Ref. [
26] shows that, after interference component suppression, the respective magnetic field measurement errors in each direction under the background geomagnetic field are 163.07 nT (2.1%), 328.1 nT (4.28%), and 205.1 nT (2.53%). Ref. [
27] used attitude information to calibrate vector magnetic field sensors and achieved a simulation error of several nT and a measurement error less than 30 nT under the background geomagnetic field. And these methods need algorithms to weaken the influence of the sensor attitude; thus, computational requirements are increased, which affects real-time performance. In refs. [
23,
24], the authors achieved very good results in automatic cable tracking with accuracies of <2.5 m and <1 m, shown in their plots. These papers share a common analytical method, which is to conduct analysis under the condition of ignoring the changes in platform attitude. In the first paragraph of Section II. B of Ref. [
23], a theoretical model was proposed with the assumption that the roll and pitch motions of the autonomous underwater vehicles (AUV) are ignored. Similarly, in the first paragraph of Section IV of Ref. [
24], the assumption was made that the AUV does not pitch or roll. On the ocean surface, the attitude of an AUV or remotely operated vehicle (ROV) is constantly changing, especially in high sea conditions. This causes significant measurement errors for the vector magnetometer, thereby affecting the positioning accuracy of the subsea cables.
The self-oscillating optically pumped magnetometer (OPM) is a high-sensitivity quantum scalar sensor that is widely used in aeromagnetic survey, marine monitoring, geological exploration, earthquake prediction, medical and health systems, and other fields. The optical properties of the OPM contribute to maintaining measurement accuracy with only a weak influence from the attitude of the magnetometer. This paper explores the utility of the OPM for cable positioning in high sea conditions, employing a scalar magnetic field checking method. In contrast, the proton magnetometer, despite being a scalar sensor, exhibits a response too slow to detect the 50 Hz signal. To achieve real-time tracking of subsea cables in challenging high sea conditions, the self-oscillating OPM becomes indispensable. This paper demonstrates that the measurement of the magnetic field Bc generated by the current in a cable remains immune to platform attitude influences. This is achieved by extracting the Bc component along the geomagnetic field using a high-bandwidth self-oscillating optically pumped magnetometer. In a laboratory experiment, the magnetometer tracks the cable at various postures to validate the attitude-independent performance of the OPM. In a sea experiment, this paper reports the discovery of fifty-one points of subsea cables and the successful tracking of nine cable routes.
2. Attitude Independence for a Self-Oscillation OPM
OPMs are mainly applied for weak magnetic field detection. They are scalar sensors using the quantum effect wherein the motion state of alkali metal atoms can be affected by laser fields and magnetic fields [
28]. The properties of the OPM are as follows: the magnetic field resolution is 3 pT, the dynamic range is 15,000 to 105,000 nT [
29], and the bandwidth is limited by the frequency counter, which has a sampling rate of 250 Hz. The self-oscillation OPM offers distinct and substantial benefits in the measurement of magnetic fields due to the principles of both optical pumping and self-oscillation. These advantages can be found on pages VIII to XI of Ref. [
29]. Due to the properties of the self-oscillation OPM, the measurement accuracy is only weakly influenced by the attitude of the magnetometer. In addition, real-time performance is also necessary for detecting subsea cables. The response of the self-oscillation OPM is extremely fast, such that the signal of the 50 Hz magnetic field can be detected without any appreciable lag in response.
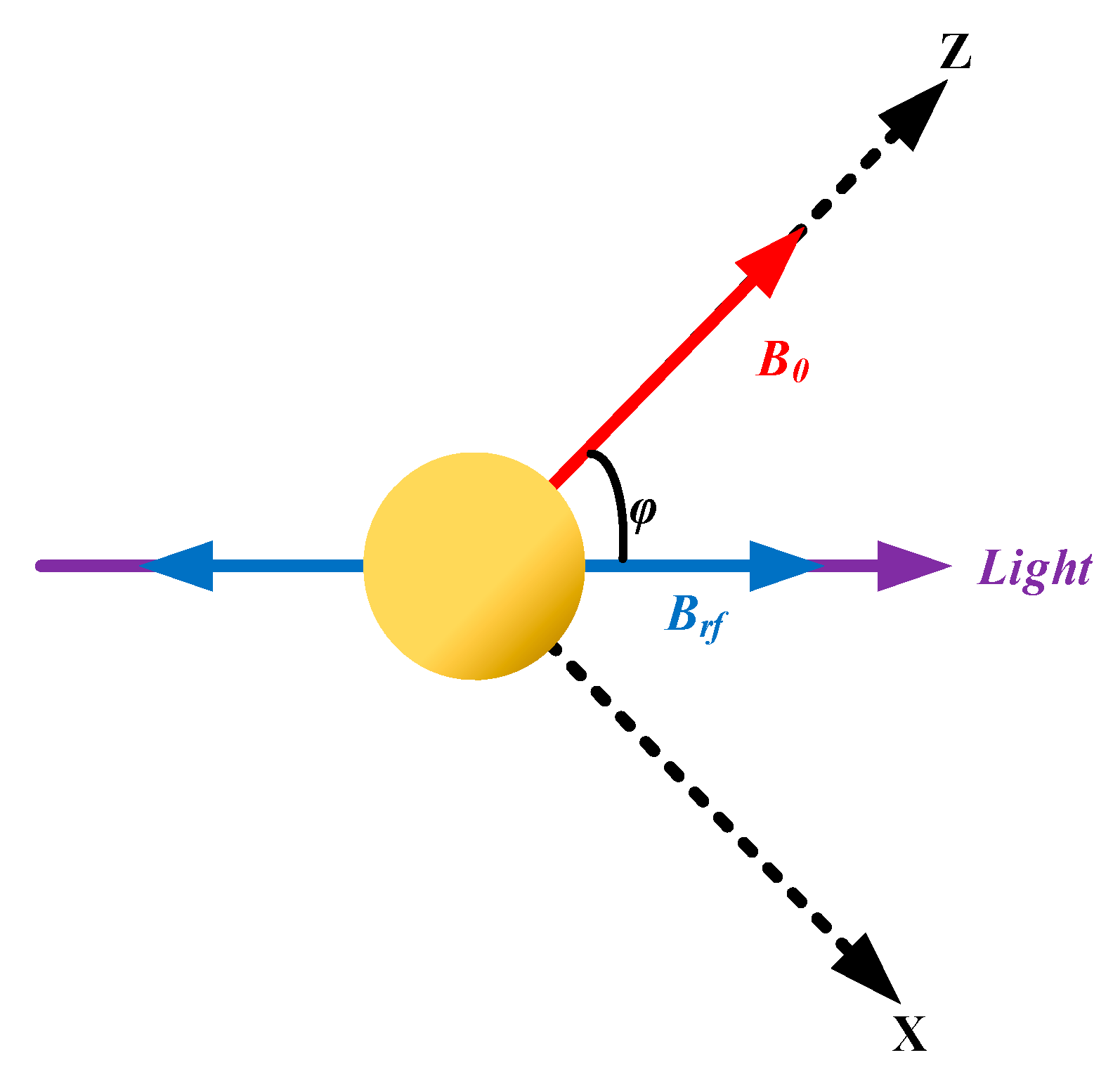
To analyze the influence of the angle
φ between the magnetic field
B0 to be measured and the direction of light propagation, the OPM model geometry is established as shown in
Figure 1. An optically pumped atomic magnetometer consists of three main processes: state preparation, magnetic field–atom interaction, and optical detection [
30]. In the process of state preparation, the depopulation process of the pump lamp and the repopulation process of spontaneous emission cause the atoms in ground state to establish orientation polarization [
30]. In the processes of magnetic field–atom interaction, the magnetic field
B0 causes the magnetic sublevels to produce linear Zeeman splitting, which generates the Larmor precession frequency. The weak-radiofrequency magnetic field
is parallel to the propagation direction of light. When the frequency of
Brf is equal to the Larmor precession frequency, the magnetic resonance phenomenon occurs, and the oriented polarization established during the processes of quantum state preparation is changed. In the processes of optical detection, the probe light detects the change in polarization due to the magnetic resonance.
According to the analysis of the OPM, the Hamiltonian of the system is denoted
where the detuning
and Rabi frequency
are
and
, respectively. The physical constants
and
are the Bohr magneton and the Landé factor. The operator
is the angular momentum operator in the covariant spherical harmonic representation [
31]. The dynamic evolution of the system satisfies the main equation
, where
is the density matrix of the system and
is the relaxation of the system [
32]. Next, the density matrix
is expanded into
using the irreducible tensor
, where
is the k-order atomic multipole moment. Then, the signal of the OPM is obtained as
where
and
. The parameters
and
are the relaxation and injection process of the system, respectively. The constant
is related to parameters of the system such as the gain factor, transconductance amplification factor, and optical power [
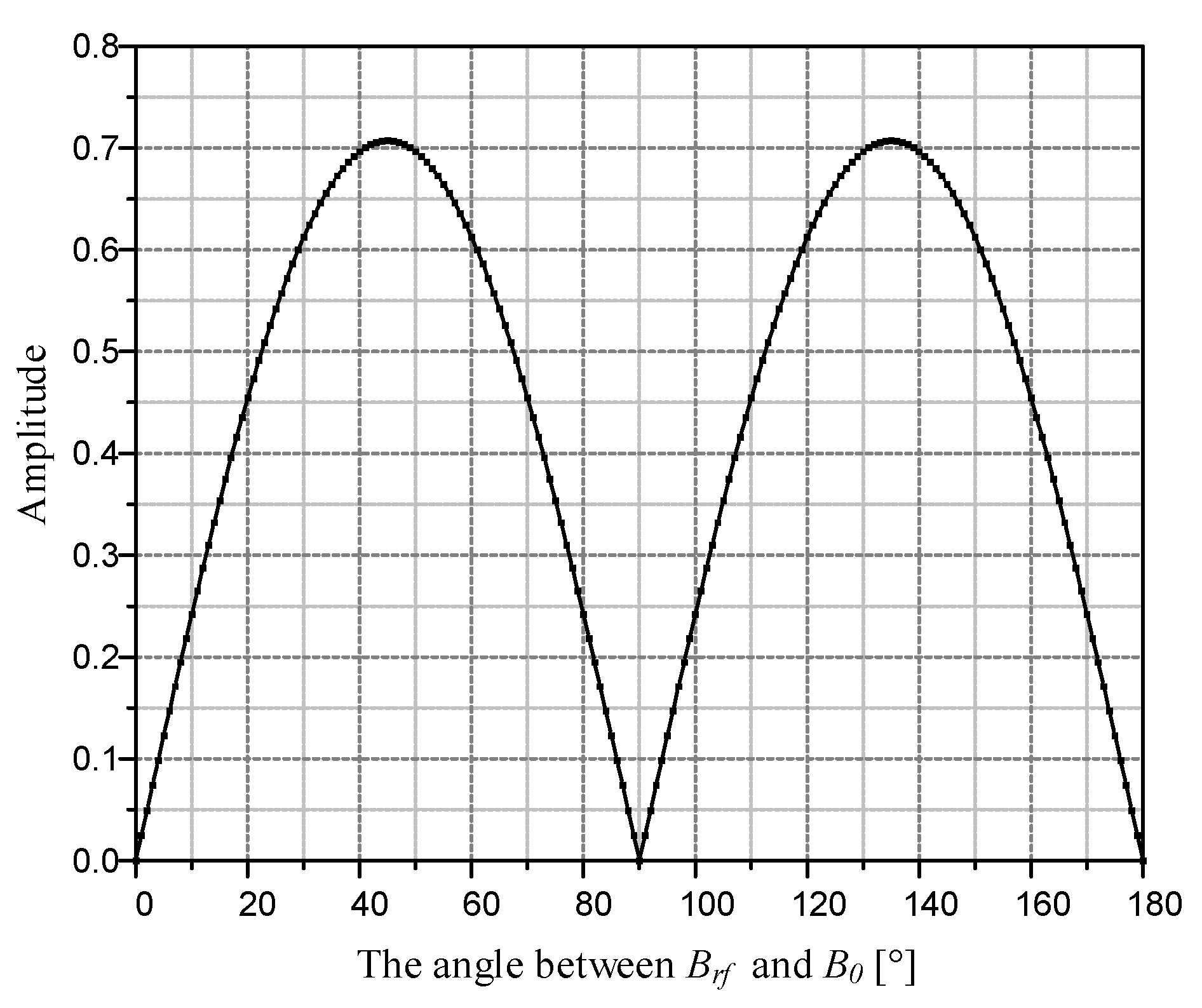
33]. The relationship between the signal amplitude of the OPM and the angle is shown in
Figure 2, where the maximum SNR can be obtained at the angle of 45°. When an OPM is used for subsea cable detection, the equipment should be installed at a 45° angle to the geomagnetic field. According to stability standards established by the International Maritime Organization (IMO), the maximum swing angle of the ship should generally be less than 20° so that the amplitude of the signal is large enough to be collected.
Through theoretical analysis, the self-oscillation OPM has real-time attitude-independent properties. When the OPM is used for subsea cables under the geomagnetic field, since it is a scalar sensor, the component of Bc along the geomagnetic field will be detected, which will be used to locate subsea cables. The real-time attitude-independent properties of the OPM allow this method to be used in high sea conditions.
3. Positioning Method with the OPM for Subsea Cables
As the OPM functions as a scalar sensor, the analysis of the subsea power cable positioning method primarily involves extracting the component of Bc along the geomagnetic field. This approach enables the scalar magnetometer to discern the cable’s direction, angle, distance, and other relevant information. The real-time attitude-independent properties of the OPM contribute to obtaining this information with greater precision. The conventional technique for cable positioning often involves identifying peak or valley values in the magnetic field signal. In this paper, the approach of identifying the valley value is adopted.
According to the Biot–Savart law, the magnetic field
B of a long straight cable can be calculated by
where the constant
μ0 is the vacuum permeability value of 4π
10
−7 H/m,
I is the current carried in the cable, and
d is the distance between the calculation point and the cable. The geomagnetic field and the magnetic field of the cable can be added together by the law of cosines. The equation is given by
where
Bg is the geomagnetic field,
Bc is the magnetic field of the cable, and
θ is the angle between both of them. Equation (4) can be converted to
Equation (5) can be expressed with
transformed to the variable x and then expanded as a Taylor series around x = 0, which is given by
Since
Bg is about 50,000 nT and
Bc is about a few hundred nT, the higher-order terms of
can be neglected. The formula can be simplified to Equation (7) [
30].
The conclusion indicates that the magnetic field of the cable, measured through scalar checking, is approximately equal to the component of the cable’s magnetic field along the geomagnetic field.
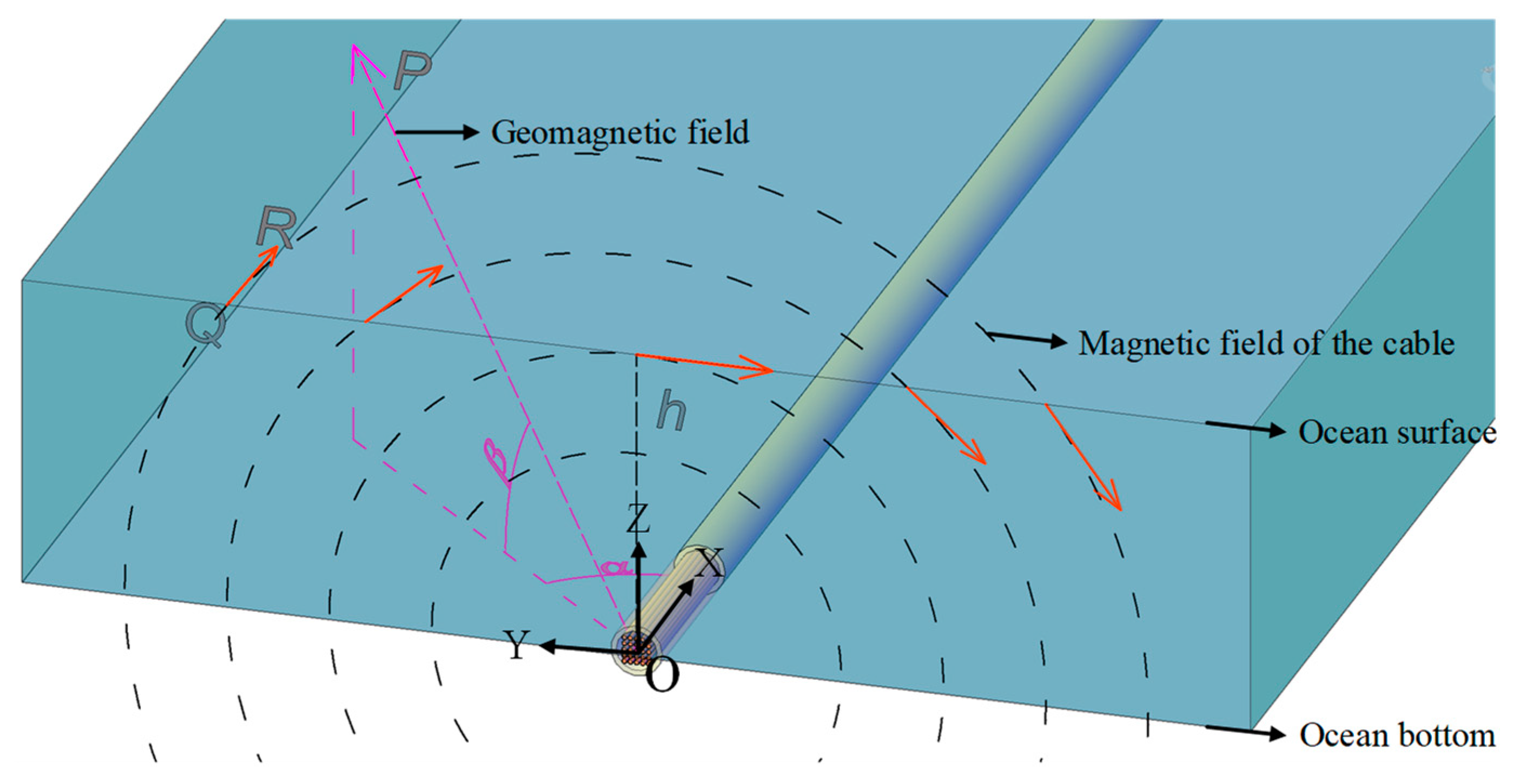
In order to analyze the component, a magnetic field model of the subsea power cable under the background geomagnetic field was established, as shown in
Figure 3. In the model, the parameter
α is the angle between the subsea power cable and the projection of the geomagnetic field on the sea level. The parameter
h is the height between the subsea power cable and the sea level. The parameter
β is the magnetic dip. The vector
is the unit geomagnetic vector. The point
Q is a detection point. The vector
is the magnetic field vector of the point
Q.
A Cartesian coordinate system was established with the cable as the
x-axis. The coordinates of
Q were set to (0,
y,
h) and those of
R were set to (0,
y +
a,
z). The magnetic field
Bc of
Q is given by
The angle
θ between the vectors
and
is given by
Finally, the component of
Bc along the geomagnetic field can be calculated by
From Equation (10), there is a least value of 0 nT when
By calculating the first derivative of Equation (10), there are two peak values,
B1 and
B2, when
By Equations (11)–(13), the distance between
y0 and
y1 is equal to the distance between
y0 and
y2, which is shown as
Additionally, the ratio of the magnetic field
B1 at
y1 to the magnetic field
B2 at
y2 is equal to the ratio of
y2 to
y1, which is shown as
During the experiment,
d can be measured using positioning equipment,
p can be measured using the OPM, and
β can be obtained by searching available information. By Equations (14) and (15),
h and sin
α can be derived as
In our experimental area, it was found that the magnetic dip is 45 degrees and
I0 is a constant. Consequently, the magnetic field is related to
h and
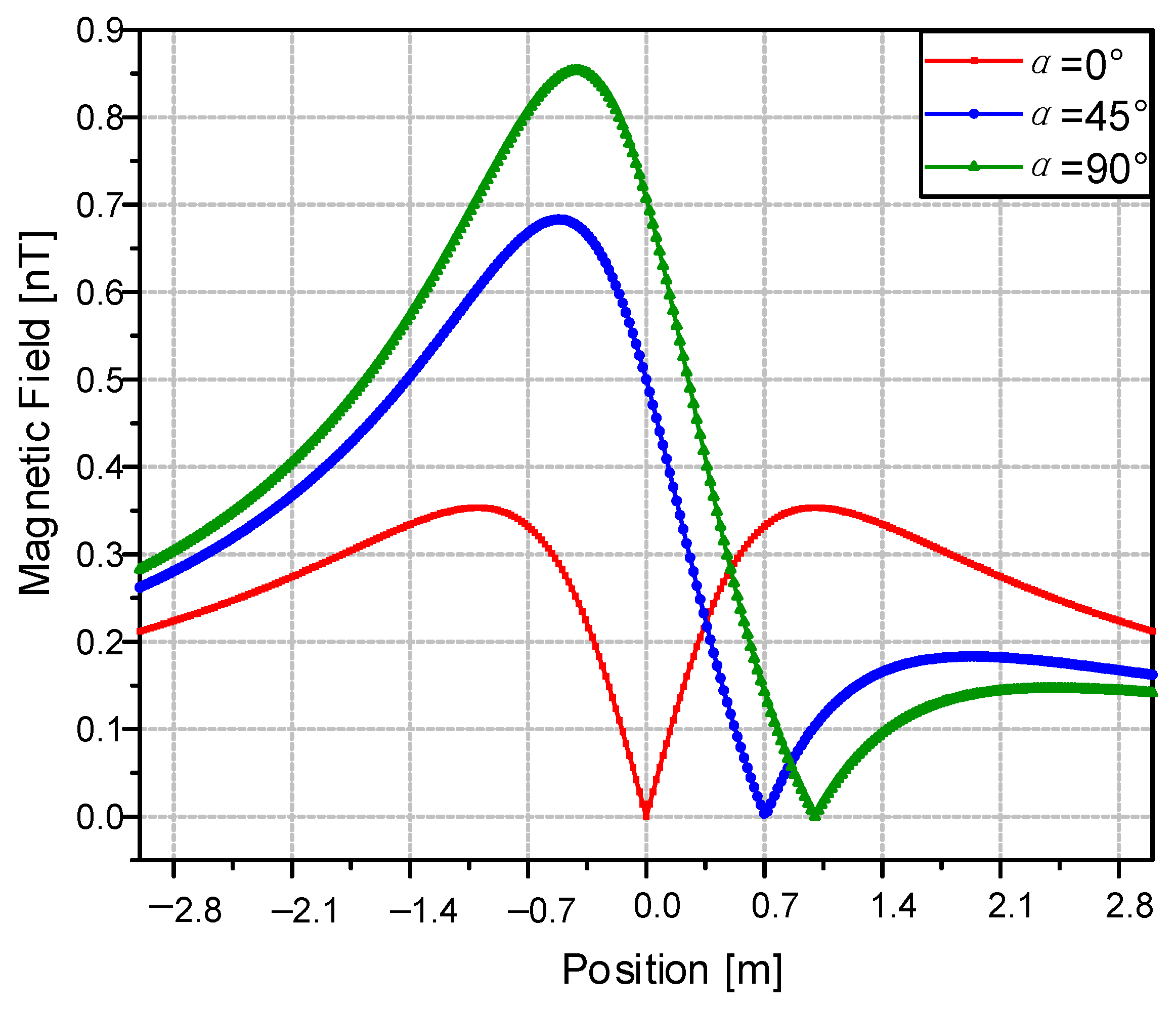
α. Subsequently, we conducted a re-analysis to understand the influence of these two parameters on the calculation results. To demonstrate the impact of parameter
α on the calculations, the value of
was set to 2π. In
Figure 4, the graphical representation illustrates the effect of α on the magnetic field of the cable. As
α increases, the position of the least value shifts. The valley value positions are noted at 0 m, 0.707 m, and 1 m. The offset distance can be calculated by Equation (11). When
h increases, the value of
d becomes larger, but the shape of the magnetic field curve does not change.
Hence, by utilizing GPS devices for location information and employing the OPM to capture the magnetic field of the subsea cable, it becomes feasible to gather data encompassing the cable’s position, depth, and orientation.
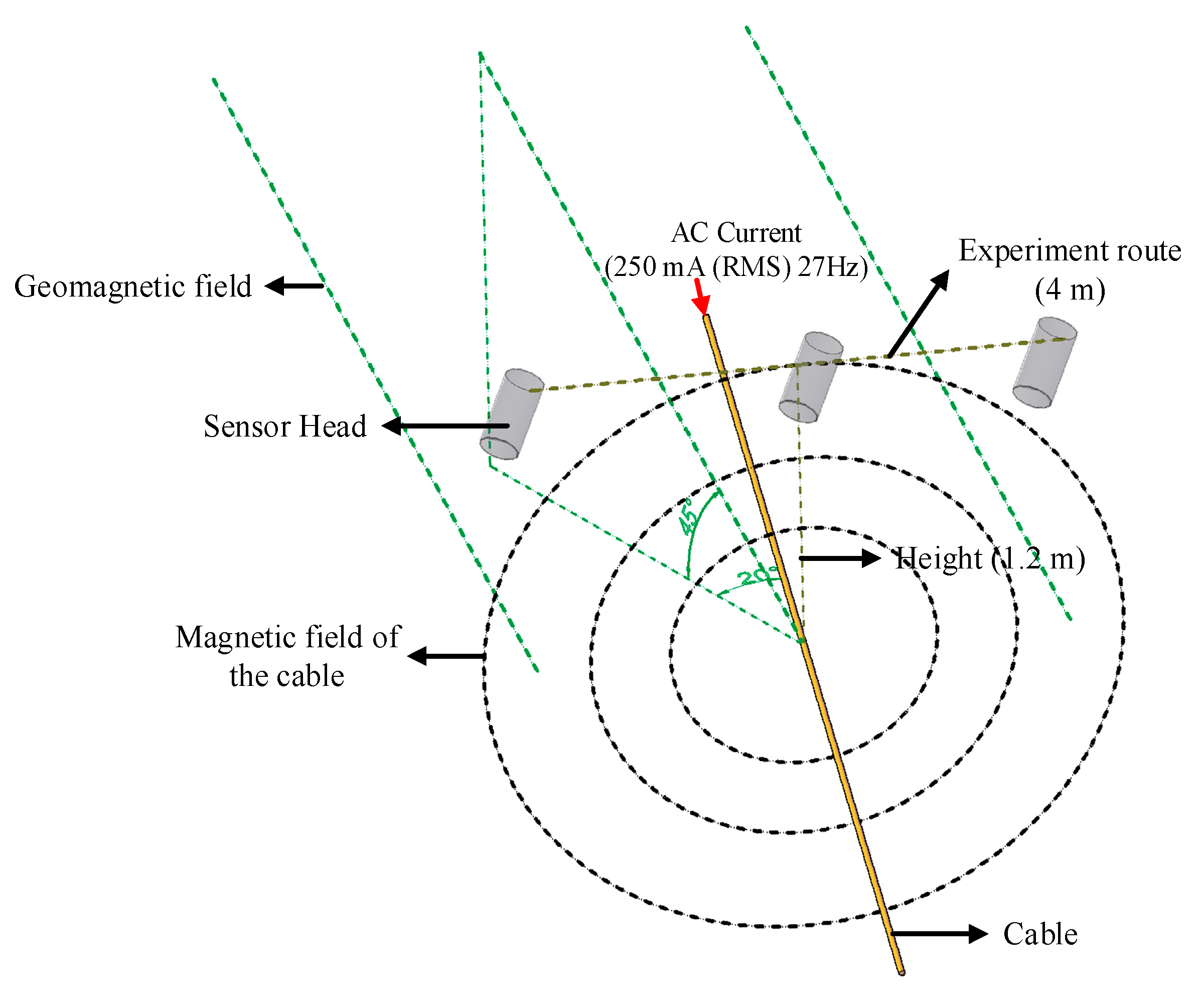
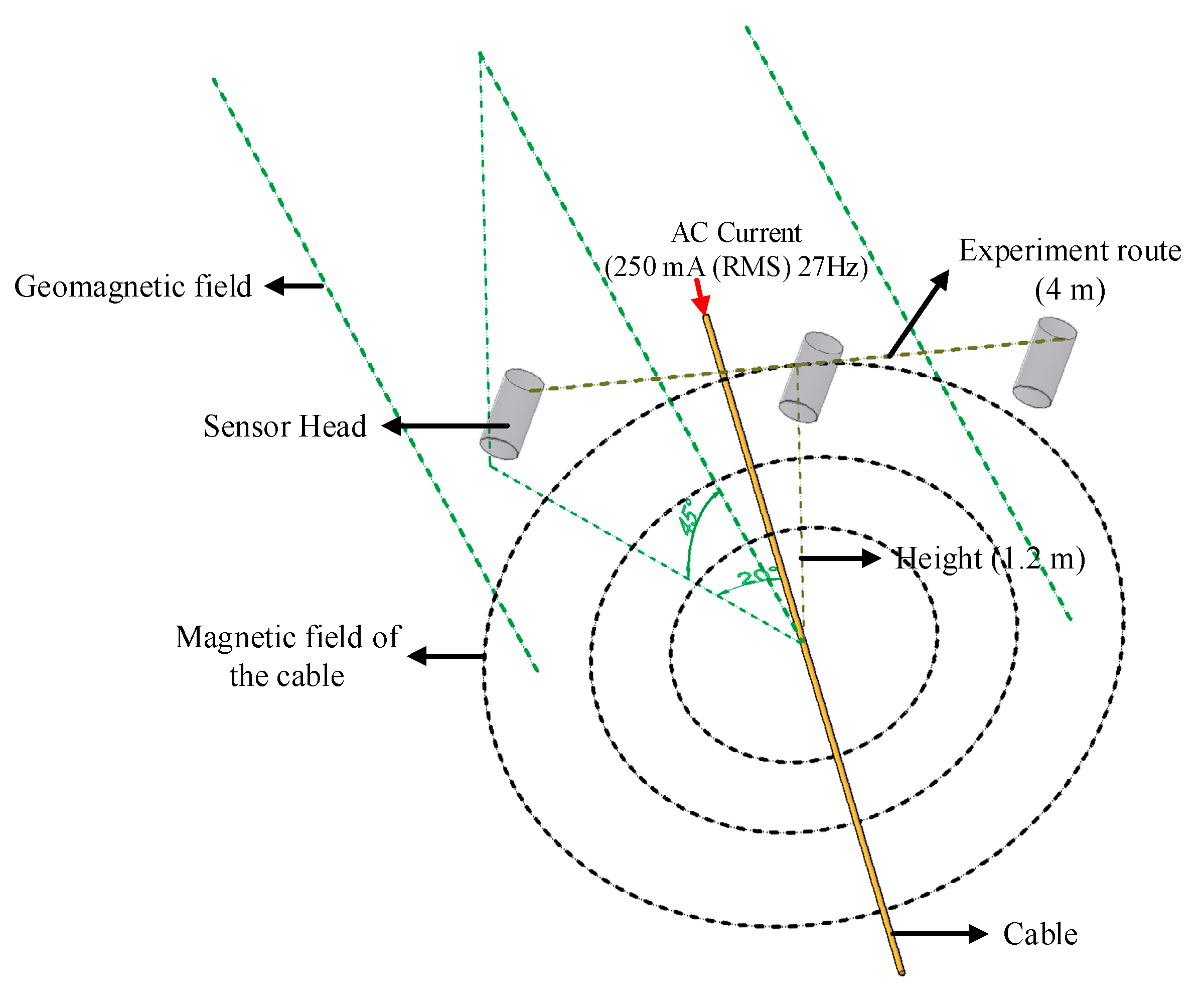
The aforementioned concept introduces a theoretical framework for subsea cable positioning utilizing scalar magnetic field checking. To verify the attitude-independent feature of the OPM within this positioning approach, a series of experiments were conducted, including both indoor and simulation experiments.
5. Sea Experiment and Results Discussion
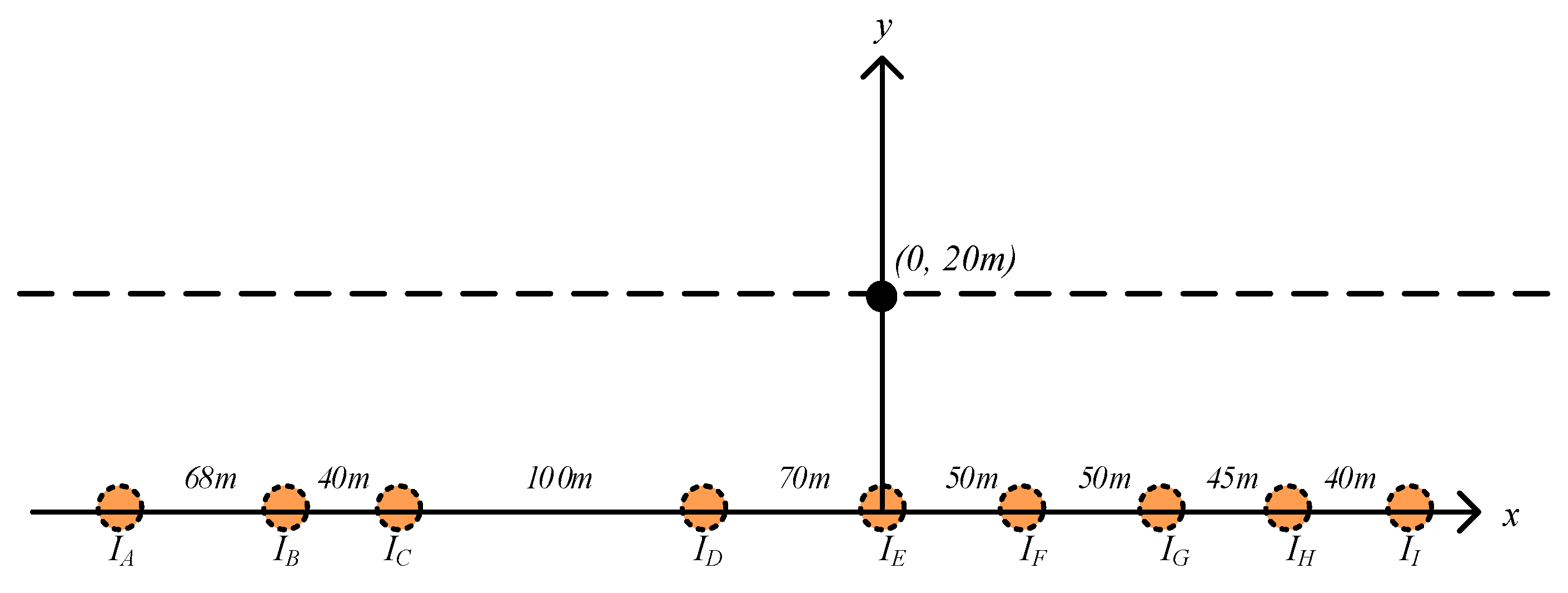
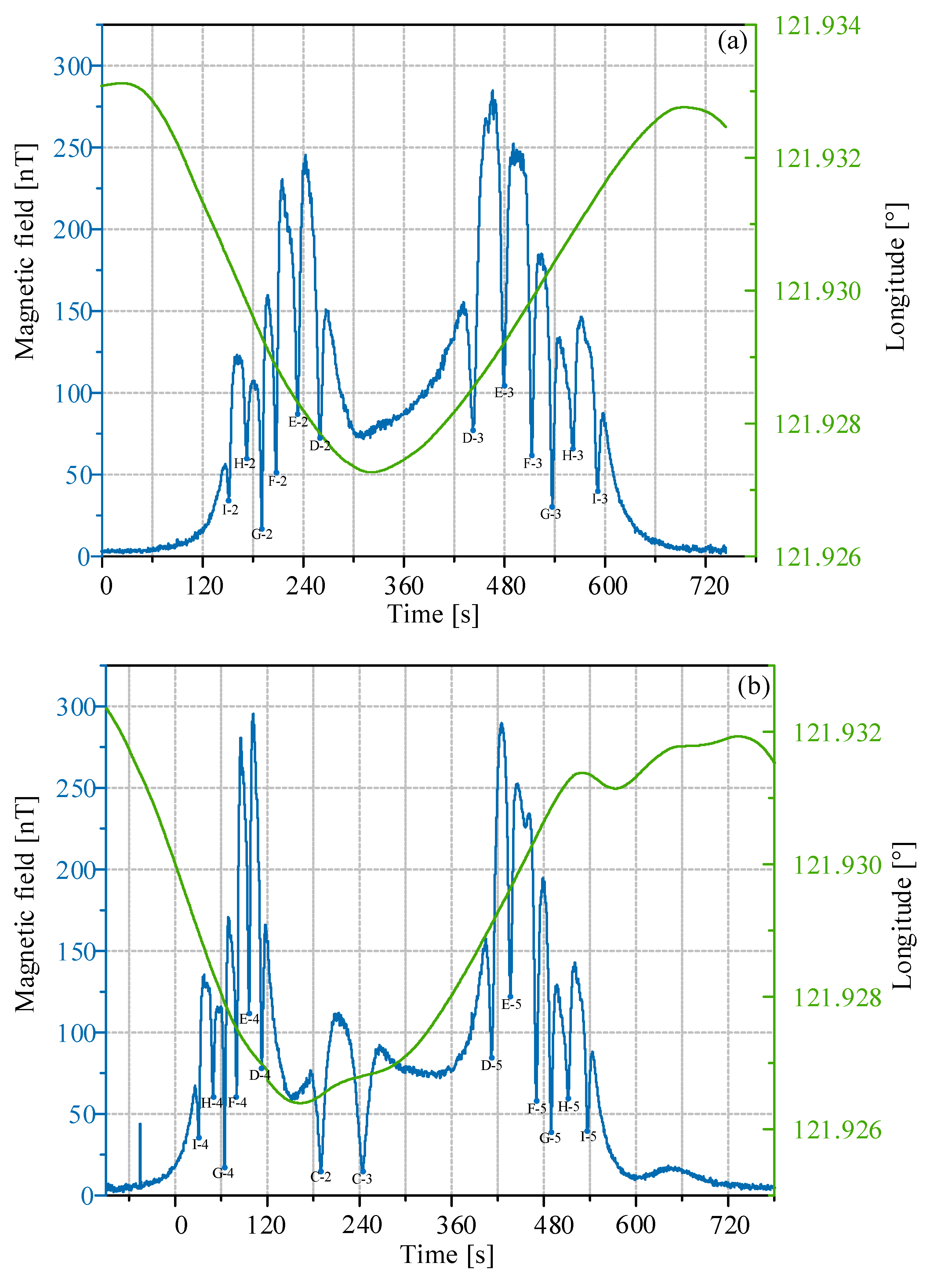
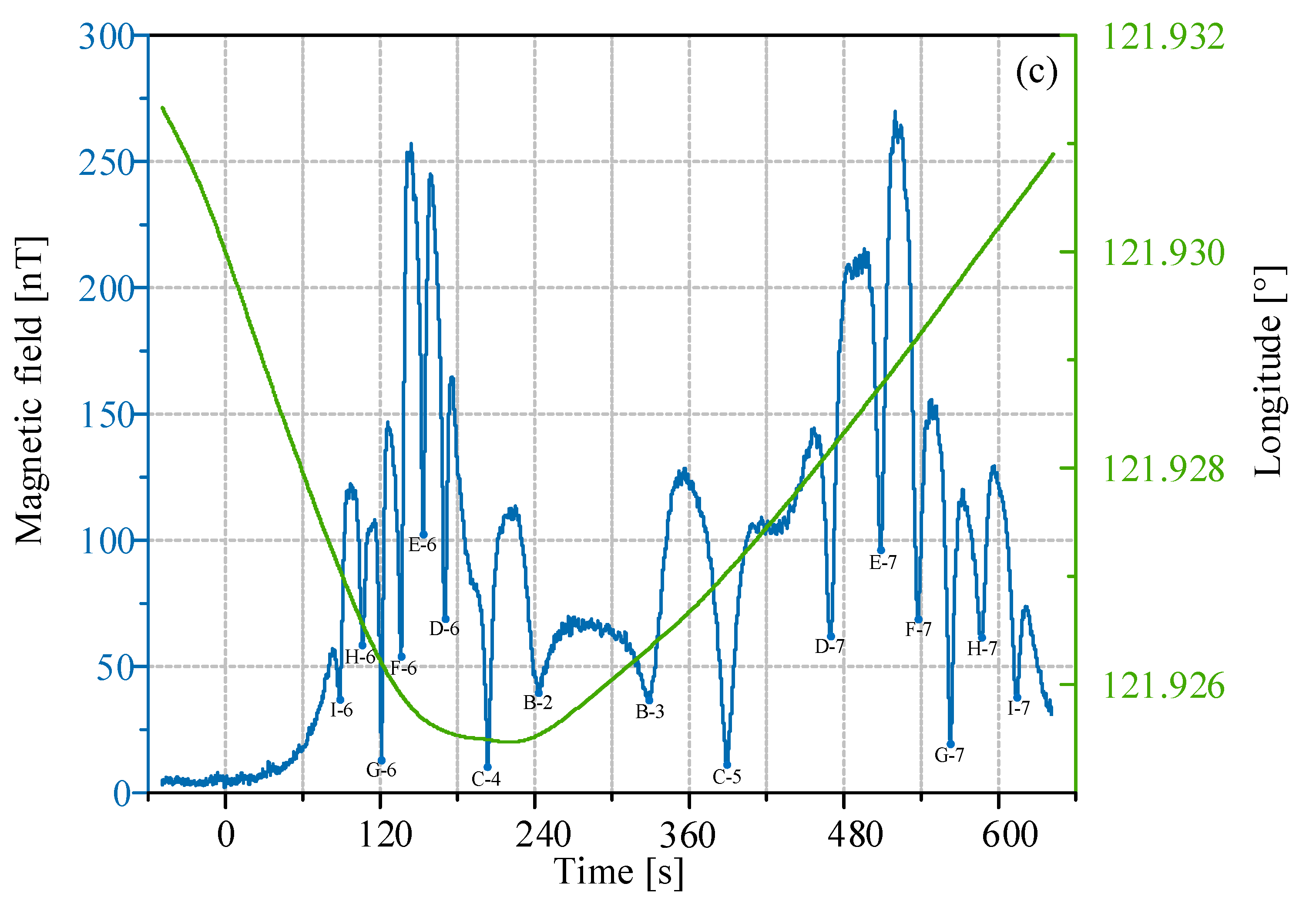
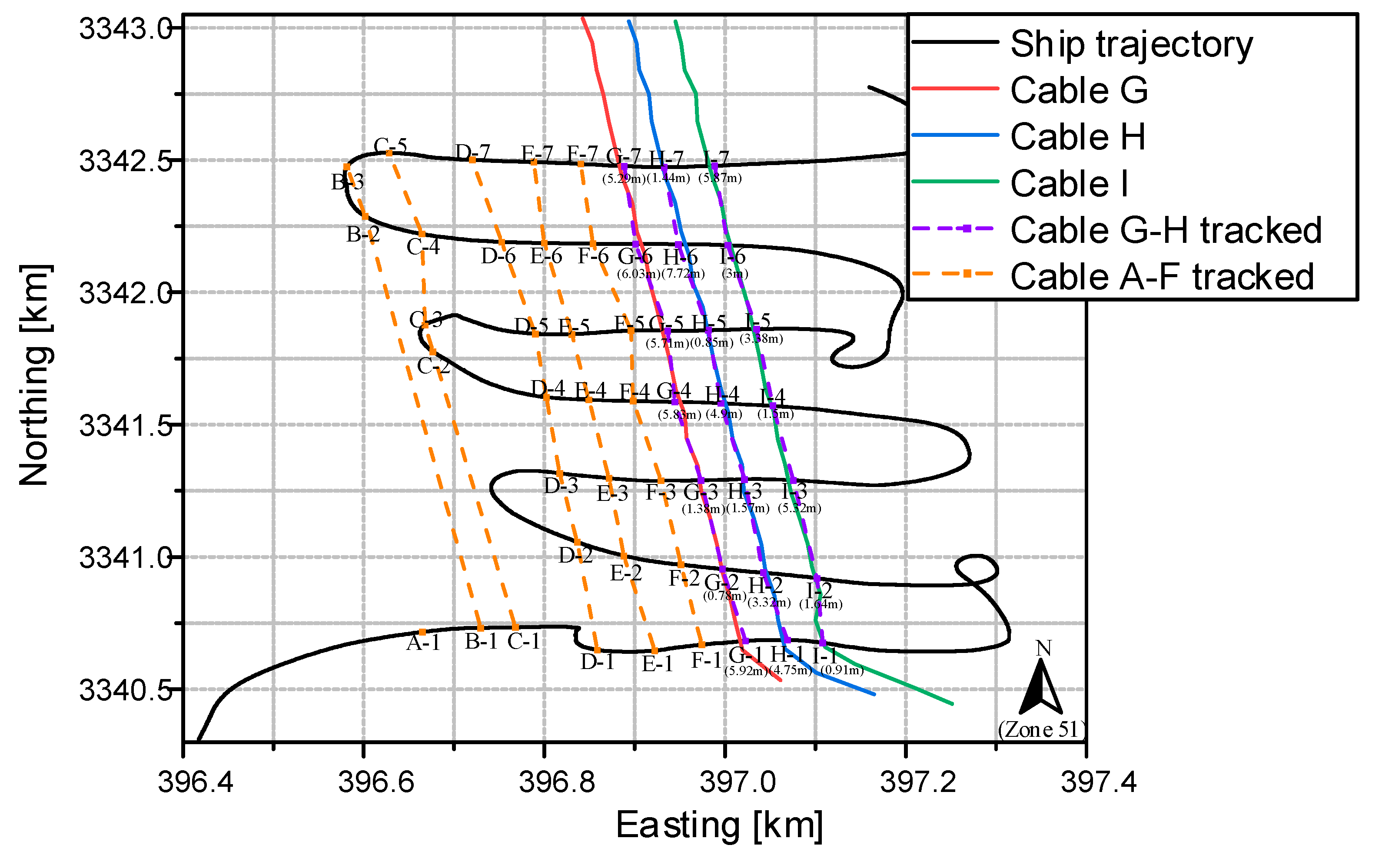
To validate the viability of subsea cable route tracking, a sea experiment was conducted. An optically pumped magnetometer was positioned 2 m from the bow of the vessel, as illustrated in
Figure 12. The magnetic dip was approximately 45 degrees. According to the map, the experimental region hosted nine subsea power cables, oriented in a north–south direction. These cables, marked from A to I, were situated at an approximate depth of 20 m. The primary objective of this experiment was to detect cables G to I. To achieve this, the ship maneuvered around these three cables, while the status of the remaining six cables regarding possible crossings remained uncertain. Throughout this operation, the area was traversed approximately 7 times in an east–west direction, encompassing a duration of about 1 h. The length of the cables under detection spanned roughly 2 km.
Given the north–south orientation of the subsea cables, the vessel traversed east–west to cross them. During this voyage, there was a substantial variation in longitude, while latitude changes remained minor. As a result,
Figure 10 and
Figure 13 exclusively showcase the correlation between navigational longitude data and the magnetic field curve. The magnetic field is an AC signal due to the 50 Hz current carried in the cable, and the amplitude of the magnetic field curve was plotted.
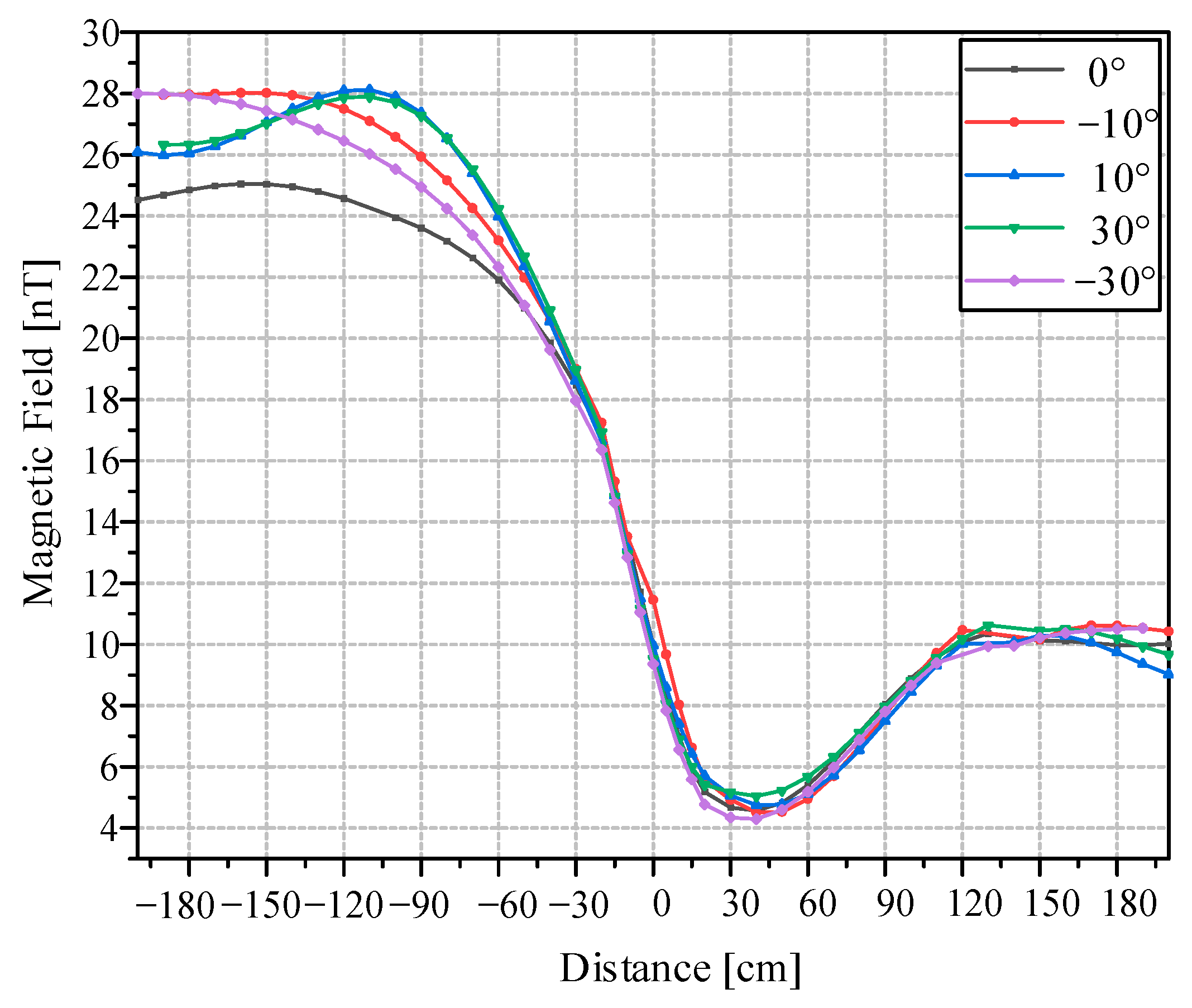
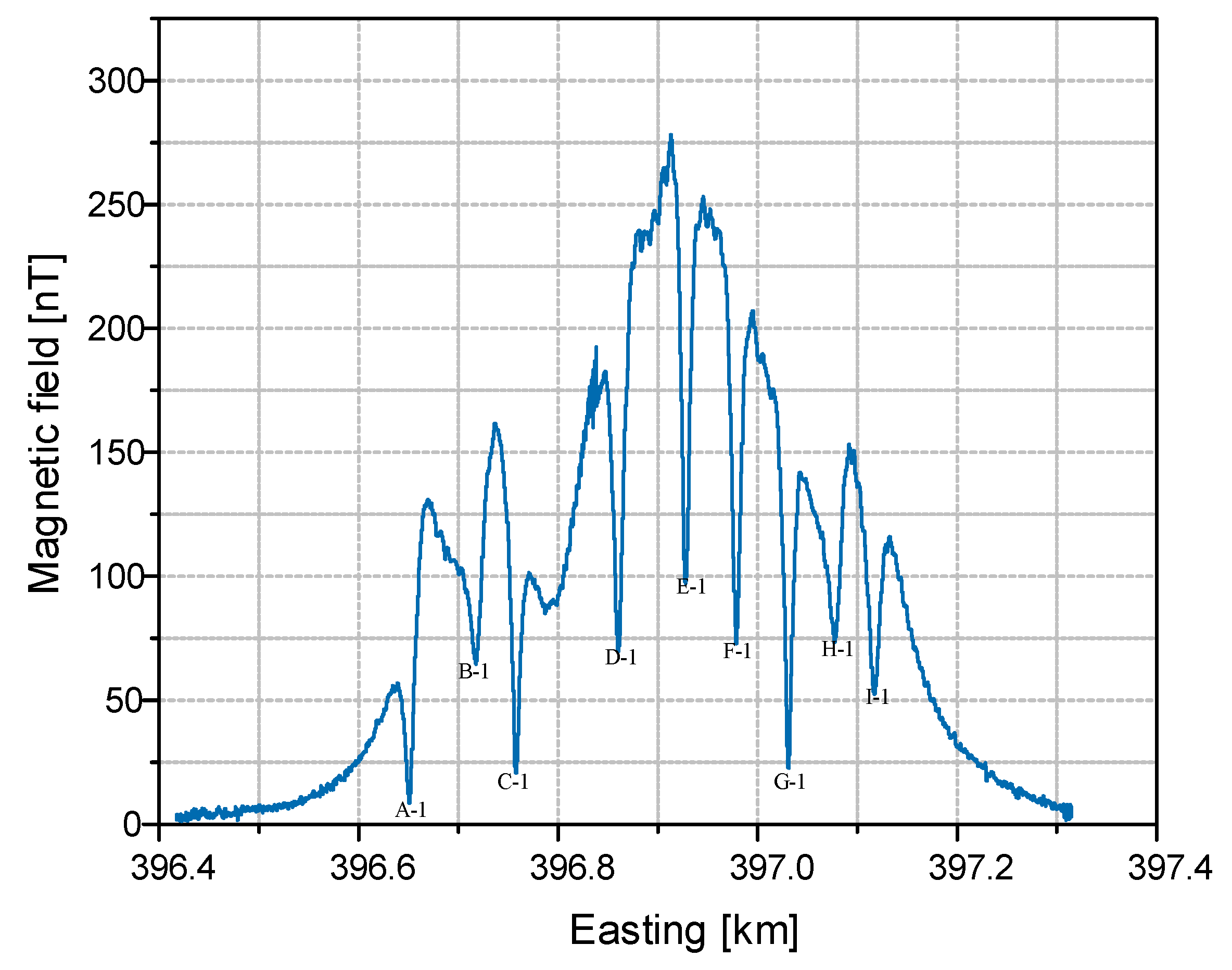
There were a total of four sets of subsea cable magnetic field data available for analysis. The first set of them is shown in
Figure 10. The nine subsea power cables could be tracked, and nine points were located, which can be found in
Figure 14. Notably, a strong alignment was observed between this magnetic field data set and the simulation results depicted in
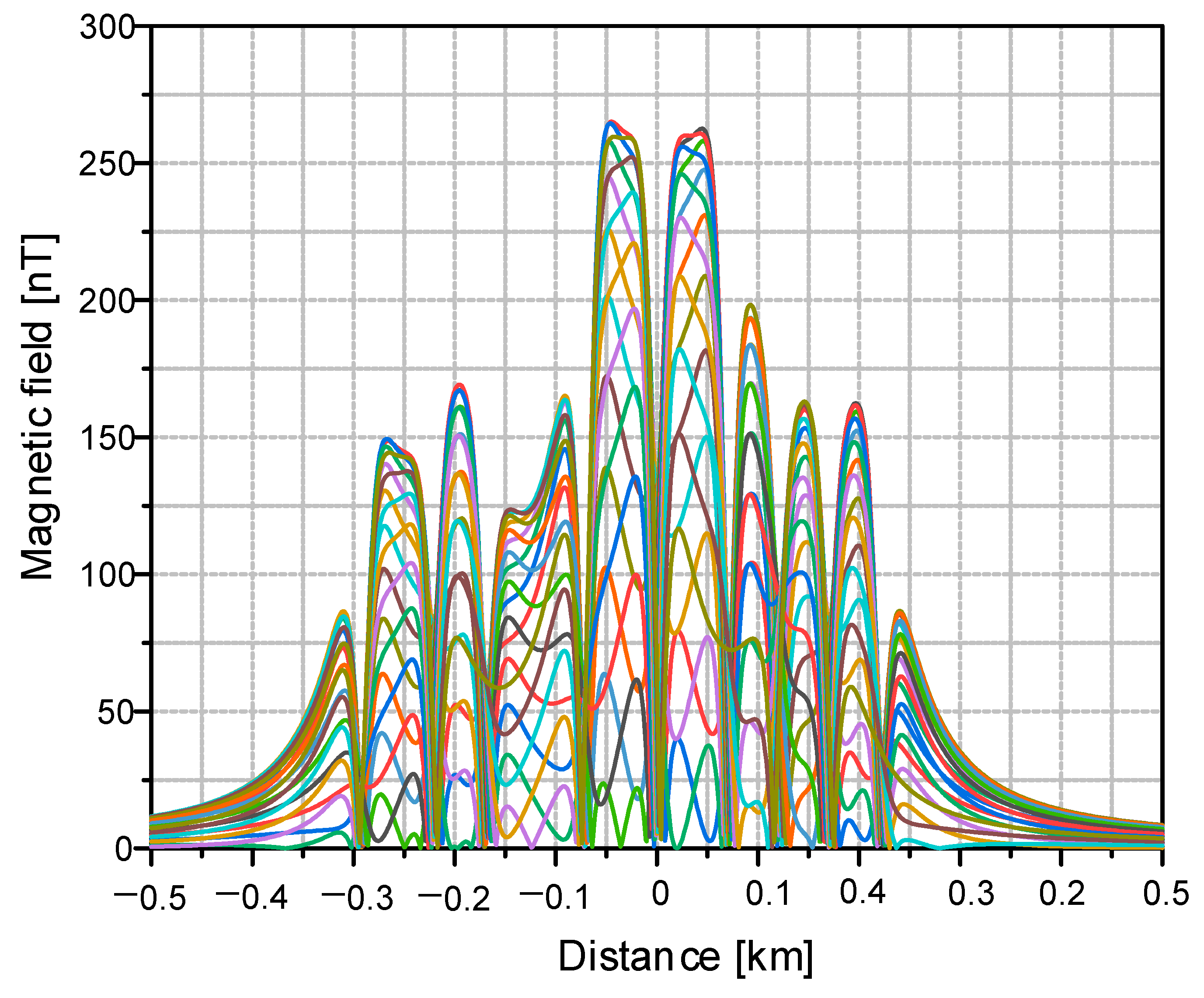
Figure 9. The presence of two peaks situated between cable D and cable F, with maximum magnetic field values, is especially prominent. Furthermore, the non-monotonic magnetic field variation between cable C and cable D is attributed to the greater distance between them. According to the results of the simulation and experiment, the magnetic field of one cable is affected by other cables, but the positioning of the cable based on the valley value of the magnetic field is not affected.
The second set of subsea cable magnetic field data is presented in
Figure 13a. Notably, the entire curve demonstrates symmetry. This symmetry indicates that the ship crossed cables D to I twice, resulting in the localization of two points on each of these cables. Similarly, the other three sets of subsea cable magnetic field data successfully led to the localization of 42 points of subsea power cables. The precise positions of each of these points are identified in
Figure 14.
By conducting experiments in the ocean, 51 points of subsea power cables were located. The purpose of this experiment was to detect cables G–I. The original laying GPS data of cables G–I were known, but not those for other cables. The located points and the actual paths of the cables are shown in
Figure 14. Only one point was located on cable A. The routes of cables B–I were all tracked successfully. Since the original laying GPS data of only three cables were known, we analyzed the positioning errors of these three cables. The maximum positioning error was 7.72 m at the H-6 position, and the minimum positioning error was 0.78 m at the G-2 position. This error may be caused by the fact that cables were not laid in the designated locations and their positions will have changed due to ocean currents over time. In conclusion, this series of experiments underscores the feasibility of route tracking for subsea power cables. While challenges like positional variability exist, the successful localization of multiple points along these cables showcases the potential and promise of this approach.
6. Conclusions
In this paper, an attitude-independent route tracking method with a self-oscillation OPM for subsea power cables, which is achieved by using scalar checking, was proposed. The excellent performance of the OPM enables the possibility of subsea cable positioning in high sea conditions. Additionally, the response of the OPM is extremely fast, so the signal of the power frequency magnetic field can be detected without any appreciable lag in response, achieving real-time capability.
Through theoretical analysis, the attitude-independent performance of the OPM and the subsea cable positioning method using scalar checking were explained in detail. Subsequently, a laboratory experiment was undertaken to validate the attitude-independent performance of the OPM. To further support the sea experiment, a simulation was conducted to acquire magnetic field distribution data concerning multiple cables.
In conclusion, the result of the sea experiment confirmed the feasibility of route tracking based on the OPM using scalar checking. Remarkably, the result matched the simulation perfectly, affirming the robustness of the proposed method. Leveraging the advantages of the OPM, this approach proves highly adaptable even in challenging high sea conditions. This paper provides clear insights into the crucial role of the OPM utilizing scalar checking in subsea cable detection. Importantly, the inherent advantages of the OPM make it particularly well-suited for application in high sea conditions. By emphasizing the significance of the OPM and scalar checking in subsea cable detection, this paper effectively underscores the method’s substantial potential contribution to this domain.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}